Способ определения свойств блока установки для ремонта скважин путем оценки данных установки - RU2412329C2
Код документа: RU2412329C2
Чертежи







Описание
Область техники, к которой относится изобретение
Область техники настоящего изобретения, в общем, относится к оценке данных, относящихся к техническому обслуживанию скважин для добычи углеводородов, и, более конкретно, к оценке данных, полученных на компьютеризированной установке для капитального ремонта скважин, выполненной с возможностью записи и передачи данных, относящихся к положению и скорости блока во время работы буровой установки на буровой площадке.
Уровень техники
После того как буровая установка, выполняющая бурение нефтяных скважин, пробурит скважину и установит обсадную трубу скважины, буровую установку демонтируют и увозят с буровой площадки. Начиная с этого момента, для технического обслуживания скважины обычно используют передвижной ремонтный модуль или установку для ремонта скважин. Обслуживание включает в себя, например, установку и удаление внутренней колонны насосно-компрессорных труб, насосных штанг и насосов. Обычно это выполняется с помощью системы канатного подъемника, которая включает в себя талевый блок, который поднимает и опускает упомянутые выше колонны насосно-компрессорных труб, насосные штанги и насосы.
Для обычных систем описаны способы мониторинга движения талевого блока буровой установки. В этих обычных системах талевый блок можно поднимать или опускать за пределы границ безопасности. Это называется "подъемом выше верхней рамы", если талевый блок перемещается выше его самого верхнего безопасного положения, и "выходом ниже пола", если он перемещается ниже своего самого нижнего безопасного положения. Перемещение выше верхней рамы/ниже пола может привести к повреждению оборудования и/или представляет опасность для персонала, работающего с оборудованием. Поскольку оператор системы канатного подъемника часто не в состоянии видеть положение талевого блока, или в связи с тем, что оператор может быть по какой-либо причине отвлечен от слежения за положением талевого блока, он может по неосторожности превысить безопасные положения талевого блока.
Хотя установлено множество обычных способов для решения проблем опасной работы канатного подъемника на буровой установке для бурения нефтяных скважин, множество недостатков все еще остаются при применении этих технологий в установке для ремонта скважин. Например, во многих случаях оператор не может видеть блок, и он должен обладать способностью принимать решения на основе местоположения блока, фактически не видя этот блок. Кроме того, лица, производящие оценку, такие как контролеры, владельцы установок для ремонта скважин или владельцы скважин, должны иметь способ оценки эффективности действий оператора буровой установки, и для владельцев скважин должен существовать способ оценки эффективности действий оператора буровой установки и безопасности в отношении положения блока во время работы буровой установки.
Настоящее изобретение направлено на оценку положения блока по отображению данных положения блока и путем определения, следует ли продолжить подъем или опускание блока, на основе отображаемых данных. Кроме того, настоящее изобретение направлено на способ оценки данных положения блока и кодер данных скорости, для определения действий, которые выполняются в установке для ремонта скважин, и скорости, с которой блок работал на установке для ремонта скважин.
Сущность изобретения
Настоящее изобретение направлено на оценку данных положения блока и данных скорости кодера установки для ремонта скважин на буровой площадке. В изобретении предусматривается, что данные можно оценивать для определения действий, которые требуется предпринять в отношении подъема и опускания блока, для определения скорости блока и определения действий, выполняемых на установке для ремонта скважин, либо в режиме реального времени, или на основе данных оценки, полученных после работы. Данные могут быть переданы на буровую установку и в другое удаленное место в режиме, близком к режиму реального времени, или периодически по проводным, беспроводным, спутниковым каналам передачи данных или путем физической пересылки, например, модуля памяти в центр обработки и хранения данных, предпочтительно управляемый владельцем установки для ремонта скважин, но, в качестве альтернативы, управляемый владельцем скважины или другой третьей стороной.
В одном аспекте настоящего изобретения способ определения действий, выполненных установкой для ремонта скважин, может включать в себя следующее: оценивают отображение данных положения блока на графике данных положения блока. Оператор установки для ремонта скважин, контролер или третья сторона может идентифицировать множество точек в данных положения блока по графику данных положения блока, в качестве первого действия. После того как первое действие будет идентифицировано в данных графика данных положения блока, первое действие может быть определено путем оценки множества точек данных среди данных положения блока. В одном примерном варианте воплощения множество данных положения блока может включать в себя множество пиков и впадин вдоль кривой, которая может представлять собой положение блока.
В другом аспекте настоящего изобретения способ работы блока на установке для ремонта скважин, путем анализа графика данных положения блока, может включать в себя следующее: оценивают первую точку данных на графике данных положения блока. Способ также может включать в себя следующее: оценивают, извлек ли блок трубу из скважины. Если блок не полностью извлек трубу из скважины, можно определить, находится ли первая точка данных, по существу, близко к верхнему пределу графика данных положения блока. Удаление трубы можно остановить, если первая точка данных располагается, по существу, близко к верхнему предельному значению на графике данных положения блока. Кроме того, может быть разрешено продолжить подъем трубы из скважины с помощью блока, если первая точка данных не находится, по существу, близко к верхнему пределу графика данных положения блока.
В еще одном аспекте настоящего изобретения способ работы блока на установке для ремонта скважин, путем анализа графика данных положения блока, может включать в себя следующее: выполняют оценку первой точки данных на графике данных положения блока. Способ также может включать в себя следующее: определяют, поднял ли блок трубу на достаточную высоту, так, что она может быть вставлена в скважину. Если блок не поднял трубу достаточно высоко так, чтобы ее можно было вставить в скважину, может быть определено, находится ли первая точка данных в достаточной степени близко к верхнему пределу графика данных положения блока. Извлечение трубы может быть остановлено, если первая точка данных находится, по существу, близко к верхнему пределу графика данных положения блока. Кроме того, может быть разрешено продолжение подъема блоком трубы в достаточно высокое положение, чтобы ее можно было вставить в скважину, если первая точка данных не находится, по существу, близко к верхнему предельному положению графика данных положения блока.
В дополнительном аспекте настоящего изобретения способ работы блока установки для ремонта скважин, путем анализа графика данных положения блока, может включать в себя следующее: выполняют оценку первой точки данных на графике данных положения блока. Способ также может включать в себя следующее: определяют, вставил ли блок трубу в скважину. Если блок не вставил трубу в скважину до точки, достаточной для обеспечения возможности ее выпуска блоком, таким образом, чтобы можно было извлечь другую трубу, можно определить, находится ли первая точка данных, по существу, близко к нижнему предельному значению графика данных положения блока. Вставка трубы в скважину может быть остановлена, если первая точка данных находится, по существу, близко к нижнему предельному положению на графике данных положения блока. Кроме того, может быть разрешено продолжить вставку блоком трубы в скважину, если первая точка данных не находится, по существу, близко к нижнему предельному значению на графике данных положения блока.
В еще одном аспекте настоящего изобретения способ работы блока на установке для ремонта скважин, путем анализа графика данных положения блока, может включать в себя следующее: оценивают первую точку данных на графике данных положения блока. Способ может также включать в себя следующее: определяют, был ли блок опущен до достаточно низкого положения, чтобы можно было удалить следующую трубу из скважины. Если блок был опущен в достаточно низкое положение для удаления следующей трубы из скважины, может быть определено, находится ли первая точка данных, по существу, близко к нижнему пределу, на графике данных положения блока. Опускание блока для извлечения следующей трубы и удаления ее из скважины может быть остановлено, если первая точка данных находится, по существу, близко к нижнему пределу на графике данных положения блока. Кроме того, может быть разрешено опустить блок для удаления следующей трубы, которая должна быть извлечена из скважины, если первая точка данных не находится, по существу, близко к нижнему предельному положению на графике данных положения блока.
В другом аспекте настоящего изобретения способ определения скорости блока на установке для ремонта скважин, путем анализа графика скорости кодера, может включать в себя следующее: выбирают точку данных скорости кодера на графике скорости кодера. Могут быть определены величина подсчета кодера для точки данных скорости кодера и количество импульсов кодера для одного оборота подъемного барабана подъемника, который поднимает и опускает блок. Скорость вращения, в оборотах за период времени, может быть определена путем расчета частного величины подсчета кодера, разделенной на количество импульсов кодера за один оборот подъемного барабана подъемника. Величина окружности сердечника подъемного барабана подъемника может быть определена и может быть умножена на это частное для получения скорости блока в выбранной точке данных скорости кодера.
