Способ распознавания детонационных стуков - RU2258833C2
Код документа: RU2258833C2
Чертежи




Описание
Настоящее изобретение относится к способу распознавания детонационных стуков, возникающих при детонационном сгорании топлива в двигателе внутреннего сгорания (ДВС).
Известно, что в ДВС, оснащенных системой регулирования по детонации, используют датчики детонационного сгорания, выходные сигналы которых позволяют определить наличие или отсутствие детонационного сгорания. Для распознавания детонации используют, например, датчики корпусного шума, при этом используют системы с одним единственным датчиком детонационного сгорания, системы с двумя датчиками детонационного сгорания, устанавливаемыми в заданных местах блока цилиндров двигателя, или системы, в которых для каждого цилиндра предусмотрено по датчику детонационного сгорания. Основная проблема, с которой приходится сталкиваться при обработке сигналов, поступающих от датчиков детонационного сгорания, состоит в отделении обусловленного детонационными стуками сигнала от сигналов, обусловленных остальными шумами. Поскольку и сигнал детонационного стука и сигнал фонового шума зависят от различных условий или режимов работы ДВС, анализ на наличие или отсутствие детонационных стуков проводят, как это известно, в зависимости от частоты вращения вала двигателя.
В описании к известному из DE-P 4332711 устройству для распознавания детонационных стуков рассмотрен процесс обработки выходных сигналов от двух датчиков детонационного сгорания с целью обнаружения детонационных стуков. При этом в микропроцессоре на основе предыдущих сигналов детонационных стуков формируются опорные значения уровня, которые сравниваются с фактическим выходным сигналом, соответствующим обработанному сигналу датчика детонационного сгорания. Если уровень этого сигнала превышает опорное значение уровня, то данный факт указывает на наличие детонации и в соответствии с этим, например, в систему зажигания выдается управляющий сигнал, который обеспечивает устранение детонации в последующих циклах сгорания. С той целью, чтобы можно было учесть зависимость сигнала фонового шума и сигнала детонационного стука от частоты вращения вала двигателя и обеспечить оптимальное распознавание детонационных стуков, предусмотрено изменение опорного значения уровня в зависимости от частоты вращения, при этом с увеличением частоты вращения повышается и опорное значение уровня.
Для повышения эффективности выделения сигналов, обусловленных детонационными стуками, предлагается способ распознавания детонационных стуков в ДВС. Этот способ предусматривает использование по меньшей мере одного датчика детонационного сгорания и установленного за ним блока обработки сигналов, имеющего по меньшей мере один компаратор, который сравнивает обработанный выходной сигнал датчика детонационного сгорания с переменным опорным значением уровня, формируемым на основании предыдущих выходных сигналов этого датчика детонационного сгорания. Опорное значение уровня поступает в компаратор через фильтр нижних частот, и компаратор в зависимости от результата указанного сравнения устанавливает факт наличия или отсутствия детонации.
Решение вышеназванной задачи достигается тем, что отслеживание опорного значения уровня или расчет значения входного сигнала фильтра нижних частот осуществляют по меньшей мере двумя различными методами, при этом выбор того или другого метода зависит от наличия или отсутствия динамического режима работы ДВС.
Преимущество предлагаемого в изобретении способа распознавания детонационных стуков заключается в возможности надежного выявления детонационных стуков независимо от интенсивности шумов во всем диапазоне рабочих режимов ДВС. Достигается это преимущество благодаря тому, что дополнительно к обычному отслеживанию опорного значения уровня предусмотрено более эффективное отслеживание этого опорного значения уровня при динамическом режиме прежде всего тех ДВС, которые характеризуются значительным увеличением уровня шумов при работе в динамическом режиме. Предлагаемый способ позволяет исключить ошибочное распознавание детонациолных стуков и в двигателях, уровень шума которых превышает средний показатель, соответственно в двигателях, работа которых в некоторых режимах сопровождается возрастанием уровня шума выше среднего, поскольку и в этом случае предусмотрена связанная с указанным выше преимуществом коррекция опорного значения уровня.
