Зондирование конструкции из бетона при помощи электромагнитных волн - RU2737415C1
Код документа: RU2737415C1
Чертежи
Описание
Область техники, к которой относится изобретение
Изобретение относится к способу зондирования конструкции из бетона, в соответствии с которым в конструкцию отправляют электромагнитную волну, принимают отраженный сигнал волны из конструкции, и получают внутренние характеристики конструкции из отраженной волны.
Изобретение относится также к устройству для выполнения упомянутого способа.
Уровень техники изобретения
Известен подход к зондированию конструкции из бетона с помощью электромагнитных волн. С этой целью, короткий электромагнитный импульс отправляют в конструкцию и принимают его отраженный сигнал. В таком случае, конструкцию можно определять по амплитуде и задержке пиков в отраженном сигнале.
Данный тип анализа нуждается в сложных аппаратных средствах, которые способны дискретизировать отраженные сигналы с высоким временным разрешением. Аппаратные средства данного типа должны выполнять высокочастотную дискретизацию отраженных сигналов и поэтому имеют высокое энергопотребление. Кроме того, требуется обрабатывать сигналы в широком частотном диапазоне, что делает технологию чувствительной к помехам в присутствии сигналов радиосвязи, например, WiFi–сигналов.
Сущность изобретения
Поэтому общей целью изобретения является создание способа и устройства упомянутого типа с низким энергопотреблением.
Данная цель достигается посредством способа и устройства по независимым пунктам формулы изобретения.
Соответственно, способ зондирования конструкции из бетона содержит следующие этапы:
– Отправляют посредством антенны электромагнитную волну в конструкцию.
– Принимают посредством антенны отраженный сигнал электромагнитной волны из конструкции.
– Определяют внутренние характеристики упомянутой конструкции по отраженному сигналу.
Кроме того, этап отправки электромагнитной волны в конструкцию содержит, в свою очередь, этап последовательной отправки множества электромагнитных зондирующих сигналов разных частот в конструкцию. Другими словами, последовательность электромагнитных зондирующих сигналов разных частот генерируется один за другим, и каждый из данных сигналов отправляется в подлежащую зондированию конструкцию.
Этап приема отраженного сигнала содержит, в свою очередь, этап приема отраженного сигнала для каждого из упомянутых зондирующих сигналов и определения амплитуды и фазы для каждого из отраженных сигналов. Другими словами, для каждого зондирующего сигнала определяют амплитуду и фазу отраженного сигнала, например, посредством определения действительной и мнимой частей комплексной амплитуды данного сигнала.
Этап определения внутренних характеристик содержит использование амплитуды и сдвига фазы упомянутых отраженных сигналов.
Приведенный метод базируется на идее, что импульсы традиционной системы можно также заменить последовательностью (более продолжительных) зондирующих сигналов, при этом зондирующие сигналы отличаются друг от друга по их частотам. Следовательно, измерение выполняется, в некотором смысле, в частотной области. Данные в частотной области можно анализировать со сниженными частотами дискретизации, что сокращает потребности технологии в электропитании.
Заявленное устройство для осуществления изобретения содержит:
– Антенну: Антенна служит для ввода электромагнитной волны в бетонную конструкцию и для приема отраженного из нее сигнала.
– Генератор зондирующего сигнала для генерации электромагнитной волны, подлежащей отправке в упомянутую конструкцию.
– Приемник отраженного сигнала для обработки отраженного сигнала из упомянутой конструкции.
– Блок управления для управления генератором зондирующего сигнала и приемником отраженного сигнала. Блок управления сконструирован и выполнен с возможностью выполнения способа в соответствии с настоящим изобретением.
Каждый зондирующий сигнал предпочтительно содержит несущий сигнал, модулированный модулирующим сигналом. Частота несущего сигнала составляет, по меньшей мере, 100 МГц, и частота модулирующего сигнала не превышает 10 МГц. Индивидуальные зондирующие сигналы различаются по частоте их несущих сигналов, т.е. частота несущего сигнала изменяется между следующими один за другим зондирующими сигналами.
Затем отраженные сигналы демодулируются на частоте несущего сигнала, т.е. модулированный сигнал выделяется для каждого отраженного сигнала посредством демодуляции.
Данное решение выгодно тем, что демодулированный сигнал не является сигналом постоянного тока, что повышает устойчивость к дрейфу и 1/f–шуму (фликкер–шуму).
Частота модулирующего сигнала составляет, по меньшей мере, 0,5 МГц, поскольку фликкер–шум является низким на данных частотах, и поскольку перекрестные помехи находятся за пределами анализируемого спектра.
В другом предпочтительном варианте осуществления частота модулирующего сигнала является одинаковой для всех упомянутых зондирующих сигналов. Это упрощает генерацию и демодуляцию сигналов.
