Буровая лебедка для маневрирования буровыми устройствами - RU2509203C2
Код документа: RU2509203C2
Чертежи




Описание
Настоящее изобретение относится к электрической буровой лебедке и, в частности, к буровой лебедке для маневрирования буровыми устройствами.
Известно, буровая лебедка обычно используется для работы с тяжелыми устройствами, которые должны быть опущены или подняты через шахтный ствол или туннели в земле.
В частности, при проходке нефтяных скважин буровая лебедка используется также для маневрирования и подъема буровых штанг, которые затем должны быть опущены в буровую скважину.
Буровые лебедки являются критическими компонентами буровых установок. потому что в отсутствие одной или нескольких надежных и высокопроизводительных буровых лебедок буровая установка не может работать ни эффективно, ни безопасно.
Благодаря тому что буровая лебедка является необходимым компонентом большей части обычных буровых установок, в следующем параграфе приводится краткое описание наиболее общих признаков и функций, связанных с буровой установкой.
Буровая установка содержит следующие компоненты:
- буровую вышку;
- неподвижный блок, закрепленный в верхней части вышеупомянутой вышки;
- подвижный блок, вертикально перемещающийся внутри буровой вышки и подвешенный под неподвижным блоком посредством множества канатов, проходящих через множество шкивов;
- одну или несколько буровых лебедок, имеющих барабан для выпуска и намотки каната, посредством которого подвижный блок поднимается и опускается;
- верхний привод, соединенный с подвижным блоком и вертикально скользящий по множеству направляющих, закрепленных на буровой вышке, и приводимый во вращение буровой батареей;
- средство для подъема и опоры буровой батареи, в свою очередь, состоящей из множества буровых штанг и долота, размещенного в основании скважины;
- средство для циркуляции бурового раствора, которое удаляет со дна скважины обломки породы при вращении долота.
Более подробно, буровая лебедка должна выполнить следующие операции:
- постепенный выпуск каната, на котором установлена буровая батарея с тем, чтобы гарантировать постоянную величину давления долота на дно скважины с увеличением глубины; таким образом, буровая лебедка одновременно должна обеспечивать постоянное натяжение каната; это натяжение используется для поддержания верхнего привода и части веса батареи;
- быстрый подъем верхнего привода, когда необходимо добавить штанги к буровой батарее;
- сравнительно медленный подъем буровой батареи для замены долота и после замены быстрый спуск до уровня продолжения бурения.
Следовательно, эффективная буровая лебедка для установок для бурения нефтеносных скважин должна обладать следующими особенностями: точно регулируемая переменная скорость вращения барабана в режиме реального времени; легкое управление скоростью вращения барабана; управление крутящим моментом на барабане для натяжения каната, который может изменяться в режиме реального времени при эффективном и точном регулировании.
К этим особенностям нужно добавить тот факт, что эти буровые лебедки обычно снабжены тормозными устройствами, используемыми в процессе обслуживания; эти устройства должны быть надежными и прочными с тем, чтобы управлять, например, спуском отдельных блоков подвозимого оборудования. Кроме того, буровые лебедки для буровых установок также должны быть снабжены тормозными устройствами, чтобы статически нести максимальную номинальную нагрузку, если основной тормоз выходит из строя, и не в последнюю очередь для того, чтобы обеспечить меньший объем обслуживания вместе с возможным уменьшением размера и веса.
Наконец, с учетом специфики области, в которой они работают, буровые лебедки для буровых установок должны иметь соответствующие характеристики, связанные с работой на взрывоопасных участках.
На фигуре 1 показана известная промышленная буровая лебедка 1 для использования в буровых установках, которая имеет источник питания 2 (в большинстве случаев электрический). Лебедка расположена рядом с барабаном 3 и соединена с коробкой скоростей 4 через карданный вал 5, соединительную муфту, коробку передач и муфту сцепления с тем, чтобы изменять скорость вращения барабана 3.
Эти способы привода буровой лебедки 1 не очень удобны и фактически имеют определенные недостатки; прежде всего, источник питания 2 занимает много места, создает сильный шум и представляет риск для окружающих людей. Кроме того, коробка скоростей 4, которая представляет собой редуктор для изменения скорости вращения, подлежит дорогостоящему и частому обслуживанию и, конечно, вносит риск поломки буровых компонентов лебедки 1.
Наконец, использование многочисленных механических деталей ограничивает эффективность механического исполнения буровой лебедки 1. Цепи передачи подвергаются пикам натяжения во время работы, что может вызвать обрыв цепи, с пагубными последствиями, которых абсолютно необходимо избежать в области нефтедобычи.
Согласно патентному документу US 6793203 на имя Wirth Maschinenbau, также известна буровая лебедка, содержащая два электродвигателя постоянного тока, соединенных с коробкой передач для изменения скорости, при этом выходной вал имеет шестерню, в свою очередь, соединенную зубчатым колесом, составляющим одно целое с барабаном. На этих двигателях на одной из двух сторон барабанов установлены тормозные диски и индукционный тормоз.
