Система прогнозирования для привода - RU2600200C2
Код документа: RU2600200C2
Чертежи









Описание
ДАННЫЕ РОДСТВЕННОЙ ЗАЯВКИ
[0001] Данная заявка заявляет приоритет по предварительной заявке США № 61/636,431, зарегистрированной 20 апреля 2012 г., содержание которой в его полном объеме включено в данный документ посредством ссылки.
УРОВЕНЬ ТЕХНИКИ
[0002] Настоящее изобретение относится к системе и способу для прогнозирования состояния цилиндра. Более конкретно, изобретение относится к системе и способу, который использует давление или другой параметр для определения состояния пневматического или гидравлического цилиндра.
[0003] Пневматические и гидравлические цилиндры широко используются в промышленности для приведения в действие оборудования в производственных линиях и для обеспечения движущей силы для различных элементов. Со временем работа этих цилиндров может ухудшаться. Однако зачастую ухудшение в рабочих характеристиках не обнаруживают до тех пор, пока не произойдет окончательный отказ цилиндра. Если пользователь не подготовлен к упомянутому отказу, то он может приводить к значительному времени простоя или затратам.
КРАТКАЯ СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В одном варианте осуществления изобретение предусматривает систему, которая использует один или несколько датчиков давления для осуществления контроля состояния цилиндра. Упомянутая система включает в себя микропроцессор/контроллер, который сравнивает измеренные данные давления с известными базовыми данными для конкретного цилиндра, выполняющего известную функцию, чтобы определять, является ли работа приемлемой. Упомянутая система может быть самостоятельной или может представлять собой часть распределенной системы управления. В некоторых исполнениях упомянутая система может включать в себя датчики положения, которые регистрируют реальное положение поршня в цилиндре.
[0005] В другом исполнении изобретение предусматривает систему привода, которая включает в себя конструкцию поршень-цилиндр, включающую в себя поршень, который выполнен с возможностью перемещения относительно цилиндра. Первый проточный канал сообщается по текучей среде с упомянутой конструкцией поршень-цилиндр, и второй проточный канал сообщается по текучей среде с упомянутой конструкцией поршень-цилиндр. Система управления выполнена с возможностью соединения по текучей среде первого проточного канала с источником текучей среды высокого давления и для соединения упомянутого второго проточного канала со сливом для перемещения поршня в первом направлении. Датчик давления соединен по текучей среде с первым проточным каналом и выполнен с возможностью измерения достаточных данных о давлении во время перемещения поршня для формирования кривой зависимости давления от времени. Система управления выполнена с возможностью сравнения сформированной кривой зависимости давления от времени с известной стандартной кривой зависимости давления от времени, хранимой в системе управления, для определения состояния конструкции поршень-цилиндр.
