Система обследования шахтного ствола с синхронизацией движения и способ управления ею с синхронизацией движения - RU2752055C1
Код документа: RU2752055C1
Чертежи




Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники
Настоящее изобретение относится к технологиям разработки механического оборудования, и в частности к системе обследования шахтного ствола с синхронизацией движения и способу управления ею с синхронизацией движения.
Описание связанного уровня техники
Система обследования шахтного ствола образована перемещающимся по тросу роботизированным устройством и устройствами для перемещения троса, которые двигаются вдоль стенки шахтного ствола. Трос находится в шахтном стволе, а перемещающееся по тросу роботизированное устройство размещается на тросе в качестве подвижного узла. Перемещающееся по тросу роботизированное устройство может подниматься, опускаться, приостанавливаться или выполнять подобные движения на тросе; а устройства для перемещения троса могут двигаться вдоль стенки шахтного ствола, тем самым выполняя обследование всего шахтного ствола внутри. Ввиду того, что устройства для перемещения троса, установленные, соответственно, на земле и под землей, двигаются несинхронно, трос может смещаться в ходе работы по причине разных скоростей движения устройств, двигающихся по поверхности и под землей, или даже может наматываться на рабочее оборудование в шахтном стволе.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Техническое решение
Ввиду этого, для того, чтобы решить указанную выше проблему, имеющую место в уровне техники, в настоящем изобретении представлен способ управления системой обследования шахтного ствола с синхронизацией движения по дорожкам. Для достижения указанной выше цели, в настоящем изобретении используются следующие технические решения:
Система обследования шахтного ствола с синхронизацией движения содержит: перемещающееся по тросу роботизированное устройство, трос, поверхностное устройство для перемещения троса, поверхностную дорожку для перемещения троса, подземное устройство для перемещения троса, подземную дорожку для перемещения троса, инерциальный датчик и устройство управления, причем поверхностное устройство для перемещения троса установлено в поверхностной дорожке для перемещения троса, а подземное устройство для перемещения троса установлено в подземной дорожке для перемещения троса; верхний конец троса соединен с поверхностным устройством для перемещения троса, а его нижний конец проходит через перемещающееся по тросу роботизированное устройство и затем соединяется с подземным устройством для перемещения троса; устройство управления управляет подземным и поверхностным устройствами для перемещения троса для их синхронного движения, а затем инерциальный датчик, установленный на перемещающемся по тросу роботизированном устройстве, обнаруживает данные о положении троса и передает данные на устройство управления; устройство управления сначала вычисляет, согласно принятым данным о положении троса, угол раскрытия θZ между осью Z1 местной системы координат (X1, Y1, Z1) и горизонтальной плоскостью (X0, O0, Y0) в естественной системе координат (X0, Y0, Z0); а затем настраивает рабочую скорость поверхностного и подземного устройств для перемещения троса в соответствии с углом раскрытия θZ до тех пор, пока ось троса не будет параллельна оси шахтного ствола; и в этом случае, ось троса параллельна таковой шахтного ствола, естественная система координат (X0, Y0, Z0) является трехмерной системой координат, точкой отсчета которой является пересечение троса и поверхностного устройства для перемещения троса; а местная система координат (X1, Y1, Z1) является трехмерной системой координат, точкой отсчета которой является точка на тросе, соответствующая центру перемещающегося по тросу роботизированного устройства.
Кроме того, подземное и поверхностное устройства для перемещения троса имеют идентичную конструкцию и каждое из них содержит корпус, приводной двигатель и множество подвижных роликов; на корпусе установлен механизм блокирования троса, выполненный с возможностью жесткого зажатия троса; и подвижные ролики содержат ведущий ролик и один или более ведомых роликов;
каждый подвижный ролик расположен и поддерживается роликовой осью, которая установлена в корпусе посредством подшипника; на корпусе неподвижно установлено основание приводного двигателя, а конец выдачи мощности приводного двигателя соединен через редуктор с роликовой осью, которая поддерживает ведущий ролик; а устройство управления управляет, в соответствии с углом раскрытия θZ, рабочими состояниями приводных двигателей подземного и поверхностного устройств для перемещения троса таким образом, чтобы подземное и поверхностное устройства для перемещения троса двигались синхронно.
