Прогнозирующее техническое обслуживание роликовых подшипников - RU2534562C2
Код документа: RU2534562C2
Чертежи











Описание
Настоящее изобретение относится, в общем, к прогнозирующему техническому обслуживанию роликовых подшипникови, в частности к ориентированному на техническое обслуживание мониторингу на основе состояния роликовых подшипников в сервомоторах, работающих на произвольно переменной низкой скорости и с (циклическими) реверсированиями движения, к примеру в сервомоторах, используемых в разливочных машинах или распределительном оборудовании упаковочных линий, выполненных с возможностью формировать запечатанные упаковки, содержащие продукты питания.
Уровень техники
Как известно, в заводском цехе предприятия по упаковке пищевых продуктов, в общем, выполняются несколько специализированных процессов, в том числе хранение поступающих пищевых продуктов и упаковочных материалов, технологическая обработка пищевых продуктов, упаковка пищевых продуктов и складирование упаковок. С конкретной ссылкой на текучие продукты питания, упаковка пищевых продуктов выполняется на упаковочных линиях, каждая из которых является комплектом машин и оборудования для производства и обработки упаковок и включает в себя разливочную машину для производства запечатанных упаковок, после чего следует одна или более заданных конфигураций расположенного далее распределительного оборудования, к примеру, сборников, соломенных аппликаторов, машин для обертывания в пленку и картонных упаковщиков, соединенных с разливочной машиной через конвейеры, для обработки упаковок.
Типичным примером этого типа упаковок является упаковка в форме параллелепипеда для жидких или текучих продуктов питания, известная как Tetra Brik Aseptic®, которая изготавливается посредством фальцовки и герметизации ламинированного рулона упаковочного материала.
Упаковочный материал имеет многослойную листовую структуру, фактически содержащую один или более усиливающих и укрепляющих базовых слоев, типично изготовленных из волокнистого материала, например бумажного или заполненного минералами полипропиленового материала, покрытого с обеих сторон определенным числом слоев из термоплавкой пластмассы, например из полиэтиленовой пленки. В случае асептических упаковок для продуктов длительного хранения, к примеру, пастеризованного молока, упаковочный материал также содержит слой из материала для газовой и световой защиты, например из алюминиевой фольги или пленки из этилен-винилового спирта (EVOH), которая накладывается на слои из термоплавкой пластмассы и, в свою очередь, покрывается другим слоем из термоплавкой пластмассы, формирующим внутреннюю поверхность упаковки, в конечном счете контактирующую с продуктом питания.
Упаковки этого типа формируются на полностью автоматических разливочных машинах, в которых непрерывная вертикальная трубка формируется из рулонного упаковочного материала, который стерилизуется посредством применения химического стерилизующего средства, такого как раствор перекиси водорода, который, как только стерилизация завершена, удаляется, например выпаривается посредством нагрева с поверхностей упаковочного материала; и стерилизованный рулон хранится в закрытой стерилизованной окружающей среде и фальцуется и герметизируется продольно, чтобы формировать вертикальную трубку. Трубка затем заполняется стерилизованным или подвергнутым стерилизации текучим продуктом питания и подается по вертикальному тракту в станцию обработки давлением, в которой она захватывается вдоль равномерно распределенных поперечных сечений посредством системы зажимных кулачков, включающей в себя две или более пары зажимных кулачков, которые действуют циклически и последовательно на трубку и герметизируют упаковочный материал трубки, чтобы формировать непрерывную ленту из пакетов в виде подушек, соединенных между собой посредством поперечных уплотнительных лент. Подкладочные пакеты отделяются друг от друга посредством отрезания связанных друг с другом уплотнительных лент и транспортируются на конечную фальцовочную станцию, на которой они механически фальцуются в готовые упаковки, например, практически в форме параллелепипеда.
Альтернативно, упаковочный материал может разрезаться на заготовки, которые формируются в упаковки на формовочных шпинделях, и упаковки заполняются продуктами питания и герметизируются. Одним примером этого типа упаковки является так называемая упаковка "с крышеобразным верхом", известная как Tetra Rex®.
В этих упаковочных линиях несколько компонентов управляются посредством (электрических) сервомоторов, на которые, хотя они и являются ценными в некоторых отношениях, оказывают негативное влияние выходы из строя, одной из главных причин которых является поломка роликовых подшипников, поддерживающих вал сервомоторов, вследствие усталости или износа. Хотя усталость может быть статистически отличена стандартным способом, который приводит к так называемому LW-рейтингу подшипников, износ является менее очевидным явлением, известным в литературе как точечная коррозия или бринеллирование, которое создает локализованные повреждения, начало которых может возникать (псевдо)произвольно в ходе предполагаемого срока службы компонента, после чего следует относительно быстрая фаза ухудшения свойств, которая приводит к полной поломке. Как результат, периодическая замена этих компонентов является стратегией, которая может быть успешной только для того, чтобы предотвращать связанные с усталостью повреждения, при этом она является практически бесполезной для связанных с износом повреждений.
Другие виды профилактических операций периодического технического обслуживания и ремонта, такие как чистка и смазка, могут быть эффективными для уменьшения износа подшипников, поскольку обычно износ отличается посредством загрязнения смазочного материала подшипника, что, в свою очередь, ухудшает работоспособность подшипников. Такое загрязнение может поступать извне (например, подшипник помещен в агрессивную среду), но также может быть обусловлено внутренними причинами (например, вследствие небольших пластов материала, которые вращающиеся элементы теряют в ходе работы).
В конечном счете, тем не менее, единственным способом предотвращать связанную с износом поломку является мониторинг на основе состояния работоспособного состояния подшипников; такая стратегия техобслуживания главным образом возможна благодаря тому факту, что как только подшипник близок к повреждению, он становится шумным и вибрирует в качестве предупредительного признака наступающей поломки: если этот признак определяется своевременно, он дает оператору некоторое время, которое типично колеблется от нескольких дней до нескольких недель (в зависимости от подшипника и варианта применения), чтобы планировать операцию по техобслуживанию и заменять подшипник без влияния на производственный цикл.
Можно принимать во внимание, что анализ вибраций является важной частью промышленных программ прогнозирующего технического обслуживания, так что износ и повреждения роликовых подшипников могут обнаруживаться и исправляться до того, как машина ломается, тем самым уменьшая эксплуатационные затраты и затраты на техническое обслуживание.
Эмпирическая оценка вибрационного уровня подшипника является подверженной ошибкам операцией, которая может приводить к значительной недооценке или переоценке оставшегося срока службы компонента, а также может ошибочно принимать за повреждение подшипников шум, который обусловлен абсолютно другой причиной (например, разбалансировкой вала). По этой причине, научное сообщество нацелено на то, чтобы предоставлять научное определение характеристик дефектов подшипников, и в настоящее время множество печатных материалов может быть найдено на этой теме.
Основная идея заключается в ассоциировании каждого режима повреждения подшипника с сигнатурой характеристической частоты, которая может извлекаться из сигнала вибрации через соответствующий анализ. В частности, традиционный анализ основан на том факте, что если возникает локализованное повреждение на одной из поверхностей подшипников, то оно приводит к последовательности ударных воздействий во время вращения подшипников; кроме того, такие ударные воздействия являются периодическими при условии, что сервомотор вращается на постоянной скорости. Фактически, кинематический анализ подшипника показывает, что при условии отсутствия скольжения компонент является во многом аналогичным планетарной передаче; другими словами, существует фиксированное "передаточное число" между валом сервомотора и всеми остальными движущимися частями подшипника, и это приводит к основному уравнению анализа вибраций:


- которое показывает то, что fd, частота повреждений (которая фактически является частотой таких ударных воздействий), зависит линейно от частоты fr вращения посредством коэффициента kd повреждений, который является ничем иным, как передаточным числом между валом сервомотора и движущейся частью, в которой находится повреждение. Такие коэффициенты известны в литературе и представляются посредством следующего:
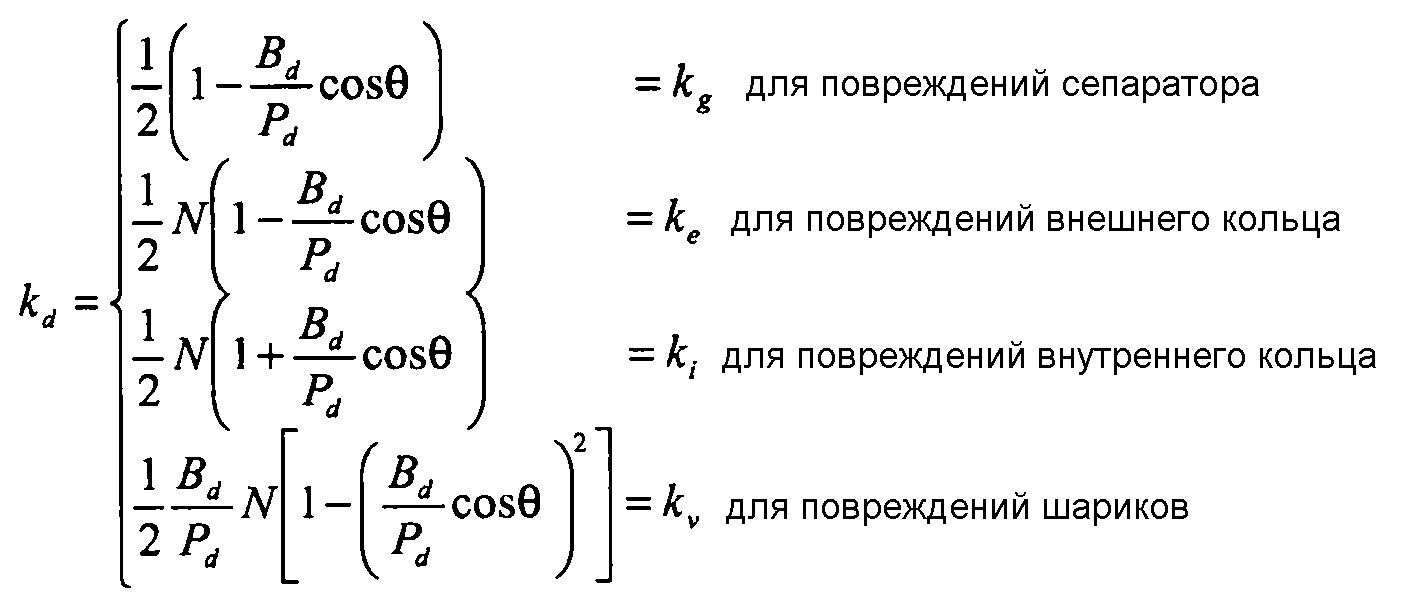
- где Bd, Pd являются диаметром шарика и начальной окружности, N является числом вращающихся элементов, θ является углом, который указывает возможное неточное совмещение между внутренними и внешними кольцами (или кольцами) как результат операций монтажа (типичные значения - между 0 и 10 градусов), при этом нижний индекс d относится, в общем, к частотам повреждений, в то время как нижние индексы g, e, i и v относятся к конкретным типам повреждения, а именно во внутренних и внешних кольцах, в шариках, разнесенных равномерно под углом между внутренними и внешними кольцами, и в сепараторе, который удерживает шарики и который вращается совместно, т.е. с идентичной скоростью, с шариками.
Последствия этого явления на спектр сигнала вибрации могут быть понятными с использованием основных свойств преобразований Фурье: если одно ударное воздействие рассматривается, во временной области оно может представляться как внешнее принудительное воздействие d(t) импульсного характера и конечной длительности T, которое стремится к идеальной импульсной функции Дирака δ(t) как T→0; аналогично, спектр D(f) упомянутого сигнала должен отличаться посредством полосы пропускания, которая должна стремиться к бесконечности по мере того, как d(t) приближается к случаю идеального импульса (преобразование Фурье которого является постоянным по всем частотам).
В ходе фактической работы компонента внешнее принудительное воздействие u(t) является периодическим повторением на частоте повреждений исходного импульса d(t):

