Система и способ обнаружения затупленных и изношенных резцов - RU2728647C2
Код документа: RU2728647C2
Чертежи

Описание
Родственные заявки
[0001] Настоящая заявка испрашивает приоритет предварительной заявки США № 62/145,377, поданной 9-ого апреля 2015, все содержимое которой тем самым включено в данный документ.
Уровень техники
[0002] Настоящее изобретение относится к промышленным машинам, таким как, но не ограничиваясь этим, горные машины.
Раскрытие изобретения
[0003] В подземных горных машинах, таких как выемочные комбайны с длинными забоями и горные комбайны непрерывного действия, используется множество резцов, прикрепленных к вращающемуся режущему барабану для добычи (например, среза) горной породы. В процессе среза горной породы резцы могут износиться и/или затупиться, что в свою очередь снижает скорость извлечения горной породы.
[0004] Затупленные или изношенные резцы увеличивают силу, требуемую для среза горной породы, таким образом уменьшая эффективность функционирования. Дополнительно, затупленные или изношенные головки создают увеличенное количество летающей в воздухе пыли и частиц и могут быть катастрофически разрушены, что может нанести серьезный ущерб дополнительному расположенному далее технологическому оборудованию при не обнаружении и не удалении от выходящей горной породы. Как правило, резцы заменяются вовремя перерывов в добыче, и замена основывается на визуальном осмотре. Данный процесс является произвольным и непригодным.
[0005] В одном варианте осуществления настоящего изобретения предложена горная машина, включающая в себя каркас, привод, режущий барабан, поддерживаемый каркасом, причем режущий барабан задействован приводом, резец, соединенный с режущим барабаном, и контроллер. Контроллер включает в себя процессор и запоминающее устройство и выполнен с возможностью измерения характеристики привода, определения того, что резец изношен, на основе измеренной характеристики привода и вывода сигнала, когда определено, что резец изношен.
[0006] В другом варианте осуществления настоящего изобретения предложен способ обнаружения износа резца, задействованного приводом горной машины. Способ включает в себя этапы, на которых наблюдают с помощью датчика за характеристикой привода; определяют, через контроллер, что резец изношен, на основе упомянутой характеристики привода; и выводят, из контроллера, сигнал, когда определено, что резец изношен.
[0007] Другие варианты выполнения настоящего изобретения станут очевидными посредством рассмотрения подробного описания и сопроводительных чертежей.
Краткое описание чертежей
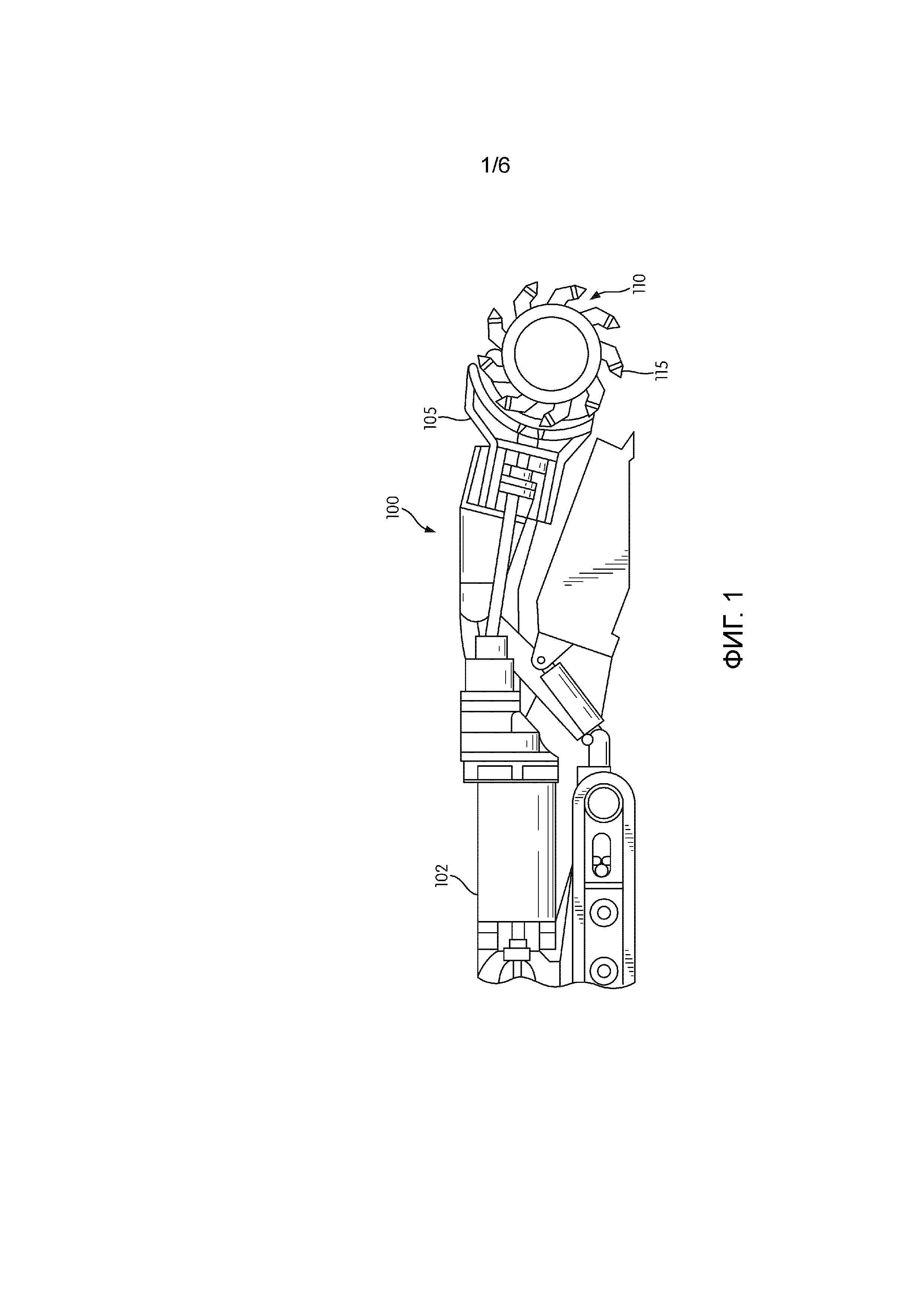
[0008] На Фиг.1 показан вид в перспективе горной машины согласно некоторым вариантам осуществления.