Кроме того, каждое из подземного устройства для перемещения троса и поверхностного устройства для перемещения троса снабжено направляющим механизмом; направляющий механизм содержит поперечный направляющий механизм и продольный направляющий механизм; поперечный направляющий механизм содержит поперечную направляющую опору и поперечный направляющий ролик; поперечная направляющая опора одним концом соединена с корпусом, а также другим концом соединена с поперечным направляющим роликом, а поперечный направляющий ролик параллелен в осевом направлении поверхности катания, на которой расположены подвижные ролики; продольный направляющий механизм содержит продольную направляющую опору и продольный направляющий ролик; продольная направляющая опора одним концом соединена с корпусом, а также другим концом соединена с продольным направляющим роликом, а продольный направляющий ролик перпендикулярен в осевом направлении поверхности катания, на которой расположены подвижные ролики; и
будучи приведенным в действие посредством приводного двигателя, ведущий ролик работает совместно с поперечным направляющим механизмом и продольным направляющим механизмом для осуществления позиционирования и направления, тем самым приводя в действие ведомые ролики для того, чтобы они всегда двигались по дорожке для перемещения троса.
Кроме того, корпус дорожки дополнительно содержит поперечную направляющую поверхность и продольную направляющую поверхность; одна сторона поверхности катания снабжена продольной направляющей поверхностью, перпендикулярной поверхности катания, а другая ее сторона снабжена L-образной канавкой, образованной вертикальной частью и поперечной частью, которые взаимодействуют на изгибе; направление прохождения вертикальной части перпендикулярно поверхности катания, а проем вертикальной части находится заподлицо с поверхностью катания; направление прохождения поперечной части параллельно поверхности катания, а поперечная часть имеет поперечную направляющую поверхность, параллельную поверхности катания; подвижные ролики предусмотрены непосредственно над поверхностью катания; поперечная направляющая опора размещена в вертикальной части канавки, а поперечный направляющий ролик размещен в поперечной части; один конец поперечной направляющей опоры выходит из вертикальной части, а затем соединяется с корпусом, а другой конец поперечной направляющей опоры соединен с поперечным направляющим роликом, подвешенным на поперечной направляющей поверхности; поперечный направляющий ролик соединен с поперечной направляющей поверхностью с помощью проволоки, а продольный направляющий ролик соединен с продольной направляющей поверхностью с помощью проволоки; и, будучи приведенным в действие приводным двигателем, ведущий ролик может приводить в действие поперечный направляющий ролик для катания по поперечной направляющей поверхности, продольный направляющий ролик для катания по продольной направляющей поверхности, и ведомые ролики для катания по поверхности катания.
Кроме того, корпус выполнен в форме кругового сектора, а роликовые оси распределены в радиальном направлении корпуса в форме кругового сектора; два конца радиальной секции корпуса в форме кругового сектора отдельно снабжены кронштейном, и каждый кронштейн снабжен одним продольным направляющим механизмом и одним поперечным направляющим механизмом; продольный направляющий механизм предусмотрен на конце кронштейна рядом с внутренней круговой поверхностью корпуса в форме кругового сектора; а поперечный направляющий механизм предусмотрен на конце кронштейна рядом с внешней круговой поверхностью корпуса в форме кругового сектора; два продольных направляющих механизма, предусмотренные, соответственно, на двух концах радиальной секции корпуса в форме кругового сектора, расположены симметрично, и два поперечных направляющих механизма, предусмотренные, соответственно, на двух концах радиальной секции корпуса в форме кругового сектора, расположены симметрично; ось продольного направляющего ролика перпендикулярна поверхности в форме кругового сектора корпуса в форме кругового сектора, а ось поперечного направляющего ролика параллельна поверхности в форме кругового сектора корпуса в форме кругового сектора; положения, в которых продольная направляющая опора и поперечная направляющая опора размещены на кронштейне, могут быть отрегулированы в радиальном направлении корпуса в форме кругового сектора.
Другая техническая задача настоящего изобретения заключается в представлении способа управления системой обследования шахтного ствола с синхронизацией движения, который включает следующие этапы:
этап 1 подготовки, на котором
сначала выполняют размещение перемещающегося по тросу роботизированного устройства в заранее установленное положение на тросе, тестирование перемещающегося по тросу роботизированного устройства для проверки его надлежащего функционирования; и регулировку положения поверхностного устройства для перемещения троса на поверхностной дорожке для перемещения троса, а также положения подземного устройства для перемещения троса на подземной дорожке для перемещения троса, для того, чтобы ось троса и ось шахтного ствола стали параллельны друг другу;
этап 2 работы, на котором
выполняют запуск системы обследования шахтного ствола; в начале работы выполняют приведение в действие поверхностного и подземного устройств для перемещения троса с одинаковой скоростью и в одинаковом направлении для перемещения троса вокруг шахтного ствола; передачу данных, обнаруженных инерциальным датчиком, установленным на перемещающемся по тросу роботизированном устройстве, на устройство управления; и обработку данных устройством управления для определения того, что поверхностное и подземное устройства для перемещения троса двигаются синхронно;
этап 3 обеспечения синхронизации движения, на котором
при определении, что поверхностное и подземное устройства для перемещения троса двигаются несинхронно, после выполнения устройством управления обработки принятых данных, обнаруженных инерциальным датчиком, установленным на перемещающемся по тросу роботизированном устройстве, выполняют управление поверхностным и подземным устройствами для перемещения троса в соответствии с геометрическим отношением между углом раскрытия θZ и глубиной шахтного ствола до тех пор, пока ось троса и ось шахтного ствола не станут параллельны друг другу, причем угол раскрытия θZ образован между осью Z1 местной системы координат (X1, Y1, Z1) и горизонтальной плоскостью (X0, O0, Y0) в естественной системе координат (X0, Y0, Z0); естественная система координат (X0, Y0, Z0) является трехмерной системой координат, точкой отсчета которой является пересечение троса и поверхностного устройства для перемещения троса; а местная система координат (X1, Y1, Z1) является трехмерной системой координат, точкой отсчета которой является точка на тросе, соответствующая центру перемещающегося по тросу роботизированного устройства.