Краткое описание чертежей
Для более полного понимания примерных вариантов воплощения настоящего изобретения и его преимуществ будет сделана ссылка на следующее описание, которое следует рассматривать совместно с прилагаемыми чертежами, на которых:
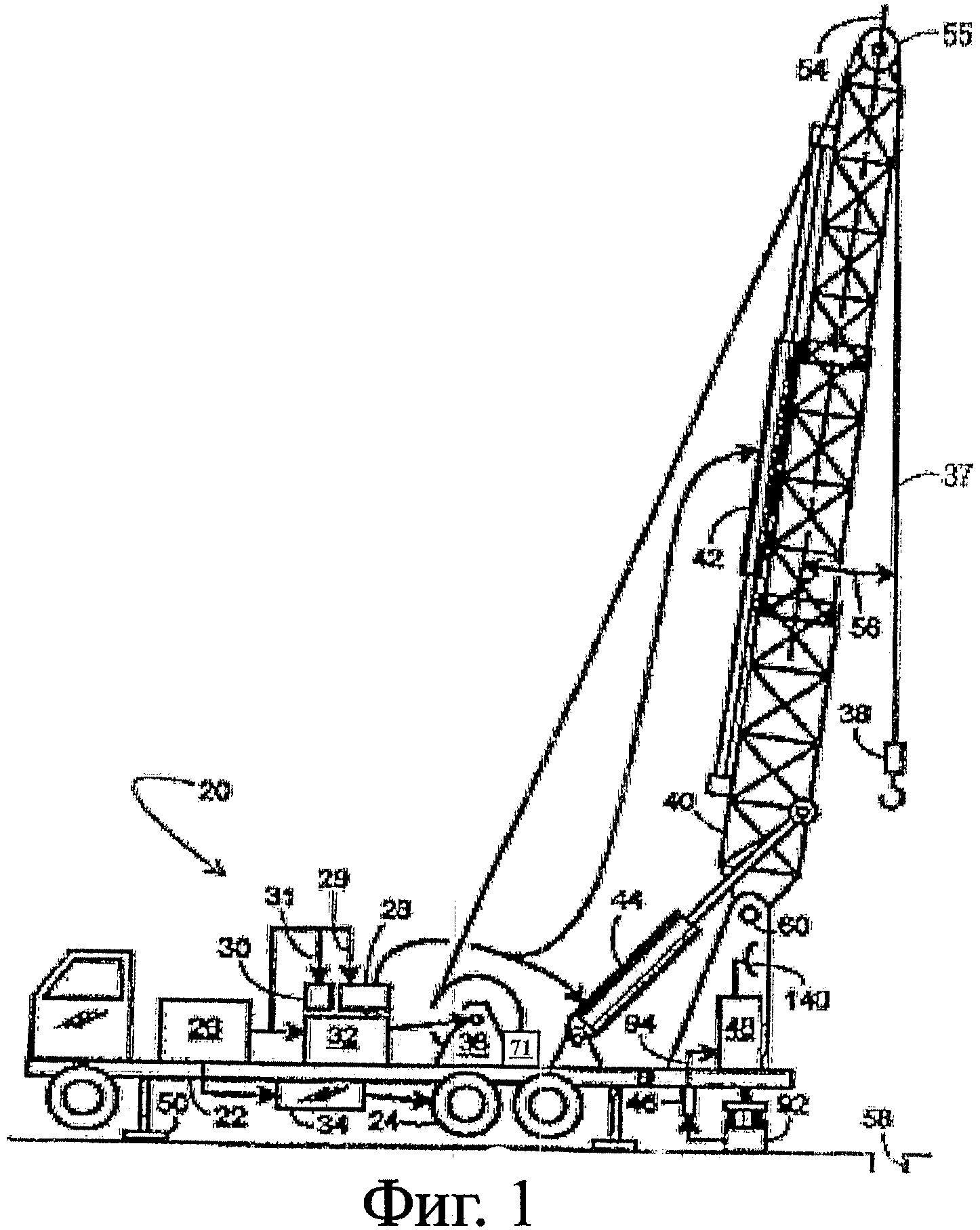
на фиг.1 показан вид сбоку установки для ремонта скважин, стрела подъемного крана которой установлена в соответствии с одним примерным вариантом воплощения настоящего изобретения;
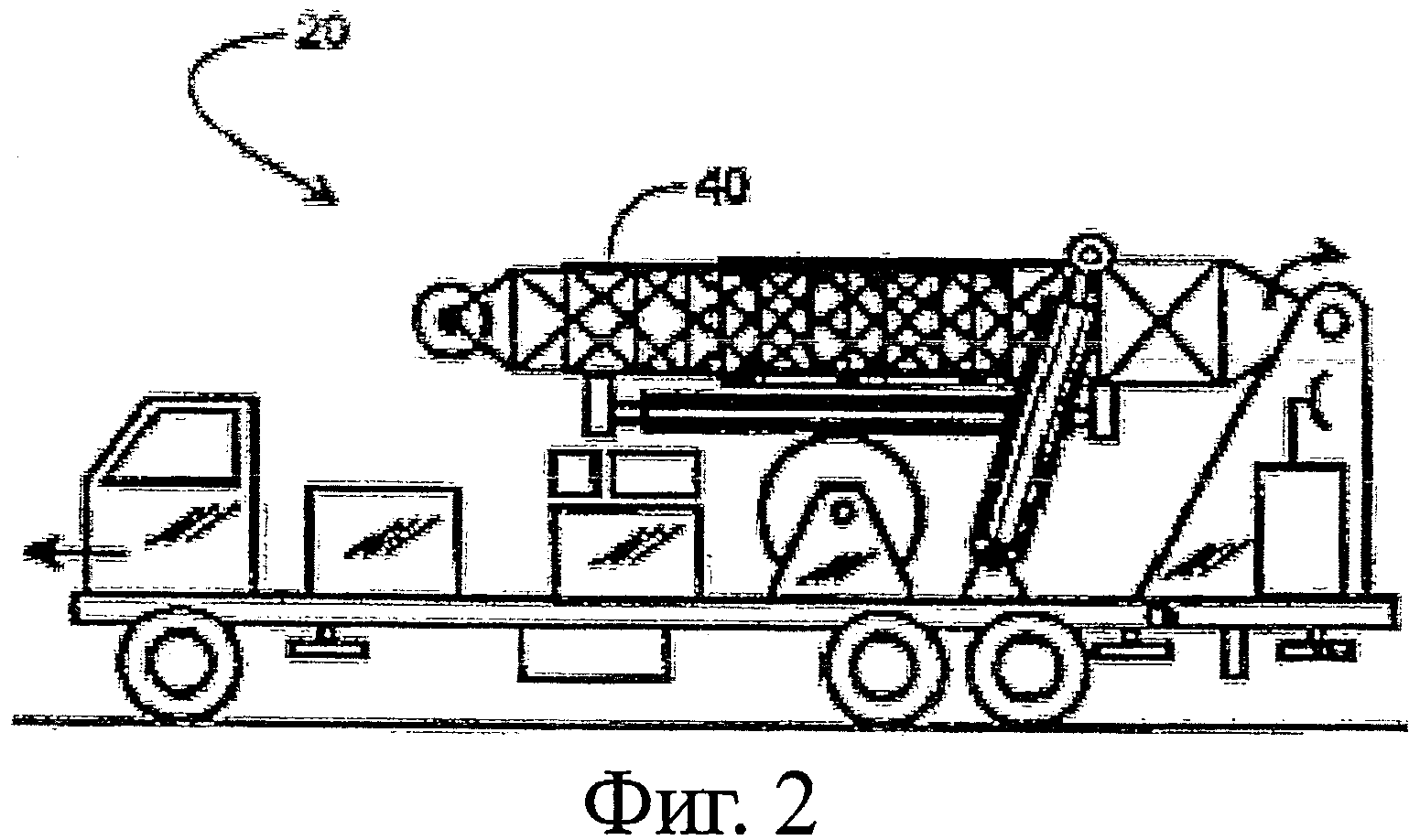
на фиг.2 показан вид сбоку установки для ремонта скважин, стрела подъемного крана которой убрана в соответствии с одним примерным вариантом воплощения настоящего изобретения;
на фиг.3 показаны подъем и опускание внутренней колонны насосно-компрессорных труб с примерной установкой для ремонта скважин в соответствии с одним примерным вариантом воплощения настоящего изобретения;
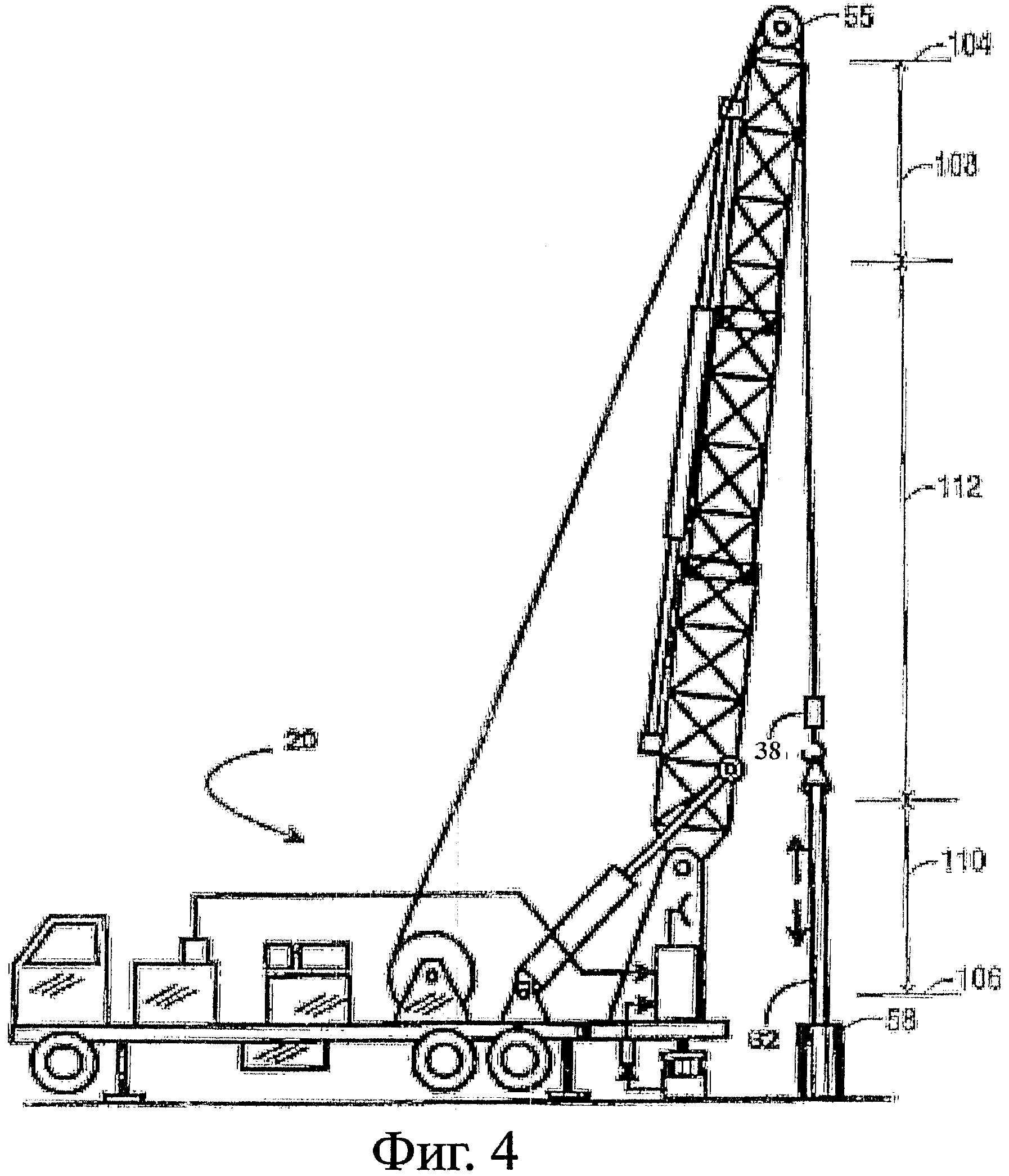
на фиг.4 иллюстрируется другой вариант воплощения подъема и опускания внутренней колонны насосно-компрессорных труб с использованием примерной установки для ремонта скважин в соответствии с одним примерным вариантом воплощения настоящего изобретения;
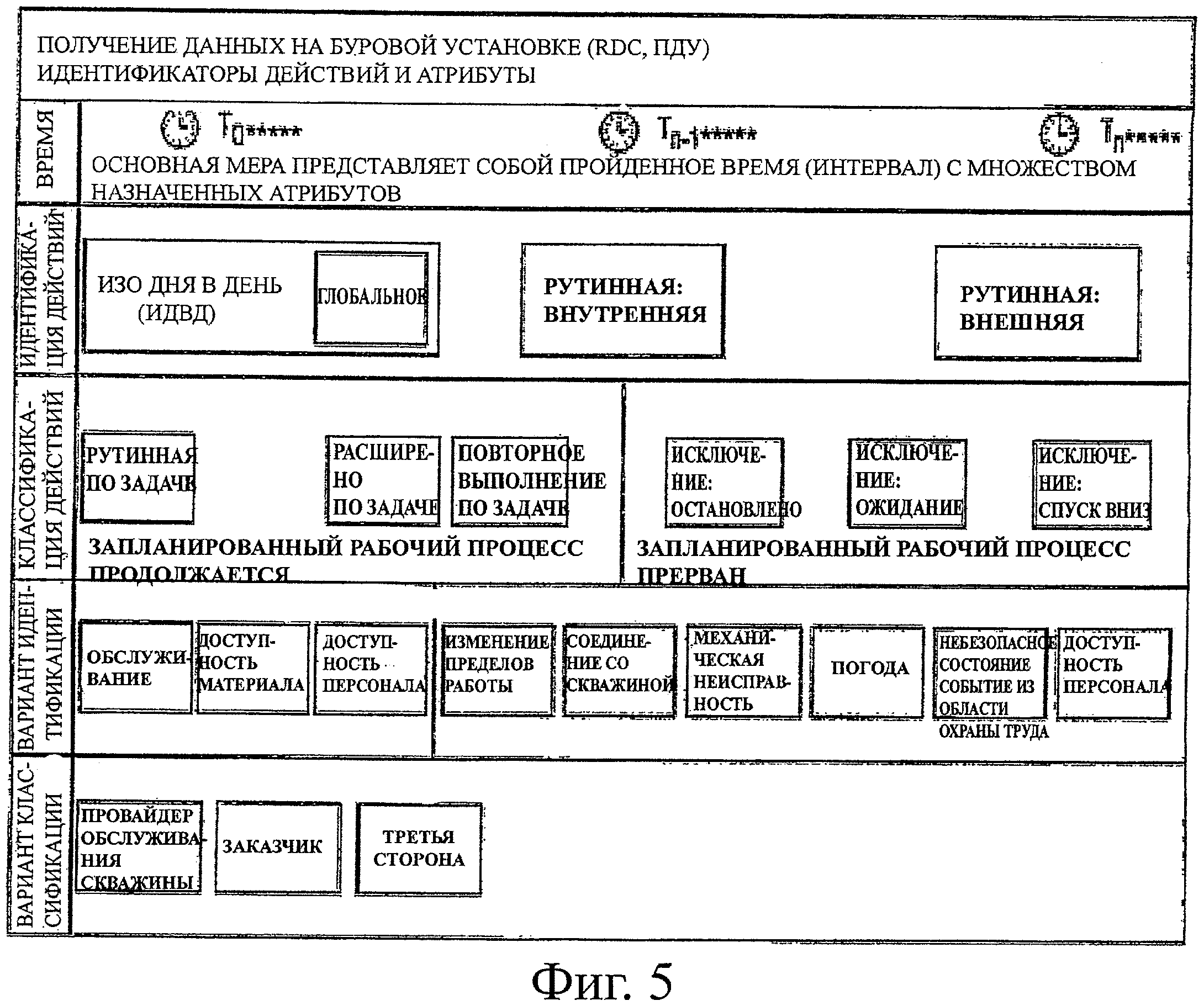
на фиг.5 иллюстрируется один вариант воплощения методики определения действий, кратко представленной в табличной форме в соответствии с одним примерным вариантом воплощения настоящего изобретения;
на фиг.6 показан вид спереди примерного интерфейса оператора в соответствии с одним примерным вариантом воплощения настоящего изобретения;
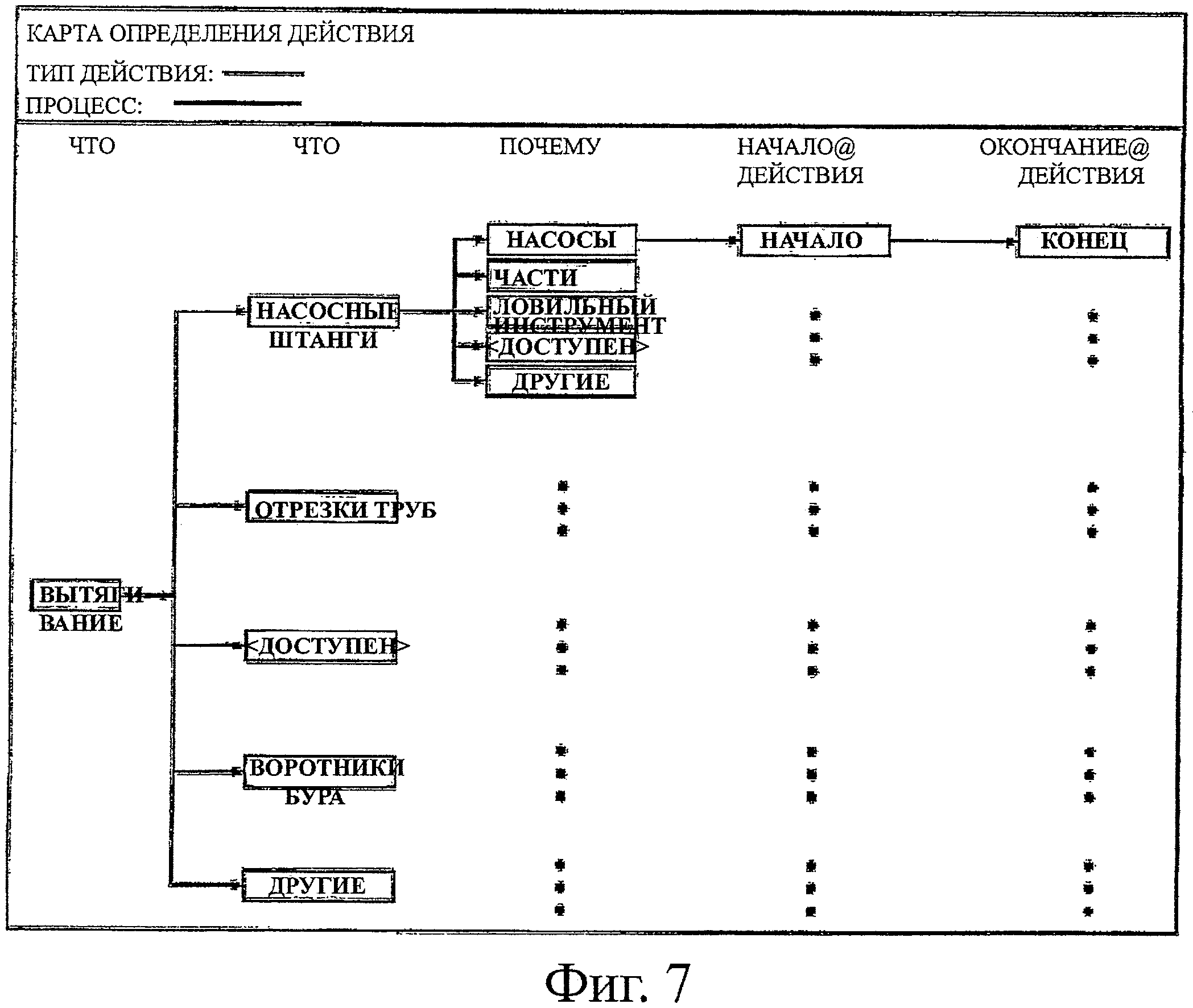
на фиг.7 представлена иллюстрация примерной карты определения действий в соответствии с одним примерным вариантом воплощения настоящего изобретения;
на фиг.8 представлена иллюстрация примерного отображения данных датчика для просмотра оператором буровой установки или контроллером в соответствии с одним примерным вариантом воплощения настоящего изобретения;
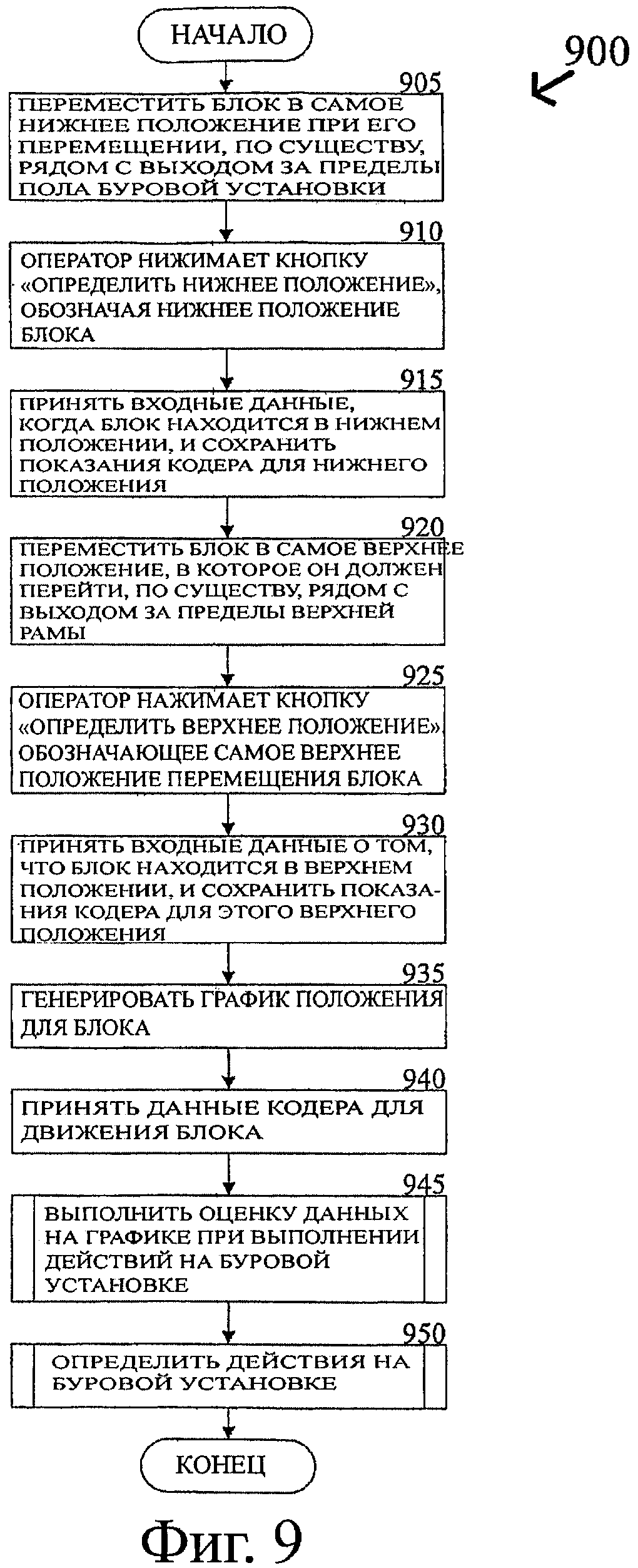
