Управление установкой гибких насосно-компрессионных труб на площадке скважины - RU2744468C1
Код документа: RU2744468C1
Чертежи


Описание
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Данная заявка испрашивает преимущество заявки США № 15/697919, поданной 7 сентября 2017 г., которая полностью включена в настоящий документ путем ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Варианты осуществления, описанные в настоящем документе, по существу относятся к работам по разведке и добыче в скважинах и, более конкретно, к техническим приемам по управлению установкой ГНКТ на площадке скважины.
[0003] В области бурения и заканчивания скважин обычно происходит формирование стволов скважин для добычи или нагнетания текучей среды. Такие стволы скважин используют для разведки или извлечения природных ресурсов, таких как углеводороды, нефть, газ, вода, и альтернативно для секвестрации CO2. Для проведения внутрискважинных работ, заканчивания скважин и/или для эксплуатационных колонн иногда используют гибкие насосно-компрессорные трубы (ГНКТ) для регулирования и/или обеспечения канала для потока текучей среды на поверхность и/или с поверхности или обеспечения операций, аналогичных канатным операциям. Таким образом, ГНКТ используют при выполнении многих операций на скважинах, включая циркуляцию, перекачивание, бурение, каротаж, перфорацию и добычу. ГНКТ транспортируют на площадку скважины на катушках или барабанах. Система инжекторной головки обеспечивает разворачивание и извлечение намотанных на барабаны ГНКТ.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В соответствии с одним вариантом осуществления настоящего описания предложен способ, реализованный с применением компьютера, для управления установкой гибких ГНКТ на площадке скважины. Способ включает прием скважинных данных с помощью устройства обработки. Способ дополнительно включает генерирование устройством обработки плана автоматизированного управления ГНКТ для установки ГНКТ по меньшей мере частично на основе скважинных данных. Способ дополнительно включает управление установкой ГНКТ с помощью устройства обработки с использованием плана автоматизированного управления ГНКТ для спуска ГНКТ в ствол скважины на площадке скважины на заданную глубину, ожидания в течение периода ожидания и подъема ГНКТ из ствола скважины, и корректировку устройством обработки плана автоматизированного управления ГНКТ по меньшей мере частично на основе обнаруженного датчиком состояния во время управления установкой ГНКТ. Причем в ходе управления установкой ГНКТ с помощью плана автоматизированного управления ГНКТ в процессе спуска ГНКТ в ствол скважины осуществляется процедура проверки, включающая: остановку спуска ГНКТ в ствол скважины; перемещение ГНКТ в обратном направлении на заданное расстояние; измерение массы ГНКТ; и определение, соответствует ли масса ГНКТ ожидаемой массе.
[0005] В соответствии с другим вариантом осуществления настоящего описания предложена система для управления установкой ГНКТ на площадке скважины. Система включает в себя запоминающее устройство, содержащее машиночитаемые команды, и устройство обработки для выполнения машиночитаемых команд для осуществления способа. Способ включает прием данных с помощью устройства обработки. Способ дополнительно включает генерирование устройством обработки плана автоматизированного управления ГНКТ для установки ГНКТ по меньшей мере частично на основе данных, причем план автоматизированного управления ГНКТ содержит множество заданных значений. Способ дополнительно включает управление установкой ГНКТ с помощью устройства обработки с использованием плана автоматизированного управления ГНКТ путем применения множества заданных значений во время выполнения операции, и корректировку устройством обработки плана автоматизированного управления ГНКТ по меньшей мере частично на основе обнаруженного датчиком состояния во время управления установкой ГНКТ. Причем в ходе управления установкой ГНКТ с помощью плана автоматизированного управления ГНКТ в процессе спуска ГНКТ в ствол скважины осуществляется процедура проверки, включающая: остановку спуска ГНКТ в ствол скважины; перемещение ГНКТ в обратном направлении на заданное расстояние; измерение массы ГНКТ; и определение, соответствует ли масса ГНКТ ожидаемой массе.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0006] На графических материалах одинаковые элементы пронумерованы одинаково на нескольких фигурах, причем:
[0007] на ФИГ. 1 показан вид сбоку в перспективе установки ГНКТ в процессе работы на площадке скважины в соответствии с аспектами настоящего описания;
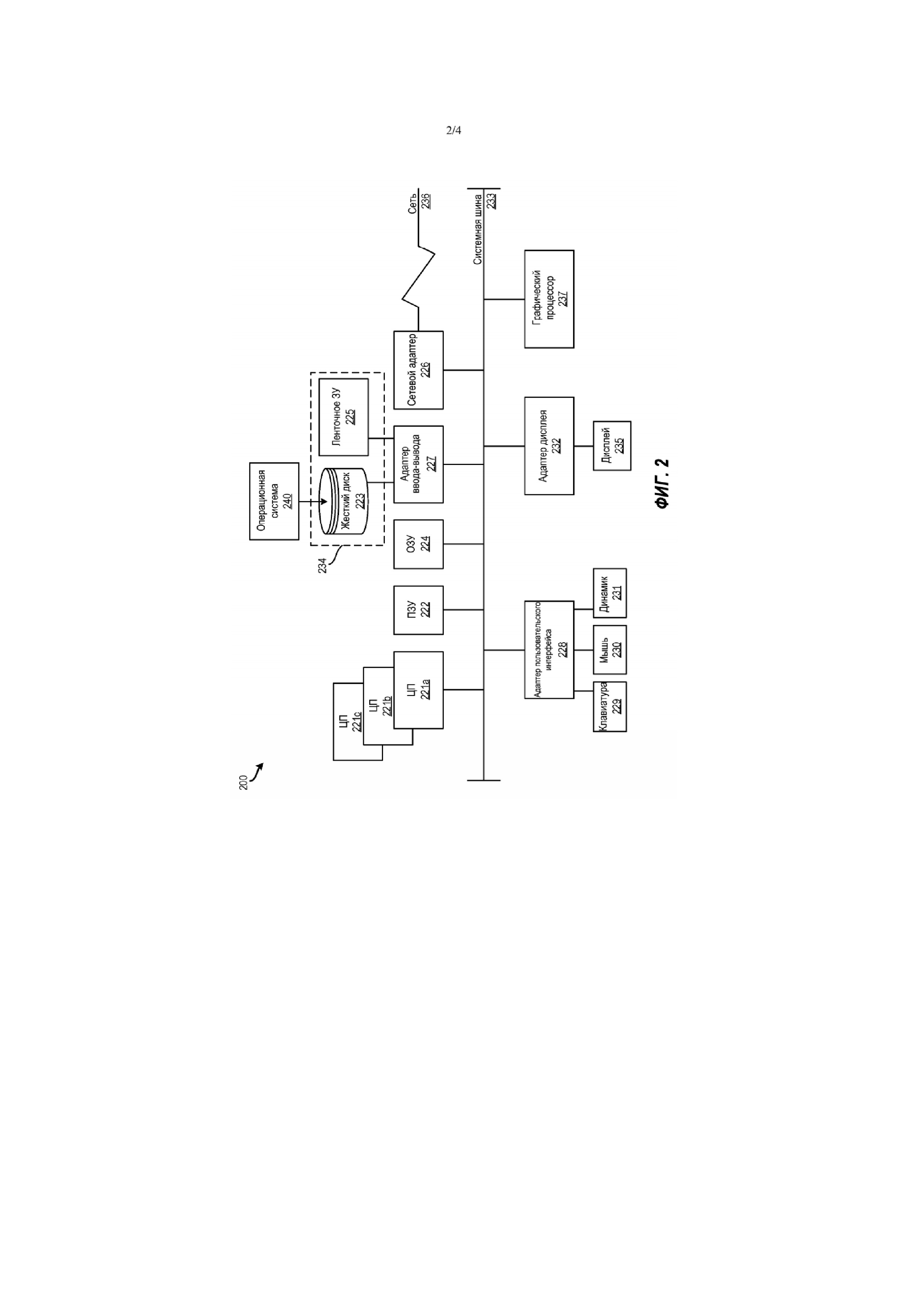
[0008] на ФИГ. 2 показана блок-схема системы обработки данных, которую можно использовать для реализации технических приемов, описанных в настоящем документе, в соответствии с аспектами настоящего описания;
[0009] на ФИГ. 3 показана схема последовательности операций для способа управления установкой ГНКТ на площадке скважины в соответствии с аспектами настоящего описания; и
[0010] на ФИГ. 4 показана блок-схема системы управления установкой ГНКТ на площадке скважины в соответствии с аспектами настоящего описания.