Полезный эффект
(1) Способ управления системой обследования шахтного ствола с синхронизацией движения по дорожкам в настоящем изобретении обладает низкими аппаратными затратами и может получать данные о положении троса в режиме реального времени за счет использования лишь инерциального датчика, установленного на перемещающемся по тросу роботизированном устройстве, тем самым определяя то, смещен ли трос, а также управляя дорожками системы обследования шахтного ствола.
(2) Способ управления системой обследования шахтного ствола с синхронизацией движения по дорожкам в настоящем изобретении обращается к программным средствам управления, технология которых является относительно продвинутой по сравнению с управлением с помощью механического устройства, что, таким образом, делает настоящее изобретение высоко адаптируемым и универсально применимым.
(3) Способ, согласно настоящему изобретению, применим к множеству типов дорожек, в том числе, но без ограничения, зубчатым рейкам, гладким дорожкам и подобным.
(4) В способе, согласно настоящему изобретению, в зависимости от необходимости, может быть предусмотрено множество перемещающихся по тросу роботизированных устройств, а данные о положении множества перемещающихся по тросу роботизированных устройств могут выдаваться инерциальными датчиками, установленными, соответственно, на перемещающихся по тросу роботизированных устройствах, тем самым дополнительно повышая точность синхронизации движения между дорожками системы обследования шахтного ствола.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопроводительные чертежи, составляющие части настоящего изобретения, используются для улучшения понимания настоящего изобретения. Машинные описания в примерах вариантов реализации настоящего изобретения используются для объяснения настоящего изобретения, а не для обеспечения неверного ограничения настоящего изобретения. На чертежах:
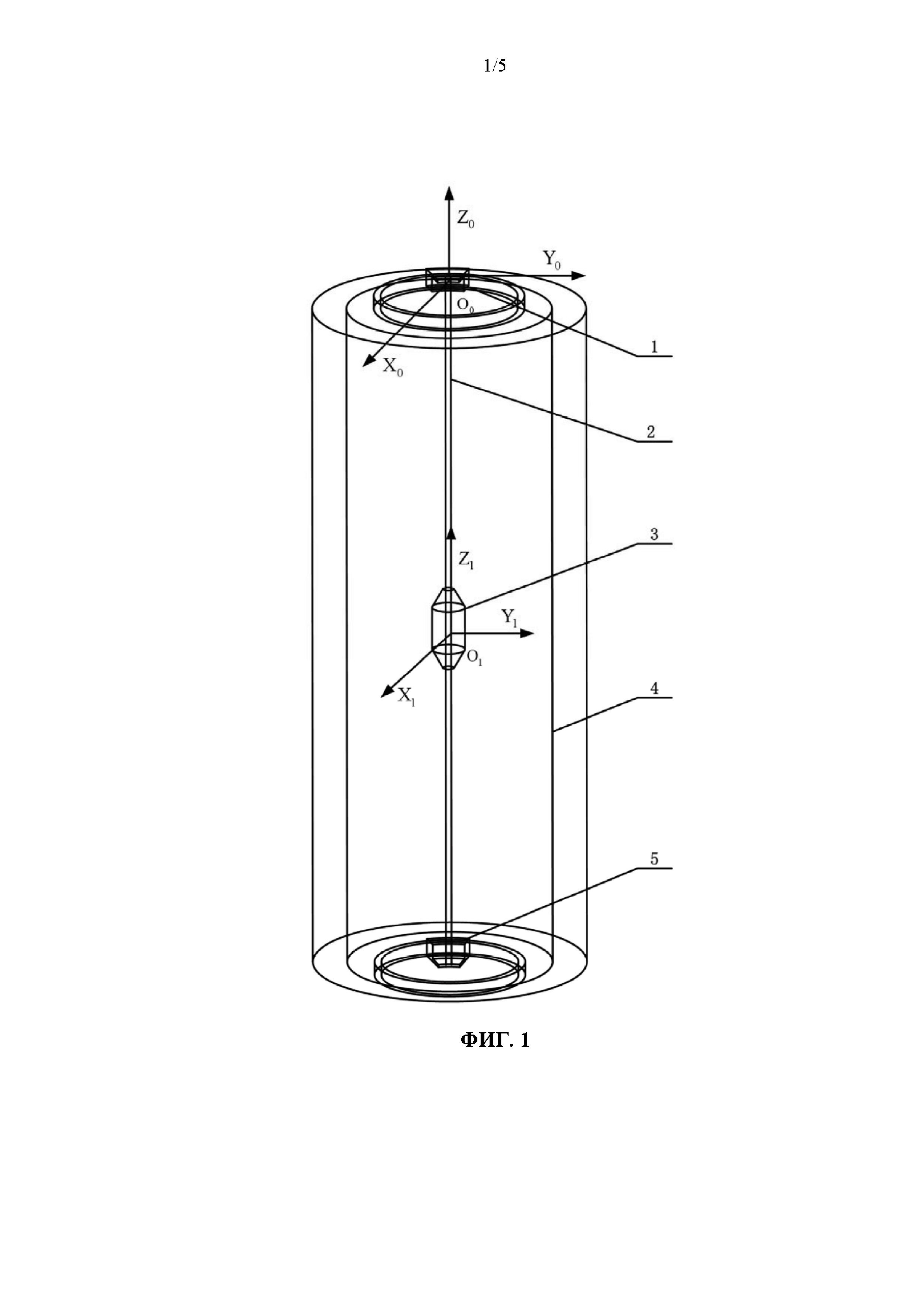
ФИГ. 1 представляет собой схематическую структурную диаграмму системы обследования шахтного ствола с синхронизацией движения в варианте реализации настоящего изобретения;
ФИГ. 2 представляет собой вид в разрезе по ФИГ. 1;
где обозначения расшифровываются следующим образом: 1. Поверхностное устройство для перемещения троса, 2. Трос, 3. Перемещающееся по тросу роботизированное устройство, 4. Шахтный ствол, 5. Подземное устройство для перемещения троса, 6. Естественная система координат (X0, Y0, Z0) и 7. Местная система координат (X1, Y1, Z1).
ФИГ. 3 представляет собой схематическую структурную диаграмму поверхностного/подземного устройства для перемещения троса, показанного на ФИГ. 1;
ФИГ. 4 представляет собой вид сверху поверхностного/подземного устройства для перемещения троса, показанного на ФИГ. 1;
ФИГ. 5 представляет собой схематическую структурную диаграмму поперечного направляющего механизма;