В предпочтительных вариантах осуществления изобретения опорное значение уровня rkr(нов.) может формироваться в зависимости от предварительно установленного факта наличия или отсутствия детонации и наличия или отсутствия динамического режима с помощью следующих уравнений:
а) rkr(нов.)=(1-1/KRFTP)•rkr(предыд.)+1/KRFTP•ikr,
б) rkr(нов.)=(1-1/KRFTP)•rkr(предыд.)+l/KRFTP•(ikr/ke) или
в) rkr(нов.)=(1-1/KRFTP)•rkr(предыд.)+1/ККРТР•(rkr(предыд.)•ke),
где rkr(предыд.) означает предыдущее опорное значение уровня, KRFTP представляет собой следящий коэффициент, ikr означает уровень шума в текущем цикла сгорания и ke представляет собой коэффициент.
При этом особое преимущество состоит в том, что более эффективное отслеживание опорного значения уровня при динамическом режиме позволяет быстрее отслеживать это опорное значение уровня. Такое быстрое отслеживание достигается за счет уменьшения при наличии динамического режима соответствующего коэффициента по сравнению с обычным режимом.
Факт наличия детонации может устанавливаться в том случае, когда значение virkr, рассчитываемое как отношение значения уровня детонационного шума ikr в текущем цикле сгорания к предыдущему опорному значению уровня rkr(предыд.), превышает заданное значение ke.
Кроме того, при задании нового опорного значения уровня могут учитываться также предыдущие значения, определенные при установленном факте детонации, а при формировании опорного значения уровня rkr дополнительно может учитываться, не превышает ли отношение virkr порогового значения ke•(KRRPN•(ke-1)+1), где ke характеризует порог распознавания детонационных стуков, a KRRPN представляет собой коэффициент, принимающий значения от 0 до 1.
Ниже изобретение более подробно рассмотрено на примере некоторых вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - возможный вариант выполнения устройства для распознавания детонационных стуков, позволяющего осуществлять предлагаемые в изобретении методы распознавания детонации,
на фиг.2 и 3 - блок-схемы, на которых проиллюстрированы операции, выполняемые при осуществлении двух предлагаемых в изобретении методов распознавания детонационных стуков,
на фиг.4 - характеристики различных величин, используемых для расчета опорного значения уровня.
В показанном на фиг.1 варианте выполнения устройство для распознавания детонационных стуков в ДВС имеет два датчика 10, 11 детонационного сгорания, например в виде датчиков корпусного шума, которые установлены в заданных местах блока 12 цилиндров ДВС. Выдаваемые этими датчиками 10, 11 детонационного сгорания сигналы S1, S2 зависят как от шума двигателя, так и от возможно присутствующих посторонних шумов (шумовых помех) и возможно присутствующих детонационных стуков. Для надежного распознавания детонационных стуков выдаваемые датчиками сигналы необходимо разделять на эти составляющие, соответственно выделять их из выдаваемых датчиками сигналов. С этой целью выдаваемые датчиками 10, 11 детонационного сгорания сигналы S1 и S2 подаются на соответствующую последующую обработку в блок обработки сигналов, выходной сигнал S3 которого указывает на наличие или отсутствие детонации.
Блок 13 обработки сигналов может быть выполнен в виде отдельной схемы либо может входить в состав микрокомпьютера. Блок 13 обработки сигналов может быть встроен, например, в блок управления ДВС. Микрокомпьютер 14, осуществляющий дальнейшую обработку сигналов S3, поступающих от блока 13 обработки сигналов, может представлять собой, например, микропроцессор блока управления. Микрокомпьютер 14 управляет устройствами 15 системы зажигания и/или устройствами 16 системы впрыскивания топлива в зависимости от сигнала S3, позволяющего определить наличие или отсутствие детонации, и регулирует таким путем протекание процесса горения в отдельных цилиндрах ДВС.
Для оптимального регулирования работы ДВС в микрокомпьютер 14 поступают и другие сигналы, например от датчика 17, который представляет собой, например, датчик положения дроссельной заслонки. Очевидно, что можно использовать любое количество датчиков, выходные сигналы которых после соответствующей предварительной обработки поступают в микрокомпьютер и обрабатываются в нем. В показанном на фиг.1 варианте каждый из сигналов поступает на соответствующий вход, которые обозначены позициями Е1 и Е2, при этом выходные сигналы подаются на выходы, обозначенные позициями А1, А2 и А3.