ПОДРОБНОЕ ОПИСАНИЕ
[0011] Настоящие технические приемы относятся к управлению установкой ГНКТ на площадке скважины. В существующих установках ГНКТ защита ГНКТ зависит от заданных предельных давлений (например, минимального давления и максимального давления). Однако в других отношениях существующие установки ГНКТ имеют ручное управление (т. е. управляются оператором), и эти ограничения лишь ограничивают действия оператора. Например, минимальные и максимальные предельные давления представляют собой предельные давления, которые можно приложить к инжектору ГНКТ, и они, в свою очередь, означают, какую массу можно контролировать с помощью ГНКТ. Такие ограничения лишь ограничивают ручные действия оператора для защиты ГНКТ от разрушения.
[0012] Технические приемы настоящего изобретения позволяют автоматизировать функции установки ГНКТ, включая ввод трубы на заданную глубину на безопасных скоростях (т. е. скоростях подачи ГНКТ) в скважину (например, спуск в скважину) и вывод трубы из скважины на поверхность на безопасных скоростях намотки трубы (например, подъем из скважины). Для этого технические приемы настоящего изобретения позволяют управлять инжекторной головкой, находящейся на поверхности. Инжекторной головкой можно управлять на основе скорости подачи ГНКТ, с которой ГНКТ вводится или выводится из скважины, и/или давления, прилагаемого к ГНКТ.
[0013] Соответственно, инжекторная головка может автоматически вводить ГНКТ в скважину и выводить ее из скважины. Например, технические приемы настоящего изобретения позволяют вводить ГНКТ на заданную глубину в скважине, приподнимать ГНКТ, проверять массу и глубину ГНКТ, а затем продолжать ввод ГНКТ в скважину. Управление этими функциями происходит автоматически на основе данных о площадке скважины и данных, собранных оборудованием, используемым на площадке скважины. Это повышает эффективность и согласованность работы и обеспечивает автоматизацию установок ГНКТ на площадках скважин.
[0014] На ФИГ. 1 показан вид сбоку в перспективе установки 100 ГНКТ в процессе работы на площадке 112 скважины в соответствии с аспектами настоящего описания. Установка 100 ГНКТ может представлять собой прицеп, установленный на прицепной платформе 114 (или тележке-платформе) для обеспечения возможности транспортировки и выполненный с возможностью перемещения грузовым автомобилем 116 или альтернативно с помощью поезда или другого подходящего транспортного средства. В другом варианте осуществления установка 100 ГНКТ может быть предусмотрена на шельфовом судне или на плавучей буровой платформе или непосредственно на поверхности площадки 112 скважины.
[0015] ГНКТ 118 намотана на барабан 120, расположенный на прицепной платформе 114, и доставляется на площадку 112 грузовым автомобилем 116. Инжекторная головка 122 ГНКТ выполнена с возможностью введения ГНКТ 118 в ствол скважины, который уходит вниз от поверхности площадки 112 скважины. Инжекторная головка 122 также выполнена с возможностью извлечения ГНКТ 118 из ствола скважины.
[0016] Установка 100 ГНКТ включает силовой агрегат 124, кабину 126 управления, барабан 120 для ГНКТ, несущую раму 128 (или кран), направляющую дугу 130 для трубы и инжекторную головку 122. Силовой агрегат 124 может представлять собой модуль, который включает в себя гидравлический (-ие) насос (-ы) и возвратный (-ые) бак (-и) (т. е. гидравлический контур) для инжекторной головки 122, а также систему управления направлением инжектора. Кабина 126 управления включает меньшей мере части интеллектуальной системы управления инжектором (как будет дополнительно описано в настоящем документе), компьютер, консоль, сидение, мониторы и/или органы управления.
[0017] Несущая рама 128 поддерживает инжекторную головку 122 на площадке 112 скважины, тогда как направляющая дуга 130 для трубы обеспечивает надлежащий радиус кривизны и опору для ГНКТ 118, сматываемой с барабана 120 и проходящей через инжекторную головку 122. ГНКТ 118 с барабана 120 подают через блок 132 противовыбросовых превенторов и устьевую арматуру 134 для ввода в (или вывода) ствол скважины (или обсадную колонну или другую трубчатую конструкцию внутри ствола скважины) посредством инжекторной головки 122. В некоторых примерах установка 100 ГНКТ позволяет осуществлять добычу природных ресурсов.
[0018] Следует понимать, что реализация вариантов осуществления настоящего описания возможна в сочетании с любой подходящей вычислительной средой, известной в настоящее время или разработанной в будущем. Например, на ФИГ. 2 показана блок-схема системы 200 обработки данных, которую можно использовать для реализации технических приемов, описанных в настоящем документе. В примерах система 200 обработки данных имеет один или более центральных процессоров (процессоров) 221a, 221b, 221c и т. д. (совместно или в общем именуемых процессором (-ами) 221 и/или устройством (-ами) обработки). В аспектах настоящего описания каждый процессор 221 может включать в себя микропроцессор с сокращенным набором команд (RISC). Процессоры 221 соединены с системным запоминающим устройством (например, оперативным запоминающим устройством (ОЗУ) 224) и различными другими компонентами посредством системной шины 33. Постоянное запоминающее устройство (ПЗУ) 222 соединено с системной шиной 233 и может включать в себя базовую систему ввода/вывода (BIOS), которая управляет определенными базовыми функциями системы 200 обработки данных.
[0019] Дополнительно показаны адаптер 227 ввода/вывода и адаптер 226 связи, соединенные с системной шиной 233. Адаптер 227 ввода/вывода может представлять собой адаптер интерфейса малых вычислительных систем (SCSI), который осуществляет обмен данными с жестким диском 223 и/или запоминающим устройством 225 на ленте или любым другим аналогичным компонентом. Адаптер 227 ввода/вывода, жесткий диск 223 и запоминающее устройство 225 на ленте в настоящем документе совместно называются массовым запоминающим устройством 234. Операционная система 240 для работы в системе 200 обработки данных может храниться в массовом запоминающем устройстве 234. Сетевой адаптер 226 соединяет системную шину 233 с внешней сетью 236, что позволяет системе 200 обработки данных обмениваться данными с другими такими системами.
