Обнаруживающая, роющая, поддерживающая, анкерующая и передающая комплексная машинная система для быстрого рытья скважины и способ ее применения - RU2748264C1
Код документа: RU2748264C1
Чертежи





Описание
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к технической области горного оборудования и, в частности, к обнаруживающей, роющей, поддерживающей, анкерующей и передающей комплексной машинной системе для быстрого рытья скважины и способу ее применения.
ОПИСАНИЕ СВЯЗАННОГО УРОВНЯ ТЕХНИКИ
[0002] По мере увеличения глубины добычи добывающей шахты, напряжение в грунте, а также напряжение в окружающей породе и деформация, становятся сложными и разнообразными. Анкерная решетчатая опора используется в большинстве случаев тоннельной добычи ввиду хорошего эффекта поддерживания, широкого диапазона применения, гибкости адаптации к изменениям в соответствии с состоянием туннеля и других характеристик анкерной решетчатой опоры. Однако в существующем процессе тоннельного рытья эффективность механизированного рытья очень высока, а скорость поддержания тоннеля сильно отстает от скорости рытья. Ввиду серьезного расхождения времени рытья, времени поддержания и времени заанкеривания, время проходимости роющей машины намного меньше общего рабочего времени, и через большое количество времени роющая машина прекращает работу для выполнения операции поддержания. Одним вариантом решения серьезного расхождения между временем рытья, временем поддержания и временем заанкеривания является реализация параллельной операции рытья, поддержания и заанкеривания.
[0003] В CN104500086A раскрыт патент под названием «АВТОМАТИЧЕСКАЯ КОМПЛЕКСНАЯ МАШИНА ДЛЯ РЫТЬЯ И ЗААНКЕРИВАНИЯ ТОННЕЛЯ». Ее поддерживающая система включает лишь временную опору и опору на заанкеренных стержнях, и не может решить проблему падения небольших фрагментов окружающей породы. Если анкерная решетка должна быть установлена, к рабочей секции необходимо приблизиться вручную, и бурильная головка должна быть остановлена для обеспечения безопасности рабочих. Таким образом, параллельная операция рытья, поддержания и заанкеривания не может быть реализована, а, в то же время, пыль, шумы и другие факторы также существенно снижают безопасность рабочих. Кроме того, большинство существующих технологий не могут осуществлять предварительное обнаружение и не содержат автоматический механизм замены анкерного стержня. В результате, уровень безопасности не высок, а рабочая эффективно низка.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Техническая задача
[0004] Для решения указанной выше проблемы, в настоящем изобретении представлена обнаруживающая, роющая, поддерживающая, анкерующая и передающая комплексная машинная система для быстрого рытья скважины.
Техническое решение
[0005] Для достижения указанной выше цели, в настоящем изобретении используются следующие технические средства:
[0006] В настоящем изобретении представлена обнаруживающая, роющая, поддерживающая, анкерующая и передающая комплексная машинная система для быстрого рытья скважины, включающая корпус роющей машины продольно-осевого типа, при этом на корпусе роющей машины продольно-осевого типа размещена буровая часть с двумя коромысловыми рычагами, анкерующая и поддерживающая часть, снабженная автоматическим механизмом замены стержня, отбойная перегородка, участвующая во временном поддержании и защите анкерующей и поддерживающей части, и обнаруживающая часть для раннего обнаружения.
[0007] Кроме того, буровая часть с двумя коромысловыми рычагами включает крепежный кронштейн двигателя коромыслового рычага, приваренный на корпусе роющей машины продольно-осевого типа, двигатель коромыслового рычага, прикрепленный к крепежному кронштейну двигателя коромыслового рычага, при этом двигатель коромыслового рычага соединен с первичным коромысловым рычагом посредством масляного цилиндра вращения, первичный коромысловый рычаг соединен со вторичным коромысловым рычагом посредством вращательной пары, при этом вращательная пара соединена с двигателем коромыслового рычага посредством системы трансмиссии, размещенной в первичном коромысловом рычаге, буровой двигатель, размещенный на вторичном коромысловом рычаге, и буровую головку, установленную на буровом двигателе; анкерующая и поддерживающая часть включает нижнюю пластину анкерующей и поддерживающей части, приваренную к двум сторонам корпуса роющей машины продольно-осевого типа, при этом нижняя пластина анкерующей и поддерживающей части соединена с подающим скользящим блоком через рельс скольжения, при этом подающий скользящий блок шарнирно сочленен с наклонным рельсом скольжения, выполненным с возможностью наклона вверх и вниз, наклонный скользящий блок соответствующим образом расположен на наклонном рельсе скольжения, при этом наклонный рельс скольжения приводится в действие с помощью гидравлического цилиндра наклона анкерующей и поддерживающей части, установленного на подающем скользящем блоке, второй роторный двигатель, расположенный на наклонном скользящем блоке, при этом второй роторный двигатель шарнирно сочленен с первым роторным