Стенд для испытания двигателя внутреннегосгорания - SU850027A3
Код документа: SU850027A3
Чертежи



Описание
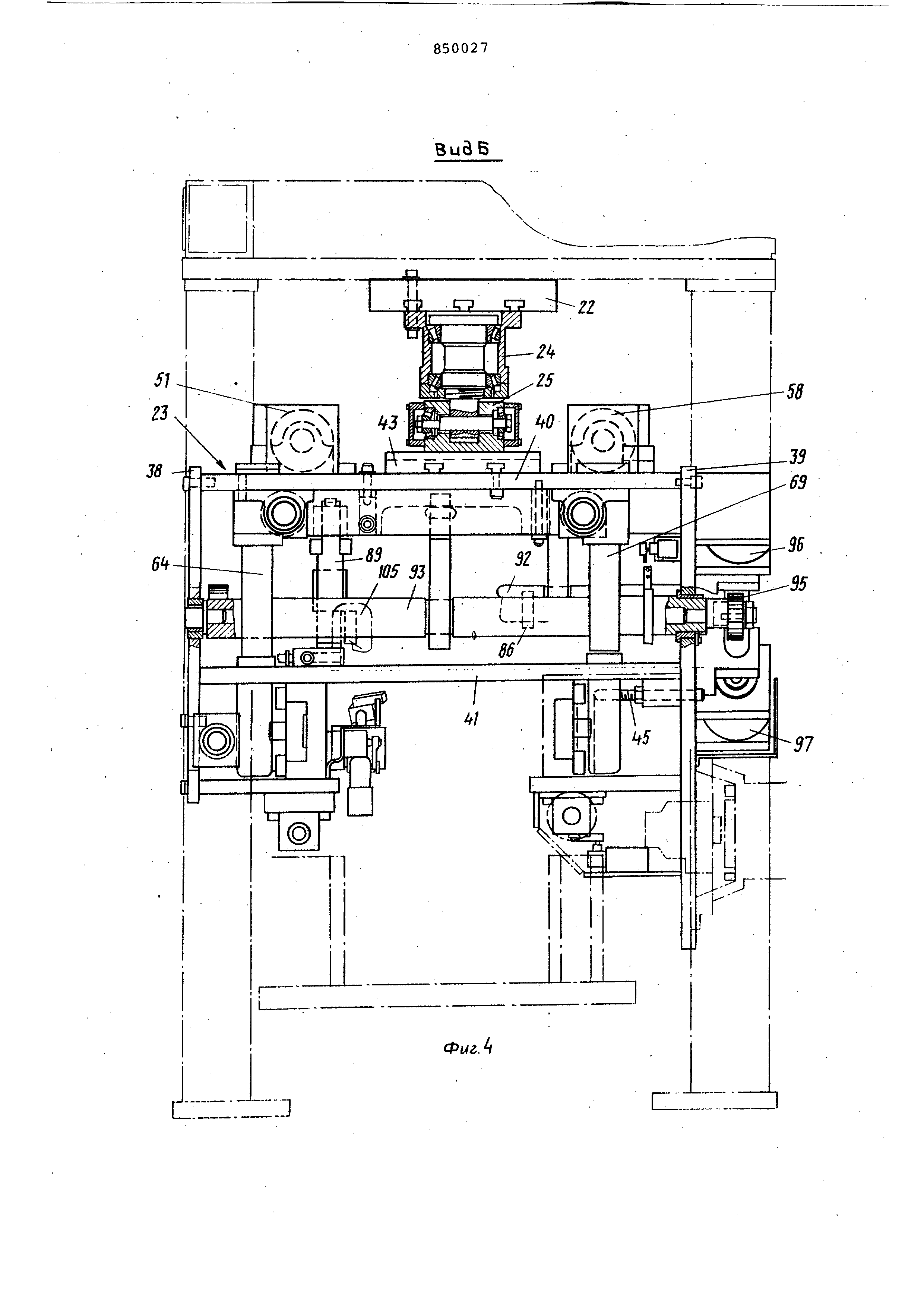
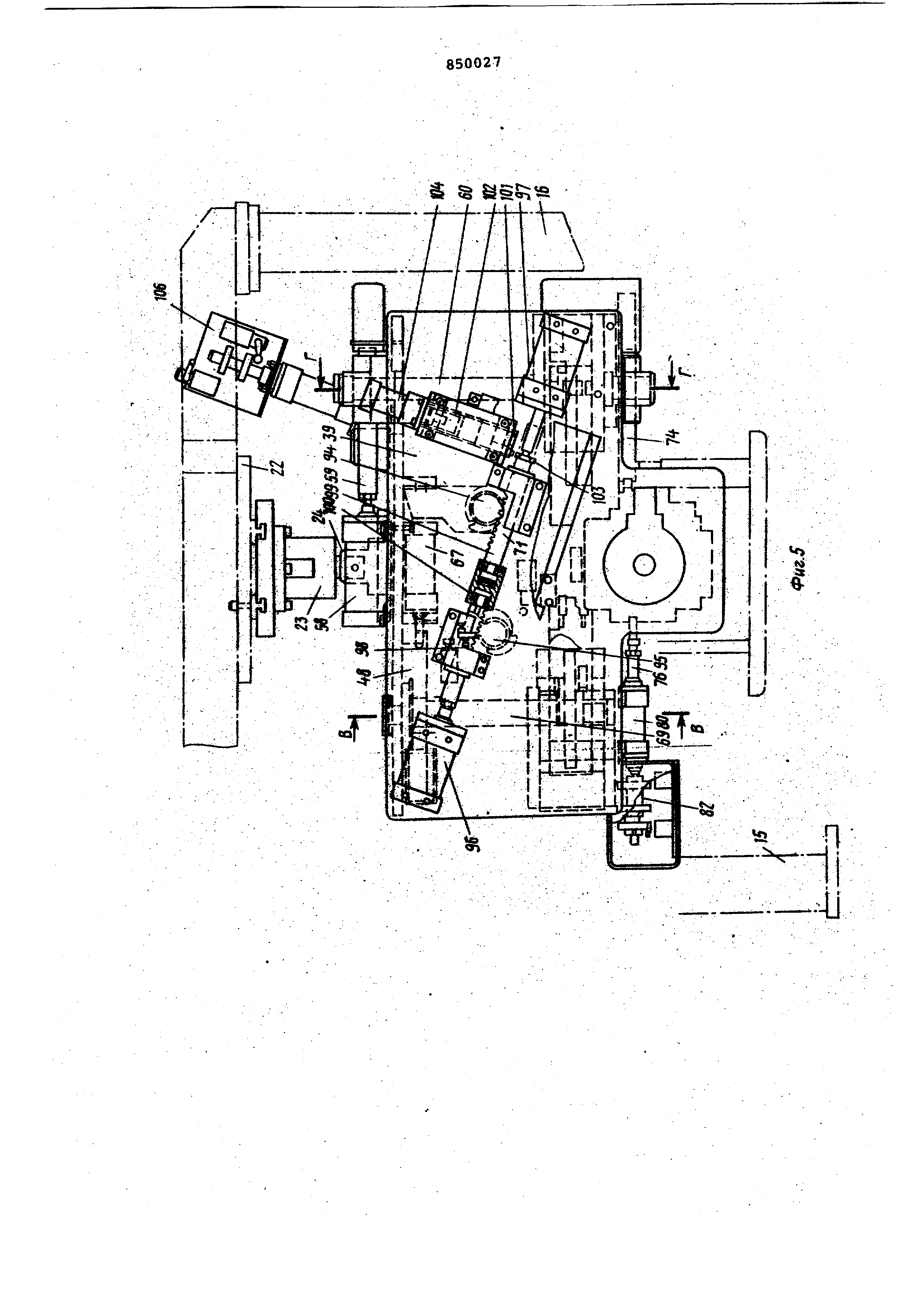
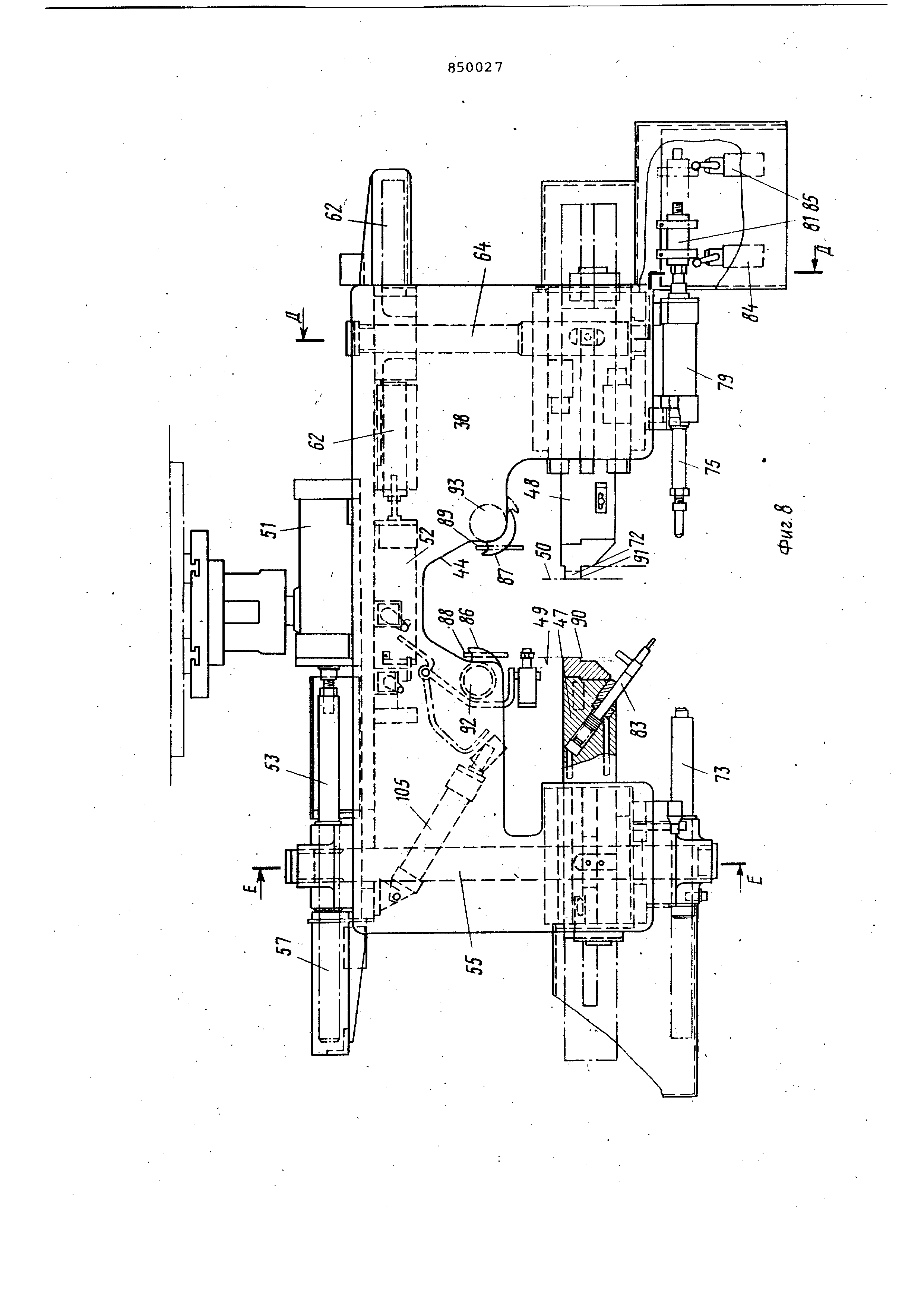
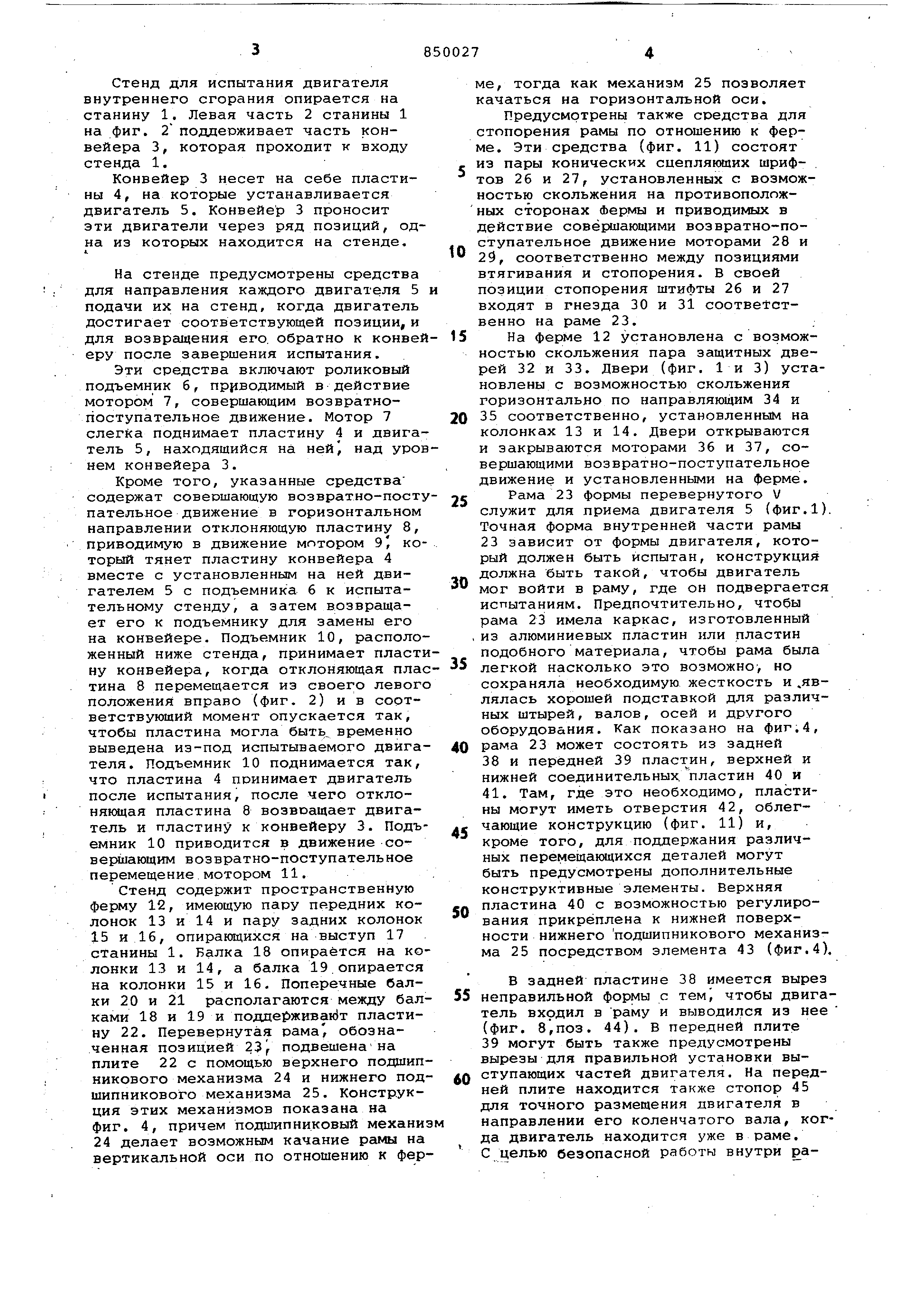
(54) СТЕНД для ИСПЫТАНИЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО Изобретение относится к испытани ям двигателей, а именно к испытател ным стендам, в которых испытуемый двигатель приводится в движение либ под действием его собственной энерг либо при помощи внешнего источника энергии, и может быть использовано для измерения динамического дисбаланса двигателя.. Известны стенды для испытания двигателя внутреннего сгорания, содержащие связанное с валом двигателя нагрузочное устройство, выполненное в виде-гидростатической системы , включающей в себя первую связанную с валом двигателя установку; вторую установку, связанную, с первой замкнутым гидравлическим контуром , и устройство для регулирования производительности второй установки 1 . Однако известные стенды не позво ют проводить в дополнение к горячим и холодные испытания двигателя. Цель изобретения - проведение вы борочных холодных и горячих испытаний , то есть испытаний с получением различных характеристик, когда двигатель приводится в движение с поСГОРАНИЯ мощью внешних источников, а также без них. Цель достигается тем, что первая установка выполнена в виде двигателя с постоянной производительностью, а вторая - в.виле. насоса с переменной производительностью. На фиг. 1 представлена вертикальная проекция задней стороны испытательного стенда и связанного с ним оборудования;- на/фиг. 2 - вил А на фиг. 1; на фиг. 3 - вертикальная проекция задней стороны испытательного стенда; на фиг. 4 - вид Б на фиг. 3 с частичным вырезом; на фиг.5вертикальная проекция переднего конца испытательного стенпа с частичным вырезом; на фиг. 6 - сечение В-В на фиг. 5} на фиг. 7 - сечение Г-Г на фиг. 5; на фиг. 8 - вертикальная проекция заднего конца рамы; на фиг. 9 сечение Д-Д на фиг. 8; на фиг. 10 сечение Е-Е на фиг. В; на фиг. 11 вид рамы в плане; на фиг. 12 - боковая вертикальная проекция системы подвода механической энергии к коленчатому валу двигателя; на фиг. 13 вид Ж на фиг. 12; на фиг. 14 - вид И на фиг. 13; на фиг, 15 - вилкообразный рычаг в увеличенном масштабе. Стенд для испытания двигателя внутреннего сгорания опирается на станину 1. Левая часть 2 станины 1 на фиг. 2 поддерживает часть конвейера 3, которая проходит к входу стенда 1. Конвейер 3 