На основе свойств преобразования Фурье периодическое повторение во времени равно дискретизации по частоте, что означает то, что спектр U(f) внешнего принудительного воздействия, которое локализованное повреждение применяет к подшипнику, является дискретным спектром, полученным посредством дискретизации спектра исходных импульсов D(f):

На практике это означает, что частотная сигнатура повреждения в сигнале вибрации является последовательностью пиков, отделенных посредством характерной частоты повреждений поврежденной части подшипника.
В общем, тем не менее, спектр сигнала вибрации, обнаруживаемого в подшипнике, не воспроизводит точно U(f); вместо этого он может представляться следующим образом:

- где G(f) является передаточной функцией механического узла, H(f) является функцией чувствительности датчика (обычно акселерометра), а N(f) является любым видом шума, накладываемого на сигнал дефекта. Спектр Y(f) как таковой, следовательно, может не являться оптимальным сигналом для анализа, чтобы идентифицировать сигнатуру повреждения; обычная процедура, чтобы получать сигнал с лучшим отношением "сигнал-шум", называется анализом огибающей и основана на следующих допущениях: существует полоса частот [f1, f2] такая, что:
-|G(f)|>>1, т.е. мы находимся около механического резонанса
-|H(f)|>>1, т.е. мы находимся в рабочем диапазоне датчика
-|N(f)|<<1, что означает на практике, что мы должны искать высшие гармоники сигнала U(f).
Последняя формулировка обусловлена тем фактом, что обычно механические шумы являются более высокими на низких частотах. Существуют некоторые исключения в это правило, например, шум вследствие зубчатой передачи, присоединенной к электромотору, и в этом случае необходимо прибегать к усовершенствованным известным технологиям фильтрации. Если вышеуказанные гипотезы удовлетворяются, посредством полосовой фильтрации в полосе частот [f1, f2] и демодуляции Y(f) можно получать сигнал, в котором некоторые пики являются четко видимыми и разнесены на fd.
Обобщая, классический анализ вибраций основан на следующих гипотезах:
- в подшипнике существует локализованное повреждение;
- электромотор, к которому присоединен подшипник, вращается на постоянной скорости;
- отсутствует скольжение во время относительного движения элементов подшипников;
- во время работы электромотора повреждение приводит к последовательным кратковременным ударным воздействиям, которые формируют последовательность пиков в частотном спектре сигнала вибрации с определенной периодичностью; и
- существует полоса частот, в которой отношение "сигнал-шум" является таким, что последовательность импульсов является обнаружимой.
Если эти условия не подтверждаются, последовательность пиков может размываться так, что она более не является распознаваемой или может быть скрыта среди других видов шума. Кроме того, тот факт, что угол θ в (2) фактически невозможно измерять в практических ситуациях, добавляет определенную сложность в задачу, поскольку каждое fd фактически является переменным в диапазоне допустимых θ. Большая часть исследований в области исторически ориентирована на технологии обработки сигналов, чтобы получать лучшие отношения "сигнал-шум" или охватывать размывание пиков вследствие небольших колебаний скорости или наличия скольжения.
Несмотря на то что базовое допущение постоянной скорости вращения сервомоторов по-прежнему является справедливым во многих вариантах применения, на практике оно является существенным ограничением в области автоматических машин, в которых обычно определенное число сервомоторов используется в качестве электрических кулачков и работает на переменной скорости, чтобы получать профили переменной скорости приводимых элементов. В частности, поскольку сервомоторы, обычно бесщеточные электромоторы переменного тока, все чаще применяются в новейших конструкциях машин благодаря тому, что их производительность намного превышает производительность механических решений для движения машин по времени, требуемому для того, чтобы повторно конфигурировать профиль движения, в этих вариантах применениях прогнозы дефектов роликового подшипника на основе частотной сигнатуры, определенной через вышеописанный классический анализ вибраций, на практике оказываются неудовлетворительными.
Чтобы расширять вышеописанный классический анализ вибраций на основе допущения постоянной скорости вращения так, чтобы охватывать варианты применения, в которых скорость вращения сервомоторов варьируется во времени, предложен так называемый анализ вибраций на основе отслеживания по порядкам (OT), который является частотным анализом, который использует кратные числа, обычно называемые порядками, скорости вращения вместо абсолютных частот (Гц) в качестве частотной базы и является полезным для мониторинга состояния машин, поскольку он позволяет легко идентифицировать связанные со скоростью вибрации, к примеру дефекты вала и износ подшипников. Для подробного обсуждения этой технологии можно обратиться к работам R. Potter, "A new order tracking method for rotating machinery", Sound and Vibration 24, 1990, 30-34 и K. Fyfe, E. Munck, "Analysis of computed order tracking", Mechanical System and Signal Processing 11 (2), 1997, 187-205.
