Способ и устройство для измерения геометрической структуры оптического компонента - RU2618746C2
Код документа: RU2618746C2
Чертежи



Описание
Область изобретения
Объектом настоящего изобретения является способ и система для измерения геометрической или оптической структуры оптического компонента.
Способ согласно изобретению обеспечивает возможность абсолютного измерения двух поверхностей оптического компонента. Под абсолютным измерение следует понимать измерение, для которого не требуется никаких предварительных сведений о компоненте, за исключением его коэффициента преломления. Измерение поверхностей допускает многочисленные применения в промышленности. В частности, оно полезно в области офтальмологии для проверки или измерения глазных линз; в этом случае изготовление сложных поверхностей требует одновременного определения сотен коэффициентов.
Предпосылки изобретения
Целью этого раздела является познакомить читателя с разнообразными аспектами из уровня техники, которые могут иметь отношение к различным аспектам настоящего изобретения, которые описаны и/или заявлены ниже в настоящем документе. Этот обзор рассматривается как полезный для предоставления читателю дополнительной информации с целью обеспечения лучшего понимания различных аспектов настоящее изобретения. Следовательно, необходимо понимать, что эти утверждения следует толковать в таком контексте, а не в качестве описания предыдущего уровня техники.
В документе ЕР-А-0644411 на имя заявителя описывается устройство дефлектометрии в отраженном или проходящем свете. Это устройство позволяет осуществлять измерение геометрической структуры оптического компонента на основании отражения или прохождения света. Принцип такого измерительного устройства заключается в освещении оптического компонента, подлежащего измерению, путем излучения известного волнового фронта - в наиболее простом случае в виде плоской волны - и для измерения волнового фронта после отражения или прохождения на оптический компонент, подлежащий измерению. Измерение волнового фронта после отражения или прохождения дает возможность получить геометрические характеристики компонента, подлежащего измерению.
Таким образом, определение геометрии одной поверхности компонента известно, при этом геометрия другой поверхности компонента принимается как известная для расчетов. Следовательно, существует необходимость в измерительном устройстве, которое дает возможность определять различные характеристики оптического компонента и, в частности, его двух поверхностей. Такое устройство дает возможность, в частности, эффективно измерять прогрессивные глазные линзы путем точного определения формы каждой из их двух поверхностей и идеального расположения одной поверхности по отношению к другой без необходимости в формулировке какого-либо предположения об одной из этих поверхностей.
В документе FR-2813391 А1, также на имя заявителя, описывается способ измерения геометрической структуры оптического компонента, в котором осуществляют пару измерений в проходящем свете оптического компонента. Но точность реконструированной геометрической структуры не всегда является удовлетворительной, потому, что в каждом из двух измерений сочетаются эффекты двух пересеченных поверхностей.
Также известен документ DE 102004047531, согласно которому осуществляются два интерферометрических измерения: одно является измерением в отраженном, а другое является измерением в проходящем свете - для определения топографии поверхности и внутреннего распределения коэффициента преломления в живом организме (клетке или группе клеток). Однако, безусловно, для получения абсолютного результата, который дает возможность перевести измерение фазового изменения отраженной или проходящей оптической волны на карту высот или изменений коэффициента преломления, измерение, описанное в этом документе, априори требует сведений о топографии или распределения коэффициентов преломления в организме.
Более того, известно измерение поверхностей оптического компонента с помощью измерительного средства с механическим или оптическим датчиком, работающего по точкам, по поверхностям или одновременно в точке каждой из двух поверхностей. Однако длительность измерения поверхности является значительной, и всегда трудно позиционировать измерение первой поверхности по отношению ко второй поверхности. Кроме того, измерительное средство, работающее по точкам, в целом требует весьма точного средства для перемещения (механического или оптического) датчика, что делает его сравнительно дорогим в отношении приобретения и обслуживания и сложным для размещения на промышленной площадке.
Краткое описание изобретения
Целью настоящего изобретения является устранение упомянутых выше недостатков, и согласно ему предлагается определять геометрическую структуру оптического компонента на основании двух неразрушающих измерений. По меньшей мере одно из этих измерений осуществляется в зональном режиме или в многоточечном режиме (противоположном «поточечному» режиму, упомянутому выше), и по меньшей мере одно из этих измерений осуществляется на основании сигнала одной MS1, возникающего из преобразования отдельной, одной из поверхностей сигнала от датчика, при этом каждая из этих поверхностей не является известной априори. Это определение, кроме того, основывается на числовой реконструкции каждой из поверхностей компонента на основании указанных измерений.
В соответствии с изобретением эта цель достигается на основании признаков, изложенных в пункте 1 формулы изобретения, согласно первому аспекту и на основании признаков, изложенных в пункте 14 формулы изобретения, согласно второму аспекту.
В зависимых пунктах формулы изобретения представлены предпочтительные концепции и усовершенствования изобретения.
Согласно первому аспекту изобретение относится к способу измерения геометрической структуры компонента, ограниченного первой поверхностью 10 и второй поверхностью 20, при этом указанный способ включает этапы:
S1 измерения первого сигнала MS1, возникающего из первого преобразования указанной первой поверхностью 10 первого сигнала PS1 от датчика, при этом первое моделирование указанного первого преобразования обеспечивает возможность получения первой оценки ES1 сигнала, возникающего из указанного первого преобразования первого сигнала PS1 от датчика по меньшей мере одной первой смоделированной поверхностью 11, известной и расположенной в первой системе R1 отсчета для измерения, подобно указанной первой поверхности 10, во время измерения первого сигнала MS1;
S2 измерения второго сигнала MS2, возникающего из второго преобразования по меньшей мере указанной второй поверхностью 20 второго сигнала PS2 от датчика, при этом второе моделирование указанного второго преобразования обеспечивает возможность получения второй оценки ES2 сигнала, возникающего из указанного второго преобразования второго сигнала PS2 от датчика по меньшей мере одной второй смоделированной поверхностью 21, известной и расположенной во второй системе R2 отсчета для измерения, подобно указанной второй поверхности 20, во время измерения второго сигнала MS2;
при этом по меньшей мере одно измерение из измерения первого сигнала MS1 и измерения второго сигнала MS2 является зональным измерением;
S3 определения третьего преобразования, обеспечивающего возможность перехода от первой системы R1 отсчета ко второй системе R2 отсчета;
S10 оценки указанной первой поверхности 10, осуществляемой на основании первого сигнала MS1, указанного первого моделирования и первого показателя качества V1, определяющего расхождение между оценкой ES1 и первым сигналом MS1;
S20 оценки указанной второй поверхности 20, осуществляемой на основании второго сигнала MS2, указанного второго моделирования, указанного третьего преобразования и второго показателя качества V2, определяющего расхождение между оценкой ES2 и вторым сигналом MS2.