ФИГ. 6 представляет собой структурный увеличенный вид в поперечном сечении, на котором показано, что устройство для перемещения троса установлено в дорожке для перемещения троса;
2-1. Поверхность корпуса в форме кругового сектора, 2-2. Конец радиальной секции корпуса, 2-3. Механизм натяжения троса, 2-4. Двигатель, 2-5. Соединительный болт, 2-6. Торцевая крышка редуктора, 2-7. Пружина, 2-8. Горизонтальная штанга, 2-9. Продольная направляющая опора, 2-10. Продольный направляющий ролик, 2-11. Поперечная направляющая опора, 2-12. Поперечный направляющий ролик, 2-13. Ведомый ролик, 2-14. Редуктор, 2-15. Ведущий ролик, 2-16. Подшипник, 2-17. Ограничительная гайка для поперечного направляющего ролика, 2-18. Муфта, 8. Дорожка для перемещения троса.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение далее описано ниже со ссылкой на сопроводительные чертежи.
Как показано на ФИГ. 1 и 2, в настоящем изобретении представлена система обследования шахтного ствола с синхронизацией движения, которая содержит перемещающееся по тросу роботизированное устройство, трос, поверхностное устройство для перемещения троса, поверхностную дорожку для перемещения троса, подземное устройство для перемещения троса, подземную дорожку для перемещения троса, инерциальный датчик и устройство управления. Поверхностное устройство для перемещения троса установлено в поверхностной дорожке для перемещения троса, а подземное устройство для перемещения троса установлено в подземной дорожке для перемещения троса. Верхний конец троса соединен с поверхностным устройством для перемещения троса, а нижний конец проходит через перемещающееся по тросу роботизированное устройство и затем соединяется с подземным устройством для перемещения троса. Устройство управления управляет подземным и поверхностным устройствами для перемещения троса для их синхронного движения, а затем инерциальный датчик, установленный на перемещающемся по тросу роботизированном устройстве, обнаруживает данные о положении троса и передает данные на устройство управления. Устройство управления сначала вычисляет, согласно принятым данным о положении троса, угол раскрытия θZ между осью Z1 местной системы координат (X1, Y1, Z1) и горизонтальной плоскостью (X0, O0, Y0) в естественной системе координат (X0, Y0, Z0); а затем настраивает рабочие скорости поверхностного и подземного устройств для перемещения троса в соответствии с углом раскрытия θZ до тех пор, пока ось троса и ось шахтного ствола не станут параллельны друг другу. В этом случае, ось троса параллельна таковой шахтного ствола. Естественная система координат (X0, Y0, Z0) является трехмерной системой координат, точкой отсчета которой является пересечение троса и поверхностного устройства для перемещения троса; а местная система координат (X1, Y1, Z1) является трехмерной системой координат, точкой отсчета которой является точка на тросе, соответствующая центру перемещающегося по тросу роботизированного устройства.