двигателем, гидравлический цилиндр двигателя, приводящий в действие первый роторный двигатель для наклона вверх и вниз, расположенный на втором роторном двигателе, и первый роторный двигатель соединен с машиной для сверления анкерного стержня через скользящий блок машины для сверления анкерного стержня, при этом машина для сверления анкерного стержня скользит относительно скользящего блока машины для сверления анкерного стержня посредством зубчатой рейки, автоматический механизм замены стержня, размещенный на машине для сверления анкерного стержня, при этом автоматический механизм замены стержня включает раму для замены стержня, приваренную к машине для сверления анкерного стержня, при этом рама для замены стержня соединена с коробом для анкерного стержня посредством соединительной пластины, при этом соединительная пластина снабжена гидравлическим цилиндром вращения короба для приведения во вращение короба для анкерного стержня и ограничительным гидравлическим цилиндром, соответствующим гидравлическому цилиндру вращения короба, нижняя часть короба для анкерного стержня соответствующим образом снабжена механической захватной рамой, приваренной к раме для замены стержня, при этом механическая захватная рама соединена с зажимным блоком посредством зажимного гидравлического цилиндра, при этом зажимной блок соединен с концом гидравлического цилиндра переноса стержня, а другой конец гидравлического цилиндра переноса стержня шарнирно сочленен с механической захватной рамой; отбойная перегородка включает нижнюю пластину отбойной перегородки, приваренную на задней стороне корпуса роющей машины продольно-осевого типа, скользящая пластина отбойной перегородки расположена с возможностью скольжения на нижней пластине отбойной перегородки посредством рельса скольжения отбойной перегородки, при этом скользящая пластина отбойной перегородки приводится в скольжение с помощью гидравлического цилиндра продвижения и отвода отбойной перегородки, установленного на нижней пластине отбойной перегородки, при этом скользящая пластина отбойной перегородки шарнирно сочленена с первой отбойной перегородкой, выполненной с возможностью наклона вверх и вниз, при этом первая отбойная перегородка приводится в действие с помощью гидравлического цилиндра наклона отбойной перегородки, установленного на скользящей пластине отбойной перегородки, при этом первая отбойная перегородка шарнирно сочленена со второй отбойной перегородкой, участвуя в установке и временном поддержании анкерной решетки, а вторая отбойная перегородка приводится в действие для выравнивания с помощью гидравлического цилиндра выравнивания отбойной перегородки, установленного на первой отбойной перегородке; обнаруживающая часть включает неподвижную направляющую скольжения, закрепленную на корпусе роющей машины продольно-осевого типа, стол для скольжения телескопической штанги, соответствующим образом размещенный на неподвижной направляющей скольжения, при этом стол для скольжения телескопической штанги приводится в скольжение посредством телескопического масляного цилиндра, размещенного на корпусе роющей машины продольно-осевого типа, основание телескопической штанги, размещенное на столе для скольжения телескопической штанги, при этом основание телескопической штанги соединено с большим рычагом посредством первого регулировочного гидравлического цилиндра и второго регулировочного гидравлического цилиндра, при этом большой рычаг соединен с малым рычагом, а малый рычаг соединен с масляным цилиндром вращения посредством соединительного элемента, при этом масляный цилиндр вращения соединен с платформой для скольжения сверлильной машины, обнаруживающую сверлильную машину, размещенную на платформе для скольжения сверлильной машины, и совместный гидравлический цилиндр, используемый для регулировки степени наклона соединительного элемента, соединенный между малым рычагом и соединительным элементом.
[0008] Кроме того, каждый из гидравлического цилиндра наклона анкерующей и поддерживающей части, гидравлического цилиндра двигателя, гидравлического цилиндра выравнивания отбойной перегородки, гидравлического цилиндра наклона отбойной перегородки, гидравлического цилиндра продвижения и отвода отбойной перегородки, масляного цилиндра вращения, совместного гидравлического цилиндра, первого регулировочного гидравлического цилиндра, второго регулировочного гидравлического цилиндра и телескопического масляного цилиндра представляет собой гидравлический сервоцилиндр, а первый роторный двигатель и второй роторный двигатель управляют углом вращения с помощью роторного энкодера.
[0009] Кроме того, передняя часть второй отбойной перегородки снабжена решеткой дугообразной конструкции.
[0010] Кроме того, движение наклона первой отбойной перегородки происходит синхронно с движением выравнивания второй отбойной перегородки.
[0011] Кроме того, амплитуда наклона первой отбойной перегородки составляет от 10 градусов до 80 градусов, а амплитуда регулировки между второй отбойной перегородкой и первой отбойной перегородкой составляет от 120 градусов до 180 градусов.