Устройство предпочтительно содержит:
– Аналоговый модулятор для модуляции несущего сигнала модулирующим сигналом, чтобы генерировать зондирующие сигналы. Частота несущего сигнала составляет, по меньшей мере, 100 МГц, и частота модулирующего сигнала не превышает 10 MHz. Разные зондирующие сигналы различаются по частоте их несущих сигналов.
– Аналоговый демодулятор для демодуляции отраженных сигналов на частоте несущего сигнала. Сигнал, демодулированный таким образом, называется «демодулированным отраженным сигналом. Демодулятор предпочтительно содержит умножитель для перемножения отраженных сигналов с сигналом, имеющим частоту несущего сигнала.
Посредством выполнения модуляции и демодуляции в аналоговых схемах, можно дополнительно снизить энергопотребление и тактовую частоту цифровых схем.
Демодулированный отраженный сигнал предпочтительно подается в аналого–цифровой преобразователь для его преобразования в цифровые значения. Устройство дополнительно содержит процессор сигналов для цифровой обработки упомянутых цифровых значений. Это базируется на понимании, что частота демодулированного сигнала является достаточно низкой для эффективной и точной цифровой обработки с низким потреблением мощности.
Способ предпочтительно содержит дополнительный этап определения набора амплитуд и фаз разных отраженных сигналов, который затем можно использовать для дополнительного анализа. Каждые амплитуда и фаза данного набора описывают амплитуду и фазу одной частоты зондирующих сигналов.
Амплитуда и фаза могут определяться, соответственно, в явной форме (например, в Вольтах и радианах) или в форме параметра, из которого амплитуду и фазу можно вычислить в явной форме, (например комплексного значения, абсолютное значение которого пропорционально амплитуде, и фаза которого описывает фазу сигнала).
В предпочтительном варианте способ дополнительно содержит этап индивидуальной фильтрации амплитуды и/или фазы каждого отраженного сигнала. В данном контексте, фильтрация означает преобразование амплитуды или фазы в новое фильтрованное значение. И «индивидуальная» фильтрация означает, что данное преобразование зависит от частоты соответствующего зондирующего сигнала, который породил данный отраженный сигнал.
В частности, фаза может сдвигаться на смещение фазы, и/или амплитуда может пересчитываться умножением на коэффициент пересчета, где смещение фазы и коэффициент пересчета зависит от частоты соответствующего зондирующего сигнала (т.е. отраженного сигнала, который имел данные амплитуду и/или фазу). Такая индивидуальная фильтрация имеет различные применения:
a) В первом случае применения, данную фильтрацию можно использовать для компенсации частотной характеристики компонентов устройства в измерениях. В данном случае, изобретение содержит следующие этапы:
– обеспечивают калибровочные данные, характеризующие частотную характеристику устройства, применяемого для выполнения способа, и
– используют упомянутые калибровочные данные на упомянутом этапе фильтрации для компенсации частотной характеристики.
b) Во втором случае применения, фильтрацию можно использовать для присвоения весов данным, соответствующим индивидуальным частотам зондирующих сигналов, перед их Фурье–преобразованием. Это позволяет генерировать моделированный сигнал отклика во временной области для произвольного моделируемого зондирующего сигнала во временной области. Присвоение весов может также служить для совершенствования затухания в полосе запирания. В данном случае, изобретение содержит следующие этапы:
– обеспечивают последовательность амплитуд и фаз спектра Фурье, характеризующих Фурье–преобразование искомого зондирующего сигнала во временной области, и
– используют упомянутые амплитуды и фазы спектра Фурье на упомянутом этапе фильтрации для генерации моделированного сигнала отклика во временной области.
В еще одном предпочтительном варианте осуществления изобретение содержит этап замены поднабора из набора амплитуд и фаз оценочными амплитудами и/или фазами. Это позволяет исключить отдельные частотные составляющие из принятого сигнала, в частности, составляющие, подверженные сильному шуму. Это особенно полезно для подавления типичных частот сети WiFi. Следовательно, в предпочтительном варианте, по меньшей мере, некоторые из поднабора заменяемых амплитуд и фаз характеризуют зондирующие сигналы, имеющие частоты между 2,4 и 2,4835 ГГц и/или между 5,15 и 5,35 ГГц, и/или между 5,47 и 5,725 ГГц.
Способ предпочтительно содержит этап вычисления оценочных амплитуд и/или фаз с использованием интерполяции и/или экстраполяции из амплитуд и фаз, которые не являются частью упомянутого поднабора.
В еще одном предпочтительном варианте осуществления способ содержит следующие этапы:
– Обеспечивают набор частотно–зависимых амплитуд зондирующих сигналов, характеризующих амплитуды сигналов упомянутых зондирующих сигналов. В данном контексте, термин «частотно–зависимые» означает, что не все зондирующие сигналы на различных частотах имеют одинаковую амплитуду.