[0020] Дисплей (например, дисплейный монитор) 235 соединен с системной шиной 233 с помощью адаптера 232 дисплея, который может включать в себя графический адаптер для улучшения работы требовательных к графике приложений и видеоконтроллер. В одном аспекте настоящего описания адаптеры 226, 227 и/или 232 могут быть соединены с одной или более шинами ввода/вывода, которые соединены с системной шиной 233 посредством промежуточной шины (не показана). Подходящие шины ввода/вывода для подключения периферийных устройств, таких как контроллеры жестких дисков, сетевые адаптеры и графические адаптеры, обычно включают общие протоколы, такие как «взаимное соединение периферийных компонентов» (PCI). Дополнительные устройства ввода/вывода показаны как подсоединенные к системной шине 233 посредством адаптера 228 пользовательского интерфейса и адаптера 232 дисплея. Клавиатура 229, мышь 230 и динамик 231 могут быть соединены с системной шиной 233 посредством адаптера 228 пользовательского интерфейса, который может включать в себя, например, микросхему Super I/O, объединяющих несколько адаптеров устройств в одну интегральную схему.
[0021] В некоторых аспектах настоящего описания система 200 обработки данных включает в себя графический процессор 237. Графический процессор 237 представляет собой специализированную электронную схему, предназначенную для регулирования и изменения памяти для ускорения создания изображений в кадровом буфере, предназначенном для вывода на дисплей. В общем графический процессор 237 очень эффективен в манипулировании компьютерной графикой и обработке изображений и имеет высокопараллельную структуру, благодаря которой он более эффективен, чем центральные процессоры (ЦП) общего назначения, для алгоритмов, в которых обработка больших блоков данных выполняется параллельно.
[0022] Таким образом, в конфигурации, описанной в настоящем документе, система 200 обработки данных подразумевает возможность обработки данных с использованием процессоров 221, возможность хранения данных с использованием системной памяти (например, ОЗУ 224) и массового запоминающего устройства 234, средства ввода, такие как клавиатура 229 и мышь 230, и возможность вывода с использованием динамика 231 и дисплея 235. В некоторых аспектах настоящего изобретения часть системной памяти (например, ОЗУ 224) и массовое запоминающее устройство 234 совместно хранят операционную систему 240 для координирования функций различных компонентов, показанных в системе 200 обработки данных.
[0023] На ФИГ. 3 показана схема последовательности операций для способа 300 управления установкой 100 ГНКТ на площадке скважины в соответствии с аспектами настоящего описания. Способ 300 может реализовать с помощью любых подходящих систем обработки данных, таких как система 200 обработки данных на ФИГ. 2 или система 400 на ФИГ. 4 (как описано ниже). Хотя установка ГНКТ может представлять собой установку 100 ГНКТ, показанную на ФИГ. 1, установка ГНКТ также может представлять собой другую подходящую установку ГНКТ.
[0024] В блоке 302 система обработки данных (например, система 200 обработки данных) принимает скважинные данные. Скважинные данные можно собирать с помощью датчиков в стволе скважины или на площадке скважины, и/или скважинные данные можно получить от стороннего поставщика, заказчика или другого аналогичного субъекта.
[0025] В блоке 304 система обработки данных генерирует план автоматизированного управления ГНКТ для установки 100 ГНКТ по меньшей мере частично на основе скважинных данных. В соответствии с аспектами настоящего описания план автоматизированного управления ГНКТ определяет скорость подачи ГНКТ, направление и/или усилие для управления установкой 100 ГНКТ. В некоторых примерах скорость подачи, направление и/или усилие устанавливают по-разному для разных значений глубины, так что скорость подачи, направление и/или усилие могут изменяться по мере изменения глубины. Это позволяет установке 100 ГНКТ работать, например, на пластах с различными характеристиками и учитывать изменения глубины и давления. План автоматизированного управления ГНКТ дополнительно описан в настоящем документе.
[0026] В блоке 306 система обработки данных управляет установкой 100 ГНКТ с помощью плана автоматизированного управления ГНКТ. Например, управление установкой 100 ГНКТ может включать спуск ГНКТ в ствол скважины на заданную глубину (спуск в скважину), ожидание в течение периода ожидания (например, в течение которого вводится новая заданная глубина, которая может быть больше текущей глубины или меньше текущей глубины) и подъем ГНКТ из ствола скважины (подъем из скважины). Управление установкой 100 ГНКТ может включать управление гидравлической системой (например, электрогидравлической системой), которая управляет инжекторной головкой 122 и/или другими компонентами установки ГНКТ, такими как клапаны, насосы и т. д. Для управления гидравлической системой можно использовать программируемый логический контроллер для отправки команд, побуждающих исполнительные механизмы в гидравлической системе осуществлять манипуляции с компонентами (например, клапанами, насосами и т. д.) на основе этих команд. В соответствии с аспектами настоящего описания в течение периода ожидания установка 100 ГНКТ может переключаться из автоматизированного режима в ручной режим, чтобы оператор мог вручную управлять установкой 100 ГНКТ.
[0027] В соответствии с аспектами настоящего описания подъем ГНКТ из скважины может включать полное поднятие ГНКТ из ствола скважины или частичное поднятие ГНКТ из ствола скважины. Например, частичное поднятие ГНКТ из ствола скважины можно использовать для проведения процедуры проверки во время спуска ГНКТ в ствол скважины. Процедура проверки может включать остановку спуска в скважину, приподнимание (т. е. изменение направления движения на обратное) ГНКТ (например, на 10 футов, 50 футов, 70 футов, 100 футов, 175 футов и т. д.), измерение массы ГНКТ и затем, в случае подтверждения (например, если масса ГНКТ приблизительно равна ожидаемой массе ГНКТ), продолжение спуска в скважину. Если процедура проверки завершается неудачей, спуск в скважину может быть прерван, оператор может выполнить корректирующее действие, корректирующее действие может быть выполнено автоматически, и т. д.
[0028] Кроме того, могут быть предусмотрены дополнительные процессы. Например, план автоматизированного управления ГНКТ можно корректировать на основе данных датчиков, полученных от датчика (например, датчика давления, датчика температуры, датчика усилия и т. д.) и/или матрицы датчиков, установленной на конце ГНКТ, находящейся в стволе скважины. Это позволяет произвести настройку установки ГНКТ в реальном времени на основе обнаруживаемых датчиками состояний в стволе скважины. Следует понимать, что процессы, показанные на ФИГ. 4, представлены в качестве иллюстраций и что можно добавлять другие процессы или существующие процессы можно удалять, модифицировать или перегруппировывать без отступления от объема и сущности настоящего описания.