Отслеживание по порядкам основано на подходе постоянной пространственной дискретизации, согласно которому сигнал вибрации дискретизируется с постоянными угловыми приращениями (т.е. равномерным AG) и, следовательно, на частоте, пропорциональной скорости вращения подшипников. Традиционное отслеживание по порядкам выполняет данную задачу посредством использования системы сбора данных переменно во времени, при этом временная дискретизация выполняется на частоте, которая варьируется пропорционально скорости вращения подшипников. Расчетное отслеживание по порядкам (COT) вместо этого выполняет данную задачу посредством использования системы сбора данных постоянно во времени, в которой сигнал вибрации сначала дискретизируется во времени на постоянной частоте (т.е. постоянная во времени дискретизация с равномерным AT), а затем дискретизированные данные пространственно повторно дискретизируются в цифровой форме с постоянными угловыми приращениями (т.е. постоянная пространственная дискретизация с равномерным AG), чтобы предоставлять требуемые данные постоянного AG. Следовательно, отслеживание по порядкам преобразует реальное начало t отсчета времени в модифицированное начало x отсчета времени так, что сигнал вибрации выглядит, как если он сформирован кусочно посредством подшипника, вращающегося на постоянной скорости. Это преобразование приводит к модифицированному сигналу вибрации, в котором частотная сигнатура данной типологии повреждения может быть найдена, и к удовлетворительному прогнозированию дефектов роликового подшипника.
Сущность изобретения
Заявитель выяснил опытным путем, что, несмотря на свое неоспоримое значение, расчетное отслеживание по порядкам по-прежнему основано на дополнительных допущениях относительно работы сервомотора, таких как работа на высокой скорости вращения (>500 об/мин), необходимость нескольких оборотов вала для определения дефектов, отсутствие реверсирований движения, что не допускает его удовлетворительного применения к сервомоторам, которые работают на произвольно переменной низкой скорости вращения, подвержены циклическим реверсированиям движения и выполняют приблизительно один оборот вала в расчете на цикл, к примеру к сервомоторам, используемым в области техники упаковки продуктов питания, чтобы управлять системами зажимных кулачков.
Следовательно, цель настоящего изобретения состоит в том, чтобы предоставлять технологию, которая дает возможность применения расчетного отслеживания по порядкам также к сервомоторам, которые работают на произвольно переменной низкой скорости вращения, подвержены циклическим реверсированиям движения и выполняют приблизительно один оборот вала в расчете на цикл, к примеру к сервомоторам, используемым в области техники упаковки продуктов питания, чтобы удовлетворительно прогнозировать дефекты роликовых подшипников сервомотора, тем самым давая возможность повышения эффективности текущих программ технического обслуживания машин.
Эта цель достигается посредством настоящего изобретения так, что оно относится к способу прогнозирования дефектов в роликовом подшипнике, к системе обработки цифровых сигналов, запрограммированной так, чтобы реализовывать способ, и к программному продукту, выполненному с возможностью реализовывать при выполнении способ, заданный в прилагаемой формуле изобретения.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения предпочтительные варианты осуществления, которые служат просто в качестве примера и не должны рассматриваться как ограничивающие, далее описываются со ссылкой на прилагаемые чертежи (не нарисованные в масштабе), на которых:
Фиг. 1 показывает общую блок-схему системы сбора данных, выполненной с возможностью реализовывать модифицированное расчетное отслеживание по порядкам согласно настоящему изобретению;
Фиг. 2 показывает общую блок-схему последовательности операций способа модифицированного расчетного отслеживания по порядкам согласно настоящему изобретению;
Фиг. 3 схематично показывает поперечное сечение подшипника с 8 шариками;
Фиг. 4 и 5 показывают операцию типа "вырезать и вставить" согласно первому варианту осуществления настоящего изобретения, которая должна выполняться для обнаруживаемого позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, чтобы тестировать роликовый подшипник на предмет дефекта во внешнем кольце;
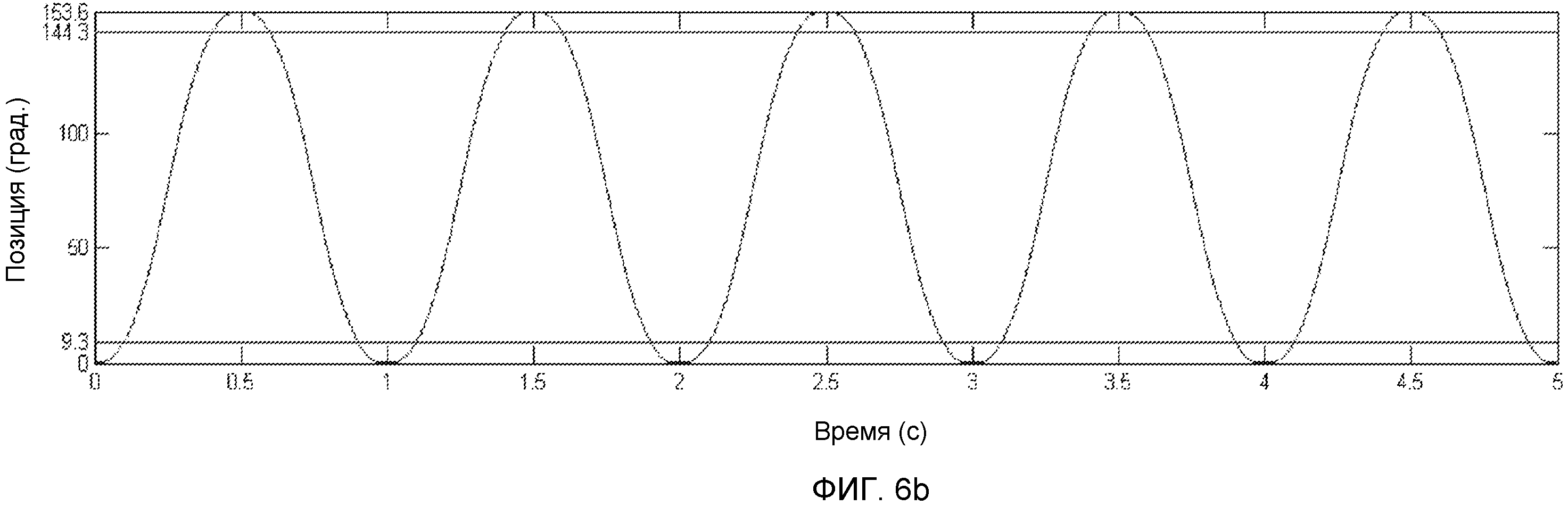
Фиг. 6a и 6b показывают относительные позиции внутреннего кольца и, соответственно, шариковой обоймы в сборе относительно внешнего кольца роликового подшипника, проиллюстрированные в зависимости от времени;
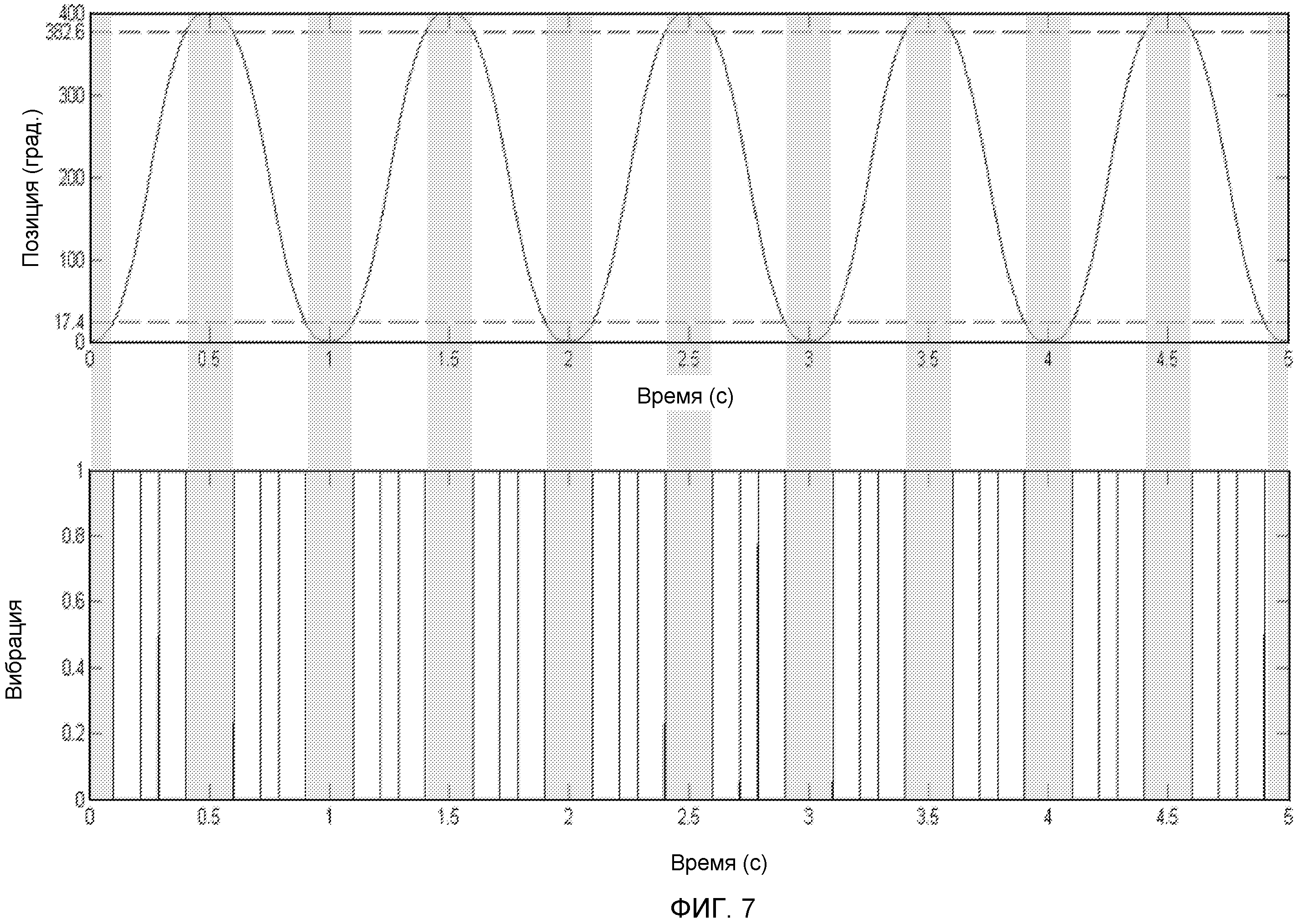
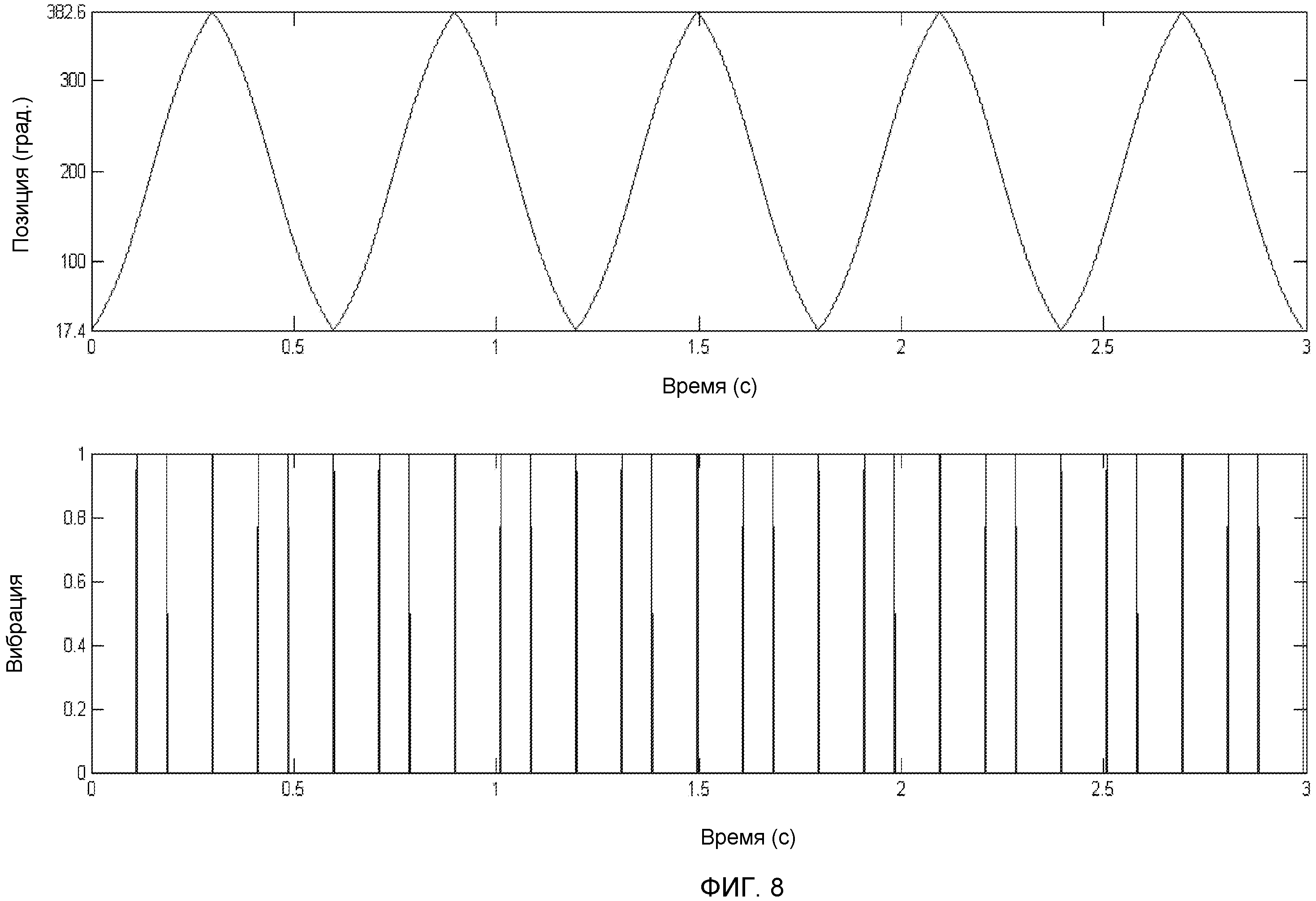
Фиг. 7 и 8 показывают операцию типа "вырезать и вставить" согласно первому варианту осуществления настоящего изобретения, которая должна выполняться для обнаруживаемого позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, чтобы тестировать роликовый подшипник на предмет дефекта во внутреннем кольце;
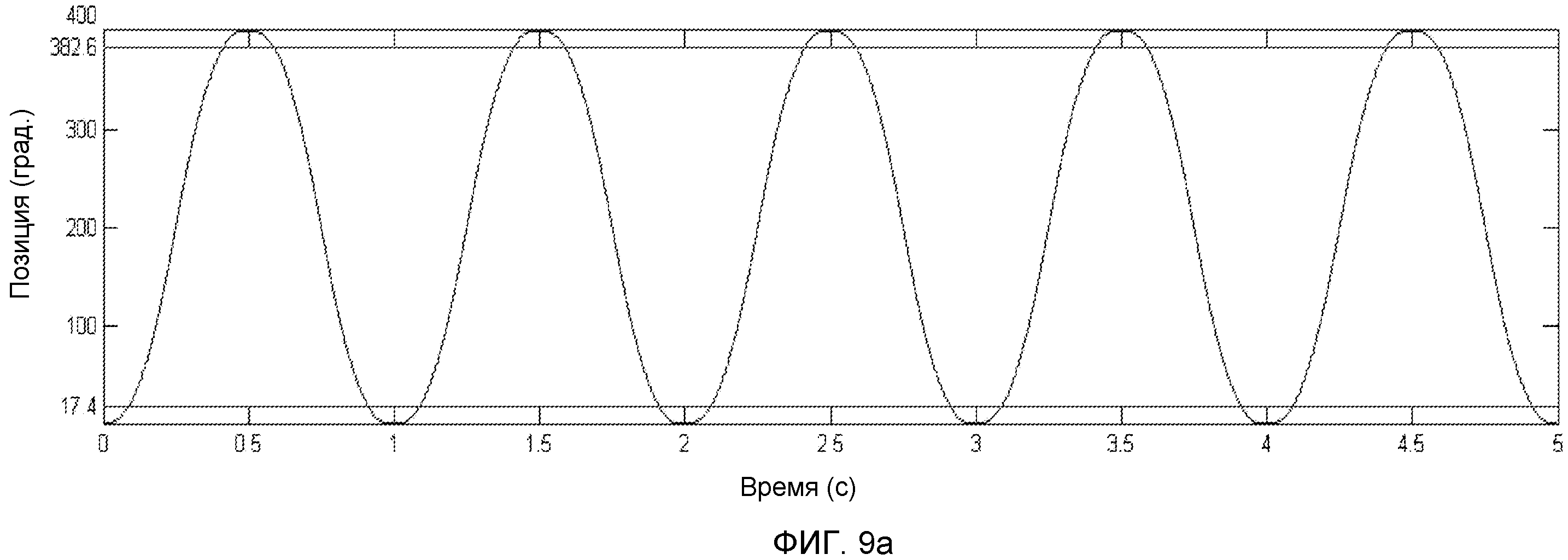
Фиг. 9a и 9b показывают относительные позиции внутреннего кольца относительно внешнего кольца и, соответственно, шариковой обоймы в сборе относительно внутреннего кольца роликового подшипника, проиллюстрированные в зависимости от времени;
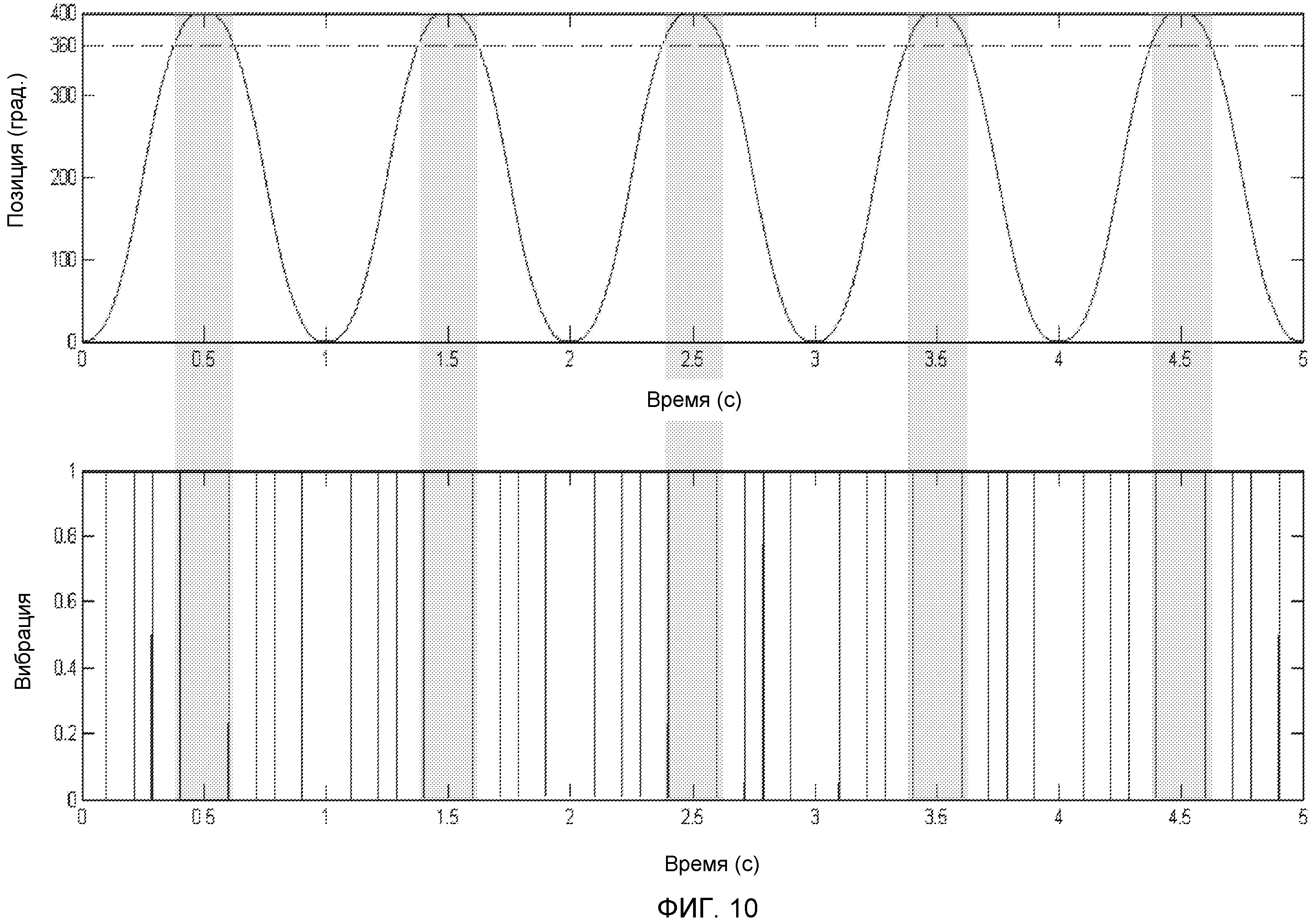
Фиг. 10 и 11 показывают операцию типа "вырезать и вставить" согласно второму варианту осуществления настоящего изобретения, которая должна выполняться для обнаруживаемого позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации;
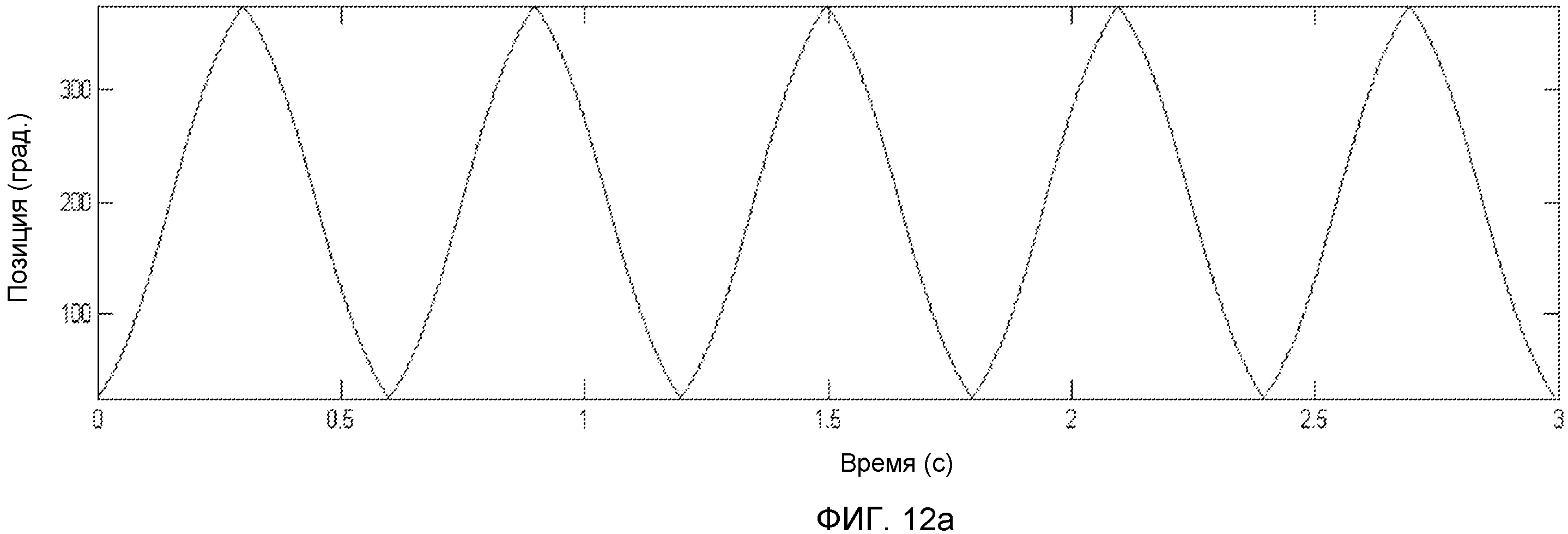
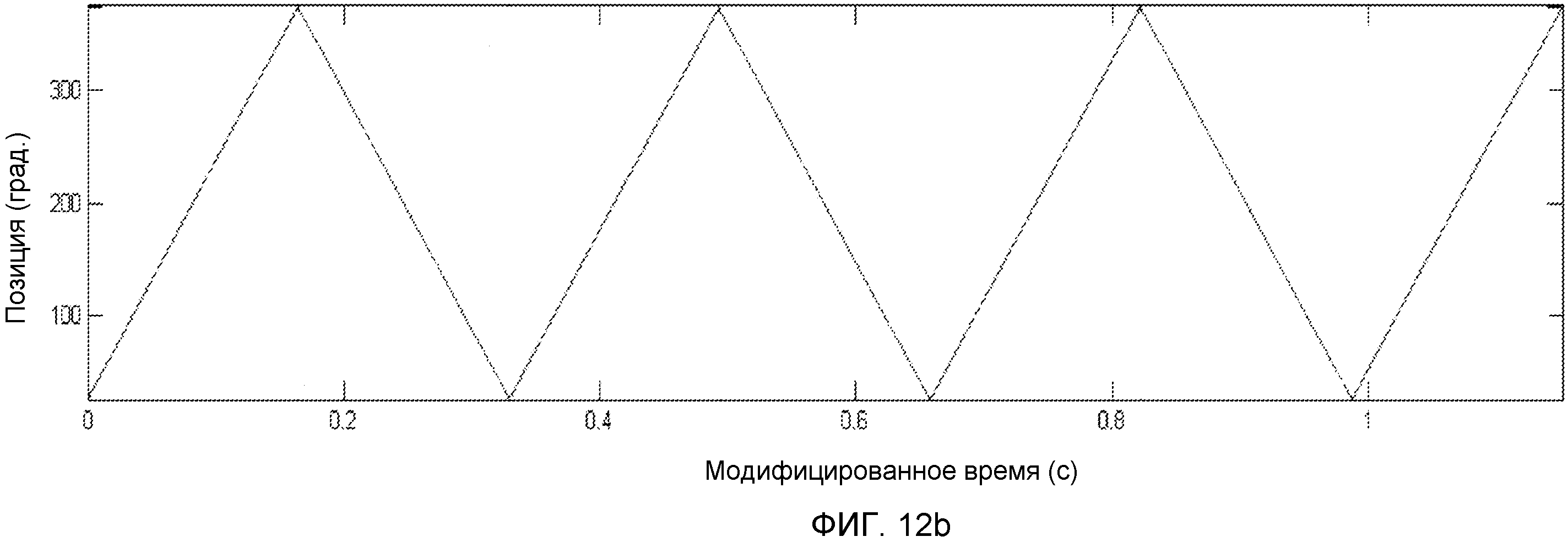
Фиг. 12a и 12b показывают обработанный позиционный сигнал



