Система и способ (варианты) для диагностики активной опоры двигателя - RU2679748C1
Код документа: RU2679748C1
Чертежи






Описание
Область техники, к которой относится изобретение
Настоящее описание в целом относится к способам и системам для управления двигателем транспортного средства для возбуждения событий ухудшенного сгорания с целью диагностики того, функционируют ли активные опоры двигателя требуемым образом.
Уровень техники/Раскрытие изобретения
Ранее для изолирования вибрации двигателя от кабины и шасси транспортного средства у двигателей были сплошные резиновые опоры, причем резина естественным образом поглощала вибрации от двигателя. Однако, в автомобилях спортивного типа и автомобилях элитного класса, если резина слишком эластична, некоторые маневры транспортного средства могут вызывать большие нагрузки, что может привести к давлению на места соединений в транспортном средстве, например, в системе отработавших газов. Поэтому были разработаны настраиваемые активные опоры двигателя, которыми можно управлять для изменения характеристик демпфирования в зависимости от нагрузки двигателя.
Например, активные опоры двигателя могут быть выполнены с возможностью гибкости при холостом ходе двигателя для поглощения нежелательных вибраций. Однако, при более высоких частотах вращения двигателя, активные опоры двигателя могут быть выполнены с возможностью увеличения жесткости, чтобы ограничить нежелательное движение двигателя, предотвращая, например, давление на места соединений системы отработавших газов. Соответственно, активные опоры двигателя могут достигать низкого шума, вибрации и резкости (ШВР) во время холостого хода, а также могут сократить ШВР и предотвратить нежелательное давление при высоких нагрузках.
В транспортных средствах, где транспортным средством обычно управляет оператор транспортного средства, оператор транспортного средства или другие пассажиры транспортного средства во время определенных условий транспортного средства могут испытывать нежелательные ШВР, что может привести к тому, что оператор транспортного средства передаст транспортное средство в ремонтную мастерскую для диагностики источника нежелательных ШВР. Однако, также могут быть случаи, когда оператор транспортного средства не сможет своевременно распознать нежелательные ШВР для предотвращения осложнений в транспортном средстве, возникающих вследствие нежелательных ШВР. Кроме того, могут происходить частные случаи, например, в случае автономно управляемых транспортных средств (АТС), где транспортное средство или пассажир могут отсутствовать для наблюдения нежелательных ШВР. Таким образом, в таком примере, а также в примерах, где может присутствовать оператор транспортного средства, для определения того, функционируют ли активные опоры двигателя требуемым образом, желательно периодически производить тестовую диагностику.
Авторы настоящего изобретения выявили эти проблемы и разработали системы и способы для, по меньшей мере частичного, разрешения вышеупомянутых проблем. В одном примере обеспечивают способ, в котором во время приведения в движение транспортного средства по меньшей мере частично посредством двигателя, изолируют вибрацию двигателя от кабины и шасси транспортного средства посредством одной или более активных опор двигателя, выполненных с возможностью управления в первом режиме и втором режиме; причем при первом условии увеличивают вибрации двигателя и управляют активными опорами двигателя в первом режиме и втором режиме для диагностирования того, функционируют ли активные опоры двигателя требуемым образом.
В качестве примера, в способе могут подавать топливо к одному или более цилиндрам двигателя посредством управления одним или более топливными инжекторами во время приведения в движение транспортного средства по меньшей мере частично посредством двигателя; причем возбуждение вибраций двигателя включает в себя отключение подачи топлива к предварительно выбранному цилиндру двигателя для возбуждения ухудшенного сгорания в предварительно выбранном цилиндре двигателя
В одном примере в способе могут определять, связаны ли вибрации, исходящие от кабины и шасси транспортного средства и отслеживаемые посредством одного или более датчиков вибрации, с увеличенными вибрациями во время управления активными опорами двигателя в первом режиме и втором режиме во время первого условия. Таким образом, в способе могут указывать, что активные опоры двигателя функционируют требуемым образом, если отслеживаемые вибрации не связаны с увеличенными вибрациями в первом режиме, но при этом отслеживаемые вибрации связаны с увеличенными вибрациями во втором режиме. В другом примере в способе могут указывать заклинивание активных опор двигателя в первом режиме, если отслеживаемые вибрации не связаны с увеличенными вибрациями в первом режиме, и при этом отслеживаемые вибрации связаны с увеличенными вибрациями во втором режиме. В другом примере в способе могут указывать заклинивание активных опор двигателя во втором режиме, если отслеживаемые вибрации связаны с увеличенными вибрациями в первом режиме, и при этом отслеживаемые вибрации также связаны с увеличенными вибрациями во втором режиме.
В качестве примера, определение того, связаны ли вибрации, исходящие от кабины и шасси транспортного средства и отслеживаемые посредством одного или более датчиков вибрации, с увеличенными вибрациями, дополнительно включает в себя указание того, что вибрации, отслеживаемые посредством одного или более датчиков вибрации, связаны с увеличенными вибрациями в ответ на то, что отслеживаемые вибрации выше порогового уровня вибрации в пределах порогового интервала времени увеличенных вибраций. Таким образом, активные опоры двигателя транспортного средства могут периодически диагностировать, даже при условиях, когда транспортное средство, например, управляется автономно. Благодаря периодической диагностике активных опор двигателя транспортного средства, даже при условиях, когда оператор транспортного средства отсутствует, можно избежать осложнений, возникающих в результате неправильного функционирования активных опор двигателя.
Вышеуказанные и другие преимущества и признаки настоящего изобретения будут вполне очевидны из нижеследующего осуществления изобретения, при его рассмотрении отдельно или в связи с приложенными чертежами.
Следует понимать, что приведенное выше раскрытие изобретения приводится в упрощенном виде как набор концепций, которые подробно раскрыты в осуществлении изобретения. Оно не предназначено для обозначения ключевых или основных существенных признаков заявленного объекта изобретения, объем и содержание которого однозначно определяется формулой изобретения, которая следует после осуществления изобретения. Кроме того, заявленный объект не ограничивается осуществлениями, которые устраняют любые недостатки, указанные выше или в какой-либо части настоящего раскрытия.
Краткое описание чертежей:
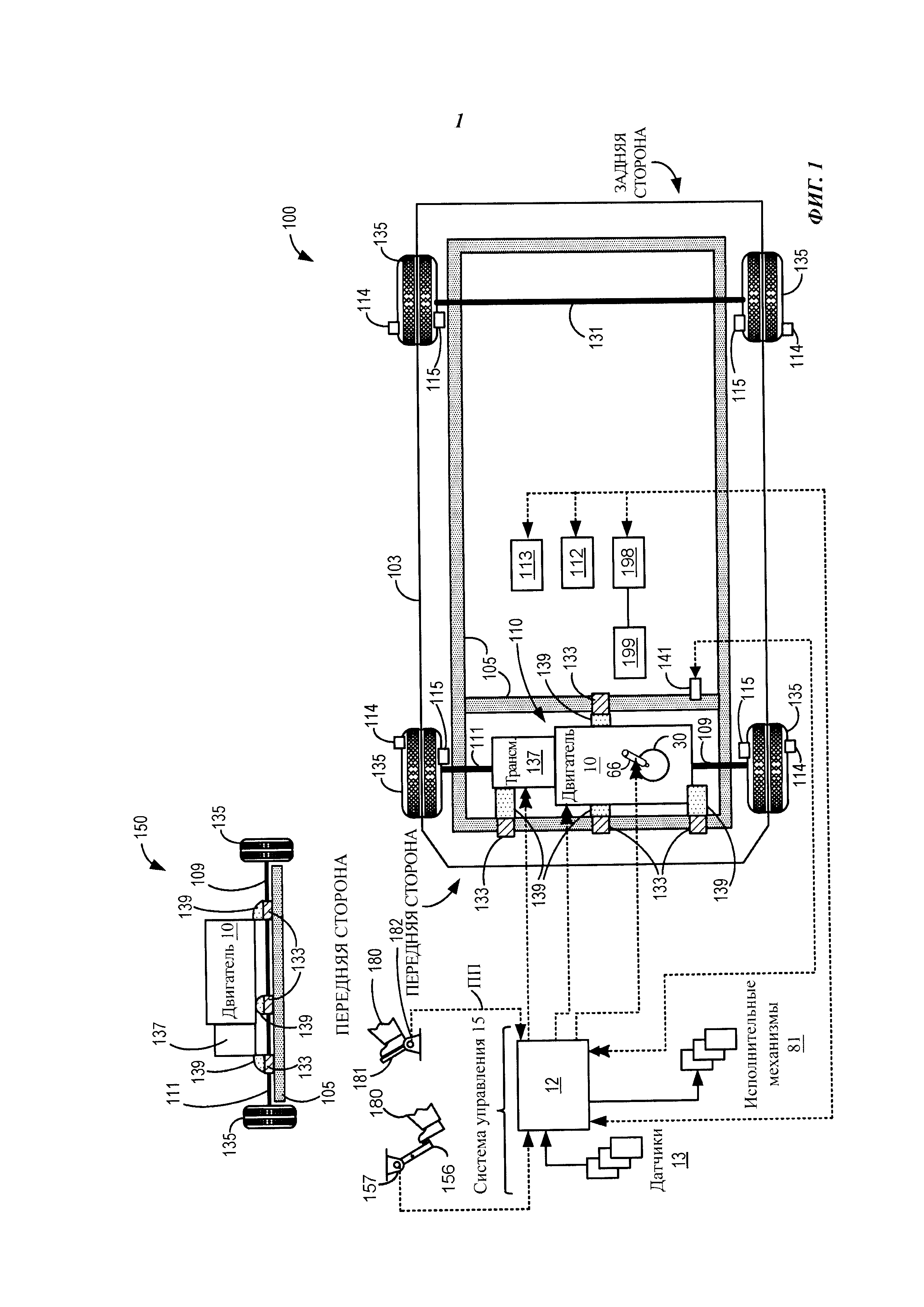
На ФИГ. 1 показано схематичное изображение варианта осуществления транспортного средства, включающего в себя силовой агрегат транспортного средства, соединенный с рамой транспортного средства посредством одной или более активных опор двигателя.
На ФИГ. 2 показан внешний вид активной опоры двигателя, которая может быть включена в состав транспортного средства по ФИГ. 1.
На ФИГ. 3 показано поперечное сечение примера активной опоры двигателя, включая структуру секционирования и элемент разделения.
На ФИГ. 4 схематично показана блок-схема примера системы автономного управления.
На ФИГ. 5 показана высокоуровневая блок-схема примера способа проведения тестовой процедуры диагностики активной опоры двигателя.
На ФИГ. 6 показан пример справочной таблицы для диагностики того, функционируют ли активные опоры двигателя требуемым образом, причем таблица используется в качестве части способа, изображенного на ФИГ. 5.
На ФИГ. 7 изображен пример временной шкалы для проведения процедуры тестовой диагностики активной опоры двигателя, согласно способу, изображенному на ФИГ. 5.
Осуществление изобретения
Нижеследующее описание относится к системам и способам диагностики того, функционируют ли активные опоры двигателя требуемым образом. Например, активные опоры двигателя могут быть выполнены с возможностью изолирования нежелательного шума, вибраций и резкости (ШВР) от шасси и кабины транспортного средства, как показано в системе транспортного средства, изображенной на ФИГ. 1.
