Устройство и способ для автоматического изготовления ленты с нитями визуализации воздушных потоков на аэродинамических поверхностях - RU2344398C2
Код документа: RU2344398C2
Чертежи







Описание
Настоящее изобретение имеет отношение к созданию устройства и способа для визуализации воздушного потока при помощи нитей на аэродинамических поверхностях, причем полоски клейкой ленты, снабженные нитями, получают (изготавливают) автоматически.
Существуют различные возможности визуализации воздушных потоков на поверхностях модели в аэродинамических трубах. Одним из способов является нанесение нитей на исследуемую поверхность. Поведение нитей позволяет получить быстрое общее представление относительно характеристик воздушного потока в исследуемой области. За счет освещения ультрафиолетовым излучением, белые окрашенные нити или флюоресцирующие синтетические материалы очень хорошо видны, так что эти эксперименты могут быть документированы при помощи видеокамеры. Нити сцепляют с поверхностью модели, например при помощи капель связующего материала или при помощи кусков клейкой ленты, или же их сцепляют с одной стороной клейких лент ранее крепления к модели клейких лент в виде непрерывных полосок. В области высоких частот используют индивидуально прикрепленные нити, так как полоски клейкой ленты не должны нарушать (возмущать) поверхность модели. В аэродинамической трубе - LSWT Bremen of Airbus Deutschland GmbH измерения проводят в области низких частот. Следовательно, полоски клейкой ленты с заданной конфигурацией, снабженные нитями, могут быть использованы.
Приведенные далее документы имеют отношение к области способов визуализации для экспериментов в аэродинамической трубе. Методика осуществления таких способов в этих документах не описана. Однако в приведенных документах подчеркивается важность визуализации потоков при помощи нитей на аэродинамических поверхностях.
J.P.Crowder, Flow simulation techniques 4-th International Symposium on flow visualization Paris, August, 1986.
E.Thiel, Anwendungsbeispiele herkommlicher Sichtbarmachungsmethoden aus dem Stromungsversuch bei Dornier Interner Dornier Bericht (1970-1975 ?).
Agardograph 70 / April 1962.
J.P.Crowder, Fluorescent Mini Tufts for flow visualization. Boeing Commercial Airplanes Co. Feb. 1977.
Royal aircraft establishment Techn. Memo AERO 2038.
D.G.Dobney et al. "Minituft" поверхность flow visualization method. April 1985.
Stromungssichtbarmachung mit Minitufts im Niedergeschwindigkeitskanal der THD Studienarbeit H.Cremer TH Darmstadt Feb. 1993.
Eidg. Flugzeugwerke Emmen Bericht FO 1753 Sichtbannachung der Stromung durch Minitufts fur Windkanale, 1984.
Краткое изложение изобретения
В аэродинамической трубе LSWT Bremen, главным образом, белые нити или штопальный хлопчатобумажный материал (хлопчатобумажные нити) используют для визуализации воздушных на базе нитей потоков. Для отсечки или отрезания одиночной нити нить с катушки наматывают вокруг картонной полоски; следует иметь в виду, что имеющийся в продаже штопальный хлопчатобумажный материал уже намотан на картонку. Затем нити разрезают вместе с картонкой, чтобы получить нити желательной длины (обычно длина нитей составляет около 2 см, однако она может быть и другой). Для этого нити на картонке закрепляют или зажимают при помощи соответствующего устройства таким образом, что нити могут быть аккуратно рассечены.
Множество клейких с одной стороны полосок клейкой ленты, например имеющейся в продаже односторонней клейкой ленты, как можно более тонкой, прикрепляют к деревянной установочной плите (21), клейкой стороной вверх. Линии разметки размещают (проводят) на установочной плите (21) так, чтобы обеспечить нормализованные расстояния между нитями. Установочная плита (21) изготовлена из дерева и имеет длину около 1 метра, что соответствует максимальной длине одной полоски клейкой ленты.
Нити, которые ранее уже были разрезаны на куски желательной длины, приклеивают вручную на подготовленные односторонние полоски клейкой ленты. Нити должны быть приклеены на длине 3-5 мм, чтобы обеспечить надежное закрепление нитей на полосках клейкой ленты.
Расстояние между нитями (8) по желанию может быть изменено, а в других обстоятельствах используют линии разметки на установочной плите (21). Нанесение полосок клейкой ленты, снабженных нитями, отнимает у оператора несколько часов.