В варианте реализации настоящего изобретения также представлен способ управления системой обследования шахтного ствола с синхронизацией движения по дорожкам. Перемещающееся по тросу роботизированное устройство 3 размещают на тросе 2, а положение перемещающегося по тросу роботизированного устройства 3 может отражать положение троса 2 в режиме реального времени. Таким образом, смещение троса 2 может быть вычислено в соответствии с положением перемещающегося по тросу роботизированного устройства 3, а затем выполняют управление синхронизацией между дорожками системы обследования шахтного ствола в соответствии со смещением троса 2 таким образом, чтобы ось троса 2 и ось шахтного ствола стали параллельны друг другу. Благодаря использованию инерциального датчика, может быть обнаружено положение перемещающегося по тросу роботизированного устройства, а также измеряется линейное ускорение и угловое ускорение перемещающегося по тросу роботизированного устройства в трех осях.
Настоящее изобретение функционирует следующим образом:
Этап 1 представляет собой фазу подготовки. Сначала выполняют размещение перемещающегося по тросу роботизированного устройства 3 в заранее установленное положение на тросе 2 и его тестирование для проверки его надлежащего функционирования. Выполняют регулировку положения поверхностного устройства 1 для перемещения троса на поверхностной дорожке для перемещения троса, а также положения подземного устройства 5 для перемещения троса на подземной дорожке для перемещения троса, для того, чтобы ось троса 2 и ось шахтного ствола 4 стали параллельны друг другу. Наконец, выполняют тестирование системы беспроводной связи для устранения задержки передачи данных, потери пакетов и других проблем перемещающегося по тросу роботизированного устройства 3, тем самым обеспечивая стабильную работу системы беспроводной связи.
Этап 2 представляет собой фазу работы. Выполняют запуск системы обследования шахтного ствола. В начале работы поверхностное и подземное устройства 1 и 5 для перемещения троса приводят трос в движение с одинаковой скоростью и в одинаковом направлении для его перемещения вокруг шахтного ствола. В данном случае, естественная система координат (X0, Y0, Z0) 6 и местная система координат (X1, Y1, Z1) 7 совпадают, а ось троса 2 и ось шахтного ствола 4 параллельны. Когда поверхностное и подземное устройства 1 и5 для перемещения троса двигаются несинхронно, трос 2 смещается таким образом, что смещается ось Z1 местной системы координат (X1, Y1, Z1) 7, тогда как оси X1и Y1 не смещаются. Угол раскрытия между осью Z1 и горизонтальной плоскостью (X0, O0, Y0) в естественной системе координат (X0, Y0, Z0) 6 установлен на θZ, и этот угол θZ может быть измерен путем использования инерциального датчика, установленного на перемещающемся по тросу роботизированном устройстве 3. Затем, данные, обнаруженные инерциальным датчиком, отправляются системой беспроводной связи в центр управления. Естественная система координат (X0, Y0, Z0) является трехмерной системой координат, точкой отсчета которой является пересечение троса и поверхностного устройства для перемещения троса; а местная система координат (X1, Y1, Z1) является трехмерной системой координат, точкой отсчета которой является точка на тросе, соответствующая центру перемещающегося по тросу роботизированного устройства.