На ФИГ.2 изображен пример внешнего вида активной опоры двигателя. В некоторых примерах, активной опорой двигателя могут управлять по меньшей мере в двух положениях, таких, как первый режим демпфирования (например, режим холостого хода) и второй режим увеличения жесткости (например, режим движения). Соответственно, на ФИГ. 3 изображен пример активной опоры двигателя, управляемой в первом режиме демпфирования и втором режиме увеличения жесткости. В некоторых примерах система транспортного средства может содержать транспортное средство, приводимое в движение исключительно двигателем, который сжигает топливо (например, бензин, дизельное или другие виды топлива). Однако, в некоторых примерах, система транспортного средства может содержать гибридное транспортное средство, например, гибридное электрическое транспортное средство (ГЭТС) или гибридное электрическое транспортное средство с подзарядкой от электросети (ГПЭТС). В других примерах система транспортного средства может содержать автономно управляемое транспортное средство (АТС). Соответственно, на ФИГ. 4 изображена система АТС, которая, ради обеспечения возможностей режимов автономной работы транспортного средства, может быть включена в систему транспортного средства по ФИГ. 1. Согласно способу, изображенному на ФИГ. 5, периодически могут диагностировать, функционируют ли активные опоры двигателя требуемым образом. В некоторых примерах проведение тестовой диагностики активной опоры двигателя может включать в себя определение того, функционируют ли активные опоры двигателя требуемым образом, заклинивает ли одна или более активных опор двигателя в режиме демпфирования или заклинивает ли одна или более активных опор двигателя в режиме увеличения жесткости. Таким образом, в некоторых примерах, как показано на ФИГ. 4, для диагностики активных опор двигателя могут использовать справочную таблицу. На ФИГ. 7 изображена временная диаграмма проведения процедуры тестовой диагностики активной опоры двигателя согласно способу по ФИГ. 5.
Перейдем к ФИГ. 1, где схематически изображен вид сверху на пример системы 100 транспортного средства. Система 100 транспортного средства содержит кузов 103 транспортного средства с передней частью, обозначенной, как "ПЕРЕДНЯЯ ЧАСТЬ", и задней частью обозначенной, как "ЗАДНЯЯ ЧАСТЬ". Система 100 транспортного средства может включать в себя множество колес 135. Например, как показано на ФИГ. 1, система 100 транспортного средства может включать в себя первую пару колес, находящуюся вблизи передней части транспортного средства, и вторую пару колес, находящуюся вблизи задней части транспортного средства.
Система 100 транспортного средства может включать в себя двигатель внутреннего сгорания, такой, как пример двигателя 10, соединенный с трансмиссией 137. Двигатель 10 и трансмиссию 137 в настоящем документе могут упоминаться в комбинации, как силовой агрегат 110 транспортного средства или просто силовой агрегат 110. Следует понимать, что в состав силового агрегата 110 транспортного средства также могут быть включены другие компоненты транспортного средства, соединенные с двигателем и/или трансмиссией 137, не отходя от объема настоящего изобретения. Система 100 транспортного средства изображена с трансмиссией с приводом на передние колеса (ППК), где двигатель 10 приводит в движение передние колеса посредством полуосей 109 и 111. В другом варианте осуществления, система 100 транспортного средства может иметь трансмиссию с приводом на задние колеса (ПЗК), которая приводит в движение задние колеса посредством приводного вала (не показан) и дифференциала (не показан), расположенных на задней оси 131. В других примерах, система 100 транспортного средства может включать в себя трансмиссию с приводом на четыре колеса.
Двигатель 10 и трансмиссия 137 могут поддерживаться по меньшей мере частично рамой или шасси 105, который, в свою очередь, могут поддерживаться множеством колес 135. Поэтому, вибрации и движения от двигателя 10 и трансмиссии 137 могут передаваться раме 105. Рама 105 может также обеспечивать поддержку кузову системы 100 транспортного средства и другим внутренним компонентам так, что вибрации от работы двигатели могут передаваться во внутреннюю часть, или кабину, системы 100 транспортного средства. Для сокращения передачи вибраций во внутреннюю часть, или кабину, системы 100 транспортного средства, двигатель 10, и трансмиссия 137 могут быть механически соединены посредством множества элементов 139 с соответствующими активными опорами 133 двигателя. Как раскрыто в настоящем документе, активные опоры двигателя могут относиться к любому типу активных опор двигателя, имеющему возможность изменять свои характеристики демпфирования. Например, такую активную опору могут приводить в относительно гибкое состояние при холостом ходе двигателя для поглощения нежелательной вибрации, но могут приводить в более жесткое состояние при более высоких частотах вращения и нагрузках двигателя для ограничения нежелательного движения двигателя. В одном примере, для изменения характеристик активной опоры двигателя к ней могут выборочно прикладывать вакуум коллектора двигателя. Такой пример будет раскрыт более подробно в отношении ФИГ. 3. Однако, следует понимать, что пример подразумевается иллюстративным, а не ограничивающим. Таким образом, как раскрыто в настоящем документе, активными опорами двигателя могут называть вакуумно-регулируемые опоры двигателя, активные опоры мотора, противодействующие вибрации двигателя посредством подачи команды создания противодействующей тряски для сокращения интенсивности вибрации двигателя, магнитореологические опоры, которые содержат небольшие частицы железа в жидком состоянии, для того, чтобы при прикладывании электрического тока или магнитного поля к жидкости частицы железа выстраивались и эффективно увеличивали вязкость жидкости, и т.д.
Как изображено, двигатель 10, и трансмиссия 137 механически соединены в четырех местах с элементами 139 и посредством элементов 139 - с четырьмя активными опорами 133 двигателя. В других альтернативных вариантах осуществления могут использоваться другие количества элементов и активных опор двигателя без отступления от объема настоящего раскрытия.
Вид 150 изображает вид системы 100 транспортного средства при наблюдении с передней стороны системы 100 транспортного средства. Система 15 управления, включающая в себя контроллер 12, может по меньшей мере частично управлять двигателем 10, а также системой 100 транспортного средства. Контроллер 12 получает сигналы от различных датчиков 13 по ФИГ. 1 и приводит в действие различные исполнительные механизмы 81 по ФИГ. 1 для регулировки работы двигателя на основе полученных сигналов и инструкций, хранящихся в памяти контроллера. В изображенном примере контроллер 12 может получать данные ввода отдатчика 141 вибрации. В одном примере, датчик 141 вибрации может быть акселерометром. Следует понимать, что транспортное средство 100 может включать в себя дополнительные датчики вибрации, прикрепленные к раме 105 транспортного средства, двигателю 10, трансмиссии 137, гидравлическим опорам 133 и т.д без отступления от объема настоящего изобретения.
Например, система 100 транспортного средства также может включать в себя инерционные датчики 199. Инерционные датчики 199 могут содержать одно или более из следующего: продольные, широтные, вертикальные, круговые, наклонные и датчики поворота. В одном примере, инерционные датчики 199 могут быть соединены с блоком 198 управления системой пассивной безопасности (БУСПБ), причем БУСПБ содержит подсистему системы 15 управления. В некоторых примерах, система управления может регулировать мощность двигателя и/или колесных тормозов для увеличения устойчивости транспортного средства в ответ на сигнал от датчика (датчиков) 199. В другом примере, система управления может регулировать систему 111 активной подвески в ответ на данные ввода от инерционных датчиков 199. Система 111 активной подвески может содержать систему активной подвески, имеющую гидравлические, электрические и/или механические устройства, так же, как и системы активной подвески, управляющие высотой транспортного средства на индивидуальной угловой основе (например, независимые регулировки высот четырех углов), на основе осей (например, высоты передней и задней осей транспортного средства), или на основе одной высоты для всего транспортного средства.
Кроме того, система 15 управления и контроллер 12 могут посылать сигналы управления на исполнительные механизмы 81, которые могут включать в себя топливный инжектор 66, соединенный с цилиндром 30, в дополнение к другим исполнительным механизмам двигателя 10 и трансмиссии 137, не изображенной на ФИГ. 1. Для наглядности показаны только один цилиндр 30 и один топливный инжектор 66. Однако, следует понимать, что двигатель 10 может включать в себя множество цилиндров и множество топливных инжекторов. Контроллер 12 может получать данные ввода от различных датчиков, обрабатывать данные ввода и приводить в действие исполнительные механизмы в ответ на обработанные данные ввода на основе инструкции или программного кода, соответствующего одному или более алгоритмам. В одном примере, двигателем 10 могут управлять по меньшей мере частично посредством системы управления, включающей в себя контроллер 12, и посредством данных ввода от оператора 180 транспортного средства, или автономного контроллера (более подробно раскрыто ниже) посредством устройства 181 ввода. В одном примере, устройство 181 ввода включает в себя педаль акселератора и датчик 182 положения педали для генерирования пропорционального положению педали сигнала ПП. Аналогично, система 15 управления может получать указание того, что оператор запрашивает торможение транспортного средства, посредством человека-оператора 180 или автономного контроллера. Например, система 15 управления может получать обратные данные от датчика 157 положения педали, сообщающегося с педалью 156 тормоза. В некоторых примерах, система 100 транспортного средства может включать в себя антиблокировочную тормозную систему 113 (АТС). АТС может включать в себя, например, датчики 114 частоты вращения колес. АТС может также включать в себя по меньшей мере два гидравлических клапана (не показано) в гидравлических тормозах (не показано). Контроллер 12 может отслеживать частоту вращения каждого колеса, и, в ответ на определение того, что колесо вращается значительно медленнее остальных, АТС 113 могут управлять для уменьшения гидравлического давления к тормозу 115 затронутого колеса, таким образом снижая силу торможения на указанное колесо. Альтернативно, в ответ на определение того, что колесо вращается значительно быстрее остальных, АТС 113 могут управлять для увеличения гидравлического давления к тормозу затронутого колеса, таким образом увеличивая силу торможения на указанное колесо. В других примерах, как будет раскрыто ниже, АТС 113 может дать команду на увеличенное давление тормоза к одному или более колесам для того, чтобы обеспечить проведение процедуры тестовой диагностики активной опоры двигателя. В настоящем документе, увеличение давления торможения в одном или более колесах посредством АТС 113 могут упоминать, как запуск одного или более колесных тормозов. Например, как будет детально раскрыто ниже, АТС 113, чтобы провести тестовую диагностику активной опоры двигателя, может запускать один или более колесных тормозов для увеличения жесткости рамы транспортного средства и ее механического соединения с двигателем.
По отношению к системе 100 транспортного средства, шум, вибрации и резкость (ШВР) могут возрастать во время работы двигателя, работы трансмиссии, во время переключения режимов работы двигателя и т.д. Дополнительно, ШВР могут возрастать в результате движения по грубым (например, неровным) поверхностям. Активные опоры 133 двигателя могут быть выполнены с возможностью подавления шума и вибраций транспортного средства по широкому диапазону частот, или альтернативно быть выполненными с возможностью подавления конкретных диапазонов частот вибрации. Таким образом, посредством обычной активной опоры 133 двигателя можно подавлять возникающие от разных источников ШВР.