Недостаток этого способа заключается в том, что эта работа является очень монотонной и длительной, а с другой стороны, ее приходится выполнять ежедневно, чтобы обеспечить проведение измерений на моделях в аэродинамической трубе.
Более того, в настоящее время отсутствует устройство, которое позволяет автоматически отрезать нити, например, длиной 2 см, и затем помещать их на клейкую поверхность полоски клейкой ленты. Во время приложения давления сцепления кончики пальцев оператора осуществляют движение качения таким образом, что нити надежно прикрепляются к поверхности полоски клейкой ленты. До настоящего времени такая работа является неприятной для оператора команды, работающей на аэродинамической трубе.
Задачей настоящего изобретения является создание устройства для изготовления полосок клейкой ленты, снабженных нитями для визуализации воздушных потоков, которое позволяет заменить известные операции отрезания и нанесения нитей на полоски клейкой ленты.
Эта задача может быть решена за счет точной фиксации нитей на полосках клейкой ленты (24), с возможностью создания небольших отходов, таким образом, что полоски клейкой ленты (24), которые снабжены нитями (8), наносят только на исследуемые поверхности аэродинамической модели.
Эта задача решена при помощи устройства по пп.1 и 15 формулы изобретения. Дополнительные примерные варианты и аспекты предложенных способа и устройства приведены в зависимых пунктах формулы изобретения.
Далее предложенные устройство и способ будет описаны со ссылкой на фиг.1-10.
Краткое описание чертежей
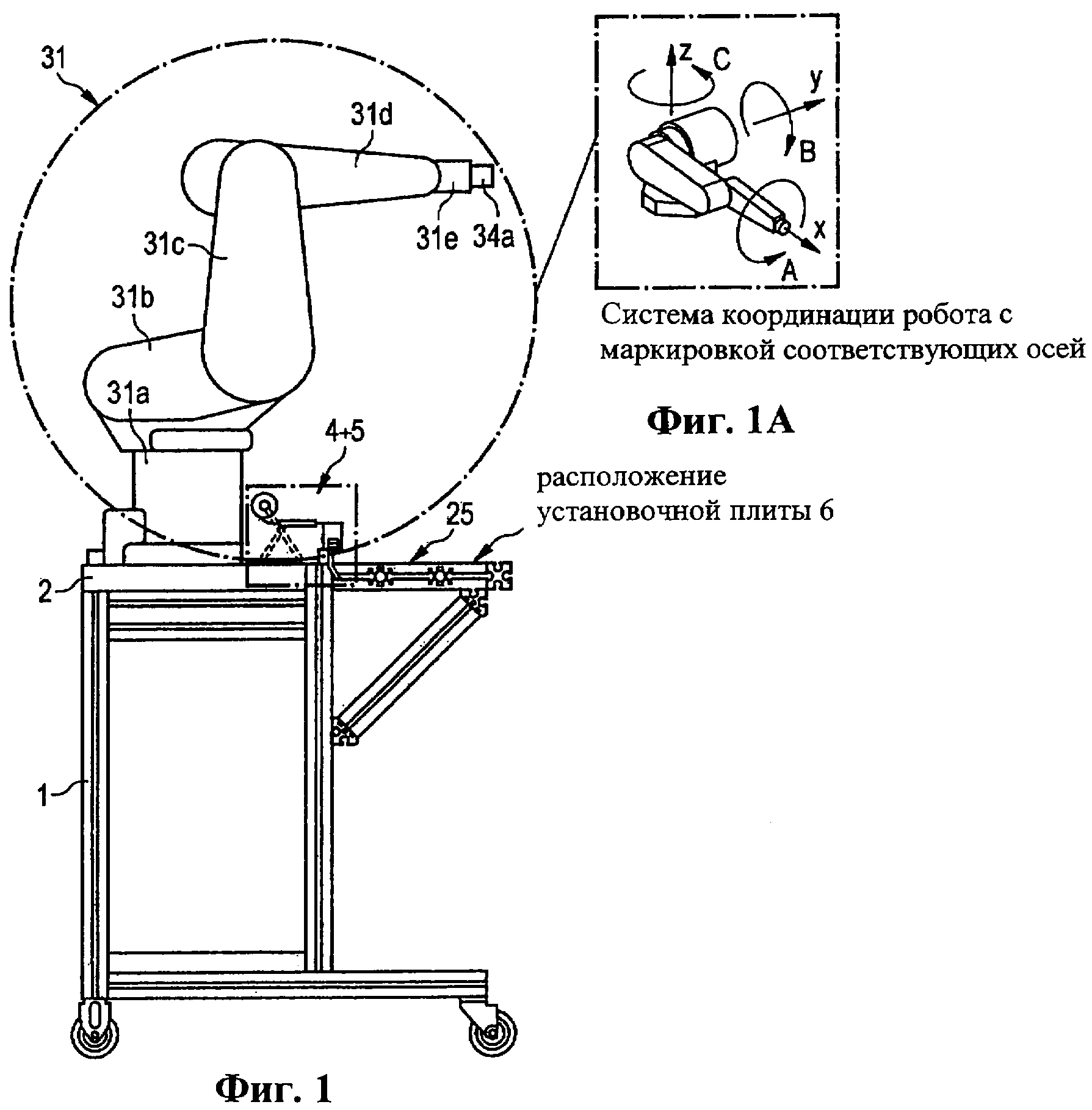
На фиг.1 показан вид сбоку устройства для изготовления полосок клейкой ленты, снабженных нитями для визуализации воздушных потоков.