Согласно второму аспекту изобретение относится к системе для измерения геометрической структуры компонента, ограниченного первой поверхностью 10 и второй поверхностью 20, при этом указанная система содержит:
- первое измерительное средство ММ1 для измерения первого сигнала MS1, возникающего из первого преобразования по меньшей мере указанной первой поверхностью 10 первого сигнала PS1 от датчика, при этом первое моделирование указанного первого преобразования обеспечивает возможность получения первой оценки ES1 сигнала, возникающего из указанного первого преобразования первого сигнала PS1 от датчика по меньшей мере одной первой смоделированной поверхностью 11, известной и расположенной в первой системе R1 отсчета для измерения, подобно указанной первой поверхности 10 во время измерения первого сигнала MS1;
- второе измерительное средство ММ2 для измерения второго сигнала MS2, возникающего из второго преобразования второго сигнала PS2 от датчика по меньшей мере указанной второй поверхностью 20, при этом второе моделирование указанного второго преобразования обеспечивает возможность получения второй оценки ES2 сигнала, возникающего из указанного второго преобразования второго сигнала PS2 от датчика по меньшей мере одной второй смоделированной поверхностью 21, известной и расположенной в первой системе R2 отсчета для измерения, подобно указанной второй поверхности 20, во время измерения второго сигнала MS2;
при этом по меньшей мере с помощью одного из указанных измерительных средств ММ1, ММ2 проводится зональное измерение;
- средство MD для определения третьего преобразования, обеспечивающего возможность перехода от первой системы R1 отсчета ко второй системе R2 отсчета;
- первое средство СМ1 для расчета, предназначенное для оценки указанной первой поверхности 10 на основании первого сигнала MS1, указанного первого моделирования, первой смоделированной поверхности 11 и первого показателя качества V1, определяющего расхождение между первой оценкой ES1 и первым сигналом MS1;
- второе средство СМ2 для расчета, предназначенное для оценки указанной второй поверхности 20 на основании второго сигнала MS2, указанного второго моделирования, второй смоделированной поверхности 21, указанного третьего преобразования и второго показателя качества V2, определяющего расхождение между второй оценкой ES2 и вторым сигналом MS2.
Способ согласно изобретению обеспечивает преимущество в отношении осуществления определения структуры компонента, которое происходит очень быстро по отношению к существующим способам прямого измерения с применением механических или оптический средств (например, поточечного измерения с помощью механического или оптического датчика и т.п.).
Предпочтительно результаты по меньшей мере одного зонального или «многоточечного» измерения (например измерения первого сигнала) сами по себе могут быть получены на основании сбора результатов ограниченного количества измерений элементарных зон. В каждом из этих измерений элементарных зон измеряется первый элементарный сигнал, возникающий из первого преобразования зоной первой поверхности 10 первого сигнала PS1 от датчика. При этом все зоны в совокупности покрывают первую поверхность. В этом случае необходим этап сложения результатов измерений элементарных зон. Это дает возможность получения одним и тем же измерительным средством ММ1 оценки первой поверхности, которая является более точной, чем при осуществлении зонального измерения одним захватом, при этом зональное измерение, осуществляемое путем сбора результатов ограниченного числа измерений элементарных зон, остается более быстрым и более простым для проведения, чем поточечное измерение.
Более того, является возможным реализовать способ согласно изобретению путем проведения двух измерений, осуществляемых на каждой из поверхностей самой разной природы. Первое измерение является, например, измерением в отраженном свете, а второе измерение осуществляется, например, в проходящем свете. Однако возможны другие геометрии, такие как отражение/отражение. Подобным образом, первое измерение является дефлектометрическим измерением, основанным на отражении полос, а второе измерение является измерением, подобном измерению, основанном на методе Гартмана, но в качестве альтернативы первое измерение с таким же успехом может быть измерением искажения оптического сигнала, отраженного первой поверхностью, а второе измерение является измерением усиления, или увеличения, оптического сигнала, исходящего от первой и второй поверхности.
Таким образом, способ согласно изобретению также характеризуется преимуществом, заключающимся в возможности его реализации на основании существующих устройств, предназначенных для проведения измерений поверхностей, но не содержащих какого-либо средства для расчета с целью реконструкции этих поверхностей в исходной точке, которая не связанна с ними.
Третье преимущество способа согласно изобретению связано с формой, на основании которой осуществляется определение структуры: этапы реконструкции поверхностей, представленные ниже, включают представление поверхностей в аналитической форме. Кроме того, структура компонента, такая как представленная в способе согласно изобретению, показана в аналитической форме: это особенно удобно для последующего применения структуры, оцененной средствами числового моделирования.
Четвертое преимущество способа согласно изобретению заключается в высокой точности, которую оно дает возможность получить в ходе оценки высот поверхностей оптического компонента, несмотря на то что амплитуда колебания высот является значительной, и априори не требуются сведения о какой-либо из этих поверхностей.
Различные варианты осуществления изобретения находят применение в измерении или проверке механически обработанных деталей, например глазных линз. В этом случае изготовление сложных поверхностей требует одновременного определения сотен коэффициентов.