Буровая лебедка также снабжена устройством подачи, состоящим из электродвигателя малой мощности, связанного с редуктором с высоким передаточным числом, который частично действует как тормоз во время размотки каната барабана.
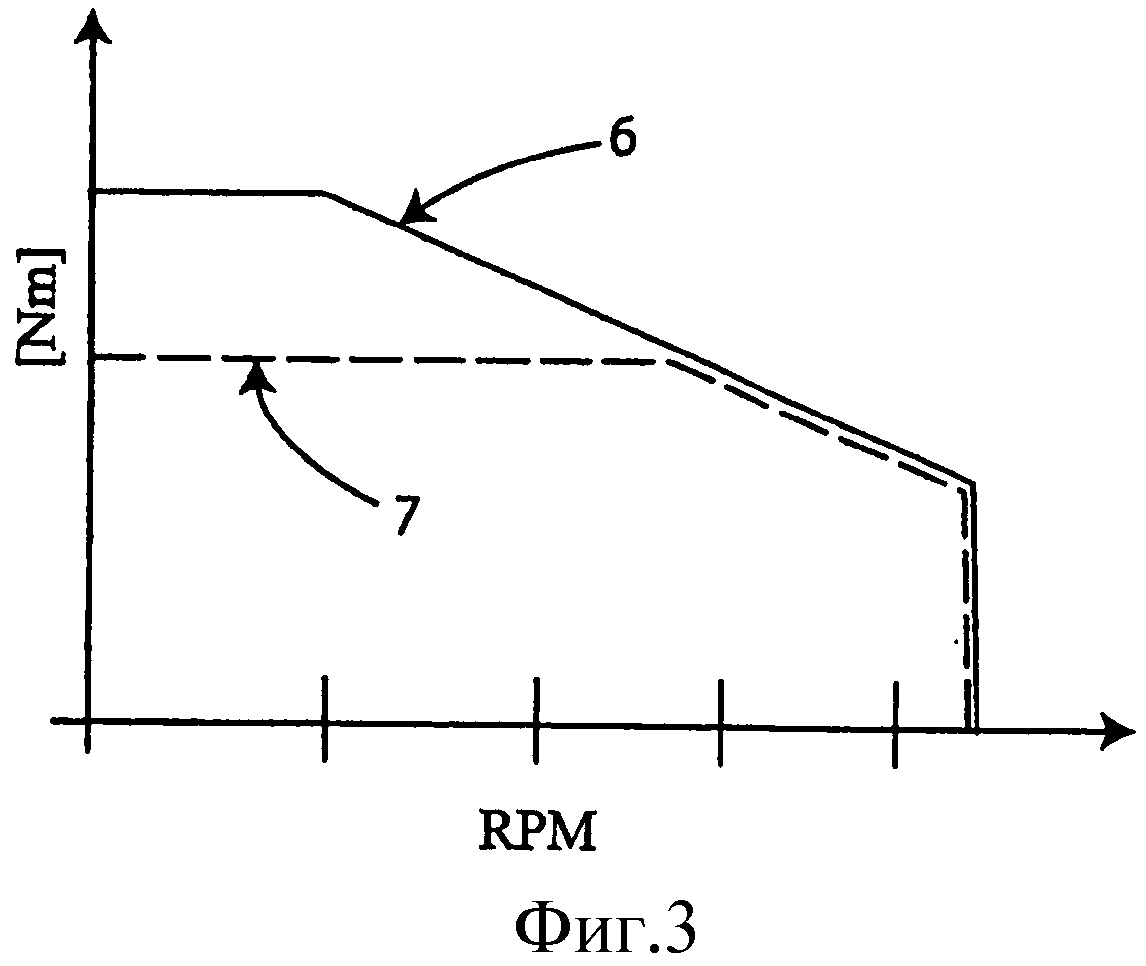
Еще одно назначение буровой лебедки на буровых установках состоит в использовании двигателей переменного тока вместо двигателей постоянного тока; двигатели переменного тока создают крутящий момент выше момента, который возможно получить от двигателей постоянного тока, в частности с очень низким числом оборотов в минуту. На фигуре 3 представлен график крутящего момента электродвигателя переменного тока с увеличенным числом оборотов в минуту в цикле прерывистого движения 6 и в цикле непрерывного движения 7.
Согласно документу США 2008/0116432 также известна электрическая буровая лебедка для намотки и размотки канатов, в которой для устранения недостатков предшествующих устройств используется электродвигатель, смонтированный во вращающемся барабане буровой лебедки. Однако это решение также не лишено недостатков, потому что известно, что эффективность электродвигателя уменьшается с увеличением температуры его обмоток.
Фактически эффективность электродвигателя зависит от сопротивления, которое электрический ток встречает при прохождении через обмотки непосредственно во время работы двигателя; в частности, чем выше электрическое сопротивление, тем больше будут потери, вызванные эффектом Джоуля, и, следовательно, общий КПД уменьшается.