Этап 3 представляет собой фазу обеспечения синхронизации движения. После приема данных, обнаруженных инерциальным датчиком, центр управления сначала выполняет фильтрационную обработку данных для фильтрации помех в данных, вызванных вибрацией троса, затем он определяет положение троса 2 в соответствии с углом раскрытия θZ, и, наконец, регулирует поверхностным и подземным устройствами 1 и 5 для перемещения троса в соответствии с глубиной шахтного ствола 4. Если после ось троса 2 и ось шахтного ствола 4 параллельны, то в этом случае, необходимости в регулировке поверхностного и подземного устройств 1 и 5 для перемещения троса нет, а требуется лишь поддерживать исходную рабочую скорость. И наоборот, если ось троса 2 и ось шахтного ствола 4 не параллельны, то это указывает на то, что трос 2 смещен, и что поверхностное и подземное устройства 1 и 5 для перемещения троса двигаются несинхронно. В этом случае, необходимо управление поверхностным и подземным устройствами 1 и 5 для перемещения троса в соответствии с геометрическим отношением между углом раскрытия θZ и глубиной шахтного ствола 4. Путем регулировки рабочих скоростей поверхностного и подземного устройств 1 и 5 для перемещения троса, ось троса 2 и ось шахтного ствола 4 становятся параллельны, тем самым реализуя управление синхронизацией движения по дорожкам системы обследования шахтного ствола.
Как показано на ФИГ. 3 - ФИГ. 6, поверхностное устройство для перемещения троса/подземное устройство для перемещения троса (которые далее совместно называются устройством для перемещения троса для обеспечения простоты описания), согласно настоящему изобретению, содержит корпус, приводной двигатель и множество подвижных роликов. Размер и количество подвижных роликов могут быть определены в соответствии с конкретной нагрузкой, а внешний край каждого подвижного ролика может быть покрыт полиуретаном или другим амортизирующим материалом для уменьшения воздействия вибрирующего устройства для перемещения троса на дорожке для перемещения троса. На фигурах показано два подвижных ролика.
Корпус снабжен механизмом блокирования троса, который используется для крепкого зажатия троса для перемещения роботизированного устройства. Механизм блокирования троса может представлять собой доступный в продаже стопор для троса или также может представлять собой другой механизм для блокирования и ограничения. Может быть предусмотрен один или два, или более стопоров для троса. Когда имеется только одна дорожка для перемещения троса, требуется по меньшей мере два стопора для троса для того, чтобы трос с перемещающимся по нему роботизированным устройством мог легко двигаться в шахтном стволе.
Подвижные ролики включают в себя ведущий ролик и один или более ведомых роликов (на фигуре представлен лишь один ведомый ролик). Каждый подвижный ролик расположен и поддерживается роликовой осью, которая установлена в корпусе посредством подшипника. Основание приводного двигателя неподвижно установлено на корпусе, а конец выдачи мощности приводного двигателя соединен через редуктор с роликовой осью, которая поддерживает ведущий ролик. Будучи приведенным в действие приводным двигателем, ведущий ролик может приводить в действие ведомые ролики для их движения по дорожке для перемещения троса.
В частности, ведомый ролик соединен с корпусом посредством роликовой оси и цилиндрического роликового подшипника, а также ограничен в осевом направлении с двух концом, соответственно, посредством торцевых крышек подшипника. Ведущий ролик соединен с корпусом через роликовую ось и цилиндрический роликовый подшипник, а также ограничен в осевом направлении на одном конце посредством торцевой крышки подшипника, а другим концом соединен с редуктором. Мощность приводного двигателя передается от приводного двигателя на ведущий ролик через редуктор.
Для того чтобы устройство для перемещения троса могло двигаться по дорожке для перемещения троса по заранее установленной траектории (а именно, по периферии стенки шахтного ствола), устройство для перемещения троса, согласно настоящему изобретению, снабжено направляющим механизмом, который содержит поперечный направляющий механизм и продольный направляющий механизм. Продольный направляющий механизм используется для обеспечения продольного (в направлении оси шахтного ствола) позиционирования между устройством для перемещения троса и дорожкой для перемещения троса, тем самым предотвращая боковое смещение устройства для перемещения троса. Поперечный направляющий механизм используется для обеспечения поперечного (в направлении, перпендикулярном осевому направлению шахтного ствола) позиционирования между устройством для перемещения троса и дорожкой для перемещения троса.
Поперечный направляющий механизм содержит поперечную направляющую опору и поперечный направляющий ролик. Поперечная направляющая опора одним концом соединена с корпусом, а другим концом соединена с поперечным направляющим роликом; и поперечный направляющий ролик параллелен в осевом направлении поверхности катания, на которой расположены подвижные ролики. В частности, как показано на ФИГ. 5, поперечная направляющая опора представляет собой L-образную штангу, которая образована вертикальной секцией (секцией L-образной штанги, которая параллельна осевому направлению шахтного ствола) и поперечной секцией (секцией L-образной штанги, которая параллельна поперечному направлению шахтного ствола). Вертикальная секция соединена с корпусом, а поперечная секция снабжена буртиком оси. Поперечная секция на внешней стороне буртика оси снабжена поперечным направляющим роликом, а между поперечным направляющим роликом и поперечной секцией установлен подшипник. Поперечная секция на внешней стороне поперечного направляющего ролика снабжена ограничительной гайкой с помощью резьбового соединения. Таким образом, можно сказать, что поперечный направляющий ролик расположен на одной стороне посредством буртика оси, а на другой стороне расположен посредством ограничительной гайки. Продольный направляющий механизм содержит продольную направляющую опору и продольный направляющий ролик. Продольная направляющая опора одним концом соединена с корпусом, а другим концом также соединена с продольным направляющим роликом, и продольный направляющий ролик перпендикулярен в осевом направлении поверхности катания, на которой расположены подвижные ролики. Будучи приведенным в действие посредством приводного двигателя, ведущий ролик работает совместно с поперечным направляющим механизмом и продольным направляющим механизмом для осуществления позиционирования и направления, тем самым приводя в действие ведомые ролики для того, чтобы они всегда двигались по дорожке для перемещения троса.