на фиг.9 показана блок-схема последовательности операций примерного процесса оценки положения блока в установке для ремонта скважин, путем оценки данных положения блока на дисплее, в соответствии с одним примерным вариантом воплощения настоящего изобретения;
на фиг.10 представлена иллюстрация примерного отображения кривых данных положения блока, предоставляемых для оператора на дисплее в соответствии с одним примерным вариантом воплощения настоящего изобретения;
на фиг.11 показана блок-схема последовательности операций примерного процесса оценки отображения данных положения блока для определения положения блока в установке для ремонта скважин во время работы буровой установки в соответствии с одним примерным вариантом воплощения настоящего изобретения;
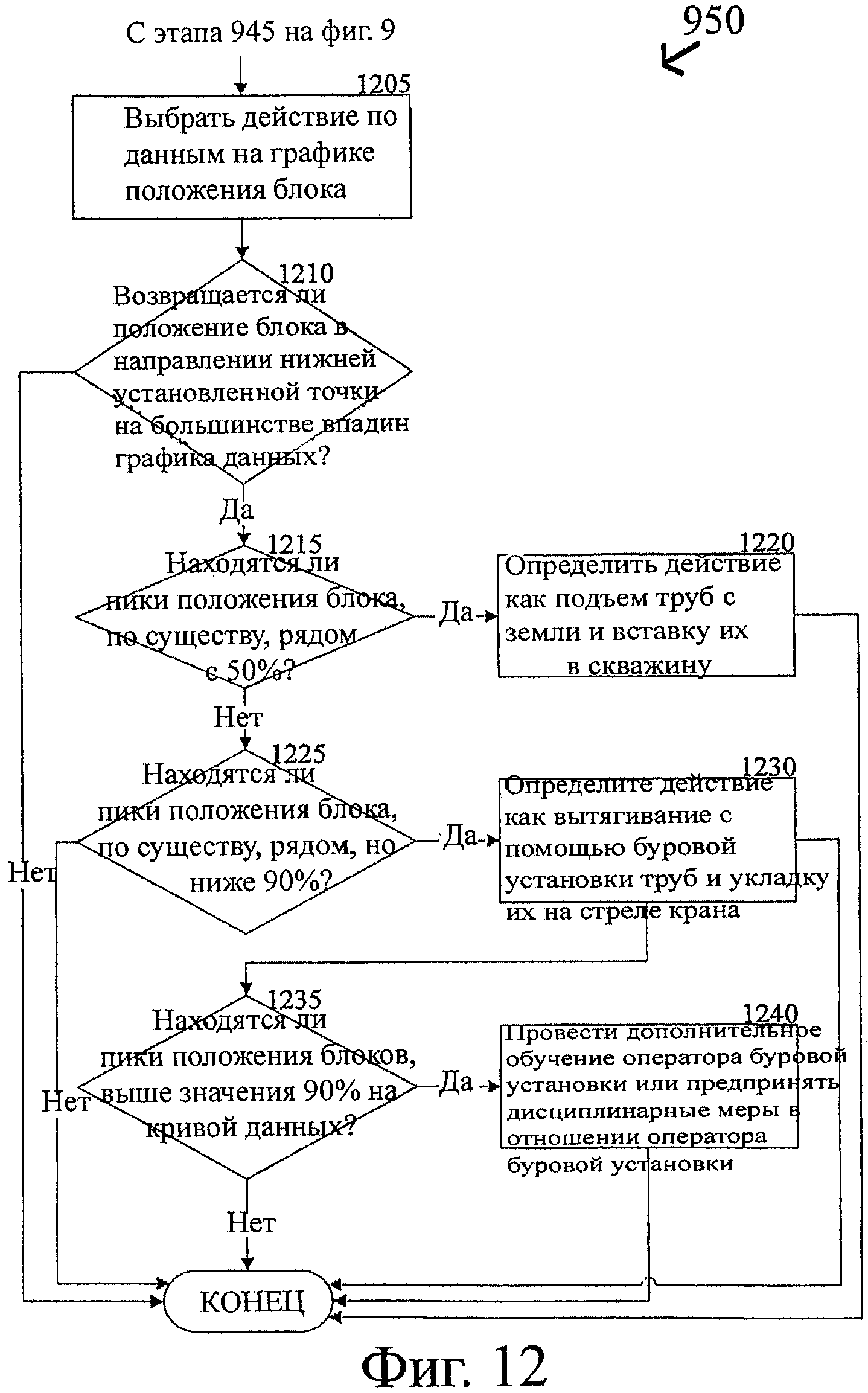
на фиг.12 показана блок-схема последовательности операций примерного процесса оценки отображения данных положения блока, для определения действий, которые происходят в установке для ремонта скважин в соответствии с одним примерным вариантом воплощения настоящего изобретения;
на фиг.13 приведена иллюстрация примерного отображения графика скорости кодера для оценки скорости блока в установке для ремонта скважин в соответствии с одним примерным вариантом воплощения настоящего изобретения;
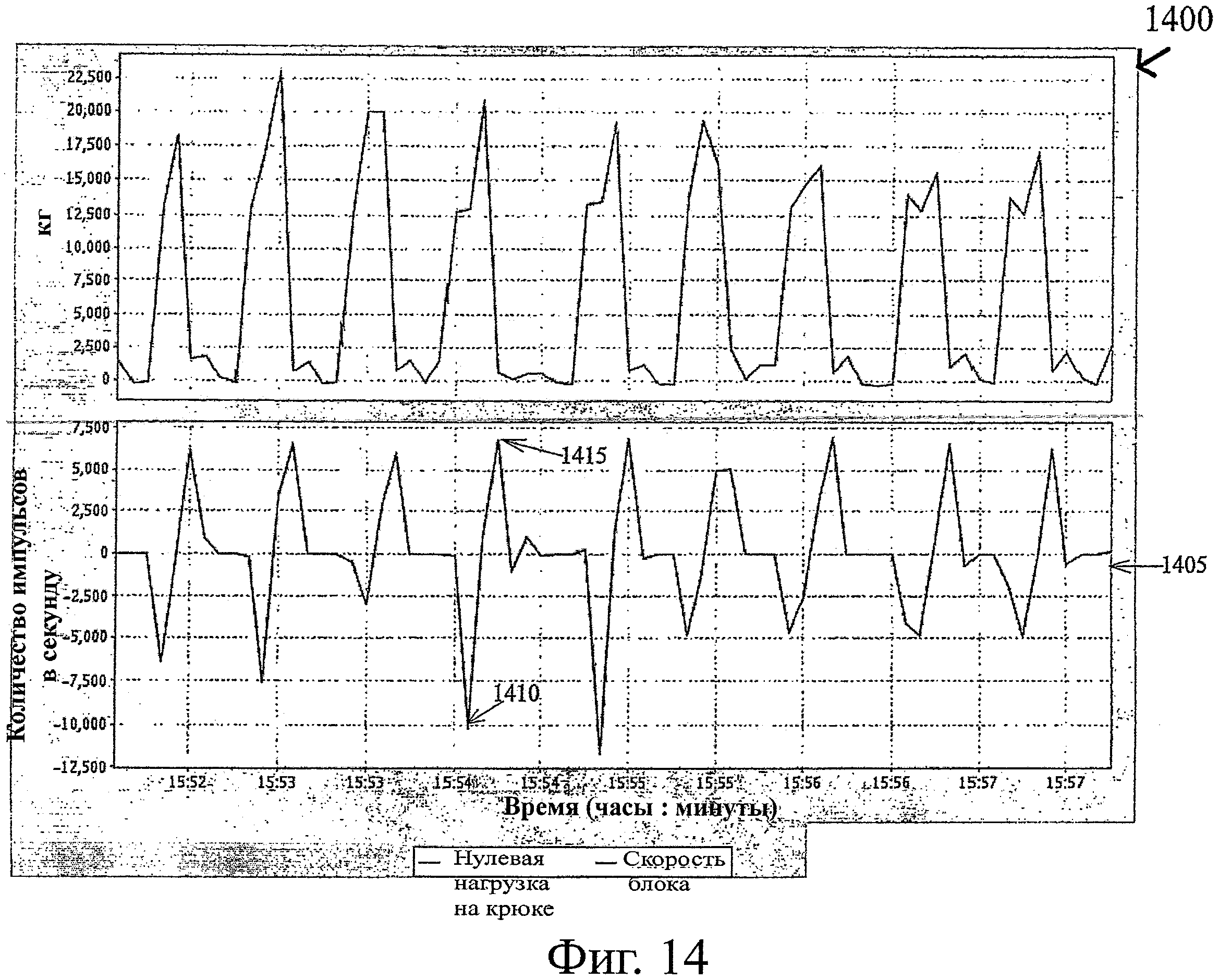
на фиг.14 приведена другая иллюстрация примерного отображения графика скорости кодера для оценки скорости блока в установке для ремонта скважин в соответствии с одним примерным вариантом воплощения настоящего изобретения; и
на фиг.15 показана блок-схема последовательности операций примерного процесса оценки отображения скорости кодера и определения скорости блока для блока установки для ремонта скважин в соответствии с одним примерным вариантом воплощения настоящего изобретения.
Подробное описание изобретения