Краткое описание графических материалов
Изобретение можно лучше понять и проиллюстрировать посредством вариантов осуществления и примеров выполнения, представленных ниже, совершенно без какого-либо ограничения и со ссылками на прилагаемые фигуры, где:
на фигуре 1 показана блок-схема способа измерения согласно варианту осуществления изобретения;
на фигуре 2 представлено приведенное в качестве примера измерение первого сигнала MS1, осуществляемое по указанному способу согласно варианту осуществления изобретения;
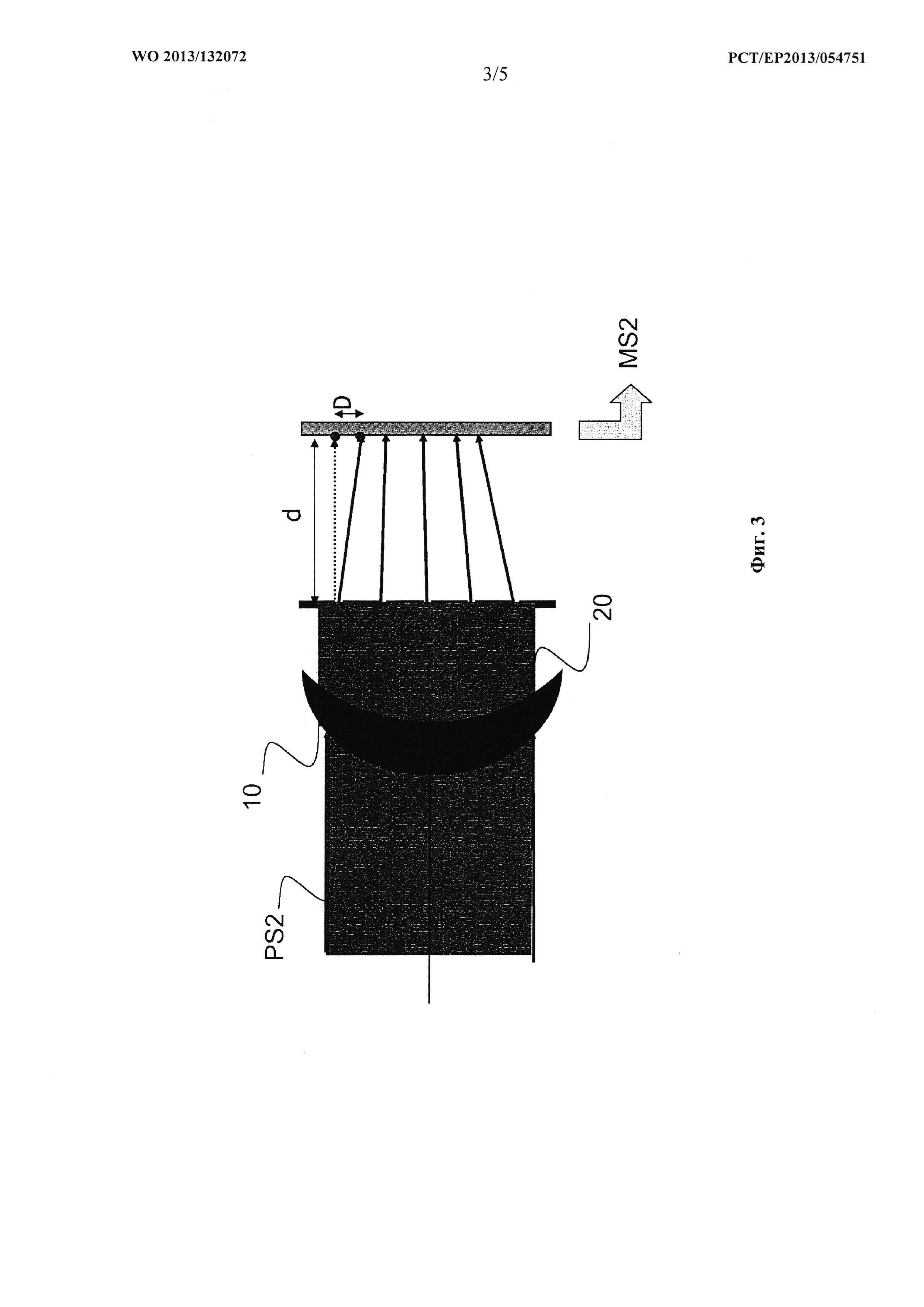
на фигуре 3 представлен приведенный в качестве примера этап измерения второго сигнала MS2, осуществляемого по указанному способу согласно варианту осуществления изобретения;
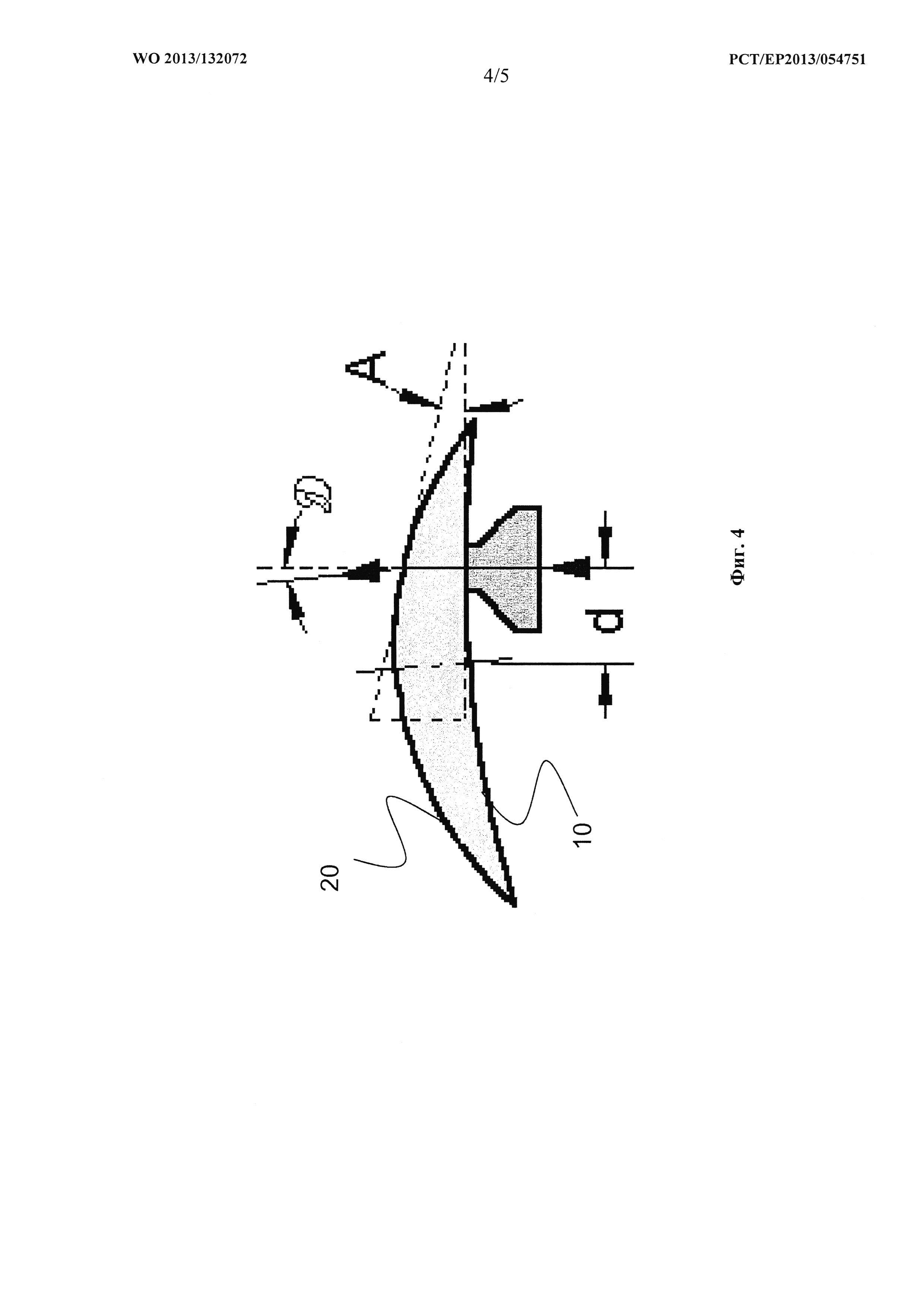
на фигуре 4 представлен приведенный в качестве примера этап определения третьего преобразования, осуществляемого по указанному способу согласно варианту осуществления изобретения;
на фигуре 5 схематически представлен вариант осуществления системы для измерения структуры компонента согласно варианту осуществления изобретения.
Подробное описание предпочтительных вариантов осуществления
Следует понимать, что числовые величины и описание настоящего изобретения были упрощены с целью иллюстрации элементов, которые являются важными для однозначного понимания настоящего изобретения, при этом с целью обеспечения ясности были удалены многие другие элементы, встречающиеся в способах измерения, основанного на реконструкции поверхностей оптического компонента. Тем не менее, поскольку эти элементы являются хорошо известными из уровня техники, подробное рассмотрение этих элементов в настоящем документе не предусмотрено. Настоящее описание направлено на все эти варианты и модификации, известные специалисту в данной области техники.
На фигуре 1 показана блок-схема, включающая 5 этапов способа измерения геометрической структуры компонента согласно варианту осуществления изобретения. Далее эти пять этапов объясняются и подробно рассматриваются в отношении измерения геометрической структуры глазной линзы, содержащей первую поверхность 10, например выпуклую, и вторую поверхность 20, например вогнутую.
Предпочтительно оптическим компонентом является глазная линза. Предпочтительно, оптическим компонентом является прогрессивная глазная линза.
Этап S1: измерение первой поверхности 10 способом отражения полос