[0012] В настоящем изобретении также представлен способ применения вышеуказанной системы, в частности, включающий следующие этапы:
[0013] (а) перемещение корпуса роющей машины продольно-осевого типа в секцию тоннеля, открытие передней опоры и задней опоры, размещение анкерной решетки рабочим на второй отбойной перегородке, выполнение первой отбойной перегородкой и второй отбойной перегородкой действия подъема и действия выравнивания под действием двух групп гидравлических цилиндров, продвижение скользящей пластины отбойной перегородки и выполнение отбойной перегородкой временного поддержания;
[0014] (б) перемещение телескопического масляного цилиндра обнаруживающей части, приводя в действие стол для скольжения телескопической штанги для перемещения по неподвижной направляющей скольжения, и последующее приведение в действие основания телескопической штанги для перемещения, так что обнаруживающая сверлильная машина перемещается вперед и назад для выполнения обнаружения, управление масляным цилиндром вращения для приведения во вращение платформы для скольжения сверлильной машины и последующая регулировка диапазона обнаружения обнаруживающей сверлильной машины; регулировка положения большого рычага и последующее приведение в действие малого рычага для регулировки положения путем управления первым регулировочным гидравлическим цилиндром и вторым регулировочным гидравлическим цилиндром для реализации вытягивания или втягивания обнаруживающей сверлильной машины с малой амплитудой; и приведение в действие соединительного элемента для реализации действия наклона путем управления совместным гидравлическим цилиндром, и последующая реализация действия наклона обнаруживающего двигателя и реализация обнаружения обнаруживающей частью;
[0015] (в) после завершения обнаружения, масляный цилиндр вращения и двигатель с коромысловыми рычагами в буровой части с двумя коромысловыми рычагами совместно управляют механизмом с двумя коромысловыми рычагами, когда бурение может выполняться, так что буровая головка начинает бурение секции тоннеля по S-образной форме;
[0016] (г) одновременно с выполнением этапа (б), толкание подающего скользящего блока анкерующей и поддерживающей части для движения вперед на конкретное расстояние с помощью зубчатой рейки, прохождение гидравлического цилиндра наклона анкерующей и поддерживающей части на заданное расстояние и предоставление обратной связи для управления гидравлическим цилиндром наклона анкерующей и поддерживающей части для прекращения прохождения, так что наклонный рельс скольжения поворачивается на конкретный угол; и совместное действие первого роторного двигателя, второго роторного двигателя и гидравлического цилиндра двигателя для того, чтобы положение машины для сверления анкерного стержня изменилось на конкретное положение, и выполнение машиной для сверления анкерного стержня действия по приведению в действие анкерного стержня для поддержания анкерной решетки на верхнем пласте тоннеля;
[0017] (д) после завершения круга бурения секции S-образной формы буровой головкой, второй роторный двигатель анкерующей и поддерживающей части поворачивается против часовой стрелки под конкретным углом, начинает работу автоматический механизм замены стержня, гидравлический цилиндр вращения короба перемещается для приведения во вращение короба для анкерного стержня до угла, ограниченного ограничительным гидравлическим цилиндром, зажимной гидравлический цилиндр приводит в действие зажимной блок для зажатия анкерного стержня, гидравлический цилиндр переноса стержня переносит анкерный стержень в машину для сверления анкерного стержня и зажимной блок ослабевает для приведения в действия следующего анкерного стержня;
[0018] (е) после завершения приведения в действие анкерного стержня на секции анкерующей и поддерживающей частью, перемещение скользящей пластины отбойной перегородки назад, выход скользящей пластины отбойной перегородки из временного поддержания и перемещение подающего скользящего блока вперед для выполнения поддержания анкерным стержнем следующей секции; и
[0019] (ж) возврат буровой головки в исходное положение, перемещение подающего скользящего блока анкерующей и поддерживающей части назад до конца, совместное действие гидравлического цилиндра наклона анкерующей и поддерживающей части, первого роторного двигателя, второго роторного двигателя и гидравлического цилиндра двигателя, возврат анкерующей и поддерживающей части в исходное положение, втягивание передней опоры и задней опоры корпуса роющей машины продольно-осевого типа, и перемещение корпуса роющей машины продольно-осевого типа вперед в следующую секцию тоннеля для повторения действий этапов (а)-(ж).
Полезный эффект
[0020] Полезными эффектами настоящего изобретения являются следующие: Конструкция настоящего изобретения, в которой размещена обнаруживающая часть, является простой, так что обнаружение может выполняться перед сверлением, повышая безопасность и рабочую эффективность. Первый роторный двигатель, второй роторный двигатель и гидравлический цилиндр двигателя вместе образуют запястное соединение наподобие запястья человека, а машина для сверления анкерного стержня является более гибкой в работе и может лучше адаптироваться к сложной рабочей среде скважины, благодаря конструкции защитной пластины, решается проблема расхождения времени рытья, времени поддержания и времени заанкеривания в существующем процессе рытья тоннеля, а также значительно повышается эффективность рытья; и благодаря автоматическому механизму замены стержня, замена стержня и перенос анкерных стержней могут выполняться автоматически, тем самым значительно повышая рабочую эффективность.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0021] Для более ясного описания технических решений в вариантах реализации настоящего изобретения или в уровне техники, ниже будут вкратце приведены сопроводительные чертежи, необходимые для описания вариантов реализации или уровня техники. Очевидно, что на чертежах в нижеследующем описании представлены лишь некоторые варианты реализации настоящего изобретения, и специалист в данной области техники сможет получить другие чертежи, опираясь на эти чертежи, без каких-либо творческих усилий.