[0006] В другом исполнении изобретение предусматривает систему привода, которая включает в себя цилиндр, определяющий внутреннее пространство и включающий в себя первое отверстие для текучей среды, расположенное рядом с первым концом пространства, и второе отверстие для текучей среды рядом с вторым концом пространства. Поршень расположен в пределах внутреннего пространства и выполнен с возможностью разделения пространства на первую сторону и вторую сторону, при этом первая сторона сообщается по текучей среде с первым отверстием для текучей среды, а вторая сторона сообщается по текучей среде со вторым отверстием для текучей среды. Исполнительный элемент соединен с поршнем и выполнен с возможностью выполнения работы в ответ на перемещение поршня, при этом система управления выполнена с возможностью селективного соединения по текучей среде упомянутого первого отверстия для текучей среды с одним из упомянутого источника давления и упомянутым сливом и для соединения второго отверстия для текучей среды с другим из упомянутого слива и упомянутого источника давления, чтобы селективно перемещать поршень от упомянутого первого отверстия и к упомянутому первому отверстию. Датчик давления сообщается по текучей среде с первой стороной и выполнен с возможностью измерения данных о давлении во время перемещения поршня. Система управления выполнена с возможностью сравнения измеренных данных давления с известным стандартом для определения состояния системы.
[0007] В другом исполнении изобретение предусматривает способ прогнозирования повреждения в системе привода. Упомянутый способ включает впуск текучей среды высокого давления в первую сторону конструкции поршень-цилиндр, выпуск текучей среды низкого давления из второй стороны конструкции поршень-цилиндр, чтобы позволять поршню перемещаться относительно цилиндра к упомянутой второй стороне, и проведение множества измерений давления текучей среды рядом с упомянутой первой стороной во время перемещения поршня. Упомянутый способ также включает сравнение множества измерений давления с известным набором величин давления и определение вероятно ли повреждение на основе упомянутого сравнения множества измерений давления с упомянутым известным набором величин давления.
[0008] Другие аспекты изобретения станут понятными при изучении подробного описания и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Фиг. 1 представляет собой схематичное изображение одного возможного варианта осуществления настоящего изобретения;
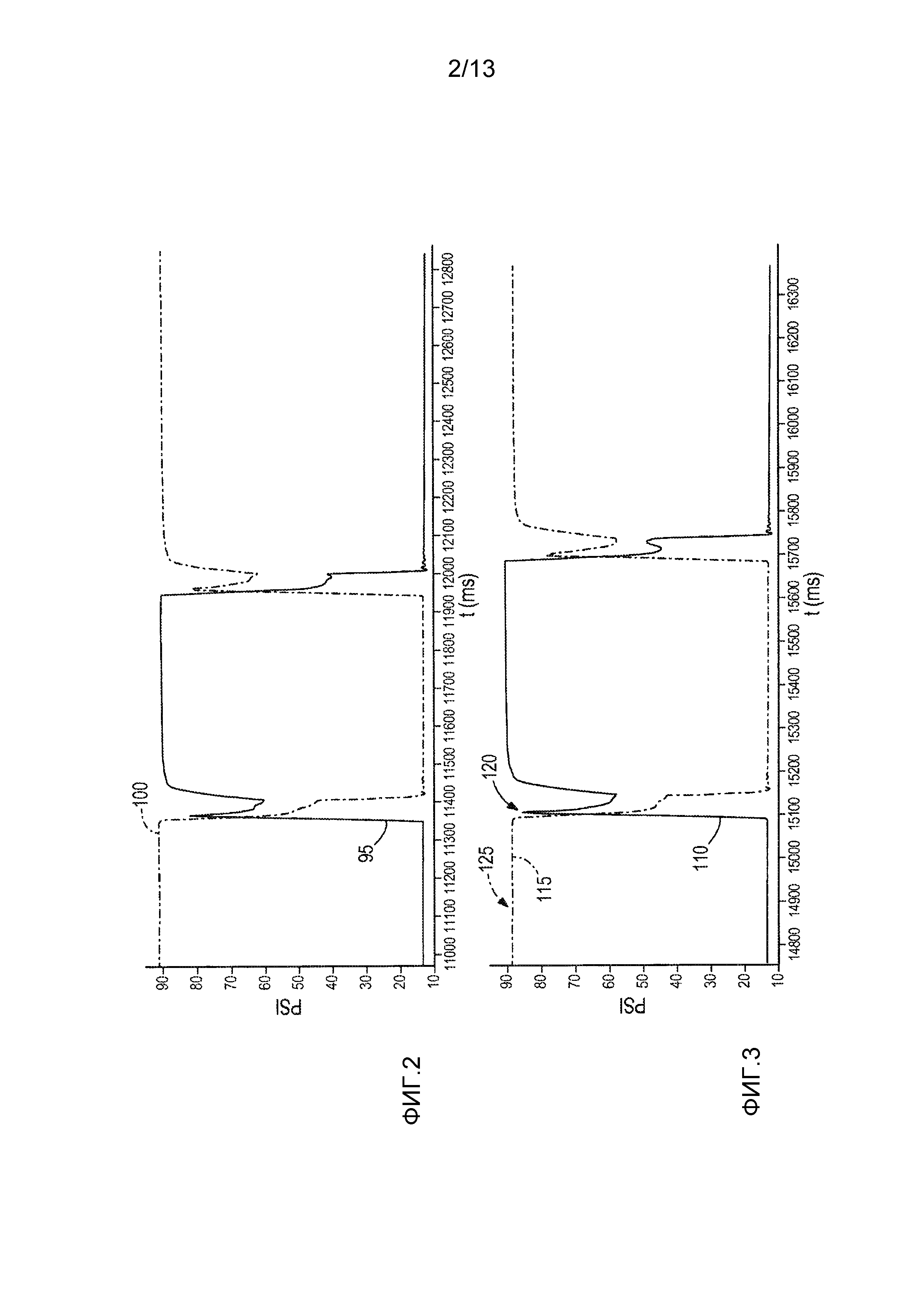
[0010] Фиг. 2 представляет собой график, показывающий зависимость измеренных величин давления от времени для нового привода в горизонтальном положении при отсутствии нагрузки и без демпфирования;
[0011] Фиг. 3 представляет собой график, показывающий зависимость измеренных величин давления от времени для привода в такой же конструкции, как на фиг. 2, при этом известно, что привод поврежден;
[0012] Фиг. 4 представляет собой график, показывающий зависимость измеренных величин давления от времени для нового привода в горизонтальном положении при отсутствии нагрузки, но с демпфированием;
[0013] Фиг. 5 представляет собой график, показывающий зависимость измеренных величин давления от времени для привода в такой же конструкции, как показанная на фиг. 4, при этом известно, что привод поврежден;
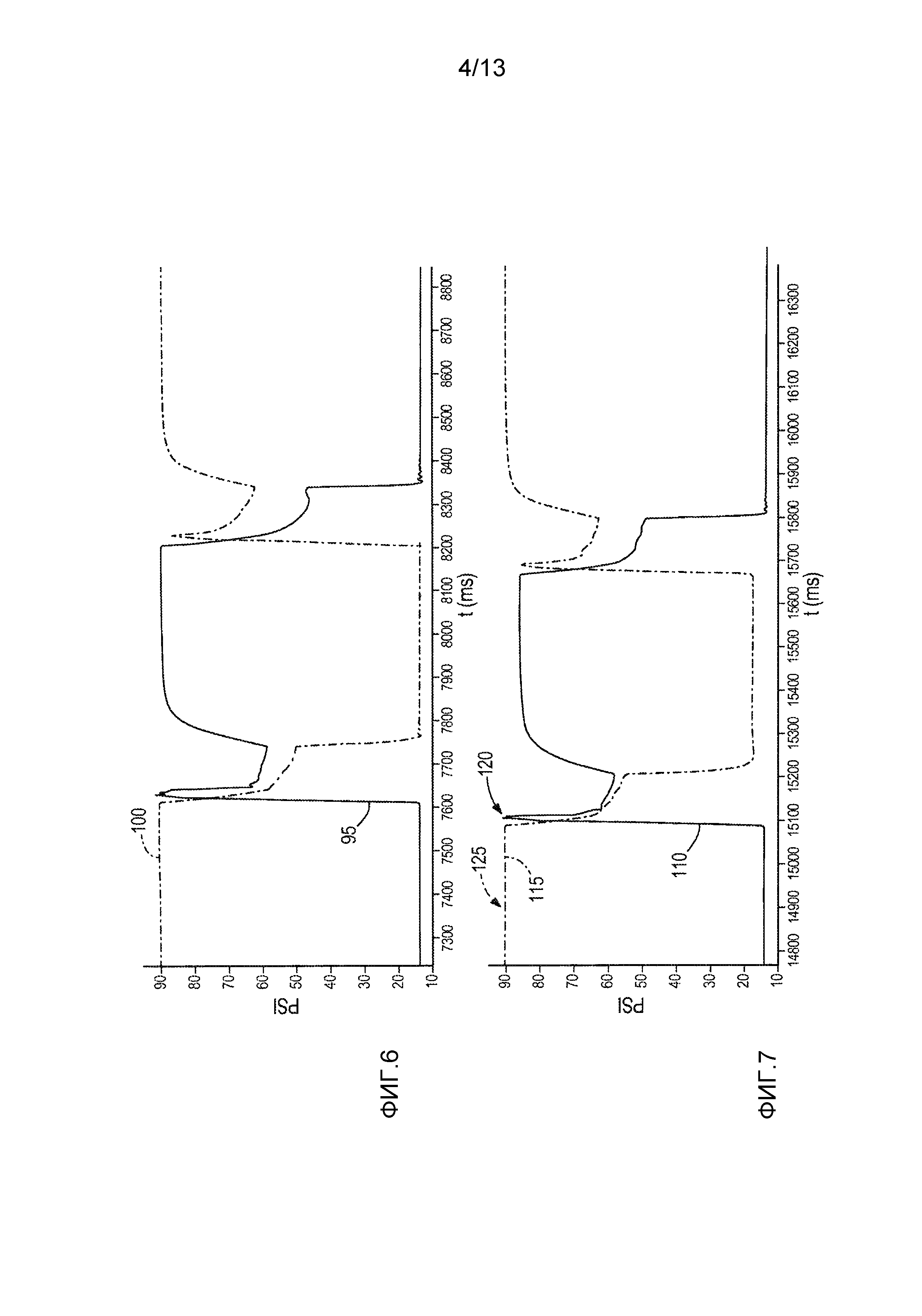
[0014] Фиг. 6 представляет собой график, показывающий зависимость измеренных величин давления от времени для нового привода, который имеет больший диаметр по сравнению с приводом, показанным фиг. 2-5, установленного в горизонтальном положении при отсутствии нагрузки, но с демпфированием;