– Используют упомянутые амплитуды зондирующих сигналов для индивидуального управления амплитудами сигналов зондирующих сигналов.
Таким образом, амплитуды индивидуальных зондирующих сигналов можно изменять в зависимости от их частоты. Это позволяет ослабить спектральный шум на частотах, на которых законодательные или технические требования указывают, что радиоизлучение должно быть слабым.
Краткое описание чертежей
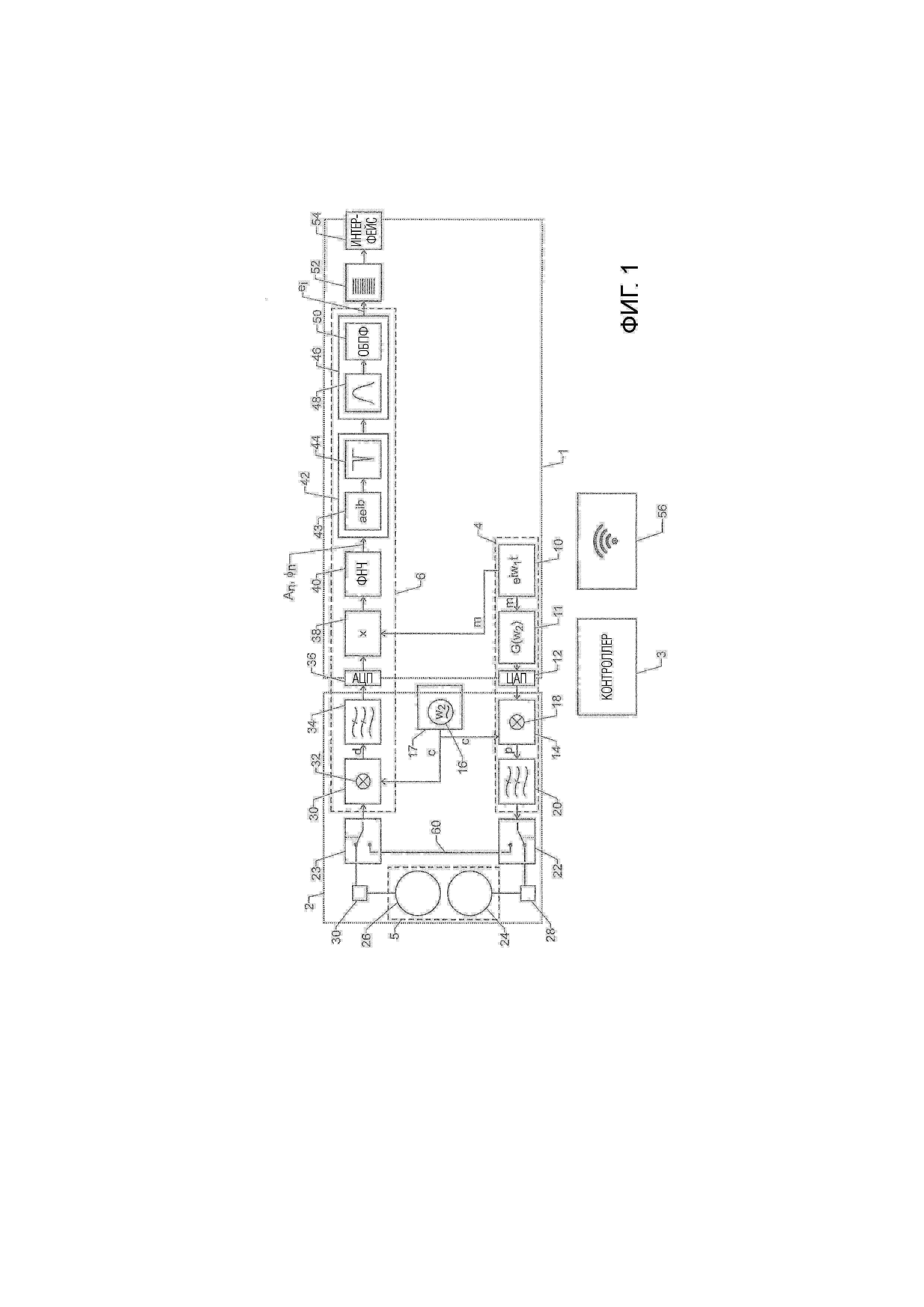
Изобретение будет легче понять, и цели, отличающиеся от вышеизложенных целей, станут очевидными, когда будет рассмотрено последующее подробное описание изобретения. Данное описание содержит ссылки на чертеж, который представляет блок–схему устройства для электромагнитного зондирования конструкции из бетона.
