Гибридная роторная управляемая система и способ - RU2721982C1
Код документа: RU2721982C1
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ
[1] Данное изобретение относится в целом к системе и способу наклонно-направленного бурения и, в частности, к гибридной роторной управляемой системе и способу, которые объединяют функции системы с направлением долота и системы с отклонением долота.
УРОВЕНЬ ТЕХНИКИ
[2] Нефтяная или газовая скважина часто имеет подповерхностный участок, который необходимо бурить с использованием наклонно-направленного бурения. Роторные управляемые системы, также известные как «РУС», предназначены для наклонно-направленного бурения с непрерывным вращением с поверхности и могут использоваться для бурения ствола скважины в ожидаемом направлении и по ожидаемой траектории путем управления направлением утяжеленной бурильной трубы во время ее вращения. Таким образом, роторные управляемые системы широко используются при бурении таких скважин, как обычные наклонные скважины, горизонтальные скважины, ответвляющиеся скважины и т. д. Как правило, существует два типа роторных управляемых систем: системы «с отклонением долота» и системы «с направлением долота».
[3] В системе с направлением долота точечное направление бурового долота изменяется путем изгиба вала долота относительно остальной части компоновки низа бурильной колонны (КНБК). В идеализированной форме буровому долоту системы с направлением долота не нужно резать вбок, потому что ось долота постоянно совмещена с направлением ствола скважины, которую бурят.
[4] В системе с отклонением долота направление бурения изменяется путем приложения бокового усилия (усилия в направлении управления бурением, которое находится под углом к направлению прохождения ствола скважины) к утяжеленной бурильной трубе, чтобы толкать буровое долото для его отклонения от центра ствола скважины. Боковое усилие обычно прикладывается к утяжеленной бурильной трубе исполнительным узлом, таким как одна или более опорных подкладок. В идеализированной форме буровое долото системы с отклонением долота должно резать вбок, чтобы изменять направление бурения.
[5] В общем, система с отклонением долота имеет высокий темп набора кривизны, но образует неплавную траекторию бурения и шероховатые стенки скважины, тогда как система с направлением долота образует относительно более плавную траекторию бурения и более гладкие стенки скважины, но имеет относительно низкий темп набора кривизны. То, как повысить эффективность, темп набора кривизны и качество ствола скважины при наклонно-направленном бурении для добычи нефти и газа, всегда представляет собой довольно сложную задачу.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[6] Роторная управляемая буровая система содержит утяжеленную бурильную трубу, буровое долото и вал долота, соединяющий буровое долото с утяжеленной бурильной трубой. Вал долота соединен с утяжеленной бурильной трубой через соединение, способное передавать крутящий момент от утяжеленной бурильной трубы на вал долота, и выполнен с возможностью поворота относительно утяжеленной бурильной трубы вокруг соединения. Роторная управляемая буровая система дополнительно содержит первое эксцентриковое колесо и второе эксцентриковое колесо, соединенные с валом долота и вращающиеся для поворота вала долота относительно утяжеленной бурильной трубы вокруг соединения, контроллер для управления первым и вторым эксцентриковыми колесами для согласованного вращения таким образом, что поворот вала долота относительно утяжеленной бурильной трубы, по существу, компенсирует вращение утяжеленной бурильной трубы, и активный стабилизатор, установленный на валу долота и способный толкать вал долота для его отклонения, чтобы вызвать боковое смещение и изменить угол наклона бурового долота для изменения направления бурения.
[7] Способ роторного управляемого бурения включает в себя бурение ствола скважины с помощью бурового долота, соединенного с утяжеленной бурильной трубой через вал долота, при одновременном вращении утяжеленной бурильной трубы, вала долота и бурового долота. Способ дополнительно включает в себя вращение первого эксцентрикового колеса и второго эксцентрикового колеса, соединенных с валом долота, для поворота вала долота относительно утяжеленной бурильной трубы вокруг соединения, приспособленного для соединения вала долота с утяжеленной бурильной трубой, и передачи крутящего момента от утяжеленной бурильной трубы на вал долота. Способ дополнительно включает в себя управление первым и вторым эксцентриковыми колесами для согласованного вращения таким образом, что поворот вала долота относительно утяжеленной бурильной трубы, по существу, компенсирует вращение утяжеленной бурильной трубы, и толкание вала долота для отклонения, чтобы вызвать боковое смещение бурового долота для изменения направления бурения во время бурения с помощью активного стабилизатора, установленного на валу долота.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[8] Вышеуказанные и другие аспекты, признаки и преимущества данного изобретения станут более очевидными в свете последующего подробного описания, рассматриваемого вместе с прилагаемыми графическими материалами, в которых представлено следующее.