[0022] ФИГ. 1 представляет собой блок-схему всей конструкции в соответствии с настоящим изобретением.
[0023] ФИГ. 2 представляет собой конструктивную блок-схему буровой части с двумя коромысловыми рычагами в соответствии с настоящим изобретением.
[0024] ФИГ. 3 представляет собой конструктивную блок-схему анкерующей и поддерживающей части в соответствии с настоящим изобретением.
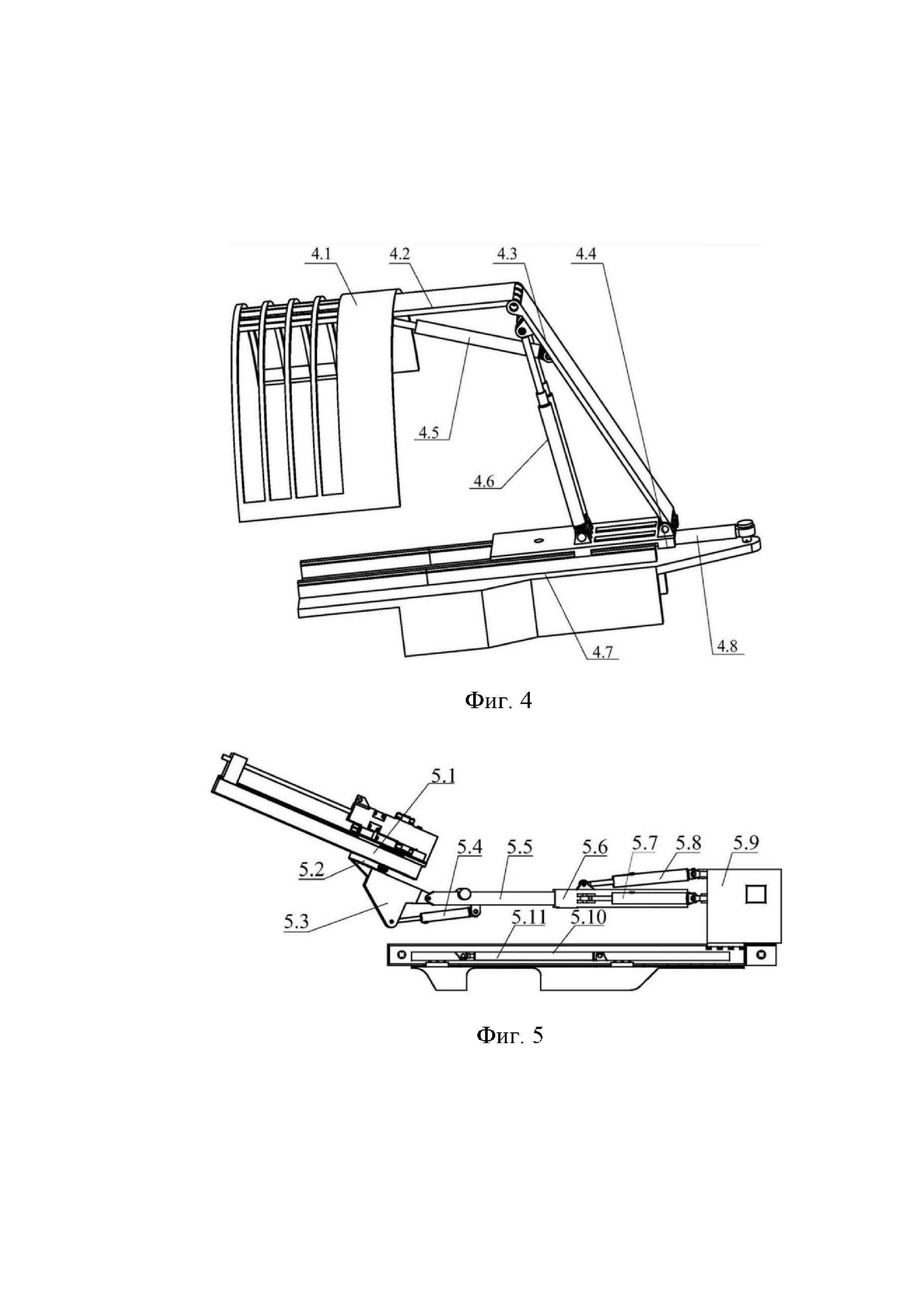
[0025] ФИГ. 4 представляет собой конструктивную блок-схему отбойной перегородки в соответствии с настоящим изобретением.
[0026] ФИГ. 5 представляет собой конструктивную блок-схему обнаруживающей части в соответствии с настоящим изобретением.
[0027] ФИГ. 6 представляет собой блок-схему системы трансмиссии внутри буровой части с двумя коромысловыми рычагами, изображенной на ФИГ. 2.
[0028] ФИГ. 7 представляет собой схематическую структурную диаграмму автоматического механизма замены стержня, изображенного на ФИГ. 3.