Для простоты установки подвижных роликов устройства для перемещения троса и направляющих роликов (в том числе поперечного направляющего ролика и продольного направляющего ролика) направляющего механизма, как показано на ФИГ. 6, дорожка для перемещения троса, согласно настоящему изобретению, имеет поверхность катания, поперечную направляющую поверхность и продольную направляющую поверхность. Одна сторона поверхности катания снабжена продольной направляющей поверхностью, перпендикулярной поверхности катания, а другая ее сторона снабжена L-образной канавкой, образованной вертикальной частью и поперечной частью, которые взаимодействуют на изгибе. Направление прохождения вертикальной части перпендикулярно поверхности катания, а проем вертикальной части находится заподлицо с поверхностью катания. Направление прохождения поперечной части параллельно поверхности катания, а поперечная часть имеет поперечную направляющую поверхность, параллельную поверхности катания. Подвижные ролики предусмотрены непосредственно над поверхностью катания. Поперечная направляющая опора размещена в вертикальной части канавки, а поперечный направляющий ролик размещен в поперечной части. Один конец поперечной направляющей опоры выходит из вертикальной части, а затем соединяется с корпусом, а другой конец поперечной направляющей опоры соединен с поперечным направляющим роликом, подвешенным на поперечной направляющей поверхности. Поперечный направляющий ролик соединен с поперечной направляющей поверхностью с помощью проволоки, а продольный направляющий ролик соединен с продольной направляющей поверхностью с помощью проволоки. Будучи приведенным в действие приводным двигателем, ведущий ролик может приводить в действие поперечный направляющий ролик для катания по поперечной направляющей поверхности, продольный направляющий ролик для катания по продольной направляющей поверхности, и ведомые ролики для катания по поверхности катания. Благодаря такому конструктивному исполнению, дорожка для перемещения троса, согласно настоящему изобретению, может обеспечивать направляющую рабочую поверхность (а именно, поперечную направляющую поверхность и продольную направляющую поверхность) для направляющих роликов, а также обеспечивать рабочую поверхность перемещения (а именно, поверхность катания) для подвижных роликов; и, кроме того, обеспечивать пространство для установки поперечного направляющего механизма. Более того, благодаря специфическому способу установки, основные части (в том числе корпус, а также подвижные ролики, приводной двигатель и роликовые оси, которые установлены в/на корпусе) устройства для перемещения троса могут быть уложены в дорожку для перемещения троса посредством поперечного направляющего механизма. Из представленного выше может быть ясно, что поперечный направляющий механизм, согласно настоящему изобретению, не только обладает функцией поперечного направления, но также соединяет основные части устройства для перемещения троса с дорожкой для перемещения троса.
Для того чтобы устройство для перемещения троса могло двигаться по периферии стенки шахтного ствола, в настоящем изобретении корпус выполнен в форме кругового сектора. Ссылаясь на ФИГ. 5, согласно направлению, показанному на ФИГ. 5, корпус в форме кругового сектора представляет собой полузамкнутый кожух, который имеет открытую нижнюю концевую поверхность в форме круглого сектора и окружен верхней пластиной в форме круглого сектора, левой боковой пластиной, правой боковой пластиной, передней дугообразной пластиной и задней дугообразной пластиной. Левая боковая пластина и правая боковая пластина размещены, соответственно, на левом и правом концах радиальной секции корпуса в форме кругового сектора; передняя дугообразная пластина расположена на внешней круговой поверхности корпуса в форме кругового сектора; а задняя дугообразная пластина расположена на внутренней круговой поверхности корпуса в форме кругового сектора. В данном случае, приводной двигатель установлен непосредственно на верхней поверхности верхней пластины в форме кругового сектора, а роликовые оси распределены в радиальном направлении корпуса в форме кругового сектора. Подвижные ролики могут быть доступны с открытой нижней концевой поверхности в форме кругового сектора корпуса в форме кругового сектора таким образом, чтобы подвижные ролики могли непосредственно вступать в контакт с поверхностью катания дорожки для перемещения троса.