[9] На фиг. 1 проиллюстрирован схематический вид в продольном сечении части гибридной роторной управляемой системы в соответствии с одним вариантом реализации данного изобретения, который показывает буровое долото и компоновку низа бурильной колонны (КНБК) гибридной роторной управляемой системы.
[10] На фиг. 2 проиллюстрирован увеличенный вид части А, показанной на фиг. 1.
[11] На фиг. 3 проиллюстрирован схематический вид в поперечном сечении КНБК в соответствии с фиг. 1 по линии B-B.
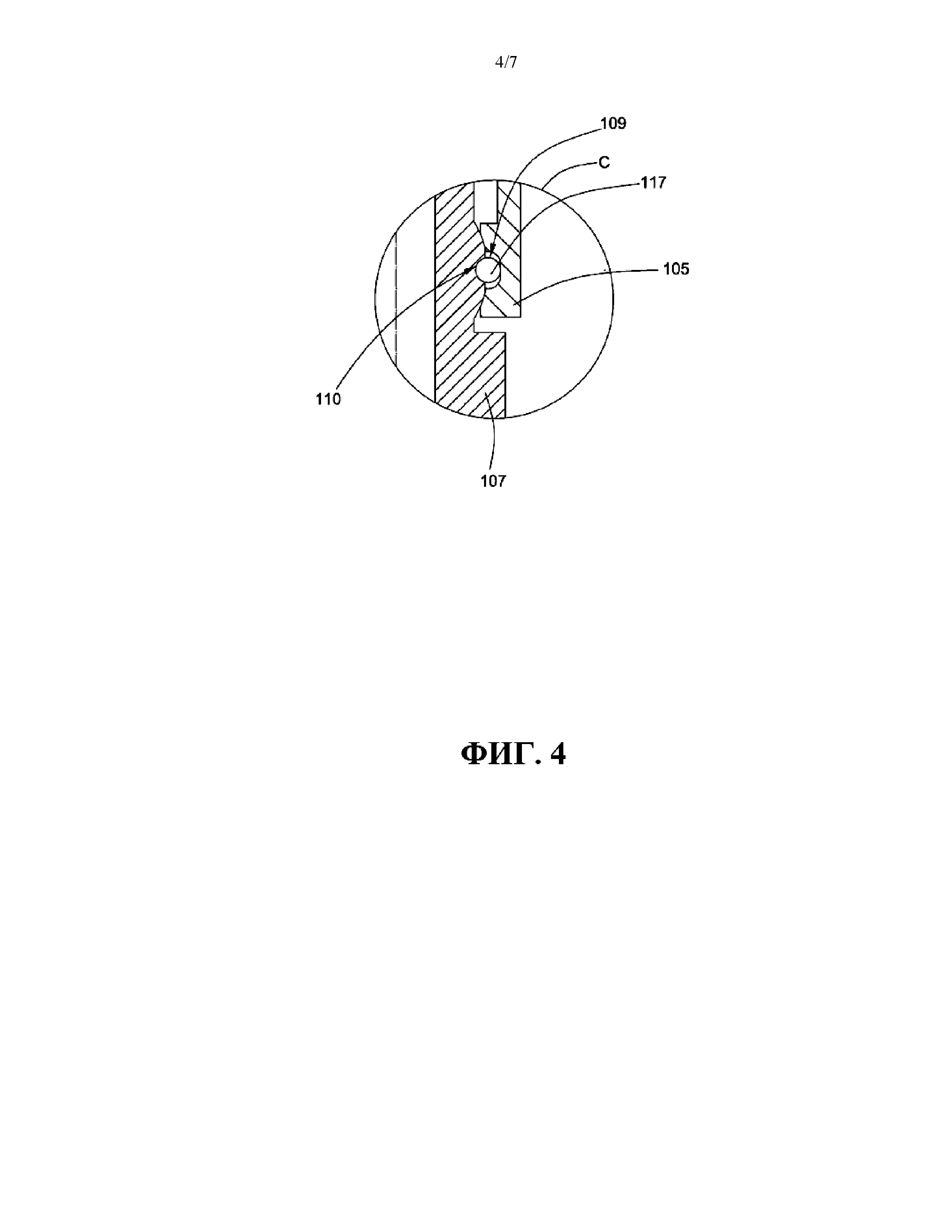
[12] На фиг. 4 проиллюстрирован увеличенный вид части C, показанной на фиг. 1.
