Усовершенствованный настольный миксер - RU2635794C2
Код документа: RU2635794C2
Чертежи













Описание
Область техники
Изобретение относится к кухонному оборудованию, в частности, к кухонному оборудованию с электроприводом.
Изобретение разработано, главным образом, для использования в настольном миксере и будет описано далее со ссылкой на такой аппарат. Однако очевидно, что изобретение не ограничивается этой конкретной областью использования.
Задача изобретения
Задачей изобретения является преодоление или ослабление по меньшей мере одного из недостатков предшествующего уровня техники или обеспечение полезного альтернативного варианта.
Задачей изобретения в предпочтительной форме является разработка взбивающего приспособления со скребком для смешивающего устройства.
Задачей изобретения в предпочтительной форме является разработка устройства, потребляющего энергию привода настольного миксера.
Задачей изобретения в предпочтительной форме является разработка блока управления электродвигателем настольного миксера.
Раскрытие изобретения
Первым объектом изобретения является взбивающее приспособление со скребком, содержащее венчик с множеством проволочных взбивающих элементов и скребок.
Скребок может содержать одно или несколько плеч, каждое из которых имеет лопасть. Скребок может содержать пару плеч. Элементы скребка могут быть соединены перемычками.
Скребок и венчик могут быть соединены между собой с возможностью разъединения. В частности, скребок и венчик связаны между собой разъемным соединением, образуя взбивающее приспособление со скребком.
Взбивающее приспособление со скребком может содержать соединительный узел, который может быть разъемно присоединен к настольному миксеру. Соединительный узел может быть выполнен в виде байонетного соединения.
Кроме операций, которые относятся исключительно к настольному миксеру, приспособление может быть использовано также и для взбивания.
Другим объектом изобретения является устройство, потребляющее мощность привода, которое содержит соединительный элемент для сцепления с соединительным элементом привода и элементы конструкции, позволяющие распознать ориентацию устройства для задания режима работы.