Собственно распознавание детонационных стуков, т.е. установление факта наличия или отсутствия детонации, происходит в блоке 13 обработки сигналов. В состав этого блока 13 обработки сигналов в рассматриваемом варианте его выполнения входит по меньшей мере один усилитель 18 с регулируемым коэффициентом усиления, в который поступают выходные сигналы S1 и S2 датчиков 10 и 11 детонационного сгорания. При этом на вход усилителя в каждом случае поступает выходной сигнал для того цилиндра, соответствие которого цилиндру, в котором в данный момент фактически происходит сгорание топлива, задается соответствующей программой. С выходом усилителя соединен полосовой фильтр 19, из подвергаемых в котором фильтрации усиленных сигналов выделяются составляющие с типичными для детонационных стуков частотами. С выходом полосового фильтра соединен демодулятор (детектор) 20, например выпрямитель. Сигналы с выхода демодулятора 20 интегрируются в интеграторе 21 и затем интегрированные сигналы KI поступают на первый вход компаратора 22.
На другой вход компаратора 22 поступает опорный сигнал, соответственно опорное значение уровня сигнала Ref, формируемое, например, с использованием 5 фильтра 23 нижних частот путем усреднения предварительно обработанных заданным образом сигналов от датчиков детонационного сгорания. Каким именно образом формируются фактические опорные величины уровня сигнала и какие значения они принимают, является основным объектом изобретения, более подробно рассмотренным ниже.
Конкретное устройство отдельных элементов блока 13 обработки сигналов не имеет существенного значения для изобретения и поэтому подробно не рассматривается. Блок 13 обработки сигналов может быть и полностью выполнен в виде цифрового блока обработки, например в виде микропроцессора.
С помощью показанного на фиг.1 устройства процесс распознавания детонации, соответственно, детонационных стуков протекает следующим образом. Датчики 10, 11 детонационного сгорания регистрируют шумы, создаваемые двигателем, и выдают соответствующие сигналы S1 и S2 в блок 13 обработки сигналов. В этом блоке указанные сигналы соответствующим образом фильтруются и усиливаются. В результате сравнения интегрированных сигналов KI детонационных стуков с опорным значением уровня сигнала Ref формируется сигнал S3, указывающий на наличие или отсутствие детонации.
Конкретно процесс распознавания детонационных стуков в ДВС с использованием датчиков детонационного сгорания, работающих в качестве датчиков корпусного шума, можно пояснить на примере блок-схемы, представленной на фиг.2. В этом варианте на первом шаге SCH1 определяется уровень шума ikr в текущем цикле сгорания. На основании этого уровня шума ikr на шаге SCH3 определяется величина virkr, рассчитываемая как отношение уровня шума ikr, зарегистрированного на текущем цикле сгорания, к усредненному по нескольким циклам сгорания в одном и том же цилиндре уровню шума, так называемому опорному значению уровня rkr, при этом предварительно на шаге SCH2 вводится предыдущее опорное значение уровня rkr(предыд.).
Затем рассчитанное на шаге SCH3 отношение virkr проверяется на шаге SCH4 с целью определить, не превышает ли оно коэффициента ke, соответствующего пороговому значению распознавания детонационных стуков. Если отношение virkr=ikr/rkr(предыд.) превышает это пороговое значение ke распознавания детонационных стуков, то это указывает на наличие детонации, и в этом случае выдается сигнал KL. Таким образом, справедливо также следующее условие: если значение ikr больше значения rkr(предыд.)•ke, то это указывает на наличие детонации, и выдается соответствующий сигнал KL.
Если же на шаге SCH4 будет установлено, что значение virkr не превышает значения ke, то это указывает на отсутствие детонации, и поэтому осуществляется переход к шагу SCH5, на котором опорное значение уровня rkr(предыд.) при работе двигателя в бездетонационном режиме рассчитывается рекурсивно согласно следующей формуле:
rkr(нов.)=(1-1/KRFTP)•rkr(предыд.)+1/KRFTP•ikr.
Величина KRFTP является так называемым следящим коэффициентом. Этот следящий коэффициент может быть соответствующим образом согласован с конкретным типом ДВС.