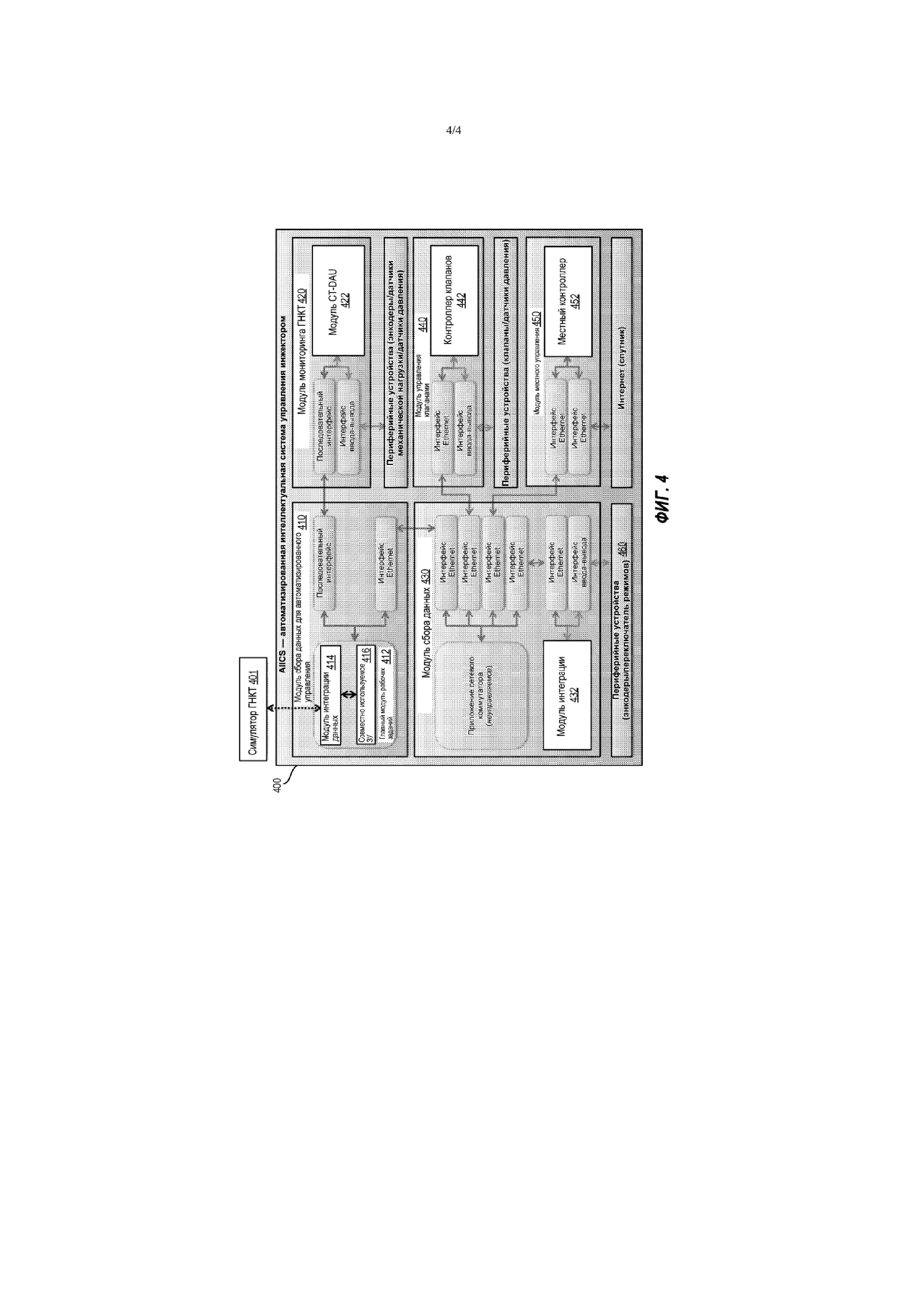
[0029] На ФИГ. 4 показана блок-схема системы 400 управления установкой ГНКТ на площадке скважины в соответствии с аспектами настоящего описания. Система 400, которую можно называть автоматизированной интеллектуальной системой управления инжектором (AIICS), включает различные модули, ответственные за управление и сбор данных, и эти модули соединены друг с другом с возможностью связи, например, как показано в настоящем документе. Установка ГНКТ может представлять собой установку 100 ГНКТ, показанную на ФИГ. 1, или другую подходящую установку ГНКТ.
[0030] Как правило, интеллектуальные системы управления инжектором (IICS) осуществляют низкоуровневое управление гидравлическими контурами, используемыми в работах на площадке скважины. Например, гидравлические контуры можно использовать для изменения давлений насосов и положений клапанов для регулирования потока гидравлической жидкости с целью управления оборудованием в рамках работ на площадке скважины. Система AIICS (например, система 400) может расширить свойства системы IICS путем добавления возможностей автоматического управления скоростью подачи ГНКТ и направлением в установках ГНКТ. Контрольные заданные значения можно определять и преобразовывать в электрические сигналы, которые могут использоваться гидравлическими контурами для изменения давлений насосов и положений клапанов для управления установкой ГНКТ.
[0031] В примере, показанном на ФИГ. 4, система 400 включает модуль 410 сбора данных для автоматизированного управления, модуль 420 мониторинга ГНКТ, шкаф 440 управления клапанами, модуль 430 сбора данных и модуль 450 местного управления. Следует понимать, что в состав системы также можно включать и другие модули/компоненты.
[0032] Модуль 410 сбора данных для автоматизированного управления осуществляет обновление данных моделирования ГНКТ в реальном времени, которые компилируются на основе информации о площадке скважины. Информация о площадке скважины может быть предоставлена, например, третьей стороной и может описывать характеристики оборудования, используемого на площадке скважины.
[0033] Модуль 410 сбора данных для автоматизированного управления содержит главный модуль 412 рабочих заданий, имеющий совместно используемое запоминающее устройство и модуль 414 интеграции данных. Модуль 414 интеграции данных принимает данные моделирования ГНКТ из симулятора 401 ГНКТ. На основе данных по ГНКТ, а также данных, полученных от модуля 420 мониторинга ГНКТ и модуля 440 сбора данных (каждый из которых описан в настоящем документе), модуль 414 интеграции данных определяет заданные значения по безопасности и эксплуатации (например, значения скорости подачи ГНКТ, заданной глубины и т. д.) и выдает предупреждения и сигналы всем операторам/техникам на площадке скважины во время работы установки ГНКТ.
[0034] Например, модуль 414 интеграции данных получает от оператора «заданную глубину». Заданная глубина соответствует требуемой «глубине обработки». Затем модуль 414 интеграции данных выполняет операцию спуска (т. е. спуска в скважину) с проверками массы, обходом препятствий и т. д. до этой заданной глубины (например, 10 000 футов). Как только ГНКТ достигает заданной глубины, модуль 414 интеграции данных автоматически переходит в режим «паузы» и ожидает в течение периода ожидания, чтобы можно было провести обработку. После завершения обработки оператор снова переходит в «активный» режим и вводит другую заданную глубину (например, 0,0 футов). Затем модуль 414 интеграции данных выполняет операцию подъема (т. е. подъема из скважины) с обходом препятствий и т. д.
[0035] Главный модуль 412 рабочих заданий выступает в качестве контроллера связи (например, главного устройства Modbus TCP/IP) и выполняет функции сбора данных в реальном времени для сбора данных о рабочем задании из различных модулей системы 400. Главный модуль 412 рабочих заданий может использовать, например, подсистему Ethernet, а также может формировать коммуникационный интерфейс для подключения к модулю 420 мониторинга ГНКТ посредством последовательных интерфейсов в каждом модуле. Главный модуль 412 рабочих заданий использует интерфейс с совместно используемой памятью для связи с модулем 414 интеграции данных. Этот интерфейс позволяет модулю интеграции данных получать доступ к различным данным/параметрам, которые регистрируются главным модулем 412 рабочих заданий.
[0036] Модуль 410 сбора данных для автоматизированного управления также может включать интерфейс (-ы) (например, последовательный интерфейс, интерфейс Ethernet, интерфейс ввода/вывода и т. д.) для соединения с возможностью связи модуля 410 сбора данных для автоматизированного управления с другими модулями, такими как, среди прочего, модуль 420 мониторинга ГНКТ и/или модуль 440 сбора данных.
[0037] Модуль 420 мониторинга ГНКТ осуществляет мониторинг установки ГНКТ (например, установки 100 ГНКТ) и собирает относящиеся к установке данные в реальном времени. Модуль 420 мониторинга ГНКТ содержит модуль 422 блока сбора данных ГНКТ (CT-DAU) и может также включать интерфейс (-ы) (например, последовательный интерфейс, интерфейс Ethernet, интерфейс ввода/вывода и т. д.) для соединения с возможностью связи модуля 420 мониторинга ГНКТ с другими модулями, такими как, среди прочего, модуль 410 сбора данных для автоматизированного управления и/или периферийные устройства (например, энкодеры, датчики механической нагрузки, датчики давления и т. д.). Периферийные устройства представляют собой устройства, связанные с установкой ГНКТ (например, установкой ГНКТ), которые предоставляют данные, например, модулю 420 мониторинга ГНКТ посредством интерфейса ввода/вывода.