Элементы конструкции включают в себя один или несколько выступающих штифтов, обеспечивающих определение ориентации механическими средствами для задания предпочтительного режима работы. Элементы конструкции могут быть расположены по окружности на кольце, выполненном с возможностью вращения и выбора положения.
Элементы конструкции могут включать в себя один или несколько магнитных элементов, обеспечивающих пассивное определение положения для задания режима работы.
Устройство, потребляющее мощность привода, может содержать основную часть, и может быть выполнено в виде одной из следующих насадок: мясорубки, экструдера для колбасы или экструдера для макарон. Устройство может содержать соединительный элемент, выполненный с возможностью разъемного соединения с приводным валом настольного миксера.
Другим объектом изобретения является устройство управления питанием электродвигателя в миксере, содержащее обрабатывающий элемент, выполненный с возможностью:
доступа к данным, указывающим интервал значений подводимой к электродвигателю мощности для каждой из множества скоростей, доступных для выбора пользователем;
отслеживания скорости электродвигателя и сравнения этой скорости с выбранной пользователем скоростью; и
увеличения подводимой к электродвигателю мощности до соответствующего интервала значений, если текущая скорость меньше выбранной пользователем.
Другим объектом изобретения является способ управления питанием электродвигателя кухонного электроприбора, включающий в себя этапы, на которых:
задают данные, указывающие интервал значений подводимой к электродвигателю мощности для каждой из множества скоростей, доступных для выбора пользователем;
определяют скорость электродвигателя и сравнивают ее с выбранной пользователем скоростью;
если текущая скорость меньше выбранной пользователем, увеличивают подводимую к электродвигателю мощность до соответствующего интервала значений.
Способ или устройство управления питанием электродвигателя используется в настольном миксере. Более предпочтительно способ или устройство управления питанием электродвигателя могут быть реализованы в виде программного модуля. Наиболее предпочтительно способ или устройство управления питанием электродвигателя используется в настольном миксере.