[0009] На Фиг.2 показан вид в перспективе отдельных резцов горной машины с Фиг.1 согласно некоторым вариантам осуществления настоящего изобретения.
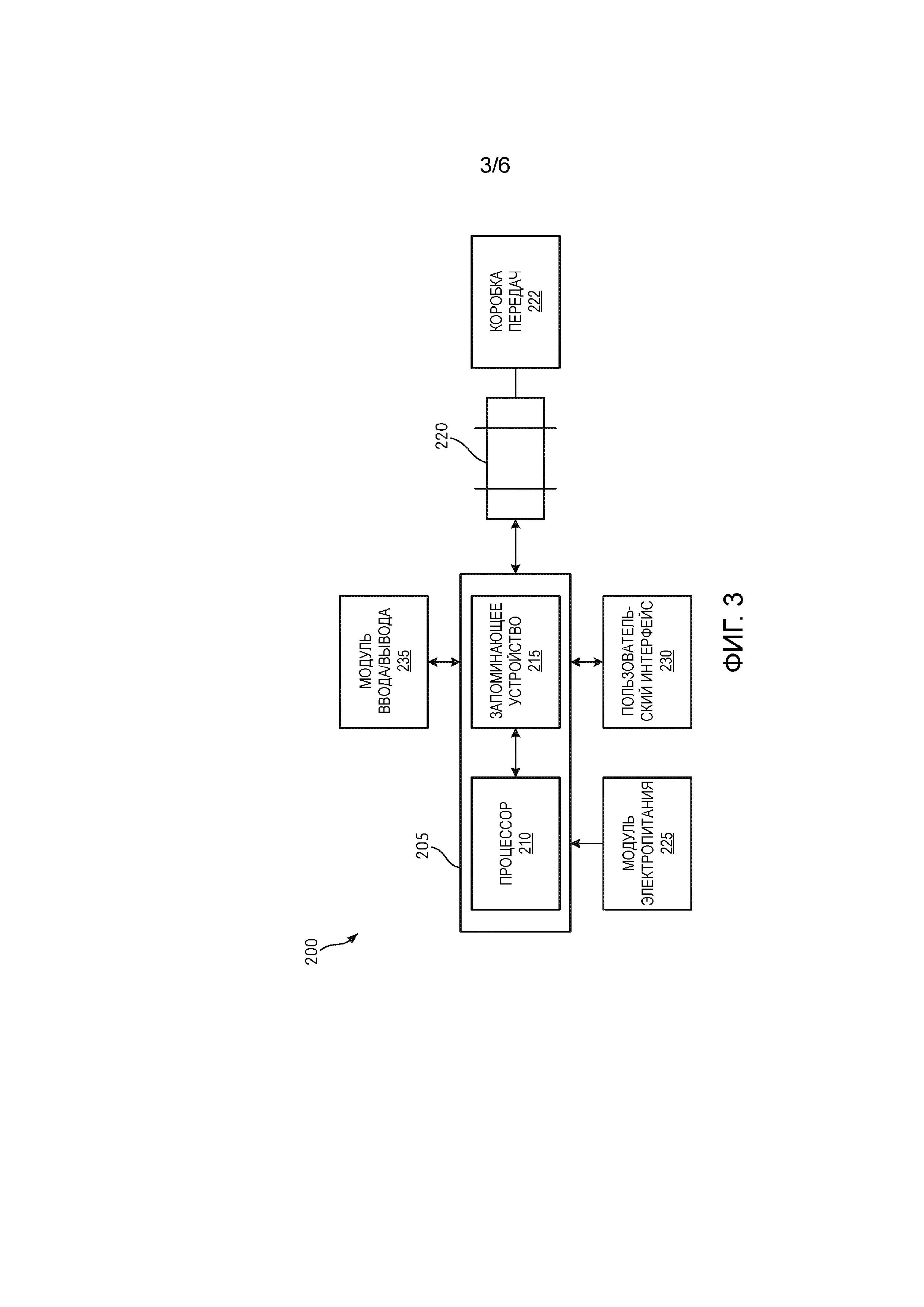
[0010] На Фиг.3 показана блок-схема системы управления горной машины с Фиг.1 согласно некоторым вариантам осуществления настоящего изобретения.