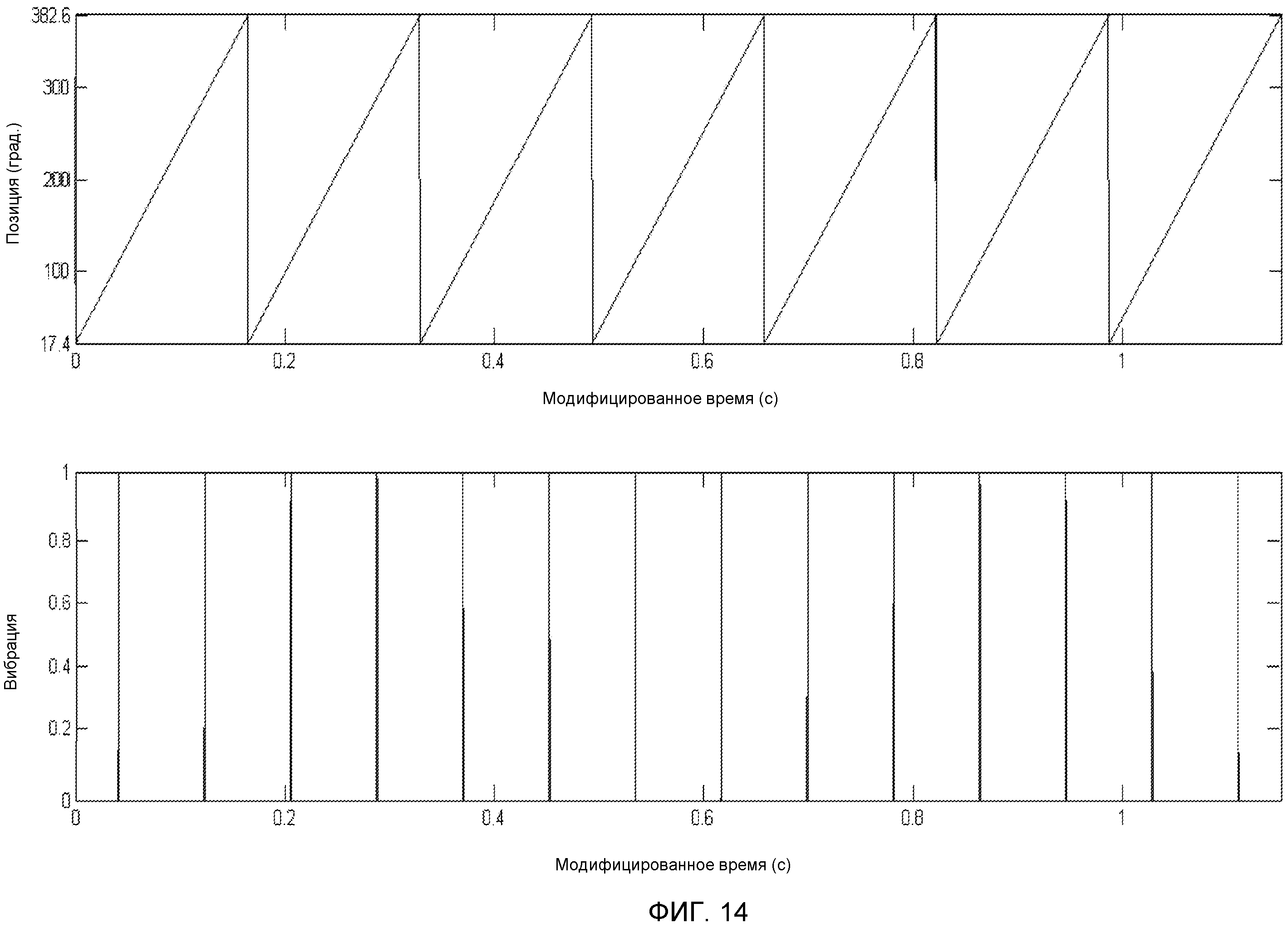
Фиг. 13, 14 и 15 показывают обработанные пространственно дискретизированные позиционные сигналы и сигналы вибрации, полученные посредством перестановки частей пространственно дискретизированных позиционных сигналов и сигналов