Варианты осуществления изобретения
Общее представление:
Устройство на фиг. 1 содержит первую секцию 1 схем цифровой обработки и вторую секцию 2 схем аналоговой обработки.
Первая секция 1 предпочтительно реализована схемой FPGA (эксплуатационно–программируемой логической матрицей) или с использованием какой–то другой схемотехники, допускающей реализацию последовательной логики.
Устройство дополнительно содержит блок 3 управления, который может быть реализован, по меньшей мере, частично, как составная часть первой секции 1 и/или как отдельное цифровое устройство, например, микропроцессор.
Наиболее важными частями настоящего устройства являются:
– Генератор 4 зондирующего сигнала, сконструированный и выполненный с возможностью генерации электромагнитной волны, подлежащей отправке в подлежащую зондированию конструкцию.
– Антенна 5 для ввода электромагнитной волны в конструкцию и для приема отраженного сигнала из конструкции.
– Приемник 6 отраженного сигнала, сконструированный и выполненный с возможностью обработки отраженного сигнала.
Функции и конструкция упомянутых составных частей подробно описаны в последующих разделах.
Генератор зондирующего сигнала:
Генератор 4 зондирующего сигнала содержит источник 10 модулирующего сигнала. Данный источник предпочтительно реализован в виде цифрового генератора в первой секции 1. Он генерирует последовательность значений m модулирующего сигнала, которые предпочтительно в виде временной последовательности комплексных чисел

где ω1 называется частотой модуляции. Данная частота предпочтительно не превышает 10 МГц, в частности, не превышает 5 МГц, чтобы сделать значения модулирующего сигнала удобными для обработки в цифровых схемах малой мощности. С другой стороны, ω1 предпочтительно больше, чем 0,5 МГц, чтобы находиться в диапазоне, в котором фликкер–шум аналоговой секции 2 является низкий, и перекрестные помехи находятся за пределами анализируемого спектра. В предпочтительном варианте осуществления частота модуляции ω1 равна 2 МГц.
Последовательность значений m может быть, как очевидно специалисту, представлена в виде последовательности действительной и мнимых частей комплексных значений, или в виде последовательности значений амплитуд и фаз.
Значения m модулирующего сигнала подаются в пересчетный блок 11. Данный блок генерирует последовательность пересчитанных значений m’ модулирующего сигнала
где G(ω2) означает коэффициенты пересчета, которые изменяются с несущей частотой ω2. Коэффициенты G(ω2) пересчета задают амплитуды зондирующих сигналов и позволяют этим амплитудам изменяться для различающихся несущих частот ω2. Роль несущей частоты ω2 подробно описана ниже.
Пересчет, зависящий от несущей частоты, осуществляемый пересчетным блоком 11, позволяет уменьшать амплитуду зондирующих сигналов для таких несущих частот, на которых спектральные излучения устройства должны быть слабыми.
Пересчетный блок 11 является необязательным. Если данный блок отсутствует, то получается m’=m (при необходимости, пересчитывается с помощью постоянного значения).
Пересчитанные значения модулирующего сигнала m’ подаются в цифроаналоговый преобразователь 12, который, например, генерирует аналоговые сигналы, представляющие действительную и мнимую части от m’.
Сигналы из преобразователя 12 подаются в модулятор 14, в котором они смешиваются с несущей c, имеющей несущую частоту ω2, чтобы генерировать зондирующий сигнал p, содержащий несущий сигнал, модулированный модулирующим сигналом.
Несущая c генерируется аналоговым генератором 16, частота ω2 которого может управляться блоком 3 управления.
Аналоговый генератор 16 предпочтительно является составной частью программируемого синтезатора 17 частот, в частности VCO (управляемого напряжением генератора) такого синтезатора. Примером подходящей схемы является, например, ADF4351 от Analog Devices, Inc.
Как упоминалось, несущая частота ω2 предпочтительно составляет, по меньшей мере, 100 МГц. Блок 3 управления изменяет ее во времени, чтобы генерировать последовательность N электромагнитных зондирующих сигналов с N различающимися частотами ω2.1 … ω2.N.
Модулятор 14 предпочтительно является квадратурным смесителем (квадратурным модулятором), содержащим модулирующий умножитель 18 для перемножения несущей c с подходящими сдвинутыми по фазе значениями аналоговых значений m’ модулирующего сигнала.
Как упоминалось, зондирующий сигнал p, генерируемый модулятором 14, является, по существу, несущим сигналом c, модулированный (низкочастотным) модулирующим сигналом m’.
Зондирующий сигнал p отправляется через фильтр 20 зондирующего сигнала, чтобы срезать гармонические частоты несущей частоты ω2. Фильтр 18 зондирующего сигнала предпочтительно является программируемым фильтром низких частот с частотой среза, которая может устанавливаться блоком 3 управления.