[0011] На Фиг.4 показано множество графиков, используемых системой управления с Фиг.3, согласно некоторым вариантам осуществления настоящего изобретения.
[0012] На Фиг.5 показан график, используемый системой управления с Фиг.3, согласно некоторым вариантам осуществления настоящего изобретения.
[0013] На Фиг.6 показан процесс функционирования системы управления с Фиг.3, согласно некоторым вариантам осуществления настоящего изобретения.
Осуществление изобретения
[0014] Перед привидением подробного объяснения каких-либо вариантов осуществления настоящего изобретения следует понять, что данное изобретение не ограничено в своем применении подробностями выполнения или размещения компонентов, изложенных в последующем описании или изображенных на сопроводительных чертежах. Настоящее изобретение обладает возможностями других вариантов осуществления и может быть осуществлено или выполнено различными способами. Кроме того, следует понимать, что фразеология и терминология используются в данном документе с целью описания, и их не следует расценивать в качестве ограничения. Подразумевается, что использование терминов «включающий в себя», «содержащий» или «имеющий» и их разнообразных форм в данном документе охватывает элементы, перечисленные после них, и их эквиваленты, а также и дополнительные элементы. Пока не указано или не ограничено иным образом, термины «закрепленный», «подсоединенный», «поддерживаемый» и «соединенный» и их разнообразные формы используются широко и охватывают как прямые, так и косвенные крепления, присоединения, поддержки и соединения.
[0015] Кроме того, следует понимать, что варианты осуществления настоящего изобретения могут включать в себя аппаратное обеспечение, программное обеспечение и электронные компоненты или модули, которые, в целях обсуждения, могут быть изображены и описаны, как будто большинство из таких компонентов реализовано исключительно в аппаратном обеспечении. Однако, среднему специалисту в уровне техники, а также на основе прочтения данного подробного описания, будет понятно, что, по меньшей мере в одном варианте осуществления, основанные на электронных схемах аспекты изобретения могут быть реализованы в программном обеспечении (например, сохранены на постоянном считываемом компьютером носителе), исполняемом одним или более блоками обработки, такими как микропроцессор и/или специализированные интегральные схемы (application specific integrated circuit, «ASIC»). Кроме того, следует отметить, что для реализации настоящего изобретения может быть использовано множество основанных на аппаратном и программном обеспечении устройств, а также множество различных структурных компонентов. Например, «серверы» и «вычислительные устройства», описанные в данной спецификации, могут включать в себя один или более блоков обработки, один или более модулей считываемых компьютером носителей, один или более интерфейсов ввода/вывода и различные соединения (например, системную шину), соединяющие упомянутые компоненты.
[0016] На Фиг.1 показана горная машина 100, такая как горный комбайн непрерывного действия. Несмотря на то, что и изображена в качестве горного комбайна непрерывного действия, в других вариантах осуществления (не показаны), горная машина 100 может быть выемочным комбайном с длинными забоями, камнедробилкой или другим типом горной машины. Дополнительно, настоящее изобретение не ограничено горными машинами и может использоваться совместно со множеством устройств, имеющих колеблющиеся диски или буровые головки.
[0017] Горная машина 100 включает в себя раму, или каркас, 102, поддерживающую режущую систему 105, которая включает в себя вращающийся барабан 110 с одним или более резцами 115 для срезания горной породы (например, угля, соли или другой добываемой горной породы) с поверхности, подвергаемой горным работам. Режущая система 105 вращательно задействуется одним или более приводами 220 (Фиг.3) через коробку 222 передач (Фиг.3), которая механически соединяет один или более приводов 220 с вращающимся барабаном 110. То есть, коробка 222 передач (Фиг.3) принимает выходную мощность от упомянутого одного или более приводов 220 и, в свою очередь, задействует барабан 110. Резцы 115 соединены с возможностью замены с барабаном 110.
[0018] На Фиг.2 показаны отдельные резцы 115. Каждый резец 115 включает в себя основание 120 и коронку, или головку, 125. Основание 120 соединяет с возможностью последующего отсоединения резец 115 с барабаном 110. Коронка 125 входит в зацепление с горной породой (то есть, коронка 125 проталкивается через локальный шов для извлечения горной породы). В любой момент времени множество коронок 125 могут входить в зацепление с горной породой.
[0019] На Фиг.3 показана блок-схема, изображающая систему 200 управления, привод 220 и коробку 222 передач, горной машины 100. Система 200 управления включает в себя контроллер 205, обладающий сочетанием аппаратного обеспечения и программного обеспечения, которые выполнены с возможностью, среди прочего, управления функционированием горной машины 100 и функционированием системы 200 управления. Например, контроллер 205 включает в себя процессор 210 и запоминающее устройство 215. Контроллер 205 электрически и/или с возможностью осуществления связи соединен со множеством модулей или компонентов горной машины 100, такими как, но не ограничиваясь этим, модуль 225 электропитания, пользовательский интерфейс 230 и модуль 235 ввода/вывода (I/O). В некоторых вариантах осуществления контроллер 205 дополнительно электрически и/или с возможностью осуществления связи соединен с одним или более приводами 220.