Краткое описание чертежей
На фиг. 1А-1D показано взбивающее приспособление со скребком в соответствии с одним из вариантов осуществления изобретения;
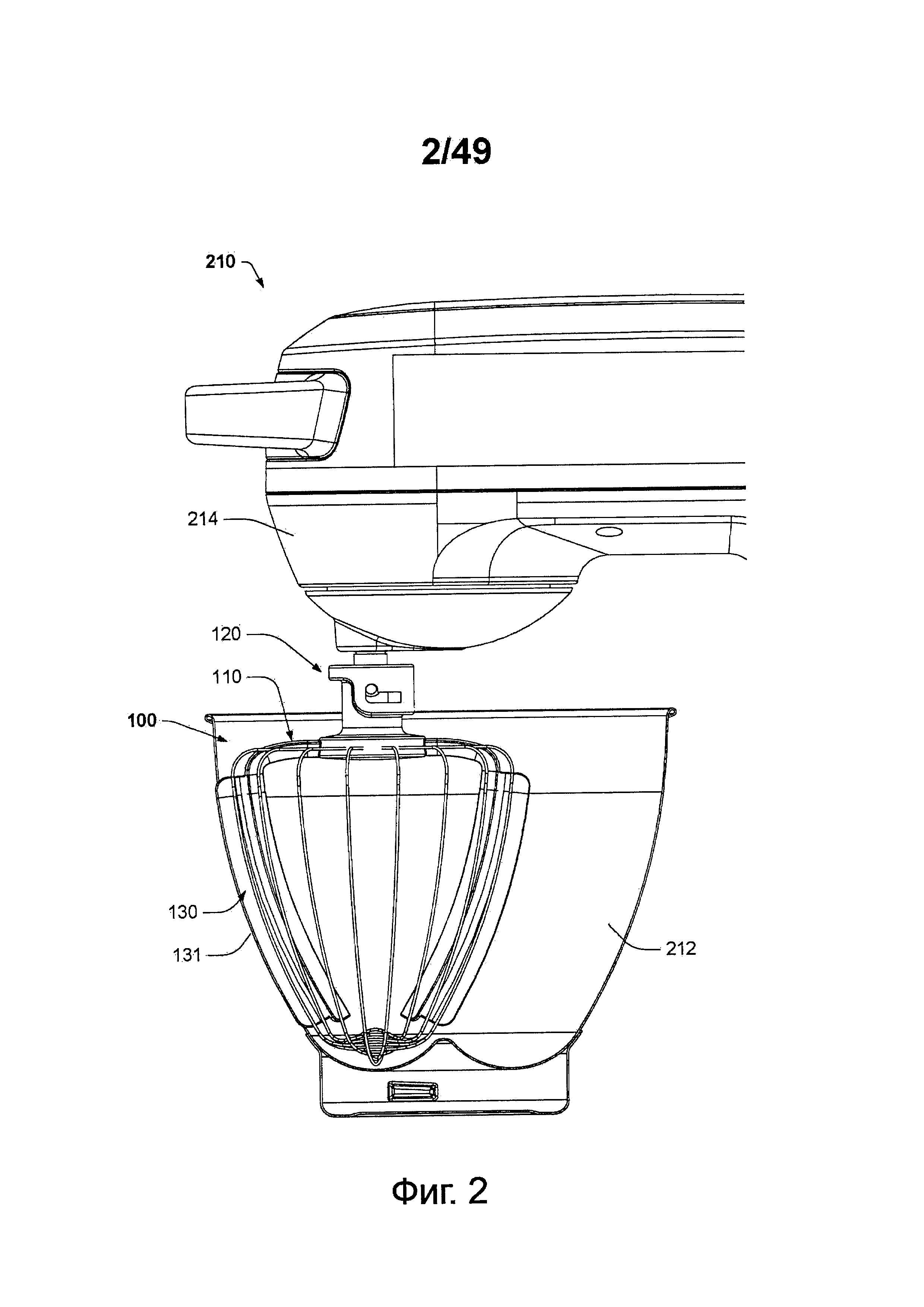
на фиг. 2 - взбивающее приспособление со скребком, показанное на фиг. 1А, используемое в настольном миксере, вид сбоку;
на фиг. 3А-7D - взбивающее приспособление со скребком в соответствии с разными вариантами осуществления изобретения;
на фиг. 8 - взбивающее приспособление со скребком в соответствии с одним из вариантов осуществления изобретения, вид сбоку;
на фиг. 9А-9G - взбивающее приспособление со скребком в соответствии с одним из вариантов осуществления изобретения;
на фиг. 10А-10В - устройство, потребляющее мощность привода, в соответствии с одним из вариантов осуществления изобретения;
на фиг. 11А-11С - варианты ориентации устройства, потребляющего мощность привода;
на фиг. 12А-12В - насадка в виде экструдера для макарон;
на фиг. 13А-13В - насадка в виде мясорубки;
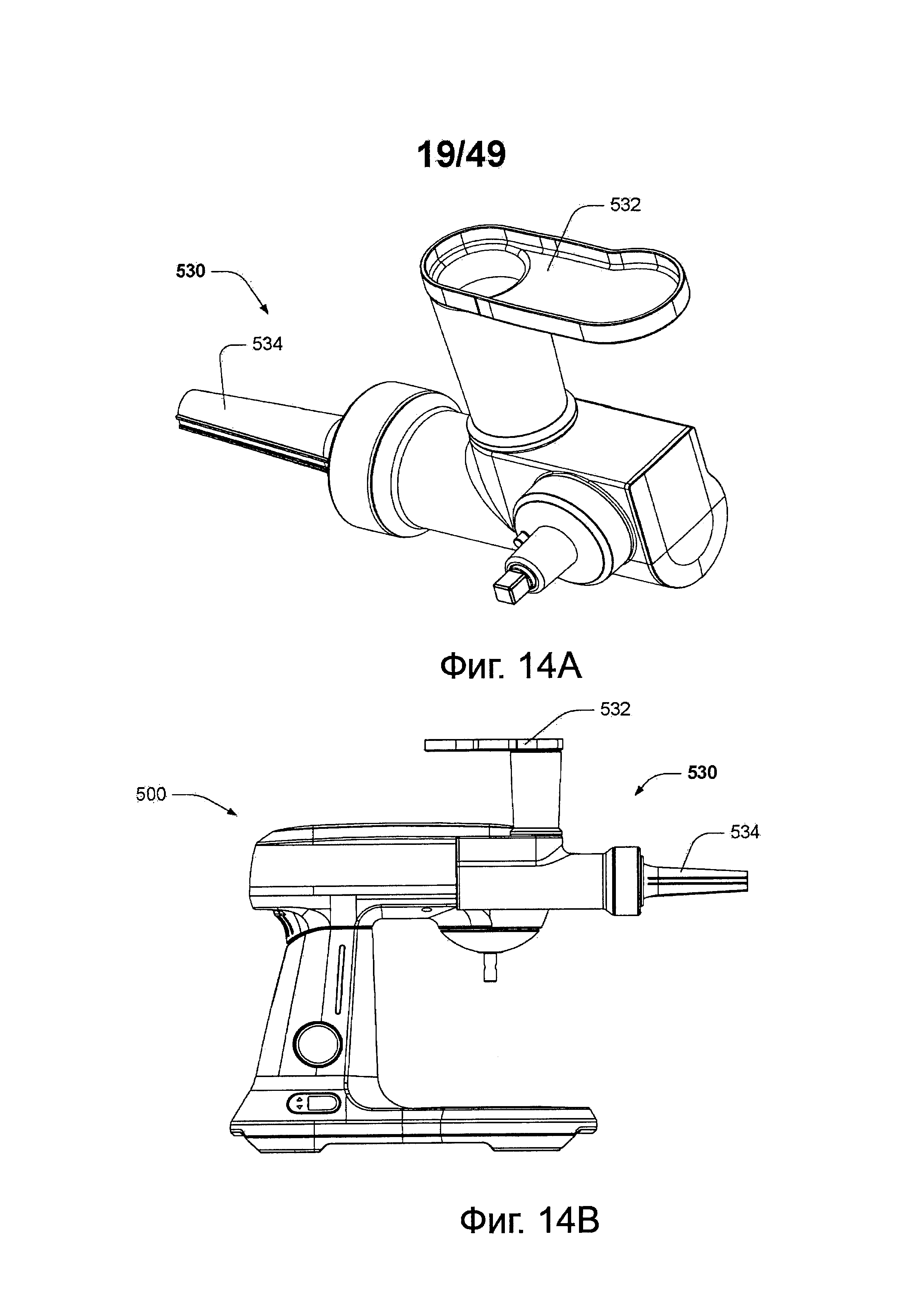
на фиг. 14А-14В - насадка в виде экструдера для колбасы;