На фиг.2а показан вид сбоку блока доступа к нити, расположенного рядом с блоком отрезания нити (который показан также опунктиренным на фиг.1).
На фиг.2b показан вид спереди блока выхода нити, расположенного рядом с блоком отрезания нити.
На фиг.3 показан вид сбоку пинцета со скрытой канавкой для надежного захватывания и удержания нити.
На фиг.3а показан вид сбоку левой ветви (рычага, плеча) пинцета, со скрытой канавкой на конце ветви.
На фиг.3b показан вид сбоку правой ветви пинцета, со скрытой канавкой на конце ветви.
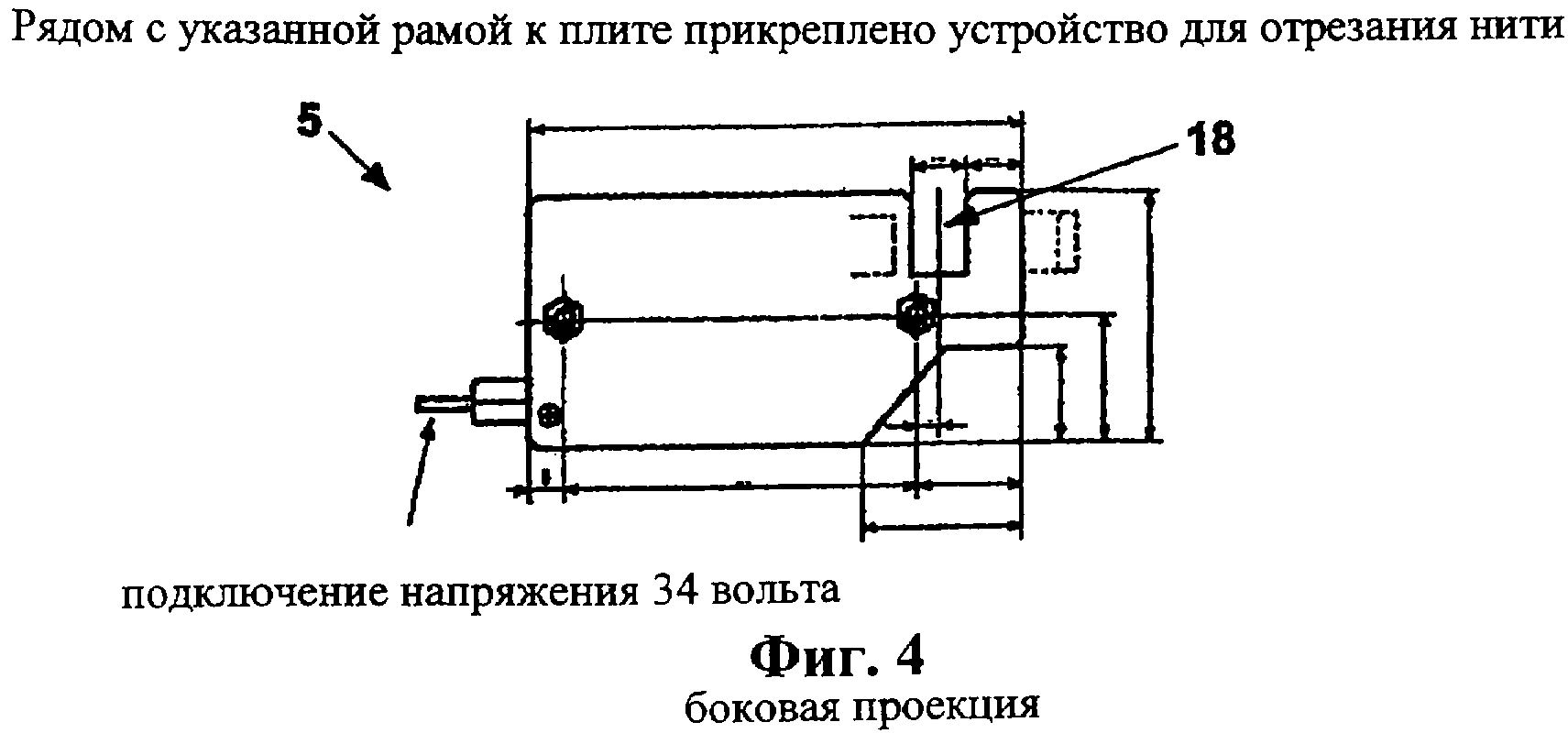
На фиг.4 показан вид сбоку блока отрезания нити.
На фиг.4а показан вид сверху блока отрезания нити.
На фиг.5 показана фотография всего устройства.
На фиг.6 показан пинцет / соединителный узел фланца захвата, с металлическим штырем и средством прижима.