[0015] Фиг. 7 представляет собой график, показывающий зависимость измеренных величин давления от времени для привода в такой же конструкции, как показанная на фиг. 6, при этом известно, что привод поврежден;
[0016] Фиг. 8 представляет собой график, показывающий зависимость измеренных величин давления от времени для нового привода в вертикальном положении при наличии нагрузки и с демпфированием;
[0017] Фиг. 9 представляет собой график, показывающий зависимость измеренных величин давления от времени для привода в такой же конструкции, как показанная на фиг. 8, при этом известно, что привод поврежден;
[0018] Фиг. 10 представляет собой схематичное изображение конструкции в соответствии с фиг. 1 и дополнительно включающей в себя систему измерения положения;
[0019] Фиг. 11 представляет собой схематичное изображение системы с несколькими приводами, включающей в себя распределенную систему управления;
[0020] Фиг. 12 представляет собой изображение на экране системы контроля для использования при осуществлении контроля рабочих характеристик и состояния одного или нескольких приводов;
[0021] Фиг. 13 представляет собой другое изображение на экране системы контроля в соответствии с фиг. 12 для использования при осуществлении контроля рабочих характеристик и состояния одного или нескольких приводов;
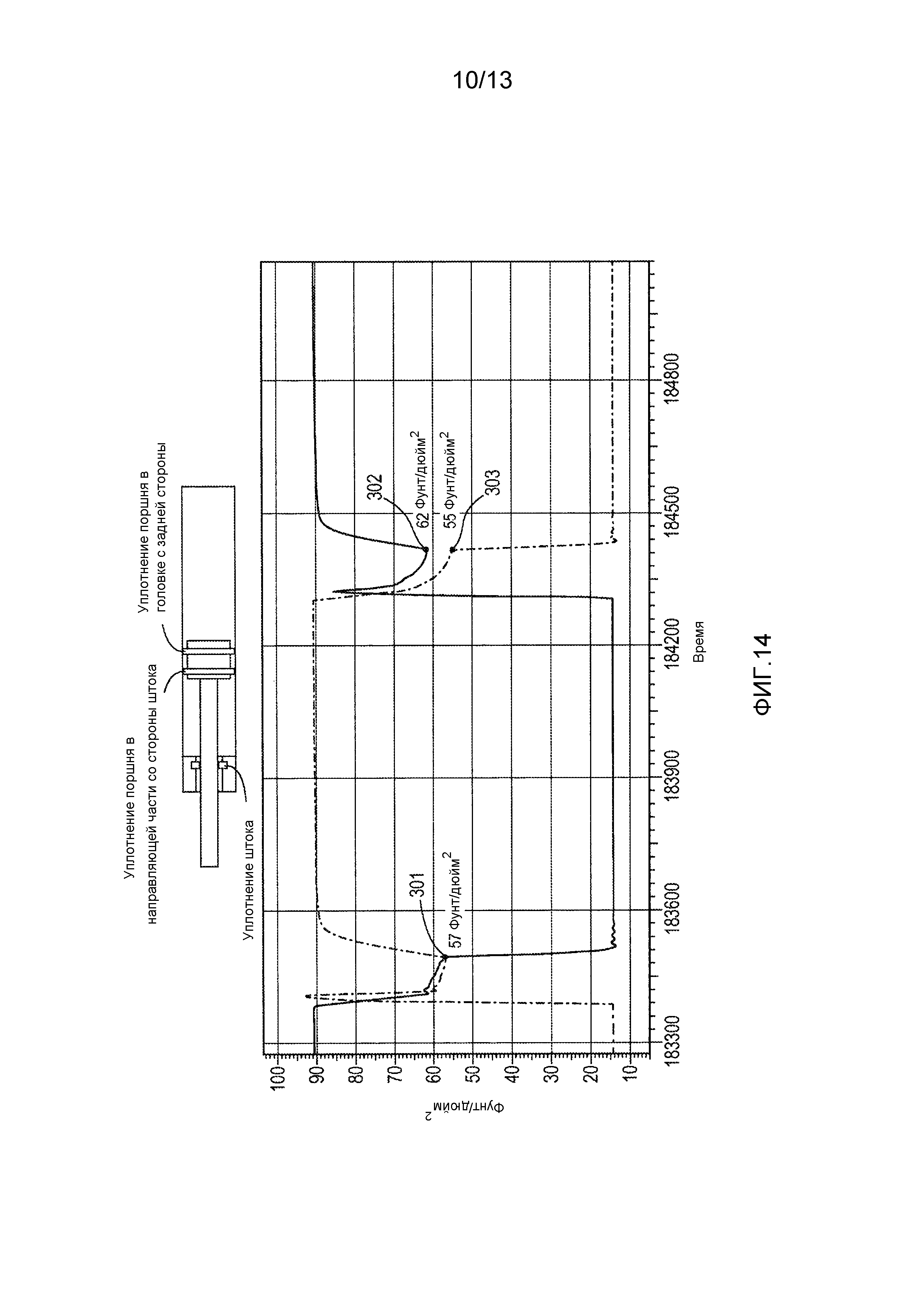
[0022] Фиг. 14 представляет собой изображение базовых результатов испытаний для известного привода;
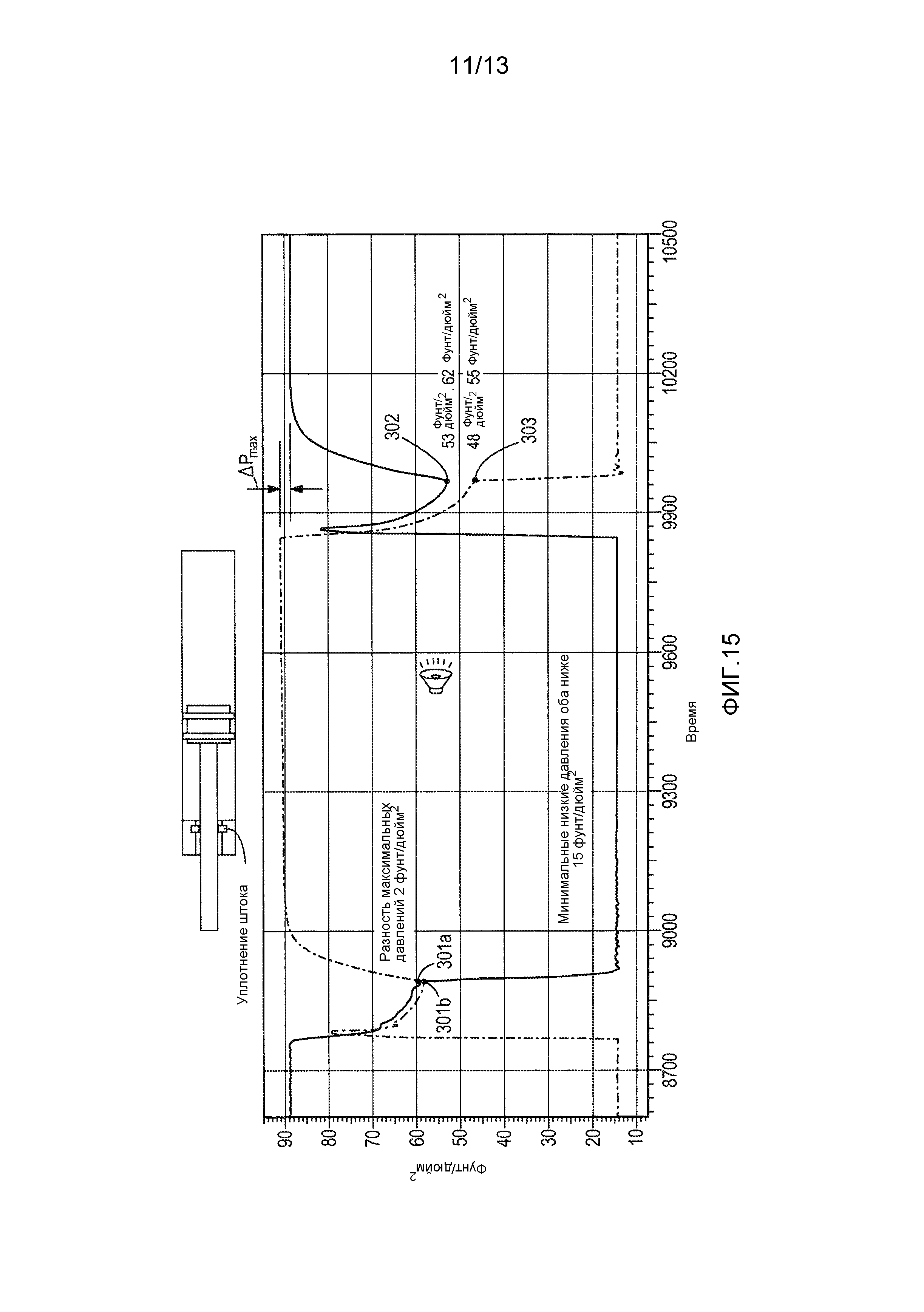
[0023] Фиг. 15 представляет собой изображение результатов испытаний для известного привода в соответствии с фиг. 14 с поврежденным уплотнением вала или штока;
[0024] Фиг. 16 представляет собой изображение результатов испытаний для известного привода в соответствии с фиг. 14 с поврежденным уплотнением поршня на стороне штока; и
[0025] Фиг. 17 представляет собой изображение результатов испытаний для известного привода в соответствии с фиг. 14 с поврежденным уплотнением поршня в головке с задней стороны (противоположной штоку).
ПОДРОБНОЕ ОПИСАНИЕ
[0026] Прежде чем варианты осуществления изобретения будут описаны подробно, необходимо понимать, что изобретение не ограничено в своем применении деталями конструкции и расположением элементов, изложенными в приведенном ниже описании или показанными в прилагаемых чертежах. Изобретение может иметь другие варианты осуществления и может быть реализовано или осуществлено разными способами.
[0027] На фиг. 1 показана система 10, которая приспособлена для использования в прогнозировании или оценке состояния привода 15 (например, пневматического, гидравлического и др.) или клапана. Система 10 включает в себя цилиндр 17, первый датчик 20 давления, второй датчик 25 давления и микропроцессор 30. Показанный привод 15 представляет собой обычный привод 15 двойного действия, содержащий отверстие 35 в каждом конце цилиндра 17, поршень 40, расположенный между отверстиями 35, и шток 45, продолжающийся из поршня 40 и за пределами одного конца цилиндра 17. Поршень 40 разделяет цилиндр 17 на первую камеру 50 и вторую камеру 55. Каждая из камер 50, 55 предусматривает изменяемый объем, который обеспечивает перемещение поршня 40. Как будет понятно для специалиста в данной области техники, система 10, описанная в данном документе, может быть применена в приводах разных типов (например, бесштоковых) и может быть использована с приводами, приводимыми в действие разными рабочими текучими средами (например, гидравлической текучей средой, маслами, водой, топливом, воздухом, другими газами, другими жидкостями и др.). Кроме того, хотя показанный привод не смещен в каком-либо направлении, данная система может быть также использована в приводах с пружинным возвратом. В сущности реальная конструкция привода или клапана не имеет большого значения, поскольку изобретение может быть приспособлено к многим конструкциям.