[13] На фиг. 5 проиллюстрирован схематический вид, показывающий взаимодействие двух эксцентриковых колес гибридной роторной управляемой системы в соответствии с фиг. 1.
[14] На фиг. 6 проиллюстрирован схематический вид в поперечном сечении КНБК в соответствии с фиг. 1 по линии D-D.
[15] На фиг. 7 проиллюстрирован схематический вид, показывающий состояние гибридной роторной управляемой системы в соответствии с фиг. 1, когда она используется для управления, чтобы устанавливать или изменять кривизну во время бурения.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[16] Далее будут описаны один или более вариантов реализации данного изобретения. Если не указано иное, технические и научные термины, используемые в данном документе, имеют то же значение, которое обычно понимается специалистом в области техники, к которой относится данное изобретение. Термины «первый», «второй» и тому подобные, используемые в данном документе, не обозначают какой-либо порядок, количество или значимость, а скорее используются для различения одного элемента от другого. Кроме того, термины, приведенные в единственном числе, не обозначают ограничение количества, а скорее обозначают наличие по меньшей мере одной из ссылочных элементов. Термин «или» подразумевает включение элемента и означает любой, некоторые или все из перечисленных элементов. Использование терминов «включающий», «содержащий» или «имеющий» и их вариаций в данном документе подразумевает включение элементов, приведенных после них, и их эквивалентов, а также дополнительных элементов. Термин «связанный» или «соединенный» или тому подобное включает, но не ограничивается этим, физическое или механическое соединение и может подразумевать прямое или косвенное соединение.
[17] Варианты реализации данного изобретения относятся к роторной управляемой системе бурения и способу и, в частности, к гибридной роторной управляемой системе и способу наклонно-направленного бурения буровой скважины или ствола скважины. Гибридная роторная управляемая система и способ объединяют режимы управления с направлением долота и управления с отклонением долота в единую схему и могут значительно повысить темп набора кривизны.
[18] На фиг. 1 проиллюстрирован схематический вид в продольном сечении части гибридной роторной управляемой системы 100, который показывает компоновку низа бурильной колонны (КНБК) 101 и буровое долото 103 гибридной роторной управляемой системы 100. Буровое долото 103 соединено с бурильной колонной (утяжеленной бурильной трубой) 105 через вал 107 долота. Вал 107 долота соединен с утяжеленной бурильной трубой 105 через соединение 108, вокруг которого вал 107 долота может поворачиваться относительно утяжеленной бурильной трубы 105. Соединение 108 может представлять собой гибкое соединение, такое как универсальный шарнир. Посредством такого гибкого соединения вал 107 долота может поворачиваться, но не может вращаться относительно утяжеленной бурильной трубы 105, и крутящий момент может передаваться от соединения 105 на вал 107 долота. В некоторых вариантах реализации изобретения вал 107 долота имеет продольную трубчатую форму и содержит верхнюю секцию 111 над соединением 108 и нижнюю секцию 113 под соединением 108. Соединение 108 между верхней секцией 111 и нижней секцией 113 соединено с утяжеленной бурильной трубой 105 рядом с передним концом 115 утяжеленной бурильной трубы 105, имеющим верхнюю секцию 111 внутри утяжеленной бурильной трубы 105 и нижнюю секцию 113 за пределами утяжеленной бурильной трубы 105. Поворот вала 107 долота относительно утяжеленной бурильной трубы 105 может привести к наклону бурового долота 103 в требуемом направлении, как в системе с направлением долота.