Например, как раскрыто выше, а также будет обсуждаться ниже, активными опорами 133 двигателя может управлять контроллер 12 в первой конфигурации, или первом режиме, для работы на холостом ходу, и во второй конфигурации, или режиме, для работы при более высоких частотах вращения и нагрузках двигателя. Как будет более подробно раскрыто ниже по отношению к способу, изображенному на ФИГ. 5, для определения того, функционируют ли активные опоры двигателя требуемым образом, могут проводить процедуру тестовой диагностики активной опоры двигателя.
Перейдем к ФИГ. 2, на которой показан внешний вид примера активной опоры 200 двигателя. Следует понимать, что пример подразумевается иллюстративным, а не ограничивающим. Активная опора 200 двигателя может быть примером активной опоры 133 двигателя, показанной в системе 100 транспортного средства на ФИГ. 1. При конфигурации в виде системы транспортного средства на плоской поверхности (например, системы 100 транспортного средства на ФИГ. 1), активная опора 200 двигателя может быть ориентирована по существу в вертикальном направлении. Однако, в других конфигурациях активная опора 200 двигателя может быть ориентирована под наклоном по отношению к вертикали. Однако, используемые в настоящем документе термины "верхний" и "нижний" могут относиться к соответствующим концам стрелки 298, которая указывает ось направления, характерную для активной опоры двигателя. Таким образом, стрелка 298 указывает на соответствующее положение компонентов, составляющих активную опору 200 двигателя, а не ссылку на ориентацию активной опоры 200 двигателя в пределах системы транспортного средства. Дополнительно, верхний конец активной опоры двигателя может относится к концу, ближнему к вершине стрелки 298, а нижний конец активной опоры двигателя может относится к концу, ближнему к концу стрелки 298.
Активная опора 200 двигателя включает в себя верхний внешний корпус 202 с центральным отверстием 212, сформированным в верхней поверхности корпуса. Верхний внешний корпус 202 может быть сформирован из жесткого материала, такого, как металл или твердый пластик. Центральное отверстие 212 выполнено с возможностью получения крепежного элемента или болта 206, который выходит наружу от первого упругого элемента или основного резинового элемента (не показано, но см. ФИГ. 3), для прикрепления к компоненту силового агрегата (например, двигателя 10 на ФИГ. 1) транспортного средства. Болт 206 может быть сформирован из жесткого материала, такого, как сталь или алюминий.
Верхний конец болта 206 может быть выполнен с возможностью вращения вокруг зазора центрального отверстия 212, в то время как нижний конец (не показан) может быть помещен в первый упругий элемент активной опоры двигателя, поэтому нижний конец болта может быть относительно неподвижным по сравнению с верхним концом болта. В другом примере, болт 206 может выходить наружу из несущего элемента (не показан), который частично закреплен в первом упругом элементе корпуса, и может быть выполнен с возможностью передачи вибраций к первому упругому элементу посредством несущего элемента.
Болт 206 может быть соединен с жестким верхним кронштейном 239 посредством крепежного элемента 240. Следует понимать, что верхний кронштейн 239 может быть идентичным элементу 139, раскрытому выше в отношении ФИГ. 1. Верхний кронштейн 239 может быть сформирован из металла или жесткого пластика. Посредством крепежного элемента наружную часть 238 верхнего кронштейна 239 могут соединять с компонентом силового агрегата транспортного средства (например, соединять с компонентом силового агрегата на прикрепленном к нему фланце) посредством крепежного элемента, способом, известным в уровне техники.
Нижний внешний корпус 204 могут прикреплять (например, механически соединять) к верхнему корпусу 202. Нижний корпус 202 может быть сформирован из жесткого материала, такого, как металл или твердый пластик. Посредством множества нижних кронштейнов можно достичь соединения нижнего корпуса с рамой транспортного средства (например, рамой 105 по ФИГ. 1). Таким образом, внешний корпус может и дальше иметь жесткую структуру (например, существенно не сжимаемую), а любые вибрации, поглощаемые от силового агрегата или рамы транспортного средства, могут передаваться первому упругому элементу во внешнем корпусе, причем указанный первый упругий элемент выполнен с возможностью поглощения вибрации.
На ФИГ. 2 показаны первый нижний кронштейн 232 и второй нижний кронштейн 234. Следует понимать, что аналогичным кронштейнам 232 и 234 образом к нижнему корпусу 204 могут присоединять другие кронштейны без отступления от объема изобретения. Нижние кронштейны могут быть сформированы из металла, например, из стали. Однако, для формирования нижних кронштейнов могут использовать и другие материалы без отступления от объема настоящего изобретения. Первый нижний кронштейн 232 показан сформированным за одно целое с нижним корпусом 204. Болт (не показан) соединять (например, механически) нижний кронштейн 232 с рамой транспортного средства может посредством отверстия 282. Второй нижний кронштейн 234 показан соединенным, но не сформированным за одно целое с нижним корпусом 204, и может быть аналогично соединен с рамой транспортного средства посредством отверстия 284.
На ФИГ. 3 показан вид 300 в поперечном разрезе активной опоры двигателя (например, активной опоры 133 двигателя по ФИГ. 1 или активной опоры 200 двигателя по ФИГ. 2). Следует понимать, что активная опора двигателя, изображенная на ФИГ. 3, подразумевается иллюстративной, а не ограничивающей. Термины "верхний" и "нижний", используемые в настоящем документе, могут относится к соответствующим концам стрелки 398, как раскрыто выше со ссылкой на стрелку 298 на ФИГ. 2. Следует понимать, что стрелка 398 может указывать на соответствующее положение компонентов активной опоры двигателя, как раскрыто выше со ссылкой на стрелку 298.
Узел активной опоры двигателя может включать в себя внешний корпус 302 (например, идентичный корпусу 202 по ФИГ. 2), имеющий соответствующие размеры для вмещения первого упругого элемента или основного резинового элемента 304, который обычно имеет форму усеченного конуса и в основном изготавливается из упругого материала, такого, как эластичная резина, как принято в уровне техники. Болт 306 (например, аналогичный болту 206 по ФИГ. 2) может выходить наружу первого упругого элемента для прикрепления к силовому агрегату или двигателю (не показан, но см. ФИГ. 2), как широко известно в уровне техники. В изображенном примере, болт 306 имеет металлический несущий элемент 308, по меньшей мере нижняя часть которого соединена с первым упругим элементом 304. В дополнение, нижняя периферийная часть первого упругого элемента может включать в себя усилитель, например, металлический усилитель 310, сформованный в первом упругом элементе для дополнительной жесткости и опоры. Таким образом, вибрации и/или передвижения от силового агрегата могут передаваться первому упругому элементу 304 активной опоры двигателя.
Как обсуждалось выше в отношении ФИГ. 2, первый упругий элемент вмещается в верхнем внешнем корпусе 302 так, чтобы болт 306 проходил через центральное отверстие 312 в заслонке. Нижняя поверхность 305 первого упругого элемента 304 формирует часть первой или верхней жидкостной камеры 316, а именно сторону высокого давления опоры двигателя. Первую жидкостную камеру 316 могут заполнять гидравлической жидкостью (например, гликолем). Оставшуюся часть первой жидкостной камеры 316 определяют посредством инерционного путевого узла 320. Следует понимать, что инерционный путевой узел 320 в настоящем документе может также упоминаться, как структура секционирования. Внешняя часть верхней поверхности структуры секционирования (обозначенной ссылочным номером 322) граничит с и взаимодействует с образованием уплотнения с первым упругим элементом 304 для герметизации первой жидкостной камеры 316. Вторая внешняя часть структуры секционирования, обозначенная ссылочным номером 324, взаимодействует с образованием уплотнения со вторым упругим элементом 330 (резиновым пыльником или мембраной) и, в частности, его верхней периферийной частью 332. Нижняя поверхность 324 структуры 320 секционирования, в комбинации со второй упругой камерой 330, образует вторую или нижнюю жидкостную камеру 350. Вторую жидкостную камеру могут заполнять гидравлической жидкостью (например, гликолем). Второй упругий элемент 330 защищен крышкой 334 мембраны, предпочтительно сформированной из более жесткого материала, чем упругая мембрана, и это соединяет (например, механически) с нижним внешним корпусом 340. Когда нижний корпус 340 закрепляют с верхним корпусом, нижний периферийный край первого упругого элемента 304 и периферийная часть 332 второго упругого элемента взаимодействует с образованием уплотнения с противоположными сторонами или гранями 322, 324, соответственно, структуры 320 секционирования.
Структура секционирования и работа типичной опоры 300 двигателя кратко раскрыты ниже. Как указано, первая жидкостная камера 316 и вторая жидкостная камера 350 соединены по текучей основе посредством структуры 320 секционирования. Структура 320 секционирования содержит канальную пластину 301, разъединительную муфту 360 (например, эластичную мембрану), первый жидкостный тракт 370 (например, тракт холостого хода), второй жидкостный тракт 440 (например, тракт движения), и вакуумную камеру 365. Вакуумная камера 365 может быть соединена со структурой секционирования для того, чтобы вакуумную камеру можно было определять проходами в канальной пластине 301, и причем сегмент вакуумной камеры определяется разъединительной муфтой 360. Вакуумная камера 365 может быть соединена по текучей среде посредством трубы 380 либо с источником вакуума, либо с источником атмосферного давления. Вакуум могут обеспечивать любым доступным источником вакуума транспортного средства, например, вакуумом впускного коллектора. В одном примере, первое давление 347 (например, атмосферное давление) или второе давление 348 (например, 348) могут прикладывать к вакуумной камере 365 посредством управления двухходовым клапаном 446. Например, как будет более подробно раскрыто ниже, в зависимости от условий работы транспортного средства контроллер 12 может дать указание двухходовому клапану 446 обеспечить первое давление или второе давление в вакуумную камеру 365. В частности, контроллер 12 может посылать сигнал к двухходовому клапану 346 для приведения в действие клапана для подведения либо первого давления 347 в вакуумную камеру 365, либо второго давления 348 в вакуумную камеру 365.
Разъединительная муфта 360 может свободно передвигаться, когда вакуумная камера 365 находится под атмосферным давлением (например, первым давлением). Кроме того, когда вакуумная камера 365 находится под атмосферным давлением, первый вакуумный клапан 355 установлен в верхнее положение в канальной пластине 301 так, чтобы закрывать первый жидкостный тракт 370. При такой конфигурации разъединительная муфта 360 может дышать в ответ на вибрации или перемещения, а поток жидкости между первой жидкостной камерой 316 и второй жидкостной камерой 350 может обеспечиваться исключительно посредством второго жидкостного тракта 375. Поэтому, когда вакуумная камера 365 находится под атмосферным давлением, опора 300 двигателя выполняет функцию разъединенной опоры двигателя. Такая конфигурация активной опоры 300 двигателя может упоминаться, как второй, или режим увеличения жесткости работы активной опоры двигателя.