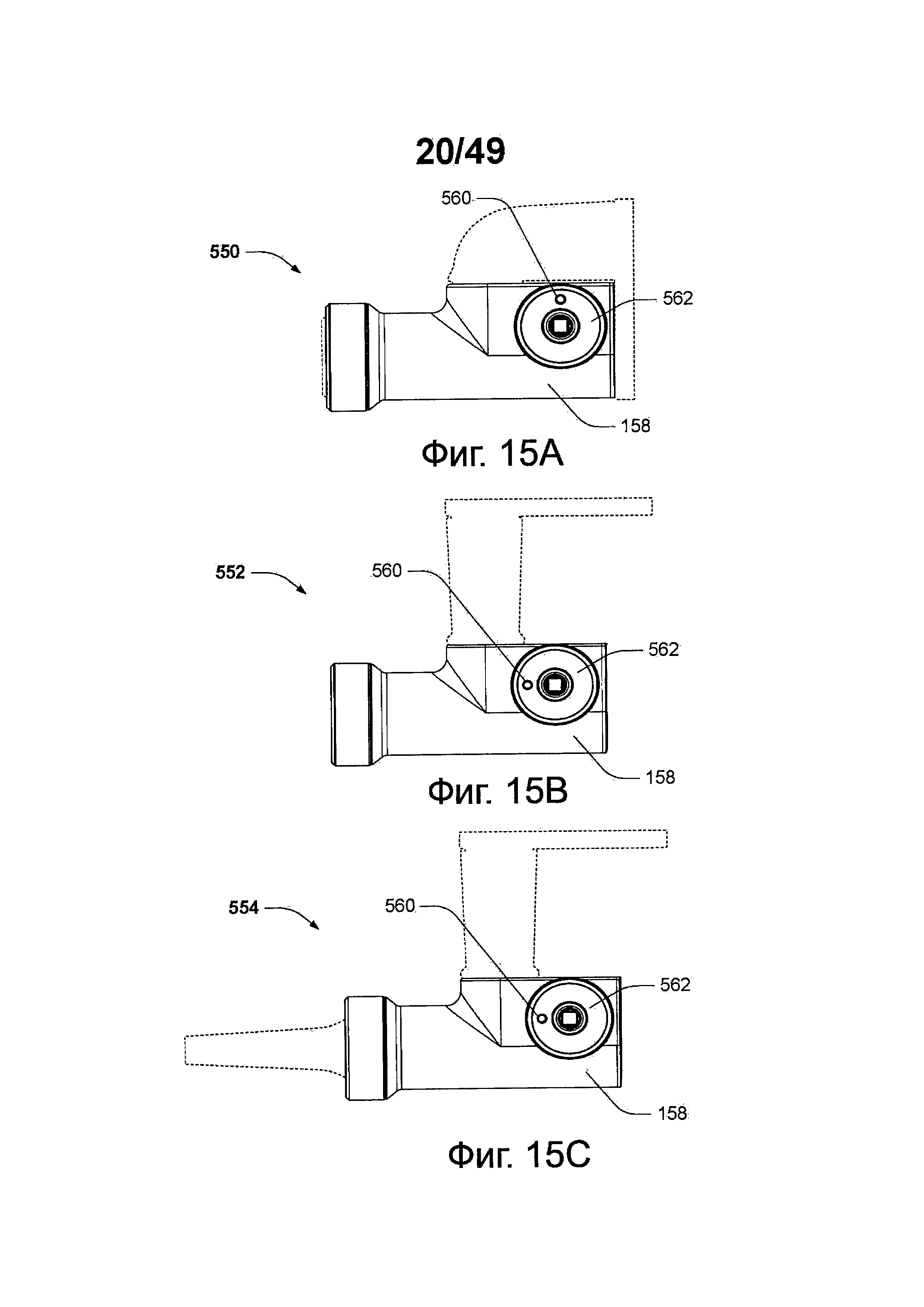
на фиг. 15А-15С - общая основанная часть для одного из вариантов выполнения устройства, потребляющего мощность привода;
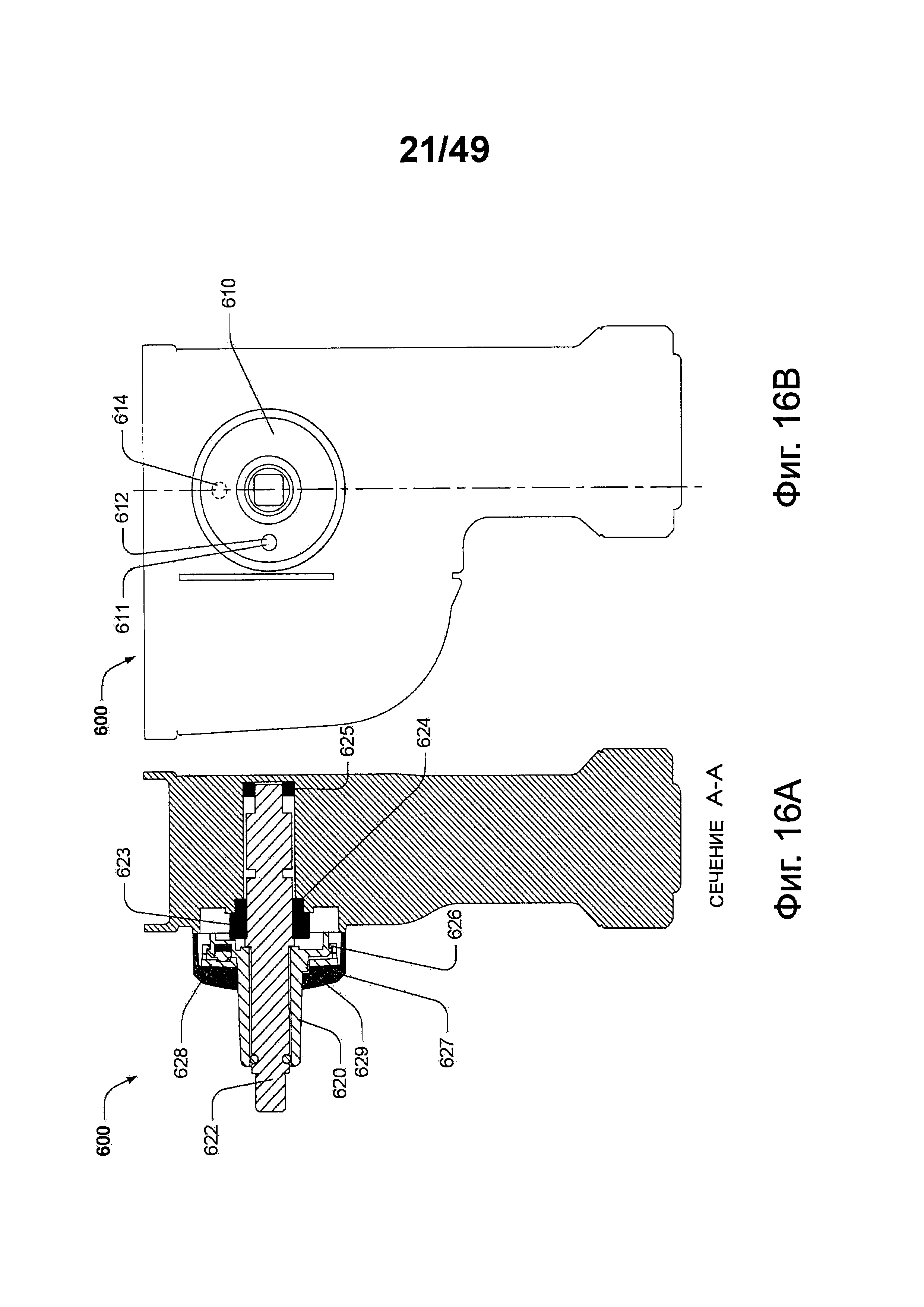
на фиг. 16А-16В - вариант выполнения насадки с одним штифтом;
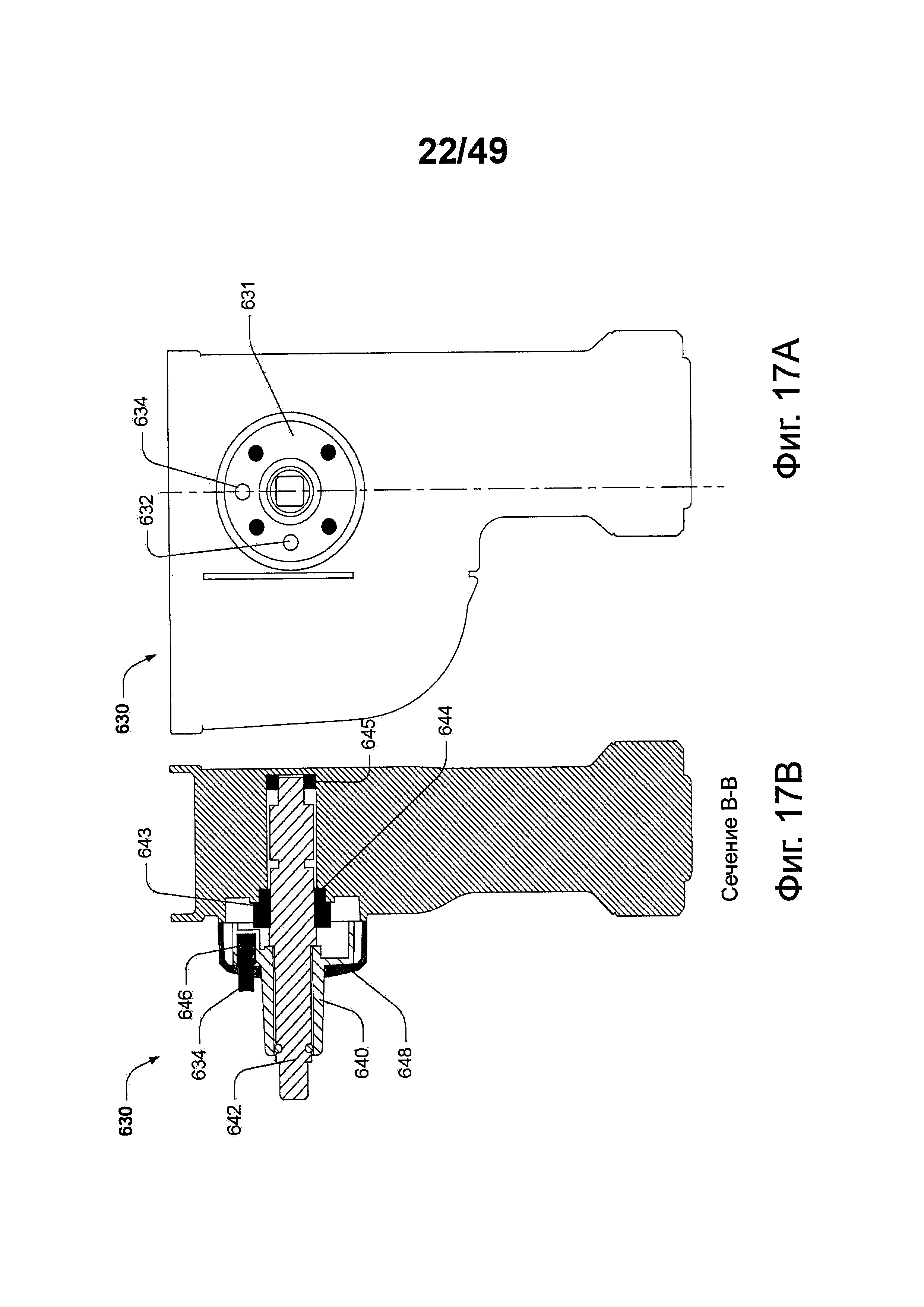
на фиг. 17А-17В - вариант выполнения насадки с несколькими штифтами;
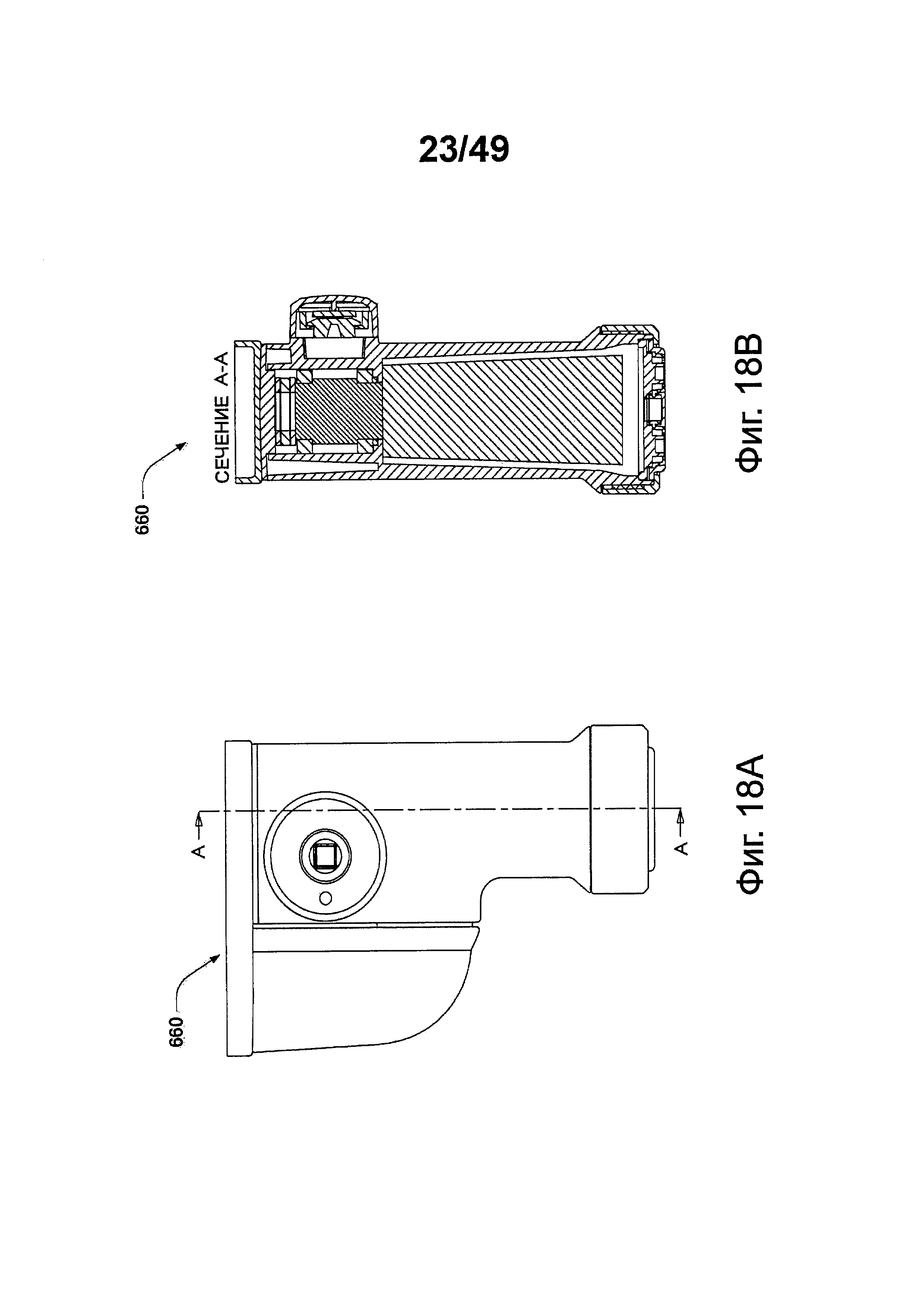
на фиг. 18А-18D - внутренняя часть насадки;
на фиг. 19 - один из вариантов соединения устройства, потребляющего мощность привода, с настольным миксером;
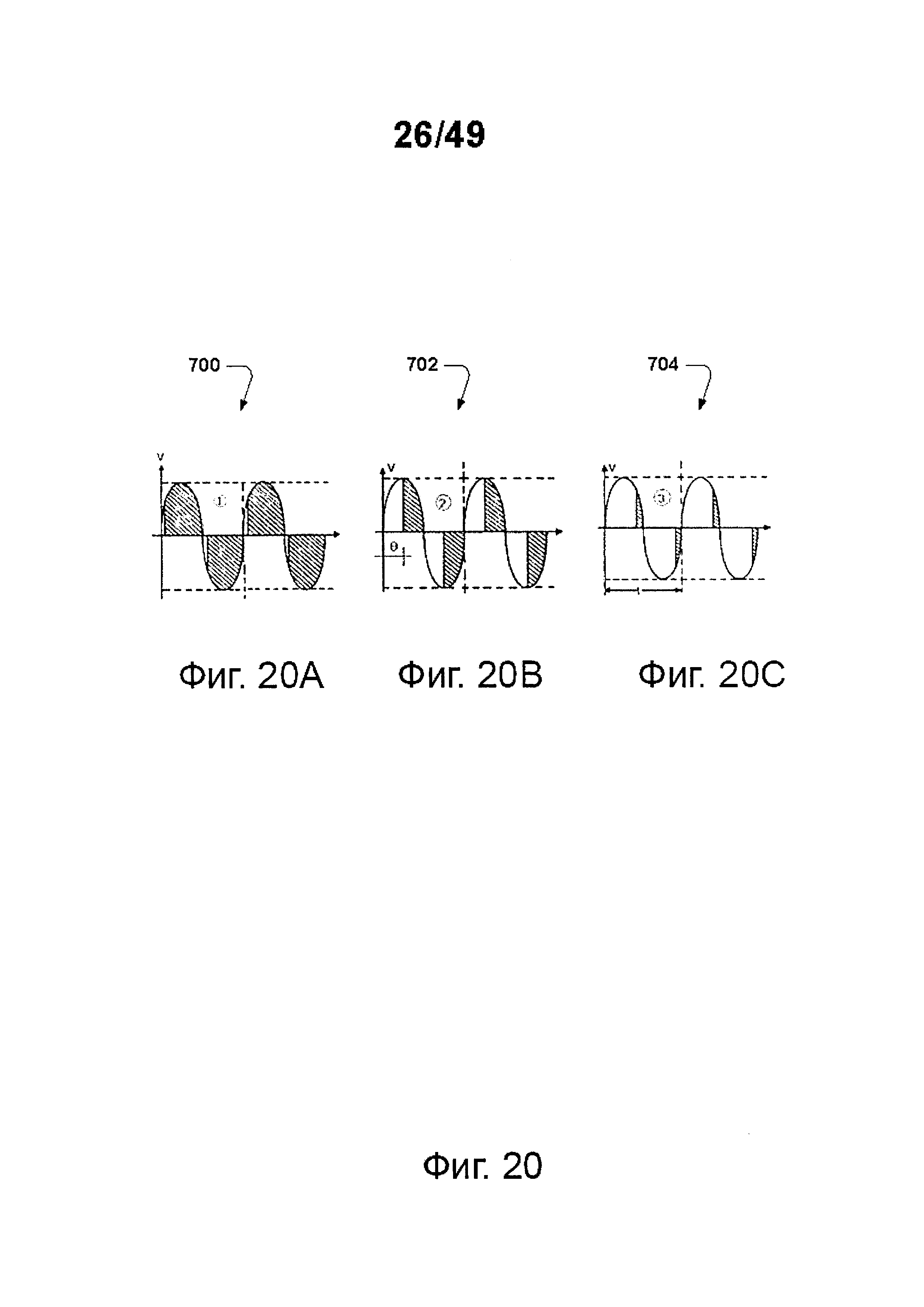
на фиг. 20А-20С - кривая выходной мощности, создаваемая выборочным переключением симистора при разных сдвигах фаз;
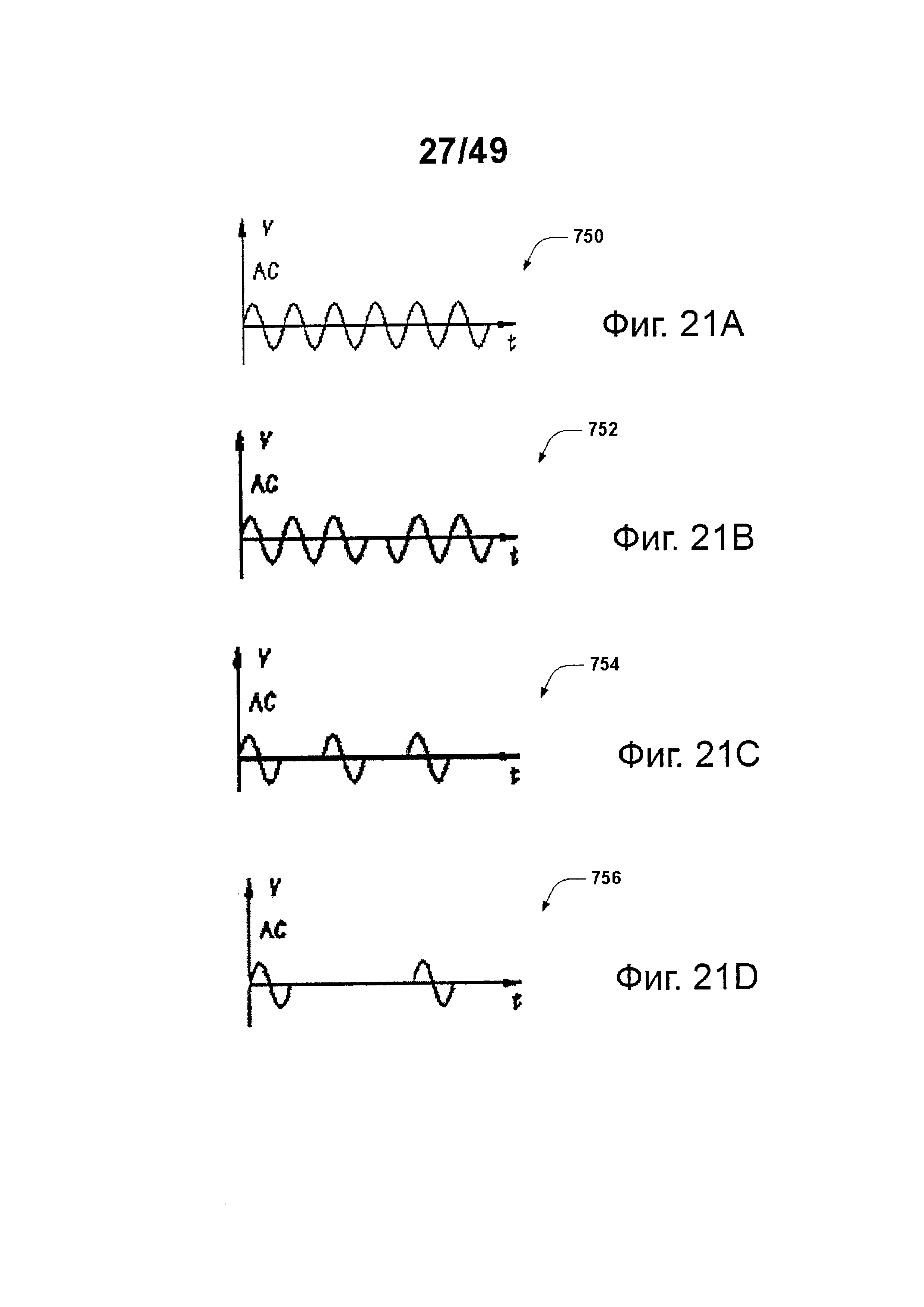
на фиг. 21А-21D - кривая выходной мощности, созданная с помощью выборочной отсечки кривой переменного тока симистором;
на фиг. 22 - блок-схема способа управления мощностью электродвигателя;
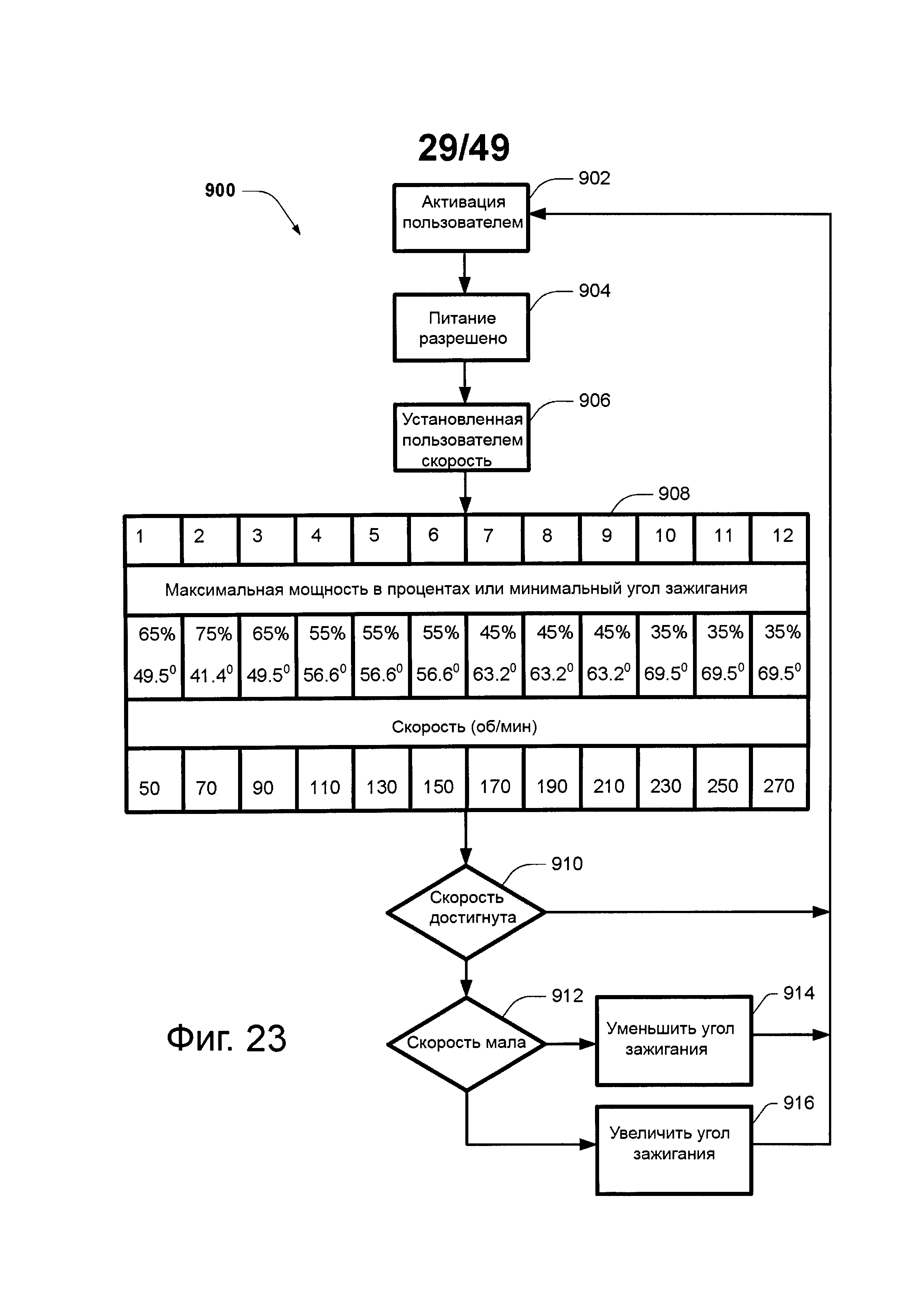
на фиг. 23 - блок-схема 900 способа управления мощностью электродвигателя;
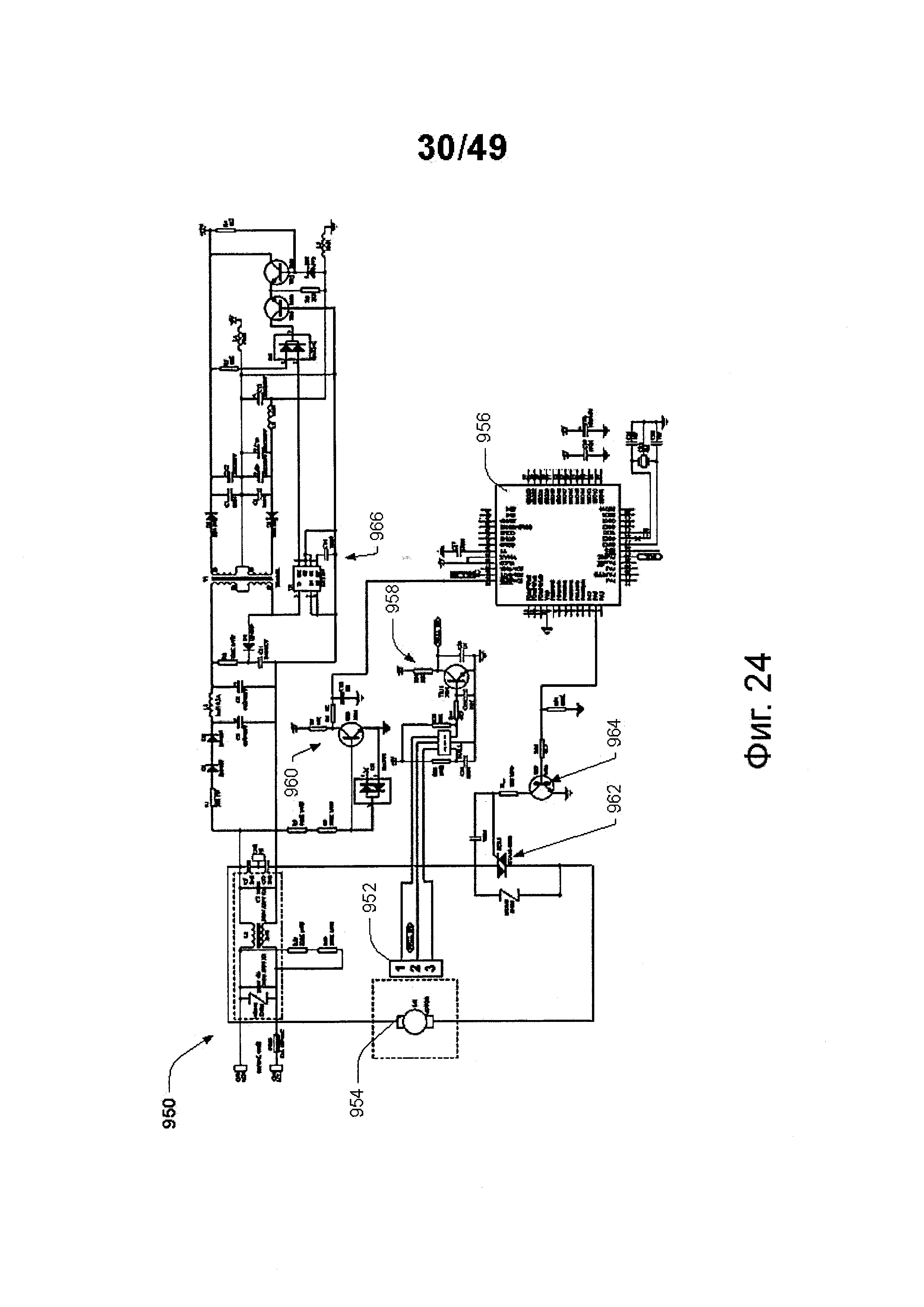