несет на себе пластины 4, на которые устанавливается двигатель 5. Конвейер 3 проносит эти двигатели через ряд позиций, одна из которых находится на стенде. На стенде предусмотрены средства для направления каждого двигателя 5 подачи их на стенд, когда двигатель достигает соответствующей позиции, и для возвргицения его. обратно к конвей еру после завершения испытания. Эти средства включают роликовый подъемник б, пр{1:водимый в действие мотором 7, совершающим возвратнопоступательное движение. Мотор 7 слегка поднимает пластину 4 и двигатель 5, находящийся на ней) над уров нем конвейера 3. Кроме того, указанные средства содержат совеошающую возвратно-посту пательное движение в горизонтальном направлении отклоняющую пластину 8, приводимую в движение мотором 9J который тянет пластину конвейера 4 вместе с установленным на ней двигателем 5 с подъемника 6 к испытательному стенду, а затем возвращает его к подъемнику для замены его на конвейере. Подъемник 10, расположенный ниже стенда, принимает пласти ну конвейера, когда отклоняющая плас тина 8 перемещается из своего левого положения вправо (фиг. 2) ив соответствующий момент опускается так, чтобы пластина могла быть, временно выведена из-под испытываемого двигателя . Подъемник 10 поднимается так, что пластина 4 принимает двигатель после испытания, после чего отклоняющая пластина 8 возвоащает двигатель и пластину к конвейеру 3. Подъемник 10 приводится в движение совершающим возвратно-поступательное перемещение мотором 11. Стенд содержит пространственную ферму 12, имеющую пару передних колонок 13 и 14 и пару задних колонок 15 и 16, опирающихся на выступ 17 станины 1. Балка 18 опирается на колонки 13 и 14, а балка 19.опирается на колонки 15 и 16. Поперечные балки 20 и 21 располагаются между балками 18 и 19 и подде живак1т пластину 22. Перевернутая рама обозначенная позицией 23f подвешенана плите 22 с помощью верхнего подшипникового механизма 24 и нижнего под шипникового механизма 25. Конструкция этих механизмов показана на фиг. 4, причем подшипниковый механиз 24 делает возможным качание рамы на вертикальной оси по отношению к ферме , тогда как механизм 25 позволяет качаться на горизонтальной оси. Предусмотрены также средства для стопорения рамы по отношению к ферме . Эти средства (фиг. 11) состоят из пары конических сцепляющих шрифтов 26 и 27, установленных с возможностью скольжения на противоположных сторонах Фермы и приводимых в действие совершающими возвратно-поступательное движение моторами 28 и 25, соответственно между