Альтернативно, приложение вакуума к вакуумной камере 365 может помочь расположить разъединительную муфту 360 впритык к канальной пластине 301, указанной стрелкой 386, и, кроме того, может расположить первый вакуумный клапан в более низкое положение, указанной стрелкой 385. Поэтому, когда открыт первый жидкостный тракт 370, разъединительная муфта 360 не может перемещаться или дышать. Соответственно, поток жидкости между первой жидкостной камерой 316 и второй жидкостной камерой 350 возникает посредством первого жидкостного тракта 370, поскольку первый жидкостный тракт 370 представляет собой путь наименьшего сопротивления через инерционный путевой узел 320, таким образом, обеспечивая смягченную опору двигателя для работы в режиме холостого хода. Иными словами, следует понимать, что при подведении к вакуумной камере 365 второго давления 348 (например, вакуума), активная опора 300 двигателя будет работать в первом, или режиме демпфирования, работы активной опоры двигателя.
Как обсуждалось выше, в некоторых примерах системой 100 транспортного средства могут управлять автономно, так что система 100 транспортного средства может быть автономно управляемой. В таком примере оператор транспортного средства и пассажиры могут присутствовать или отсутствовать в транспортном средстве во время его работы. В тех случаях, когда оператор транспортного средства или пассажиры отсутствуют, могут возникать трудности с диагностикой того, передается ли нежелательная вибрация двигателя к раме и кабине транспортного средства. В таком примере, авторы настоящего изобретения признали необходимость периодической диагностики того, функционируют ли активные опоры двигателя требуемым образом. Однако, следует понимать, что подобный способ диагностики, более подробно раскрытый ниже в отношении ФИГ. 5, не ограничивается использованием в транспортном средстве, управляемом автономно.
На ФИГ. 4 показана блок-схема примера системы 400 автономного вождения, которая может управлять системой 100 транспортного средства, раскрытой выше на ФИГ. 1. В настоящем документе система 100 транспортного средства будет упоминаться просто как "транспортное средство". Система 400 автономного вождения, как показано, включает в себя устройство 410 пользовательского интерфейса, систему 415 навигации, по меньшей мере один датчик 420 автономного вождения и контроллер 425 автономного режима.
Устройство 410 пользовательского интерфейса может быть выполнено с возможностью предоставления информации пассажирам транспортного средства, при условии, что пассажиры транспортного средства присутствуют. Однако, следует понимать, что, при некоторых условиях, транспортное средство может работать автономно при отсутствии пассажиров транспортного средства. Предоставленная информация может включать в себя звуковую информацию или визуальную информацию. Кроме того, устройство 410 пользовательского интерфейса может быть выполнено с возможностью получения данных ввода пользователя. Таким образом, устройство 410 пользовательского интерфейса может быть расположено в пассажирском салоне (не показано) транспортного средства. В некоторых возможных подходах устройство 410 пользовательского интерфейса может включать в себя экран с сенсорным дисплеем.
Навигационная система 415 может быть выполнена с возможностью определения текущего положения транспортного средства, используя, например, систему глобального позиционирования (GPS), приемник, выполненный с возможностью триангулирования положения транспортного средства по отношению к спутникам или наземных передающих вышек. Навигационная система 415 может дополнительно быть выполнена с возможностью разработки маршрутов от текущего местоположения к выбранному месту назначения, а также выводить на экран карту и направления движения к выбранному месту назначения посредством, например, устройства 410 пользовательского интерфейса.
Датчики 420 автономного вождения могут включать в себя любое количество устройств, выполненных с возможностью генерирования сигналов, помогающих транспортному средству в навигации. Примеры датчиков 420 автономного вождения могут включать в себя радиолокационный датчик, лазерный датчик, визуальный датчик (например, камеру), сети инфраструктуры для транспортных средств и т.п. Датчики 420 автономного вождения могут позволить транспортному средству "видеть" дорожное полотно и окружение транспортного средства и/или огибать различные препятствия во время работы транспортного средства 100 в автономном режиме. Датчики 420 автономного вождения могут быть выполнены с возможностью выдачи выходных сигналов датчика, например, в контроллер 425 автономного режима.
Контроллер 425 автономного режима может быть выполнен с возможностью управления одной или более подсистемами 430 во время работы транспортного средства в автономном режиме. Примеры подсистем 430, которыми может управлять контроллер 425 автономного режима, могут включать в себя тормозную подсистему, подсистему подвески, подсистему рулевого управления и подсистему силового агрегата. Контроллер 425 автономного режима может управлять любой одной или более из этих подсистем 430 посредством подачи сигналов к блокам управления, связанным с подсистемами 430. В одном примере, тормозная подсистема может включать в себя антиблокировочную тормозную подсистему, выполненную с возможностью прикладывания силы торможения к одному или более колесам (например, колесам 135). Как обсуждалось в настоящем документе, прикладывание силы торможения к одному или более колесам транспортного средства может упоминаться, как запуск тормозов. Чтобы автономно управлять транспортным средством, контроллер 425 автономного режима может подавать соответствующие команды подсистемам 430. Команды могут привести к работе подсистем в соответствии с характеристиками движения, связанными с выбранным режимом движения. Например, характеристики движения могут включать в себя силу ускорения и замедления транспортного средства, расстояние транспортного средства до идущего впереди транспортного средства, частоту автономного изменения полос движения и т.д.
Таким образом, вышеупомянутые системы могут обеспечивать систему для транспортного средства, содержащую двигатель с одним или более цилиндрами двигателя, и одну или более активных опор двигателя, выполненных с возможностью изолирования вибраций двигателя от шасси транспортного средства и кабины транспортного средства и с возможностью управления в первом режиме демпфирования и втором режиме увеличения жесткости. Система может дополнительно содержать один или более датчиков вибрации, выполненных с возможностью отслеживания вибрации шасси и кабины транспортного средства, и контроллер, содержащий сохраненные в долговременной памяти инструкции. В ответ на указание того, что соблюдены предварительные условия для тестовой процедуры диагностики активной опоры двигателя, контроллер может исполнять инструкции для активного возбуждения событий ухудшенного сгорания в предварительно выбранном цилиндре двигателя. Контроллер может дополнительно дать команду одной или более активным опорам двигателя перейти в режим демпфирования на первый заданный интервал времени, дать команду одной или более активным опорам двигателя перейти в режим увеличения жесткости на второй заданный интервал времени, и перевода одной или более активных опор двигателя в режим демпфирования на третий заданный интервал времени, пока в предварительно выбранном цилиндре двигателя происходят события ухудшенного сгорания.
В такой системе, контроллер может дополнительно отслеживать вибрации посредством одного или более датчиков вибрации во время первого заданного интервала времени, во время второго заданного интервала времени и во время третьего заданного интервала времени. Контроллер может указывать, что активные опоры двигателя функционируют требуемым образом, в ответ на то, что вибрации, отслеживаемые посредством одного или более датчиков вибрации, демпфируются ниже порогового значения вибраций во время первого заданного интервала времени и третьего заданного интервала времени, а не во время второго заданного интервала времени.
В некоторых примерах, контроллер может дополнительно содержать сохраненные в долговременной памяти инструкции, которые при исполнении приводят к тому, что контроллер может указывать, что активные опоры двигателя заклинены в первом режиме демпфирования, в ответ на то, что вибрации, отслеживаемые посредством одного или более датчиков вибрации, демпфируются ниже порогового значения вибрации во время каждого из первого, второго и третьего заданных интервалов времени. В другом примере, контроллер может указывать, что активные опоры двигателя заклинены во втором режиме увеличения жесткости, в ответ на то, что вибрации, отслеживаемые посредством одного или более датчиков вибрации, выше порогового значения вибрации во время каждого из первого, второго и третьего заданных интервалов времени.
В некоторых примерах такая система может дополнительно содержать один или более топливных инжекторов, выполненных с возможностью подачи топлива к одному или более цилиндрам двигателя. В этом примере, контроллер может дополнительно содержать сохраненные в долговременной памяти инструкции, которые при исполнении приводят к тому, что контроллер может дать команду топливному инжектору, выполненному с возможностью подачи топлива в предварительно выбранный цилиндр, прекратить впрыск топлива для активного возбуждения событий ухудшенного сгорания в предварительно выбранном цилиндре двигателя.
В некоторых примерах, соблюдение предварительных условий для осуществления тестовой процедуры диагностики активной опоры двигателя включает в себя одно или более из следующего: условие холостого хода двигателя и интервал времени, прошедший с момента предыдущей диагностики активной опоры двигателя.
В некоторых примерах, система может дополнительно содержать антиблокировочную тормозную систему для увеличения или уменьшения гидравлического давления, прикладываемого к одному или более колесным тормозам, и трансмиссию. В этом примере, в ответ на указание того, что предварительные условия для тестовой процедуры диагностики активной опоры двигателя соблюдены, контроллер может дать команду использовать или поддержать использование колесных тормозов, и дать команду трансмиссии перейти в режим движения.
Переходя к ФИГ. 5, где показан пример высокоуровневого способа 500 для проведения диагностики опоры двигателя. Способ 500 будет раскрыт со ссылкой на системы, раскрытые в настоящем документе и показанные на ФИГ. 1-4, хотя следует понимать, что для других систем могут быть использованы похожие способы без отступления от объема настоящего изобретения. Способ 500 может исполнять контроллер, такой, как контроллер 12 по ФИГ. 1, и он может храниться в долговременной памяти контроллера в виде исполняемых инструкций. Инструкции для исполнения способа 500 могут выполняться контроллером на основе инструкций, хранящихся в памяти контроллера и в сочетании с сигналами, полученными от датчиков системы двигателя, таких, как датчиков, раскрытых выше со ссылками на ФИГ. 1 и 4. Контроллер может приводить в действие исполнительные механизмы системы транспортного средства, такие, как топливные инжекторы (например, инжекторы 66), двухходовый клапан (например, клапан 346), трансмиссию (например, трансмиссию 137), педаль тормоза (например, педаль 156) и т.д. согласно способу, изображенному ниже.
Способ 500 начинается на шаге 505 и может включать в себя оценку текущих условий работы. Условия работы могут оцениваться, измеряться и/или выводиться, а также могут включать в себя одно или более из следующего: условия транспортного средства, такие, как скорость транспортного средства, местоположение транспортного средства и т.д; различные условия двигателя, такие, как состояние двигателя, нагрузку двигателя, В/Т соотношение и т.д; различные условия топливной системы, такие, как уровень топлива, тип топлива, температура топлива и т.д; различные условия системы выделения паров топлива, такие, как загрузка бачка паров топлива, давление топливного бака и т.д; а также различные условия окружающей среды, такие, как температура окружающей среды, влажность, барометрическое давление и т.д.
Переходим к шагу 510, где способ 500 может включать себя указание того, соблюдены ли условия для проведения процедуры диагностики активной опоры двигателя. Например, соблюдение условий может включать в себя состояние включенного двигателя. Соблюдение условий диагностики активной опоры двигателя может дополнительно включать в себя указание того, что транспортное средство находится в режиме холостого хода, в котором двигатель запущен, но транспортное средство не передвигается. Иными словами, соблюдение условий диагностики активной опоры двигателя может включать в себя условия неподвижности транспортного средства. Кроме того, соблюдение условий диагностики активной опоры двигателя может включать в себя прохождение заданного интервала времени с момента предыдущей диагностики активной опоры двигателя. В некоторых примерах, заданный интервал времени может включать в себя 30 дней, или менее 30 дней. В других примерах, заданный интервал времени может включать в себя больше 30 дней, но меньше 60 дней. В других примерах, заданный интервал времени может включать в себя больше 60 дней. Такие примеры приведены в целях пояснения, а не ограничения. Например, датчики вибрации (например, датчики 141) или инерционные датчики (например, датчики 199) могут использоваться для указания нежелательных или чрезмерных вибраций, причем нежелательные или чрезмерные вибрации могут использоваться в качестве начального условия проведения процедуры диагностики активной опоры двигателя.