График на фигуре 2 показывает пример того, как электрическое сопротивление увеличивается с увеличением температуры обмоток электродвигателя. При увеличении их температуры до 100°С омические потери удваиваются.
Кроме того, крутящий момент двигателя, который зависит от квадратичного закона, по его наружному диаметру обусловлен размером барабана буровой лебедки.
Именно по этой причине установка двигателя внутри барабана связана с множеством проблем с точки зрения охлаждения и полученного крутящего момента и с серьезным риском повреждения двигателя из-за высокой рабочей температуры.
Цель настоящего изобретения состоит в том, чтобы создать буровую лебедку для маневрирования буровыми устройствами, которая лишена описанных выше недостатков.
Согласно настоящему изобретению, буровая лебедка для маневрирования буровыми устройствами реализована, как заявлено в пункте 1 формулы изобретения.
Изобретение будет далее описано более подробно со ссылками на приложенные чертежи, на которых показан неограничивающий пример воплощения, при этом:
фигура 1 - известная буровая лебедка с системой редуктора и цепями передачи;
фигура 2 - график, на котором сравнивается электрическое сопротивление обмоток электродвигателя буровой лебедки в зависимости от их температуры;
фигура 3 - диаграмма крутящего момента по отношению к скорости вращения электродвигателя при бурении;
фигура 4 - вид сбоку буровой лебедки для предпочтительного примера воплощения настоящего изобретения;
фигура 5 - секция электродвигателя, используемого в буровой лебедке фигуры 4;
фигура 6 - вторая секция электродвигателя, используемого в буровой лебедке фигуры 4;
фигура 7 - схема механически-гидравлической системы буровой лебедки фигуры 4;
фигура 8 - монтажная электрическая схема и система управления буровой лебедкой фигуры 4.
Как показано на фигуре 4, буровая лебедка для маневрирования буровыми устройствами в основном определяется позицией 10; она содержит барабан 11 для размещения на нем каната 12, используемого для подъема и спуска бурового устройства (не показано).
Канат 12 должен иметь достаточную прочность, чтобы выдержать вес бурового устройства с коэффициентом безопасности перед его обрывом; этот коэффициент иногда определяется инструкциями, которые могут измениться в зависимости от области применения настоящего изобретения. Именно по этой причине канат 12 предпочтительно, по меньшей мере, частично состоит из стали, как правило, из множества проволочных жил, намотанных на основу, и может иметь внешнюю закрывающую оболочку для предотвращения окисления металла окислителями из окружающей среды.
Барабан 11 в основном имеет цилиндрическую форму и заслонки 11а, соответствующие двум торцам, разработанным, чтобы содержать по разграниченной площади металлический канат 12, жестко связанный с главным валом 13 вращающегося типа, который поддерживается на своих первом и втором концах первым множеством опор 14, соответственно расположенным на сторонах 15 опорной рамы 16.
Более конкретно, главный вал 13 и первое множество опор 14 могут быть реализованы с любыми материалами, чтобы выдержать общий вес барабана 11, каната 12 и также крутящий момент, обеспечиваемый электродвигателями 19, и динамические нагрузки торможения каната 12 без механического повреждения. Именно по этой причине для их реализации желательно использовать высокопрочные стальные сплавы.
Буровая лебедка 10 также содержит два электродвигателя 19, которые могут соответственно вращаться в первом режиме по часовой стрелке и во втором режиме против часовой стрелки и смонтированы таким образом, что они позволяют главному валу 13 и, следовательно, барабану 11 вращаться вместе с ними без применения коробок скоростей или других средств уменьшения скорости, обеспечивая, таким образом, облегченную конструкцию и бесшумную работу.
Более конкретно, электродвигатели 19, которые содержат ротор 21 и статор 22, закреплены шпонками на главном валу 13 с внешней стороны 15 на соответствующей канавке 20 с тем, чтобы ротор 2 вращался совместно с главным валом 13 без применения какого-либо средства уменьшения или изменения скорости, например редуктора или тому подобного устройства. Такое размещение обеспечивает легкую установку электродвигателей 19 и их быструю замену, если рабочие требования изменяются во время полного эксплуатационного цикла буровой лебедки 10 (например, повышения крутящего момента с помощью более мощных электродвигателей), не воздействуя на остальную часть конструкции буровой лебедки 10 и, в частности, не изменяя конструкцию барабана 11.
Статор 22, который установлен снаружи ротора 21 и "охватывает" ротор, действуя как укрытие, связан с ротором 21 через второе множество опор 23, но закреплен на опорной раме 16 через кронштейны 24, которые жестко связаны с ним, предпочтительно посредством винтов или болтов. Фактически, использование винтов и болтов обеспечивает демонтаж и удаление или замену электродвигателей 19 в случае их повреждения и, кроме того, замену компонентов барабана 11.
Что касается электродвигателей 19, то они имеют постоянные магниты и не имеют щеток и известны как бесщеточные двигатели постоянного тока или синхронные двигатели или двигатели с постоянными магнитами, и также описываются термином высокомоментные электродвигатели.