позициями втягивания и стопорения. В своей позиции стопорения штифты 26 и 27 входят в гнезда 30 и 31 соответственно на раме 23. На ферме 12 установлена с возможностью скольжения пара защитных дверей 32 и 33. Двери (фиг. 1 и 3) установлены с возможностью скольжения горизонтально по направляющим 34 и 35 соответственно, установленным на колонках 13 и 14. Двери открываются и закрываются моторами 36 и 37, совершающими возвратно-поступательное движение и установленными на ферме. Рама 23 формы перевернутого V служит для приема двигателя 5 (фиг.1). Точная форма внутренней части рамы 23 зависит от формы двигателя, который должен быть испытан, конструкция должна быть такой, чтобы двигатель мог войти в раму, где он подвергается испытаниям. Предпочтительно, чтобы рама 23 имела каркас, изготовленный ИЗ алюминиевых пластин или пластин подобного материала, чтобы рама была легкой насколько это возможно, но сохраняла необходимую жесткость и .являлась хорошей подставкой для различных штырей, валов, осей и другого оборудования. Как показано на фиг.4, рама 23 может состоять из задней 38и передней 39 пластеин, верхней и нижней соединительных, пластин 40 и 41. Там, где это необходимо, пластины могут иметь отверстия 42, облегчающие конструкцию (фиг. 11) и, кроме того, для поддержания различных перемещающихся деталей могут быть предусмотрены дополнительные конструктивные элементы. Верхняя пластина 40 с возможностью регулирования прикреплена к нижней поверхности нижнего подшипникового механизма 25 посредством элемента 43 (фиг.4). В задней пластине 38 имеется вырез неправильной формы с тем) чтобы двигатель входил в раму и выводился из нее (фиг. 8,поз. 44). В передней плите 39могут быть также предусмотрены вырезы для правильной установки выступающих частей двигателя. На передней плите находится также стопор 45 для точного размещения двигателя в направлении его коленчатого вала, когда двигатель находится уже в раме. С целью безопасной работы внутри рамы установлен кожух махового колеса 46 (фиг. 3).
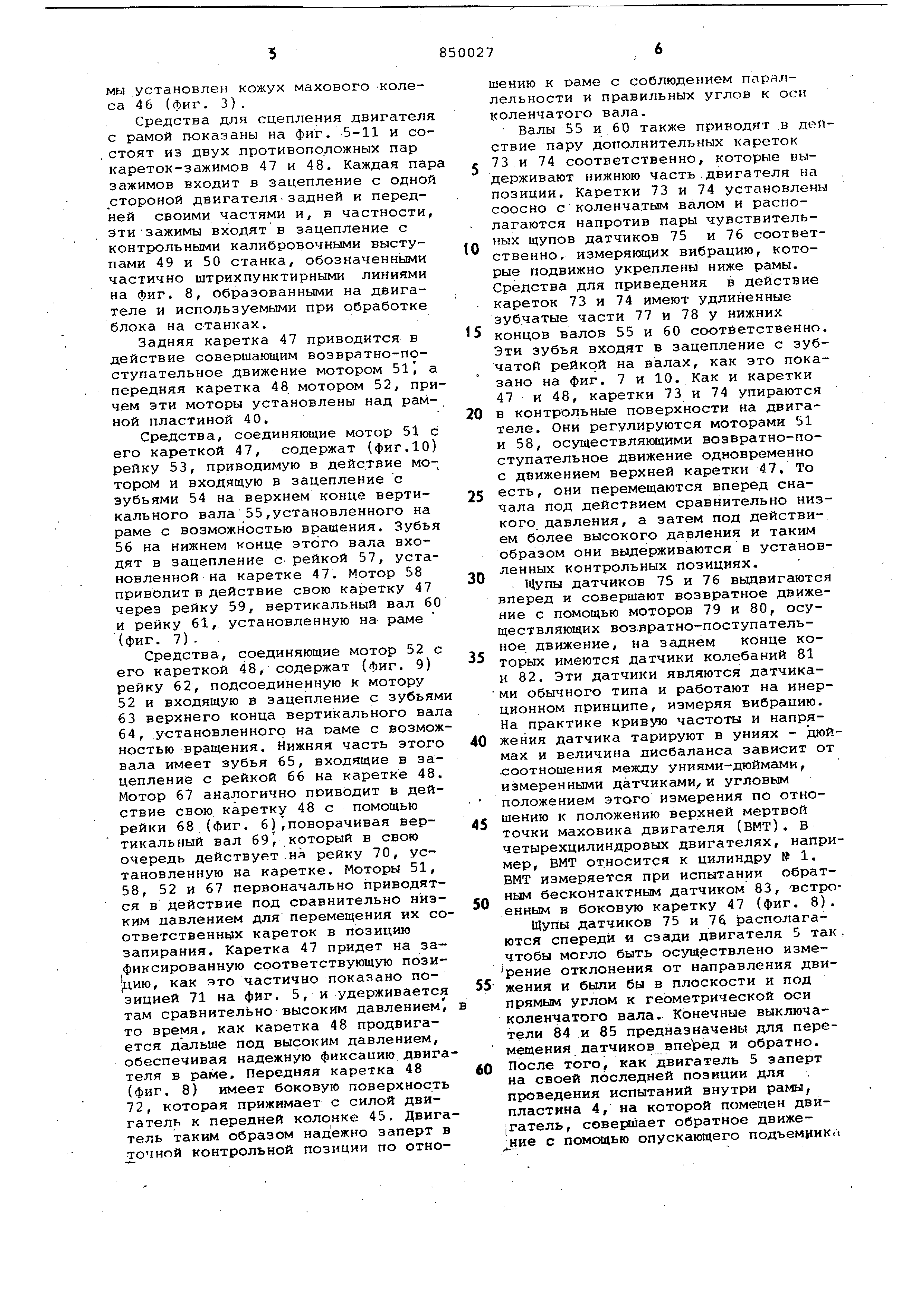
Средства для сцепления двигателя с рамой показаны на фиг. 5-11 и со .стоят из двух противоположных пар кареток-зажимов 47 и 48. Каждая пар зажимов входит в зацепление с одной .стороной двигателязадней и передней своими частями и, в частности, этизажимы входят в зацепление с контрольными калибровочными выступами 49 и 50 станка, обозначенными частично штрихпунктирными линиями на фиг. 8, Образованными на двигателе и используемыми при обработке блока на станках.