[0020] В некоторых вариантах осуществления контроллер 205 включает в себя множество электрических и электронных компонентов, которые предоставляют мощность, функциональное управление и защиту компонентам и модулям внутри контроллера 205 и/или горной машины 100. Например, контроллер 205 включает в себя, среди прочего, процессор 210 (например, микропроцессор, микроконтроллер или другое подходящее программируемое устройство) и запоминающее устройство 215. Процессор 210 и запоминающее устройство 215, а также различные модули, соединенные с контроллером 205, соединены посредством одной или более шин управления и/или данных. В некоторых вариантах осуществления контроллер 205 реализован частично или полностью на полупроводниковой (например, полупроводнике программируемой вентильной матрицы [field-programmable gate array, «FPGA»]) микросхеме, такой как микросхема, разработанная через процесс проектирования на уровне (register transfer level «RTL») межрегистровых пересылок.
[0021] Запоминающее устройство 215 включает в себя, например, область хранения программы и область хранения данных. Область хранения программы и область хранения данных могут включать в себя сочетание различных типов запоминающих устройств, таких как постоянное запоминающее устройство (read-only memory, «ROM»), запоминающее устройство (random access memory, «RAM») с произвольным доступом (например, динамическое RAM [dynamic RAM, «DRAM»], синхронное DRAM [synchronous DRAM, «SDRAM»], и т.д.), электрически стираемое программируемое постоянное запоминающее устройство (electrically erasable programmable read-only memory, «EEPROM»), флэш-память, жесткий диск, SD-карту или другие подходящие магнитные, оптические, физические или электронные запоминающие устройства. Процессор 210 соединен с запоминающим устройством 215 и исполняет команды программного обеспечения, которые выполнены с возможностью хранения в RAM запоминающего устройства 215 (например, в течение исполнения), ROM запоминающего устройства 215 (например, в целом на постоянной основе) или другом постоянном считываемом компьютером носителе, таком как другое запоминающее устройство или диск. Программное обеспечение, включенное в вариант реализации горной машины 100, может быть сохранено в запоминающем устройстве 215 контроллера 205. Программное обеспечение включает в себя, например, встроенное микропрограммное обеспечение, одно или более приложений, данные программы, фильтры, правила, один или более программных модулей и другие исполняемые команды. Контроллер 205 выполнен с возможностью извлечения из запоминающего устройства 215 и исполнения, среди прочего, команд, относящихся к процессам и способам управления, описанным в данном документе. В других вариантах выполнения контроллер 205 включает в себя дополнительные, меньшего количества или другие компоненты.
[0022] Как указано выше, контроллер 205 дополнительно с возможностью осуществления связи соединен с одним или более приводами 220. Привод 220 вращательным образом задействует режущую систему 105 через коробку 222 передач. Привод 220 может быть любым приводом, который прикладывает силу (например, вращающую силу, линейную силу и т.д.). В одном варианте осуществления привод 220 является двигателем, таким как, но не ограничиваясь этим, двигателем переменного тока (AC) (например, синхронным двигателем, асинхронным двигателем переменного тока и т.д.), двигателем постоянного тока (например, коллекторным двигателем постоянного тока, магнитоэлектрическим двигателем постоянного тока, двухобмоточным двигателем постоянного тока и т.д.) и реактивным двигателем стрелочного электропривода или другим типом реактивных двигателей. В другом варианте осуществления привод 220 является гидравлическим двигателем, таким как, но не ограничиваясь этим, линейный гидравлический двигатель (то есть, гидравлические цилиндры) или радиальный поршневой гидравлический двигатель. В некоторых вариантах осуществления горная машина 100 включает в себя множество приводов 220 для приведения в действие различных аспектов горной машины 100. В таком варианте осуществления приводы 220 могут представлять собой сочетание электродвигателей переменного тока, электродвигателей постоянного тока и гидравлических двигателей. Например, но не ограничиваясь этим, электродвигатель переменного тока или электродвигатель постоянного тока могут вращательным образом задействовать режущую систему 105, в то время как гидравлический двигатель реагирует на нагрузки при резании и устанавливает в заданное положение режущую систему 105.
[0023] Модуль 225 электропитания подает номинальное напряжение переменного тока или постоянного тока в контроллер 205 или другие компоненты или модули горной машины 100. Электропитание в модуль 225 электропитания подается, например, от источника энергии, имеющего номинальные напряжения сети. Модуль 225 электропитания также выполнен с возможностью подачи низких напряжений для приведения в действие схемы и компоненты внутри контроллера 205 и/или горной машины 100. В других вариантах осуществления электропитание в контроллер 205 или другие компоненты и модули внутри горной машины 100 подается независимым от сети источником энергии (например, генератором, солнечной панелью, батареей и т.д.).