На шаге 510, если соблюдение условий для процедуры диагностики активной опоры двигателя не указано, способ 500 может переходить к шагу 515 и может включать в себя поддерживание текущих условий работы транспортного средства без проведения процедуры диагностики активной опоры двигателя. Затем способ 500 может завершиться.
Возвращаясь к шагу 510, если указано соблюдение условий для проведения процедуры диагностики активной опоры двигателя, способ 500 может переходить к шагу 520. На шаге 520 способ 500 может включать в себя переключение трансмиссии (например, трансмиссии 137) в режим движения. В частности, трансмиссия транспортного средства может быть выполнена, например, с возможностью парковки, заднего хода, нейтрального режима, режима движения или понижающей передачи. Таким образом, на шаге 520 способ 500 может включать в себя переключение трансмиссии на работу в режиме движения, или, если она уже в режиме движения, поддерживание трансмиссии в режиме движения. Кроме того, на шаге 520 способ 500 может включать в себя запуск колесных тормозов посредством, например, антиблокировочной тормозной системы (например, системы 113), выполненной с возможностью увеличения гидравлического давления к одному или более колесным тормозам для увеличения силы торможения на одно или более колес. В одном примере, где педаль тормоза уже нажата оператором транспортного средства, педаль тормоза могут поддерживать в нажатом положении. Если трансмиссия переведена в режим движения и педаль тормоза нажата, или тормоза активированы, жесткость рамы транспортного средства (например, рама 105) может быть увеличена, и рама может быть механически соединена с двигателем (например, двигателем 10).
Перейдем к шагу 530, где способ 500 может включать в себя отключение подачи топлива к предварительно выбранному цилиндру двигателя (например, цилиндру 30). Например, контроллер транспортного средства может подавать команду топливному инжектору (например, инжектору 66), приводящему в действие топливный инжектор, отключить подачу топлива к предварительно выбранному цилиндру двигателя. В одном примере, предварительно выбранный цилиндр двигателя может включать в себя цилиндр, который, когда подачу топлива к этому цилиндру отключают, вызывает наибольшее количество вибраций, передаваемых к раме транспортного средства. Иными словами, ухудшенное сгорание в предварительно выбранном цилиндре могут возбуждать для того, чтобы механические вибрации двигателя, результат ухудшенного сгорания во время прекращения подачи топлива в предварительно выбранный цилиндр, передавались раме транспортного средства предсказуемым образом. В частности, вибрации от двигателя, передаваемые раме транспортного средства, могут быть связаны с событиями ухудшенного сгорания, поскольку события ухудшенного сгорания могут быть связаны с увеличенными вибрациями, как будет более детально раскрыто ниже.
Перейдем к шагу 530, способ 300 может включать в себя перевод активных опор двигателя в первый режим (например, режиме демпфирования) работы, и может дополнительно включать в себя запись результирующего образца вибрации рамы транспортного средства. В одном примере, со ссылкой на пример активной опоры двигателя (например, опоры 300), изображенной на ФИГ. 3, перевод активных опор двигателя в первый режим, режиме демпфирования, может включать в себя подачу команды двухходовому клапану (например, клапана 346) на соединение вакуума (например, вакуума 348) с вакуумной камерой (например, камерой 365) активной опоры двигателя (например, опоры 300). В одном примере вибрации могут отслеживать посредством датчиков вибрации (например, датчиков 141) или инерционных датчиков (например, датчиков 199). В настоящем документе первый режим работы активной опоры двигателя следует понимать, как включающий в себя режим демпфирования. В режиме демпфирования, вибрации транспортного средства, вызванные событиями ухудшенного сгорания, могут демпфировать посредством активных опор двигателя, для того, чтобы, в соответствии с событиями ухудшенного сгорания, могли быть указаны очень низкие показатели вибрации, или отсутствие вибрации. Иными словами, в режиме демпфирования, или первом режиме, вибрации транспортного средства не могут соотноситься с событиями ухудшенного сгорания. Вместо этого механические вибрации, вызываемые событиями ухудшенного сгорания, могут эффективно демпфироваться посредством активных опор двигателя, так, чтобы посредством вибрационных или инерционных датчиков были указаны очень низкие показатели вибрации, или отсутствие вибрации. Эффективно демпфируемые вибрации в настоящем документе могут упоминаться, как, например, вибрации, находящиеся ниже порогового уровня вибрации.
На шаге 530 подача команды активным опорам двигателя перейти в первый режим может включать в себя подачу команды активным опорам двигателя перейти в первый режим на первый заданный интервал времени. Соответственно, переходя к шагу 535, способ 500 может включать в себя указание того, прошел ли первый заданный интервал времени. Если истечение первого заданного интервала времени не указано, способ 500 может вернуться к шагу 530 и может включать в себя продолжение поддержания активных опор двигателя в первом режиме, и может дополнительно продолжить записывать результирующий образец вибрации рамы транспортного средства.
Альтернативно, в ответ на истечение первого заданного интервала времени на шаге 535, способ 500 может переходить к шагу 540. На шаге 540 способ 500 может включать в себя перевод активных опор двигателя во второй режим работы и может дополнительно включать в себя запись результирующего образца вибрации рамы транспортного средства. Со ссылкой на пример активной опоры двигателя (например, опоры 300), изображенной на ФИГ. 3, подача команды активной опоре двигателя перейти во второй режим работы может включать в себя подачу команды двухходовому клапану (например, клапана 346) на соединение вакуума (например, вакуума 347) с вакуумной камерой (например, камерой 365) активной опоры двигателя. Аналогично случаю, раскрытому выше, вибрации могут отслеживать посредством датчиков вибрации (например, датчиков 141) или инерционных датчиков (например, датчиков 199). В настоящем документе второй режим работы активной опоры двигателя следует понимать, как включающий в себя режим увеличения жесткости. В режиме увеличения жесткости вибрации двигателя, вызываемые событиями ухудшенного сгорания, могут быть значительными или незначительно демпфируемыми, так, чтобы вибрации транспортного средства, записываемые посредством датчиков вибрации или инерционных датчиков, могли быть сопоставлены с событиями ухудшенного сгорания. Как уже обсуждалось, в контроллере может храниться результирующий образец вибрации транспортного средства во время отключения подачи топлива к предварительно выбранному цилиндру и во время работы активных опор двигателя во втором режиме (например, режиме увеличения жесткости). В настоящем документе недостаточно демпфированные вибрации транспортного средства могут упоминать, как вибрации транспортного средства, находящиеся выше порогового уровня вибрации по сравнению с, например, достаточно демпфированными вибрациями транспортного средства, которые могут быть ниже порогового уровня вибрации.
На шаге 540 перевод активных опор двигателя во второй режим может включать в себя перевод активных опор двигателя во второй режим на второй заданный интервал времени. В некоторых примерах, второй заданный интервал времени может отличаться от первого заданного интервала времени. Однако, в других примерах, второй заданный интервал времени может содержать тот же, или практически тот же интервал времени, как и первый заданный интервал времени. Соответственно, переходя к шагу 545, способ 500 может включать в себя указание того, прошел ли первый заданный интервал времени. На шаге 545, если истечение второго заданного интервала времени не указано, способ 500 может вернуться к шагу 540 и может включать в себя продолжение поддерживания активных опор двигателя во втором режиме, и может дополнительно продолжить записывать результирующий образец вибрации рамы транспортного средства.
Альтернативно, в ответ на истечение второго заданного интервала времени на шаге 545, способ 500 может переходить к шагу 550. На шаге 550 способ 500 может включать в себя новое перевод активных опор двигателя в первый режим работы. Как обсуждалось выше, первый режим работы может включать в себя режим работы, при котором активный опоры двигателя работают в режиме демпфирования. Соответственно, пока активные опоры двигателя работают в первом режиме, результирующий образец вибрации транспортного средства могут записывать вновь посредством контроллера транспортного средства. Возвращение к первому режиму работу могут исполнять в течение третьего заданного интервала времени. В некоторых примерах, третий заданный интервал времени может быть таким же, или практически таким же, как и первый заданный интервал времени и/или второй заданный интервал времени. Однако, в других примерах, третий заданный интервал времени может отличаться от первого заданного интервала времени или второго заданного интервала времени.
Таким образом, переходя к шагу 555, способ 500 может включать в себя указание того, прошел ли третий заданный интервал времени. На шаге 555, если истечение третьего заданного интервала времени не указано, способ 500 может вернуться к шагу 550 и может включать в себя продолжение поддерживания активных опор двигателя в первом режиме, и может дополнительно продолжить записывать результирующий образец вибрации рамы транспортного средства.
Альтернативно, в ответ на истечение третьего заданного интервала времени на шаге 555, способ 500 может переходить к шагу 560. На шаге 560 способ 500 может включать в себя проведение диагностики активной опоры двигателя согласно таблице, изображенной на ФИГ. 6.
Перейдем к ФИГ. 6, где таблица 600 иллюстрирует потенциальные результаты процедуры тестовой диагностики активной опоры двигателя. В некоторых примерах, таблица 600 может содержать справочную таблицу и может храниться, например, в контроллере транспортного средства. Записанный образец вибрации транспортного средства во время первого заданного интервала времени, когда активные опоры двигателя работают в первом режиме, во время второго заданного интервала времени, когда активные опоры двигателя работают во втором режиме, и во время третьего заданного интервала времени, когда активные опоры двигателя работают в первом режиме, могут сравнивать с таблицей 600 для диагностики активных опор двигателя.
Указывают три потенциальных диагноза, названных результатом А, результатом В и результатом С. В частности, могут определять, связаны ли вибрации рамы транспортного средства с событиями ухудшенного сгорания. В некоторых примерах, вибрации транспортного средства могут быть связаны с событиями ухудшенного сгорания по отношению к указанным вибрациям транспортного средства, находящимся выше порогового уровня вибрации (пороговый уровень вибрации), как обсуждалось выше, и могут дополнительно содержать вибрации двигателя в течение порогового значения времени события ухудшенного сгорания. Например, величину вибрации рамы транспортного средства могут указывать посредством датчиков вибрации и/или инерционных датчиков, а также величину вибрации могут сравнивать с пороговым уровнем вибрации. Кроме того, в контроллере может храниться временная последовательность событий ухудшенного сгорания, а вибрации транспортного средства, находящиеся выше порогового уровня вибрации, и происходящие в течение порогового времени события ухудшенного сгорания, могут указывать связанными с конкретным событием ухудшенного сгорания. На основе режима работы активных опор двигателя в первый заданный интервал 530 времени, второй заданный интервал 540 времени и третий заданный интервал 550 времени, и того, связан ли образец вибрации транспортного средства с событиями ухудшенного сгорания во время первого, второго и третьего заданных интервалов времени, могут определять диагнозы того, функционируют ли активные опоры двигателя требуемым образом (например, результат А), заклинивают ли активные опоры двигателя в первом режиме, режиме демпфирования (например, результат В), или заклинивают ли активных опор двигателя во втором режиме, режиме увеличения жесткости (например, результат С).