На фиг.7 показана частично модель крыла с нанесенными полосками клейкой ленты.
На фиг.8 показана частично установочная плита (6) из плексигласа, расположенная в рабочей зоне робота (31).
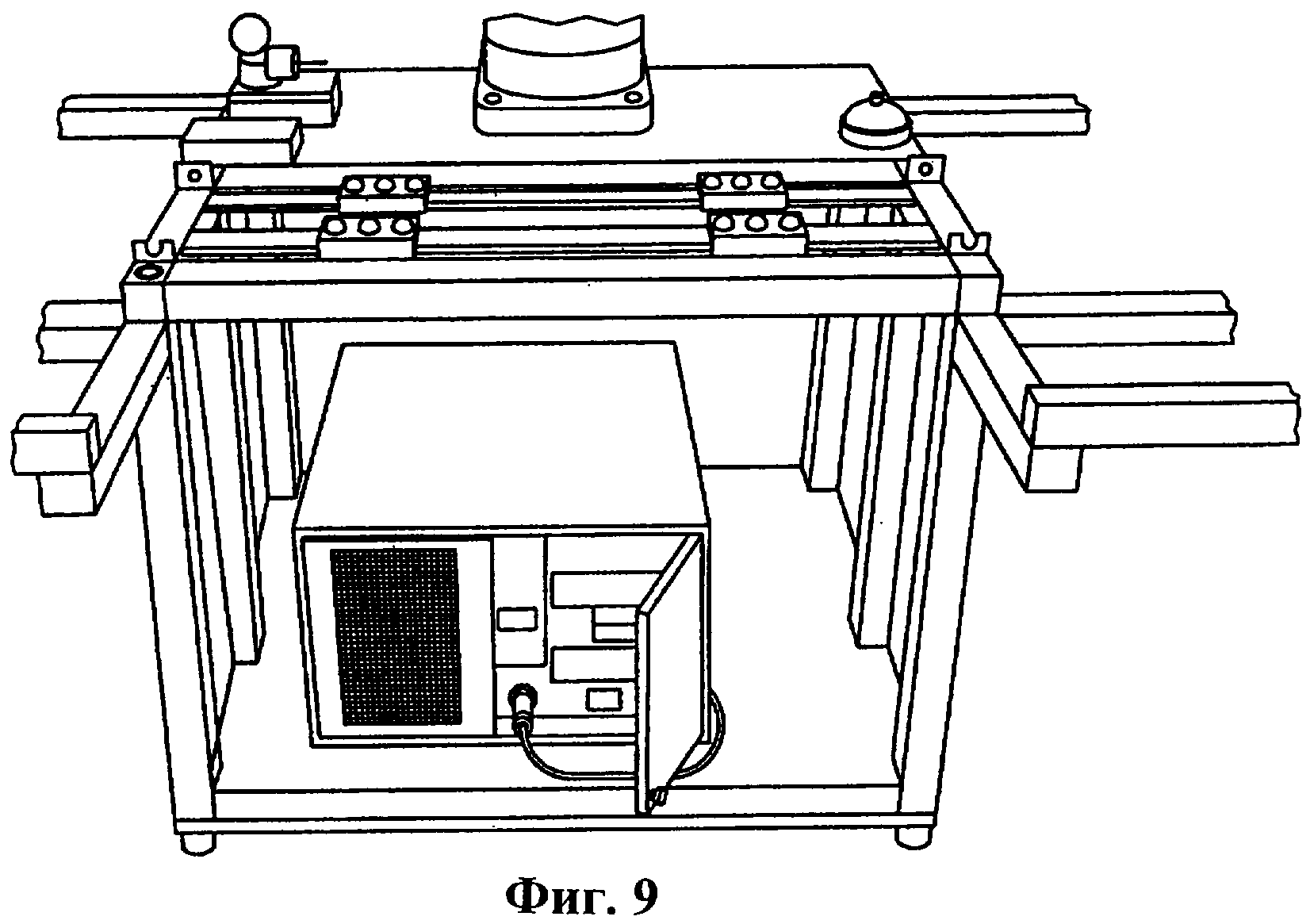
На фиг.9 показана частично несущая рама, с передней рамой для опорной плиты.
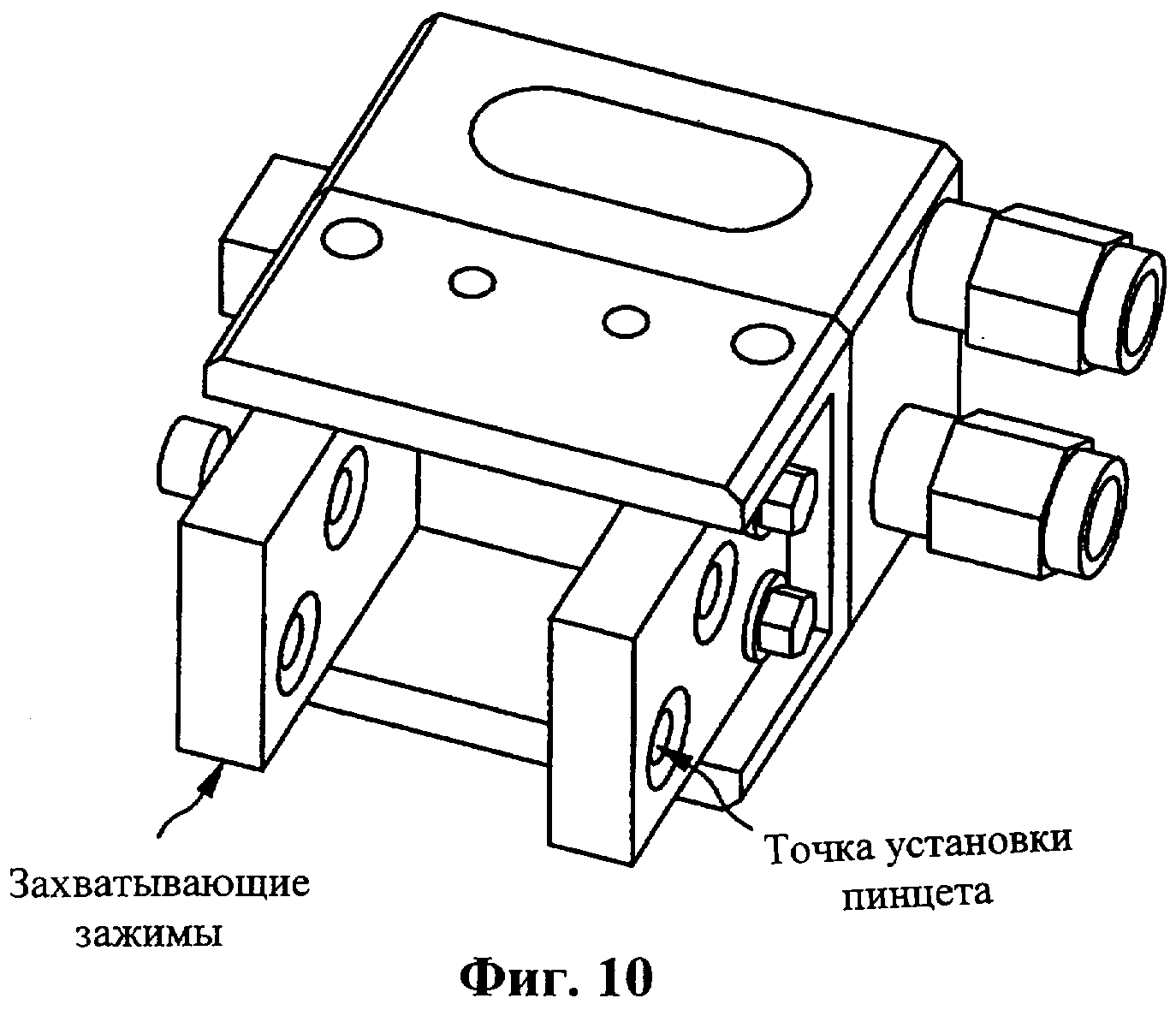
На фиг.10 показан захват (9).