[0038] Модуль CT-DAU 422 выполняет обновления в реальном времени для результатов измерений периферийных устройств, включая результаты измерений от двойного энкодера (служит для расчета глубины, на которую ГНКТ опустилась в скважину) и датчика механической нагрузки (служит для расчета массы, приложенной к ГНКТ). Требования к обратной связи для модуля CT-DAU 422 могут изменяться в зависимости от планирования рабочего задания для ГНКТ и могут включать больший объем обратной связи для регистрации и анализа данных.
[0039] Модуль 430 сбора данных содержит модуль 432 интеграции и может также включать интерфейс (-ы) (например, последовательный интерфейс, интерфейс Ethernet, интерфейс ввода/вывода и т. д.) для соединения с возможностью связи модуля 430 сбора данных с другими модулями, такими как модуль 410 сбора данных для автоматизированного управления, модуль 440 управления клапанами, модуль 450 местного правления и т. д. Модуль 430 сбора данных может также включать приложение сетевых коммутаторов для управления передачами данных через интерфейсы. Модуль 432 интеграции выполняет обновления в реальном времени для результатов измерений периферийных устройств, таких как избыточное вычисление глубины по результатам измерений двойного энкодера, и выполняет функцию контроллера связи (например, главного устройства Modbus TCP/IP) для управления потоком управляющих команд.
[0040] Модуль 440 управления клапанами осуществляет низкоуровневое управление давлениями инжектора и тягового усилия для выполнения ограничений по массе оборудования, задаваемых модулем 414 интеграции данных. Технические приемы настоящего изобретения обеспечивают управление скоростью, направлением и натяжением для установки 100 ГНКТ. Заданные значения глубины и скорости подачи ГНКТ, предоставляемые модулем 414 интеграции данных, спецификацией оборудования и конструкцией гидравлического контура, используют для разработки функциональных возможностей, применяемых для низкоуровневого управления. Модуль 440 управления клапанами содержит контроллер 442 клапанов и может также включать интерфейс (-ы) (например, последовательный интерфейс, интерфейс Ethernet, интерфейс ввода/вывода и т. д.) для соединения с возможностью связи модуля 440 управления клапанами с другими модулями, такими как, среди прочего, модуль 430 сбора данных и/или периферийные устройства (например, энкодеры, датчики механической нагрузки, датчики давления и т. д.).
[0041] Модуль 450 местного управления включает в себя местный контроллер 452, который выполняет функцию контроллера связи (например, главное устройство Modbus TCP/IP) и используется для ввода параметров калибровки для периферийных устройств, просмотра диагностической информации и выполнения функций управления при тестировании установки 100 ГНКТ до включения автоматизированного управления. Модуль 440 местного управления может также включать интерфейс (-ы) (например, последовательный интерфейс, интерфейс Ethernet, интерфейс ввода/вывода и т. д.) для соединения с возможностью связи модуля 450 местного управления с другими модулями, такими как модуль 430 сбора данных и/или для сетевого соединения (например, к Интернету, подключение к спутниковой связи, подключение к широкополосной связи и т. д.).
[0042] Система 400 может быть выполнена с возможностью генерирования плана автоматизированного управления ГНКТ и управления установкой 100 ГНКТ с помощью плана автоматизированного управления ГНКТ, как описано со ссылкой на ФИГ. 3. В соответствии с аспектами настоящего описания возможны различные планы автоматизированного управления ГНКТ (т. е. интегрированные процедуры управления). Например, планы автоматизированного управления ГНКТ могут определять различные процедуры готовности, процедуры режима автоматизированного управления и процедуры режима местного управления. Эти процедуры описаны ниже, хотя следует понимать, что процедуры являются лишь примерами и что также возможны и другие процедуры, их модификации и/или комбинации.
[0043] Примеры процедур готовности могут включать процедуру готовности режима автоматизированного управления, процедуру готовности режима местного управления, процедуру готовности режима ручного управления с активной системой IICS и процедуру готовности режима ручного управления. Модуль 432 интеграции считывает входные сигналы от переключателя режимов периферийных устройств 460 и определяет, какой из режимов автоматизированного или местного (т. е. ручного) управления необходимо привести в состояние готовности. В режимах автоматизированного и местного управления для начала работы установки 100 ГНКТ используется дополнительный сигнал, как описано ниже. В режимах ручного управления процедуру запуска можно использовать или не использовать.
[0044] Процедура готовности режима автоматизированного управления реализуется, когда переключатель режимов находится в положении режима автоматизированного управления. Модуль 432 интеграции считывает входной сигнал режима автоматизированного управления от переключателя режимов и посылает в главный модуль 412 рабочих заданий предупреждающий сигнал режима автоматизированного управления. Модуль 414 интеграции данных считывает предупреждающий сигнал из главного модуля 412 рабочих заданий и конфигурируется для работы в режиме автоматизированного управления. Модуль 432 интеграции проверяет, чтобы не было результатов измерений или элементов управления периферийных устройств, которые находились бы в небезопасном состоянии для перехода на автоматизированное управление. Если определено, что какой-либо результат измерения или элемент управления периферийных устройств находится в небезопасном состоянии, модуль 432 интеграции отправляет сигнал об общей ошибке низкого уровня. Однако в случае, если продолжение действий является безопасным, модуль 432 интеграции посылает сигнал готовности в главный модуль 412 рабочих заданий. Модуль 414 интеграции данных считывает сигнал готовности от главного модуля 412 рабочих заданий. Процедура готовности режима автоматизированного управления также может выполняться как фоновая задача, во время которой контроллер 442 клапанов поддерживает стандартное безопасное давление для гидравлической (-их) системы (систем) в установке 100 ГНКТ с помощью обновлений в реальном времени на основе данных измерений периферийных устройств и данных, предоставленных главным модулем 412 рабочих заданий. Модуль 414 интеграции данных выполняет обновления данных в реальном времени (например, результаты измерений периферийных устройств, элементы автоматизированного управления и обратную связь и т. д.) с помощью обновленных выборок из совместно используемого запоминающего устройства 416 главного модуля 412 рабочих заданий. Главный модуль 412 рабочих заданий выполняет обновления в реальном времени аспектов контроллера связи главного модуля 412 рабочих заданий и других интерфейсов (например, последовательного интерфейса, интерфейса Ethernet и т. д.) модуля 410 сбора данных для автоматизированного управления. Модуль 422 сбора данных ГНКТ выполняет обновления в реальном времени результатов измерений периферийных устройств и регистров вывода.