Задняя каретка 47 приводится в действие совершающим возвратно-поступательное движение мотором 51, а передняя каретка 48 мотором 52, причем эти моторы установлены над рамной пластиной 40.
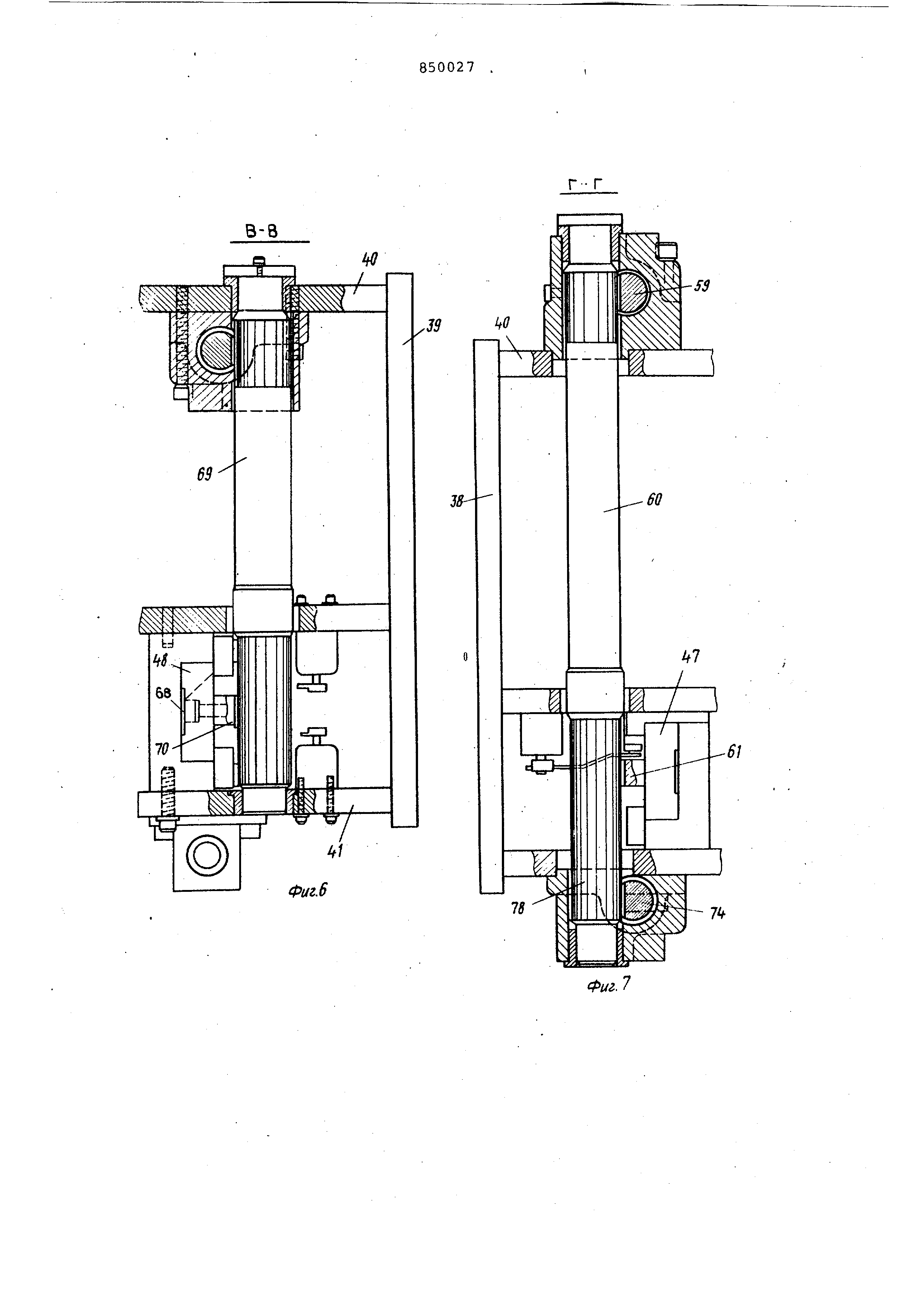
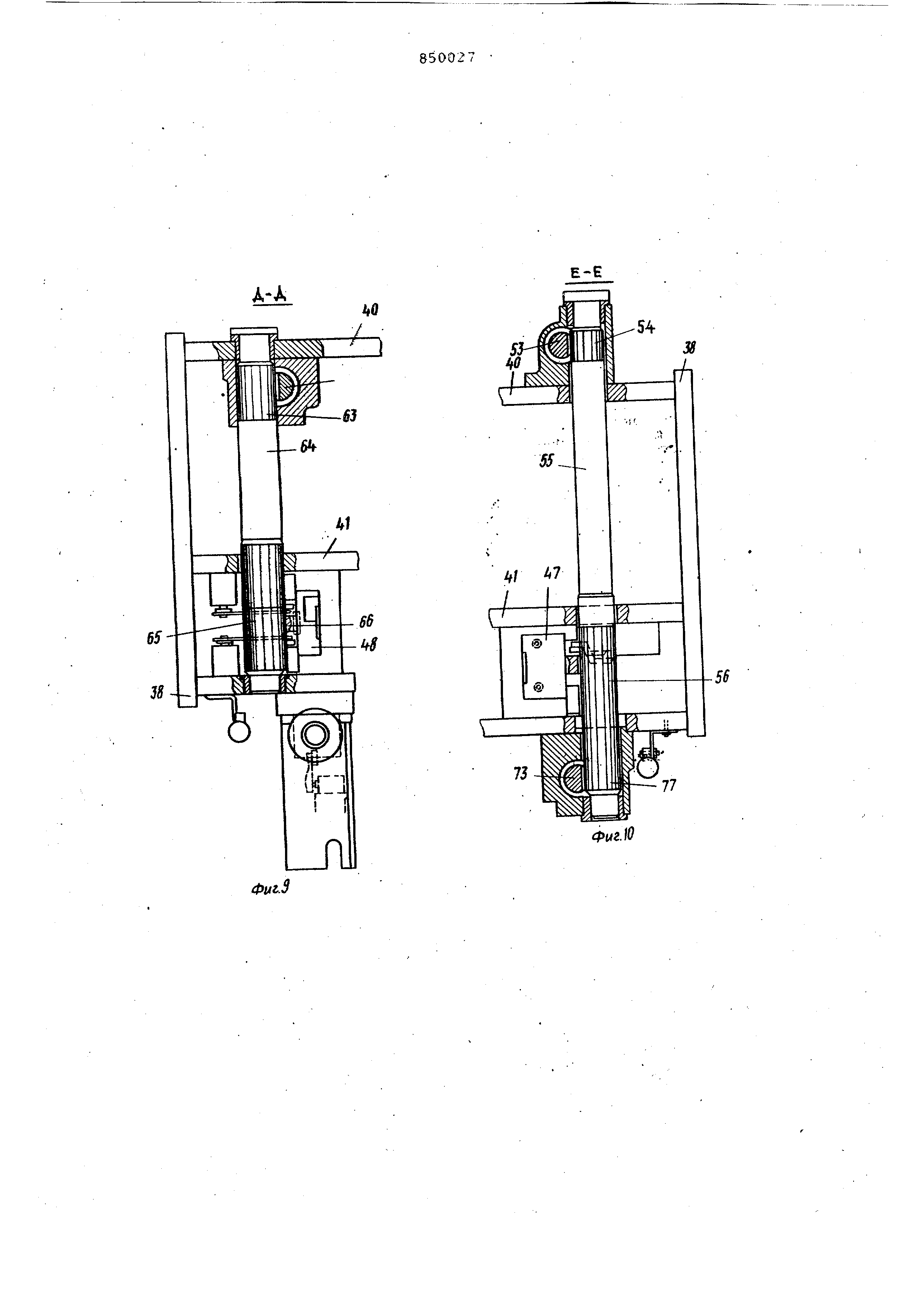
Средства, соединяющие мотор 51 с его кареткой 47, содержат (фиг.10) рейку 53, приводимую в действие мотором и входящую в зацепление с зубьями 54 на верхнем конце вертикального вала 55,установленного на раме с возможностью вращения. Зубья 56 на нижнем конце этого вала входят в зацепление с рейкой 57, установленной на каретке 47. Мотор 58 приводит в действие свою каретку 47 через рейку 59, вертикальный вал 60 и рейку 61, установленную на раме (фиг. 7).