[0029] ФИГ. 8 представляет собой схематическую структурную диаграмму механического захвата в автоматическом механизме замены стержня, изображенном на ФИГ. 7.
[0030] На фигурах: 1 корпус роющей машины продольно-осевого типа; 2 буровая часть с двумя коромысловыми рычагами; 2.1 буровой двигатель; 2.2 вторичный коромысловый рычаг; 2.3 первичный коромысловый рычаг; 2.4 двигатель коромыслового рычага; 2.5 масляный цилиндр вращения; 2.6 крепежный кронштейн; 3 анкерующая и поддерживающая часть; 3.1 подающий скользящий блок; 3.2 нижняя пластина анкерующей и поддерживающей части; 3.3 наклонный рельс скольжения; 3.4 наклонный скользящий блок; 3.5 гидравлический цилиндр наклона анкерующей и поддерживающей части; 3.6 первый роторный двигатель; 3.7 гидравлический цилиндр двигателя; 3.8 второй роторный двигатель; 3.9 скользящий блок машины для сверления анкерного стержня; 3.10 автоматический механизм замены анкерного стержня; 3.10.1 короб для анкерного стержня; 3.10.2 гидравлический цилиндр переноса анкерного стержня; 3.10.3 зажимной гидравлический цилиндр; 3.10.4 гидравлический цилиндр вращения короба; 3.10.5 ограничительный гидравлический цилиндр; 3.10.6 рама для замены стержня; 3.10.7 зажимной блок; 3.10.8 механическая захватная рама; 4 отбойная перегородка; 4.1 нижняя пластина отбойной перегородки; 4.2 вторая отбойная перегородка; 4.3 первая отбойная перегородка; 4.4 скользящая пластина отбойной перегородки; 4.5 гидравлический цилиндр выравнивания отбойной перегородки; 4.6 гидравлический цилиндр наклона отбойной перегородки; 4.7 рельс скольжения отбойной перегородки; 4.8 гидравлический цилиндр продвижения и отвода отбойной перегородки; 5 обнаруживающая часть; 5.1 платформа для скольжения сверлильной машины; 5.2 масляный цилиндр вращения; 5.3 соединительный элемент; 5.4 совместный гидравлический цилиндр; 5.5 малый рычаг; 5.6 большой рычаг; 5.7 первый регулировочный гидравлический цилиндр; 5.8 второй регулировочный гидравлический цилиндр; 5.9 основание телескопической штанги; 5.10 стол для скольжения телескопической штанги; и 5.11 телескопический масляный цилиндр.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0031] Далее ясно и полно описаны технические решения вариантов реализации настоящего изобретения со ссылкой на сопроводительные чертежи вариантов реализации настоящего изобретения. Безусловно, описанные варианты реализации являются лишь частью варианта реализации изобретения, а не всеми вариантами реализации. Все другие варианты реализации, полученные специалистом в данной области техники на основе вариантов реализации настоящего изобретения, без творческого труда будут подпадать под объем защиты настоящего изобретения.
[0032] Как показано на ФИГ. 1 - ФИГ. 8, в вариантах реализации представлена обнаруживающая, роющая, поддерживающая, анкерующая и передающая комплексная машинная система для быстрого рытья скважины, а также способ ее применения, причем комплексная машинная система включает корпус 1 роющей машины продольно-осевого типа, при этом на корпусе 1 роющей машины продольно-осевого типа размещена буровая часть 2 с двумя коромысловыми рычагами, анкерующая и поддерживающая часть 3, снабженная автоматическим механизмом замены стержня, отбойная перегородка 4, участвующая во временном поддержании и защите анкерующей и поддерживающей части, и обнаруживающая часть 5 для раннего обнаружения.
[0033] Буровая часть 2 с двумя коромысловыми рычагами включает крепежный кронштейн 2.6 двигателя коромыслового рычага, приваренный на корпусе 1 роющей машины продольно-осевого типа, двигатель 2.4 коромыслового рычага, прикрепленный к крепежному кронштейну 2.6 двигателя коромыслового рычага, при этом двигатель 2.4 коромыслового рычага соединен с первичным коромысловым рычагом 2.3 посредством масляного цилиндра 2.5 вращения, первичный коромысловый рычаг 2.3 соединен со вторичным коромысловым рычагом 2.2 посредством вращательной пары, при этом вращательная пара соединена с двигателем 2.4 коромыслового рычага посредством системы трансмиссии, размещенной в первичном коромысловом рычаге 2.3, буровой двигатель 2.1, размещенный на вторичном коромысловом рычаге 2.2, и буровую головку, установленную на буровом двигателе 2.1; при этом масляный цилиндр 2.5 вращения и двигатель 2.4 коромыслового рычага в буровой части 2 с двумя коромысловыми рычагами совместно управляют механизмом с двумя коромысловыми рычагами таким образом, что буровая головка начинает бурение секции тоннеля по S-образной форме.