Примеры осуществления изобретения
Описанное далее устройство выполнено с возможностью автоматического приклеивания нитей на полоски клейкой ленты, что поясняется здесь ниже со ссылкой на фиг.1-10.
Должна быть подготовлена вручную только установочная плита (6), которая содержит полоски клейкой ленты, закрепленные в заданных местоположениях (эта работа занимает около 20 минут). Для проведения других работ используют робот небольшого веса, например робот весом 3 кг. Робот прочно закрепляют на раме (1), которая закреплена на земле или стоит на земле. Кроме того, блок (4) выхода нити и блок (5) отрезания нити устанавливают на раме (1), в рабочем диапазоне робота. Установочную плиту (6), которая изготовлена из плексигласа и содержит односторонние полоски клейкой ленты, вводят в рабочий диапазон робота. Установочную плиту (6) вводят в раму (в переднюю часть рамы (1), которая закреплена на земле).
Рама (25) снабжена прутьями, которые покрыты пенопластовым матом толщиной 1 см.
Всегда обеспечивается одно и то же положение установочной плиты (6) по отношению к неподвижному роботу, однако система получает определенную степень гибкости за счет пенопластового мата, который расположен под плитой.
Робот, который неподвижно установлен на задней секции рамы (1), в соответствии с настоящим изобретением снабжен пневматическим захватом (9), который установлен на фланце робота при помощи соединительного узла фланца захвата, причем пинцет (91), например изготовленный из алюминия, установлен на щеках захвата (9) в установочной точке (см. фиг.3).
Блок (4) доступа к нити в соответствии с настоящим изобретением выполнен таким образом, что катушка (12) (бобина для ниток) установлена с возможностью вращения в небольшой рамке, причем конец нити проходит через небольшую трубку и затем выходит из конца трубки (13) для обеспечения захватывания (см. фиг.2).
Блок доступа к нити расположен таким образом, что к нему обеспечен доступ захвата (захватного устройства) робота.
Рядом с блоком (4) доступа к нити находится блок (5) отрезания нити, прикрепленный к раме (1).
Преимущество настоящего изобретения заключается в том, что куски нитей заданной длины не приходится больше отрезать вручную.
Рабочее напряжение блока (5) отрезания нити составляет 24 вольта постоянного тока.
Потребляемый ток блока (5) отрезания нити составляет 200 мА (при 24 вольтах постоянного тока).
Время срабатывания: 20 мс.
Диапазон применения: до 3000 dtex.
На фиг.4 показан вид сбоку блока отрезания нити, а на фиг.4а показан вид сверху блока отрезания нити. Блок (5) отрезания нити прочно прикреплен к задней секции (1), закрепленной на земле, в передней раме (22), с катушкой (12), расположенной таким образом, что конец размотанной нити (11) свешивается наружу из средней трубки (13) рамки и располагается непосредственно перед входом плоскости ножей блока (5) отрезания нити.
Блок (5) отрезания нити представляет собой имеющееся в продаже электрическое устройство отрезания нити, имеющее зажим нити, которое в основном используют в автоматических швейных машинах. Блок (5) отрезания нити отрезает небольшую (короткую) нить (11) за счет приложения напряжения 24 вольта (200 мА).
Нож (16), который смещен за счет усилия пружины, соударяется с расположенной напротив него наковальней, в результате чего происходит отрезание небольшой нити (11), которая расположена в прорези (18), после чего отрезанная нить удерживается при помощи зажима нити. Небольшая нить (11) прочно удерживается до тех пор, пока пружина вновь не будет смещена при помощи приложенного вручную усилия, которое прикладывают к средству (17) возврата в исходное положение.