[0024] Пользовательский интерфейс 230 используется для управления или наблюдения за горной машиной 100. Пользовательский интерфейс 230 включает в себя сочетание устройств цифрового и аналогового ввода или вывода, необходимых для достижения желаемого уровня управления и наблюдения за горной машиной 100. Например, пользовательский интерфейс 230 включает в себя устройство отображения (например, первичное устройство отображения, вторичное устройство отображения и т.д.) и устройства ввода, такие как устройства отображения с сенсорным экраном, множество рукояток управления, циферблатов, переключателей, кнопок и т.д. Устройство отображения является, например, жидкокристаллическим устройством (liquid crystal display, «LCD») отображения, светодиодным (light-emitting diode, «LED») устройством отображения, органическим светодиодным («LED») устройством (organic LED, «OLED») отображения, электролюминесцентным устройством (electroluminescent display, «ELD») отображения, устройством (surfaceconduction electron-emitter display, «SED») отображения электронного излучателя поверхностной электропроводности, полевым эмиссионным устройством (field emission display, «FED») отображения, жидкокристаллическим устройством отображения на тонкопленочных транзисторах (thin-film transistor, «TFT») и т.д. Пользовательский интерфейс 230 может также быть выполнен с возможностью отображения состояний или данных, связанных с горной машиной 100 в реальном времени или по существу в реальном времени. Например, пользовательский интерфейс 230 выполнен с возможностью отображения измеренных электрических характеристик горной машины 100 и статус горной машины 100. В некоторых вариантах реализации управление пользовательским интерфейсом 230 осуществляется совместно с одним или более индикаторами (например, светодиодами (LED), громкоговорителями и т.д.) для предоставления визуальных или слуховых указаний о статусе или состояниях горной машины 100.
[0025] Модуль 235 ввода/вывода выполнен с возможностью ввода и вывода данных от контроллера 205 во внешнее(ие) устройство(а). Как обсуждено более подробно ниже, модуль 235 ввода/вывода может вводить и выводить данные беспроводным образом или проводным образом. В некоторых вариантах осуществления, хотя и не изображенных, модуль 235 ввода/вывода может быть соединен с возможностью осуществления связи с сетевым модулем. Сетевой модуль выполнен с возможностью соединения с сетью и осуществления связи через нее. В некоторых вариантах осуществления сеть является, например, глобальной сетью (wide area network, «WAN») (например, сетью на основе TIP/IP, сотовой сетью, такой как, например, сеть Глобальной Системы Мобильной Связи [Global System for Mobile Communications, «GSM»], сеть Услуги Пакетной Радиосвязи Общего Назначения [General Packet Radio Service, «GPR»], сеть Множественного Доступа с Кодовым Разделением [Code Division Multiple Access, «CDMA»], сеть Эволюционировавшей Оптимизированной Передачи Данных [Evolution-Data Optimized, «EV-DO»], сеть Развития Стандарта GSM с Увеличенной Скоростью Передачи Данных [Enhanced Data Rates for GSM Evolution, «EDGE»], сеть 3GSM, сеть 4GSM, сеть Усовершенствованной Цифровой Беспроводной Связи [Digital Enhanced Cordless Telecommunications, «DECT»], сеть Цифровой AMPS [«IS-136/TDMA»] или сеть Встроенной Цифровой Усовершенствованной Сети [Integrated Digital Enhanced Network «iDEN»] и т.д.).
[0026] В других вариантах осуществления сеть является, например, местной сетью («LAN»), сетью по соседству (neighborhood area network, «NAN»), домашней сетью (home area network, «HAN») или персональной сетью («PAN»), использующей любое множество протоколов связи, таких как Wi-Fi, Bluetooth, ZigBee и т.д. Связь через сеть посредством сетевого модуля или контроллера 205 может быть защищена с использованием одной или более методик шифрования, таких как методики, предоставленные в стандарте IEEE 802.1 для основанной на портах безопасности сети, предварительно совместно используемые ключи, Расширяемый Протокол Аутентификации (Extensible Authentication Protocol, «EAP»), Аналогичная Проводной Защита (Wired Equivalency Privacy «WEP»), Протокол Ограниченной во Времени Целостности Ключа (Temporal Key Integrity Protocol «TKIP»), Защищенный Доступ по Wi-Fi (Wi-Fi Protected Access, «WPA») и т.д. Соединения между сетевым модулем и сетью являются, например, проводными соединениями, беспроводными соединениями или сочетанием беспроводных и проводных соединений. Схожим образом соединения между контроллером 205 и сетью или сетевым модулем являются проводными соединениями, беспроводными соединениями или сочетанием проводных и беспроводных соединений. В некоторых вариантах осуществления контроллер 205 или сетевой модуль включает в себя один или более портов связи (например, Ethernet, последовательное подключение [serial advanced technology attachment, «SATA»] по усовершенствованной технологии, универсальная последовательная шина [universal serial bus, «USB»], встроенный интерфейс накопителей [integrated drive electronics «IDE»], и т.д.) для передачи, приема или хранения данных, связанных с горной машиной 100 или функционированием горной машины 100.
[0027] При функционировании с вращением барабана 110 отдельные коронки 125 приводятся в зацепление с забоем для извлечения подлежащей добыче горной породы. Сила прикладывается к отдельным коронкам 125 для поддержания зацепление с горной породой и поддержания перемещения через горную породу. В любой момент времени, множество коронок 125 могут быть введены в зацепление с горной породой. Силы отдельной коронки 125, вошедшей в зацепление с горной породой объединяются для создания результирующей режущей силы. Результирующая режущая сила и вращающий момент одного или более приводов 220 (например, вращающий момент на вращающемся барабане 110) объединяются для создания нагрузки при резании горной машины 100.
[0028] В течение времени осуществляется наблюдение за результирующими режущими силами (например, уровнем и разбросом результирующих режущих сил), вращающим моментом одного или более приводов 220 (например, уровнем и разбросом вращающего момента вращающегося барабана 110) и производительностью горной машины 100 (то есть, количеством горной породы, добытой горной машиной 100 в течение предварительно определенного периода времени). Изменения в нагрузках при резании (например, результирующие режущие силы и вращающий момент) и производительности могут затем использоваться для обнаружения затупленных или отсутствующих коронок 125.