Как представлено на фигуре 2, решетку PS1 из чередующихся полос, состоящую, например, из ярко освещенных полос шириной L, равномерно освещенных белым светом и отделенных друг от друга неосвещенными полосами шириной L, проецируют на первую поверхность 10 компонента. Решетка из полос отражается поверхностью 10, и образуется искаженное изображение решетки. Это изображение захватывают устройством для захватывания изображения, например цифровой камерой, чувствительной к свету в видимом спектре. Это изображение (или набор из нескольких изображений) применяют для расчета карты MS1 направлений, перпендикулярных к поверхности 10 в выбранном числе ее точек. Таким образом, преобразование Т1 дает возможность перехода от сигнала PS1 к карте MS1 «измеренных» нормалей к поверхности 10. Получить первую абсолютную оценку ES1 нормалей для известной основной поверхности дает возможность моделирование. Употребление определения «абсолютная» предназначено указывать на то, что оценка дает возможность получить недвусмысленный результат. Это не так, например, в отношении интерферометрического измерения на основании геометрии отражения на первую поверхность, осуществляемого при длине волны λ. Поскольку такой тип измерения основан на измерении фазового изменения, его моделирование дает возможность получения только карты высот первой поверхности, которая не является однозначной, по модулю λ: оценка в этом случае не является абсолютной. Карта MS1 измеренных нормалей составляет объект задачи реконструкции, которая решается путем оптимизации на последующем этапе S10 на основании сведений, полученных в результате моделирования, что делает возможным получение первой абсолютной оценки.
Разумеется, настоящее изобретение не ограничивается вариантом осуществления, описанным в виде примера; таким образом, для измерения первого сигнала MS1 является возможным применение способов, отличных от дефлектометрии отражаемых полос, таких как например способ дефлектометрии проектируемых полос или применение дифракционной решетки Ронки.
Предпочтительно измерение первого сигнала MS1 является зональным или многоточечным измерением. Конкретнее, измерение сигнала MS1, возникающего в результате первого преобразования сигнала от датчика, одновременно на основании нескольких точек первой поверхности оптического компонента в настоящем документе называется «зональным» или «многоточечным».