Последовательную процедуру проводят таким образом, что установочную плиту (6) вводят в раму (25) (в переднюю часть рамы (1)) напротив робота, в его рабочей зоне, причем односторонние полоски клейкой ленты всегда фиксируют в одном и том же местоположении (вдоль линий разметки). Таким образом, всегда получают одно и то же положение (полосок) относительно неподвижного робота, причем система получает определенную гибкость за счет мата из пенопласта, который расположен под плитой.
Робот запрограммирован таким образом, что он захватывает нити из катушки (12), установленной на рамке (22), которые свешиваются из небольшой трубки (13), при помощи захвата (9), с использованием пинцета (91) и затем вытягивает нить (11) на длину 2 см в горизонтальном направлении, через прорезь (18) блока (5) отрезания нити. В то время как пинцет (91) все еще удерживает нить (11), переключается реле при помощи блока управления робота, которое сначала разрешает отрезание нити (11), а затем открывает зажимное приспособление блока (5) отрезания нити. В следующей операции робот устанавливает пинцет (91), который все еще захватывает небольшую нить, над установочной плитой (6) таким образом, что пинцет (91) может быть открыт, и небольшая нить сгибается (сворачивается) в желательное положение полоски (в желательное место на полоске) клейкой ленты.
В положении (без изменения Y доступа и Х доступа), в котором небольшая нить упала, робот поворачивает захват в следующее положение таким образом, что подпружиненное средство (27) прижима, которое установлено на фланце робота (доступ 6), производит вертикальное перемещение в направлении установочной плиты (6) и закрепляет небольшую нить на клейкой поверхности полоски клейкой ленты при помощи подпружиненного средства (27) прижима.
Процедуры выборки небольшой нити (11), отрезания небольшой нити (11), опускания (падения) небольшой нити и прижима небольшой нити повторяют за счет соответствующего программирования робота до тех пор, пока все полоски клейкой ленты, которые закреплены на установочной плите (6), не будут снабжены небольшими нитями на заданном расстоянии.
На фиг.5 показано изображение всего устройства.
Так как установочная плита (6) может быть настолько широкой, что не может быть полностью обеспечен доступ к ней робота, то металлический штырь (23) может быть установлен на соединительном узле фланца захвата, который перемещает установочную плиту (6) в горизонтальном направлении (в направлении отрицательного Х-доступа) в закрепленной на земле раме (1), при помощи движения доступа робота, в такой степени, что робот устанавливается в положении, позволяющем производить падение дополнительных небольших нитей на установочную плиту (6) и закреплять их. Это показано на фиг.6.
На фиг.7 показана частично модель крыла (7) с полосками клейкой ленты (24), с нитями (8), приклеенными к ним.
На фиг.8 показана частично установочная плита (6) из плексигласа, расположенная в рабочей зоне робота (31).
На фиг.9 показана частично несущая рама, с передней рамой для опорной плиты.
На фиг.10 показан захват (захватывающее приспособление) (9).
В соответствии с настоящим изобретением может быть использован любой программируемый робот для проведения эксперимента.
Использование устройства позволяет экономить несколько часов времени в течение каждого дня, так как устройство может работать во время проведения измерений, без использования оператора.
Это может быть первым автоматическим устройством для приклеивания небольших нитей, которое представляет большой интерес для распространенных во всем мире аэродинамических труб, работающих в режиме малых скоростей, для изготовителей аэродинамических труб и для организаторов гонок Формулы 1 (использующих аэродинамическую трубу фирмы Тойота).
Реферат
Изобретения относятся к экспериментальной аэродинамике и могут быть использованы при проведении аэродинамических испытаний для визуализации воздушного потока при помощи нитей на аэродинамических поверхностях. В изобретении предлагаются устройство и способ для визуализации воздушного потока при помощи небольших нитей на аэродинамических поверхностях. Устройством автоматически изготавливаются полоски клейкой ленты, снабженные нитями и крепящиеся затем на исследуемую поверхность объекта. Технический результат заключается в сокращении времени и трудозатрат при размещении нитей на объектах при осуществлении аэродинамических испытаний. 2 и 15 з.п. ф-лы, 10 ил.
Комментарии