[0028] Рабочую текучую среду впускают в одно отверстие 35 и позволяют вытекать или выходить из другого отверстия 35, чтобы удалять поршень 40 и шток 45 от отверстия 35, в которое впускают текучую среду. Поскольку во время перемещения поршня 40 существует большая разность давлений, между поршнем 40 и цилиндром 17 предусмотрено уплотнение 60. По истечении некоторого периода использования, данное уплотнение 60 может изнашиваться или как-то иначе разрушаться, образуя одну точку, где может возникнуть повреждение. Второе уплотнение 65 предусмотрено на конце цилиндра 17, через который проходит шток 45. Это второе уплотнение 65 уменьшает количество рабочей текучей среды, которая утекает в отверстии для штока. Во время использования, данное уплотнение 65 может изнашиваться или как-то иначе разрушаться, образуя вторую точку возможного повреждения.
[0029] Обычно один или несколько клапанов 70 используют для направления рабочей текучей среды к и от отверстий 35 по мере необходимости, чтобы обеспечить требуемое перемещение. В предпочтительной конструкции, трехходовой клапан 70 в первом положении позволяет первому отверстию быть открытым 35 для источника 75 давления и второму отверстию быть открытым 35 для слива 80. Во втором положении, отверстия 35 меняют местами так, что первое отверстие 35 является открытым для слива 80, а второе отверстие 35 является открытым для источника 75 давления. Упомянутое первое положение и упомянутое второе положение обеспечивают перемещение поршня 40 и штока 45 в противоположных направлениях. Клапан 70 также предусматривает третье рабочее положение, в котором оба отверстия 35 закрыты, тем самым запирая рабочую текучую среду на обеих сторонах поршня 40. Упомянутое третье положение позволяет размещать и удерживать поршень 40 и шток 45 в некоторой промежуточной точке между двумя крайними положениями. Кроме того, клапаны регулирования расхода или других устройства управления потоком могут быть использованы для управления скоростью потока текучей среды в или из отверстий 35, чтобы управлять скоростью, ускорением и точным положением поршня 40 и штока 45, когда он перемещается.
[0030] С продолжающейся ссылкой на фиг. 1, для измерения давления в первой камере 50 предусмотрен первый датчик 20 давления, а для измерения давления во второй камере 55 предусмотрен второй датчик 25 давления. В показанной конструкции, первый датчик 20 расположен в отверстии 85 для первого датчика, которое расположено на расстоянии от отверстия 35 для текучей среды, уже предусмотренного в первой камере 50 цилиндра 17. Аналогично, второй датчик 25 расположен в отверстии 90 для второго датчика, которое расположено на расстоянии от отверстия 35 для текучей среды, уже предусмотренного во второй камере 55 цилиндра 17. В других конструкциях, датчик 25 давления может быть встроен в трубопроводы для текучей среды, которые соединяют цилиндр 17 с клапаном 70, или может быть подсоединен к отводной трубе, которая продолжается из подводящего трубопровода или камер 50, 55 цилиндра, по мере необходимости.