В первом варианте осуществления первая поверхность 10 освещается решеткой из полос, и площадь этой решетки превышает размер первой поверхности 10. Таким образом, зональное измерение дает возможность измерения всей поверхности 10 на одном коротком и простом этапе.
Предпочтительно результат зонального измерения может быть получен путем сбора результатов измерений элементарных зон, осуществляемых, например, с применением решетки из полос, как описано выше, путем освещения только части первой поверхности, называемой «элементарной зоной». При измерении элементарных зон измеряют сигнал, возникающий из отражения решетки из полос элементарной зоной. Измерения элементарных зон повторяют до тех пор, пока элементарные зоны не покроют всю первую поверхность. Результаты зонального измерения получают путем сложения результатов измерений различных элементарных зон.
Пример этого второго варианта осуществления в случае зонального измерения, осуществленного на основании измерений двух элементарных зон, может быть описан следующим образом: первую поверхность 10 освещают решеткой из полос, площадь которой меньше, чем общая площадь первой поверхности 10. Предполагается, например, что решетка из полос покрывает 60% площади первой поверхности 10. Измерение первой элементарной зоны осуществляют, как указано выше в данном документе, в первой элементарной зоне Z1, составляющей 60% первой поверхности, покрываемой решеткой для первого положения первой поверхности по отношению к решетке. Для измерения всей первой поверхности 10 указанную первую поверхность 10 после этого смещают по отношению к решетке, чтобы последняя проектировалась на другую часть поверхности 10 и покрывала вторую элементарную зону Z2, например зону, покрывающую, в свою очередь, 60% площади первой поверхности, но при этом элементарные зоны Z1 и Z2 перекрывают друг друга на площади, составляющей 20% общей площади первой поверхности. Для осуществления этих измерений двух элементарных зон также является возможным смещение измерительной головки, проецирующей сигнал от датчика на вторую элементарную зону после проецирования его на первую зону Z1. Наконец, осуществляют сложение результатов измерений двух элементарных зон, чтобы получить результат измерения первого сигнала SM1 на основании сигнала от датчика, полученного с помощью решетки из полос. Сложение выполняют в числовом виде с поиском возможности максимизировать автокорреляционную функцию сигнала SM1 в зоне взаимного перекрывания двух элементарных зон Z1 и Z2. В этом случае появляется одно ограничение: необходимо, чтобы зона перекрывания элементарных зон друг друга содержала информацию, которой достаточно для получения хорошей автокорреляционной функции.
Такое взаимное перекрывание элементарных зон не является необходимым в случае, если первую поверхность 10 снабжают системой отсчета, оптической или механической, обеспечивающей возможность простого позиционирования одного из измерений элементарных зон по отношению к другому, как, например, для монофокальной линзы.
Предпочтительно количество измерений элементарных зон, при котором является возможным осуществление зонального измерения одной из поверхностей компонента, не превышает 10.
У этого второго варианта осуществления, который не ограничивается типом измерения отражения решетки из полос, есть преимущество, заключающееся в предоставлении возможности осуществления зонального измерения в несколько захватов, в определенных применениях в возможности измерения поверхности, обладающей большой площадью, посредством одного и того же сигнала от датчика, а также в получении еще большей точности зонального измерения.
Этап S2: измерение в проходящем свете, сквозь первую и вторую поверхность способом на основании метода Гартмана
Как показано на фигуре 3, оптический пучок с параллельными лучами PS2 посылают сквозь поверхности 10 и 20 измеряемого компонента. Лучи, составляющие пучок, подвергают отклонению, связанному с преломлением на двух поверхностях 10, 20 компонента. Часть лучей, отклоненных таким образом, после этого проходит сквозь матрицу из отверстий для образования дополнительных пучков, которые наконец перехватывают экраном. Изображение на экране захватывают устройством для захватывания изображения, например цифровой камерой, чувствительной к свету в видимом спектре; получают перемещения дополнительных пучков, переведенные в отклонения характеристики лучей падающего света оптического эффекта измеренного компонента. С помощью известных методов обработки, применяемых к захваченному изображению, эти смещения переводят в карту MS2 нормалей к волновому фронту, исходящему от компонента. Таким образом, преобразование Т2 обеспечивает возможность прохождения сигнала PS2 к карте MS2 «измеренных» отклонений.
Сведения об отклонении лучей связаны с моделированием поведения системы измерения типа системы Гартмана. Моделирование отклонения лучей света посредством компонента, имеющего две известные поверхности, на основании такого моделирования дает возможность получить абсолютную оценку отклонений, получаемую для этого компонента. Осуществляемое второе измерение отличается тем, что моделирование его прохождения делает возможным получение абсолютной оценки поверхностей компонента. Карта MS2 измеренных отклонений составляет объект задачи реконструкции, решаемой путем оптимизации на последующем этапе S20.
Разумеется, настоящее изобретение не ограничивается вариантом осуществления, описанным в виде примера; таким образом, для измерения второго сигнала MS2 является возможным применение способов, отличных от дефлектометрии по Гартману в проходящем свете, таких как, например, способ дефлектометрии Шака-Гартмана на основании Шлирен-метода или на основании метода полос в проходящем свете.
В первом варианте осуществления первый сигнал MS1 возникает из первого преобразования указанной первой поверхностью 10 первого сигнала PS1 от датчика; и второй сигнал MS2 возникает из второго преобразования указанной первой поверхностью 10 и указанной второй поверхностью 20 второго сигнала PS2 от датчика.
Во втором варианте осуществления первый сигнал MS1 возникает из первого преобразования указанной первой поверхностью 10 первого сигнала PS1 от датчика; и второй сигнал MS2 возникает из второго преобразования указанной второй поверхностью 20 второго сигнала PS2 от датчика.
Предпочтительно первый и/или второй сигнал PS1, PS2 от датчика является оптическим сигналом.