Как показано на фигуре 5, электродвигатели 19 этого типа характеризуются наличием постоянных магнитов 30, радиально размещенных на роторе 21 так, что в результате они в основном выровнены в одном направлении, тогда как статор 22 имеет полоски 31, обращенные к ротору 21 и помещенные во внутреннюю часть статора 22.
Внешняя часть статора 22 имеет множество кольцевых каналов 32, обеспечивающих охлаждение электродвигателя 19, и питающие кабели 33. Более конкретно, кольцевые каналы 32 являются водонепроницаемыми с множеством элементов 36 для предотвращения возможности утечки охлаждающей жидкости из этих каналов за пределы двигателя 19; кроме того, кольцевые каналы 32 сообщаются с трубопроводной арматурой 34, показанной на фигуре 4 и на фигуре 6, которая установлена на статоре 22 и выступает за габариты электродвигателя 19. Эта арматура связана с первым множеством труб 35 для циркуляции охлаждающей жидкости в системе охлаждения обоих электродвигателей 19.
Характеристики электродвигателей 19, используемых для маневрирования буровой лебедкой 10 согласно настоящему изобретению, также выбраны по их физическим размерам; фактически эти электродвигатели 19 обладают относительно высоким коэффициентом длина/диаметр и относительно небольшой радиальной толщиной. Фактически, их наружный диаметр Di почти равен наружному диаметру Do, и для соединения ротора 21 с относительно короткими валами, например с главным валом 13, используются фланцы 21а.
Между ротором 21 и статором 22 предусмотрена воздушная рубашка, которая гарантирует более легкое выравнивание компонентов двигателя и лучшее охлаждение.
Электродвигатель 19, предусмотренный по данной технологии, обеспечивает очень короткую постоянную времени с последующей очень быстрой динамической реакцией, широкую полосу прохождения, высокую эффективность благодаря использованию постоянных магнитов и высокую скорость, связанную с возможностью регулирования магнитного потока, который создан между ротором 21 и статором 22; в конечном счете, электродвигатели 19 описанного типа дают возможность развить максимальный крутящий момент, почти совпадающий с минимальной возможной скоростью вращения бурового долота.
- Кроме того, одной из характеристик постоянных магнитов и бесщеточных электродвигателей 19, таких как двигатели, используемые в данном изобретении, является уменьшенное число оборотов в минуту по сравнению с другими типами электродвигателей (обычно они вращаются со скоростью значительно ниже 1000 об/мин, взятой как максимальная вращательная скорость бурения). Именно по этой причине они могут работать без использования редуктора для барабана 11. Так же как любой дрогой электродвигатель, электродвигатели 19 могут действовать как генераторы и способствовать торможению барабана 11 во время размотки каната 12 в случае чрезвычайной ситуации. В этом случае электродвигатели 19 передают электроэнергию через свои питающие кабели 33, электрически связанные с одним или несколькими резисторами.
Буровая лебедка 10 также содержит средство для торможения барабана 11, чтобы замедлить вращение вала во взаимодействии с тормозящим усилием электродвигателей 19 автономно, например, после повреждения самих электродвигателей 19.
Более подробно, прежде всего, буровая лебедка 10 содержит несколько тормозных дисков 40, например, закрепленных множеством болтов 41 на барабане 11 с тем, чтобы вращаться вместе с ним. Эти тормозные диски 40 предназначены замедлить вращение барабана 11, когда крутящий момент сопротивления, создаваемый электродвигателями 19, не достаточен для поддержания желательной вращательной скорости бурения барабана 11. В этом случае очевидно, что электродвигатели 19 не получают электрического тока и работают в основном как электрические генераторы.
Каждый тормозной диск 40 соединен с соответствующей тормозной колодкой 42, которая предпочтительно прикреплена к раме 16.
Тормозные колодки 42 удобно снабдить гидравлическим приводом, и они могут быть неподвижного, всплывающего или полувсплывающего типа.
Тормозные диски 40 имеют активный тип охлаждения и самовентиляции. Фактически они охлаждаются не только благодаря вращению и циркуляции воздуха, но также и жидкостью (например, но не ограничиваясь этим, водой, гликолем или маслом), которая поступает через канал 43 во внутренней части главного вала 13, выполненный в направлении оси главного вала 13 и имеющий входной и выходной каналы, которые связаны с:
- множеством выходных отверстий 44, которые предназначены для ввода охлаждающей жидкости в канавки тормозных дисков 40; и
- второе множество фитингов 45, соединенных со вторым множеством труб 46, которые связаны с циркуляционным насосом (на фигуре 4 не показан).