[0031] Датчики 20, 25 давления, предпочтительно, имеют диапазон воспринимаемых давлений, который превышает 150 фунт/дюйм2, с точностью примерно 0,01 фунт/дюйм2, при этом возможны также более или менее точные датчики. Возможны, конечно, и датчики, работающие при давлении 250 фунт/дюйм2 или выше. Кроме того, датчик 20, 25, предпочтительно, обеспечивает время реагирования, которое обеспечивает сбор данных со скоростью примерно 1000 измерительных точек в секунду. При желании, конечно, могут быть использованы другие датчики давления. Например, в одном исполнении, используются датчики давления звука, акустические датчики или другие датчики вибраций для измерения требуемых рабочих характеристик привода 15.
[0032] В предпочтительных исполнениях, датчики 20, 25 давления разъемно соединены с приводом 15 с возможностью повторного использования с последующими приводами 15. В качестве альтернативы, датчики 20, 25 давления могут быть изготовлены как часть привода 15 и заменяются вместе с приводом 15.
[0033] Датчики 20, 25 давления преобразуют измеренные давления в соответствующих им камерах в сигнал давления, который передается в микропроцессор/контроллер 30. В предпочтительных исполнениях, микропроцессор/контроллер 30 выполнен с возможностью приема данных, потоковой передачи данных и/или проведения анализа на повреждение или контрольные величины. Кроме того, может быть предусмотрена функция регистрации данных для фиксирования количества рабочих циклов, минимальных и максимальных температур, максимальных давлений и др. Каждый микропроцессор/контроллер 30 может включать в себя уникальный идентификатор (ID). В исполнении, показанном на фиг. 1, показано проводное соединение. При этом также возможны беспроводные соединения, такие как инфракрасное, радиочастотное и др. Микропроцессор/контроллер 30 принимает сигналы давления и сравнивает данные сигналы с известными сигналами для приводов 15 для принятия решений относительно эксплуатационных характеристик и состояния привода 15, к которому он подсоединен. Микропроцессор/контроллер 30 может включать в себя индикаторы, такие как лампочки или звуковые устройства, которые могут быть приведены в действие, когда обнаружено конкретное состояние. Например, красная лампочка может быть предусмотрена и зажжена тогда, когда обнаружен чрезмерный износ или повреждение привода 15. Микропроцессор/контроллер 30 может содержать дополнительные вводимые данные (например, температуру окружающей среды, давление, сигналы управления и др.) и содержит множество дополнительных средств вывода (например, Ethernet, RS-485/422, RS-232, USB, RF, IR, код мигания светодиодов и др.). Как отмечается, микропроцессор/контроллер 30 может осуществлять необходимые сравнения и принимать решения относительно работы, технического обслуживания или состояния привода 15 или может передавать необработанные данные или информацию для принятия решения в центральный компьютер, который затем отображает упомянутую информацию по одному или нескольким приводам 15 для пользователя. Кроме того, микропроцессор/контроллер может осуществлять функции регистрации данных и хранить данные, связанные с практически любым измеренным параметром, например, помимо прочих, количество циклов, максимальные и минимальные давления или температуры, количество повреждений и др.
[0034] Во время работы, данная система 10 может быть применена к практически любому приводу 15, выполняющему любую операцию. Однако, как будет понятно для специалиста в данной области техники, эксплуатационные характеристики любого данного привода 15 будут изменяться в зависимости от приложенной нагрузки, размещения привода 15 и нагрузки, размера привода 15, расстояния от источника 75 давления и любого количества других переменных. По существу, предпочтительным подходом является измерение эксплуатационных характеристик известного привода 15 в конкретном применении и использование таких измеренных данных в качестве базовой линии. Упомянутая базовая линия характеризует приемлемый профиль перемещения и сравнивается с измеренными профилями посредством микропроцессора/контроллера 30. Затем данное сравнение используют для определения состояния повреждения и оповещения.
[0035] На фиг. 2 показан пример одного такого базового измерения, которое является примерным и включает в себя давление, измеренное и показанное в виде графика в зависимости от времени. Как можно видеть, давление изменяется в пределах примерно от 10 фунт/дюйм2 до 95 фунт/дюйм2, при этом возможны другие диапазоны давления. Кроме того, полный ход поршня 40 в первом направлении занимает примерно 100 мс, при этом возможны более быстрые или более медленные ходы. Кроме того, ход в одном направлении может быть быстрее, чем ход в противоположном направлении, вследствие уменьшенной площади поршня, обусловленной штоком 45.
[0036] С продолжающейся ссылкой на фиг. 2, имеются две кривые 95, 100, при этом каждая кривая 95, 100 показывает данные, полученные от одного из датчиков 20, 25 давления. Первый датчик 20 давления измеряет давление немного больше 10 фунт/дюйм2 и, следовательно, соединен со сливом 80. Второй датчик 25 давления измеряет давление немного выше 90 фунт/дюйм2 и соединен с источником 75 высокого давления. Таким образом, поршень 40 смещен к предельному концу, ближайшему к первому датчику 20 давления. Вначале клапан 70 управления перемещают во второе положение, так что первая камера 50 и соответственно первый датчик 20 давления подвергаются воздействию текучей среды 75 высокого давления, а вторая камера 55 и соответственно второй датчик 25 давления открыты для слива 80. Давление во второй камере 55 сразу начинает падать в соответствии с по существу экспоненциальной кривой. В то же самое время давление в первой камере 50 повышается по существу по линейному закону до уровня первого давления. При достижении уровня первого давления, усилие, оказываемое на поршень 40 текучей средой высокого давления, преодолевает механическую инерцию поршня и некоторое трение залипания, и поршень 40 начинает перемещаться к второму датчику 25 давления. Перемещение поршня 40 увеличивает объем первой камеры 50, тем самым вызывая падение давления до уровня ниже первого давления. В то же самое время объем второй камеры 55 уменьшается, и давление падает до более низкого уровня в ускоренном темпе. Как только поршень 40 достигает своего конца хода, давление в первой камере 50 увеличивается до уровня, примерно равного давлению источника 75 высокого давления, а давление во второй камере 55 падает до уровня, примерно равного давлению 80 в сливе.
[0037] Как показано на фиг. 2, перемещение в обратном направлении дает аналогичные кривые с несколько другими величинами давления и длительностями. Отличия в давлениях и длительностях обусловлены преимущественно несимметричной конфигурацией камер 50, 55. Например, первое давление, требующееся для преодоления инерции и трения залипания, в одном направлении ниже в соответствии с фиг. 2, поскольку площадь поршня немного больше вследствие отсутствия штока 45 на стороне второй камеры поршня 40. Суммарное усилие на поршень 40 примерно одинаковое в обоих направлениях. Конечно, если приложить нагрузку, то данные соотношения и величины изменятся на основе, по меньшей мере частично, данной нагрузки.