Фильтрованный зондирующий сигнал проходит первый переключатель 22, из которого он может селективно отправляться в антенну 5 или во второй переключатель 23. Первый и второй переключатели 22, 23 используются для калибровки устройства. Это будет дополнительно подробно описано далее в разделе Калибровка устройства.
Антенна:
Антенна 5 предпочтительно использует пластинчатую конструкцию, например с двумя круглыми дисками 24, 26, одним для отправки электромагнитной волны в бетонную конструкцию, подлежащую измерению, и одним для приема отраженного сигнала из нее. Вместо пары круглых дисков можно использовать конструкцию симметричного вибратора с треугольными излучателями или любую другую подходящую конструкцию широкополосной антенны.
Между элементами антенны и генератором 4 зондирующего сигнала на стороне входа, а также между элементами антенны и приемником 6 отраженного сигнала на стороне выхода могут быть обеспечены согласующие схемы 28, 30 для согласования импедансов и/или уровней сигналов.
Приемник отраженного сигнала:
Перед вводом в приемник 6 отраженного сигнала, отраженные сигналы проходят второй переключатель 23.
Затем отраженный сигнал подается в демодулятор 30, который является частью приемника 6 отраженного сигнала. Демодулятор 30 предпочтительно является аналоговой схемой, чтобы быть в состоянии обрабатывать высокочастотные сигналы с низким энергопотреблением.
Демодулятор 30 предпочтительно содержит демодулирующий умножитель 32, в котором отраженный сигнал перемножается с несущей c из генератора 16, чтобы демодулировать его и генерировать демодулированный отраженный сигнал d.
Демодулированный отраженный сигнал d предпочтительно пропускается через фильтр 34 аналогового отраженного сигнала, выполненный с возможностью, по меньшей мере, подавления сигналов с частотой выше частоты ω1 модуляции, но не сигналов на частоте ω1 модуляции. Фильтр 34 отраженного сигнала может быть фильтром низких частот или полосовым фильтром. Использование фильтра низких частот предпочтительно, хотя бы, по причине его укороченного времени установления сигнала, что делает возможным применять более короткие зондирующие импульсы.
После фильтра 34 сигнала, демодулированный отраженный сигнал d является, по существу, переменным сигналом на частоте ω1 модуляции. Его амплитуда будет зависеть от того, насколько сильно зондирующий сигнал отражен бетонной конструкцией, и его фаза будет характеризовать сдвиг по фазе между зондирующим сигналом и отраженным сигналом.
В дополнение к компонентам, показанным на фиг. 1, аналоговые схемы приемника 6 отраженного сигнала могут содержать подходящие аналоговые усилители и фильтры.
Затем демодулированный отраженный сигнал d подается в аналого–цифровой преобразователь 36 и вводится в цифровую часть приемника 6 отраженного сигнала, которая формирует процессор сигналов для цифровой обработки демодулированного отраженного сигнала d.
Данный процессор сигналов содержит умножитель 38 для перемножения демодулированного отраженного сигнала d с модулирующим сигналом m, чтобы определить амплитуду и фазу демодулированного отраженного сигнала d на частоте ω1 модулирующего сигнала m. Данные амплитуда A и фаза φ непосредственно зависят от сдвига по фазе отраженного сигнал относительно зондирующего сигнала и от эффективности отражения отраженного сигнала. Однако, они зависят также от собственных свойств аналоговых схем, через которые прошли сигналы, и они могут испытывать воздействие шума. Следовательно, для обработки амплитуды и фазы, A, φ, выполняются дополнительные этапы.
На следующем этапе, значения амплитуды и фазы пропускаются через фильтр 40 низких частот. Данный фильтр предпочтительно интегрирует значения амплитуды и фазы на протяжении, по меньшей мере, 50% и/или не более 90% длительности одиночного зондирующего сигнала. Для зондирующих сигналов длительностью 2 мкс, фильтр 40 низких частот может интегрировать (т.е. усреднять) сигналы в течение, например, 1,5 мкс.
Усредненные амплитуда и фаза, A, φ, на выходе фильтра 40 низких частот могут подвергаться понижающей дискретизации, при необходимости, до одного значения на зондирующий сигнал.
Амплитуда и фаза, A, φ, различаются между следующими один за другим зондирующими сигналами в зависимости от несущей частоты ω2.n зондирующих сигналов. Поэтому, в последующем, они обозначаются индексом n, т.е. An, φn, где n=1 ... N обозначает индекс зондирующего сигнала.