В частности, может быть определено, что активные опоры двигателя транспортного средства функционируют требуемым образом (например, результат А) по отношению к записанному образцу вибрации, не связанному (Нет) с событиями ухудшенного сгорания в первом режиме во время первого заданного интервала времени, связанному (Да) с событиями ухудшенного сгорания во втором режиме во время второго заданного интервала времени, и не связанному (Нет) с событиями ухудшенного сгорания в первом режиме во время третьего заданного интервала времени. В качестве примера, во время первого заданного интервала времени, когда активные опоры двигателя работают в первом режиме, можно ожидать, что события ухудшенного сгорания значительно демпфируются. Таким образом, записанный образец вибрации может быть ожидаемо не связан с событиями ухудшенного сгорания. Иными словами, любые вибрации, вызываемые событиями ухудшенного сгорания, могут быть ожидаемо ниже порогового уровня вибрации. Альтернативно, в ответ на работу активных опор двигателя во втором положении во время второго заданного интервала времени, вибрации, вызываемые событиями ухудшенного сгорания, могут быть ожидаемо выше порогового уровня вибрации, таким образом, записанный образец вибрации может быть ожидаемо связан с событиями ухудшенного сгорания во время второго заданного интервала времени, когда активные опоры двигателя работают во втором положении. Кроме того, во время третьего заданного интервала времени, когда активные опоры двигателя могут возвращаться к первому, режиме демпфирования, можно также ожидать, что записанный образец вибрации может быть не связан с событиями ухудшенного сгорания.
Таким образом, если записанный образец вибрации рамы транспортного средства не связан (Нет) с событиями ухудшенного сгорания в первом режиме во время первого заданного интервала времени, связан (Да) с событиями ухудшенного сгорания во втором режиме во время второго заданного интервала времени, и не связан (Нет) с событиями ухудшенного сгорания в первом режиме во время третьего заданного интервала времени, то может быть указано, что активные опоры двигателя функционируют требуемым образом.
В другом примере, могут определять заклинивание активных опор транспортного средства в первом, режиме демпфирования (например, результат В), по отношению к записанному образцу вибрации, не связанному (Нет) с событиями ухудшенного сгорания в первом режиме во время первого заданного интервала времени, не связанному (Нет) с событиями ухудшенного сгорания во втором режиме во время второго заданного интервала времени, и не связанному (Нет) с событиями ухудшенного сгорания в первом режиме во время третьего заданного интервала времени. Как обсуждалось выше, во время первого заданного интервала времени, когда активные опоры двигателя работают в первом режиме, события ухудшенного сгорания могут ожидаемо значительно демпфироваться, что наблюдается во время первого заданного интервала времени, поскольку образец вибрации не указан (Нет) связанным с ухудшенными событиями сгорания. При переходе ко второму режиму работы во время второго заданного интервала времени, записанный образец вибрации может быть ожидаемо связан с событиями ухудшенного сгорания. Однако, для результата В, при переходе ко второму режиму работы, образец вибрации транспортного средства не указан связанным с событиями ухудшенного сгорания. Кроме того, во время третьего заданного интервала времени, когда активные опоры снова работают в первом режиме, события ухудшенного сгорания могут ожидаемо значительно демпфироваться. Таким образом, в ответ на то, что записанный образец вибрации не связан с событиями ухудшенного сгорания во время любого из первого заданного интервала времени, когда активные опоры двигателя работают в первом режиме, второго заданного интервала времени, когда активные опоры двигателя работают во втором режиме, и третьего заданного интервала времени, когда активные опоры двигателя работают в первом режиме, могут указывать заклинивание активных опор двигателя в первом, режиме демпфирования (например, результат В).
В другом примере, могут определять заклинивание активных опор двигателя транспортного средства во втором, режиме увеличения жесткости (например, результат С), в ответ на то, что записанный образец вибрации связан (Да) с событиями ухудшенного сгорания в первом режиме во время первого заданного интервала времени, связан (Да) с событиями ухудшенного сгорания во втором режиме во время второго заданного интервала времени, и, кроме того, связан (Да) с событиями ухудшенного сгорания в первом режиме во время третьего заданного интервала времени. Как обсуждалось выше, во время первого заданного интервала времени, когда активные опоры двигателя работают в первом режиме, события ухудшенного сгорания могут ожидаемо значительно демпфироваться, что нельзя наблюдать во время первого заданного интервала времени для результата С. Иными словами, пока вибрации рамы транспортного средства ожидаемо не связаны с событиями ухудшенного сгорания во время первого заданного интервала времени, вместо этого вибрации рамы транспортного средства указывают связанными (Да) с событиями ухудшенного сгорания. Кроме того, при переходе ко второму режиму работы во время второго заданного интервала времени, записанный образец вибрации может быть ожидаемо связан с событиями ухудшенного сгорания. Для результата С, записанный образец вибраций указывают связанным (Да) с событиями ухудшенного сгорания во время второго заданного интервала времени, когда активные опоры двигателя работают во втором режиме. Кроме того, при переходе к первому режиму работы во время третьего заданного интервала времени, записанный образец вибрации может ожидаемо быть не связан с событиями ухудшенного сгорания. Однако, для результата С, записанный образец вибраций указывают связанным (Да) с событиями ухудшенного сгорания во время третьего заданного интервала времени, когда активные опоры двигателя работают в первом режиме. Таким образом, в ответ на то, что записанный образец вибрации связан (Да) с событиями ухудшенного сгорания во время любого из первого заданного интервала времени, когда активные опоры двигателя работают в первом режиме, второго заданного интервала времени, когда активные опоры двигателя работают во втором режиме, и третьего заданного интервала времени, когда активные опоры двигателя работают в первом режиме, могут указывать заклинивание активных опор двигателя во втором, режиме увеличения жесткости (например, результат С).
Таким образом, возвращаясь к шагу 560 способа 500, способ может включать в себя диагностику того, функционируют ли активные опоры двигателя требуемым образом (например, результат А), заклинивают ли активные опоры двигателя в первом режиме (например, результат В), или заклинивают ли активные опоры двигателя во втором режиме (например, результат С). Как обсуждалось, могут определять образец вибрации рамы транспортного средства во время первого, второго и третьего заданных интервалов времени, и также указывать, связаны ли подобные образцы с событиям ухудшенного сгорания во время каждого из первого, второго и третьего заданных интервалов времени. Посредством сравнения результатов того, связаны ли вибрации транспортного средства с событиями ухудшенного сгорания во время первого заданного интервала времени, когда активные опоры двигателя работают в первом режиме, во время второго заданного интервала времени, когда активные опоры двигателя работают во втором режиме, и во время третьего заданного интервала времени, когда активные опоры двигателя работают в первом режиме, для диагностики того, что активные опоры двигателя функционируют требуемым образом, могут использовать таблицу 600.
Соответственно, переходя к шагу 565, способ 500 может включать в себя указание того, функционируют ли активные опоры двигателя требуемым образом, или заклинивают ли активные опоры двигателя либо в первом, режиме демпфирования, либо во втором, режиме увеличения жесткости. В ответ на указание того, что активные опоры двигателя функционируют требуемым образом, способ 500 может переходить к шагу 575 и может включать в себя обновление параметров работы транспортного средства. Обновление параметров работы транспортного средства на шаге 575 может включать в себя хранение результатов тестовой диагностики в контроллере. Например, могут указывать проведение диагностики активной опоры двигателя и то, что, в ответ на проведение диагностики активной опоры двигателя, было определено функционирование активных опор двигателя транспортного средства требуемым образом. Затем способ 500 может завершиться.
Альтернативно, на шаге 565, в ответ на указание того, что активные опоры двигателя не функционируют требуемым образом, способ 500 может переходить к шагу 570. Например, на шаге 570 способ 500 может включать в себя указание заклинивания активных опор двигателя в первом, режиме демпфирования, или заклинивание активных опор двигателя во втором, режиме увеличения жесткости. Соответственно, на шаге 570 способ 500 может включать в себя обновление параметров работы транспортного средства. Например, обновление параметров работы транспортного средства на шаге 570 может включать в себя хранение результатов тестовой диагностики в контроллере. В частности, может быть указано проведение процедуры тестовой диагностики активной опоры двигателя, и, в ответ на проведение диагностики активной опоры двигателя, могут указать заклинивание активных опор двигателя в первом режиме или втором режиме, в зависимости от результата тестовой диагностики. На шаге 570 обновление параметров работы транспортного средства может дополнительно включать в себя установку флажка в контроллере или установку диагностического кода неисправности (ДКН). Кроме того, на шаге 570 обновление параметров работы транспортного средства может включать в себя освещение лампы индикатора неисправности (ЛИН), уведомляющей оператора (если он присутствует) о необходимости сервисного обслуживания транспортного средства. В некоторых примерах, на шаге 570 обновление параметров работы транспортного средства может включать в себя ограничение максимальной частоты вращения двигателя в ответ на указание заклинивания активных опор двигателя во втором, режиме увеличения жесткости.
Перейдем к ФИГ. 7, где показан пример временной шкалы 700 для проведения процедуры тестовой диагностики активной опоры двигателя согласно способу 500, изображенному в настоящем документе, и со ссылкой на ФИГ. 5, а также в соответствии с системами, раскрытыми в настоящем документе, и со ссылкой на ФИГ. 1-4. Временная шкала 700 включает в себя график 705, указывающий работает ли (да) двигатель (например, двигателя 10) транспортного средства или нет (нет) с течением времени. Например, работающий двигатель может включать в себя двигатель, сжигающий топливо и воздух. Временная шкала 700 включает в себя график 710, указывающий скорость транспортного средства с течением времени. Транспортное средство может быть остановлено или может перемещаться при различных скоростях (+), больших, чем при остановке. Временная шкала 700 дополнительно включает в себя график 715, указывающий, соблюдены ли условия теста опоры двигателя, с течением времени. Условия могут быть либо соблюдены (да), либо не соблюдены (нет). Временная шкала 700 дополнительно включает в себя график 720, указывающий, работают ли активные опоры двигателя в первом, режиме демпфирования, или во втором, режиме увеличения жесткости, с течением времени. Временная шкала 700 дополнительно включает в себя график 725, указывающий поддерживают ли подачу топлива в предварительно выбранный цилиндр (вкл), или прекращают подачу (выкл), с течением времени. Временная шкала 700 дополнительно включает в себя график 730, указывающий, указаны ли события ухудшенного сгорания (да), или нет (нет), с течением времени. Временная шкала 700 дополнительно включает в себя график 735, указывающий вибрации рамы транспортного средства, записанные посредством датчиков вибрации (например, датчиков 141), и/или инерционных датчиков (например, датчиков 199), с течением времени. Линия 736 представляет собой пороговый уровень вибрации, превышение которого может означать то, что вибрации рамы транспортного средства связаны с событиями ухудшенного сгорания. Временная шкала 700 дополнительно включает в себя график 740, указывающий, функционируют ли (да) активные опоры двигателя требуемым образом, или нет (нет), с течением времени.