[0038] На фиг. 3 показан такой же привод 15, выполняющий такую же операцию, как и привод 15, показанный на фиг. 2. Однако известно, что привод 15, показанный на фиг. 3, поврежден. Сравнение кривых 110, 115, показанных на фиг. 3, которые соответствуют кривым 95, 100, показанным на фиг. 2, показывает некоторые отличия. Например, величина 120 первого давления, требующегося для инициирования перемещения поршня 40, значительно выше на фиг. 3, чем на фиг. 2. Кроме того, как только начинается перемещение поршня, давление в первой камере 50 падает более значительно, чем в приводе 15, показанном на фиг. 2. Таким образом, изменение давления в первой камере 50 во время перемещения поршня больше в поврежденном приводе 15, показанном на фиг. 3, чем в исправном приводе 15, показанном на фиг. 2.
[0039] На фиг. 2 и фиг. 3 кривые, показывающие данные, измеренные противоположным датчиком давления, также отличаются. Например, величина 125 высокого давления, которое поддерживается до перемещения клапана 70, меньше на фиг. 3, чем на фиг. 2. Кроме того, при открытии для слива, давление во второй камере 55 падает быстрее в цилиндре, показанном на фиг. 3, чем в цилиндре, показанном на фиг. 2.
[0040] Различия между двумя кривыми 110, 115 могут также характеризовать возможные проблемы с цилиндром. Например, на разность между максимальным давлением во второй камере 55 до переключения клапана 70 и первым давлением, требующимся для инициирования перемещения 120 поршня 40, на фиг. 2 и фиг. 3 существенно отличается. Кроме того, разность давлений между двумя камерами 50, 55 во время перемещения поршня 40 и в конце хода поршня значительно меньше для привода 15, показанного на фиг. 3, по сравнению с приводом, показанным на фиг. 2.
[0041] Как отмечается, нагрузка и расположение привода 15, наряду с множеством других факторов, оказывает значительное влияние на данные о давлении, собираемые посредством датчиков 20, 25 давления. На фиг. 4 и 5 показаны приводы 15, аналогичные приводам 15, показанным на фиг. 2 и 3, соответственно, но с добавлением демпфирования для замедления перемещения поршня 40. И опять существуют различия в кривых, которые могут быть определены и которые могут быть использованы для оценки состояния приводов 15; однако данные кривые в значительной степени отличаются от кривых, показанных на фиг. 2 и 3.
[0042] На фиг. 6 и 7 показан такой же привод 15 во время горизонтальной работы при отсутствии нагрузки и без демпфирования. Привод 15 имеет больший диаметр по сравнению с приводом 15, использованным для получения кривых, показанных на фиг. 2-5. На фиг. 6 показаны данные от нового привода 15, а на фиг. 7 показаны данные от привода, который, как известно, является поврежденным.
[0043] На фиг. 8 и 9 показан вертикально установленный привод 15 при наличии нагрузки и с демпфированием. На фиг. 8 показаны данные от нового привода 15, а на фиг. 9 показаны данные от привода, который, как известно, является поврежденным.
[0044] Помимо измерения давления в первой камере 50 и второй камере 55, система 10 выполнена с возможностью измерения общей временной продолжительности хода и подсчитывания общего количества циклов или ходов поршня 40. Обе эти величины могут быть использованы для задач цикла технического обслуживания или оценки состояния привода 15. Например, микропроцессор/контроллер 30 может приводить в действие цветную лампочку, чтобы показать, что осуществлено заданное количество циклов и необходимо выполнять плановое техническое обслуживание или заменять привод 15. Система 10 способна также измерять и контролировать максимальные рабочие давления и выдавать сигнал тревоги, если одно или несколько из упомянутых рабочих давлений превышено.
[0045] Контроль других параметров может осуществляться с использованием первого датчика 20 и второго датчика 25 или для контроля других параметров могут быть предусмотрены дополнительные датчики. Например, датчик температуры может быть соединен с приводом 15 для осуществления контроля температуры рабочей текучей среды, температуры металла цилиндра или любой другой требуемой температуры. Данные о температуре могут быть использованы для компенсации влияний температуры на рабочее давление.
[0046] Помимо вышеописанных функций контроля, система 10 может быть также использована для более непосредственного управления работой привода 15. Например, микропроцессор/контроллер 30 может выдавать сигналы управления в клапан 70 или клапаны, управляющие течением текучей среды в привод 15, для управления скоростью, с которой перемещается поршень 40, или суммарным усилием, создаваемым посредством поршня 40. Кроме того, данная система 10 выполнена с возможностью обнаружения конца хода и остановки поршня 40 в данной точке или перед данной точкой, при желании.
[0047] Другое исполнение системы 150 включает в себя систему 155 измерения положения, которая выполнена с возможностью определения реального положения поршня 40 в цилиндре 17. Цилиндр 17, схематично показанный на фиг. 10, такой же, как цилиндр, показанный на фиг. 1, но включает в себя систему 155 измерения положения. Система 155 измерения положения включает в себя множество магнитных датчиков 160, разнесенные вдоль длины цилиндра 17. Каждый датчик 160 выполнен с возможностью точного измерения угла 165 между ним и другим магнитом 170, таким как магнит 170, расположенный внутри или соединенный с поршнем 40. Сигнал, характеризующий угол 165, передается из каждого датчика 160 в микропроцессор/контроллер 30. Микропроцессор/контроллер 30 использует различные углы для триангуляции и вычисления точного положения поршня 40. Затем эти данные о положении могут быть использованы для управления клапанами 70, чтобы точно управлять положением поршня в любой момент времени. Данная информация о положении может быть также использована независимо или в дополнение к другим датчикам в целях управления и/или контроля.
[0048] Системы 10, 150, описанные в данном документе, могут быть использованы автономно для контроля и управления работой одного привода 15. Упомянутая система способна сообщать, когда состояние привода 15 значительно изменяется, способна сообщать, когда требуется техническое обслуживание, и способна сообщать, когда требуется замена привода 15 или уплотнения. Кроме того, упомянутая система может быть использована для управления работой отдельного привода 15.
[0049] С другой конструкции, несколько микропроцессоров/контроллеров 30 обмениваются информацией с центральным компьютером 170, как показано на фиг. 11. Центральный компьютер 170 является частью распределенной системы управления (distributed control system - DCS), которая способна контролировать и управлять отдельными приводами 15 из одного пункта, при необходимости.