Поскольку мобильная установка для ремонта скважин обычно представляет собой центр ремонтных работ или операций по техническому обслуживанию на буровой площадке, настоящее изобретение направлено на расширение возможностей установки для ремонта скважин таким образом, чтобы записывать данные, полученные на основе действий и/или на основе времени для буровой установки. В изобретении рассматривается, что оператор буровой установки может отслеживать полученные данные, или они могут быть переданы в режиме, близком к режиму реального времени, или периодически через проводные, беспроводные, спутниковые каналы передачи данных или путем физической передачи, например, модуля памяти в центр обработки и хранения данных, предпочтительно управляемый владельцем установки для ремонта скважин центр обработки и хранения данных, но, в качестве альтернативы, управляемый владельцем скважины или третьей стороной. Данные могут после этого использоваться для оценки данных и для дистанционного надзора над действиями установки для ремонта скважин. Этот последний вариант воплощения изобретения обеспечивает возможность для владельца установки для ремонта скважин, контроллера или владельца скважины, который представляет собой заказчика работ, отслеживать работу, выполняемую установкой для ремонта скважин, и другой третьей стороне могут быть предоставлены данные, которые могут быть получены после фактического выполнения работы или, по существу, в режиме реального времени. Как более подробно описано ниже, обращаясь к данным, регулярно обновляемым через сетевой портал, заказчик работ получает возможность определения в режиме, близком к режиму реального времени, окончания работ, выполняемых установкой для ремонта скважин. На основе такой информации владелец или контроллер может начислять для заказчика работ более точные счета и может обучать или следить за дисциплиной персонала установки для ремонта скважин на основе их действий и времени окончания их работы. Кроме того, заказчик получает доступ к подробным данным о фактической выполненной работе и затем может проверять свои счета-накладные. Кроме того, владелец или контроллер может оценивать данные для определения эффективности и соответствия письменных отчетов, полученных от оператора установки для ремонта скважин.