[0029] В некоторых вариантах осуществления за нагрузками при резании (например, результирующими режущими силами и вращающим моментом вращающегося барабана 110) может осуществляться наблюдение через считывание напряжения и тока привода, или приводов, 220. В другом варианте осуществления за нагрузками при резании может осуществляться наблюдение через считывание напряжения и тока приводов и считывание давления гидравлической системы. В таких вариантах осуществления основанный на моделировании оценщик инвертирует системную динамику для предоставления возможности количественного представления нагрузок при резании из считанных измерений напряжения, тока и/или давления.
[0030] Количественное представление нагрузок при резании может затем быть усреднено в реальном времени, прослежено в течение предварительно определенных периодов времени и сравнено с производительностью горной машины 100. Затупленные или изношенные коронки 125 могут быть обнаружены посредством наблюдения за: (1) изменениями в соотношении между нагрузками при резании и производительностью по сравнению с данными, полученными в течение последнего функционирования горной машины 100; и (2) изменениями в соотношении между нагрузками при резании (например, между средним вращающим моментом и поперечиной, или вертикальной режущей силой, на режущей системе 105). В данном документе термины «затупленный» или «изношенный» могут быть определены в качестве предварительно определенной величины износа коронки 125. Например, но не ограничиваясь этим, затупление или износ могут быть определены в качестве предварительно определенного расстояния повреждения на коронке 125. В качестве другого примера, но не ограничиваясь этим, затупление или износ могут быть определены в качестве предварительно определенного процента повреждения на коронке 125.
[0031] В некоторых вариантах осуществления для содействия точному измерению угла поворота режущей системы 105 по отношению к заданному опорному углу на горной машине 100 (например, каркасу 102) используется круговой датчик положения. В таком варианте осуществления нагрузки при резании оцениваются в реальном времени, и мгновенные нагрузки при резании соотносятся с углом режущей системы 105. Отклонения между кривыми нагрузок при резании (например, силами и вращающим моментом относительно угла режущей системы 105) и кривыми основной линии нагрузки при резании указывают на затупленные или отсутствующие коронки 125. Известная схема набора коронок режущей системы 105 используется для определения наиболее вероятного сочетания коронок 125, которые являются затупленными или отсутствующими, для создания наблюдаемого отклонения от кривой основной линии нагрузки при резании.
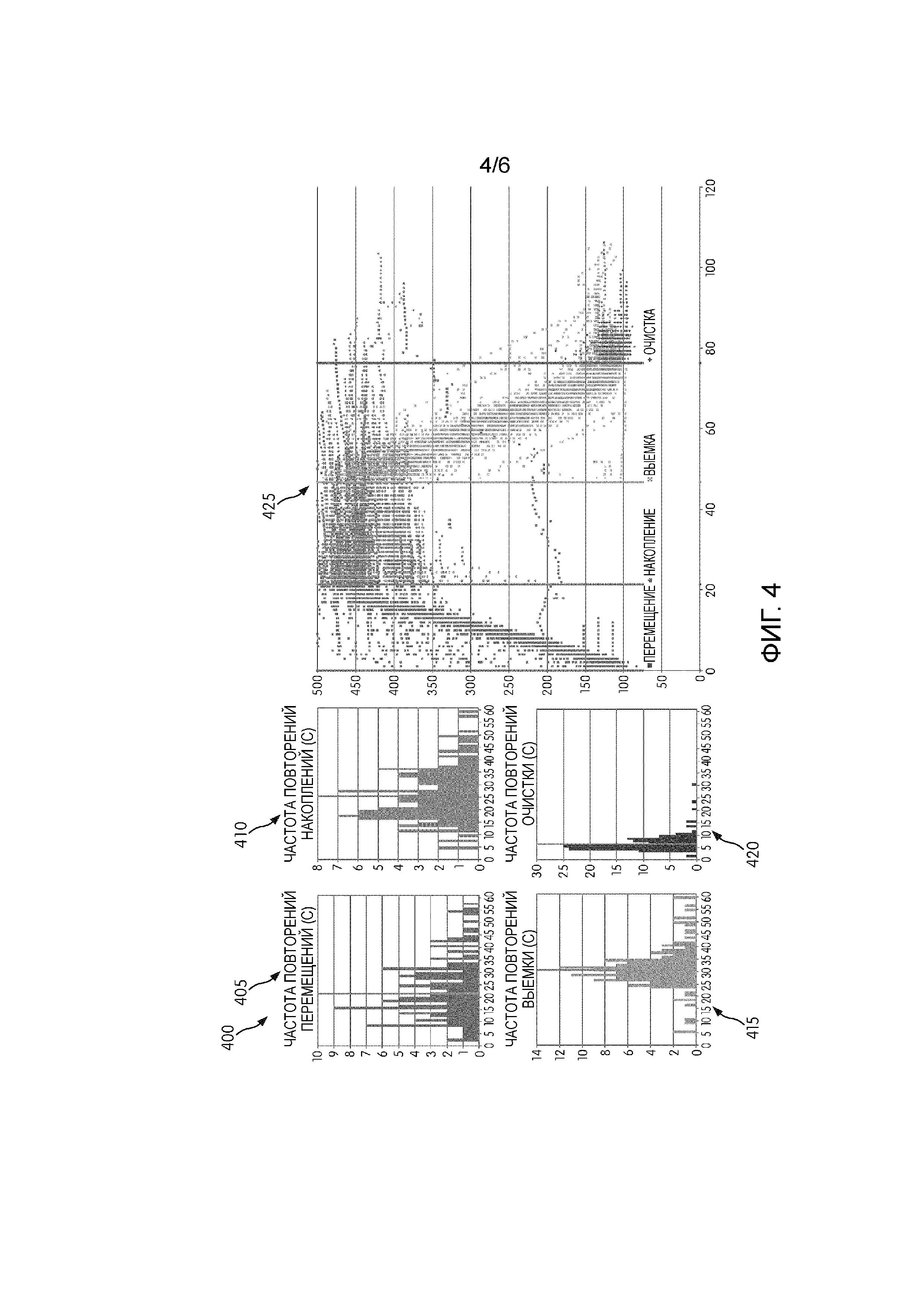
[0032] На Фиг.4 показано множество графиков 400 частоты повторений стадии. На графиках 400 частоты повторений стадии графически показана рабочая характеристика горной машины 100 в течение функционального состояния (например, функционального цикла). В некоторых вариантах осуществления рабочая характеристика горной машины 100 определена посредством количества времени, которое горная машина 100 затрачивает на завершение функционального состояния. Графически изображенные точки графиков 400 частоты повторений стадии могут изменяться в последующих функциональных состояниях с изменением рабочей характеристики горной машины 100 и/или окружения.