Во-вторых, буровая лебедка 10 имеет вспомогательные тормоза безопасности (не показаны), которые предназначены для блокировки вращения барабана 11 буровой лебедки 10 в случае выхода из строя. Эти тормозные системы имеют важное значение для буровой лебедки, сконструированной для использования в буровых установках, потому что в случае тяжелых грузов, подвешенных на канате 12, и в случае внезапного прекращения подачи тока к электродвигателям 19 и/или повреждения основных тормозов канат 12 может разматываться на слишком высокой скорости, несмотря на тормозящее действие магнитов (динамический эффект) электродвигателей с последующей катастрофической поломкой верхнего привода и других компонентов буровой системы. Вспомогательные тормоза безопасности срабатывают в основном мгновенно, блокируя вращение барабана 11 при обнаружении выхода системы из строя (например, через датчик электрического тока, размещенный на питающих кабелях 33 буровой лебедки 10).
Даже если двигатели на постоянных магнитах обеспечивают превосходное регулирование крутящего момента при очень малой скорости, чтобы не перегрузить электродвигатели 19 во время бурения, буровая лебедка 10 также снабжена автоматической буровой системой, содержащей следующее оборудование:
- автономную систему управления для размотки каната 12 во время бурения;
- третий обычный электродвигатель переменного тока 19' малой мощности (обычно порядка 30 кВт);
- автоматически действующую зубчатую муфту, которая передает вращение от главного вала 13 третьего электродвигателя 19' барабану 11.
Автоматическая буровая система также обеспечивает работу буровой лебедки 10 в аварийных условиях в случае выхода из строя электродвигателей 19 и может функционировать в трех различных режимах:
- первый режим "постоянной нагрузки", в котором автоматическая буровая система определяет давление бурового долота на дно буровой скважины и регулирует это давление по величине, которая будет поддерживаться постоянной;
- второй режим "постоянной скорости", в котором барабан 11 имеет постоянную вращательную скорость бурения и, следовательно, буровая батарея имеет скорость спуска, которая является постоянной и независимой от давления долота на дно буровой скважины;
- третий режим "постоянного давления жидкости", в котором вращательная скорость бурения барабана 11 и также скорость спуска бурового батареи регулируются таким образом, что давление жидкости, используемое для вращения бурового долота, через так называемый забойный двигатель (не показан), сохраняется постоянным.
Буровая лебедка 10 также снабжена системой вентиляции 50 электродвигателей 19, предназначенной для работы на участках, связанных с риском взрыва.
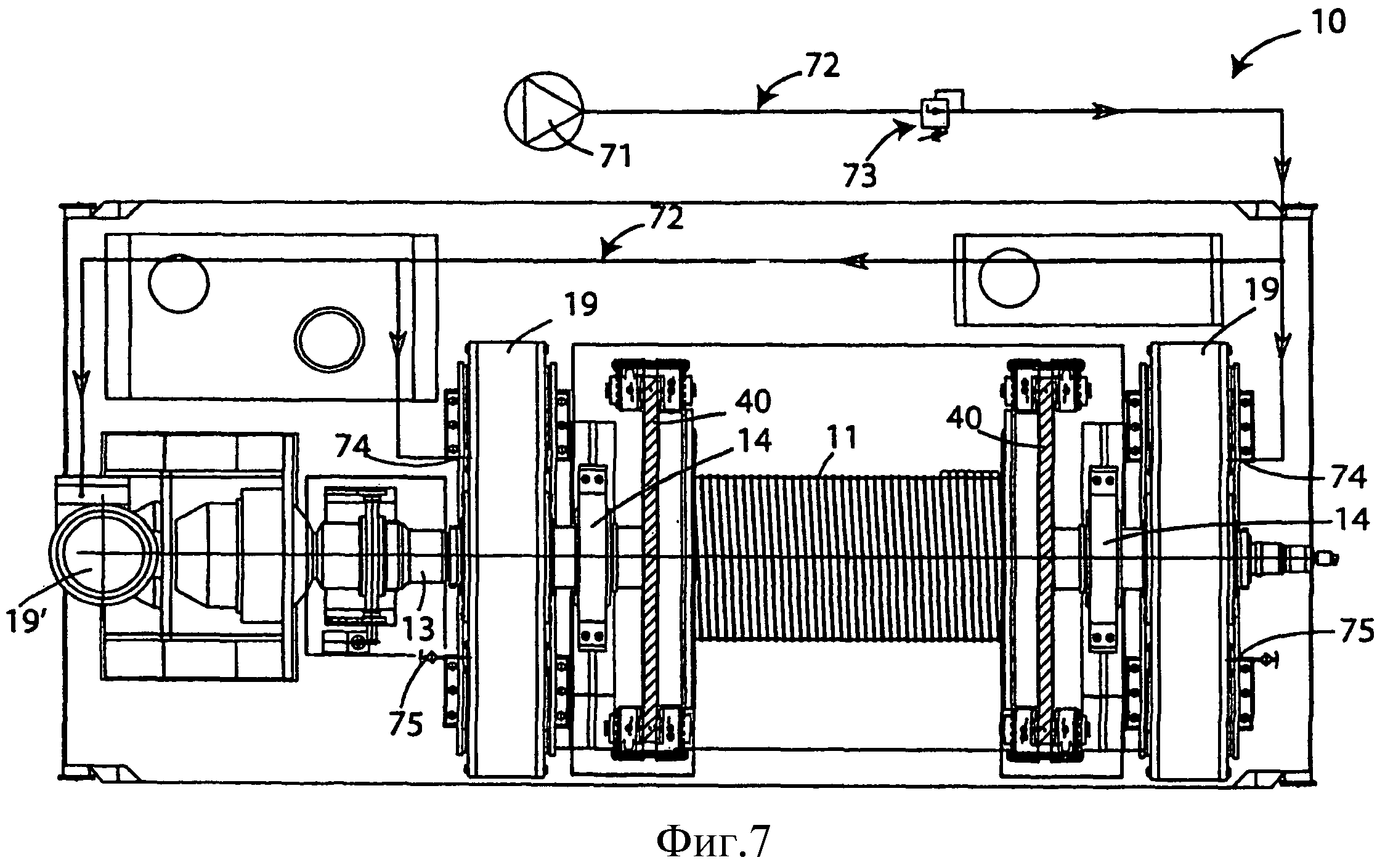