Настоящее изобретение способствует достижению синергетической взаимосвязи между заказчиком работ и обслуживающими компаниями, которая способствует созданию безопасной среды, путем мониторинга рабочих действий персонала и скорости работы оборудования, что позволяет улучшить производительность, снизить затраты, связанные с техническим обслуживанием, используя улучшенные рабочие процессы, обеспечивает лучшее управление данными и снижает ошибки во время работы.
Вариант воплощения изобретения на обычной установке для ремонта скважин может быть концептуально разделен на два основных аспекта: 1) получение, запись и передача данных преобразователя, таких как скорость кодера, положение блока, нагрузка на крюке, гидравлическое давление и т.д. и 2) получение, запись и передача действий, связанных с обслуживанием, таких как "Определить верхнее положение", "Определить нижнее положение", "Сборка установки" и "Монтаж блока противовыбросовых превенторов", помимо прочих. Получение данных физического преобразователя или данных датчиков может быть обеспечено автоматически, например, с помощью преобразователя, который преобразует значение давления в электрические сигналы, передаваемые в аналогово-цифровой преобразователь и затем в средство записи, такое как жесткий диск в компьютере или память в микропроцессоре. Определение действий, связанных с техническим обслуживанием, может быть обеспечено оператором установки для ремонта скважин, который вводит эти данные в систему на основе микропроцессора. Предусматривается, что данные преобразователя и данные о действиях могут быть получены и сохранены с помощью одной и той же или разных систем, в зависимости от конструкции и требований к установке для ремонта скважин.
В некоторых вариантах воплощения изобретения может быть желательным обеспечить получение и надежное сохранение данных на буровой площадке таким образом, чтобы оператор установки для ремонта скважин или другие представители обслуживающей компании не имели возможности манипулировать с этими данными или фальсифицировать эти данные. Один из вариантов воплощения такой концепции в соответствии с изобретением состоит в том, что запрещена коррекция ошибок на месте. Другими словами, если оператор буровой установки непреднамеренно введет информацию о том, что услуга вытягивания трубы началась, когда фактически выполнялась операция монтажа блока противовыбросовых превенторов, оператор может немедленно ввести информацию о том, что операция извлечения трубы закончилась, и может ввести информацию, что начался процесс монтажа блока противовыбросовых превенторов. Кроме того, или в качестве альтернативы, оператор может сделать примечание в списке действий, или возможность ввода примечания может быть ограничена для персонала в центре обработки и хранения данных. Также предусматривается возможность для оператора (или другого человека, вводящего информацию) иметь полное управление редактированием данных (как данных преобразователя, так и данных о выполненных действиях), принятых в систему накопителя данных.
Ниже приведено описание одного примерного варианта воплощения настоящего изобретения. Следует понимать, что данный примерный вариант воплощения представляет собой всего лишь один из способов воплощения настоящего изобретения и не обязательно воплощает все аспекты изобретения. Поэтому примерный вариант воплощения, описанный ниже, не следует рассматривать как ограничение или определение внешних границ настоящего изобретения.
Регистрация физических действий, которые происходят на буровой площадке, может быть определена путем оценки данных датчика, поступающих из преобразователя, или когда оператор установки для ремонта скважин вводит то, что происходит на буровой площадке. Вводимая оператором информация используется для регистрации и классификации действий, происходящих на буровой площадке, времени выполнения этих действий, любых исключительных событий, которые предотвращают, ограничивают или удлиняют выполнение действия, и основной причины и ответственной стороны, связанной с исключительными событиями. Вводимые оператором данные получают при вводе оператором данных о выполненных действиях в компьютер или микропроцессор по мере того, как выполняются разные операции обслуживания, таким образом, что заказчик работ и провайдер услуги могут иметь точное представление того, что происходит на буровой площадке.
В одном примерном варианте воплощения оператор может просто печатать информацию о выполненных действиях, вводя ее в компьютер, расположенный на буровой площадке. В другом варианте воплощения компьютер предоставляет оператору множество заранее идентифицированных действий, уже запрограммированных в нем. Когда оператор начинает или прекращает какое-либо действие, он может просто нажать кнопку или область на сенсорном дисплее, соединенным с компьютером, для регистрации остановки или начала такого заранее идентифицированного действия при выполнении ремонтных работ. В дополнительном варианте воплощения для оператора предусмотрена иерархия выполняемых при обслуживании задач, из которой он делает выбор. Предпочтительно такая иерархия ремонтных работ разработана так, чтобы она была интуитивно понятна для оператора, таким образом, иерархия скомпонована так, что она аналогична ходу выполнения различных действий при проведении ремонтных работ на буровой площадке.
Действия, выполняемые во время ремонтных работ на буровой площадке, обычно могут быть разделены на три идентификатора действий: глобальные, выполняемые из дня в день ("DIDO", "ИДВД") действия по обслуживанию скважины, внутренние рутинные действия и внешние рутинные действия. Действия ИДВД представляют собой действия, которые выполняются практически каждый день, пока установка для ремонта скважин находится на буровой площадке. В случае мобильной установки для ремонта скважин примеры действий ИДВД включают в себя монтаж установки для ремонта скважины, вытягивание и укладку буровых штанг, извлечение и укладка колонны труб, захват и спуск труб, захват и спуск штанг и демонтаж установки для ремонта скважин. Внутренние рутинные действия - это действия, которые часто выполняются во время проведения работ по обслуживанию скважины, но которые не обязательно представляют собой действия ИДВД. Примеры внутренних рутинных действий включают в себя монтаж или демонтаж вспомогательного модуля обслуживания, длинный ход, срез парафина, монтаж/демонтаж противовыбросовых превенторов, ловильные работы, виброобработка, свабирование, обратный приток, бурение, очистка, действия по управлению скважиной, такие как устранение скважинного или циркулирующего флюида, демонтаж насосов, установка/высвобождение трубного якоря, установка/высвобождение пакера и захват и укладка воротников бура и/или других инструментов.
Как показано на фиг.1, убираемая автономная установка 20 для ремонта скважин, показанная на чертеже, включает в себя раму 22 грузовика, установленную на колеса 24, двигатель 26, гидравлический насос 28, воздушный компрессор 30, первую трансмиссию 32, вторую трансмиссию 34, подъемник 36 с переменной скоростью подъема, блок 38, раздвижную стрелу 40 подъемного крана, первый гидравлический цилиндр 42, второй гидравлический цилиндр 44, монитор 48, выдвигающиеся опоры 50 и кодер 71. Двигатель 26 избирательно подключают к колесам 24 и к подъемнику 36 с использованием трансмиссии 34 и 32, соответственно. Двигатель 26 также приводит в действие гидравлический насос 28 через линию 29 и воздушный компрессор 30 через линию 31. Компрессор 30 обеспечивает энергией пневматическую скользящую клиновую плашку (не показана), и насос 28 обеспечивает энергией набор гидравлических зажимов (не показаны). Насос 28 также приводит в действие цилиндры 42 и 44, которые, соответственно, выдвигают и поворачивают стрелу 40 подъемного крана для избирательного помещения стрелы 40 подъемного крана в рабочее положение (фиг.1) и в убранное положение (фиг.2). В рабочем положении стрела 40 подъемного крана устанавливается вверх, но ее продольная центральная линия 54 смещена под углом от вертикали, как обозначено углом 56. Такое угловое смещение 56 обеспечивает возможность доступа блока 38 к стволу 58 скважины так, что при этом ему не мешает рама стрелы подъемного крана, и обеспечивает возможность быстрой установки и изъятия сегментов внутренней трубы, таких как сегменты колонны внутренней трубы, сегменты насосно-компрессорной трубы, штанги, трубопроводы и т.д. 62 (ниже "трубы", "сегменты" или "штанги" (фиг.3)).
При установке сегментов 62 внутренней трубы отдельные сегменты 62 трубы свинчивают вместе, используя гидравлические зажимы (не показаны). Гидравлические зажимы известны в данной области техники и обозначают любой гидравлический инструмент, который позволяет свинчивать вместе две трубы 62 или насосные штанги 62. Во время операции монтажа блок 38 удерживает каждый сегмент 62 трубы, в то время как его навинчивают на находящуюся внутри скважины колонну насосно-компрессорных труб. После такого соединения блок 38 поддерживает всю колонну сегментов 62 труб таким образом, что новый сегмент 62 трубы можно опустить в скважину 58. После опускания всю колонну 62 труб закрепляют, и блок 38 захватывает другой сегмент 62 трубы для соединения со всей колонной 62 насосно-компрессорных труб. И, наоборот, во время операции разборки блок 38 поднимает всю колонну насосно-компрессорных труб, состоящую из сегментов 62 труб, из-под земли, до тех пор, пока, по меньшей мере, один отдельный сегмент 62 не поднимется выше уровня земли. Трубу закрепляют, и затем блок 38 удерживает сегмент 62 трубы, в то время как его отсоединяют от колонны. Блок 38 затем перемещает отдельный сегмент 62 трубы в сторону и возвращается для подъема колонны 62 труб таким образом, чтобы дополнительные отдельные сегменты 62 труб можно было бы отсоединить от колонны 62 труб.
Как снова показано на фиг.1, вес, прикладываемый к блоку 38, измеряют, например, с помощью гидравлической подушки 92, которая поддерживает вес стрелы 40 подъемного крана. Обычно гидравлическая подушка 92 представляет собой поршень внутри цилиндра, но, в качестве альтернативы, может быть выполнена как диафрагма. Гидравлическое давление в подушке 92 увеличивается по мере увеличения веса блока 38, и это давление можно, соответственно, отслеживать для получения веса блока 38. Другие типы датчиков можно использовать для определения веса блока 38, включая линейные индикаторы, закрепленные на неподвижном конце подъемника 36, датчик деформации, который измеряет любые силы сжатия, действующие на стрелу 40 подъемного крана, или динамометрические элементы, установленные в разных положениях на стреле 40 подъемного крана или на верхней раме. Хотя вес блока можно измерять любым способом, конкретное средство измерения не является критическим для настоящего изобретения.
Подъемник 36 управляет движением троса 37, который продолжается от подъемника 36 через верхнюю часть узла 55 колеса верхней рамы, расположенного в верхней части стрелы 40 подъемного крана, который поддерживает перемещающийся блок 38. Подъемник 36 наматывает и разматывает трос 37, перемещая в результате перемещающийся блок 38 между его положением узла 55 колеса верхней рамы и нижним положением, которое обычно располагается в стволе 58 скважины, но может быть расположено на высоте пола приподнятой платформы, расположенной над скважиной 58 (не показана). Положение перемещающегося блока 38 между его положением верхней рамы и положением пола требуется постоянно отслеживать.