[0034] Анкерующая и поддерживающая часть 3 включает нижнюю пластину 3.2 анкерующей и поддерживающей части, приваренную к двум сторонам корпуса 1 роющей машины продольно-осевого типа, при этом нижняя пластина 3.2 анкерующей и поддерживающей части соединена с подающим скользящим блоком 3.1 через рельс скольжения, при этом подающий скользящий блок 3.1 шарнирно сочленен с наклонным рельсом 3.3 скольжения, выполненным с возможностью наклона вверх и вниз, наклонный скользящий блок 3.4 соответствующим образом расположен на наклонном рельсе 3.3 скольжения, при этом наклонный рельс 3.3 скольжения приводится в действие с помощью гидравлического цилиндра 3.5 наклона анкерующей и поддерживающей части, установленного на подающем скользящем блоке 3.1, второй роторный двигатель 3.8, расположенный на наклонном скользящем блоке 3.4, при этом второй роторный двигатель 3.8 шарнирно сочленен с первым роторным двигателем 3.6, гидравлический цилиндр 3.7 двигателя, приводящий в действие первый роторный двигатель 3.6 для наклона вверх и вниз, расположенный на втором роторном двигателе 3.8, и первый роторный двигатель 3.6 соединен с машиной для сверления анкерного стержня через скользящий блок 3.9 машины для сверления анкерного стержня, при этом машина для сверления анкерного стержня скользит относительно скользящего блока 3.9 машины для сверления анкерного стержня посредством зубчатой рейки, автоматический механизм 3.10 замены стержня, размещенный на машине для сверления анкерного стержня, при этом автоматический механизм 3.10 замены стержня включает раму 3.10.6 для замены стержня, приваренную к машине для сверления анкерного стержня, при этом рама 3.10.6 для замены стержня соединена с коробом 3.10.1 для анкерного стержня посредством соединительной пластины, при этом соединительная пластина снабжена гидравлическим цилиндром 3.10.4 вращения короба для приведения во вращение короба 3.10.1 для анкерного стержня и ограничительным гидравлическим цилиндром 3.10.5, соответствующим гидравлическому цилиндру 3.10.4 вращения короба, нижняя часть короба 3.10.1 для анкерного стержня соответствующим образом снабжена механической захватной рамой 3.10.8, приваренной к раме 3.10.6 для замены стержня, при этом механическая захватная рама 3.10.8 соединена с зажимным блоком 3.10.7 посредством зажимного гидравлического цилиндра 3.10.3, при этом зажимной блок 3.10.7 соединен с концом гидравлического цилиндра 3.10.2 переноса стержня, а другой конец гидравлического цилиндра 3.10.2 переноса стержня шарнирно сочленен с механической захватной рамой 3.10.8.
[0035] Отбойная перегородка 4 включает нижнюю пластину отбойной перегородки, приваренную на задней стороне корпуса 1 роющей машины продольно-осевого типа, скользящая пластина 4.4 отбойной перегородки расположена с возможностью скольжения на нижней пластине отбойной перегородки посредством рельса 4.7 скольжения отбойной перегородки, при этом скользящая пластина 4.4 отбойной перегородки приводится в скольжение с помощью гидравлического цилиндра 4.8 продвижения и отвода отбойной перегородки, установленного на нижней пластине отбойной перегородки, скользящая пластина 4.4 отбойной перегородки шарнирно сочленена с первой отбойной перегородкой 4.3, выполненной с возможностью наклона вверх и вниз, первая отбойная перегородка 4.3 приводится в действие с помощью гидравлического цилиндра 4.6 наклона отбойной перегородки, установленного на скользящей пластине 4.4 отбойной перегородки, первая отбойная перегородка 4.3 шарнирно сочленена со второй отбойной перегородкой 4.2, участвуя в установке и временном поддержании анкерной решетки, а вторая отбойная перегородка 4.2 приводится в действие для выравнивания с помощью гидравлического цилиндра 4.5 выравнивания отбойной перегородки, установленного на первой отбойной перегородке 4.3.
[0036] Передняя часть второй отбойной перегородки 4.2 снабжена решеткой 4.1 дугообразной конструкции.
[0037] Движение наклона первой отбойной перегородки 4.3 происходит синхронно с движением выравнивания второй отбойной перегородки 4.2.
[0038] Амплитуда наклона первой отбойной перегородки 4.3 составляет от 10 градусов до 80 градусов, а амплитуда регулировки между второй отбойной перегородкой 4.2 и первой отбойной перегородкой 4.3 составляет от 120 градусов до 180 градусов.