[19] Кроме того, гибридная роторная управляемая система 100 дополнительно содержит активный стабилизатор 141 для толкания вала 107 долота и утяжеленной бурильной трубы 105 для отклонения, чтобы создать боковое смещение бурового долота 103, как в системе с отклонением долота. Комбинация наклона и бокового смещения бурового долота 103 увеличивает смещение бурового долота 103, чтобы повысить темп набора кривизны, по сравнению с чистой системой с направлением долота или с отклонением долота.
[20] На фиг. 2 проиллюстрирован увеличенный вид части А, показанной на фиг. 1. Как проиллюстрировано на фиг. 1 и фиг. 2, в КНБК 101 установлены по меньшей мере два двигателя 121 и 123. Каждый из двигателей 121 и 123 может иметь аналого-цифровой преобразователь (не показан), который преобразует механическое движение в электрический сигнал для измерения и контроля скорости вращения и/или положения двигателя. Оба двигателя 121 и 123 вращают два эксцентриковых колеса 125 и 127 соответственно. В некоторых вариантах реализации изобретения оси вращения эксцентриковых колес 125 и 127, по существу, параллельны друг другу. В частности, первый двигатель 121 приводит во вращение первое эксцентриковое колесо 125 через первую цепь 160 зубчатых передач привода, содержащую, например, зубчатые передачи 161 и 163, а второй двигатель 123 приводит во вращение второе эксцентриковое колесо 127 через вторую цепь 170 зубчатых передач привода, содержащую, например, зубчатые передачи 171, 173, 175 и 177. В некоторых вариантах реализации изобретения первая цепь 160 зубчатых передач привода содержит по меньшей мере одну зубчатую передачу, закрепленную с первым эксцентриковым колесом 125, и вторая цепь 170 зубчатых передач привода содержит по меньшей мере одну зубчатую передачу, закрепленную со вторым эксцентриковым колесом 127. Используемый в данном документе термин «закрепленная с первым или вторым эксцентриковым колесом» означает, что она выполнена как одно целое с первым или вторым эксцентриковым колесом или прикреплена к первому или второму эксцентриковому колесу посредством одного или более крепежных элементов, таких как болты. Как проиллюстрировано на фиг. 1 и фиг. 2, зубчатая передача 163 в первой цепи 160 зубчатых передач привода выполнена как одно целое с первым эксцентриковым колесом 125, а зубчатая передача 177 во второй цепи 170 зубчатых передач привода выполнена как одно целое со вторым эксцентриковым колесом 127. Первый двигатель 121 приводит в движение зубчатую передачу 161, чтобы приводить в движение зубчатую передачу 163, закрепленную с первым эксцентриковым колесом 125, и, таким образом, приводит во вращение первое эксцентриковое колесо 125, а второй двигатель 123 приводит в движение зубчатую передачу 171, чтобы приводить в движение зубчатую передачу 173 и зубчатую передачу 175, закрепленную с зубчатой передачей 173, и зубчатая передача 175 приводит в движение зубчатую передачу 177, закрепленную со вторым эксцентриковым колесом 127, и таким образом приводит во вращение второе эксцентриковое колесо 127. В конкретном варианте реализации изобретения, проиллюстрированном на фиг. 1 и фиг. 2, зубчатая передача 173 выполнена как одно целое с зубчатым колесом 175 и поддерживается опорой 180 посредством подшипника 131. Опора 180 закреплена с утяжеленной бурильной трубой 105.
[21] В некоторых вариантах реализации изобретения два эксцентриковых колеса 125 и 127 соединены с верхней секцией 111 вала 107 долота и, в частности, соединены с верхним осевым концом 118 вала 107 долота, тогда как буровое долото 103 соединено с нижней секцией 113 вала 107 долота и, в частности, соединено с нижним осевым концом 119 вала 107 долота. В некоторых конкретных вариантах реализации изобретения буровое долото 103 закреплено на нижнем осевом конце 119 вала 107 долота.