Для отслеживания положения блока 38 система содержит магнитное устройство съема или другой датчик с электрическим выходом, такой как кодер 71, который функционально расположен рядом с вращающейся частью тросового подъемника 36 или узла 55 колеса верхней рамы и формирует электрические импульсы при вращении детали. В качестве альтернативы, используют фотоэлектрическое устройство, которое генерирует необходимые электрические импульсы. Такие электрические импульсы передают в электронное оборудование, которое считывает электрические импульсы и ассоциирует их со значением умножающего коэффициента, определяя, таким образом, положение перемещающегося блока. Другие способы также можно использовать в настоящем изобретении, такие как квадратурный кодер, оптический квадратурный кодер, линейный 4-20 кодер или другие такие устройства, известные в данной области техники.
Важно, чтобы положение блока 38 было измерено и было известно. Обычно на установке 20 для ремонта скважины более важно знать положение блока 38, даже чем на буровой установке. На буровой установке вытягивают звенья буровых штанг, которые обычно представляют собой трубы одинаковой длины. Хотя на буровых установках могут вытягивать двойные звенья буровых штанг или одиночные звенья буровых штанг, независимо от того, как эта работа выполняется, обычно она выполняется всегда одинаково. Кроме того, буровые установки не переключаются между вытягиванием или опусканием труб и штанг.
С другой стороны, установки 20 для ремонта скважины обычно перемещаются от одной скважины к другой. Каждая скважина имеет разную высоту пола буровой вышки и другие характеристики. Кроме того, установка 20 для ремонта буровых скважин может вытягивать тройные звенья буровых штанг, представляющие собой штанги длиной семьдесят пять футов, и затем, позже, может вытягивать двойные звенья буровых штанг, которые имеют длину шестьдесят футов. Таким образом, верхняя и нижняя границы установок 20 для ремонта буровых скважин, поднимающих и опускающих штанги и трубы, могут непрерывно изменяться в зависимости от конкретных аспектов работы и характеристик зоны скважины, и, таким образом, важно знать верхний и нижний пределы для блока 38 во время каждой конкретной операции.
После того как положение талевого блока 38 станет известным, скорость талевого блока 38 можно легко рассчитать с помощью описанной здесь системы. Когда требуется предотвратить выход за пределы верхней рамы, система вначале измеряет скорость и вертикальное положение талевых блоков 38. В зависимости от того, в какой области 104-112 (в каком положении) находятся блоки 38 (фиг.4), оператор выполняет оценку по дисплею 610 (фиг.6) для определения, достигли ли блоки 38 или приблизительно достигли ли они границы верхнего или нижнего уровня. Такая методика позволяет персоналу в любой точке, в любой области 104-112 работать с полной мощностью при подъеме тяжелых грузов, при полных оборотах двигателя, в то время, как оценивают данные о положении блока и поддерживают между верхним и нижним пределами, включая определенные допуски безопасности.
Независимо от скорости блока 38, когда блок 38 достигает заданного верхнего предела, как показано на фиг.4, который представляет собой верхнюю точку 104 (верхний предел перемещения), оператор буровой установки или системы останавливает движение вверх талевого блока 38, уменьшая обороты двигателя 26 до оборотов холостого хода, отпуская сцепление барабана и устанавливая парковочный тормоз барабана. Когда блок 38 перемещается вниз через область 108 и 112, если скорость находится ниже заданного или рассчитанного максимального значения для данной области, которое основано на оценке данных скорости кодера на дисплее 610, оператор не должен предпринять какое-либо действие. Когда блоки 38 перемещаются в нижнюю область 110, которая расположена близко к нижней точке 106 остановки установки для ремонта скважин, оператор 20 установки для ремонта скважин оценивает данные о положении блока по графику положения блока для определения, когда требуется остановить блок 38 прежде, чем он достигнет нижнего предельного значения.
Рассмотрим теперь фиг.4, на которой показана установка для ремонта скважин с блоком 38, поддерживающим колонну 62 насосно-компрессорных труб. Общее перемещение блока 38 происходит между верхней рамой подъемника 55 и полом буровой вышки возле устья 58 скважины. Точка, перед которой происходит выход за пределы верхней рамы, представляет собой верхнее предельное значение перемещения 104, в котором талевый блок 38 должен быть полностью остановлен системой. Точка перед выходом за пределы пола буровой вышки представляет собой нижнее предельное значение перемещения 106, в котором талевый блок 38 также должен быть полностью остановлен системой. Участок ниже верхнего предельного значения представляет собой верхний защищенный участок 108 перемещения.
На фиг.5 представлена иллюстрация методики регистрации действий в табличной форме в соответствии с одним примерным вариантом воплощения настоящего изобретения. Теперь, как показано на фиг.5, оператор вначале выбирает идентификатор действия для поступающей задачи. Если будет выбрано "ГЛОБАЛЬНОЕ", то оператор выбирает подъем/спуск буровой установки, вытягивание/спуск труб или штанг или укладку/захват труб и штанг (варианты выбора не показаны на фиг.5). Если будет выбран вариант "РУТИННАЯ: ВНУТРЕННЯЯ", тогда оператор выбирает монтаж или демонтаж вспомогательного модуля обслуживания, длинный ход, срез парафина, монтаж/демонтаж противовыбросовых превенторов, ловильные работы, виброобработку, свабирование, обратный приток, бурение, очистку, действия по управлению скважиной, такие как устранение скважинного или циркулирующего флюида, демонтаж насосов, установку/высвобождение трубного якоря, установку/высвобождение пакера и захват и укладку воротников бура и/или других инструментов. Наконец, если будет выбрано "РУТИННАЯ: ВНЕШНЯЯ", оператор затем выбирает одно из действий, которое выполняется для третьей стороны, такое как монтаж/демонтаж обслуживающего оборудования третьей стороны, возбуждение скважины, цементирование, каротаж, перфорирование или инспекция скважины, и другие задачи обслуживания, обычно выполняемые для третьей стороны. После идентификации действия его классифицируют. Для всех вариантов классификации, помимо "ПРИ ВЫПОЛНЕНИИ ЗАДАЧИ: ПРОЦЕДУРА", выбирают идентификатор вариации, и затем классифицируют, используя значения классификации вариации.
На фиг.6 показан вид интерфейса оператора установки или интерфейса контроллера в соответствии с одним примерным вариантом воплощения настоящего изобретения. Рассмотрим фиг.6, на которой показано, что от оператора требуется вводить данные о выполняемом действии в компьютер 605. Оператор может взаимодействовать с компьютером 605, используя множество средств, включающих в себя печать с помощью клавиатуры 625 или использование сенсорного экрана 610. В одном варианте воплощения оператору предоставляется дисплей 610 с заранее запрограммированными кнопками, такими как 615, 620, как показано на фиг.6, что позволяет оператору просто выбирать действие из группы заранее запрограммированных кнопок. Например, если для оператора, когда он прибывает на буровую площадку, будет представлен дисплей 610 по фиг.6, оператор вначале нажимает кнопку "RIG UP" (Выполнить монтаж). Оператору затем представляют варианты выбора, например, "МОДУЛЬ ОБСЛУЖИВАНИЯ", "ВСПОМОГАТЕЛЬНЫЙ МОДУЛЬ ОБСЛУЖИВАНИЯ" или "ТРЕТЬЯ СТОРОНА". Оператор затем выбирает требуемое действие, или в случае какого-либо исключения, действует, как описано выше. Кроме того, как показано на фиг.6, прежде чем труба 62 будет извлечена или вставлена, оператор может установить верхний и нижний пределы для блока 38, нажимая кнопки определить верхнее 615 или определить нижнее 620 положения после перемещения блока 38 в соответствующее положение.
Пример карты регистрации действий для операции вытягивания труб показан на фиг.7. Если оператор должен выбрать кнопку "ВЫТЯГИВАНИЕ" на верхнем экране, он затем должен выбрать вариант между "ШТАНГИ", "ОТРЕЗКИ ТРУБ", "ВОРОТНИКИ БУРА" или "ДРУГОЕ". Если оператор выбирает "ШТАНГИ", оператор затем должен выбрать между "НАСОС", "ЧАСТЬ", "ЛОВИЛЬНЫЙ ИНСТРУМЕНТ" или "ДРУГОЕ". Оператор должен быть обучен для определения времени начала и времени остановки каждого действия, как показано в двух последних колонках на фиг.7, таким образом, чтобы оператор мог соответствующим образом документировать период действия на буровой площадке. Каждый выбор должен иметь свой собственный поднабор задач, как описано выше, но для простоты на фиг.7 показан только поднабор для вытягивания штанг.
Наконец, как более подробно показано на фиг.8, пользователь сети может выбрать определенные данные преобразователя для просмотра на сетевой странице. Например, на фиг.8 нагрузка на крюке в фунтах, давление клещей захвата в фунтах на квадратный дюйм и скорость двигателя в оборотах в минуту показаны как функции времени бурения. Оператор, провайдер обслуживания скважины, заказчик или другая третья сторона могут использовать эти данные в некоторых вариантах воплощения, вместе с информацией о действиях, для определения, были ли операции обслуживания скважины эффективными и были ли они выполнены правильно. Это представляет очень ценный инструмент для повышения эффективности и производительности операций по обслуживанию скважины, а также предоставляет для заказчика информацию о том, что он не зря потратил деньги, при предоставлении услуги провайдером услуги.
Процессы примерных вариантов воплощения настоящего изобретения будут описаны ниже со ссылкой на фиг.9, 11, 12 и 15. Определенные этапы описанных ниже процессов, естественно, должны предшествовать другим этапам, чтобы настоящее изобретение функционировало, как описано. Однако настоящее изобретение не ограничивается описанным порядком этапов, если такой порядок или последовательность не меняют понятным образом функции настоящего изобретения. Таким образом, следует понимать, что некоторые этапы могут быть выполнены до или после других этапов, или параллельно с другими этапами, без выхода за пределы объема и сущности настоящего изобретения.
На фиг.9 показана логическая схема блок-схема последовательности операций, иллюстрирующая примерный способ 900 оценки положения блока установки 20 для ремонта скважины путем оценки данных положения блока на графике 1005 положения блока, представленного на дисплее 610. Теперь, как показано на фиг.1, 6, 9 и 10, примерный способ 900 начинается на этапе НАЧАЛО и продолжается до этапа 905, на котором оператор установки 20 для ремонта скважины устанавливает блок 38 в самой нижней точке, до которой, по мнению, оператора должен перемещаться блок 38, который располагается рядом с положением выхода за пределы пола буровой вышки. На этапе 910 оператор нажимает кнопку 620 "определить нижнее положение" на дисплее 610. Входная команда принимается в системе мониторинга 600, как указание о том, что блок 38 находится в нижнем положении, и текущее показание кодера 71 сохраняется в системе 600 мониторинга на этапе 915.