[0039] Обнаруживающая часть 5 включает неподвижную направляющую скольжения, закрепленную на корпусе 1 роющей машины продольно-осевого типа, стол 5.10 для скольжения телескопической штанги, соответствующим образом размещенный на неподвижной направляющей скольжения, при этом стол 5.10 для скольжения телескопической штанги приводится в скольжение посредством телескопического масляного цилиндра 5.11, размещенного на корпусе 1 роющей машины продольно-осевого типа, основание 5.9 телескопической штанги, размещенное на столе 5.10 для скольжения телескопической штанги, при этом основание 5.9 телескопической штанги соединено с большим рычагом 5.6 посредством первого регулировочного гидравлического цилиндра 5.7 и второго регулировочного гидравлического цилиндра 5.8, при этом большой рычаг 5.6 соединен с малым рычагом 5.5, а малый рычаг 5.5 соединен с масляным цилиндром 5.2 вращения посредством соединительного элемента 5.3, при этом масляный цилиндр 5.2 вращения соединен с платформой 5.1 для скольжения сверлильной машины, обнаруживающую сверлильную машину, размещенную на платформе 5.1 для скольжения сверлильной машины, и совместный гидравлический цилиндр 5.4, используемый для регулировки степени наклона соединительного элемента 5.3, соединенный между малым рычагом 5.5 и соединительным элементом 5.3.
[0040] Каждый из гидравлического цилиндра 3.5 наклона анкерующей и поддерживающей части, гидравлического цилиндра 3.7 двигателя, гидравлического цилиндра 4.5 выравнивания отбойной перегородки, гидравлического цилиндра 4.6 наклона отбойной перегородки, гидравлического цилиндра 4.8 продвижения и отвода отбойной перегородки, масляного цилиндра 5.2 вращения, совместного гидравлического цилиндра 5.4, первого регулировочного гидравлического цилиндра 5.7, второго регулировочного гидравлического цилиндра 5.8 и телескопического масляного цилиндра 5.11 представляет собой гидравлический сервоцилиндр, а первый роторный двигатель 3.6 и второй роторный двигатель 3.8 управляют углом вращения с помощью роторного энкодера.
[0041] В вариантах реализации также представлен способ применения вышеуказанной системы, в частности, включающий следующие этапы:
[0042] (а) перемещение корпуса 1 роющей машины продольно-осевого типа в секцию тоннеля, открытие передней опоры и задней опоры, размещение анкерной решетки рабочим на второй отбойной перегородке 4.2, выполнение первой отбойной перегородкой 4.3 и второй отбойной перегородкой 4.2 действия подъема и действия выравнивания под действием двух групп гидравлических цилиндров, продвижение скользящей пластины 4.4 отбойной перегородки и выполнение отбойной перегородкой 4 временного поддержания;
[0043] (б) перемещение телескопического масляного цилиндра 5.11 обнаруживающей части 5, приводя в действие стол 5.10 для скольжения телескопической штанги для перемещения по неподвижной направляющей скольжения, и последующее приведение в действие основания 5.9 телескопической штанги для перемещения, так что обнаруживающая сверлильная машина перемещается вперед и назад для выполнения обнаружения, управление масляным цилиндром 5.2 вращения для приведения во вращение платформы 5.1 для скольжения сверлильной машины и последующая регулировка диапазона обнаружения обнаруживающей сверлильной машины; регулировка положения большого рычага 5.6 и последующее приведение в действие малого рычага 5.5 для регулировки положения путем управления первым регулировочным гидравлическим цилиндром 5.7 и вторым регулировочным гидравлическим цилиндром 5.8 для реализации вытягивания или втягивания обнаруживающей сверлильной машины с малой амплитудой; и приведение в действие соединительного элемента 5.3 для реализации действия наклона путем управления совместным гидравлическим цилиндром 5.4, и последующая реализация действия наклона обнаруживающего двигателя и реализация обнаружения обнаруживающей частью;
[0044] (в) после завершения обнаружения, масляный цилиндр 2.5 вращения и двигатель 2.4 с коромысловыми рычагами в буровой части 2 с двумя коромысловыми рычагами совместно управляют механизмом с двумя коромысловыми рычагами, когда бурение может выполняться, так что буровая головка начинает бурение секции тоннеля по S-образной форме;
[0045] (г) одновременно с выполнением этапа (б), толкание подающего скользящего блока 3.1 анкерующей и поддерживающей части 3 для движения вперед на конкретное расстояние с помощью зубчатой рейки, прохождение гидравлического цилиндра 3.5 наклона анкерующей и поддерживающей части на заданное расстояние и предоставление обратной связи для управления гидравлическим цилиндром 3.5 наклона анкерующей и поддерживающей части для прекращения прохождения, так что наклонный рельс 3.3 скольжения поворачивается на конкретный угол; и совместное действие первого роторного двигателя 3.6, второго роторного двигателя 3.8 и гидравлического цилиндра 3.7 двигателя для того, чтобы положение машины для сверления анкерного стержня изменилось на конкретное положение, и выполнение машиной для сверления анкерного стержня действия по приведению в действие анкерного стержня для поддержания анкерной решетки на верхнем пласте тоннеля;