[0045] Процедура готовности режима местного управления реализуется, когда переключатель режимов находится в положении режима местного (т. е. ручного) управления. Модуль 432 интеграции считывает входной сигнал режима местного управления от переключателя режимов периферийных устройств 460 и посылает предупреждающий сигнал режима местного управления в главный модуль 412 рабочих заданий. Модуль 414 интеграции данных считывает предупреждающий сигнал из главного модуля 412 рабочих заданий и конфигурируется для работы в режиме местного управления. Модуль 432 интеграции проверяет, чтобы не было результатов измерений или элементов управления периферийных устройств, которые находились бы в небезопасном состоянии для перехода на местное управление. Если определено, что какой-либо результат измерения или элемент управления периферийных устройств находится в небезопасном состоянии, модуль 432 интеграции отправляет сигнал об общей ошибке низкого уровня. Однако в случае, если продолжение действий является безопасным, модуль 432 интеграции посылает сигнал готовности местному контроллеру 452. Местный контроллер 452 считывает сигнал готовности от модуля 432 интеграции. Процедура готовности режима местного управления также может выполняться как фоновая задача, во время которой контроллер 442 клапанов поддерживает стандартное безопасное давление для гидравлической (-их) системы (систем) в установке 100 ГНКТ с помощью обновлений в реальном времени на основе данных измерений периферийных устройств и данных, предоставленных главным модулем 412 рабочих заданий. Модуль 414 интеграции данных выполняет обновления данных в реальном времени (например, результаты измерений периферийных устройств, элементы автоматизированного управления и обратную связь и т. д.) с помощью обновленных выборок из совместно используемого запоминающего устройства 416 главного модуля 412 рабочих заданий. Главный модуль 412 рабочих заданий выполняет обновления в реальном времени аспектов контроллера связи главного модуля 412 рабочих заданий и других интерфейсов (например, последовательного интерфейса, интерфейса Ethernet и т. д.) модуля 410 сбора данных для автоматизированного управления. Модуль 422 сбора данных ГНКТ выполняет обновления в реальном времени результатов измерений периферийных устройств и регистров вывода.
[0046] Процедура готовности режима местного управления с активной системой IICS реализуется, когда переключатель режимов находится в положении режима ручного управления с активной системой IICS. Модуль 432 интеграции считывает входной сигнал режима ручного управления с активной системой IICS от переключателя режимов периферийных устройств 460 и посылает предупреждающий сигнал режима ручного управления с активной системой IICS в главный модуль 412 рабочих заданий. Модуль 414 интеграции данных считывает предупреждающий сигнал из главного модуля 412 рабочих заданий и конфигурируется для работы в режиме ручного управления с активной системой IICS. Модуль 432 интеграции проверяет, чтобы не было результатов измерений или элементов управления периферийных устройств, которые находились бы в небезопасном состоянии для перехода на местное управление. Если определено, что какой-либо результат измерения или элемент управления периферийных устройств находится в небезопасном состоянии, модуль 432 интеграции отправляет сигнал об общей ошибке низкого уровня. Однако в случае, если продолжение действий является безопасным, модуль 432 интеграции передает управление стандартным давлением для инжекторной головки, тяговым усилием и давлением натяжения, например, оператору. Процедура готовности режима ручного управления с активной системой IICS также может выполняться как фоновая задача, во время которой контроллер 442 клапанов поддерживает стандартное безопасное давление для гидравлической (-их) системы (систем) в установке 100 ГНКТ с помощью обновлений в реальном времени на основе данных измерений периферийных устройств и данных, предоставленных главным модулем 412 рабочих заданий. Модуль 414 интеграции данных выполняет обновления данных в реальном времени (например, результаты измерений периферийных устройств, элементы автоматизированного управления и обратную связь и т. д.) с помощью обновленных выборок из совместно используемого запоминающего устройства 416 главного модуля 412 рабочих заданий. Главный модуль 412 рабочих заданий выполняет обновления в реальном времени аспектов контроллера связи главного модуля 412 рабочих заданий и других интерфейсов (например, последовательного интерфейса, интерфейса Ethernet и т. д.) модуля 410 сбора данных для автоматизированного управления. Модуль 422 сбора данных ГНКТ выполняет обновления в реальном времени результатов измерений периферийных устройств и регистров вывода.
[0047] Процедура готовности режима местного управления реализуется, когда переключатель режимов находится в положении режима ручного управления. Модуль 432 интеграции считывает входной сигнал режима ручного управления от переключателя режимов периферийных устройств 460 и посылает предупреждающий сигнал режима ручного управления в главный модуль 412 рабочих заданий. Модуль 414 интеграции данных считывает предупреждающий сигнал из главного модуля 412 рабочих заданий и конфигурируется для работы в режиме ручного управления. Модуль 432 интеграции проверяет, чтобы не было результатов измерений или элементов управления периферийных устройств, которые находились бы в небезопасном состоянии для перехода на местное управление. Если определено, что какой-либо результат измерения или элемент управления периферийных устройств находится в небезопасном состоянии, модуль 432 интеграции отправляет сигнал об общей ошибке низкого уровня. Однако модуль 450 местного управления может реализовать блокировку автоматики для вмешательства с целью устранения ошибки и продолжения работы в ручном режиме. Если продолжение действий является безопасным, модуль 432 интеграции передает управление стандартным давлением для инжекторной головки, тяговым усилием и давлением натяжения, например, оператору. Процедура готовности режима ручного управления также может выполняться как фоновая задача, во время которой модуль 432 интеграции выполняет обновления в реальном времени результатов измерений периферийных устройств и следит за текущим режимом работы. Модуль 414 интеграции данных выполняет обновления данных в реальном времени (например, результаты измерений периферийных устройств, элементы автоматизированного управления и обратную связь и т. д.) с помощью обновленных выборок из совместно используемого запоминающего устройства 416 главного модуля 412 рабочих заданий. Главный модуль 412 рабочих заданий выполняет обновления в реальном времени аспектов контроллера связи главного модуля 412 рабочих заданий и других интерфейсов (например, последовательного интерфейса, интерфейса Ethernet и т. д.) модуля 410 сбора данных для автоматизированного управления. Модуль 422 сбора данных ГНКТ выполняет обновления в реальном времени результатов измерений периферийных устройств и регистров вывода.
[0048] Примеры процедур режима автоматизированного управления могут включать в себя процедуру активации, процедуру паузы, процедуру обработки отказа, процедуру контроля проверки массы и процедуру управления обходом препятствий.
[0049] Процедура активации происходит, когда оператор проверяет, установлены ли регулировки вспомогательного клапана инжектора и средства управления направлением в соответствующее положение, чтобы можно было приступить к автоматизированному управлению в соответствии с процедурами эксплуатации. Оператор инициирует изменение в модуле 414 интеграции данных с паузы на активное состояние. Модуль 414 интеграции данных посылает сигнал активного состояния в главный модуль 412 рабочих заданий, который затем посылает сигнал активного состояния в модуль 432 интеграции. Модуль 432 интеграции посылает сигнал скорости подачи ГНКТ и глубины от модуля 432 интеграции в контроллер 442 клапанов, который реализует скорость подачи трубы и использует сигнал глубины, выданный модулем 432 интеграции. Контроллер 442 клапанов отслеживает максимальные пределы тянущего и толкающего усилий установки 100 ГНКТ, которые определяются модулем 414 интеграции данных. Модуль 414 интеграции данных использует обновления в реальном времени для предоставления значения заданной глубины, на которой необходимо провести следующую проверку массы (т. е. процедуру проверки) или на которой ожидается препятствие, а также рекомендаций по скорости подачи трубы. Это позволяет осуществлять автоматизированный спуск ГНКТ в скважину.
[0050] Процедура паузы происходит, когда оператор инициирует изменение в модуле 414 интеграции данных с активного состояния на паузу. В соответствии с аспектами настоящего описания это может происходить автоматически по окончании спуска в скважину и может происходить в течение периода ожидания, как описано в настоящем документе. Модуль 414 интеграции данных посылает сигнал паузы в главный модуль 412 рабочих заданий, который отправляет сигнал паузы в модуль 432 интеграции. Модуль 432 интеграции прекращает передачу сигнала скорости подачи трубы и глубины от модуля 414 интеграции данных в контроллер 442 клапанов и устанавливает скорость подачи на ноль, фактически останавливая работу установки 100 ГНКТ.