На этапе 920 оператор установки 20 для ремонта скважин перемещает блок 38 в самое высокое положение, в которое он должен перемещаться вдоль стрелы 40 подъемного крана, и которое располагается близко к точке выхода за пределы верхней рамы. На этапе 925 оператор нажимает кнопку 615 "определить верхнее положение" на дисплее 610. В результате, входная команда поступает в систему 600 мониторинга, о том, что блок 38 находится в верхнем положении, и система мониторинга сохраняет количество импульсов кодера, поступающих из барабана 36 подъемника труб, между верхним и нижним положениями и положением кодера 71 в верхнем положении на этапе 930. На этапе 935 система 600 мониторинга генерирует график 1005 положения блока для текущей работы блока 38.
Импульсы принимают из кодера 71 во время работы барабана 36 подъемника труб в установке 20 для ремонта скважин и передают, используя хорошо известные способы передачи электрических сигналов, в систему 600 мониторинга на этапе 940. На этапе 945 оператор выполняет оценку графика 1005 данных на дисплее 610 для определения, какие действия следует предпринять для подъема и опускания блока 38 во время работы барабана 36 подъемника труб. На этапе 950 действия, выполняемые установкой 20 для ремонта скважин, оценивают путем оценки графика 1005 данных, представляющих данные положения блока. Процесс затем продолжается от этапа 950 до этапа КОНЕЦ.
На фиг.10 показан пример кривых данных положения блока на дисплее, представляемых для оператора на дисплее 610 в системе 600 мониторинга. Теперь, как показано на фиг.1, 6 и 10, примерный дисплей 1000 включает в себя график 1005 данных положения блока. По оси Х графика 1000 данных положения блока представлено время, и по оси Y представлено процентное отношение импульсов кодера 71, сгенерированных при движении блока 38 в заданное положение. В одном примерном варианте воплощения сто процентов представляют положение "определенного верхнего положения", введенного оператором, и ноль процентов представляет положение "определенного нижнего положения", введенное оператором на дисплее 610. Как упомянуто выше, шкала 0-100 представляет местоположение блока 38 в любой момент времени на основе этой шкалы, по мере того, как он соответствует установленным точкам, введенным оператором. Действия могут быть определены путем оценки данных, представленных на графике 1005 данных положения блока. Например, на примерном графике 1005 несколько действий, представляющих одно или больше действий, которые понятны специалисту в данной области техники, включающие в себя действия, обозначены позициями 1010, 1015 и 1020. Оценка действий 1010 и 1015 на графике 1005 показывает, что блок 38 многократно перемещается вверх и вниз. Когда он движется вниз, блок 38 останавливается в нижней точке, или как представлено данными, рядом с точкой ноль процентов. Когда он движется вверх при выполнении действий 1010 и 1015, блок 38 останавливается или занимает верхнее положение, в позиции, близкой к сорока семи процентам. С точки зрения этих данных, на графике 1005 можно видеть, что установка 20 для ремонта скважин поднимает трубы 62 с земли. Это можно определить, поскольку кривая данных положения блока обозначает, что блок 38 перемещается только наполовину пути движения стрелы 40 подъемного крана в каждом интервале подъема.
Оценка действия 1020 на графике 1005 показывает, что блок 38 многократно перемещается вверх и вниз, останавливаясь в нижней точке, рядом с точкой ноль процентов, и останавливаясь в верхней точке в каждом цикле рядом с точкой восемьдесят пять процентов. При анализе этих данных на графике 1005 можно видеть, что установка 20 для ремонта скважин вытягивает трубы 62 из скважины и укладывает их на стреле 40 крана.
На фиг.11 показана логическая блок-схема последовательности операций, иллюстрирующая примерный способ 945 определения положений блока 38 на установке 20 для ремонта скважин, предназначенная для определения действий, предпринимаемых для подъема или опускания блока 38, путем оценки данных положения блока на графике 1005 положения блока на дисплее 610. Теперь, как показано на фиг.1, 6, 10 и 11, примерный способ 945 начинается на этапе 1105, на котором вырабатывается запрос для определения, перемещается ли блок 38 вверх или вниз, на основе оценки данных положения блока на графике 1005 данных положения блока. В одном примерном варианте воплощения, если кривая данных на графике данных 1005 положения блока имеет тенденцию перемещения вниз, в направлении точки ноль процентов, тогда блок перемещается в направлении вниз, и если кривая данных графика 1005 данных положения блока имеет тенденцию перемещения вверх, в направлении ста процентов, тогда блок 38 поднимается. В альтернативном варианте воплощения направление блока 38 определяют на основе оценки скорости блока (не показано).
Если будет определено, что блок 38 движется вверх, на этапе 1110 обработка следует ответвлению "вверх", при этом оператор установки 20 для ремонта скважин продолжает отслеживать данные по графику 1005 положения блока. На этапе 1115 вырабатывают запрос для определения, была ли колонна насосно-компрессорных труб 62 полностью извлечена из скважины 58, или колонна 62 насосно-компрессорных труб готова для погружения в скважину 58. Если ответ будет "ДА", обработка следует на этап 1130. В противном случае, обработка следует по ответвлению "НЕТ" на этап 1120. На этапе 1120 вырабатывается запрос для определения, находится ли положение блока на кривой данных рядом с определенной верхней точкой. В одном примерном варианте воплощения оператор выполняет такое определение путем оценки, находится ли положение блока на графике 1005 выше уровня восемьдесят пять процентов. Если блок 38 не находится, по существу, рядом с определенной верхней точкой, обработка следует по ответвлению "НЕТ" на этап 1125, где оператор позволяет блоку 38 продолжить движение в направлении вверх. Процесс затем возвращается на этап 1115. С другой стороны, если блок 38 находится, по существу, рядом с определенной верхней точкой графика 1005, обработка следует по ответвлению "ДА" до этапа 1130, где оператор прекращает подъем блока 38.
На этапе 1135 поступает запрос для определения, требуется ли повторно установить положение "определение верхнего предела". В одном примерном варианте воплощения может потребоваться повторно установить "определение верхнего предела", если оператор не может полностью вынуть колонну насосно-компрессорных труб 62 из скважины 58, так, чтобы блок не приближался слишком близко к определенному верхнему положению на графике 1005. Если требуется повторно установить "определенное верхнее положение", следуют по ответвлению "ДА" до этапа 1140, где оператор повторно устанавливает "определенное верхнее положение" путем подъема блока 38 в новое верхнее положение и нажатия на кнопку 615 определить верхнее положение на дисплее 610. Процесс затем переходит с этапа 1140 на этап 950 по фиг.9. С другой стороны, если определенное верхнее положение не требуется повторно устанавливать, обработка следует по ответвлению "НЕТ" на этап 1145, для оценки, почему оператор приблизился к определенному верхнему положению, так, что при этом труба 62 не была полностью извлечена из скважины 58 или не была готова для размещения внутри скважины 58. Процесс затем продолжается с этапа 1145 до этапа 950 по фиг.9.
При возврате на этап 1105, если определяют, что блок 38 опускают, следуют по ответвлению "Вниз" до этапа 1150, где оператор 20 установки для ремонта скважин продолжает отслеживать данные по графику 1005 положения блока. На этапе 1155 передают запрос для определения, была ли колонна насосно-компрессорных труб 62 полностью вставлена в скважину 58 или готова ли колонна насосно-компрессорных труб 62 для извлечения из скважины 58. Если это так, обработка следует по ответвлению "ДА" до этапа 1170. В противном случае, следуют по ответвлению "НЕТ" до этапа 1160. На этапе 1160 выполняют запрос для определения, находится ли положение блока на кривой данных близко к определенной нижней точке. В одном примерном варианте воплощения оператор определяет это путем оценки, находится ли блок на графике 1005 в положении ниже десяти процентов. Если блок 38 не находится, по существу, близко к определенной нижней точке, обработка следует по ответвлению "НЕТ" на этап 1165, где оператор позволяет блоку продолжить движение вниз. Процесс затем возвращается на этап 1155. С другой стороны, если блок 38 находится достаточно близко к определенной нижней точке на графике 1005, следуют ответвлению "ДА" до этапа 1170, где оператор прекращает движение вниз блока 38.
На этапе 1175 подают запрос для определения, следует ли повторно установить "определенное нижнее" предельное значение. В одном примерном варианте воплощения "определенное нижнее" предельное значение может потребоваться повторно установить, если оператор не может полностью вставить колонну насосно-компрессорных труб 62 в скважину 58, не приближаясь слишком близко к определенному нижнему положению на графике 1005. Если "определенное нижнее" предельное значение требуется повторно установить, обработка следует по ответвлению "ДА" до этапа 1180, на котором оператор повторно устанавливает "определенное нижнее" положение, опуская блок 38 в новое нижнее положение и нажимая кнопку 620 определить нижнее положение на дисплее 610. Процесс затем продолжается от этапа 1180 до этапа 950 на фиг.9. С другой стороны, если определенное нижнее положение не требуется повторно устанавливать, обработка следует по ответвлению "НЕТ" до этапа 1145 для оценки, почему оператор приблизился к определенному нижнему положению и при этом колонна 62 не была полностью вставлена в скважину 58 или не готова для извлечения из скважины 58. Процесс затем продолжают от этапа 1145 до этапа 950 по фиг.9.
На фиг.12 показана логическая блок-схема последовательности операций, иллюстрирующая примерный способ 950, предназначенный для определения действий, которые происходили на установке 20 для ремонта скважин, путем оценки данных положения блока на графике 1005 положения блока, представленном на дисплее 610. Теперь, как показано на фиг.1, 6, 10 и 12, примерный способ 950 начинается на этапе 1205, на котором выбирают действие по данным положения блока на графике 1005. На этапе 1210 передают запрос для определения путем оценки данных на графике 1005, возвращается ли положение блока, по существу, к определенной нижней установленной точке, в основном, на всех данных. В одном примерном варианте воплощения данные возвращаются, по существу, к определенной нижней установленной точке, если все данные достигают приблизительно пяти процентов на графике 1005. Если положение на всех данных не является достаточно близким к определенной нижней точке, обработка следует по ответвлению "НЕТ" на этап КОНЕЦ. В противном случае, обработка следует по ответвлению "ДА" до этапа 1215.