[0046] (д) после завершения круга бурения секции S-образной формы буровой головкой, второй роторный двигатель 3.8 анкерующей и поддерживающей части 3 поворачивается против часовой стрелки под конкретным углом, начинает работу автоматический механизм 3.10 замены стержня, гидравлический цилиндр 3.10.4 вращения короба перемещается для приведения во вращение короба 3.10.1 для анкерного стержня до угла, ограниченного ограничительным гидравлическим цилиндром 3.10.5, зажимной гидравлический цилиндр 3.10.3 приводит в действие зажимной блок 3.10.7 для зажатия анкерного стержня, гидравлический цилиндр 3.10.2 переноса стержня переносит анкерный стержень в машину для сверления анкерного стержня и зажимной блок 3.10.7 ослабевает для приведения в действия следующего анкерного стержня;
[0047] (е) после завершения приведения в действие анкерного стержня на секции анкерующей и поддерживающей частью 3, перемещение скользящей пластины 4.4 отбойной перегородки назад, выход скользящей пластины 4.4 отбойной перегородки из временного поддержания и перемещение подающего скользящего блока 3.1 вперед для выполнения поддержания анкерным стержнем следующей секции; и
[0048] (ж) возврат буровой головки в исходное положение, перемещение подающего скользящего блока 3.1 анкерующей и поддерживающей части 3 назад до конца, совместное действие гидравлического цилиндра 3.5 наклона анкерующей и поддерживающей части, первого роторного двигателя 3.6, второго роторного двигателя 3.8 и гидравлического цилиндра 3.7 двигателя, возврат анкерующей и поддерживающей части 3 в исходное положение, втягивание передней опоры и задней опоры корпуса 1 роющей машины продольно-осевого типа, и перемещение корпуса 1 роющей машины продольно-осевого типа вперед в следующую секцию тоннеля для повторения действий этапов (а)-(ж). Очевидно, что специалистом в данной области техники могут быть произведены различные модификации и вариации в отношении настоящего изобретения без выхода за рамки сущности и объема настоящего изобретения. Таким образом, если такие модификации и вариации настоящего изобретения попадают в пределы объема формулы настоящего изобретения и ее эквивалентных технологий, то подразумевается, что настоящее изобретение также включает эти изменения и вариации.
Реферат
Предложена обнаруживающая, роющая, поддерживающая, анкерующая и передающая комплексная машинная система для быстрого рытья скважины. Система содержит корпус (1) продольно-осевого типа, на корпусе (1) размещена буровая часть (2) с двумя коромысловыми рычагами, анкерующая и поддерживающая часть (3), отбойная перегородка (4), обнаруживающую часть (5). Буровая часть (2) содержит крепежный кронштейн (2.6), двигатель (2.4). Анкерующая и поддерживающая часть (3) содержит нижнюю пластину (3.2), подающий скользящий блок (3.1), рельс (3.3). Второй роторный двигатель (3.8), первый роторный двигатель (3.6), гидравлический цилиндр (3.7), скользящий блок (3.9). Машина для сверления скользит относительно блока (3.9). Соединительная пластина снабжена цилиндром (3.10.4) и цилиндром (3.10.5), соответствующим цилиндру (3.10.4). Нижняя часть короба (3.10.1) снабжена рамой (3.10.8), приваренной к раме (3.10.6), при этом рама (3.10.8) соединена с блоком (3.10.7) посредством цилиндра (3.10.3). Зажимной блок (3.10.7) соединен с концом цилиндра (3.10.2), а другой конец цилиндра (3.10.2) шарнирно сочленен с рамой (3.10.8). Отбойная перегородка включает нижнюю пластину, приваренную на задней стороне корпуса (1), пластина (4.4) расположена на нижней пластине посредством рельса (4.7), пластина (4.4) приводится в скольжение с помощью цилиндра (4.8), установленного на нижней пластине. Пластина (4.4) шарнирно сочленена с первой перегородкой (4.3), при этом первая перегородка (4.3) приводится в действие с помощью цилиндра (4.6), установленного на пластине (4.4), перегородка (4.3) шарнирно сочленена со второй перегородкой (4.2), участвуя в установке и временном поддержании анкерной решетки, а вторая перегородка (4.2) приводится в действие для выравнивания с помощью цилиндра (4.5), установленного на первой перегородке (4.3). Обнаруживающая часть (5) содержит неподвижную направляющую, закрепленную на корпусе (1), стол (5.10) для скольжения телескопической штанги, размещенный на направляющей скольжения, стол (5.10) приводится в скольжение посредством цилиндра (5.11), размещенного на корпусе (1), основание (5.9) телескопической штанги размещено на столе (5.10), при этом основание (5.9) телескопической штанги соединено с рычагом (5.6) посредством первого цилиндра (5.7) и второго цилиндра (5.8). Большой рычаг (5.6) соединен с малым рычагом (5.5), а малый рычаг (5.5) соединен с цилиндром (5.2) посредством соединительного элемента (5.3), при этом цилиндр (5.2) соединен с платформой (5.1), обнаруживающую сверлильную машину, размещенную на платформе (5.1) для скольжения сверлильной машины, и совместный цилиндр (5.4), используемый для регулировки степени наклона соединительного элемента (5.3), соединенный между рычагом (5.5) и соединительным элементом (5.3). 2 н. и 4 з.п. ф-лы, 8 ил.
Формула
Документы, цитированные в отчёте о поиске
Горнопроходческая машина с анкероустановщиком

Комментарии