Средства, соединяющие мотор 52 с его кареткой 48, содержат (фиг. 9) рейку 62, подсоединенную к мотору 52 и входящую в зацепление с зубьями 63 верхнего конца вертикального вала 64, установленного на оаме с возможностью вращения. Нижняя часть этого вала имеет зубья 65, входящие в зацепление с рейкой 66 на каретке 48. Мотор 67 аналогично ПРИВОДИТ в действие свою каретку 48 с помощью рейки 68 (фиг. 6),поворачивая вертикальный вал 69 который в свою очередь действует .ня рейку 70, установленную на каретке. Моторы 51, 58, 52 и 67 первоначально приводятся в действие под соавнительно низким давлением для перемещения их соответственных кареток в позицию запирания. Каретка 47 придет на зафиксированную соответствующую позицию , как ято частично показано позицией 71 на фиг. 5, и удерживается там сравнительно высоким давлением , то время, как каретка 48 продвигается дальше под высоким давлением, обеспечивая надежную фиксацию двигателя в раме. Передняя каретка 48 (фиг. 8) имеет боковую поверхность 72, которая прижимает с силой двигатель к передней колонке 45. Двигатель таким образом заперт в точной контрольной позиции по отношению к оаме с соблюдением параллельности и правильных углов к оси коленчатого вала.
Валы 55 и 60 также приводят ц действие пару дополнительных кареток 73 и 74 соответственно, которые выдерживают нижнюю часть.двигателя на позиции. Каретки 73 и 74 установлены соосно с коленчатым валом и располагаются напротив пары чувствительных щупов датчиков 75 и 76 соответ10 ственно, измеряющих вибрацию, которые подвижно укреплены ниже рамы. Средства для приведения в действие кареток 73 и 74 имеют удлиненные зубчатые части 77 и 78 у нижних
15 концов валов 55 и 60 соответственно. Эти зубья входят в зацепление с зубчатой рейкой на валах, как это показано на фиг. 7 и 10. Как и каретки 47 и 48, каретки 73 и 74 упираются
0 в контрольные поверхности на двигателе . Они регулируются моторами 51 и 58, осуществляющими возвратно-поступательное движение одновременно с движением верхней каретки 47. То есть, они перемещаются вперед сна5 чала под действием сравнительно низкого давления, а затем под действием более высокого давления и таким образом они выдерживаются в установленных контрольных позициях.
0
Щупы датчиков 75 и 76 выдвигаются вперед и совершают возвратное движение с помощью моторов 79 и 80, осуществляющих возвратно-поступательное , движение, на заднем конце ко5 торых имеются датчики колебаний 81 и 82. Эти датчики являются датчиками обычного типа и работают на инерционном принципе, измеряя вибрацию. На практике кривую частоты и напря0 жения датчика тарируют в униях - дюймах и величина дисбаланса зависит от .соотношения между униями-дюймами, измеренными датчиками, и угловым положением этого измерения по отношению к положению верхней мертвой
5 точки маховика двигателя (ВМТ). В четырехцилиндровыэс двигателях, например , ВМТ относится к цилиндру № 1. ВМТ измеряется при испытании обратным бесконтактным датчиком 83, -встро0 енным в боковую каретку 47 (фиг. 8). Щупы датчиков 75 и 76 располагаются спереди и сзади двигателя 5 так. чтобы могло быть осуществлено измерение отклонения от направления дви5 жения и были бы в плоскости и под прямым углом к геометрической оси коленчатого вала. Конечные выключатели 84 и 85 предназначены для перемещения датчиков вперед и обратно. После того, как двигатель 5 заперт
0 на своей последней позиции для проведения испытаний внутри рамы, пластина 4, на которой помещен дви|Гатель , совершает обратное движение с помощью опускающего подъемника
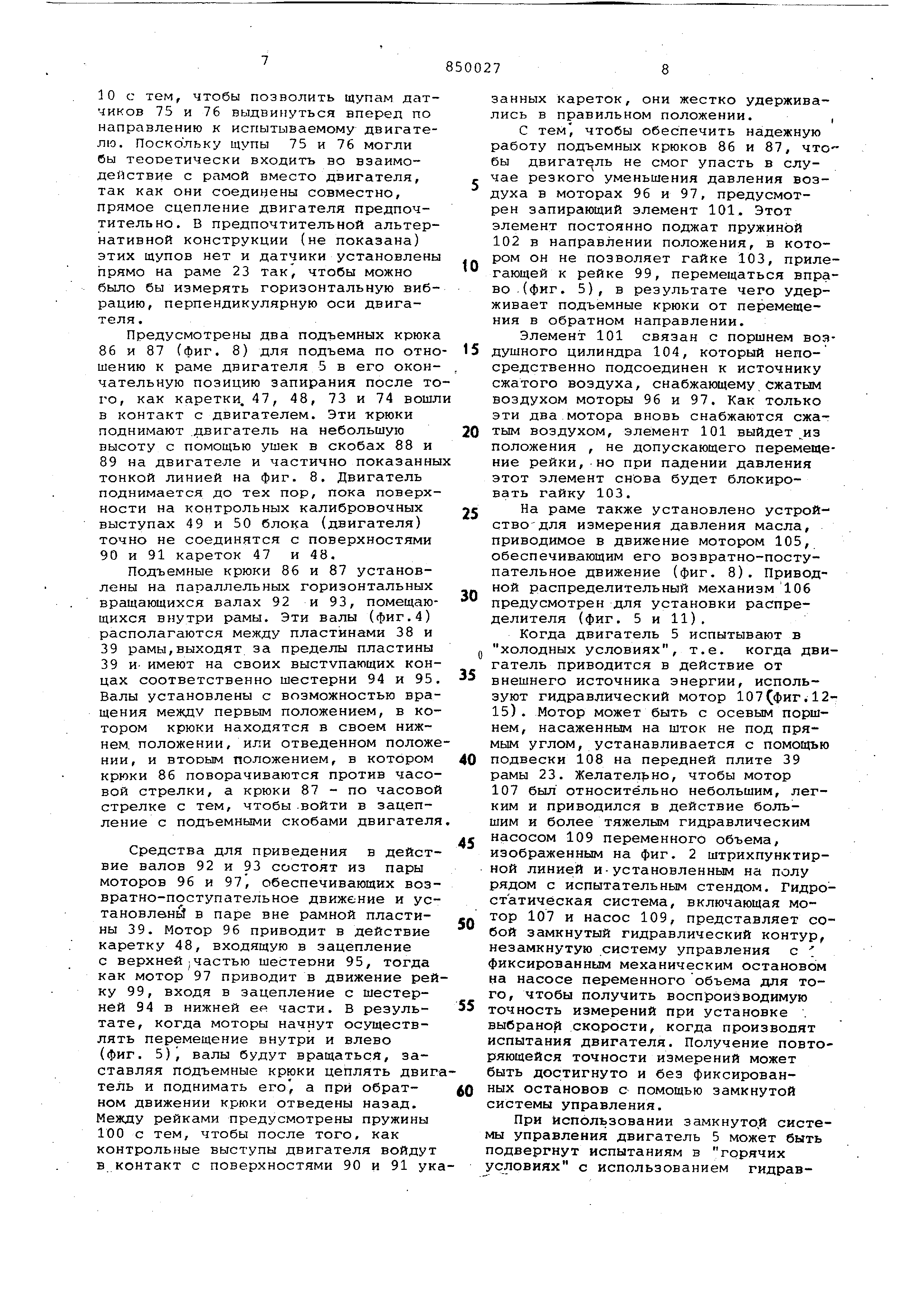
10с тем, чтобы позволить щупам датчиков 75 и 76 выдвинуться вперед по направлению к испытываемому двигателю . Поскольку щупы 75 и 76 могли бы теоретически входить во взаимодействие с рамой вместо двигателя, так как они соединены совместно, прямое сцепление двигателя предпочтительно . В предпочтительной альтернативной конструкции (не показана) этих щупов нет и датчики установлены прямо на раме 23 так , чтобы можно было бы измерять горизонтальную вибрацию , перпендикулярную оси двигателя .