[0050] На фиг. 14-17 показаны результаты эксплуатационных испытаний известных приводов в исправном состоянии и такого же привода с тремя разными известными повреждениями. На фиг. 14-17 показан один возможный способ использования данной системы. Другие типы приводов могут иметь другие виды повреждений и соответственно могут требовать несколько другого анализа. Кроме того, абсолютные давления, периоды времени и циклы, раскрытые в данном документе, являются примерными и могут изменяться в зависимости от многих факторов, включающих применение или используемый привод. А фиг. 14-17 представляют собой пример одного возможного использования упомянутой системы.
[0051] На фиг. 14 показано базовое измерение известного привода, который, как известно, находится в исправном или приемлемом состоянии. Упомянутый привод содержит уплотнение вала или штока, уплотнение поршня на стороне штока и уплотнение поршня в головке, расположенное на противоположной стороне поршня относительно уплотнения на стороне штока. Любое из этих уплотнений может повреждаться во время использования привода, и система настоящего изобретения способна обнаружить данное повреждение, прежде чем привод станет непригодным для использования. Как можно видеть, упомянутая система генерирует формы волны (или кривые) на основе измерений давления, проводимых на обеих сторонах поршня. Как показано, определены три конкретные измерительные точки 301, 302 и 303. Эти три измерительные точки будут рассматриваться со ссылкой на фиг. 15-17, когда данные точки смещаются в результате конкретных повреждений. Кроме того, необходимо отметить, что максимальное давление на каждой стороне цилиндра по существу одинаковое. Это характерно для исправного цилиндра, но зависит от любого давления или регулятора потока, который может быть расположен выше по потоку от отверстий для текучей среды. Кроме того, низкое давление каждой формы волны примерно равно атмосферному давлению, что характерно для исправного привода.
[0052] На фиг. 15 показаны аналогичные формы волны для такого же привода, как привод, показанный на фиг. 14, но с известным повреждением. В частности, известно, что повреждено уплотнение штока. Как можно видеть, две формы волны больше не пересекаются в первой измерительной точке 301. Вернее, теперь существует разность, равная 2 фунт/дюйм2, между двумя точками 301а и 301b, и они сместились вверх от первоначальной величины, равной 57 фунт/дюйм2. Кроме того, вторая точка 302 сдвинулась вниз от 62 фунт/дюйм2 до 53 фунт/дюйм2, а третья точка 303 сдвинулась вниз от 55 фунт/дюйм2 до 48 фунт/дюйм2. Кроме того, максимальные давления двух форм волны стали разными в результате повреждения. Любое или все данные отличия могут быть использованы для определения не только того, что привод работает ненормально, но и того, что причиной ненормальной работы, по всей вероятности, является поврежденное уплотнение штока.
[0053] На фиг. 16 показаны аналогичные формы волны для такого же привода, как привод, показанный на фиг. 14, но с известным повреждением. В частности, известно, что повреждено уплотнение поршня на стороне штока. Как можно видеть, две формы волны теперь имеют много отличий. Например, первая точка 301 сдвинулась вверх примерно на 3 фунт/дюйм2. Кроме того, вторая точка 302 сдвинулась вниз от 62 фунт/дюйм2 до 55 фунт/дюйм2, а третья точка 303 сдвинулась вниз от 55 фунт/дюйм2 до 49 фунт/дюйм2. Эти изменения схожи с изменениями, описанными в отношении форм волны, показанных на фиг. 15. Но максимальное давление двух форм волны теперь имеет разницу примерно 3,5 фунт/дюйм2. Эта разница больше чем та, что является результатом поврежденного уплотнения штока. Кроме того, в отличие от поврежденного уплотнения штока, формы волны, показанные на фиг. 16 также показывают разность давлений между минимальными давлениями. Точнее явно видна разница, равная 1,5 фунт/дюйм2. Данной разницы не было в результате поврежденного уплотнения штока. Таким образом, упомянутые отличия могут быть использованы для определения не только того, что привод работает ненормально, но и того, что причиной ненормальной работы, по всей вероятности, является поврежденное уплотнение поршня на стороне штока.
[0054] На фиг. 17 показаны аналогичные формы волны для такого же привода, как привод, показанный на фиг. 14, но с известным повреждением. В частности, известно, что повреждено уплотнение поршня на стороне головки. Как можно видеть, две формы волны теперь имеют много отличий по сравнению с формами волны, показанными на фиг. 14, а также формами волны, показанными на фиг. 15 и 16. Например, первая точка 301 сдвинулась по сравнению с формами волны, показанными на фиг. 14. Это отличается от того, что показано на фиг. 15 и 16. Аналогично, вторая точка 302 и третья точка 303 остались по существу неизменными по сравнению с формами волны, показанными на фиг. 14. Таким образом, глядя только на эти три точки, можно сделать вывод, что привод, показанный на фиг. 17, находится в исправном состоянии. Однако максимальное давление двух форм волны теперь имеет разницу, которая больше 3 фунт/дюйм2. Эта разница близка по величине к той, что показана на фиг. 16, но направление является обратным (т.е. противоположный датчик выше).
[0055] Кроме того, подобно формам волны, показанным на фиг. 16, формы волны, показанные на фиг. 17 показывают разность давлений между минимальными давлениями. Точнее явно видна разница, равная примерно 2 фунт/дюйм2. Как и разность максимальных давлений, эта разница была в формах волны, показанных на фиг. 16, но опять же направление является обратным (т.е. противоположный датчик ниже). Таким образом, эти различия могут быть использованы для определения не только того, что привод работает ненормально, но и того, что причиной ненормальной работы, по всей вероятности, является поврежденное уплотнение поршня на стороне головки.
[0056] Необходимо отметить, что приводы, использованные для получения форм волны, показанных на фиг. 14-17, были ненагруженными. По существу было отмечено очень небольшое отклонение в длительностях цикла (ось Х) в результате повреждений. Однако в нагруженных цилиндрах вышеописанные повреждения также вызывают заметные отклонения в длительностях цикла. Эти отклонения могут быть измерены и сообщены и могут быть также использованы для оценки состояния привода. Помимо использования временных отклонений для определения наличия потенциальных проблем, некоторые исполнения используют площадь под кривой для оценки наличия проблем. Более конкретно, площадь между кривыми может быть использована в тех случаях, когда привод используется при изменяющихся давлениях или при изменяющихся скоростях. В таких случаях обнаружено, что общая площадь под кривой остается по существу неизменной. Таким образом, увеличение данной площади указывает на нежелательную утечку или другие нарушения в работе. В других применениях, изменения в площади между кривыми могут указывать на конкретный вид повреждения отдельно или в сочетании с другими измеренными параметрами.
[0057] Кроме того, начало и конец цикла могут быть легко зарегистрированы и сообщены для использования не только в управлении процессом, но и в оценке состояния привода. Кроме того, если определено, что продолжительность цикла меньше, чем требуется, или больше, чем требуется, то можно регулировать давление, чтобы обеспечить требуемую продолжительность цикла, тем самым повышая качество процесса и, возможно, уменьшая количество воздуха или сжатой текучей среды, используемой приводом.