Предпочтительно первый сигнал MS1 является картой нормалей к первой поверхности 10, полученной в результате дефлектометрического измерения оптического сигнала, получаемого в виде решетки из чередующихся полос, отраженной первой поверхностью 10, и этап S2 измерения второго сигнала MS2 заключается в дефлектометрическом измерении оптического сигнала, исходящего от первой и второй поверхности 10, 20.
Предпочтительно этап S1 измерения первого сигнала MS1 заключается в измерении искажения оптического сигнала, отраженного от первой поверхности 10, и этап S2 измерения второго сигнала MS2 заключается в измерении усиления, или увеличения, оптического сигнала, исходящего от первой и второй поверхности 10, 20.
Предпочтительно измерение второго сигнала MS2 является зональным измерением.
Предпочтительно измерение первого сигнала MS1 и измерение второго сигнала MS2 являются зональными измерениями.
Предпочтительно указанное зональное измерение осуществляют путем сбора результатов измерений элементарных зон, где в каждом из указанных измерений элементарных зон измеряют элементарный сигнал, возникающий из преобразования элементарной зоной поверхности (или поверхностей) сигнала от датчика, чтобы указанные элементарные зоны покрывали всю указанную поверхность (или все указанные поверхности).
Предпочтительно этапы S1, S2 измерения осуществляют одним устройством.
Этап S3: определение третьего преобразования, обеспечивающего возможность перехода от первой системы R1 отсчета ко второй системе R2 отсчета
Если измерение первого сигнала MS1 в системе R1 отсчета осуществляют на основании отражения от первой поверхности 10, то на основании этого первого измерения SM1 можно получить лишь реконструкцию первой поверхности 10. Измерение MS2 второй поверхности осуществляют в системе R2 отсчета. Является необходимым, чтобы было известно преобразование для перехода от системы R1 отсчета к системе R2 отсчета. Этап реконструкции второй поверхности 20 на основании второго измерения MS2, осуществляемого в проходящем свете, сам по себе в целом не обеспечивает возможность расположения и ориентирования второй оцененной (или реконструированной) поверхности по отношению к первой оцененной поверхности. Для получения этого являются необходимыми сведения о третьем преобразовании, обеспечивающем возможность перехода от первой системы R1 отсчета, привязанной к измерению первого сигнала MS1, ко второй системе R2 отсчета, привязанной к измерению второго сигнала MS2.
В данном случае систему R1, R2 отсчета следует понимать в значении системы отсчета аффинного пространства, образованного началом отсчета и 3 независимыми направлениями. Поэтому третье преобразование является аффинным преобразованием, которое, следовательно, можно определить посредством вектора, отделяющего начало R1 отсчета от начала R2 отсчета, и матрицы поворота 3 порядка для отображения поворотов, необходимых для перехода от осей системы R1 отсчета к осям системы R2 отсчета.
В случае этого варианта осуществления сведения о третьем преобразовании включают в себя определение, которое является независимым от измерения первого и второго сигнала MS2.
Как показано на фигуре 4, третье преобразование может быть определено в точке отсчета: толщину в центре компонента измеряют, например, с помощью системы, в которой предусмотрено измерение с помощью механических или оптических средств. Это дает возможность установить расстояние между поверхностями 10 и 20 компонента в этой точке отсчета.
Этап S3 зависит от типа измерения, выполненного на этапах S1 и S2
Действительно, если измерение на этапах S1 и S2 относится к высотам (например, при измерении с помощью механических средств), то доступной информации достаточно для полной реконструкции поверхности.
Если измерение относится к данным порядка один (например, нормали или оптические отклонения), то имеет место неопределенность, и реконструкция может не осуществиться без задания высоты точки поверхности (задача реконструкции имеет бесконечное множество решений). Для решения этой проблемы измерение толщины в центре компонента дает возможность расположить в пространстве поверхность, подлежащую реконструкции.
В случае измерения порядка 2 (например, измерение кривизны или увеличения) существуют две неопределенности. Является необходимым задать высоту в точке поверхности и нормаль в точке поверхности для обеспечения единственности решения. Таким образом, для измерения толщины в центре компонента является возможным определение высоты второй поверхности, а также призмы компонента, которая указывает на нормаль ко второй поверхности.
Если призма измерена оптическим средством с помощью нормали к первой поверхности в виде падающего луча, то измерение призмы может интерпретироваться непосредственно как преобразование между первой поверхностью и второй поверхностью. Если измерение призмы выполняется с применением падающего луча, который не является перпендикулярным к первой поверхности, то призма зависит от второй поверхности. Следовательно, является необходимой одновременная реконструкция второй поверхности и ориентация второй поверхности в пространстве (при этом высота задается путем измерения толщины в центре). В последнем случае выполнение этапа S20, описанного ниже, приводит к одновременному определению третьего преобразования и второй поверхности 20.
Разумеется, настоящее изобретение не ограничивается вариантом осуществления, описанным в виде примера; таким образом, для определения третьего преобразования является возможным применение способов, отличных от указанных способов оптических измерений в проходящем свете, таких как, например, способ оптических измерений в отраженном свете, основанный на измерениях с помощью механических средств или основанный на других измерениях с помощью оптических средств.
Этапы S1, S2 измерения осуществляются на разных измерительных устройствах. Это делает необходимой общую исходную точку для измерений, чтобы расположить компонент в пространстве абсолютным образом. В случае этого варианта осуществления каждое из первого и второго измерения может осуществляться с помощью точечной системы микрокругов, которые выполнены на одной из поверхностей компонента, или в качестве альтернативы на основании общей механической исходной точки между системами измерений, которая, следовательно, обеспечивает расположение в эквивалентной системе отсчета в каждой из них. Соответственно, применяют, например, самоцентрирующийся механический зажим с заданным положением в пространстве.
Согласно одному варианту осуществления этап (S3) определения третьего преобразования включает измерение толщины компонента.