Предусмотрены два подъемных крюка 86 и 87 (фиг. 8) для подъема по отношению к раме двигателя 5 в его окончательную позицию запирания после того , как каретки. 47, 48, 73 и 74 вошл в контакт с двигателем. Эти крюки поднимают .двигатель на небольшую высоту с помощью ушек в скобах 88 и
89на двигателе и частично показанны тонкой линией на фиг. 8. Двигатель поднимается до тех пор, пока поверхности на контрольных калибровочных выступах 49 и 50 блока (двигателя) точно не соединятся с поверхностями
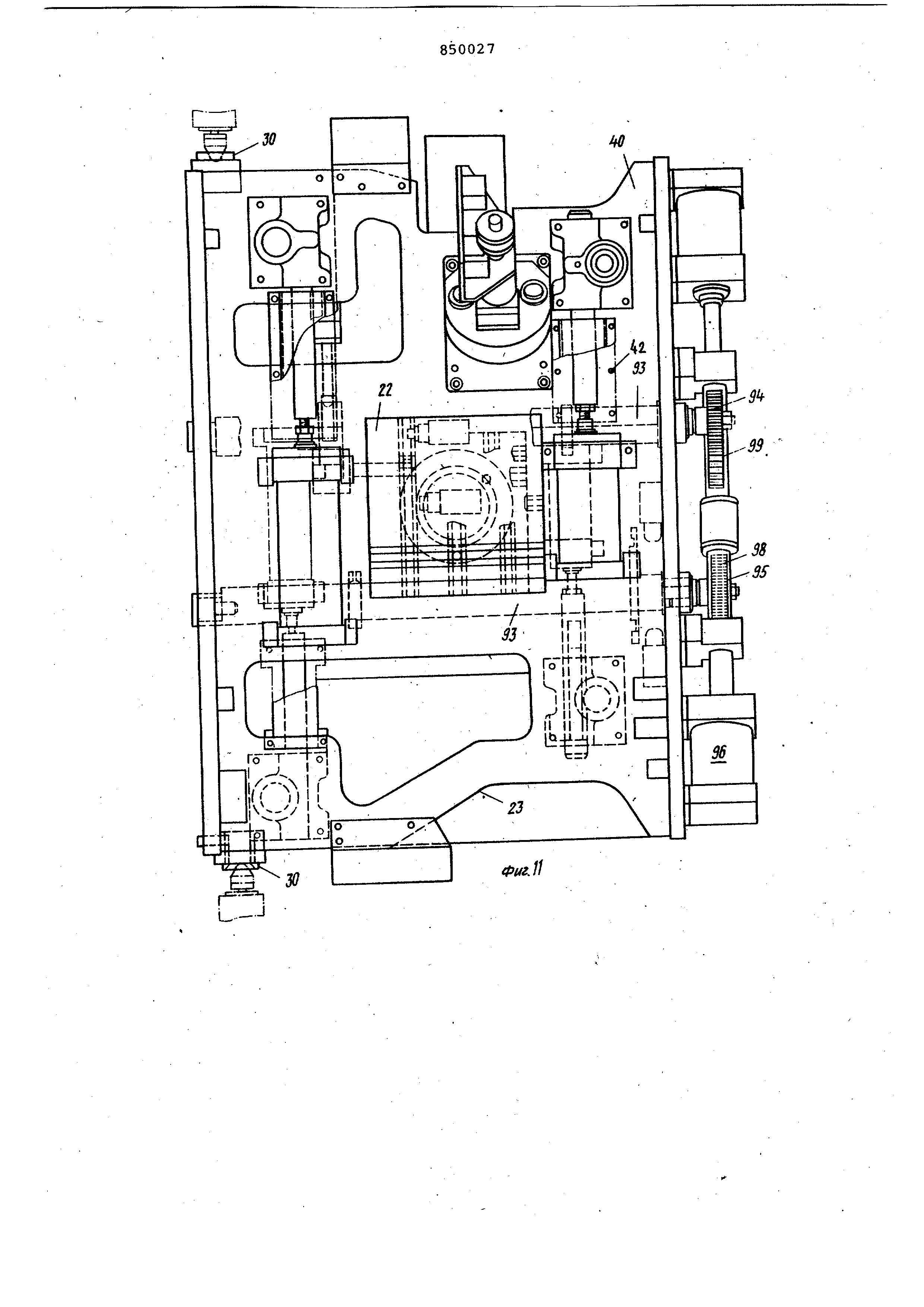
90и 91 кареток 47 и 48. Подъемные крюки 86 и 87 установлены на параллельных горизонтальных вращающихся валах 92 и 93, помещающихся внутри рамы. Эти валы (фиг.4) располагаются между пластинами 38 и 39 рамы,выходят за пределы пластины 39 и- имеют на своих выступающих концах соответственно шестерни 94 и 95. Валы установлены с возможностью вращения между первым положением, в котором крюки находятся в своем нижнем , положении, или отведенном положении , и втооым положением, в котором крюки 86 поворачиваются против часовой стрелки, а крюки 87 - по часовой стрелке с тем, чтобы .войти в зацепление с подъемными скобами двигателя
Средства для приведения в действие валов 92 и 93 состоят из пары моторов 96 и 97, обеспечивающих возвратно-поступательное движение и установленй в паре вне рамной пластины 39. Мотор 96 приводит в действие каретку 48, входящую в зацепление с верхнейJчастью шестерни 95, тогда как мотор 97 приводит в движение рейку 99, входя в зацепление с шестерней 94 в нижней ея части. Б результате , когда моторы начнут осуществлять перемещение внутри и влево (фиг. 5) валы будут вращаться, заставляя подъемные крюки цеплять двигтель и поднимать его , а при обратном движении крюки отведены назад. Между рейками предусмотрены пружины 100 с тем, чтобы после того, как контрольные выступы двигателя войдут в контакт с поверхностями 90 и 91 укзанных кареток, они жестко удерживались в правильном положении.
С тем, чтобы обеспечить надежную работу подъемных крюков 86 и 87, чтобы двигатель не смог упасть в случае резкого уменьшения давления воздуха в моторах 96 и 97, предусмотрен запирающий элемент 101. Этот элемент постоянно поджат пружиной 102 в направлении положения, в котором он не позволяет гайке 103, прилегающей к рейке 99, перемещаться вправо (фиг. 5), в результате чего удерживает подъемные крюки от перемещения в обратном направлении.
Элемент 101 связан с поршнем воздушного цилиндра 104, который непосредственно подсоединен к источнику сжатого воздуха, снабжающему,сжатым воздухом моторы 96 и 97. Как только эти два мотора вновь снабжаются сжатым воздухом, элемент 101 выйдет из положения , не допускающего перемещение рейки, но при падении давления этот элемент снова будет блокировать гайку 103.