[0051] Процедура обработки отказа начинается, когда модуль 432 интеграции обнаруживает состояние отказа, как описано в настоящем документе. Модуль 432 интеграции посылает сигнал об общей ошибке низкого уровня в главный модуль 412 рабочих заданий. Модуль 414 интеграции данных считывает сигнал об общей ошибке низкого уровня из главного модуля 412 рабочих заданий. Модуль 432 интеграции прекращает передачу сигнала скорости подачи трубы и глубины от модуля 414 интеграции данных в контроллер 442 клапанов и устанавливает скорость подачи на ноль. Модуль 414 интеграции также посылает сигнал неготовности в главный модуль 412 рабочих заданий, и модуль 432 интеграции данных остается в состоянии неготовности до тех пор, пока состояние отказа не будет устранено/разрешено.
[0052] Процедура контроля проверки массы (или процедура проверки) начинается, когда модуль 414 интеграции данных считывает глубину, которая соответствует глубине следующей проверки массы. Модуль 414 интеграции данных устанавливает скорость подачи ГНКТ на ноль, а контроллер 442 клапанов снижает скорость подачи до нуля по мере приближения ГНКТ к заданной глубине. Модуль 414 интеграции данных ожидает, пока обратная связь по скорости подачи от главного модуля 412 рабочих заданий не станет равной нулю, а затем устанавливает глубину на значение, равное текущей глубине за вычетом расстояния вытягивания. Контроллер 442 клапанов меняет направление движения клапана со спуска в скважину на подъем из скважины, увеличивает скорость подачи, а затем уменьшает скорость подачи до нуля по мере приближения ГНКТ к заданному расстоянию вытягивания. Модуль 414 интеграции данных ожидает, пока обратная связь по скорости подачи от главного модуля 412 рабочих заданий не станет равной нулю, ожидает в течение заданного времени стабилизации результата измерения массы, затем сравнивает результат измерения массы с ожидаемым результатом проверки массы. Если результаты не коррелируют с ожидаемым результатом проверки массы, модуль 414 интеграции данных выдает ошибку, а автоматизированное управление принудительно переводится в состояние паузы. Однако в случае, если проверка массы проходит в соответствии с ожидаемым, контроллер 442 клапанов далее увеличивает скорость подачи трубы и переходит к следующей глубине.
[0053] Последовательность управления обходом препятствий начинается, когда модуль 414 интеграции данных считывает начальную глубину, на которой ожидаются препятствия (например, изменения в пласте и т. д.). Модуль 414 интеграции данных устанавливает скорость подачи ГНКТ на рекомендованную скорость для обходимого препятствия. Контроллер 442 клапанов снижает скорость подачи трубы до рекомендованной. Если не удается достичь конечной глубины препятствия, модуль 414 интеграции данных выдает ошибку, и автоматизированное управление принудительно переводится в состояние паузы. Однако в случае, если препятствие удается обойти, контроллер 442 клапанов увеличивает скорость подачи трубы до скорости, рекомендуемой модулем 414 интеграции данных.
[0054] Примеры процедур режима местного управления могут включать в себя процедуру запуска, процедуру остановки, процедуру обработки отказа и процедуру выбора расчета глубины.
[0055] В начале процедуры запуска оператор проверяет установку регулировок вспомогательного клапана инжектора и средств управления направлением в соответствующее положение, чтобы можно было приступить к автоматизированному управлению в соответствии с процедурами эксплуатации. После инициирования процедуры запуска местный контроллер 452 посылает сигнал запуска в модуль 432 интеграции, который посылает сигнал скорости подачи ГНКТ и глубины от местного контроллера 452 в контроллер 442 клапанов. Контроллер 442 клапанов увеличивает скорость подачи трубы и использует сигнал глубины, выданный модулем 432 интеграции. Модуль 432 интеграции посылает сигнал действия в местный контроллер 452 и отслеживает максимальные пределы тянущего и толкающего усилий, выданные модулем 414 интеграции данных. Оператор может необязательно прибегнуть к блокировке автоматики для обхода пределов посредством местного контроллера 452.
[0056] Последовательность остановки начинается, когда оператор выбирает опцию останова с помощью местного контроллера 452. Местный контроллер 452 посылает сигнал останова в модуль 432 интеграции, который прекращает передачу сигнала скорости подачи трубы и глубины от местного контроллера 452 в контроллер 442 клапанов и устанавливает скорость подачи на ноль. Контроллер 442 клапанов снижает скорость подачи трубы до нуля, а модуль 432 интеграции посылает сигнал бездействия в местный контроллер 452.
[0057] Процедура обработки отказа инициируется, когда модуль 432 интеграции обнаруживает отказ. Модуль 432 интеграции посылает сигнал отказа в местный контроллер 452 и прекращает передачу сигнала скорости подачи трубы и глубины от местного контроллера 452 в контроллер 442 клапанов и устанавливает скорость подачи на ноль. Контроллер 442 клапанов снижает скорость подачи ГНКТ до нуля. Модуль 432 интеграции посылает сигнал бездействия в местный контроллер 452, и местный контроллер 452 можно перезапустить после инициирования сброса и/или устранения состояния отказа.
[0058] Процедура выбора расчета глубины начинается, когда оператор инициирует расчет глубины посредством местного контроллера 452. Местный контроллер 452 посылает сигнал выбора расчета глубины в модуль 432 интеграции. С помощью сигнала выбора расчета глубины модуль 432 интеграции выбирает расчетную глубину от модуля 422 сбора данных ГНКТ, когда значение глубины передается в модуль 414 интеграции данных для расчета заданных значений для автоматизации (например, значения скорости подачи ГНКТ, заданной глубины и т. д.).
[0059] Следует понимать, что каждая из этих процедур может быть частично и/или полностью реализована в виде плана автоматизированного управления ГНКТ. Следует также понимать, что план автоматизированного управления ГНКТ может включать в себя любое подходящее количество и комбинацию этих процедур.
[0060] Вариант осуществления 1. Способ, реализованный с применением компьютера, для управления установкой ГНКТ на площадке скважины, включающий: прием скважинных данных с помощью устройства обработки; генерирование устройством обработки плана автоматизированного управления ГНКТ для установки ГНКТ по меньшей мере частично на основе скважинных данных; и управление установкой ГНКТ с помощью устройства обработки с использованием плана автоматизированного управления ГНКТ для спуска ГНКТ в ствол скважины на площадке скважины на заданную глубину, ожидания в течение периода ожидания и подъема ГНКТ из ствола скважины.
[0061] Вариант осуществления 2. Способ по меньшей мере по одному из предшествующих вариантов осуществления, в котором управление установкой ГНКТ включает управление гидравлической системой, которая управляет инжекторной головкой установки ГНКТ.
[0062] Вариант осуществления 3. Способ по меньшей мере по одному из предшествующих вариантов осуществления, в котором план автоматизированного управления ГНКТ задает скорость подачи ГНКТ, направление и усилие для управления установкой ГНКТ.
[0063] Вариант осуществления 4. Способ по меньшей мере по одному из предшествующих вариантов осуществления, в котором скорость подачи ГНКТ, направление движения и усилие устанавливают по-разному для разных значений глубины.
[0064] Вариант осуществления 5. Способ по меньшей мере по одному из предшествующих вариантов осуществления, в котором подъем ГНКТ из ствола скважины на площадке скважины включает одно из полного поднятия ГНКТ из ствола скважины или частичного поднятия ГНКТ из ствола скважины.