Полученное таким путем новое опорное значение уровня rkr(нов.) характеризует фоновый шум, создаваемый ДВС при его работе без детонации. В следующем цикле выполнения рассмотренной выше процедуры рассчитанное на шаге SCH5 новое опорное значение уровня rkr(нов.) приравнивается на шаге SCH6 к предыдущему опорному значению уровня rkr(предыд.) и используется для следующего вычисления отношения virkr. Если на шаге SCH4 сгорание регистрируется как детонационное, то значение измеренного для этого цикла сгорания уровня шума ikr не полностью включается при вычислении в опорное значение уровня rkr. Каким образом эта величина учитывается в расчетах при наличии детонации, зависит от наличия или отсутствия динамического режима работы. С этой целью на шаге SCH7 проверяется, работает ли ДВС в динамическом режиме. Для определения наличия или отсутствия подобного динамического режима можно, например, проверять, происходит ли существенное изменение частоты вращения.
При отсутствии динамического режима значение измеренного уровня шума ikr делится на значение ke и в таком виде учитывается при расчетах с целью избежать возрастания опорного значения уровня rkr в результате появления детонационных стуков. В этом случае новое опорное значение уровня rkr(нов.) рассчитывается на шаге SCH8 по следующей формуле:
rkr(нов.)=(1-1/KRFTP)•rkr(предыд.)+1/KRFTP•(ikr/ke).
Не учитывать при расчетах детонационные циклы сгорания в принципе нельзя, поскольку в возникающем при таком детонационном сгорании шуме в случае динамического режима также присутствуют составляющие, обусловленные естественным увеличением уровня шума ДВС, и поэтому подобный шум необходимо соответственно регистрировать вместе с остальными шумами.
С целью исключить при быстром и значительном увеличении фонового шума в динамическом режиме (на наличие которого указывает принятое на шаге SCH7 решение) ошибочное распознавание детонации, т.е. с целью исключить ошибочное принятие циклов сгорания, внезапно создающих более громкий шум, за детонацию, предусмотрены две следующие меры, вводимые на время работы двигателя в динамическом режиме: ускорение отслеживания опорного значения уровня за счет выбора меньшего коэффициента KRFTP и повышение порога распознавания детонационных стуков.
Несмотря на указанные контрмеры, направленные против ошибочного принятия иных шумов за детонацию, у ДВС, соответственно у двигателей с превышающим средние показатели увеличением уровня шума, например вследствие перекоса поршня, возможно ошибочное распознавание детонационных стуков при их фактическом отсутствии. Однако такое сгорание, ошибочно принятое за детонационное, приводит в результате описанного выше процесса определения удельной доли шума ikr, создаваемого на текущем цикле сгорания, путем его деления на значение ke при включении в вычисление опорного значения уровня rkr к неоправданному замедлению отслеживания расчетного фонового шума rkr. Указанное расхождение между фактическим и расчетным значениями уровня фонового шума может приводить в последующем к появлению дополнительных ошибок в распознавании детонации. Поскольку при каждом обнаружении детонационных стуков ответной мерой является в конечном итоге изменение угла опережения зажигания в сторону более позднего, следствием ошибочного принятия иного шума за детонацию может стать соответствующее снижение мощности и к.п.д., что в случае подобного ошибочного распознавания детонации является абсолютно излишним. Поэтому описанное выше опорное значение уровня при наличии выявленного на шаге SCH7 динамического режима работы двигателя рассчитывается согласно изобретению другим методом, что позволяет снизить вероятность ошибочного принятия иного шума за детонацию и вместе с тем по-прежнему обеспечить надежное распознавание фактически имеющей место детонации.
В зависимости от наличия или отсутствия динамического режима новое опорное значение уровня рассчитывается либо по формуле, указанной для шага SCH8, либо по формуле, указанной для шага SCH9. В этом случае на шаге SCH6 предыдущее опорное значение уровня rkr(предыд.) каждый раз заменяется на новое его значение rkr(нов.), которое на шаге SCH3 снова используется для вычисления отношения.
Таким образом, при обнаруженной детонации, при фактически имеющей место детонации либо при ошибочном принятии иного шума за детонацию в рассмотренном выше методе при наличии динамического режима опорное значение уровня rkr(нов.) рассчитывается по следующей видоизмененной формуле:
rkr(нов.)=(1-1/KRFTP)•rkr(предыд.)+1/KRFTP•(rkr(предыд.)• ke).