Фиг. 16 и 17 показывают частотные спектры обратного сигнала вибрации, показанного на фиг. 13, на котором проиллюстрированы частоты повреждений, касающиеся дефекта внешнего кольца и дефекта внутреннего кольца.
Подробное описание предпочтительных вариантов осуществления
Нижеследующее описание представлено для того, чтобы давать возможность специалистам в данной области техники создавать и использовать изобретение. Различные модификации вариантов осуществления должны быть легко очевидными для специалистов в данной области техники без отступления от объема заявленного изобретения. Таким образом, настоящее изобретение не должно быть ограничено показанными вариантами осуществления, а должно соответствовать самому широкому объему, согласованному с принципами и признаками, раскрытыми в данном документе, и заданному в прилагаемой формуле изобретения.
Основная идея, лежащая в основе настоящего изобретения, состоит в том, чтобы надлежащим образом модифицировать традиционное расчетное отслеживание по порядкам, чтобы принимать во внимание конкретный профиль движения, а именно циклические реверсирования движения и приблизительно один оборот вала в расчете на цикл сервомоторов, используемых в упаковочных линиях продуктов питания, так чтобы предоставлять то, что далее называется модифицированным расчетным отслеживанием по порядкам (MCOT).
Фиг. 1 показывает общую блок-схему системы сбора данных, выполненной с возможностью реализовывать MCOT согласно настоящему изобретению. В частности, на фиг. 1, ссылка с номером 1 обозначает сервомотор с валом 2, с возможностью вращения поддерживаемым посредством роликового подшипника 3 (фиг. 3), содержащего внутреннее кольцо 3a и внешнее кольцо 3b и тела 3c качения, удерживаемые и распределенные равномерно под углом между внутренними и внешними кольцами 3a, 3b посредством обоймы 3d, и дефекты которого должны прогнозироваться через MCOT и который может либо работать циклически в одном направлении, а именно без реверсирования вращения, либо циклически изменять на противоположное свое направление вращения; ссылка с номером 4 обозначает привод сервомотора, который питает сервомотор 1 электроэнергией через силовой кабель 5, принимает из сервомотора 1, через кабель 6 обратной связи, сигнал обратной связи, сформированный посредством датчика положения с высокой разрешающей способностью (не показан), ассоциированного с валом 2 сервомотора, и выводит позиционный сигнал x(t), который формируется на основе сигнала обратной связи из сервомотора 1 и служит признаком угловой позиции вала 2 сервомотора, и, следовательно, внутреннего кольца 3a относительно внешнего кольца 3b роликового подшипника 3; ссылка с номером 7 обозначает акселерометр, который ассоциирован с отслеживаемым роликовым подшипником 3 и выводит сигнал y(t) вибрации, который служит признаком интенсивности вибраций в роликовом подшипнике 3; и ссылка с номером 8 обозначает систему обработки цифровых сигналов, выполненную с возможностью реализовывать MCOT согласно настоящему изобретению. В частности, система 8 обработки цифровых сигналов включает в себя аналого-цифровую плату 9 сбора данных, которая принимает сигнал y(t) вибрации из акселерометра 7 через соединительный кабель 10 и позиционный сигнал x(t) из привода 4 сервомотора через соединительный кабель 11 и которая выполнена с возможностью одновременно дискретизировать постоянно во времени позиционные сигналы и сигналы x(t) и y(t) вибрации, так что в каждое время t дискретизации пара значений x, y