[0065] Вариант осуществления 6. Способ по меньшей мере по одному из предшествующих вариантов осуществления, в котором конец ГНКТ в стволе скважины содержит датчик, причем план автоматизированного управления ГНКТ по меньшей мере частично обновляется на основе данных, полученных от датчика.
[0066] Вариант осуществления 7. Способ по меньшей мере по одному из предшествующих вариантов осуществления, в котором в ходе управления установкой ГНКТ с помощью плана автоматизированного управления ГНКТ в процессе спуска ГНКТ в ствол скважины осуществляется процедура проверки.
[0067] Вариант осуществления 8. Способ по меньшей мере по одному из предшествующих вариантов осуществления, дополнительно включающий предоставление оператору возможности управления установкой ГНКТ в течение периода ожидания.
[0068] Вариант осуществления 9. Способ по меньшей мере по одному из предшествующих вариантов осуществления, в котором план автоматизированного управления ГНКТ определяет по меньшей мере одну из процедуры готовности, процедуры режима автоматизированного управления и процедуры режима местного управления.
[0069] Вариант осуществления 10. Система управления установкой ГНКТ на площадке скважины, содержащая: запоминающее устройство, содержащее машиночитаемые команды; и устройство обработки для выполнения машиночитаемых команд для осуществления способа, включающего: прием данных с помощью устройства обработки; генерирование устройством обработки плана автоматизированного управления ГНКТ для установки ГНКТ по меньшей мере частично на основе этих данных, причем план автоматизированного управления ГНКТ содержит множество заданных значений; и управление установкой ГНКТ с помощью устройства обработки с использованием плана автоматизированного управления ГНКТ путем применения множества заданных значений во время выполнения операции.
[0070] Вариант осуществления 11. Система по меньшей мере по одному из предшествующих вариантов осуществления, в которой по меньшей мере одно из множества заданных значений определяет скорость подачи ГНКТ для управления установкой ГНКТ.
[0071] Вариант осуществления 12. Система по меньшей мере по одному из предшествующих вариантов осуществления, в которой по меньшей мере одно из множества заданных значений определяет заданную глубину для управления установкой ГНКТ.
[0072] Вариант осуществления 13. Система по меньшей мере по одному из предшествующих вариантов осуществления, в которой по меньшей мере одно из множества заданных значений определяет усилие для управления установкой ГНКТ.
[0073] Вариант осуществления 14. Система по меньшей мере по одному из предшествующих вариантов осуществления, в котором управление установкой ГНКТ включает управление гидравлической системой, которая управляет инжекторной головкой установки ГНКТ.
[0074] Вариант осуществления 15. Система по меньшей мере по одному из предшествующих вариантов осуществления, в котором конец ГНКТ в стволе скважины содержит датчик, причем план автоматизированного управления ГНКТ по меньшей мере частично обновляется на основе данных, полученных от датчика.
[0075] Вариант осуществления 16. Система по меньшей мере по одному из предшествующих вариантов осуществления, дополнительно содержащая извлечение углеводородов из ствола скважины с помощью установки ГНКТ.
[0076] Вариант осуществления 17. Система по меньшей мере по одному из предшествующих вариантов осуществления, в которой операция выбрана из группы, состоящей из операции спуска в скважину и операции подъема из скважины.
[0077] Использование форм единственного и множественного числа и аналогичных отсылок в контексте описания настоящего изобретения (особенно в контексте представленной ниже формулы изобретения) следует понимать как охватывающее как единственное, так и множественное число, если в настоящем документе не указано иное или если это явно не противоречит контексту. Кроме того, следует также отметить, что термины «первый», «второй» и т. п. в настоящем документе не означают какой-либо порядок, количество или важность, а используются для различения одного элемента от другого. Модификатор «около», используемый в связи с каким-либо количеством, включает в себя указанную величину и имеет значение, определяемое контекстом (например, он включает степень ошибки, связанной с измерением определенного количества).
[0078] Идеи, представленные в настоящем описании, можно использовать в множестве разнообразных операций на скважине. Эти операции могут включать использование одного или более средств обработки для обработки пласта, текучих сред, находящихся в пласте, ствола скважины и/или оборудования в стволе скважины, такого как эксплуатационные насосно-компрессорные трубы. Средства обработки могут находиться в форме жидкостей, газов, твердых веществ, полутвердых веществ и их смесей. Примеры средств обработки включают, без ограничений, гидроразрывные жидкости, кислоты, пар, воду, солевой раствор, антикоррозионные средства, цемент, модификаторы проницаемости, буровые растворы, эмульгаторы, деэмульгаторы, индикаторы, противотурбулентные присадки и т. д. Примеры операций на скважине включают, без ограничений, гидравлический разрыв пласта, возбуждение притока в скважину, закачивание индикаторов, очистку, кислотную обработку, нагнетание пара, заводнение, цементирование и т. д.
[0079] Хотя в настоящем описании приведены ссылки на пример осуществления или примеры осуществления, специалистам в данной области будет понятно, что допускается внесение различных изменений и замена отдельных элементов на эквивалентные без отступления от объема настоящего описания. Кроме того, допускается внесение множества модификаций для адаптации сущности настоящего описания к конкретной ситуации или материалу без отступления от его существенного объема. Таким образом, предполагается, что настоящее описание не ограничивается конкретным вариантом осуществления, описанным как наилучший вариант реализации, предусмотренный для осуществления настоящего описания, но предполагается, что настоящее описание включает в себя все варианты осуществления, входящие в объем формулы изобретения. Кроме того, в графических материалах и описании представлены примеры осуществления настоящего описания, и, хотя могли быть использованы конкретные термины, если не указано иное, они используются только в общем и описательном смысле, а не в целях ограничения, и это не ограничивает объем настоящего описания.
Реферат
Группа изобретений относится к способу и системе для управления установкой гибких насосно-компрессорных труб (ГНКТ) на площадке скважины. Технический результат заключается в повышении эффективности управления установкой ГНКТ. Способ, реализованный с применением компьютера, для управления установкой ГНКТ на площадке скважины, имеющей ствол скважины, включает: создание устройством обработки модели ГНКТ для выполнения операции ГНКТ; прием скважинных данных с помощью устройства обработки, причем скважинные данные содержат поверхностные данные, собранные с помощью по меньшей мере поверхностного датчика на площадке скважины, и внутрискважинные данные, собранные с помощью по меньшей мере внутрискважинного датчика в стволе скважины; генерирование устройством обработки плана автоматизированного управления ГНКТ для установки ГНКТ по меньшей мере частично на основе скважинных данных и модели ГНКТ; управление установкой ГНКТ с помощью устройства обработки с использованием плана автоматизированного управления ГНКТ для спуска ГНКТ в ствол скважины на площадке скважины на заданную глубину, ожидания в течение периода ожидания и подъема ГНКТ из ствола скважины; и корректировку устройством обработки плана автоматизированного управления ГНКТ по меньшей мере частично на основе обнаруженного датчиком состояния во время управления установкой ГНКТ. В ходе управления установкой ГНКТ с помощью плана автоматизированного управления ГНКТ в процессе спуска ГНКТ в ствол скважины осуществляется процедура проверки, включающая: остановку спуска ГНКТ в ствол скважины; перемещение ГНКТ в обратном направлении на заданное расстояние; измерение массы ГНКТ; и определение, соответствует ли масса ГНКТ ожидаемой массе. 2 н. и 12 з.п. ф-лы, 4 ил.
Комментарии