При этом величина rkr(предыд.)•ke соответствует именно тому уровню шума, который все еще не принимался бы за детонационный. Иными словами, в отличие от способа, в котором не делается различия между наличием и отсутствием динамического режима, в данном случае для отслеживания опорного значения уровня в расчеты включается большее значение, которое, однако, однозначно следует из среднего значения уровня шума. Такой метод определения опорного значения уровня позволяет исключить ошибочное принятие иного шума за детонацию, а тем самым и бесполезное снижение мощности и к.п.д.
На фиг.3 показан следующий вариант осуществления изобретения, в котором при наличии динамического режима учитывается отслеживание опорного значения уровня. Этот метод отличается от метода, проиллюстрированного на фиг.2, лишь наличием дополнительного шага SCH10, на котором предусмотрен дополнительный запрос порогового значения. При обнаружении детонации на шаге SCH4 и при выявлении динамического режима на шаге SCH7 (в случае либо фактически имеющей место детонации, либо ошибочного распознавания детонации) непосредственно выполняется операция, предусмотренная на указанном шаге SCH10. На этом шаге значение virkr сравнивается с пороговым значением ke•(KRRPN•(ke-l)+1), при этом коэффициент KRRPN может принимать значения в интервале от 0 до 1 (0, 1), лежащем в пределах от ke до ke2. Если указанное пороговое значение не превышено, то опорное значение уровня рассчитывается на шаге SCH9 по следующей формуле:
rkr(нов.)=(1-1/KRFTP)•rkr(предыд.)+1/KRFTP•(rkr(предыд.)•ke).
Если же значение отношения virkr выходит за это пороговое значение, то новое опорное значение рассчитывается по следующей указанной для шага SCH8 формуле, которая соответствует формуле, использовавшейся ранее в случае обнаруженной детонации
rkr(нов.)=(1-1/KRFTP)• rkr(предыд.)+l/KRFTP•(ikr/ke).
Дополнительное введение подобного переменного порогового значения позволяет использовать при значении KRRPN, равном 0, прежний режим отслеживания опорного значения уровня, и наоборот, значение KRRPN, равное 1, обеспечивает максимально быстрое отслеживание опорного значения уровня, что необходимо для ДВС, соответственно, двигателей с быстрым нарастанием уровня шума при динамическом изменении частоты вращения. Тем самым удается на длительный период времени уменьшить вероятность ошибочного распознавания детонации при динамическом режиме и связанные с этим потерю мощности и снижение к.п.д.