В момент времени t0, двигатель указывают работающим как показано на графике 705, и, таким образом, он считается сжигающим воздух и топливо. Графиком 710 указано, что транспортное средство перемещается со скоростью выше скорости остановки. Однако, графиком 715 указано несоблюдение условий для проведения процедуры тестовой диагностики активной опоры двигателя. Как обсуждалось выше, соблюдение условий может включать в себя режим холостого хода двигателя, где двигатель запущен, но транспортное средство не передвигается, условие статичности, заданный интервал времени, прошедший с момента прошедшей диагностики активной опоры двигателя, и т.д. Поскольку соблюдение условий для тестовой диагностики активной опоры двигателя не указано, графиком 725 указывается поддерживание подачи топлива в предварительно выбранный цилиндр. Соответственно, график 710 указывает отсутствие событий ухудшенного сгорания. Кроме того, график 720 указывает работу активных опор двигателя в первом, режиме демпфирования. Таким образом, график 735 показывает указание датчиками вибрации (и/или инерционными датчиками) низкого уровня вибрации от рамы транспортного средства. Кроме того, в момент времени t0 указывают функционирование активных опор двигателя требуемым образом. Хотя, на самом деле, опоры двигателя могут не функционировать требуемым образом, как будет более подробно раскрыто ниже, в момент времени t0 указывают, что опоры двигателя функционируют требуемым образом. Например, тестовую диагностику активной опоры двигателя могли не проводить с момента прошлой тестовой диагностики опоры двигателя, где было указано функционирование активных опор двигателя требуемым образом. Таким образом, в момент времени t0 указывают функционирование активных опор двигателя требуемым образом.
Между моментами времени t0 и t1, транспортное средство замедляют и останавливают, поддерживая двигатель запущенным. Кроме того, в момент времени t1 указывают соблюдение условия для проведения процедуры тестовой диагностики активной опоры двигателя. Хотя четкое изображение отсутствует, следует понимать, что в ответ на соблюдение условий для тестовой диагностики активной опоры двигателя, педаль тормоза (например, педаль 156) могут поддерживать нажатой, или могут дать команду колесным тормозам перейти в активированное состояние посредством контроллера, причем сила торможения к одному или более колесам может быть увеличена. Кроме того, трансмиссию (например, трансмиссию 137) транспортного средства могут поддерживать в режиме движения или дать команду на ее перевод в режим движения посредством контроллера. Соответственно, в момент времени t1 отключают подачу топлива к предварительно выбранному цилиндру двигателя. В частности, контроллер может посылать команду топливному инжектору на отключение подачи топлива к предварительно выбранному цилиндру (например, инжектору 66), выполненному с возможности подачи топлива к предварительно выбранному цилиндру. Возбуждение событий ухудшенного сгорания может быть достигнуто посредством отключения подачи топлива к предварительно выбранному цилиндру.
Таким образом, между моментами времени t2 и t3, записывают вибрации рамы транспортного средства, например, образец вибрации рамы транспортного средства, когда активные опоры двигателя работают в первом, режиме демпфирования. Как показано, между моментами времени t2 и t3 указывают три события ухудшенного сгорания, однако, этот пример является иллюстративным, и поэтому между моментами времени t2 и t3 могут происходить больше, чем три события ухудшенного сгорания. Следует понимать, что, как обсуждалось выше, интервал времени между моментами времени t2 и t3 может содержать первый заданный интервал времени.
В момент времени t3 активные опоры двигателя переключают из первого режима во второй, режим увеличения жесткости. Между моментами времени t3 и t4, когда активные опоры двигателя работают во втором режиме, контроллером транспортного средства записывается образец вибрации рамы транспортного средства. Аналогично раскрытому выше, между моментами времени t3 и t4 указаны три события ухудшенного сгорания, однако, между моментами времени t3 и t4 могут происходить больше, чем три события ухудшенного сгорания. Следует понимать, что, как обсуждалось выше, интервал времени между моментами времени t3 и t4 может содержать второй заданный интервал времени.
В момент времени t4 активные опоры двигателя переключают из второго режима обратно в первый режим. Между моментами времени t3 и t4, когда активные опоры двигателя работают во втором режиме, контроллером транспортного средства записывается образец вибрации рамы транспортного средства. Аналогично раскрытому выше, между моментами времени t4 и t5 указаны три события ухудшенного сгорания, однако, между моментами времени t4 и t5 могут происходить больше, чем три события ухудшенного сгорания. Следует понимать, что, как обсуждалось выше, интервал времени между моментами времени t4 и t5 может содержать третий заданный интервал времени.
Между моментами времени t2 и t5, график 740 указан пунктирной линией для иллюстрации проходящей процедуры тестовой диагностики активной опоры двигателя, и, таким образом, во время интервала времени между моментами времени t2 и t5 неизвестно, функционируют ли активные опоры двигателя требуемым образом.
В момент времени t5 процедура тестовой диагностики активной опоры двигателя завершается. Иными словами, вибрации транспортного средства записывали во время первого заданного интервала времени, когда активные опоры двигателя работают в первом режиме, во время второго заданного интервала времени, когда активные опоры двигателя работают во втором режиме, и во время третьего заданного интервала времени, когда активные опоры двигателя работают в первом режиме. Соответственно, контроллер транспортного средства может запрашивать справочную таблицу для того, чтобы определить, функционируют ли активные опоры двигателя требуемым образом. Как обсуждалось выше, подобная справочная таблица может содержать справочную таблицу 600, изображенную на ФИГ. 6. Для определения того, связаны ли события ухудшенного сгорания с записанными данными от датчиков вибрации, контроллер транспортного средства может обрабатывать данные, соответствующие событиям ухудшенного сгорания, и данные, записанные посредством датчиков вибрации (и/или инерционных датчиков). На примере временной шкалы 700, данные, записанные датчиками вибрации, соответствующие событиям ухудшенного сгорания, находятся выше порогового уровня вибрации в первом заданном интервале времени, втором заданном интервале времени и третьем заданном интервале времени. Таким образом, следует понимать, что при работе активных опор двигателя в первом режиме во время первого заданного интервала времени и во время третьего заданного интервала времени, события ухудшенного сгорания демпфируются не эффективно. Вместо этого, записанные вибрации в первый заданный интервал времени, второй заданный интервал времени и третий заданный интервал времени указывают связанными с событиями ухудшенного сгорания. Поэтому, результаты тестовой диагностики активной опоры двигателя соответствуют результату С, раскрытому выше в отношении ФИГ. 6. В частности, могут определять заклинивание активных опор двигателя во втором режиме (например, режиме увеличения жесткости). Хотя пример временной шкалы изображает условие, где активные опоры двигателя заклинены во втором режиме, другие примеры результатов, такие, как результаты А или В, раскрытые выше в отношении ФИГ. 6, могут быть указаны при условиях, при которых указано функционирование активных опор двигателя требуемым образом (например, результат А), или в ответ на указание заклинивания активных опор двигателя в первом режиме (например, результат В).
Соответственно, в момент времени t5 график 740 указывает, что активные опоры двигателя не функционируют требуемым образом. В ответ на указание того, что активные опоры двигателя не функционируют требуемым образом, контроллер может устанавливать флажок и запускать освещение лампы индикатора неисправности (ЛИН) для уведомления оператора транспортного средства (если присутствует) о необходимости сервисного обслуживания транспортного средства. Кроме того, поскольку тестовая диагностика активной опоры двигателя с первого по третий заданные интервалы времени указана завершенной, график 715 больше не показывает соблюдение условий проведения тестовой диагностики активной опоры двигателя. Поскольку условия для проведения тестовой диагностики активной опоры двигателя больше не соблюдены, подачу топлива к предварительно выбранному цилиндру возобновляют. Например, контроллер может дать команду топливному инжектору, выполненному с возможностью подачи топлива к предварительно выбранному цилиндру, возобновить подачу топлива. Между моментами времени t5 и t6 график 710 указывает возобновление передвижения транспортного средства.
Таким образом, процедуру тестовой диагностики активной опоры двигателя транспортного средства могут производить во время остановки на холостом ходу. В некоторых примерах для диагностики того, функционируют ли активные опоры двигателя требуемым образом, тест могут производить на автономно управляемом транспортном средстве, даже при условиях, когда оператор транспортного средства и другие пассажиры могут отсутствовать. Однако, такой пример не должен быть ограничивающим, и тестовую диагностику активной опоры двигателя могут дополнительно или альтернативно производить на транспортных средствах, не предназначенных для автономного управления, на таких, как обычные бензиновые (или использующие другие виды топлива) транспортные средства, гибридные электромобили, гибридные электромобили с подзарядкой, и т.д.
Технический результат заключается в том, что для транспортных средств с активно управляемыми опорами двигателя при статичных условиях, например, условиях холостого хода двигателя, вибрации двигателя могут возбуждаться посредством отключения подачи топлива в предварительно выбранный цилиндр двигателя. При возбуждение вибраций посредством отключения подачи топлива в предварительно выбранный цилиндр, вибрации шасси транспортного средства могут отслеживать при условиях, при которых возбуждаемые вибрации ожидаемо будут демпфироваться, и при условиях, при которых возбуждаемые вибрации ожидаемо не будут демпфироваться. Посредством отслеживания того, демпфированы ли возбуждаемые вибрации, или нет, при управлении активными опорами двигателя в обоих режимах демпфирования и увеличения жесткости, может быть определено, функционируют ли активные опоры двигателя требуемым образом, заклинивают ли в режиме демпфирования или заклинивают ли в режиме увеличения жесткости. Посредством периодического определения того, функционируют ли активные опоры двигателя требуемым образом, могут уменьшать сложности, возникающие в системе транспортного средства из-за нефункционирования активных опор двигателя требуемым образом.
В одном примере, способ может включать в себя, в ответ на вибрацию шасси во время каждого из режимов, указание изнашивания активной опоры двигателя посредством возбуждения событий ухудшенного сгорания в предварительно выбранном цилиндре двигателя и работы активной опоры двигателя во множестве режимов.
Системы, раскрытые в настоящем документе и со ссылкой на ФИГ. 1-4, а также способы, раскрытые в настоящем документе и со ссылкой на ФИГ. 5, могут обеспечивать одну или несколько систем и один или несколько способов. В одном примере, способ содержит шаги, на которых во время приведения в движение транспортного средства по меньшей мере частично посредством двигателя, изолируют вибрацию двигателя от кабины и шасси транспортного средства посредством одной или более активных опор двигателя, управляемых в первом и втором режимах; и при первом условии, увеличивают вибрации двигателя и управляют активными опорами двигателя в первом и втором режимах для диагностики того, функционируют ли активные опоры двигателя требуемым образом. В первом примере способа, в способе дополнительно подают топливо к одному или более цилиндрам двигателя посредством управления одним или более топливными инжекторами во время приведения в движение транспортного средства по меньшей мере частично посредством двигателя; и причем возбуждение вибраций двигателя включает в себя отключение подачи топлива к предварительно выбранному цилиндру двигателя для возбуждения ухудшенного сгорания в предварительно выбранном цилиндре двигателя. Второй пример способа опционально включает в себя первый пример, и дополнительно включает в себя то, что увеличение вибраций двигателя и управление активными опорами двигателя при первом условии осуществляют в ответ на соблюдение предварительных условий, причем предварительные условия включают в себя одно или более из следующего: указание условия холостого хода двигателя и интервал времени, прошедший с момента предыдущей диагностики активной опоры двигателя. Третий пример способа опционально включает в себя любой один или более, либо все с первого по второй примеры, и в нем дополнительно при первом условии, подают команду использовать или поддерживают использование одного или более колесных тормозов, и подают команду трансмиссии транспортного средства перейти в режим движения или поддерживают работу трансмиссии транспортного средства в режиме движения.