[22] Как проиллюстрировано на фиг. 1 и фиг. 2, эксцентриковые колеса 125 и 127 соединены с валом 107 долота через подшипники вокруг верхнего конца 118 вала 107 долота. В некоторых вариантах реализации изобретения два эксцентриковых колеса 125 и 127 соединены между утяжеленной бурильной трубой 105 и валом 107 долота, при этом эксцентриковое колесо 125 соединено между эксцентриковым колесом 127 и утяжеленной бурильной трубой 105, а эксцентриковое колесо 127 соединено между валом 107 долота и эксцентриковым колесом 125. Между эксцентриковым колесом 125 и утяжеленной бурильной трубой 105 расположен первый подшипник 135, между двумя эксцентриковыми колесами 125 и 127 расположен второй подшипник 137, и между эксцентриковым колесом 127 и валом 107 долота расположен третий подшипник 139. Поворачивая два эксцентриковых колеса 125 и 127, можно подтолкнуть вал 107 долота, чтобы оно начало поворачиваться вокруг соединения 108 для изменения точечного направления бурового долота 103, благодаря чему гибридная роторная управляемая система 100 действует как система с направлением долота. Поворот трубчатого вала 107 долота может изменить положение вала 107 долота с соосного с утяжеленной бурильной трубой 105 на несоосное с утяжеленной бурильной трубой 105.
[23] В некоторых вариантах реализации изобретения, как проиллюстрировано на фиг. 3, соединение 108 представляет собой сферический универсальный шарнир, содержащий множество небольших шаров 117. Эти небольшие шары 117 передают крутящий момент от утяжеленной бурильной трубы 105 на вал 107 долота, так что утяжеленная бурильная труба 105 может вращать вал 107 долота и буровое долото 103 для резания породы при бурении. Как проиллюстрировано на фиг. 1, каждый из этих небольших шаров 117 содержится в промежутке, определенном между утяжеленной бурильной трубой 105 и валом 107 долота. В некоторых вариантах реализации изобретения, как проиллюстрировано на фиг. 4, имеется канавка 109, определенная в утяжеленной бурильной трубе 105, и полость 110, определенная в вале 107 долота, соответствующие каждому из небольших шаров 117, и канавка 109 и полость 110 вместе образуют замкнутое пространство для размещения небольшого шара 117. Замкнутое пространство является избыточным для шара 117 вдоль осевого направления утяжеленной бурильной трубы 105, чтобы позволить валу 107 долота качаться относительно утяжеленной бурильной трубы 105 вокруг соединения 108. В некоторых конкретных вариантах реализации изобретения полость 110, определенная в валу 107 долота, соответствует размеру и форме шара 117, тогда как канавка 109, определенная в утяжеленной бурильной трубе 105, является избыточной для шара 117 вдоль осевого направления утяжеленной бурильной трубы 105.
[24] Снова со ссылкой на фиг. 1 и фиг. 2, во время наклонно-направленного бурения оба двигателя 121 и 123 приводят в движение эксцентриковые колеса 125 и 127 для наклона вала 107 долота относительно утяжеленной бурильной трубы 105 в соединении 108, чтобы создать угол наклона между утяжеленной бурильной трубой 105 и валом 107 долота вокруг соединения 108. В гибридной роторной управляемой системе 100 имеется по меньшей мере один измерительный модуль, такой как модуль измерения в процессе бурения (ИПБ) и по меньшей мере один контроллер (не показан). Измерительный модуль может использоваться для измерения параметров вращения и четкого движения утяжеленной бурильной трубы 105 и вала 107 долота в режиме реального времени. На основании измеренных параметров контроллер может управлять обоими двигателями 121 и 123 для согласованного вращения обоих эксцентриковых колес, чтобы толкать вал 107 долота для поворота, так что поворот, по существу, компенсирует вращение утяжеленной бурильной трубы 105, чтобы стабильно удерживать буровое долото 103 в требуемом направлении, как в системе с направлением долота. В частности, вал 107 долота поворачивается, чтобы обеспечить активное поддержание наклона бурового долота 103 в требуемом направлении относительно пласта, в котором осуществляют бурение, как в системе с направлением долота.
[25] В некоторых вариантах реализации изобретения поворот вала 107 долота управляется посредством перемещения первого и второго эксцентриковых колес 125 и 127. Как проиллюстрировано на фиг. 5 и фиг. 1, O1 является центром утяжеленной бурильной трубы 105 или подшипника 135 (также оси вращения первого эксцентрикового колеса 125), O2 является центром подшипника 137 (также оси вращения второго эксцентрикового колеса 127), и O3 является центром подшипника 139 (также центром верхнего конца 118 вала 107 долота). O1XY представляет собой систему координат, соединенную с утяжеленной бурильной трубой через O1. Но система координат не вращается вместе с утяжеленной бурильной трубой. θ1 представляет собой угол между линией O1O2 и осью X, а θ2 представляет собой угол между линией O1O2 и линией O2O3.