На этапе 1215 передают запрос для определения, находятся ли положения пиков данных положения блока на графике 1005 для выбранной действия, по существу, близко к значению пятьдесят процентов. В одном примерном варианте воплощения эти пики находятся, по существу, рядом с положением пятьдесят процентов, если большая часть пиков для этого действия находится в диапазоне от сорока двух до пятидесяти пяти процентов. Если пики данных положения блока, по существу, находятся рядом с положением пятьдесят процентов, обработка следует по ответвлению "ДА" до этапа 1220, на котором контроллер или третья сторона определяет, что действие, выполняемое установкой 20 для ремонта скважин, представляет собой подъем труб 62 с земли и вставку их в скважину 58. Процесс затем продолжается от этапа 1220 до этапа КОНЕЦ. С другой стороны, если пики данных положения блока не находятся, по существу, рядом с положением пятьдесят процентов, обработка следует по ответвлению "НЕТ" до этапа 1225.
На этапе 1225 формируется запрос для определения, находятся ли пики данных положения блока графика 1005 для выбранного действия, например действия 1020, по существу близко, но ниже уровня девяносто процентов. В одном примерном варианте воплощения пики находятся, по существу, близко, но ниже уровня девяносто процентов, если большая часть пиков для этого действия находится в диапазоне от восьмидесяти до восьмидесяти девяти процентов. Если пики данных положения блока находятся, по существу, близко, но ниже уровня девяносто процентов, обработка следует по ответвлению "ДА" до этапа 1230, где контроллер или третья сторона определяет, что установка 20 для ремонта скважин выполняла выемку труб 62 из скважины 58 и укладку их на стреле 40 подъемного крана. Процесс затем продолжается от этапа 1230 до этапа КОНЕЦ. С другой стороны, если пики данных положения блока не находятся, по существу, близко, но ниже уровня девяносто процентов, обработка следует по ответвлению "НЕТ" до этапа 1235.
На этапе 1235 вырабатывается запрос для определения, находятся ли пики данных положения блока на графике 1005 для выбранного действия, например действия 1020, выше девяносто процентов определенного верхнего положения. Если это так, обработка следует по ответвлению "ДА", до этапа 1240, на котором оператор должен пройти дополнительное обучение или оператор буровой установки может быть подвергнут дисциплинарному взысканию за подъем блока 38 слишком близко к положению выхода за верхнюю раму. Обработка затем продолжается от этапа 1240 до этапа КОНЕЦ. С другой стороны, если пики данных положения блока не превышают девяносто процентов, обработка следует по ответвлению "НЕТ" до этапа КОНЕЦ.
Рассмотрим теперь фиг.13 и 14, на которых представлены примерные отображения 1300 и 1400 графиков скорости кодера для оценки скорости блока 38 в установке 20 для ремонта скважин, и описаны в соответствии с одним примерным вариантом воплощения настоящего изобретения. Как можно видеть на фиг.1, 6, 13 и 14, примерное отображение 1300 можно рассматривать на дисплее 610, и оно может включать в себя график 1305 скорости кодера. По оси Х на графике 1305 скорости кодера представлено время, и по оси Y представлена величина подсчета импульсов кодера 71 в течение определенного периода времени, в данном примере величина подсчета за секунду; однако для специалиста в данной области техники будет понятно, что можно использовать другие периоды времени.
График 1305 также может представлять информацию о направлении движения кодера 71. Например, график 1305 включает в себя линию 1310 нулевой величины подсчета. Данные подсчета, находящиеся выше линии 1310 нулевого подсчета, такие как представлены в позиции 1315, показывают, что кодер 71 принимал импульсные показания в одном направлении, в то время как данные, представляющие величины подсчета ниже линии 1310, такие как представлены в позиции 1320, показывают, что кодер принимал импульсы, относящиеся к другому направлению движения. В одном примерном варианте воплощения положительные данные величины подсчета импульсов на графике 1305 показывают, что блок 38 поднимается, в то время как отрицательные данные величины подсчета импульсов обозначают, что блок 38 опускается, однако положительные/отрицательные величины можно легко поменять местами, не выходя за пределы объема настоящего изобретения. Кроме того, в одном примерном варианте воплощения, нулевое положение на графике 1305 обозначает, что блок 38 остановлен и ни поднимается, ни опускается.
Оператор установки 20 для ремонта скважин, контролер и другая третья сторона может увеличить представление данных на графике 1305, как показано в примерном отображении 1400 на фиг.14. На графике 1405, показанном на фиг.14, оператор может лучше анализировать отдельный пик от точки 1415 до точки 1410 для анализа скорости блока путем анализа графика 1405 скорости кодера.
На фиг.15 показана логическая блок-схема последовательности операций, иллюстрирующая примерный способ 1500 определения скорости блока 38 в установке 20 для ремонта скважин, путем оценки данных скорости кодера на графике 1405 скорости кодера, представленном на дисплее 610. Как показано на фиг.1, 6, 14 и 15, примерный способ 1500 начинается на этапе НАЧАЛО и продолжается до этапа 1505, где оператор, контролер или другая третья сторона оценивает график 1405 скорости кодера на дисплее 610. На этапе 1510 оценщик выбирает точку данных скорости кодера на графике 1405 для определения скорости блока 38. В одном примерном варианте воплощения оценщик может выбрать пик данных скорости кодера, такой как пик 1415.
Оценщик определяет величину подсчета импульсов за период времени для выбранной точки данных скорости кодера на графике 1405 на этапе 1515. В одном примерном варианте воплощения пик 1415 имеет величину подсчета скорости приблизительно 7000 импульсов подсчета в секунду. Для специалиста в данной области техники будет понятно, что при дополнительном увеличении данных на графике 1405, представленном в устройстве 610 дисплея, может быть получена более точная величина подсчета данных скорости кодера. На этапе 1510 оценщик определяет направление движения блока 38 путем оценки графика 1405 для определения, находится ли выбранная точка 1415 данных выше или ниже нуля. В данном примерном варианте воплощения точка 1415 данных находится выше нуля и, на основе предшествующей примерной информации, поскольку она находится выше нуля, оценщик знает, что блок 38 поднимается.
На этапе 1525 оценщик определяет размер сердечника барабана 36 подъемника труб для определения окружности барабана 36, на который наматывают трос 37. В одном примерном варианте воплощения размер сердечника или диаметр барабана 36 составляет два фута. Оценщик делит количество подсчитанных импульсов в выбранной точке 1415 данных на количество импульсов, зарегистрированных в кодере 71 для каждого оборота барабана 36, на этапе 1530. В одном примерном варианте воплощения кодер 71 регистрирует 1440 импульсов на каждый оборот барабана 36. В этом примерном варианте воплощения результат составил бы приблизительно 4,86 оборотов в секунду.
На этапе 1535 оценщик определяет длину окружности сердечника барабана, на основе диаметра сердечника барабана, и умножает количество оборотов за период времени на длину окружности сердечника барабана. В примерном варианте воплощения, описанном выше, длина окружности составляет приблизительно 6,28 футов, которые, будучи умножены на 4,86 оборотов в секунду, дают результат 30,5 футов в секунду. На этапе 1540 вырабатывают запрос для определения, установлена ли на установке 20 оснастка талевой системы с обратным загибом троса. Если это так, обработка следует по ответвлению "ДА", на этап 1545, где произведение скорости блока удваивают, поскольку на установке с с обратным загибом троса барабан 36 разматывается с удвоенной скоростью, по сравнению со скоростью вращения барабана 36. Если установка с обратным загибом троса не используется, обработка следует по ответвлению "НЕТ" до этапа 1550.
На этапе 1550 вырабатывается запрос для определения, работает ли установка 20 с оснасткой талевой системы с четырьмя тросами. В то время как в примерном варианте воплощения описывается расчет скорости блока 38 для установки с четырьмя тросами и с обратным загибом троса, для специалистов в данной области техники будет понятно, что в установке 20, в качестве альтернативы, может использоваться оснастка талевой системы с шестью тросами или восемью тросами, и специалист в данной области техники мог бы, без каких-либо экспериментов, рассчитать скорость блока 38, зная соотношения для разных установок оснастки талевой системы и конфигурации установки 20. Блоки 38, в которых используются четыре троса, имеют механическое преимущество два к одному по сравнению с барабаном 36, и поэтому скорость блока 38 составляет только половину скорости троса 37, разматываемого с барабана 36. Если в буровой установке 20 используются четыре троса в оснастке талевой системы для блока 38, обработка следует по ответвлению "ДА" до этапа 1555, где произведение скорости блока делят на два для получения фактической скорости блока. Обработка продолжается от этапа 1555 до этапа КОНЕЦ. С другой стороны, если в буровой установке 20 не используется оснастка талевой системы с четырьмя тросами, обработка следует по ответвлению "НЕТ" до этапа КОНЕЦ.
Хотя изобретение было описано со ссылкой на предпочтительный вариант его воплощения, для специалистов в данной области техники будет понятно, что различные его модификации находятся в пределах объема изобретения. Поэтому объем изобретения требуется определять со ссылкой на следующую формулу изобретения. Из предыдущего описания будет понятно, что вариант воплощения настоящего изобретения преодолевает ограничения предшествующего уровня техники. Для специалиста в данной области техники будет понятно, что настоящее изобретение не ограничивается каким-либо специально описанным вариантом применения, и что варианты выполнения, описанные здесь, являются иллюстративными и не ограничительными. Из описания примерных вариантов воплощения для специалиста в данной области техники будут понятны эквиваленты элементов, представленных здесь, и способы построения других вариантов воплощения настоящего изобретения будут очевидны для человека - практика в данной области техники. Поэтому объем настоящего изобретения должен быть ограничен только следующей формулой изобретения.
Реферат
Предложенная группа изобретений относится к нефтегазодобывающей промышленности, в частности к системам контроля положения подвижного блока установки для ремонта скважин в процессе спускоподъемных операций. Техническим результатом является снижение риска возникновения аварийной ситуации при осуществлении спускоподъемных операций в процессе ремонта скважины. Способ работы блока на установке для ремонта скважин на основе анализа графика данных положения блока содержит следующие этапы: при подъеме труб из скважины выполняют оценку первой точки данных на графике данных положения блока; определяют, извлек ли блок отрезок трубы из скважины; определяют, находится ли первая точка данных близко к верхнему предельному значению на графике данных положения блока; и разрешают движение блока для извлечения отрезка трубы из скважины, в случае отрицательного результата, или останавливают блок - в случае положительного результата. Таким образом, оператор установки может получать и отслеживать на дисплее данные о положении блока во время вставки и удаления насосных штанг или эксплуатационных труб. Данные предоставляются оператору в режиме реального времени на дисплее в виде графика относительно максимального и минимального положений, введенных оператором, что помогает оценивать положения блока до того, как он выйдет в положение за пределами верхней рамы или за пределами пола установки для ремонта скважин. При этом данная технология позволяет оператору определять скорость блока во время работы, путем оценки данных скорости кодера, предоставляемых графиком скорости кодера. 5 н. и 14 з.п. ф-лы, 15 ил.
Комментарии