Четвертый пример способа опционально включает в себя любой один или более, либо все с первого по третий примеры, и в нем дополнительно первый режим включает в себя режим демпфирования работы активной опоры двигателя, и причем второй режим включает в себя режим увеличения жесткости работы активной опоры двигателя. Пятый пример способа опционально включает в себя любой один или более, либо все с первого по четвертый примеры, и в нем дополнительно управление активными опорами двигателя в первом и втором режимах включает в себя перевод активных опор двигателя в первый режим на первый заданный интервал времени; перевод активных опор двигателя во второй режим на второй заданный интервал времени после завершения первого заданного интервала времени; и перевод активных опор двигателя в первый режим на третий заданный интервал времени после завершения второго заданного интервала времени. Шестой пример способа опционально включает в себя любой один или более, либо все с первого по пятый примеры, и в нем первое условие дополнительно содержит: отслеживание увеличенных вибраций посредством одного или более датчиков вибрации, выполненных с возможностью обнаружения вибраций, исходящих от кабины транспортного средства и шасси транспортного средства вследствие увеличения вибраций двигателя. Седьмой пример способа опционально включает в себя любой один или более, либо все с первого по шестой примеры, и в нем дополнительно определяют, связаны ли вибрации, исходящие от кабины и шасси транспортного средства и отслеживаемые посредством одного или более датчиков вибрации, с увеличенными вибрациями во время управления активными опорами двигателя в первом режиме и втором режиме, во время первого условия; указывают функционирование активных опор двигателя требуемым образом, если отслеживаемые вибрации не связаны с увеличенными вибрациями в первом режиме, но при этом отслеживаемые вибрации связаны с увеличенными вибрациями во втором режиме; указывают заклинивание активных опор двигателя в первом режиме, если отслеживаемые вибрации не связаны с увеличенными вибрациями в первом режиме, и при этом отслеживаемые вибрации не связаны с увеличенными вибрациями во втором режиме; и указывают заклинивание активных опор двигателя во втором режиме, если отслеживаемые вибрации связаны с увеличенными вибрациями в первом режиме, и при этом отслеживаемые вибрации также связаны с увеличенными вибрациями во втором режиме. Восьмой пример способа опционально включает в себя любой один или более, либо все с первого по седьмой примеры, и в нем определение того, связаны ли вибрации, исходящие от кабины и шасси транспортного средства и отслеживаемые посредством одного или более датчиков вибрации, с увеличенными вибрациями, дополнительно включает в себя: указание того, что вибрации, отслеживаемые посредством одного или более датчиков вибрации, связаны с увеличенными вибрациями в ответ на то, что отслеживаемые вибрации выше порогового уровня вибрации в пределах порогового интервала времени увеличенных вибраций.
Пример системы содержит: двигатель с одним или более цилиндрами двигателя; 5 одну или более активных опор двигателя, выполненных с возможностью изолирования вибраций двигателя от шасси транспортного средства и кабины транспортного средства и с возможностью управления в первом режиме демпфирования и втором режиме увеличения жесткости; один или более датчиков вибрации, выполненных с возможностью отслеживания вибрации шасси и кабины транспортного средства; и контроллер, содержащий сохраненные в долговременной памяти инструкции, которые при исполнении приводят к тому, что контроллер может: в ответ на указание того, что соблюдены предварительные условия для тестовой процедуры диагностики активной опоры двигателя: активно возбуждать события ухудшенного сгорания в предварительно выбранном цилиндре двигателя; переводить одну или более активных опор двигателя в режим демпфирования на первый заданный интервал времени, переводить одну или более активных опор двигателя в режим увеличения жесткости на второй заданный интервал времени, и переводить одну или более активных опор двигателя в режим демпфирования на третий заданный интервал времени, пока в предварительно выбранном цилиндре двигателя происходят события ухудшенного сгорания; отслеживать вибрации посредством одного или более датчиков вибрации во время первого заданного интервала времени, во время второго заданного интервала времени и во время третьего заданного интервала времени; и указывать функционирование активных опор двигателя требуемым образом в ответ на то, что вибрации, отслеживаемые посредством одного или более датчиков вибрации, демпфируются ниже порогового значения вибраций во время первого заданного интервала времени и третьего заданного интервала времени, а не во время второго заданного интервала времени. В первом примере, в системе контроллер дополнительно содержит сохраненные в долговременной памяти инструкции, которые при исполнении приводят к тому, что контроллер может: указывать заклинивание активных опор двигателя в первом режиме демпфирования, в ответ на то, что вибрации, отслеживаемые посредством одного или более датчиков вибрации, демпфируются ниже порогового значения вибрации во время каждого из первого, второго и третьего заданных интервалов времени; и указывать заклинивание активных опор двигателя во втором режиме увеличения жесткости в ответ на то, что вибрации, отслеживаемые посредством одного или более датчиков вибрации, выше порогового значения вибрации во время каждого из первого, второго и третьего заданных интервалов времени. Второй пример системы опционально включает в себя первый пример и дополнительно содержит один или более топливных инжекторов, выполненных с возможностью подачи топлива к одному или более цилиндрам двигателя; и причем контроллер дополнительно содержит сохраненные в долговременной памяти инструкции, которые при исполнении приводят к тому, что контроллер может: дать команду топливному инжектору, выполненному с возможностью подачи топлива в предварительно выбранный цилиндр, прекратить впрыск топлива для активного возбуждения событий ухудшенного сгорания в предварительно выбранном цилиндре двигателя. Третий пример системы опционально включает в себя любой один или более, или все с первого по второй примеры, и в нем соблюдение предварительных условий для осуществления тестовой процедуры диагностики активной опоры двигателя включает в себя одно или более из следующего: условие холостого хода двигателя и интервал времени, прошедший с момента предыдущей диагностики активной опоры двигателя. Четвертый пример системы опционально включает в себя любой один или более, или все с первого по третий примеры, и дополнительно содержит антиблокировочную тормозную систему для увеличения или уменьшения гидравлического давления, прикладываемого к одному или более колесным тормозам; трансмиссию; и причем контроллер дополнительно содержит сохраненные в долговременной памяти инструкции, которые при исполнении приводят к тому, что контроллер может: в ответ на указание того, что предварительные условия для тестовой процедуры диагностики активной опоры двигателя соблюдены: дать команду использовать или поддерживать использование колесных тормозов; и дать команду трансмиссии перейти в режим движения.
Другой пример способа содержит шаги, на которых во время приведения в движение автономного транспортного средства по меньшей мере частично посредством двигателя, изолируют вибрацию двигателя от кабины и шасси транспортного средства посредством одной или более активных опор двигателя, управляемых по меньшей мере в режиме демпфирования и в режиме увеличения жесткости; и в ответ на соблюдение заданных условий для тестовой процедуры диагностики активной опоры двигателя: активно возбуждают множество событий ухудшенного сгорания для увеличения вибрации двигателя; управляют активными опорами двигателя в режиме демпфирования, далее в режиме увеличения жесткости, и затем возвращают активные опоры двигателя в режим демпфирования, пока происходят события ухудшенного сгорания; и указывают, функционируют ли активные опоры двигателя требуемым образом, заклинивают ли они в режиме демпфирования или заклинивают ли они в режиме увеличения жесткости. В первом примере способа, в способе дополнительно отслеживают вибрацию шасси и кабины посредством одного или более датчиков вибрации, пока опорами двигателя управляют в режимах демпфирования и увеличения жесткости, и причем отслеживаемые вибрации включают в себя вибрации, обусловленные событиями ухудшенного сгорания; и указывают функционирование активных опор двигателя требуемым образом в ответ на то, что отслеживаемые вибрации демпфируют ниже порогового значения вибрации во время каждого из режимов демпфирования, но при этом отслеживаемые вибрации выше порогового значения вибрации во время режима увеличения жесткости. Второй пример способа опционально включает в себя первый пример и в нем дополнительно указывают заклинивание активных опор двигателя в режиме демпфирования в ответ на то, что отслеживаемые вибрации демпфируют ниже порогового значения вибрации во время каждого из режимов демпфирования и режима увеличения жесткости; и указывают заклинивание активных опор двигателя в режиме увеличения жесткости в ответ на то, что отслеживаемые вибрации выше порогового значения вибрации в каждом из режимов демпфирования или в режиме увеличения жесткости. Третий пример способа опционально включает в себя любой один или более, либо все с первого по второй пример, и в нем дополнительно подают команду использовать или поддерживать использование одного или более колесных тормозов, и подают команду трансмиссии транспортного средства перейти в режим движения или поддерживают работу трансмиссии транспортного средства в режиме движения в ответ на соблюдение заданных условий для тестовой процедуры диагностики активной опоры двигателя. Четвертый пример способа опционально включает в себя любой один или более, либо все с первого по третий примеры, и в нем заданные условия включают в себя одно или более из следующего: указание условия холостого хода двигателя и интервал времени, прошедший с момента предыдущей диагностики активной опоры двигателя. Пятый пример способа опционально включает в себя любой один или более, или все с первого по четвертый примеры, и в нем дополнительно подают топливо к одному или более цилиндрам двигателя посредством одного или более топливных инжекторов, выполненных с возможностью подачи топлива к одному или более цилиндрам двигателя; и причем активное возбуждение множества событий ухудшенного сгорания для возбуждения вибрации двигателя включает в себя прекращение подачи топлива к предварительно выбранному цилиндру.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и могут исполняться системой управления, включающей в себя контроллер в комбинации с различными датчиками, приводами и другим оборудованием двигателя. Раскрытые в настоящем документе алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. В этом случае проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же порядок обработки необязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь примеров вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или более из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически представлять запрограммированный в долговременную память машиночитаемого хранилища информации в системе управления двигателем код, где раскрытые действия могут исполняться выполнением инструкций в системе, включающей в себя различные компоненты двигателя в комбинации с электронным контроллером.
Следует отметить, что конкретные конфигурации и алгоритмы, раскрытые в настоящем документе, являются примерами и конкретные варианты осуществления не несут ограничительной функции, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные сочетания и производные сочетания различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, внимание сосредоточено на определенных сочетаниях компонентов и производных сочетаниях компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты включают в себя один или более указанных элементов, не требуя, и не исключая двух или более таких элементов. Иные сочетания и производные сочетания раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем поправки имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи исходной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
Реферат
Изобретение относится к транспортным средствам. В способе диагностики опоры двигателя транспортного средства, во время приведения в движение транспортного средства посредством двигателя, изолируют вибрацию двигателя от кабины и шасси транспортного средства посредством одной или более активных опор двигателя, управляемых посредством контроллера в первом режиме демпфирования и втором режиме увеличения жесткости. Затем проводят диагностику опоры двигателя посредством увеличения вибраций двигателя и управления активными опорами двигателя посредством контроллера в первом режиме и втором режиме для диагностики того, функционируют ли активные опоры двигателя требуемым образом. Реализуется самодиагностика опор. 3 н. и 14 з.п. ф-лы, 7 ил.
Комментарии