Как показано на фиг. 2, первый этап MCOT (этап 100) является идентификацией варианта компонента подшипника, который должен тестироваться на предмет дефектов (например, дефекты внутреннего кольца, дефекты внешнего кольца и т.д.). В частности, вариант компонента подшипника, который должен тестироваться на предмет дефектов, указывается оператором через графический пользовательский интерфейс (GUI), реализованный посредством системы 8 обработки цифровых сигналов, и является обязательным, поскольку тестирование различных компонентов подшипников для дефектов требует отдельного выполнения MCOT, как должны принимать во внимание читатели далее, когда описывается третий этап MCOT.
Второй этап MCOT (этап 200) является идентификацией подходящей полосы частот [f1, f2], когда выполняется анализ огибающей для дискретизированного во времени сигнала y(t) вибрации: он означает идентификацию резонансной частоты в комплекте, в котором размещается сервомотор, и он может выполняться либо посредством моделирования, либо посредством измерения. Такая информация зависит от варианта применения и, следовательно, практически никогда не изменяется посредством замены сервомотора или даже посредством перехода к другой машине идентичной модели. После того как подходящая полоса частот идентифицирована, дискретизированный во времени позиционный сигнал x(t) и дискретизированный во времени сигнал y(t) вибрации обнаруживаются за данный период времени обнаружения, например 50 с, и затем дискретизированный во времени сигнал y(t) вибрации подвергается полосовой фильтрации [f1, f2] и демодулируется, тем самым получая то, что далее упоминается как фильтрованный сигнал yf(t) вибрации.
Фильтрация и демодуляция дискретизированного во времени сигнала y(t) вибрации выполняется, поскольку фильтрованный сигнал yf(t) вибрации имеет полосу пропускания, равную f2-f1, которая, в общем, гораздо ниже полосы пропускания дискретизированного во времени сигнала y(t) вибрации, и это позволяет значительно повышать четкость результатов, в частности, в очень зашумленной окружающей среде.
Третий этап MCOT (этап 300) является обработкой дискретизированного во времени позиционного сигнала x(t) и фильтрованного дискретизированного во времени сигнала yf(t) вибрации согласно двум различным, альтернативным вариантам осуществления настоящего изобретения.
В первом варианте осуществления настоящего изобретения выполняется конкретная обработка сигналов, которая является следствием всестороннего анализа того, что происходит в неисправном подшипнике в течение его рабочего цикла. Рассмотрим, например, вариант применения сервомотора, в котором сервомотор циклически изменяет на противоположное свое движение каждые 400°, а именно в котором сервомотор имеет рабочий цикл, в течение которого вал сервомотора выполняет угловое смещение в одном направлении, превышающее одно полное вращение (полный угол, т.е. 360°), после чего он реверсирует свое направление вращения. Также рассмотрим случай, когда роликовый подшипник имеет тип с 8 шариками, показанный на фиг. 3, в котором каждая пара смежных шариков разнесена с угловым промежутком 45°. На фиг. 3, абсолютные скорости вращения внутренних и внешних колец и обоймы обозначаются посредством ωI, ωO и ωC соответственно и относительные скорости вращения внутренних и внешних колец относительно промежуточной шариковой обоймы в сборе обозначаются посредством


В рассмотренном варианте применения сервомотора, в котором роликовый подшипник имеет тип с 8 шариками, поддерживает вал сервомотора, и, следовательно, скорость вращения внутреннего кольца равна скорости вращения сервомотора, и внешнее кольцо является стационарным,


Кроме того, относительное угловое смещение шариковой обоймы в сборе относительно внутреннего кольца составляет



В связи с вышеизложенным можно принимать во внимание, что если дефект присутствует во внутреннем или во внешнем кольце, то определенное число ударных воздействий возникает между шариками и неисправным кольцом, и это число, безусловно, зависит от того, где находится дефект (внутреннее или внешнее кольцо), и от углового промежутка между шариками. В частности, если дефект находится во внутреннем кольце, число ударных воздействий равно



С учетом этого можно принимать во внимание, что тот факт, что, в общем,


Заявитель выяснил опытным путем, что это явление оказывает негативное влияние на обнаруживаемый сигнал y(t) вибрации до такой степени, что вышеописанный анализ вибраций, в частности расчетное отслеживание по порядкам, на практике является неудовлетворительным.
Следовательно, обработка сигналов согласно первому варианту осуществления настоящего изобретения направлена на инструктирование дискретизированному во времени позиционному сигналу x(t) и фильтрованному сигналу yf(t) вибрации выглядеть так, как если они сформированы посредством внутреннего кольца, которое непрерывно вращается в одном направлении, а именно без реверсирования направления вращения относительно внешнего кольца, во время которого шариковая обойма в сборе выполняет угловые смещения относительно внутренних и внешних колец соответственно, каждое из которых равно целому кратному углового смещения между двумя последовательными ударными воздействиями в роликовом подшипнике.
Эта цель достигается посредством обработки дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации так, что в каждом рабочем цикле сервомотора они соответствуют угловым смещениям шариковой обоймы в сборе относительно внутреннего кольца и соответственно внешнего кольца, каждое из которых равно целому кратному углового промежутка между двумя смежными элементами качения подшипника.
Вышеуказанная обработка сигналов достигается посредством вырезания и вставки дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, чтобы удалять (срезать) их части, которые обеспечивают достижение вышеуказанного результата.
Эта операция показана на фиг. 4-6 и на фиг. 7-9, причем первые три из них относятся к поиску дефекта во внешнем кольце, а последние три из них относятся к поиску дефекта во внутреннем кольце. В частности, фиг. 4 и 7 показывают дискретизированные во времени позиционные сигналы x(t), фильтрованные сигналы yf(t) вибрации и их части, ограниченные посредством прямоугольников серого цвета, которые должны быть срезаны, тогда как фиг. 5 и 8 показывают обработанные позиционные сигналы и сигналы


В частности, фиг. 4 относится к поиску дефекта во внешнем кольце, относительное угловое смещение которого относительно шариковой обоймы в сборе составляет 153,6°, в течение которого возникают три ударных воздействия между дефектами и шариками. Следовательно, чтобы шариковая обойма выполнила угловое смещение, равное целому кратному углового смещения между двумя последовательными ударными воздействиями во внешнем кольце, такое угловое смещение должно составлять 3·45°=135° (целое кратное углового промежутка между двумя смежными шариками подшипника), что, в свою очередь, соответствует угловому смещению внутреннего кольца 135°/0,384=351,6°. Следовательно, чтобы дискретизированный во времени позиционный сигнал x(t) соответствовал угловому смещению внутреннего кольца 351,6°, части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, соответствующие угловому смещению 400°-351,6°=48,4° внутреннего кольца, должны срезаться.
Чтобы сохраненные части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации центрировались в соответствующих рабочих циклах сервомотора так, чтобы исключать части, в которых вал сервомотора изменяет на противоположное свое направление вращения, и, следовательно, во время переходного состояния вращения части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, которые должны срезаться, являются частями, которые соответствуют начальным и конечным частям рабочих циклов сервомотора, в равной степени, в примере, показанном на фиг. 4, частями в диапазоне 0-24,2° и 375,8-400°, тем самым сохраняя части в диапазоне 24,2-375,8°.
Специалисты в данной области техники могут принимать во внимание, что могут срезаться части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, отличные от частей, показанных на фиг. 4, которые обеспечивают достижение идентичного результата. Например, могут срезаться части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, соответствующие начальным или конечным частям исходных рабочих циклов, а именно в диапазоне 0-48,4° или 351,6-400° соответственно.
Идентичное вычисление может выполняться в области углового смещения шариковой обоймы в сборе, а не в области вала сервомотора. В частности, чтобы дискретизированный во времени позиционный сигнал x(t) соответствовал угловому смещению сепаратора подшипника качения 135° и чтобы сохраненные части дискретизированного во времени позиционного сигнала x(t) центрировались в рабочих циклах, части в диапазоне 0-9,3° и 144,3-153,6° (которые в области вала сервомотора соответствуют ранее указанным диапазонам 0-24,2° и 375,8-400°) должны срезаться, а части в диапазоне 9,3-144,3° (которые в области вала сервомотора соответствуют ранее указанным диапазонам 24,2-375,8°) должны быть сохранены.
Вышеуказанные диапазоны проиллюстрированы на фиг. 6a и 6b, причем позиции внутреннего кольца (фиг. 6a) и шариковой обоймы в сборе (фиг. 6b) относительно внешнего кольца проиллюстрированы в зависимости от времени.
Фиг. 7 относится вместо этого к поиску дефекта во внутреннем кольце, относительное угловое смещение которого относительно шариковой обоймы в сборе составляет 246,4°, в течение которого возникают пять ударных воздействий между дефектами и шариками. Следовательно, чтобы шариковая обойма в сборе выполнила угловое смещение, равное целому кратному углового смещения между двумя последовательными ударными воздействиями во внутреннем кольце, такое угловое смещение должно составлять 5·45°=225° (целое кратное углового промежутка между двумя смежными шариками подшипника), что, в свою очередь, соответствует угловому смещению внутреннего кольца 225°/0,0616=365,2°. Следовательно, чтобы дискретизированный во времени позиционный сигнал x(t) соответствовал угловому смещению внутреннего кольца 365,2°, части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, соответствующие угловому смещению 400°-365,2°=34,8° внутреннего кольца, должны срезаться.
Чтобы сохраненные части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации центрировались в соответствующих рабочих циклах сервомотора так, чтобы исключать части, в которых вал сервомотора изменяет на противоположное свое направление вращения, и, следовательно, во время переходного состояния вращения части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, которые должны срезаться, являются частями, которые соответствуют начальным и конечным частям рабочих циклов сервомотора, в равной степени, в примере, показанном на фиг. 7, частями в диапазоне 0-17,4° и 382,6-400°, тем самым сохраняя части в диапазоне 17,4-382,6°.
Специалисты в данной области техники могут принимать во внимание, что могут срезаться части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, отличные от частей, показанных на фиг. 7, которые обеспечивают достижение идентичного результата. Например, могут срезаться части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, соответствующие начальным или конечным частям исходных рабочих циклов, а именно в диапазоне 0-34,8° или 365,2-400° соответственно.
Идентичное вычисление может выполняться в области углового смещения шариковой обоймы в сборе, а не в области вала сервомотора. В частности, чтобы дискретизированный во времени позиционный сигнал x(t) соответствовал угловому смещению сепаратора подшипника качения 225° и чтобы сохраненные части дискретизированного во времени позиционного сигнала x(t) центрировались в рабочих циклах, части в диапазоне 0-10,7° и 235,7-246,4° (которые в области вала сервомотора соответствуют ранее указанным диапазонам 0-17,4° и 382,6-400°) должны срезаться, а части в диапазоне 10,7-235,7° (которые в области вала сервомотора соответствуют ранее указанным диапазонам 17,4-382,6°) должны быть сохранены.
Вышеуказанные диапазоны проиллюстрированы на фиг. 9a и 9b, причем позиции внутреннего кольца относительно внешнего кольца (фиг. 9a) и шариковой обоймы в сборе относительно внутреннего кольца (фиг. 9b) проиллюстрированы в зависимости от времени.
В связи с вышеизложенным можно принимать во внимание, что угловой промежуток между двумя смежными элементами качения подшипника зависит от типа и геометрии роликового подшипника и, следовательно, что вышеуказанная обработка сигналов зависит, помимо того, какой компонент подшипника должен быть протестирован на предмет дефектов (внутреннее кольцо или внешнее кольцо), также от геометрических параметров подшипника.
Во втором варианте осуществления настоящего изобретения дискретизированный во времени позиционный сигнал x(t) и фильтрованный сигнал yf(t) вибрации обрабатываются так, что они соответствуют целому числу полных оборотов (360°) внутреннего кольца относительно внешнего кольца, а именно так, что они выглядят, как если они сформированы посредством внутреннего кольца, которое непрерывно вращается в идентичном направлении, а именно без реверсирования направления вращения относительно внешнего кольца, во время которого оно выполняет целое число полных оборотов относительно внешнего кольца. Безусловно, чем выше число полных оборотов, тем более полной является информация, на основе которой должен выполняться анализ вибраций.
Также в этом втором варианте осуществления, данная задача выполняется посредством выполнения операции типа "вырезать и вставить" для дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации аналогично операции, ранее описанной в отношении первого варианта осуществления настоящего изобретения.
Эта операция показана на фиг. 10 и 11, которые являются аналогичными фиг. 4 и 5 и на которых части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, которые должны срезаться, - это части, которые соответствуют конечным частям исходного рабочего цикла, а именно части, превышающей 360°, т.е. в диапазоне 360-400°.
Специалисты в данной области техники могут принимать во внимание, что могут срезаться части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, отличные от частей, показанных на фиг. 10, которые обеспечивают достижение идентичного результата.
Например, могут срезаться части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, соответствующие начальным частям исходных рабочих циклов, а именно части в диапазоне 0-40° или части дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации, соответствующие начальным и конечным частям исходных рабочих циклов, легко в равной степени, например, части в диапазоне 0-20° и 380-400°, тем самым приводя к центрированию сохраненных частей дискретизированного во времени позиционного сигнала x(t) и фильтрованного сигнала yf(t) вибрации в соответствующих рабочих циклах.
Необходимо отметить, что операция типа "вырезать и вставить" может быть необязательной, если вращение тестируемого подшипника является монотонным и линейно изменяющимся, до тех пор пока существует определенное число полных оборотов в дискретизированном во времени позиционном сигнале x(t) и фильтрованном сигнале yf(t) вибрации, но становится крайне важной в случае циклического движения. Эта операция проводится с помощью коэффициентов пропускания в (2) и на практике выводит, в качестве результата, два вектора