[0033] В одном варианте осуществления функционирования графики 400 частоты повторений стадии используются для измерения производительности в течение функционального состояния. В таком варианте осуществления графики 400 частоты повторений стадии могут использоваться в анализе изменений соотношения между нагрузками при резании и производительностью, как описано выше.
[0034] В некоторых вариантах осуществления на графиках 400 частоты повторений стадии показаны гистограммы частот повторений в течение каждой стадии функционального состояния. В некоторых вариантах осуществления частота повторений является количеством возникновений повторяющегося события, такого как, но не ограничиваясь этим, некоторая стадия функционального состояния в единицу времени. В таком варианте осуществления функциональное состояние может включать в себя следующие стадии: перемещение; накопление; выемка; обрезка; и поднятие головной части.
[0035] В изображенном варианте осуществления множество графиков 400 частоты повторений стадии включают в себя график 405 частоты повторений перемещений, график 410 частоты повторений накоплений, график 415 частоты повторений выемки, график 420 частоты повторений очистки (C/UP) и объединенный график 425, графики частоты повторений стадии могут включать в себя более или менее. Перемещение, накопление, выемка и очистка являются примерами стадий горной машины 100 в течение функционального состояния.
[0036] Оценки нагрузки при резании в реальном времени вводятся в алгоритм фильтрации. Алгоритм фильтрации использует известную схему набора коронок режущей системы 105 и моделирование силы режущего действия коронок 125 для оценивания процента износа отдельных коронок 125. Алгоритм фильтрации одновременно оценивает угол зацепления между режущей системой 105 и швом, а также параметром износа для каждой коронки 125. Наблюдение за уровнем износа коронки 125 осуществляется относительно предварительно определенной пороговой величины. Когда уровень износа коронки 125 превосходит предварительно определенную пороговую величину, настает время для замены коронки 125.
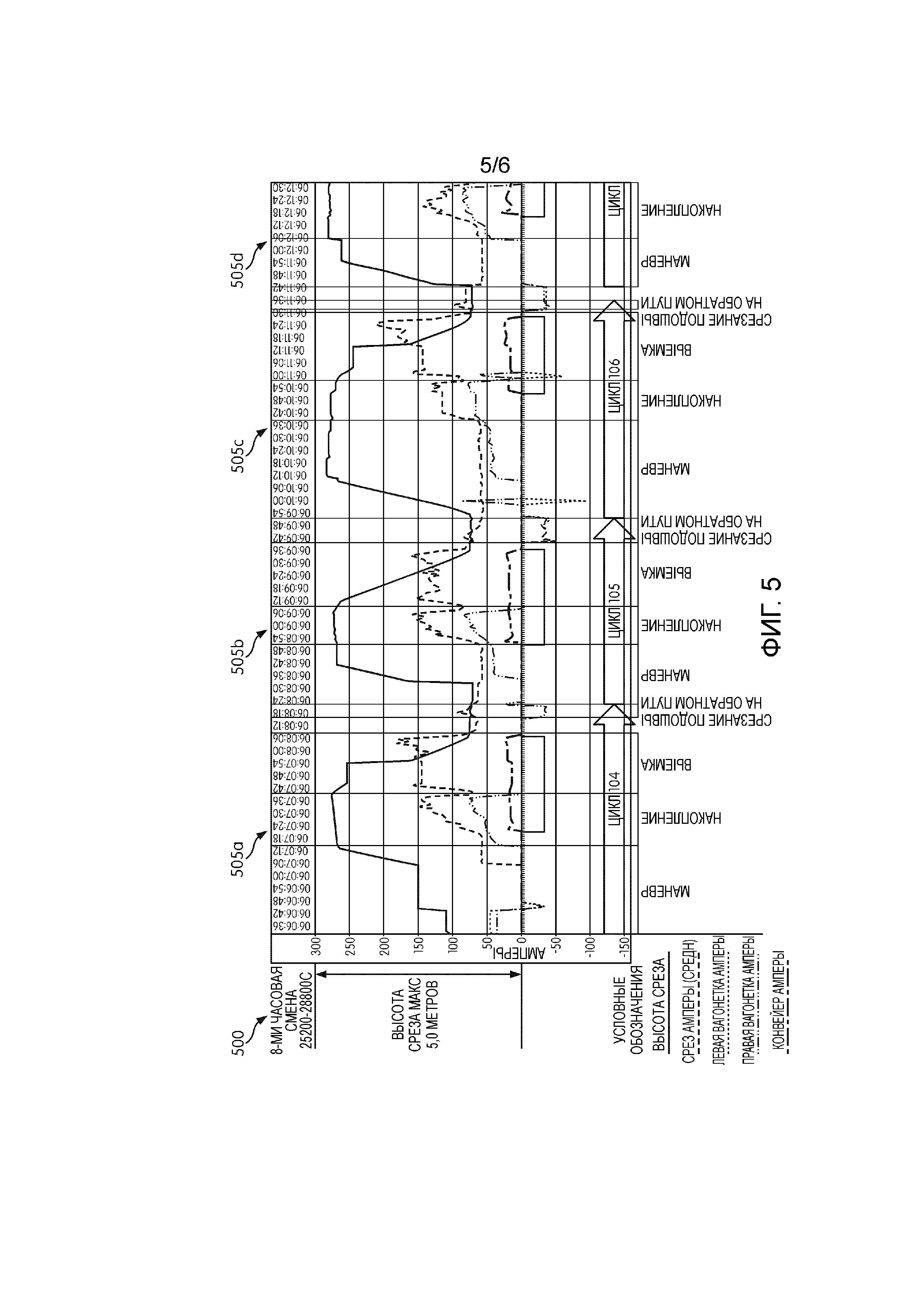
[0037] На Фиг.5 показан график 500, который графически представляет собой количество энергии, использованной множеством компонентов горной машины 100 в течение некоторого периода времени. В некоторых вариантах осуществления этот период времени включает в себя множество функциональных состояний. В одном варианте осуществления энергия графически представлена током (A) на протяжении одного или более функциональных состояний (например, циклов 505a, 505b, 505c, 505d резания). В некоторых вариантах осуществления ток (A) используется в качестве посредника для использования энергии горной машины 100. В таком варианте осуществления ток (A) графически показан относительно подъема режущей системы 105 и текущего функционального состояния. Текущее функциональное состояние горной машины 100 может затем использоваться в качестве основания для сравнения производительности со средними нагрузками при резании, как обсуждено выше.