Амплитуды и фазы, An, φn, индивидуальных зондирующих сигналов подаются в блок 42 частотно избирательной фильтрации, который сконструирован и выполнен с возможностью индивидуальной фильтрации амплитуды и/или фазы отраженного сигнала для каждого зондирующего сигнала. Другими словами, блок 42 фильтрации корректирует амплитуду и фазу для каждой из частот ω2.n (где n=1 ... N) зондирующих сигналов.
В варианте осуществления, показанном на фиг. 1, блок 42 фильтрации выполняет две таких операции фильтрации.
На первом этапе, в пересчетном блоке 43, каждая амплитуда и/или фаза пересчитываются и/или смещаются. При выражении амплитуды и фазы в виде комплексных чисел
пересчет и смещение могут выполняться перемножением

где Z’n является скорректированной амплитудой и фазой, an является амплитудной коррекцией зондирующего сигнала с частотой ω2.n, и bn является фазовой коррекцией зондирующего сигнала с частотой ω2.n. Смещение фазы bn и коэффициент пересчета an являются функциями частоты ω2.n соответствующих зондирующих и отраженных сигналов.
В частности, предпочтительно выполнить коррекцию уравнение (4) для компенсации свойств устройства, как будет описано далее в разделе Калибровка устройства.
На следующем этапе, амплитуды и фазы можно, при необходимости, подавать в интерполяционный блок 44. Данный интерполяционный блок сконструирован и выполнен с возможностью замены поднабора из упомянутого набора амплитуд и фаз, An, φn, оценочными амплитудами и/или фазами.
Как упоминалось выше, назначение интерполяционного блока 44 состоит в пропускании индивидуальных частот ω2,n. Например, если одна из данных частот, например, ω2.k, попадает в полосу частот, используемых для связи WiFi, в частности, для связи WiFi, используемой устройством в настоящем случае, она может содержать высокий уровень шумов и паразитных сигналов. В данном случае, оптимальным решением является замена соответствующих амплитуды и фазы, Ak, φk, оценочными значениями A’k, φ’k. В простом случае, если k>1 и k<N, и если частоты ωn разнесены равномерно, то можно воспользоваться, например, линейной интерполяцией


При k=1 или k=N, можно применить линейную экстраполяцию. В качестве альтернативы применению линейной интерполяции или экстраполяции, можно использовать более сложные способы интерполяции, например, на основе методов полиномов более высоких порядков, сплайнов или подбора аппроксимирующей кривой. В качестве еще одной альтернативы, интерполяционный блок 44 может присваивать нулевой вес сигналам на упомянутых индивидуальных частотах ω2,n по методу, подобному тому, который применяется для режекторных фильтров.
Вообще говоря, оценочные амплитуды и/или фазы, A’k, φ’k, вычисляются с использованием интерполяции и/или экстраполяции, по амплитуде и фазе, которые, которые не входят в подлежащий замене поднабор.
Затем, установленные амплитуды и фазы, An, φn, обработанные пересчетным блоком 43 и/или интерполяционным блоком 44 можно использовать для получения информации о бетонной конструкции, которую зондировали. Методы для решения такой задачи известны специалисту.
Однако, в предпочтительном варианте, установленные амплитуды и фазы, An, φn, которые описывают отражательную способность анализируемую конструкцию в частотной области, сначала преобразуются во сигнал отклика во временной области посредством их Фурье–преобразования. Это обусловлено тем, что многие инструментальные средства, используемые для обработки данных отражения бетонных образцов, основаны на анализе данных во временной области, т.е. на анализе амплитуды отраженного сигнала в форме короткого импульса, отправленного в конструкцию (анализ развертки типа A).
Данный этап может выполняться модуль 46 Фурье–преобразования. Он содержит спектральный фильтр блок 48 спектральной фильтрации и блок 50 обратного Фурье–преобразования.
Блок 48 спектральной фильтрации пересчитывает амплитуды An посредством уменьшения веса составляющих с нижней и верхней сторон спектрального диапазона. Это может выполняться в блоке, подобном пересчетному блоку 43, т.е. амплитуды и фазы, An, φn, каждой спектральной составляющей могут умножаться на комплексные коэффициенты Sn пересчета.
Например, Sn могут быть заданы следующим образом:

Данная функция описывает окно с весовой обработкой. Например, можно использовать окно Ханна окна Тьюки. В данном случае, Sn являются действительными значениями и применяются как к действительной, так и к мнимой частям комплексных амплитудно–фазовых значений.
Назначением блока 48 спектральной фильтрации является пересчет спектральных амплитуд (и, при необходимости, смещение фазы) таким образом, чтобы они представляли Фурье–преобразование короткого волнового цуга, фактически генерируемого обычными импульсными зондирующими устройствами. Взвешивание можно также использовать, чтобы усовершенствовать затухание в полосе запирания.