В связи с вышеизложенным можно принимать во внимание, что для обработки дискретизированного во времени позиционного сигнала x(t) и фильтрованного дискретизированного во времени сигнала yf(t) так, как описано выше, более необязательно знать заранее, что является вариантом компонента подшипника, который должен быть протестирован на предмет дефектов, и, следовательно, в этом втором варианте осуществления данный этап может быть опущен.
Также необходимо отметить, что два варианта осуществления настоящего изобретения описаны в отношении применения сервомотора, в котором роликовый подшипник поддерживает вал сервомотора, и, следовательно, внешнее кольцо крепится к стационарной части сервомотора, в то время как внутреннее кольцо с возможностью вращения присоединяется к валу сервомотора и, следовательно, вращается относительно внешнего кольца с идентичной скоростью сервомотора. Следовательно, в рассмотренном варианте применения относительное вращение внутреннего кольца относительно внешнего кольца соответствует вращению вала сервомотора. Тем не менее, можно принимать во внимание, что то, что описано выше относительно рассмотренного варианта применения, может, в общем, применяться к любому другому варианту применения, в котором внутренние и внешние кольца вращаются относительно друг друга, а именно в котором внутреннее кольцо крепится к стационарному элементу, а внешнее кольцо соединяется с возможностью вращения с вращающимся элементом, и в котором как внутренние, так и внешние кольца соединяются с возможностью вращения с вращающимися элементами, которые вращаются в идентичных или различных направлениях.
Специалисты в данной области техники также должны принимать во внимание, что идея настоящего изобретения также применяется к роликовым подшипникам, которые структурно отличаются, но являются функционально эквивалентными роликовым подшипникам, описанным выше, в частности, к роликовым подшипникам, в которых тела качения удерживаются и разносятся равномерно под углом посредством средства удержания, отличного от обоймы, описанной выше, или к роликовым подшипникам без внутреннего или без внешнего кольца, а именно в которых тела качения непосредственно лежат и радиально удерживаются посредством внутреннего или посредством, соответственно, внешнего вращающегося элемента, который, следовательно, играет роль соответствующего отсутствующего кольца.
Со ссылкой снова на блок-схему последовательности операций способа, показанную на фиг. 2, четвертый этап MCOT (этап 400) является пространственной дискретизацией, в частности постоянной пространственной дискретизацией обработанных позиционных сигналов и сигналов