Более конкретно, как показано на фигуре 4 (относительно механического расположения) и фигуре 7 (относительно схемно-механического гибридного представления), система вентиляции 50 также позволяет герметизацию пространства в статоре 22 электродвигателей 19 и содержит:
- удаленный вентилятор 70, соединенный с трубопроводом 72, снабженным редукционным клапаном 73 с регулируемым давлением;
- входную трубопроводную арматуру 74 и выходные фильтры 75, используемые соответственно для приема воздуха под давлением из трубопроводов 72 и отвода воздуха от электродвигателей 19 и от третьего двигателя 19'.
Более подробно, во время бурения удаленный вентилятор 70 засасывает воздух из удаленной области относительно буровой лебедки 10, которая обычно расположена очень близко к центру скважины, и нагнетает этот воздух на буровую платформу, на которой установлена буровая лебедка 10.
С другой стороны, редукционный клапан 73 установлен около электродвигателей 19 и предпочтительно снижает давление воздуха, подаваемого в основания электродвигателей 19 предпочтительно под давлением на 1 бар выше, чем атмосферное давление. Воздух, подаваемый в электродвигатели 19, выходит через выходные фильтры 75 и затем рассеивается в пространстве, окружающем буровую скважину.
Более подробно, во время бурения давление, существующее в основаниях, относительно выше атмосферного, предотвращает контакт между атмосферой областей в непосредственной близости от скважины с внутренней частью электродвигателей 19. Фактически, эта атмосфера может быть охарактеризована присутствием легковоспламеняющихся или, что еще хуже, взрывоопасных газовых смесей.
Фактически, даже при том, что бесщеточные двигатели представляют меньше риска возникновения электрических искр во время работы по сравнению со щеточными электродвигателями, тем не менее, этот риск нельзя исключать, и именно по этой причине конструкция электродвигателей 19 изолирована от окружающей среды. Наличие давления выше атмосферного в основаниях электродвигателей 19 исключает риск проникновения горючего газа в двигатель.
С точки зрения управления электродвигатели 19 буровой лебедки 10 установлены таким образом, что они обеспечивают непрерывное и точное регулирование вращательной скорости бурения и крутящего момента.
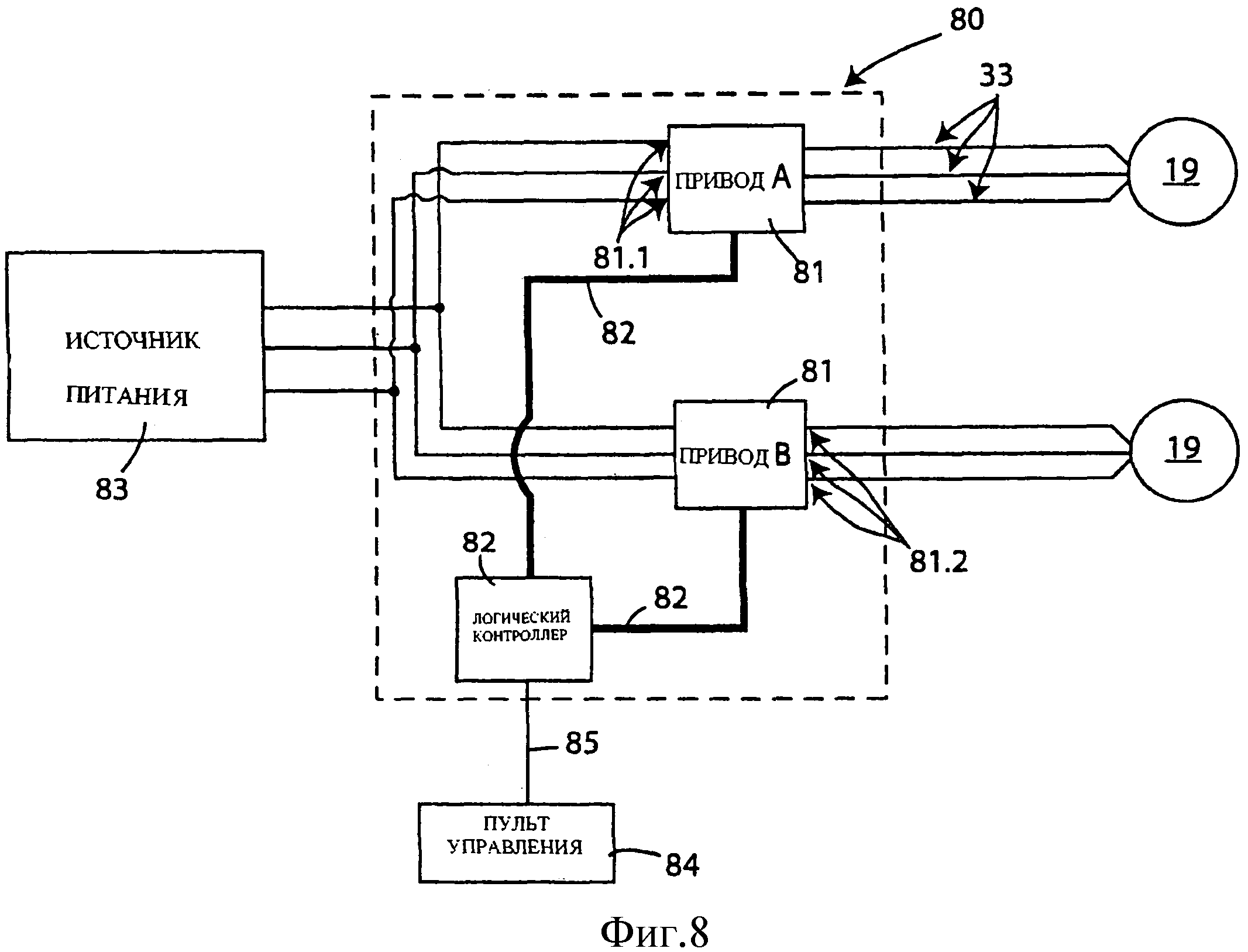
Как показано на фигуре 8, управление электродвигателями 19 осуществляется через сеть управления 80, которая содержит, по меньшей мере, один контроллер (или привод) 81 для каждого двигателя 19, и программируемый логический контроллер 81 электрически соединен через один или несколько кабелей для обмена данными 82 с каждым из указанных контроллеров 81.
Более конкретно, каждый контроллер 81 включает:
- один или несколько входов 81.1, непосредственно соединенных с внешним источником питания 83; и
- один или несколько выходов 81.2, непосредственно соединенных с электродвигателями 19. Указанный контроллер служит для регулирования вращательной скорости бурения соответствующего электродвигателя 19 на основе электрических сигналов, полученных от программируемого логического контроллера 81, а также выполняет вторичные функции, такие как предотвращение перегрузки, и действует как ограничитель тока или также как преобразователь постоянного тока в переменный.
Более конкретно, через программируемый логический контроллер 81 скорость и крутящий момент электродвигателей 19 непрерывно регулируются с помощью двух независимых датчиков. На основе значений натяжения и крутящего момента, обеспеченного контроллерами 81, программируемый логический контроллер 81 посылает сигнал в контроллеры 81, которые предназначены для увеличения или уменьшения электрического тока, подаваемого в электродвигатели 19.
Электродвигатели 19 управляются через широтно-импульсную модуляцию.
Широтно-импульсная модуляция означает питание электродвигателя напряжением прямоугольного сигнала с фиксированной частотой (от нескольких кГц до 20 кГц) и переменным коэффициентом заполнения.
Фактически, коэффициент заполнения d определяется как коэффициент между временным интервалом т, в котором прямоугольный импульс на первом высоком уровне и период Т самого прямоугольного импульса (Т - инверсия частоты, и Т-1 представляет собой временной интервал, в котором прямоугольный импульс находится на втором низком уровне). По мере изменения коэффициента заполнения средняя величина напряжения, приложенного к электродвигателю, также изменяется (эта величина легко выводится посредством интеграции на одном или нескольких периодах формы волны).
В основном двигатель "чувствует" среднюю величину напряжения, следовательно, скорость и крутящий момент, обеспечиваемые двигателем, непосредственно зависят от средней величины напряжения.
С другой стороны, чтобы полностью изменить направление вращения двигателя с постоянными магнитами, необходимо полностью изменить полярность напряжения якоря.
Программируемый логический контроллер 81 также снабжен системами управления и диагностики, которые служат для проверки правильности функционирования буровой лебедки 10, электродвигателей 19 и контроллеров 81. Если это не так, программируемый логический контроллер 81 формирует предупредительный сигнал (например, активирует визуальный или звуковой сигнал) и, кроме того, он может управлять переключением питающих кабелей 33 от электродвигателей 19, когда имеют место неполадки в системе обслуживания торможения, чтобы использовать электродвигатели 19 в качестве аварийного тормоза.