[26] Во время бурения утяжеленная бурильная труба 105 вращается с угловой скоростью Ω. Первое эксцентриковое колесо 125 вращается с угловой скоростью ω относительно утяжеленной бурильной трубы 105. Если Ω равна ω, но с обратным направлением, первое эксцентриковое колесо 125 может оставаться неподвижным относительно фиксированной системы координат O1XY. Таким образом, первое эксцентриковое колесо 125 не вращается в скважине. Кроме того, вторым двигателем 123 можно управлять так, чтобы поддерживать θ2, по существу, постоянным, например, вращая второй двигатель 123 относительно утяжеленной бурильной трубы 105 с регулируемой скоростью, так что смещение активного стабилизатора и точечное направление бурового долота 103 может быть стабильным. Таким образом, система может стабильно бурить ствол скважины.
[27] В некоторых вариантах реализации изобретения расстояние между O1 и O2, по существу, равно расстоянию между O2 и O3. Когда θ2 равен 180 градусам, O3 перекрывается с O1, вал 107 долота не наклоняется относительно утяжеленной бурильной трубы 105, и вал 107 долота не смещается, поэтому буровое долото бурит по прямой линии. Когда O3 не перекрывается с O1, активный стабилизатор 141 может сохранять смещение, пропорциональное расстоянию между O1 и O3 (O1O3) и, в частности, очень близко к расстоянию O1O3. Поэтому, когда O3 не перекрывается с O1, а θ1 и θ2 остаются практически постоянными, буровое долото бурит по дуговой траектории, и темп набора кривизны остается стабильным.
[28] В некоторых конкретных вариантах реализации изобретения ω сохраняется равным Ω с обратным направлением во время бурения. За счет регулирования θ1 и θ2 направление бурения может непрерывно изменяться, и буровое долото может продвигаться вперед по ожидаемой траектории.
[29] На фиг. 6 проиллюстрирован вид в поперечном сечении активного стабилизатора 141, выполненный по линии C-C на фиг. 1. В некоторых вариантах реализации изобретения, как проиллюстрировано на фиг. 1 и фиг. 6, активный стабилизатор 141 закреплен на верхней секции 111 вала 107 долота вблизи верхнего конца 118 верхней секции 111 (который также является верхним концом вала 107 долота) и имеет наружную поверхность 143 для контакта с внутренней поверхностью ствола скважины (не показана на фиг. 1 и фиг. 6), пробуренного буровым долотом. Имеются буртики 145, проходящие через утяжеленную бурильную трубу 105 и проходящие между наружной поверхностью верхней секции 111 и наружной поверхностью 143 активного стабилизатора 141. В частности, наружная поверхность 143 представляет собой кольцевую поверхность, поддерживаемую буртиками 145, и на кольцевой поверхности могут быть углубления для прохождения бурового раствора. При вращении двух эксцентриковых колес 125 и 127 активный стабилизатор 141 ограничен стволом скважины, а его наружная поверхность 143 упирается во внутреннюю поверхность ствола скважины и прикладывает боковое усилие к внутренней поверхности ствола скважины. Противодействие боковому усилию, приложенному к активному стабилизатору 141 и валу 107 долота, закрепленному с активным стабилизатором 141, толкает утяжеленную бурильную трубу 105 через соединение 108 для отклонения с созданием бокового смещения, что заставляет гибридную роторную управляемую систему 100 действовать в качестве системы с отклонением долота. В то же время боковое смещение утяжеленной бурильной трубы 105 в месте соединения 108 создает угол наклона между утяжеленной бурильной трубой 105 и валом 107 долота, что заставляет гибридную роторную управляемую систему действовать в качестве системы с направлением долота.