На раме также установлено устройство для измерения давления масла, приводимое в движение мотором 105, обеспечив.ающим его возвратно-поступательное движение (фиг. 8). Приводной распределительный механизм 106 предусмотрен для установки распределителя (фиг. 5 и 11),
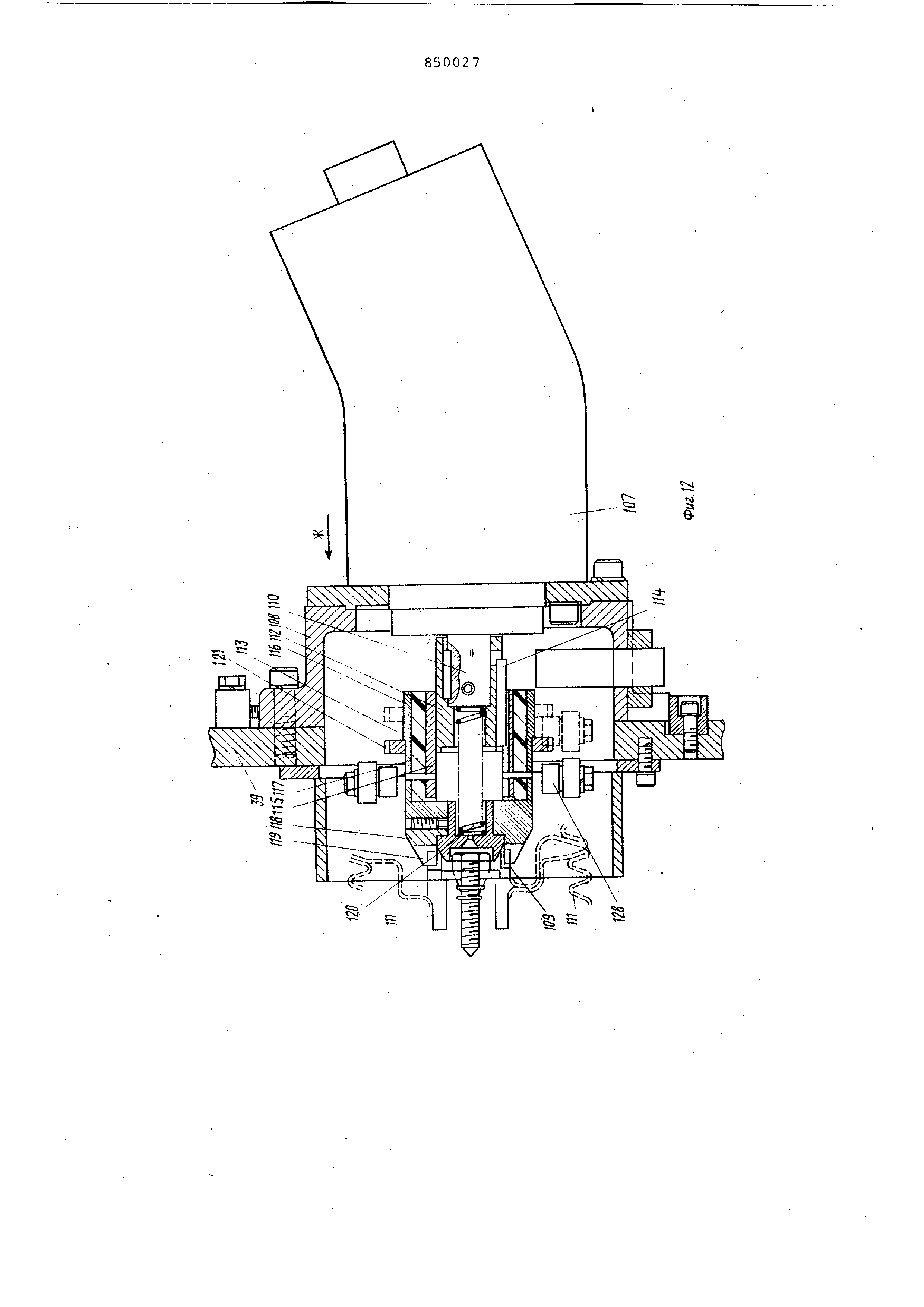
Когда двигатель 5 испытывают в холодных условиях, т.е. когда двигатель приводится в действие от внешнего источника энергии, используют гидравлический мотор 107(фиг.1215 ). Мотор может быть с осевым поршнем , насаженным на шток не под прямым углом, устанавливается с помощью подвески 108 на передней плите 39 рамы 23. Желател зно, чтобы мотор 107 был относительно небольшим, легким и приводился в действие большим и более тяжелым гидравлическим насосом 109 переменного объема, изображенным на фиг. 2 штрихпунктирной линией и-установленным на полу рядом с испытательным стендом. Гидростатическая система, включающая мотор 107 и насос 109, представляет собой замкнутый гидравлический контур, незамкнутую систему управления с фиксированным механическим остановом на насосе переменного объема для того , чтобы получить воспроизводимую точность измерений при установке выбраной скорости, когда производят испытания двигателя. Получение повторяющейся точности измерений может быть достигнуто и без фиксированных остановов с помощью замкнутой системы управления.
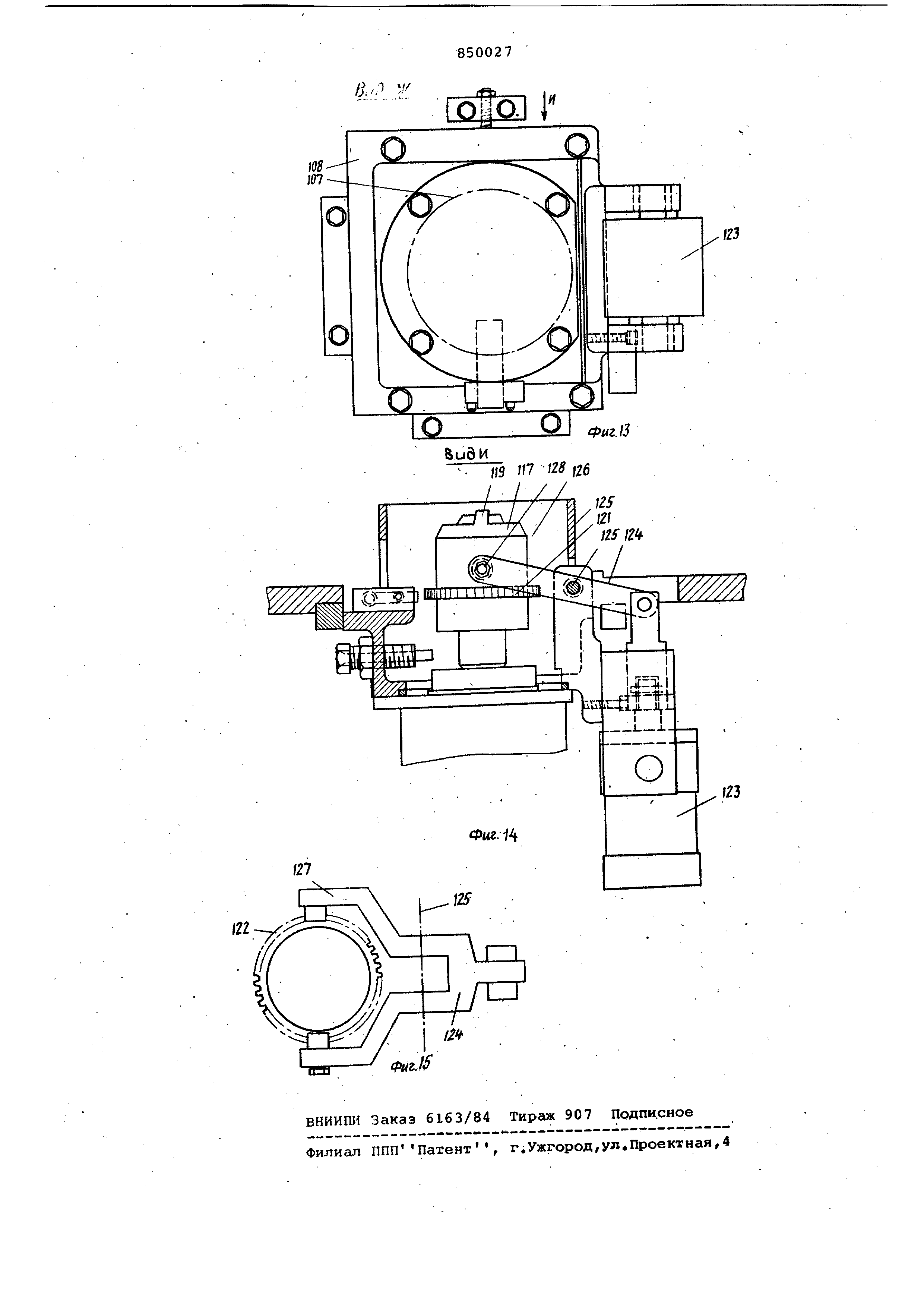
При Использовании замкнутой системы управления двигатель 5 может быть подвергнут испытаниям в горячих условиях с использованием гидравлического мотора 107 в качестве на са и насоса 109 в качестве мотора. Рабочий объем гидравлического насоса 109 следует.изменять с тем, чтобы создавать различные нагрузки или инерционные условия, действующ на испытываемый двигатель, такие н грузки, например, которые возникаю при подъеме автомобиля на гору или, наоборот, с горы. Выходной вал 110 мотора 107 соосен с коленчатым валомдвигателя, ступицей и связанными с ней шкивами 11, которые изображены штрихпунктир ной-линией на Лиг. 12. Гильза 112 насажена на вал 110 с помощью шпонк и несет на себе эластомерную муфту 11. Муфта скользяще установлена на гильзе и соединяется с ней посредством шпонки 114. Муфтаимеет метал лический внутренний элемент 115j металлический внешний элемент 116 и промежуточный эластомерный элемент 117, причем все эти элементы 115, 116и 117 связаны вместе. Эластомерн элемент может иметь к примеру 60 ед ниц твердости уретана, что допускае несоосность приблизительно в 0,0100 ,015 дюйма (дюйм 2,54 см). Этот элемент служит и в качестве изолирующего демпфера , разъединяя .привод мый в действие элемент 116 с другим элементами, а также СЛУЖИТ для умен шения отношения паразитного веса к весу самого двигателя. Выступающий конец элемента 116 имеет коническую поверхность 118 для осуществления центрирования по отношению к ступице коленчатого вала . Пара выступов 119 на поверхност 117входит в пару пазов на ступице коленчатого вала, изображенных на фиг. 12 штрих-пунктирной линией. Эл мент 116 входит в позицию зацеплени с коленчатым валом под действием сжатой пружины со спиральной намоткой витков 120, расположенной между выступающим концом муфты 113 и валом 110. Зубчатый элемент 121 установлен на элементе 116, а датчик 122, смежный с этим элементов, используется для измерения скорости . вращения. Предусмотрены и средства для отвода муфты 113. Эти средства содерж мотор 123 {рис.14), осуществляющий возвратно-поступательное перемещение , который приводит в действие вилкообразный рычаг 124, посаженный на ось 125, установленную на кожухе 126. Вилка 127 (фиг. .15) рычага 124 несет роликовые подшипники 128, которые располагаются на проти воположных сторонах элемента 116. Когда мотор 123 осуществляет движение вперед из своего положения (фиг. 15.), ролики входят в зацепление с шестерней 121, отводя гильзу в положение, частично показанное на фиг. 12 штрихпунктирной линией. Устройство работает следующим образом. Двигатель 5 встает напротив стенда , подъемник 6 поднимает двигате.пь и плиту, на которой он установлен , с конвейера З, отклоняющая пластина 8 подтягивает двигатель с плитой внутрь рамы. В это время рама зажата внутри фермы 12 выступающими элементами 27. Поэтому рама имеет соосность с фермой 12. Защитные двери 32 и 33 закрыты, каретки 47 и 48 выдвигаются вперед и входят в зацепление с двигателем 5, причем задняя каретка 48 прижимает двигатель к передней колонке 45. Сбоку двигатель удерживается в правильном положении с помощью этих кареток, а также с помощью кареток 73 и 74, которые выдвигаются вместе с каретками 47. Подъемные крюки 86 и 87 затем поднимают испытываемый двигатель, точно располагая его посредством опорных поверхностей 90 и 91 на каретках 47 и 48. В результате этого двигатель жестко установлен i в раме в продольном , боковом и вертикальном направлениях . Подъемник 10 опускает плиту 4 на {Расстояние, достаточное для того, чтобы щупы датчика 75 и 76 доставали до испытываемого двигателя. В это время приводной мотор 107 с вращающимся коленчатым валом соединен с коленчатым валом 111 путем приведения в действие мотора 123, осуществляющего возвратно-поступательное движение, что позволяет пружине 120 перемещать муфту 113 влево (фиг. 12) . Мотор .107 работает на очень малой скорости до тех пор, пока выступы 119 муфты 113 не войдут в выемки 129 на ступице коленчатого вала, и тогда вращает двигатель при скорости на холос.