на фиг.24 - схема задающего контура ограничения мощности (в ваттах) симистором;
на фиг. 25 - насадки миксера, включающие в себя каркас для приспособлений и два отдельных приспособления, вид в перспективе;
на фиг. 26 - приспособление для каркаса, вид спереди;
на фиг. 27 - приспособление по фиг. 26, присоединенное к каркасу, вид спереди в вертикальном разрезе;
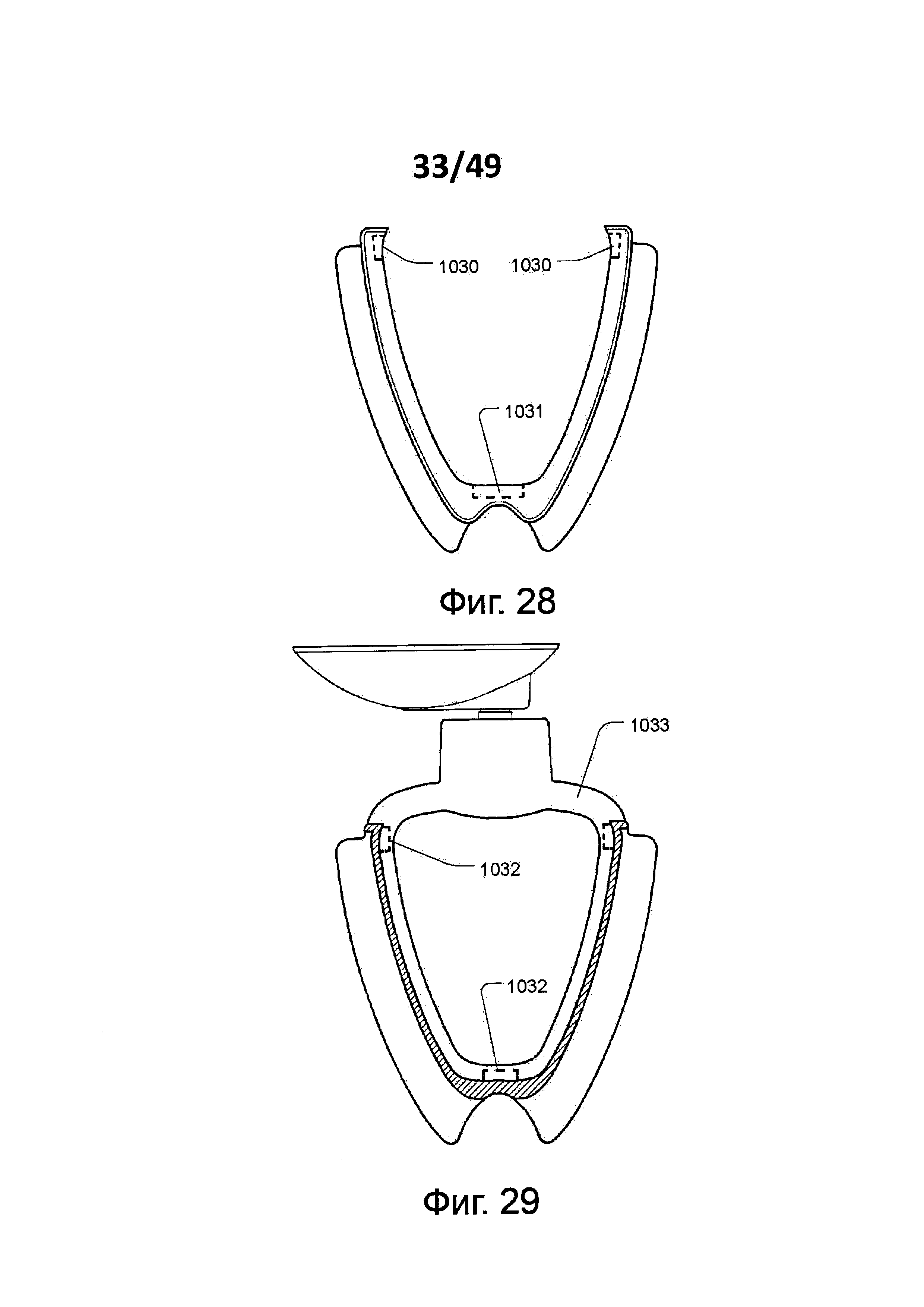
на фиг. 28 - другой вариант выполнения приспособления;
на фиг. 29 - приспособление и каркас, соединенные посредством магнитного взаимодействия, вид спереди;
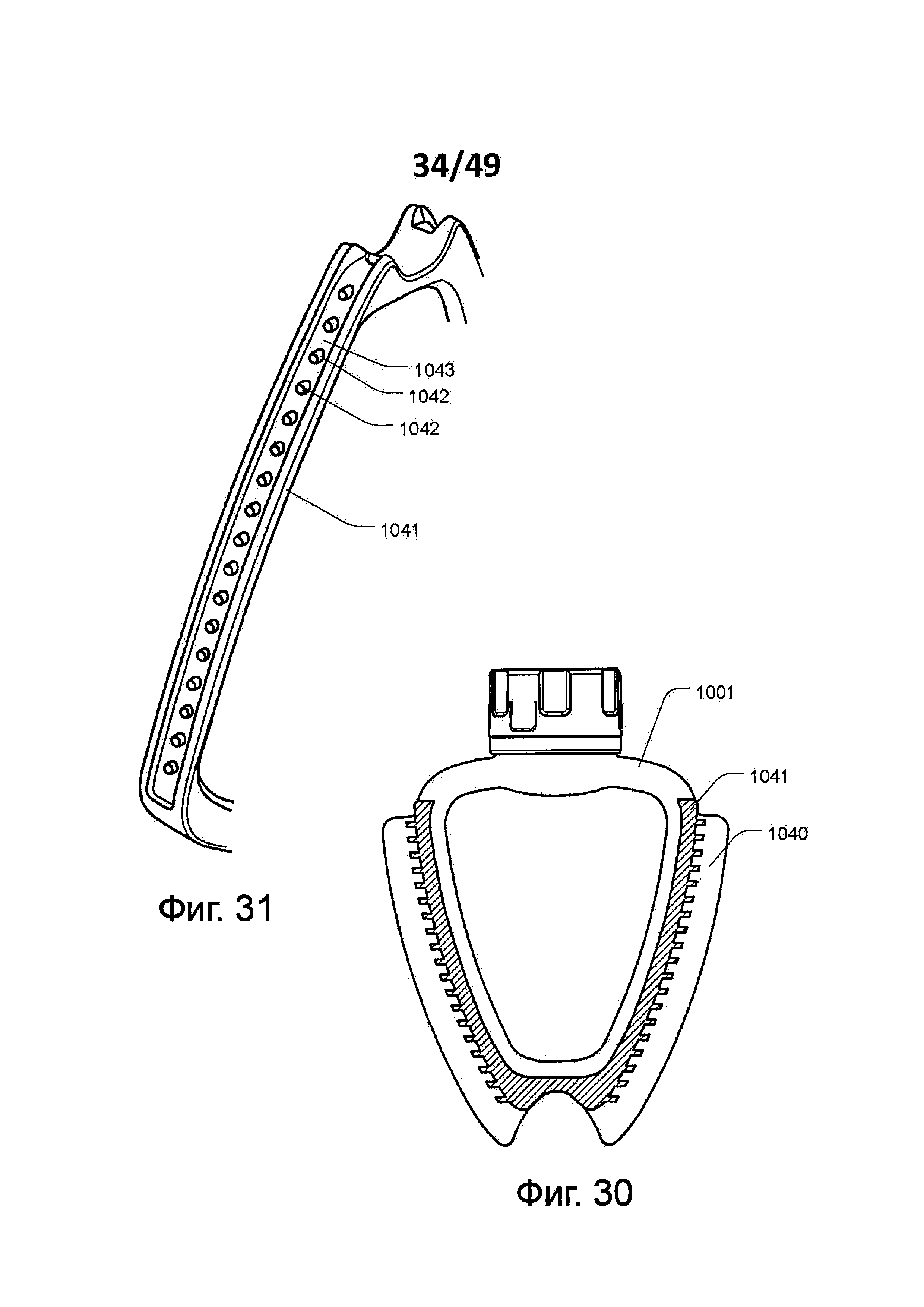
на фиг. 30 - приспособление с наформованной лопастью скребка, вид спереди в разрезе;
на фиг. 31 - участок приспособления без наформованной части;
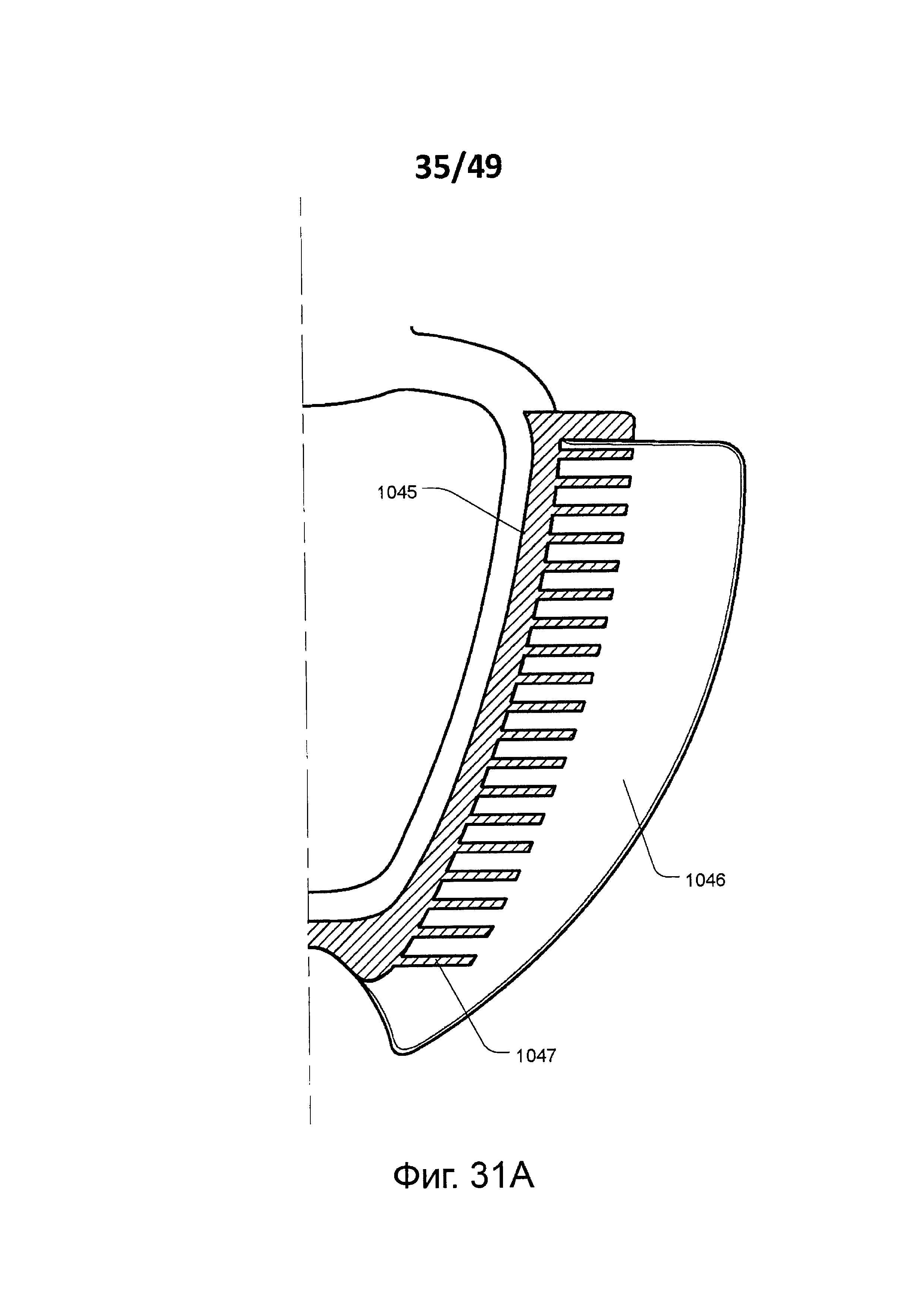
на фиг. 31А - приспособление, вид спереди в разрезе;
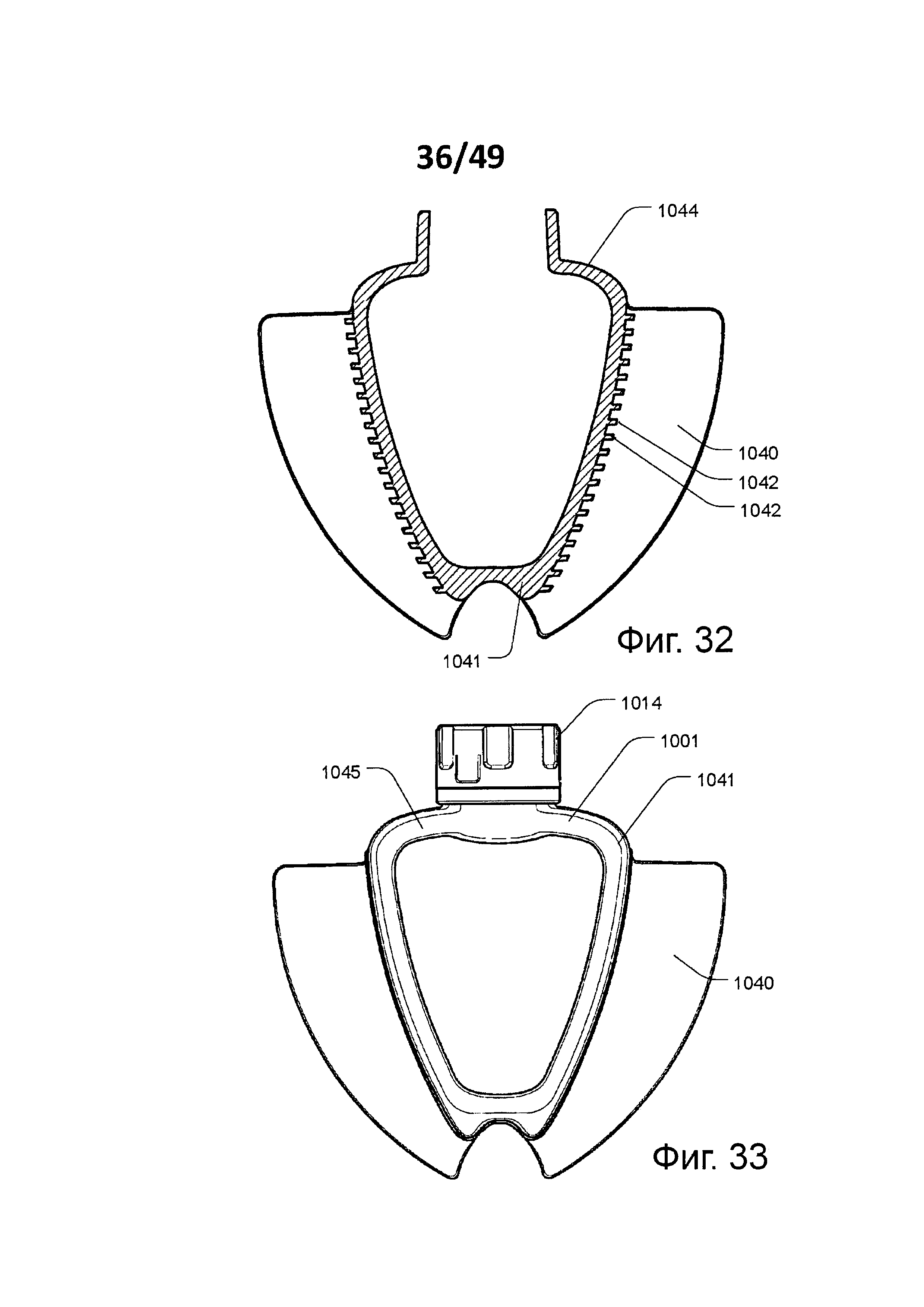
на фиг. 32 - приспособление с лопастями, вид в разрезе;
на фиг. 33 - приспособление, показанное на фиг. 32, установленное на каркас, имеющий втулку, вид спереди;
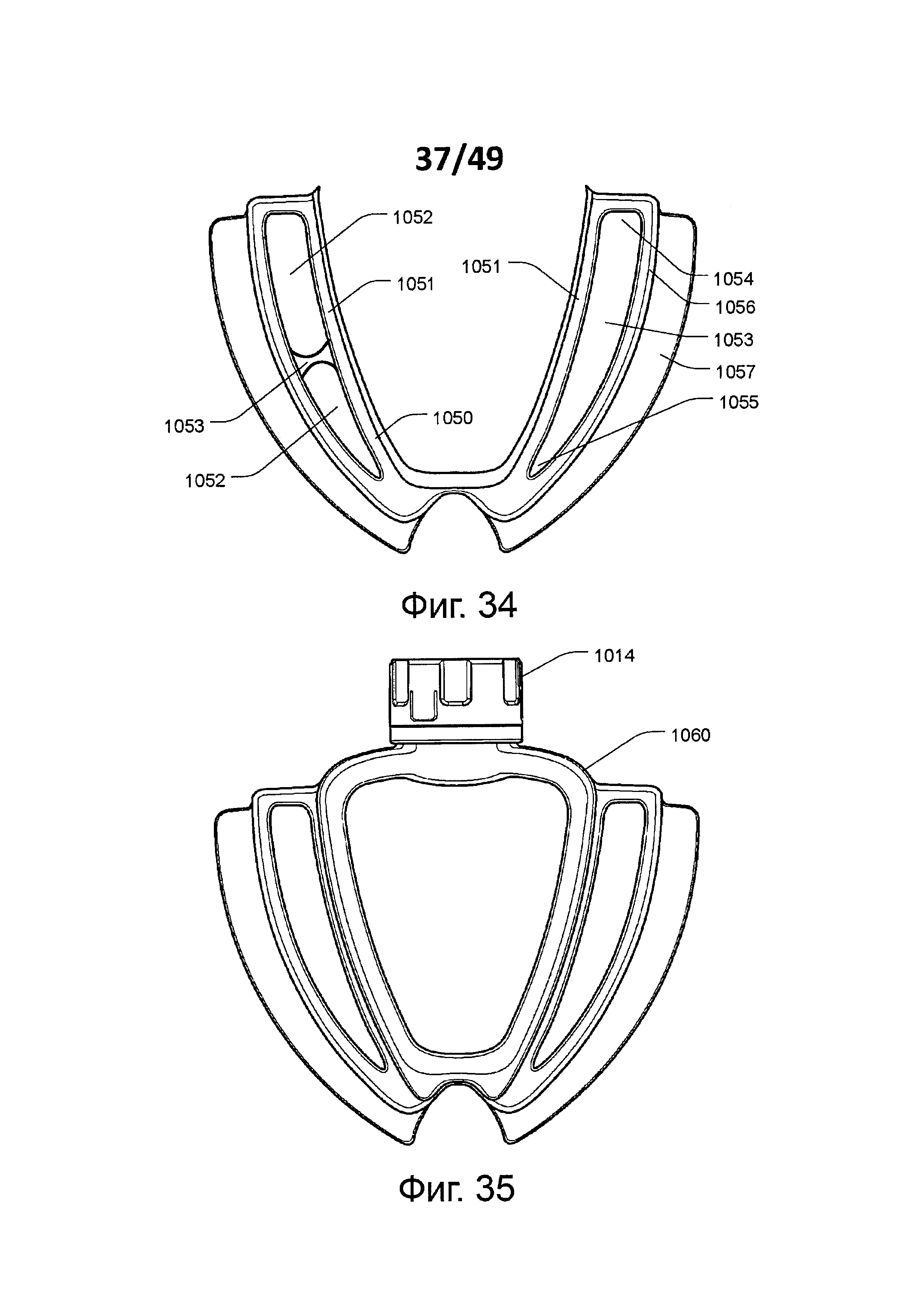