[0038] В некоторых вариантах осуществления каждое функциональное состояние включает в себя события (например, стадии), такое как: перемещение (маневр); накопление; выемка; обрезка; и подъем головной части. В других вариантах осуществления каждое функциональное состояние может включать в себя более или менее событий. В некоторых вариантах осуществления график 500 дополнительно включает в себя другую деятельность горной машины 100. В таком варианте осуществления другая деятельность может включать в себя, но не ограничиваться этим: полунакопление в течение циклов, время простоя в течение циклов, перебазирование горной машины 100 и общая очистка подошвы.
[0039] На Фиг.6 показана блок-схема последовательности операций, изображающей процесс 600 функционирования горной машины 100 согласно некоторым вариантам осуществления настоящего изобретения. Следует понимать, что порядок этапов, раскрытых в процессе 600, может быть изменен. Кроме того, к данной последовательности могут быть добавлены дополнительные этапы, и не все этапы могут быть необходимыми.
[0040] На этапе 605 система 200 управления, или контроллер 205, осуществляет наблюдение за некоторой характеристикой одного или более приводов 220. Система 200 управления, или контроллер 205, затем определяет, затуплен или изношен ли один или более резцов, на основе наблюдаемой характеристики (этап 610). Когда система 200 управления, или контроллер 205, определяет, что один или более резцов затуплены или изношены, то выводится сигнал (этап 620). Когда система 200 управления, или контроллер 205, определяет, что по меньшей мере один резец не затуплен или не изношен, то процесс 600 циклически возвращается обратно на этап 605 и продолжает наблюдать за характеристикой одного или более приводов 220.
[0041] Таким образом, настоящее изобретение предоставляет, среди прочего, систему и способ обнаружения затупленных и изношенный резцов с использованием результирующих режущих сил, вращающего момента и производительности. Система и способ могут использоваться со множеством горных машин или множеством устройств, имеющих колеблющиеся диски или буровые головки.
Реферат
Группа изобретений относится к промышленным машинам, таким как горные машины. Технический результат – обнаружение затупленных и изношенных резцов. Горная машина содержит каркас, привод, режущий барабан, поддерживаемый каркасом, причем режущий барабан задействован приводом, резец, соединенный с режущим барабаном, и контроллер, имеющий процессор и запоминающее устройство. Причем контроллер выполнен с возможностью определения угла вращения режущего барабана, определения результирующей режущей силы на основе угла вращения режущего барабана, определения износа резца на основе результирующей режущей силы и вывода сигнала, когда определено, что резец изношен. 2 н. и 14 з.п. ф-лы, 6 ил.
Комментарии