На следующем этапе, амплитуды и фазы, An, φn, пересчитанные в блоке 48 спектральной фильтрации, подаются для обратного Фурье–преобразования в блоке 50 обратного Фурье–преобразования. Тем самым генерируется временная последовательность ei отраженного сигнала в том виде, в котором он вернулся бы, при отправке волнового цуга, используемого для вычисления коэффициентов Sn пересчета, в бетонную конструкцию.
Полученная временная последовательность ei и/или амплитуды и фазы, An, φn, обработанные пересчетным блоком 43 и/или интерполяционным блоком 44, можно затем сохранить в буфере 52, который может считываться через интерфейс 54.
Устройство, изображенное на фиг. 1 может дополнительно содержать WiFi–интерфейс 56 для беспроводной связи, в частности, для беспроводной связи на основе, по меньшей мере, одного из стандартов IEEE 802.11. Благодаря селективной интерполяции/экстраполяции частотных составляющих, выполняемой интерполяционным блоком 44, работа WiFi–интерфейса 56 не мешает измерениям.
WiFi–интерфейс 56 может быть использован, например, внешними устройствами для доступа к данным через интерфейс 54 и/или для связи с блоком 3 управления.
Порядок работы:
Как упоминалось выше, блок 3 управления управляет устройством для генерации последовательности электромагнитных зондирующих сигналов с несущими частотами ω2.1 ... ω2.N, каждый из которых модулируется с частотой ω1.
Число N разных зондирующих сигналов предпочтительно является достаточно большим для удовлетворительных разрешения и диапазона, например, N≥190, в частности N≥380.
Несущие частоты ω2.n предпочтительно перекрывают спектральный диапазон, превосходящий 3,8 ГГц.
Например, спектральный диапазон несущих частот ω2.n простирается от 200 МГц до 4 ГГц.
Несущие частоты ω2.n предпочтительно разнесены равномерно по их спектральному диапазону, например, с шагом 10, 20 или 40 МГц. В конкретном предпочтительном варианте осуществления пользователь может выбирать ширину шага, чтобы находить искомый компромисс между разрешением (диапазоном) и скорость измерения.
Длительность каждого зондирующего импульса предпочтительно составляет, по меньшей мере, один период частоты модуляции. С учетом того, что различные фильтры нуждаются в некотором времени для установления сигнала, длительность лучше всего выбрать в 2 раза больше периода частоты модуляция, например, в 3 раза больше упомянутого периода. При частоте модуляции ω1=2 МГц, длительность каждого импульса составляет, например, 2 мкс (что равно четырехкратному периоду).
Для каждого зондирующего импульса n, блок 3 управления устанавливает следующие параметры:
– Частоту ω2.n генератора 16.
– Значение G(ω2.n) для использования пересчетным 11 блоком.
– Такую частоту среза фильтра 20 зондирующего сигнала, чтобы она была выше, чем ω2.n, но ниже, чем 2∙ω2.n.
– Амплитудную коррекцию an и фазовую коррекцию bn для использования в пересчетном блоке 43.
– Параметры настройки интерполяционного блока 44. Данные параметры настройки могут быть получены из инвариантной постоянной информации, например, основанной на знании частотных полос, которые наиболее подвержены сильным шумам в сигнале. В качестве альтернативы, устройство может динамически измерять или определять окружающие радиочастотные (РЧ) шумы, например, посредством их сканирования радиоприемником и/или посредством получения зашумленных частотных полос из текущей работы WiFi–интерфейса 56. В зависимости от данных измеренных или найденных РЧ шумов, параметры настройки интерполяционного блока 44 можно адаптировать соответственно текущему рабочему режиму.
После обеспечения всех N зондирующих импульсов, сигнал во временной области может быть вычислен модулем 46 Фурье–преобразования и сохранен в буфере 52, вместе с амплитудами и фазами An, φn.
Калибровка устройства:
Как упоминалось, пересчетный блок 43 можно использовать для компенсации свойств устройства. В частности, компоненты аналоговой секции 2 настоящего устройства, например, фильтр 20 зондирующего сигнала, фильтр 34 отраженного сигнала и различные усилители (не показанные) будут вносить фазовые задержки, а также колебания коэффициента усиления, которые зависят от несущей частоты ω2.n.
Если, например, данные эффекты приводят к смещению фазы δn и коэффициенту усиления qn на несущей частоте ω2.n, то фильтр 20 зондирующего сигнала можно настроить на коррекцию амплитуд и фаз, An, φn, в уравнении (4) путем использования an=1/qn и bn=–δn.
Другими словами, смещение фазы δn и коэффициент усиления qn являются калибровочными данными, описывающими частотную характеристику устройства, и их можно использовать для фильтрации амплитуд и фаз, An, φn.