Согласно одному варианту осуществления этап (S3) определения третьего преобразования дополнительно включает измерение призмы компонента.
Этап S10: оценка первой поверхности 10, осуществляемая, в частности, на основании первого сигнала MS1
Цель первой реконструкции заключается в оценке первой поверхности 10 компонента. Рассматривают первую смоделированную поверхность 11, расположенную в пространстве при тех же условиях (положение и ориентация), что и первая поверхность 10 физического компонента в ходе измерения искажения решетки из полос. Система отсчета, в которой осуществляют измерение MS1, и в которой положение первой поверхности 10 и положение первой смоделированной поверхности 11 являются известными, называется R1.
Принцип реконструкции путем оптимизации известен сам по себе.
Определяют начальные величины для первой смоделированной поверхности 11, например, сферической формы. Моделирование преобразования сигнала PS1 смоделированной поверхностью 11 дает возможность для расчета оценки ES1 нормалей смоделированной поверхности 11.
Затем определяется показатель качества V1, который можно рассчитать для имеющихся величин смоделированной поверхности 11 компонента; этот показатель качества V1 предназначен для отображения минимальной или максимальной величины, если величины оценки ES1 измерения, осуществляемого на основании смоделированной поверхности 11, являются равными величинам измерения MS1.
Величина показателя качества дает возможность определения расхождения между моделированием измерения ES1 и измерением MS1. Для каждой точки измерения является возможным учитывать норму вектора, равную разности между вектором, обозначающим нормаль, получаемую в результате измерения, и вектором, обозначающим нормаль, получаемую в результате моделирования. Показателем качества может быть сумма квадратов норм векторов для всех точек измерения.
После этого смоделированную поверхность 11 модифицируют с применением алгоритма итеративной оптимизации, чтобы уменьшить показатель качества V1. Например, применяют алгоритм наименьших квадратов, такой как алгоритм Гаусса-Ньютона или алгоритм Левенберга-Марквардта, описанный в "Numerical Optimization", Bonnas et al., Springer 2003. При каждой итерации согласно алгоритму предлагается новая смоделированная поверхность 11; моделирование преобразования Т1 на основании этой новой смоделированной поверхности 11 дает возможность для расчета новой величины V1 показателя качества.
Итерационный процесс прерывается, например, если критерий остановки удовлетворяется, например при отсутствии возможности дальнейшего уменьшения величины, взятой в соответствии с показателем качества V1, а также если величина показателя качества V1 меньше заданной пороговой величиной. Таким образом, получают смоделированную поверхность 11, которая является правильной оценкой измеренной поверхности 10, поскольку расхождение между измерением и моделированием этого измерения посредством преобразования Т1 уменьшается.
Этап S20: оценка второй поверхности 20, осуществляемая, в частности, на основании первого сигнала MS2
Создают смоделированный компонент, первая поверхность которого является результатом реконструкции первой поверхности 10, оцененной на основании измерения MS1, и вторая поверхность которого является второй смоделированной поверхностью 21. Третье преобразование, определенное на этапе S3, является критерием для перехода от системы R1 отсчета, в которой отображается первая оцененная поверхность, к системе R2 отсчета, в которой именно положение второй поверхности 20 является точкой отсчета в ходе измерения, осуществляемого на этапе 2. Это третье преобразование дает возможность создавать смоделированный компонент в пространстве и располагать его фактически при тех же условиях, что и компонент (физическую часть), в ходе измерения, осуществляемого на этапе S2.
Моделирование преобразования Т2 сигнала PS2 этим начальным смоделированным компонентом позволяет рассчитать оценку второго сигнала, то есть известно, как получить на основе этого расчета карту отклонения (дополнительных пучков сигнала PS2 от датчика), созданную на основании смоделированного компонента.
Для каждой точки этой карты отклонений является возможным учитывать норму вектора, равную разности между измеренным отклоненным вектором и моделируемым отклоненным вектором. Сумма квадратов этих норм может быть показателем качества.
После этого смоделированную поверхность 21 компонента модифицируют алгоритмом итеративной оптимизации, чтобы уменьшить величину показателя качества V2. С этой целью может применяться алгоритм наименьших квадратов, такой как алгоритм Гаусса-Ньютона или алгоритм Левенберга-Марквардта ("Numerical Optimization", Bonnas et al., Springer, 2003). При каждой итерации согласно алгоритму предлагается новая смоделированная поверхность 21; моделирование преобразования Т2 при этой новой поверхности 21 дает возможность для расчета новой величины V2 показателя качества. Итерационный процесс останавливается, например, при отсутствии возможности дальнейшего уменьшения величины показателя качества, а также если величина показателя качества меньше заданной пороговой величиной. Таким образом, получают смоделированную поверхность 21, которая является оценкой Е2 измеренной поверхности 20, поскольку расхождение между измерением и моделированием этого измерения посредством преобразования Т2 мало.
Предпочтительно, каждый этап S10, S20 оценки является итеративным, при этом каждая итерации состоит в:
а) осуществлении моделирования SIM1, SIM2 на основании по меньшей мере одной смоделированной поверхности 11, 21 и сигнала PS1, PS2 от датчика для получения оценки ES1, ES2 измеренного сигнала;
b) измерении расхождения между оценкой ES1, ES2, рассчитанной на этапе а), и измеренным сигналом MS1, MS2 посредством показателя качества V1, V2;
c) модификации смоделированной поверхности 11, 21 для уменьшения указанного расхождения и возврата к этапу а) при неудовлетворении критерия остановки в виде расхождения, измеренного на этапе b);
d) оценке поверхности 10, 20 в качестве величины смоделированной поверхности 11, 21, учтенной на этапе а) этой итерации.
Предпочтительно оценку 21 указанной второй поверхности 20 также получают на основании оценки 11 указанной первой поверхности 10.