[0058] На фиг. 12 и 13 показаны изображения одной возможной системы контроля для использования с системами, описанными в данном документе. На фиг. 12 показан лист состояния для упомянутой системы контроля. Хотя упомянутый лист состояния включает в себя состояние одного привода, при желании несколько приводов могут быть сгруппированы вместе и показаны. Показанное изображение включает в себя три индикатора эксплуатационных характеристик, при этом первый индикатор предусматривает красный, желтый и зеленый статус на основе вышеописанного анализа формы волны. Второй индикатор предусматривает индикацию того, что достигнут конец хода. Третий индикатор подсчитывает циклы привода и обеспечивает индикацию срока службы привода на основе количества циклов. Упомянутый срок службы может представлять собой реальный срок эксплуатации привода или может быть установлен так, чтобы отражать рекомендованную периодичность технического обслуживания для конкретного датчика.
[0059] Вторая область упомянутого листа состояния предусматривает цифровые данные для различных рабочих параметров привода. При необходимости могут быть измерены и отображены другие параметры. Третья область упомянутого листа состояния предусматривает анализ эффективности. В данном примере, эффективность определяется на основе продолжительности цикла. Отображаемые данные представляют собой результаты сравнения реальной продолжительности цикла с требуемой продолжительностью цикла, при этом предусмотрено пространство для обеспечения рекомендованного корректирующего воздействия на основе полученного результата. В данном примере, привод перемещается быстрее, чем требуется. Поэтому давление текучей среды может быть снижено, чтобы замедлить привод и потенциально уменьшить эксплуатационные расходы.
[0060] На фиг. 13 показана одна возможная конфигурация листа, которая предусматривает данные, специфические для проверяемого привода. В данном примере, размер отверстия, длина хода и общее количество циклов могут быть добавлены, сохранены и отображены. Кроме того, этапы, требующиеся для генерирования базовых форм волны (фиг. 14), могут быть инициированы с данного листа. Наконец, точки аварийной сигнализации для любых измеряемых параметров могут быть установлены так, что каждая имеет верхний предел тревоги, нижний предел тревоги и селектор для активации или деактивации тревоги. Наконец, предусмотрен статус обновления встроенного программного обеспечения для оповещения пользователя, когда необходимо обновить встроенное программное обеспечение.
[0061] Необходимо отметить, что изобретение описано как используемое с приводом (иногда называемым цилиндром, пневматическим цилиндром или гидравлическим цилиндром). Однако в других применениях настоящее изобретение применимо к клапану или любому другому потоковому устройству. Упомянутое потоковое устройство может представлять собой любое устройство, которое управляет потоком текучей среды или работает под действием потока текучей среды, направляемого в него. В этой связи изобретение не ограничено только приводами.
[0062] Таким образом, настоящее изобретение обеспечивает систему 10, 150 для измерения и управления работой привода 15. Система 10, 150 включает в себя датчики 20, 25 давления, которые способны собирать данные, и микропроцессор/контроллер 30, способный анализировать упомянутые данные для определения состояния привода 15.
Реферат
Система предназначена для прогнозирования состояния привода. Система привода включает в себя конструкцию поршень-цилиндр, включающую в себя поршень, который выполнен с возможностью перемещения относительно цилиндра. Первый проточный канал сообщается по текучей среде с упомянутой конструкцией поршень-цилиндр, и второй проточный канал сообщается по текучей среде с упомянутой конструкцией поршень-цилиндр. Система управления выполнена с возможностью соединения по текучей среде упомянутого первого проточного канала с источником текучей среды высокого давления и для соединения упомянутого второго проточного канала со сливом для перемещения поршня в первом направлении. Датчик давления соединен по текучей среде с первым проточным каналом и выполнен с возможностью измерения соответствующих данных о давлении во время перемещения поршня для формирования кривой зависимости давления от времени. Упомянутая система управления выполнена с возможностью сравнения сформированной кривой зависимости давления от времени с известной стандартной кривой зависимости давления от времени, хранимой в упомянутой системе управления для определения состояния конструкции поршень-цилиндр. Технический результат - повышение надежности системы привода. 3 н. и 14 з.п. ф-лы, 17 ил.
Формула
конструкцию поршень - цилиндр, включающую в себя поршень, который выполнен с возможностью перемещения относительно упомянутого цилиндра;
первый проточный канал, сообщающийся по текучей среде с упомянутой конструкцией поршень - цилиндр;
второй проточный канал, сообщающийся по текучей среде с упомянутой конструкцией поршень - цилиндр;
систему управления, выполненную с возможностью соединения по текучей среде упомянутого первого проточного канала с источником текучей среды высокого давления и для соединения упомянутого второго проточного канала со сливом для перемещения поршня в первом направлении;
датчик давления, соединенный по текучей среде с упомянутым первым проточным каналом и выполненный с возможностью измерения достаточных данных о давлении во время перемещения поршня для формирования кривой зависимости давления от времени, причем упомянутая система управления выполнена с возможностью сравнения сформированной кривой зависимости давления от времени с известной стандартной кривой зависимости давления от времени, хранимой в упомянутой системе управления, для определения состояния конструкции поршень - цилиндр.
цилиндр, определяющий внутреннее пространство и включающий в себя первое отверстие для текучей среды, расположенное рядом с первым концом упомянутого пространства, и второе отверстие для текучей среды рядом со вторым концом упомянутого пространства;
поршень, расположенный во внутреннем пространстве и выполненный с возможностью разделения пространства на первую сторону и вторую сторону, причем упомянутая первая сторона сообщается по текучей среде с первым отверстием для текучей среды, а вторая сторона сообщается по текучей среде со вторым отверстием для текучей среды;
исполнительный элемент, соединенный с поршнем и выполненный с возможностью выполнения работы в ответ на перемещение поршня;
систему управления, выполненную с возможностью селективного соединения по текучей среде упомянутого первого отверстия для текучей среды с одним из источника давления и сливом и соединения второго отверстия для текучей среды с другим из упомянутого слива и упомянутого источника давления для селективного перемещения поршня от упомянутого первого отверстия и к упомянутому первому отверстию; и
датчик давления, сообщающийся по текучей среде с упомянутой первой стороной и выполненный с возможностью измерения данных давления во время перемещения поршня, причем система управления выполнена с возможностью сравнения измеренных данных давления с известным стандартом для определения состояния системы.
впуск текучей среды высокого давления в первую сторону конструкции поршень - цилиндр;
выпуск текучей среды низкого давления из второй стороны конструкции поршень - цилиндр, чтобы позволять поршню перемещаться относительно цилиндра к упомянутой второй стороне;
проведение множества измерений давления текучей среды рядом с упомянутой первой стороной во время перемещения поршня;
сравнение множества измерений давления с известным набором величин давления и
определение, вероятно ли повреждение на основе сравнения множества измерений давления с известным набором величин давления.
системе управления.
Комментарии