[30] На фиг. 7 проиллюстрировано состояние гибридной роторной управляемой системы 100 при ее направлении для изменения направления бурения при бурении скважины 200. Как проиллюстрировано на фиг. 7, гибридная роторная управляемая система 100 дополнительно содержит один или более закрепленных стабилизаторов (показан только закрепленный стабилизатор 151, ближайший к активному стабилизатору 141), закрепленных на утяжеленной бурильной трубе 105. Когда гибридная роторная управляемая система 100 направляется для изменения направления бурения, двигатели 121 и 123 (показанные на фиг. 1) и активный стабилизатор 141 совместно приводят в движение вал 107 долота, буровое долото 103, закрепленное на валу 107 долота, и секцию153 утяжеленной бурильной колонны 105, которая находится между соединением 108 и закрепленными стабилизаторами 151, расположенными ближе всего к активному стабилизатору 141, чтобы постепенно отклоняться для создания отклоняющегося угла β между осью вращения секции 153 утяжеленной бурильной трубы и осью скважины 200 рядом с закрепленными стабилизаторами 151. Двигатели 121 и 123 и активный стабилизатор 141 также совместно приводят в движение вал 107 долота с возможностью наклона вокруг соединения 108 относительно секции 153 утяжеленной бурильной трубы под углом α наклона между осью вращения вала 107 долота (которая также является осью вращения бурового долота 103) и осью вращения секции 153 утяжеленной бурильной трубы.
[31] Двойной эффект создает угол γ между осью вращения бурового долота 103 и осью скважины 200 вблизи закрепленных стабилизаторов 151, приблизительно равный сумме α и β, то есть γ ≈ α + β. Можно видеть, что угол между осью вращения бурового долота 103 и осью скважины 200 вблизи закрепленных стабилизаторов 151 значительно увеличивается по сравнению с системой с направлением долота или с отклонением долота в соответствии с предшествующим уровнем техники, а это означает, что темп набора кривизны значительно увеличивается. Кроме того, благодаря активному стабилизатору и стабильному управлению траектория бурения может быть более плавной и может быть повышено качество скважины.
[32] Гибридная роторная управляемая система, описанная выше в данном документе, направляется гибридным способом, включающим режимы управления направлением с направлением долота и с отклонением долота. Объединенные функции с направлением долота и с отклонением долота могут повысить темп набора кривизны, когда вал 107 долота толкается для создания поперечного смещения и угла наклона бурового долота 103 в одном и том же направлении с помощью активного стабилизатора 141 и двух эксцентриковых колес 125 и 127.
[33] Хотя данное изобретение описано со ссылкой на предпочтительный вариант реализации изобретения, специалистам в данной области техники должно быть понятно, что могут быть сделаны различные изменения и его элементы могут быть заменены эквивалентами без отклонения от объема изобретения. Кроме того, может быть сделано много модификаций для приспособления конкретной ситуации или материала к идеям изобретения без отклонения от его существенного объема. Следовательно, предполагается, что данное изобретение не ограничивается конкретным вариантом реализации изобретения, раскрытым в качестве наиболее эффективного режима, предполагаемого для реализации данного изобретения, но что изобретение будет включать в себя все варианты реализации изобретения, попадающие в объем прилагаемой формулы изобретения.
Реферат
Роторная управляемая буровая система для бурения ствола скважины содержит утяжеленную бурильную трубу, буровое долото, вал долота, соединяющий буровое долото с утяжеленной бурильной трубой, причем вал долота соединен с утяжеленной бурильной трубой посредством соединения, выполненного с возможностью передавать крутящий момент от утяжеленной бурильной трубы на вал долота, и может поворачиваться относительно утяжеленной бурильной трубы вокруг соединения, первое эксцентриковое колесо и второе эксцентриковое колесо, соединенные с валом долота и вращающиеся для поворота вала долота относительно утяжеленной бурильной трубы вокруг соединения, контроллер для управления первым и вторым эксцентриковыми колесами для согласованного вращения, так что поворот вала долота относительно утяжеленной бурильной трубы, по существу, компенсирует вращение утяжеленной бурильной трубы, и активный стабилизатор, установленный на валу долота и выполненный с возможностью отклонения вала долота для создания бокового смещения и угла наклона бурового долота, чтобы изменять направление бурения. Обеспечивается увеличение темпа набора кривизны, повышение плавности и качества скважины. 2 н. и 11 з.п. ф-лы, 7 ил.
Комментарии