- где Ax представляет период пространственной дискретизации, который связан с минимальным физическим размером дефекта, который может определяться посредством алгоритма, и имеет порядок величины в десятые или сотые градусов.
В псевдокоде, преобразование F состоит в следующем:
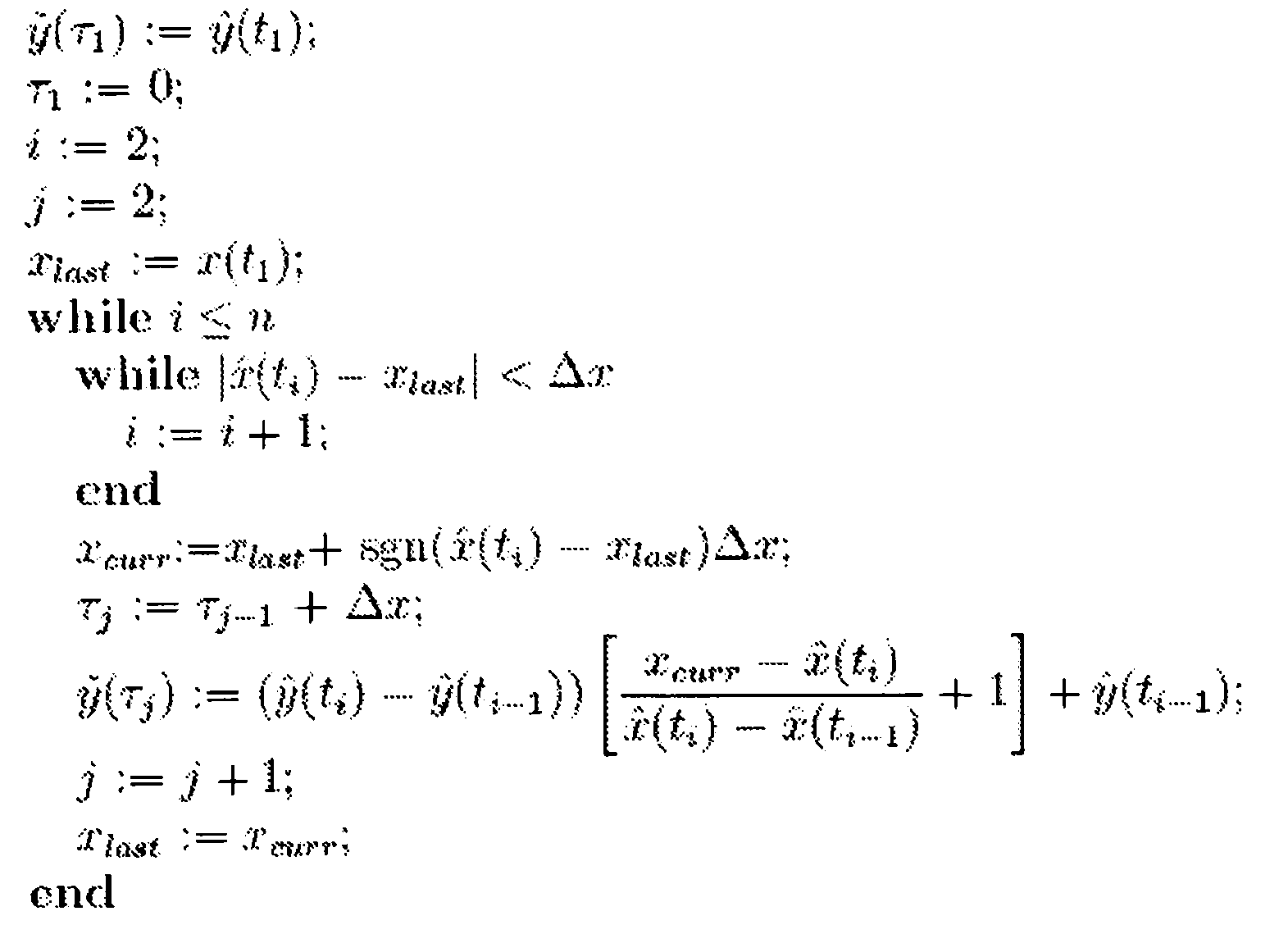
что означает, проще говоря, то, что точки в
Необходимо отметить, что, как показано на фиг. 12a и 12b, поскольку обработанный позиционный сигнал
Благодаря преобразованию F, таким образом, можно формировать пространственно дискретизированный сигнал
Следовательно, пятый этап MCOT (этап 500) является перестановкой, т.е. переворотом (переворачиванием вверх дном) частей пространственно дискретизированных позиционных сигналов и сигналов
Необходимо подчеркнуть, что операция обращения является обязательной только тогда, когда вал сервомотора и, следовательно, ассоциированный роликовый подшипник работают так, чтобы циклически изменять на противоположное свое направление вращения, и вообще не является обязательной, когда вал сервомотора и, следовательно, ассоциированный роликовый подшипник работают циклически без изменения на противоположное своего направления вращения.
Также необходимо отметить, что для циклических движений тот факт, что (1) выполняется, также зависит от операции вырезания перед повторной дискретизацией, поскольку это гарантирует то, что для каждого цикла присутствует целое число ударных воздействий на потенциально поврежденный компонент.
В завершение шестой и последний этап MCOT (этап 600) является вычислением частоты fr вращения и затем частоты fd повреждений на основе обратного позиционного сигнала, вычислением частотного спектра обратного сигнала вибрации посредством быстрого преобразования Фурье для него и затем посредством поиска пиков в частотном спектре обратного сигнала вибрации, которые отделены по частоте на величину, равную частоте fd повреждений, как в классическом анализе вибраций.
Фиг. 15 и 16 показывают два частотных спектра обратного сигнала вибрации, полученного посредством осуществления дважды MCOT согласно первому варианту осуществления настоящего изобретения, чтобы тестировать роликовый подшипник на предмет дефекта во внутреннем кольце и, соответственно, во внешнем кольце. В частности, частотная сигнатура (частота fd повреждений и соответствующая ее первая высшая гармоника), касающаяся дефекта внутреннего кольца, проиллюстрирована посредством квадратов на фиг. 15, в то время как частотная сигнатура, касающаяся дефекта внешнего кольца, проиллюстрирована посредством кругов на фиг. 16. Можно принимать во внимание, что на фиг. 15 частота повреждений, касающаяся дефекта внутреннего кольца, присутствует при значении, при котором огибающая частотного спектра имеет относительный максимум, тем самым выступая признаком дефекта во внутреннем кольце, в то время как на фиг. 16 частота повреждений, касающаяся дефекта внешнего кольца, присутствует при значении, при котором огибающая частотного спектра имеет относительный минимум, тем самым указывая отсутствие дефектов во внешнем кольце.
Реферат
Настоящее изобретение относится, в общем, к прогнозирующему техническому обслуживанию роликовых подшипников, в частности к ориентированному на техническое обслуживание мониторингу на основе состояния роликовых подшипников в сервомоторах, работающих на произвольно переменной низкой скорости и с (циклическими) реверсированиями движения, к примеру в сервомоторах, используемых в разливочных машинах или распределительном оборудовании упаковочных линий, выполненных с возможностью формировать запечатанные упаковки, содержащие продукты питания. Заявленная группа изобретений относится к способам прогнозирования дефектов в роликовом подшипнике и к системе обработки цифровых сигналов, запрограммированной так, чтобы реализовывать способ. При этом способ прогнозирования дефектов в роликовом подшипнике, в котором роликовый подшипник включает в себя внутренние и внешние кольца и тела качения, распределенные равномерно под углом между ними, содержит: обработку (в DSP-системе 8) позиционного сигнала (x(t)), указывающего относительную угловую позицию внутреннего кольца относительно внешних колец, и сигнала (y(t)) вибрации (посредством акселерометра 7), указывающего связанные со скоростью вибрации в роликовом подшипнике, так что они соответствуют либо угловому смещению тел качения, равному целому числу угловых промежутков между смежными телами качения, либо целому числу полных оборотов внутреннего кольца относительно внешнего кольца; пространственную дискретизацию (в аналого-цифровой плате 9 сбора данных) обработанного сигнала (y(t)) вибрации на основе обработанного позиционного сигнала (x(t)); и прогнозирование дефек�
Формула
- обрабатывают позиционный сигнал (x(t)), указывающий относительную угловую позицию внутреннего кольца (3a) относительно внешнего кольца (3b), и сигнал (y(t)) вибрации, указывающий связанные со скоростью вибрации в роликовом подшипнике (3), так что они соответствуют либо угловому смещению тел (3c) качения, равному целому числу угловых промежутков между смежными телами (3c) качения, либо целому числу полных оборотов внутреннего кольца (3a) относительно внешнего кольца (3b);
- пространственно дискретизируют обработанный сигнал (


- прогнозируют дефекты в роликовом подшипнике (3) на основе пространственно дискретизированного сигнала (

- удаляют из позиционных сигналов и сигналов (x(t), y(t)) вибрации части, которые приводят к тому, что они не соответствуют либо угловому смещению тел (3c) качения, равному целому числу угловых промежутков между смежными телами (3c) качения роликового подшипника (3), либо целому числу полных оборотов внутреннего кольца (3a) относительно внешнего кольца (3b); и
- объединяют по очереди оставшиеся части позиционных сигналов и сигналов (x(t), y(t)) вибрации.
- обрабатывают позиционные сигналы и сигналы (x(t), y(t)) вибрации так, что они соответствуют, в каждом рабочем цикле, либо угловому смещению тел (3c) качения, равному целому числу угловых промежутков между смежными телами (3c) качения, либо целому числу полных оборотов внутреннего кольца (3a) относительно внешнего кольца (3b).
- обрабатывают позиционные сигналы и сигналы (x(t), y(t)) вибрации так, что они соответствуют, в каждом рабочем цикле, либо угловому смещению тел (3c) качения, равному целому числу угловых промежутков между смежными телами (3c) качения, либо целому числу полных оборотов внутреннего кольца (3a) относительно внешнего кольца (3b); и
- обрабатывают пространственно дискретизированный сигнал (


- пространственно дискретизируют обработанный позиционный сигнал (

- переставляют части пространственно дискретизированного сигнала (
- вычисляют относительное угловое смещение тел (3c) качения относительно выбранного одного из внутренних и внешних колец (3a, 3b), так что оно равно целому числу угловых промежутков между смежными телами (3c) качения, на основе позиционного сигнала (x(t)); и
- обрабатывают сигналы вибрации (x(t), yf(t)) на основе вычисленного относительного углового смещения тел (3c) качения.
- выполняют постоянную пространственную дискретизацию.
- выполняют быстрое преобразование Фурье пространственно дискретизированного сигнала (
- выполняют поиск характеристики частотной сигнатуры дефекта.
- выбирают одно из внутренних и внешних колец (3a, 3b); и
- осуществляют способ по любому из предшествующих пунктов, чтобы тестировать роликовый подшипник (3) на предмет дефекта в выбранном кольце (3a, 3b).
- выполняют временную дискретизацию позиционных сигналов и сигналов (x(t), y(t)) вибрации.
- выполняют, по меньшей мере, полосовую фильтрацию и анализ огибающей для сигнала (y(t)) вибрации.
- обрабатывают позиционный сигнал (x(t)), указывающий относительную угловую позицию внутреннего кольца (3a) относительно внешнего кольца (3b), и сигнал (y(t)) вибрации, указывающий связанные со скоростью вибрации в роликовом подшипнике (3), так что они соответствуют либо угловому смещению тел (3c) качения, равному целому числу угловых промежутков между смежными телами (3c) качения, либо целому числу полных оборотов внутреннего кольца (3a) относительно внешнего кольца (3b);
- пространственно дискретизируют обработанный сигнал (
- прогнозируют дефекты в роликовом подшипнике (3) на основе пространственно дискретизированного сигнала (
причем обработка позиционных сигналов (x(t), (y(t)) вибрации включает в себя этапы, на которых:
- вычисляют относительное угловое смещение тел (3c) качения относительно выбранного одного из внутренних и внешних колец (3a, 3b), так что оно равно целому числу угловых промежутков между смежными телами (3c) качения, на основе позиционного сигнала (x(t)); и
- обрабатывают сигналы вибрации (x(t), yf(t)) на основе вычисленного относительного углового смещения тел (3c) качения.
- удаляют из позиционных сигналов и сигналов (x(t), y(t)) вибрации части, которые приводят к тому, что они не соответствуют либо угловому смещению тел (3c) качения, равному целому числу угловых промежутков между смежными телами (3c) качения роликового подшипника (3), либо целому числу полных оборотов внутреннего кольца (3a) относительно внешнего кольца (3b); и
- объединяют по очереди оставшиеся части позиционных сигналов и сигналов (x(t), y(t)) вибрации.
- обрабатывают позиционные сигналы и сигналы (x(t), y(t)) вибрации так, что они соответствуют, в каждом рабочем цикле, либо угловому смещению тел (3c) качения, равному целому числу угловых промежутков между смежными телами (3c) качения, либо целому числу полных оборотов внутреннего кольца (3a) относительно внешнего кольца (3b).
- обрабатывают позиционные сигналы и сигналы (x(t), y(t)) вибрации так, что они соответствуют, в каждом рабочем цикле, либо угловому смещению тел (3c) качения, равному целому числу угловых промежутков между смежными телами (3c) качения, либо целому числу полных оборотов внутреннего кольца (3a) относительно внешнего кольца (3b); и
- обрабатывают пространственно дискретизированный сигнал (
- пространственно дискретизируют обработанный позиционный сигнал (
- переставляют части пространственно дискретизированного сигнала (
- выполняют постоянную пространственную дискретизацию.
- выполняют быстрое преобразование Фурье пространственно дискретизированного сигнала (
- выполняют поиск характеристики частотной сигнатуры дефекта.
- выбирают одно из внутренних и внешних колец (3a, 3b); и
- осуществляют способ по любому из предшествующих пунктов, чтобы тестировать роликовый подшипник (3) на предмет дефекта в выбранном кольце (3a, 3b).
- выполняют временную дискретизацию позиционных сигналов и сигналов (x(t), y(t)) вибрации.
- выполняют, по меньшей мере, полосовую фильтрацию и анализ огибающей для сигнала (y(t)) вибрации
Комментарии