Калибровочные параметры можно получить теоретически и/или путем измерений на выборочных устройствах. Однако в предпочтительном варианте устройство может быть оборудовано собственным средством для динамического и повторяющегося определения калибровочных данных. Это позволяет компенсировать эффекты дрейфа, обусловленные старением устройства и изменением условий окружающей среды.
В варианте осуществления на фиг. 1, устройство оборудовано блоком калибровки, содержащим первый и второй переключатели 22, 23 для обхода антенны 5. Фиг. 1 представляет данные переключатели в их положении измерения. Однако, блок 3 управления может переключить их в положение калибровки, и в этом случае зондирующие сигналы обходят антенну 5 и отправляются через шунтирующую линию 60 непосредственно в приемник 6 отраженного сигнала.
Для калибровки устройства, блок 3 управления переключает переключатели 22, 23 в их положения калибровки и затем предписывает генератору 4 зондирующего сигнала генерировать последовательность N зондирующих импульсов с несущими частотами ω2.1 ... ω2.N в точности как в процессе нормального измерения, но он приравнивает an и bn пересчетного блока 43 к постоянным значениям, например, 1 и 0, соответственно. Это позволяет устройству измерять калибровочные данные δn и qn. При необходимости, эти данные могут подвергаться дополнительной коррекции, заданной на предприятии–изготовителе, с учетом частотной характеристики антенны 5 и ее согласующих схем 28, 30.
Примечания:
Как упоминалось выше, первая цифровая секция 1 настоящего устройства предпочтительно представляет собой FPGA. Данная матрица предпочтительно содержит компоненты, используемые для генерации модулирующего сигнала на частоте ω1, т.е. источник 10 модулирующего сигнала и (при наличии) пересчетный блок 11. Данная матрица содержит также умножитель 38, который позволяет выполнять высокочувствительное и высокоточное фазовое детектирование отраженных сигналов. FPGA может дополнительно содержать компоненты приемника 6 сигнала, который обрабатывает амплитуды и фазы, An, φn, из умножителя 38.
С другой стороны, схемы, обрабатывающие сигналы на несущих частотах ω2.n, предпочтительно являются аналоговыми схемами, в частности, умножители 18, 32, генератор 16 и фильтры 20, 34.
В сущности, представленное здесь устройство способно точно зондировать конструкцию из бетона с низким энергопотреблением. Для этого, устройство генерирует последовательность зондирующих сигналов с заданными несущими частотами посредством генератора 4 зондирующего сигнала. Зондирующие сигналы вводятся в конструкцию из бетона посредством антенны 5. Возвращающиеся обратно отраженные сигналы обрабатываются приемником 6 отраженного сигнала. Обработка включает в себя детектирование фаз и амплитуд в умножителе 38, частотно–избирательный пересчет в пересчетном блоке 43, замену измеренных фаз и амплитуд в интерполяционном блоке 44 и генерацию данных во временной области в модуле 46 Фурье–преобразования. Его конструкция делает устройство устойчивым к РЧ шуму и точным, и его архитектура допускает реализации с низким энергопотреблением.
В настоящей заявке представлены и описаны варианты осуществления изобретения, предпочтительные в настоящее время, однако, следует четко понимать, что изобретение ими не ограничено, но допускает иные различные варианты осуществления и практические исполнения в пределах объема притязаний следующей формулы изобретения.
Реферат
Группа изобретений относится к зондированию конструкции из бетона для определения ее внутренних характеристик. Представлен способ зондирования конструкции из бетона, содержащий этапы, на которых: отправляют электромагнитную волну в упомянутую конструкцию посредством антенны, принимают отраженный сигнал упомянутой электромагнитной волны из упомянутой конструкции посредством упомянутой антенны, определяют внутренние характеристики упомянутой конструкции по упомянутому отраженному сигналу. При этом этап отправки электромагнитной волны в упомянутую конструкцию содержит этап, на котором последовательно отправляют множество электромагнитных зондирующих сигналов разных частот в упомянутую конструкцию. Этап приема упомянутого отраженного сигнала содержит этапы, на которых принимают отраженный сигнал для каждого из упомянутых зондирующих сигналов и определяют амплитуду и фазу для каждого из упомянутых отраженных сигналов. Определяют внутренние характеристики с использованием упомянутых амплитуды и фазы отраженных сигналов. Несущие сигналы для упомянутых зондирующих сигналов генерируют посредством аналогового генератора с перестраиваемой частотой, а упомянутые отраженные сигналы демодулируют в аналоговом демодулирующем умножителе, в котором они перемножаются с сигналом из упомянутого аналогового генератора. Также описано устройство для выполнения указанного способа. Достигается повышение надежности зондирования и снижение энергопотребления. 2 н. и 19 з.п. ф-лы, 1 ил.
Комментарии