Предпочтительно этапы S10, S20 оценки включают этап, на котором смоделированную поверхность 11, 21 отображают в аналитической форме. Преимущество, предоставляемое на этом этапе, заключается в ускорении расчетов и в конечном итоге в обеспечении оценки геометрической структуры компонента в том виде, в котором с ней легко работать во время последующих числовых расчетов.
На фигуре 5 в схематическом виде представлена система для измерения геометрической структуры компонента, ограниченного первой поверхностью 10 и второй поверхностью 20; при этом указанная система содержит:
- первое измерительное средство ММ1 для измерения первого сигнала MS1, возникающего из первого преобразования по меньшей мере указанной первой поверхностью 10 первого сигнала PS1 от датчика, при этом первое моделирование указанного первого преобразования обеспечивает возможность получения первой оценки ES1 сигнала, возникающего из указанного первого преобразования первого сигнала PS1 от датчика по меньшей мере одной первой смоделированной поверхностью 11, которая является известной и расположенной в первой системе R1 отсчета для измерения, подобно указанной первой поверхности 10, во время измерения первого сигнала MS1;
- второе измерительное средство ММ2 для измерения второго сигнала MS2, возникающего из второго преобразования по меньшей мере указанной второй поверхностью 20 второго сигнала PS2 от датчика, при этом второе моделирование указанного второго преобразования обеспечивает возможность получения второй оценки ES2 сигнала, возникающего из указанного второго преобразования по меньшей мере одной второй смоделированной поверхностью 21 второго сигнала PS2 от датчика, которая является известной и расположенной в первой системе R2 отсчета для измерения, подобно указанной второй поверхности 20, во время измерения второго сигнала MS2;
- средство MD для определения третьего преобразования, обеспечивающего возможность перехода от первой системы R1 отсчета ко второй системе R2 отсчета;
- первое средство СМ1 для расчета, предназначенное для оценки указанной первой поверхности 10 на основании первого сигнала MS1, указанного первого моделирования, первой смоделированной поверхности 11 и первого показателя качества V1, определяющего расхождение между первой оценкой ES1 и первым сигналом MS1;
- второе средство СМ2 для расчета, предназначенное для оценки указанной второй поверхности 20 на основании второго сигнала MS2, указанного второго моделирования, второй смоделированной поверхности 21, указанного третьего преобразования и второго показателя качества V2, определяющего расхождение между второй оценкой ES2 и вторым сигналом MS2.
В примере, представленном на фигуре 5, оценка первой поверхности 10 служит для оценки второй поверхности 20. Предпочтительно первым средством СМ1 для расчета проводится измерение искажения оптического сигнала, отраженного от первой поверхности 10; и вторым средством СМ2 для расчета проводится измерение усиления или увеличения оптического сигнала, исходящего от первой и второй поверхности 10, 20.
В качестве альтернативы первое средство (СМ1) для расчета создает карту нормалей к первой поверхности (10), полученной дефлектометрическим измерением оптического сигнала, получаемого в виде решетки из чередующихся полос, отраженной первой поверхностью (10); и
- вторым средством (СМ2) для расчета проводится дефлектометрическое измерение оптического сигнала, исходящего от первой и второй поверхности (10, 20).
Предпочтительно система согласно варианту осуществления изобретения содержит средства измерения ММ1, ММ2 системы оптических измерений, которая предназначена для проведения измерений поверхностей 10, 20 оптического компонента, отображаемых в системе отсчета, определенной для указанной системы.
Предпочтительно по меньшей мере одним из указанных измерительных средств ММ1, ММ2 проводится зональное измерение.
Предпочтительно указанными первым и вторым измерительными средствами ММ1, ММ2 проводится зональное измерение.
Одним из применений этого измерения геометрической структуры для глазной линзы может быть сравнительный анализ линзы после механической обработки со стандартной частью, например, чтобы изучить соответствие изготовленной части.
Соответственно, является необходимым определить абсолютную исходную точку, общую для измеренной глазной линзы и для стандартной части. Соответственно, измеренная глазная линза и стандартная часть относятся к исходной точке, например в той части, в которой осуществляется измерение. Положение измеренной глазной линзы и стандартной части в исходной точке для измерений затем определяется либо путем связывания механической системы отсчета на линзе и такой части, как, например, плоская часть, либо непрерывным нанесением отметок на линзу и часть, подобных микрокругам.
Выше ссылка на «вариант осуществления» означает, что в по меньшей мере одно осуществление изобретения можно включить конкретный признак, такой как, например, структура, или признак, описанный в связи с вариантом осуществления. Наличие выражения «в варианте осуществления» в разных местах в изложенном выше подробном описании не обязательно всегда относится к одному и тому же варианту осуществления. Подобным образом отдельные или альтернативные варианты осуществления и другие варианты осуществления не обязательно являются взаимоисключающими.
Реферат
Изобретение относится к способам измерения геометрической и оптической структуры оптического компонента. Способ включает этапы (S1) измерения первого сигнала (MS1), возникающего из первого преобразования указанной первой поверхностью (10) первого сигнала (PS1) от датчика; (S2) измерения второго сигнала (MS2), возникающего из второго преобразования по меньшей мере указанной второй поверхностью (20) второго сигнала (PS2) от датчика; (S3) определения третьего преобразования, обеспечивающего возможность преобразования от первого набора координат (R1), связанных с измерением первого сигнала (MS1), ко второму набору координат (R2), связанных с измерением второго сигнала (MS2); (S10) оценки указанной первой поверхности (10), осуществляемой на основании первого сигнала (MS1), указанного первого моделирования и первого показателя (VI) качества, определяющего расхождение между первой оценкой (ES1) и первым сигналом (MS1); и (S20) оценки указанной второй поверхности (20), осуществляемой на основании второго сигнала (MS2), указанного второго моделирования, указанного третьего преобразования и второго показателя (V2) качества, определяющего расхождение между оценкой (ES2) и вторым сигналом (MS2). Технический результат - упрощение и ускорение измерений. 2 н. и 16 з.п. ф-лы, 5 ил.
Комментарии