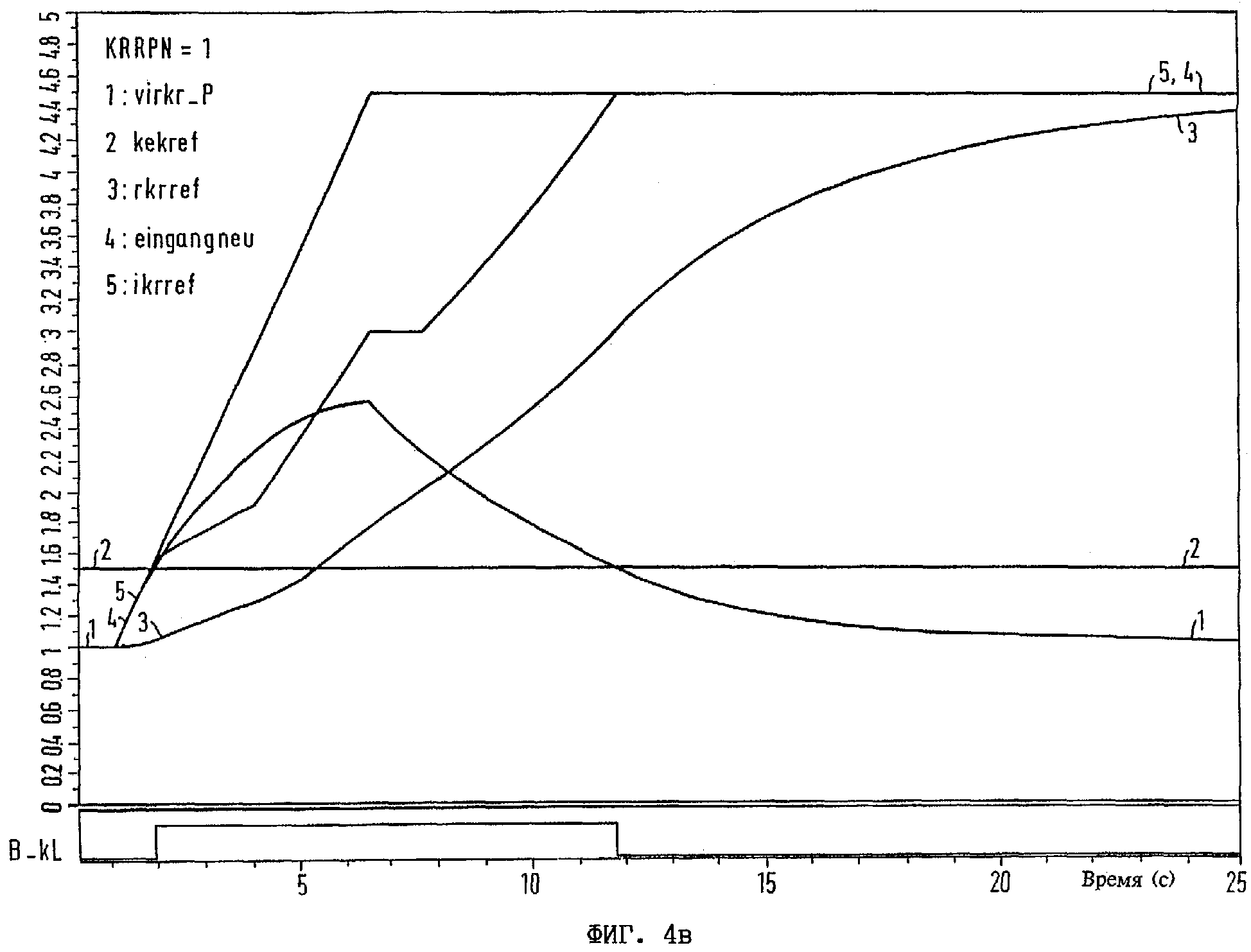
На фиг.4 (4а, 4б и 4в) показаны примеры полученных путем моделирования характеристик для следующих величин:
virkr_P: отношение уровня шума ikr, создаваемого в текущем цикле сгорания, к среднему значению уровня шума, зарегистрированному в последнем цикле сгорания в одном и том же цилиндре,
kekref: порог распознавания детонационных стуков,
rkrref: опорное значение уровня=плавно изменяющееся среднее значение по последним циклам сгорания,
eingangneu: значение, используемое для расчета фактического опорного значения уровня,
ikrref: уровень шума, создаваемого в текущем цикле сгорания, при этом для коэффициента KRRPN были выбраны соответственно значения 0 (фиг.4а), 0,5 (фиг.4б) и 1,0 (фиг.4в). Линия B_kl указывает на наличие обнаруженной детонации (высокий уровень) или на отсутствие детонации (низкий уровень).
Реферат
Изобретение относится к способам распознавания детонационных стуков, возникающих при детонационном сгорании в двигателе внутреннего сгорания (ДВС). Технический результат заключается в возможности повышения эффективности выделения сигналов, обусловленных детонационными стуками в ДВС, от сигналов, обусловленных остальными шумами в ДВС. Способ согласно изобретению обеспечивается с помощью, по меньшей мере, одного датчика детонационного сгорания и установленного за ним блока обработки сигналов, имеющего, по меньшей мере, один компаратор. Обработанный выходной сигнал датчика детонационного сгорания сравнивается компаратором с переменным опорным значением уровня, формируемым на основании предыдущих выходных сигналов этого датчика детонационного сгорания. При этом опорное значение уровня поступает в компаратор через фильтр нижних частот, и компаратор в зависимости от результата указанного сравнения устанавливает факт наличия или отсутствия детонации. Отслеживание опорного значения уровня или расчет значения входного сигнала фильтра нижних частот осуществляют, по меньшей мере, двумя различными методами. При этом выбор того или другого метода зависит от наличия или отсутствия динамического режима работы ДВС. 4 з.п. ф-лы, 6 ил.

Формула
Документы, цитированные в отчёте о поиске
Устройство для обнаружения ошибок в приспособлении для обнаружения детонационных стуков
Комментарии