Когда ввиду другой нагрузки выбран другой приводной двигатель, основание двигателя, соединитель или другие устройства могут быть добавлены в зависимости от необходимости для фиксации приводного двигателя.
Для обеспечения соединения между направляющим механизмом и корпусом, а также для обеспечения устойчивости направления, два конца радиальной секции корпуса в форме кругового сектора, согласно настоящему изобретению, отдельно снабжены кронштейном, и каждый кронштейн снабжен одним продольным направляющим механизмом и одним поперечным направляющим механизмом. Продольный направляющий механизм предусмотрен на конце кронштейна рядом с внутренней круговой поверхностью корпуса в форме кругового сектора; а поперечный направляющий механизм предусмотрен на конце кронштейна рядом с внешней круговой поверхностью корпуса в форме кругового сектора. Два продольных направляющих механизма, предусмотренные, соответственно, на двух концах радиальной секции корпуса в форме кругового сектора, расположены симметрично, и два поперечных направляющих механизма, предусмотренные, соответственно, на двух концах радиальной секции корпуса в форме кругового сектора, расположены симметрично. Ось продольного направляющего ролика перпендикулярна поверхности в форме кругового сектора корпуса в форме кругового сектора, а ось поперечного направляющего ролика параллельна поверхности в форме кругового сектора корпуса в форме кругового сектора. Положения, в которых продольная направляющая опора и поперечная направляющая опора размещены на кронштейне, могут быть отрегулированы в радиальном направлении корпуса в форме кругового сектора.
В частности, каждый кронштейн содержит одну или более горизонтальных штанг. Эти горизонтальные штанги распределены на равных интервалах в направлении высоты каждого конца радиальной секции корпуса в форме кругового сектора, а конец радиальной секции корпуса в форме кругового сектора снабжен фиксирующим блоком. Горизонтальные штанги поддерживаются и фиксируются посредством фиксирующего блока, а также расположены в радиальном направлении корпуса в форме кругового сектора. Два конца каждой горизонтальной штанги отдельно находятся в резьбовом соединении с зажимной гайкой. Продольная направляющая опора снабжена установочными отверстиями a, которые соответствуют горизонтальным штангам. Горизонтальные штанги соединены с продольной направляющей опорой через их соответствующие установочные отверстия a, и на каждую горизонтальную штангу между продольной направляющей опорой и фиксирующим блоком надета пружина a. Пружина a расположена для того, чтобы уменьшать помехи, создаваемые для движения основных частей устройства для перемещения троса, когда продольный направляющий механизм вибрирует в ходе своей работы. Поперечная направляющая опора снабжена установочными отверстиями b, которые соответствуют горизонтальным штангам. Горизонтальные штанги соединены с поперечной направляющей опорой через их соответствующие установочные отверстия b, и на каждую горизонтальную штангу между поперечной направляющей опорой и фиксирующим блоком надета пружина b. Пружина b расположена для того, чтобы уменьшать помехи, создаваемые для движения основных частей устройства для перемещения троса, когда поперечный направляющий механизм вибрирует в ходе своей работы.
Выше были описаны лишь предпочтительные варианты реализации настоящего изобретения. Следует отметить, что специалист в данной области техники может осуществить некоторые улучшения и модификации, не выходя при этом за рамки замысла настоящего изобретения, причем эти улучшения и модификации также следует понимать, как входящие в рамки объема защиты настоящего изобретения.
Реферат
Изобретение относится к системе обследования шахтного ствола с синхронизацией движения и способу управления системой. Система обследования шахтного ствола содержит трос, перемещающееся по тросу роботизированное устройство, поверхностное устройство для перемещения троса, поверхностную дорожку для перемещения троса, подземное устройство для перемещения троса, подземную дорожку для перемещения троса, инерциальный датчик и устройство управления. Верхний конец троса соединен с поверхностным устройством для перемещения троса, а нижний конец проходит через перемещающееся по тросу роботизированное устройство и соединяется с подземным устройством для перемещения троса. Устройство управления управляет подземным и поверхностным устройствами для перемещения троса для их синхронного движения, а инерциальный датчик, установленный на перемещающемся по тросу роботизированном устройстве, обнаруживает данные о положении троса и передает данные на устройство управления. Изобретение позволяет получать данные о положении троса в режиме реального времени за счет использования лишь инерциального датчика, установленного на перемещающемся по тросу роботизированном устройстве, определяя, смещен ли трос, а также управляя дорожками системы обследования шахтного ствола. 2 н. и 4 з.п. ф-лы, 6 ил.
Комментарии