Наконец, программируемый логический контроллер 81 соединен с пультом управления 84 через кабель управления 85; пульт управления в основном представляет собой пользовательский интерфейс, с помощью которого один или несколько операторов могут регулировать, например, направление вращения электродвигателей 19, их вращательную скорость бурения, их крутящий момент и торможение.
Преимущества настоящего изобретения очевидны из предыдущего описания. Более конкретно, буровая лебедка согласно настоящему изобретению обеспечивает равномерное распределение нагрузки на кручение на главном валу 13 по обеим сторонам барабана 11, благодаря наличию двух электродвигателей 19, установленных по одному на каждой стороне. Равное распределение нагрузки также обеспечивается наличием нескольких тормозных систем, состоящих из дисков 40 и колодок 42 по одной паре для каждой стороны барабана 11 буровой лебедки 10.
Эти электродвигатели 19 просты в изготовлении и благодаря их конструктивной типологии они обеспечивают высокий крутящий момент при низком числе оборотов в минуту и в то же время обеспечивают очень точное регулирование вращательной скорости бурения.
По этой причине можно упростить такие конструкции, как коробки переключения передач, механические узлы редуктора, зубчатые колеса или цепи, используемые для изменения коэффициента между вращательной скоростью бурения барабана 11 и электродвигателем 19, не являются необходимыми; получая, таким образом, преимущества с точки зрения снижения шума механизмов, снижения себестоимости добычи и числа частей в основном из-за опасности выхода их из строя и износа и уменьшения препятствий в работе самой буровой лебедки.
Другое преимущество состоит в том, что электродвигатели 19 имеют ограниченную продольную длину, и это помогает уменьшить размеры буровой лебедки 10, так же как и уменьшить ее вес.
Описанная выше буровая лебедка 10 также может работать в условиях высокого риска пожарной опасности и взрывоопасности, благодаря наличию системы герметизации электродвигателей 19 и третьего электродвигателя 19', и предназначена для работы в районах с высокой температурой окружающего воздуха, поскольку электродвигатели 19 снабжены системой активного охлаждения.
В описанном устройстве могут быть выполнены некоторые модификации. Например, связь между контроллерами 81 и программируемым логическим контроллером 81 может быть осуществлена по беспроводной технологии; тормозные диски 40 могут быть установлены парами на каждой стороне барабана 11, и обычные двигатели, используемые для буровых операций, могут быть установлены попарно, по одному для каждой стороны буровой лебедки 10.
Канат 12 может быть сформирован из нескольких элементов, или быть двойным или тройным, или может быть реализован в виде синтетического материала или компаунда из синтетического/природного материала вместо стали.
Реферат
Буровая лебедка (10) для маневрирования буровыми устройствами, содержащая: средство (11) для наматывания, по меньшей мере, одного каната (12), которое размещено по центру вала (13), имеющего один первый конец и один второй конец и вращающийся в одном первом направлении и в одном втором направлении, противоположном первому направлению; средство наматывания каната (11), имеющее, по меньшей мере частично, в основном цилиндрическую форму; одну или несколько опор (14), которые служат для поддержки указанного вала (13) в процессе вращения; множество двигателей (19), которые обеспечивают вращение вала (13), и средства наматывания каната (11) в первом направлении и во втором направлении, основную раму (16), к которой крепятся опоры (14) и множество двигателей (19); множество двигателей (19), установленных с обеих сторон средства наматывания каната (11) и соединенных с ними без элементов снижения скорости, с прямой передачей крутящего момента на вал (13). 14 з.п. ф-лы, 8 ил.
Формула
- средство (11) для наматывания по меньшей мере одного каната (12), размещенное в центре вала (13), который имеет один первый конец и один второй конец и вращается в одном первом направлении и в одном втором направлении, противоположном первому направлению, указанное средство (11) для наматывания каната имеет, по меньшей мере частично, цилиндрическую форму;
- одну или несколько опор (14), которые служат для поддержки указанного вала (13) в процессе вращения;
- множество двигателей (19), которые служат для обеспечения вращения в указанном первом направлении и в указанном втором направлении указанного вала (13) и указанного средства наматывания каната (11);
- основная рама (16), к которой крепятся указанные опоры (14) и указанное множество двигателей (19);
указанная буровая лебедка, отличается тем, что указанное множество двигателей (19), установлено с обеих сторон указанного средства наматывания каната (11) и соединено с указанным средством наматывания каната (11) без элементов снижения скорости прямой передачей момента на вал (13).
- первый режим постоянной нагрузки, в котором определяется сила, с которой буровое долото, соединенное с указанным канатом (12), давит на дно буровой скважины, и в котором указанная сила устанавливается по величине, которая будет поддерживаться постоянной;
- второй режим постоянной скорости, в котором указанное средство 11 разматывает канат с постоянной скоростью вращения, которая не зависит от давления долота на дно буровой скважины;
- третий режим постоянного давления жидкости, в котором скорость вращения средства наматывания каната 11 регулируется таким образом, что давление жидкости, используемое для вращения бурового долота, поддерживается постоянным.
Комментарии