том ходу. Измеряется давление масла, а приводной распределительный механизм подсоединяют к испытываемому двигателю. При малой скорости вращения может быть измерена амплитуда перемещения датчика с тем, чтобы определить наличие чрезмер ,ного шума. При раме, связанной с фермой,двигатель может вращаться с относительно большой скоростью (т.е. 1800 об/мин) с помощью мотора 107. Затем раму выводят из зацепления путем осуществления обратного хода стопорных штифтов. 27. Динамический дисбаланс испытываемого двигателя измеряется с помощью датчиков колебания , выборно настроенных на частоту, соответствующую числу оборотов в минуту , путем определения величины и угла смещения движения испытываемого двигателя-по отношению к ВМТ. Датчики колебания также контролируются
на шум по дигшаэону частот при данной скорости..
Двои мая шарнирная опора для раш
23дает возможность получать постоянные и точные данные по динамическому дисбалансу. Наличие этих шарнирных средств позволяет отсоединять и испытываемый двигатель от объемной фермы. Предпочтительно, чтобы ось вертикального механизма 24 проходила через центр тяжести двигателя , а ось горизонтального механизма 25 должна быть параллельна оси коленчатого вала.
Необходимо, чтобы двигатель 5 вращался с высокой скоростью, достаточной ДЛЯ появления динамического движения . Подвеска состоящая из испытываемого двигателя и рамы, будет иметь две частоты собственных свободных колебаний. Поскольку с момента начала вращения скорость увеличивается , испытываемый двигатель и рама двигаются вместе в напрг(влении, перпендикулярном оси вращения коленчатого Вала, если у этого двигателя будет статический дисбаланс. В случае вращение происходит вокруг горизонтального шарнира или подшипникового механизма 25, а датчик колебаний будет в фазе с синхронным совместным перемещением назад и вперед . Когда скорость возрастает настолько ,. что станет больше этого значения, а динамический дисбаланс присутствует у двигателя тогда двигатель вместе с ргмоЛ начнет поворачиваться вокруг дентра тяжести этой системы, т.е. вокруг вертикального шарнира или подшипникового механизма
24с датчиками колебания, измеряющими амплитуду перемещения движением , которое смещено на по фазе.
При вращении двигателя на боль- гаой скорости может быть .проверена канавка для регулирования момента зажигания с использованием вакуума
и без него. Может быть проверено также и давление масла.
Затем рама 23 вновьскрепляется с фермой сцепляющими штифтами 27, а скорость вращения коленчатого вала понижается до нуля мотором.107. Датчики 75 и 76 отходят назад плита 4 поднимается а различные дpVгиe г механизмы, такие как датчик ВМТ, , средства замера давления масла и распределительный, механизм разъединены . Муфта 113 также отведена в обратное положение под действием иот.ора 123, осуществляющего возвратнопоступательное движение. Подъемные к{яоки 86 и 87 опускаются вниз моторами 96 и 97, а каретки ,73 и 74 отойдут назад в результате работы моторов 51 58, 52 и 67. Двери 32 и 38 откроются и двигатель с плитой, на которой он находится эернется к главному конвейеру отводящей пластиной 8.
ФоЕялула изобретения
Стенд для испытания двигателя внутреннего сгорания, содержащий связанное с вале двигателя рагрузочное гидростатическое устройство) выполненное в виде первой связанной с валом двигателя установки и второй установки , связанной с первой замкнутьпм .гидравлическим контуром, и устройство для регулированияПроизводительности второй установки, о т л и ч а ю щ и и с я тем, что, с целью проведения выборочных холод ,ных и горячих испытаний, первая установка выполнена в виде двигателя с постоянной производительностью, а вторая - в виде насоса с переменной произвс дитёльностью.
Источники информации принятые во гВниманиё при экспертизе
1. Авторское свидетельство СССР 58728, кл. & 01 М 15/00, 1941,.
в-в
S3
60 iF4 I |Г L Й-Ч / и L dd-t j A-jjitsjia -iTTSi
Фиг.10
w
г-тги1 г
1 ИИ J I
, i ij Г--4
€i
11
Jll 1 С:
//mfl . 111
1° Li
Siifi i
4N
- 144--VI
Z
II II nr I
l izHL96
с
23
Фиг. 11
Реферат
Формула
Комментарии