на фиг. 34 - приспособление с лопастью и сквозными отверстиями, вид спереди;
на фиг. 35 - каркас, приспособление и втулка, вид спереди;
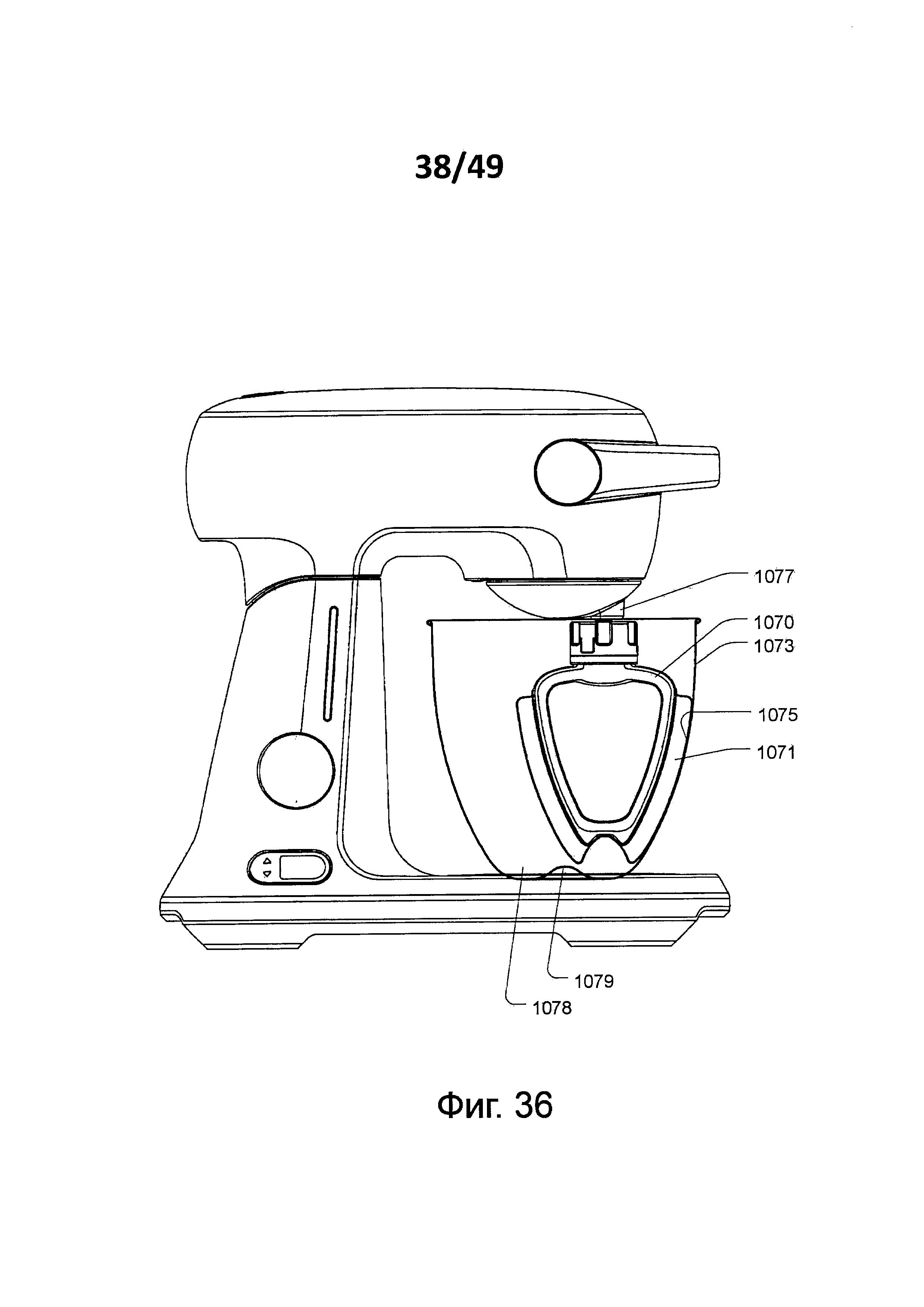
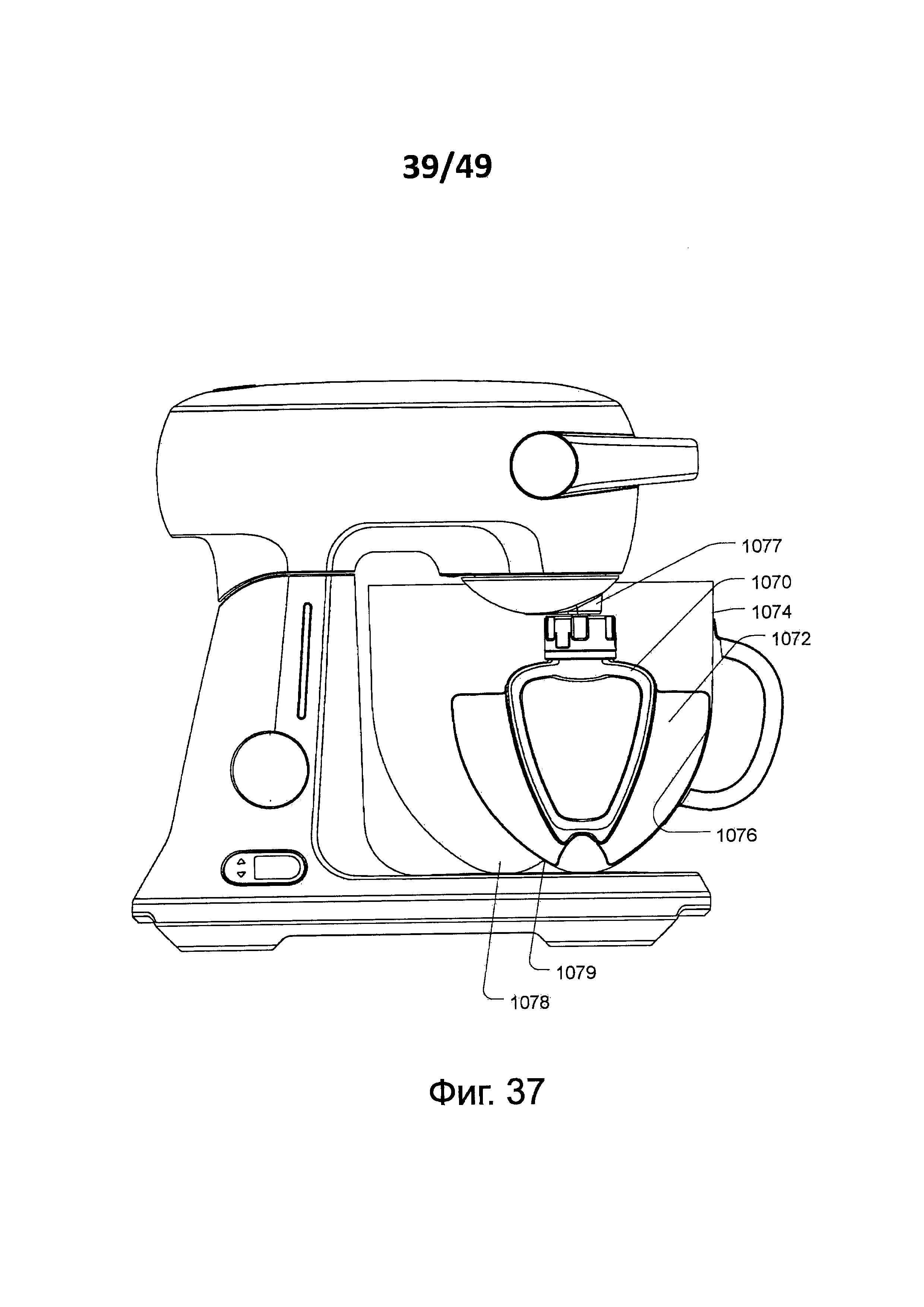
на фиг. 36, 37 - планетарный миксер, чаша и насадка, при этом чаша показана в разрезе, вид спереди;
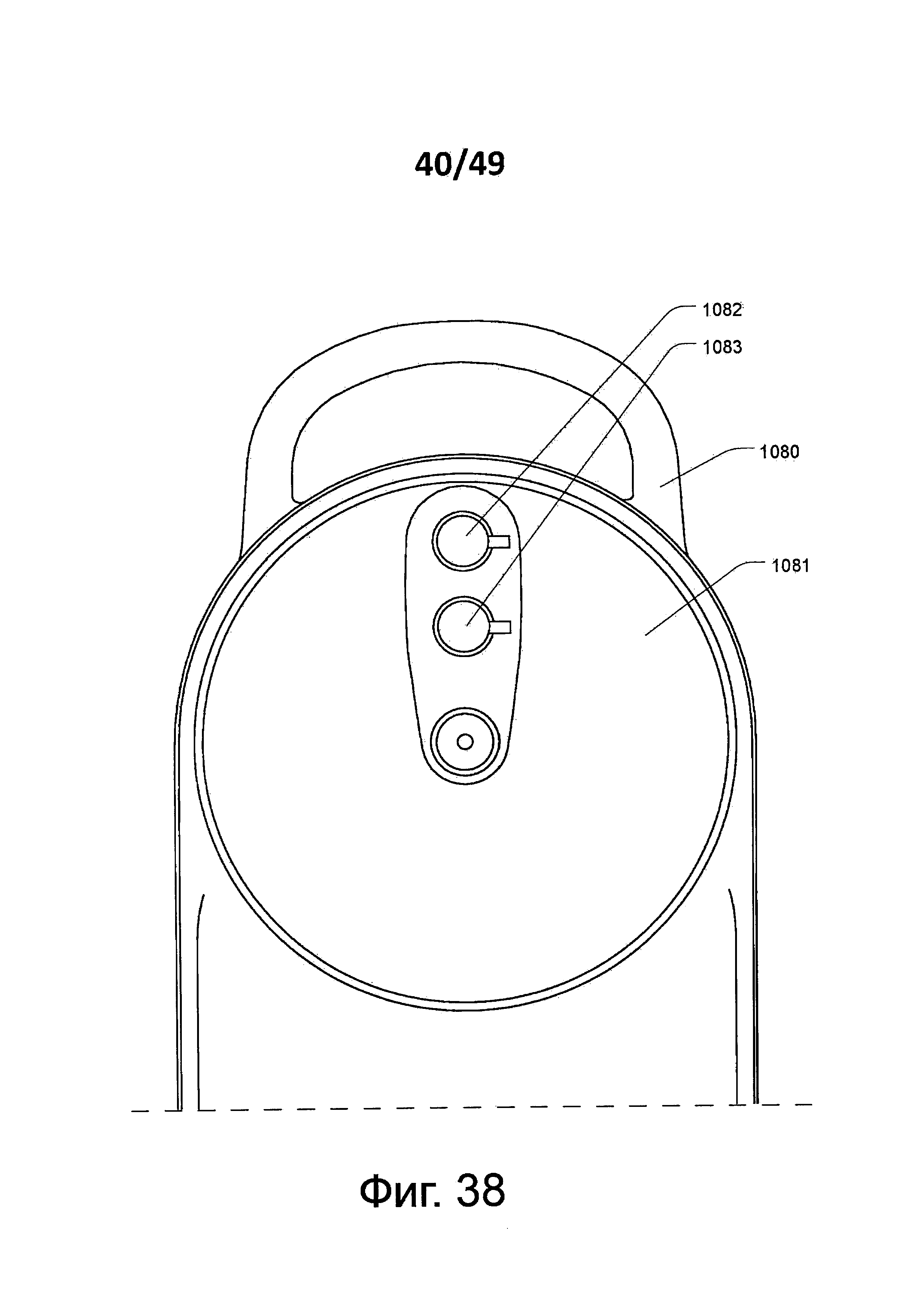
на фиг. 38 - головка планетарного миксера с двумя выходными шпинделями, вид снизу;
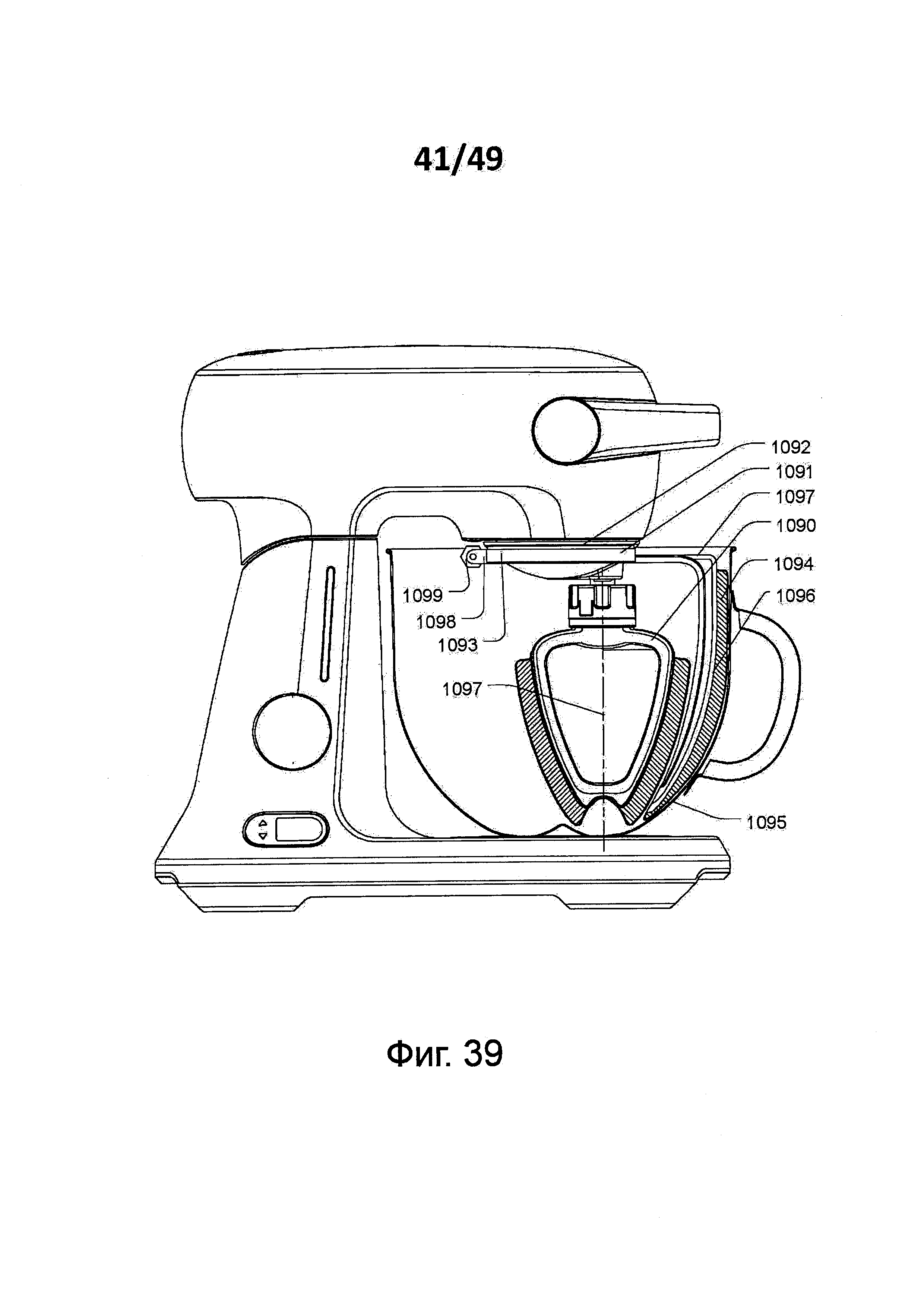
на фиг. 39 - планетарный миксер, насадки и чаша в частичном разрезе, показывающем обе насадки, одна из которых прикреплена к планетарной головке, вид спереди;
на фиг. 40 - чаша для перемешивания и планетарная головка, а также насадка с венчиком и скребком, используемая в комбинации со второй насадкой, присоединенной к планетарной головке, вид в разрезе;
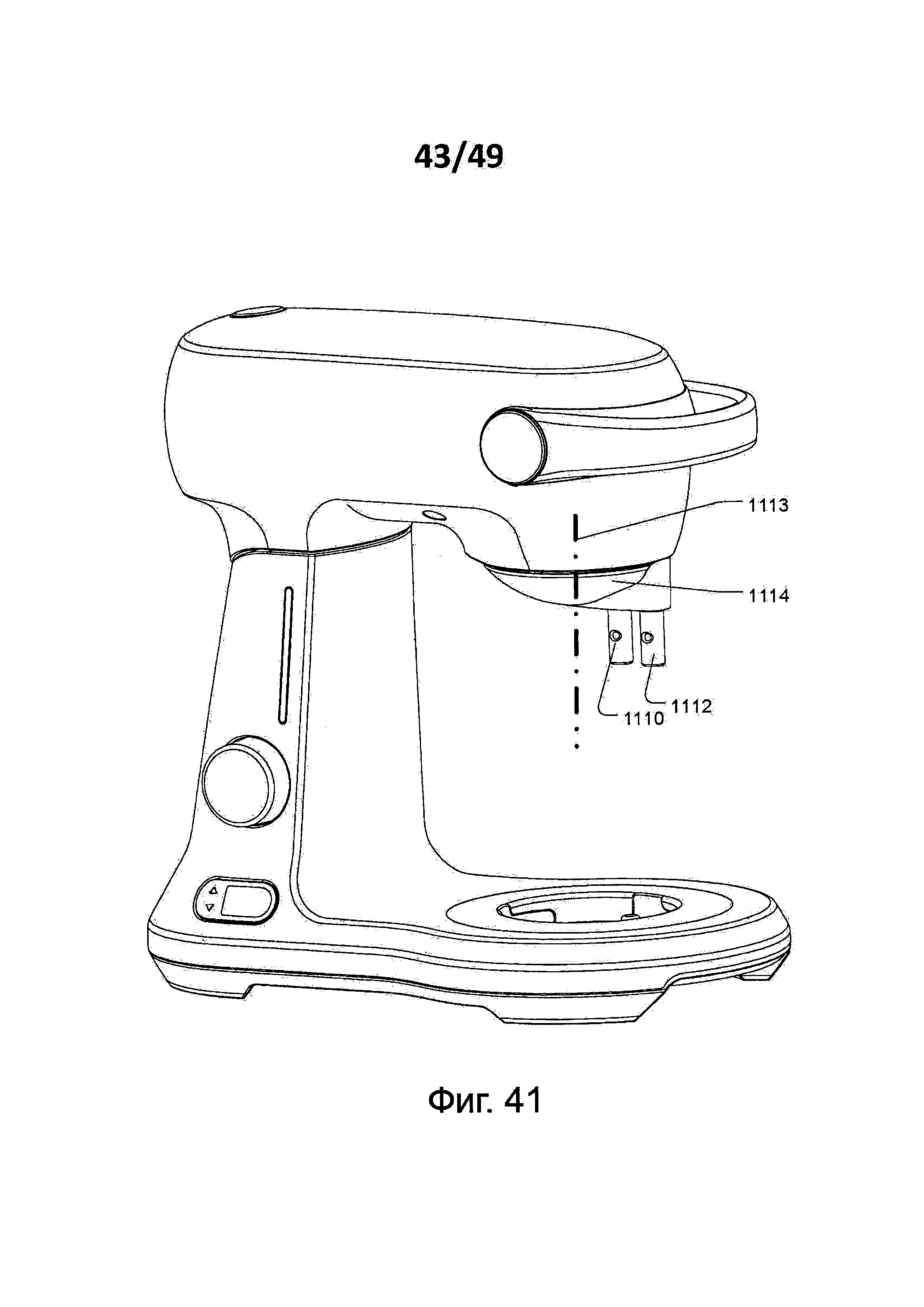
на фиг. 41 - планетарный миксер с двумя отдельно вращающимися выходными шпинделями, вид в перспективе;
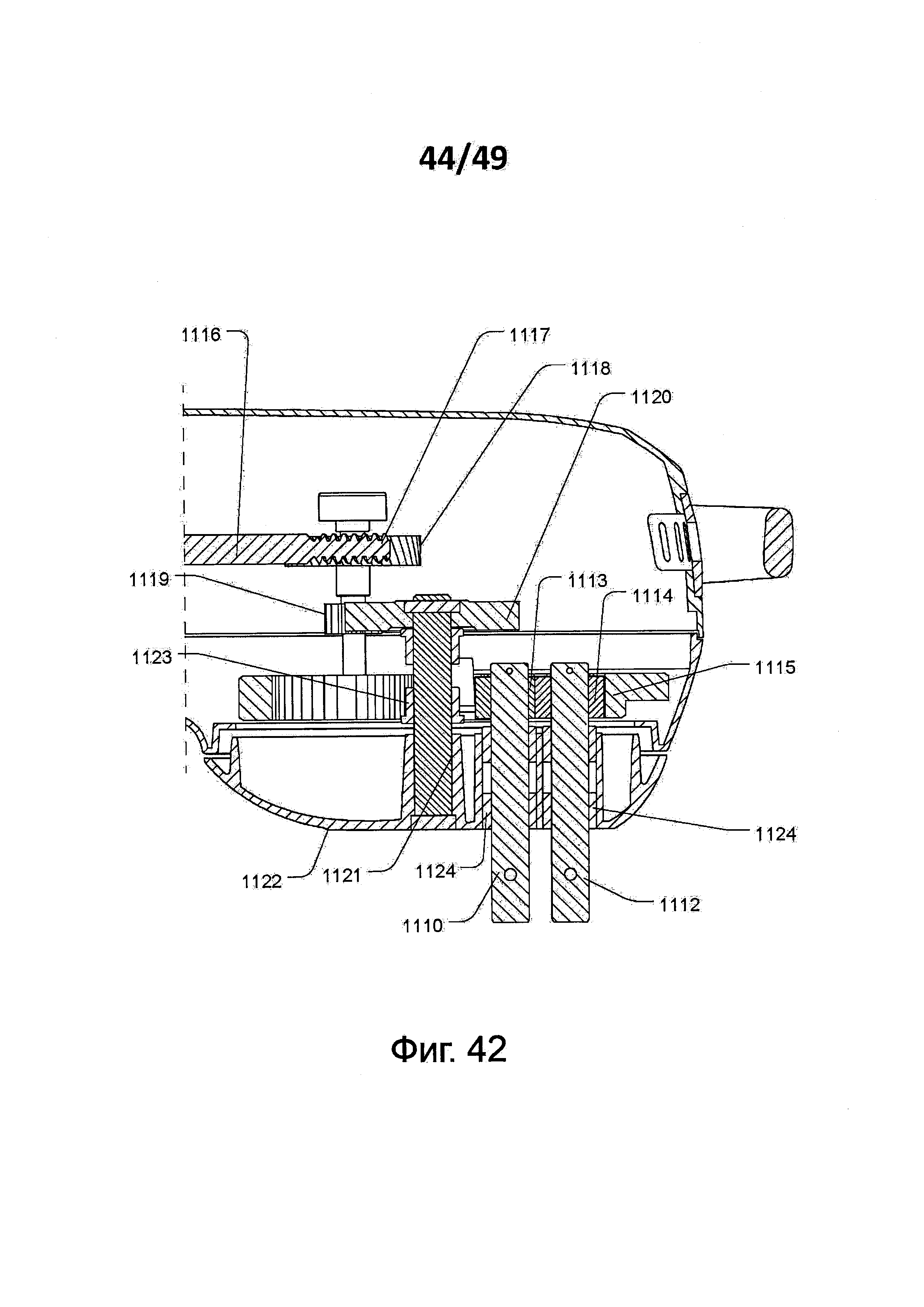
на фиг. 42 - планетарная головка, показанная на фиг. 41, вид в разрезе;
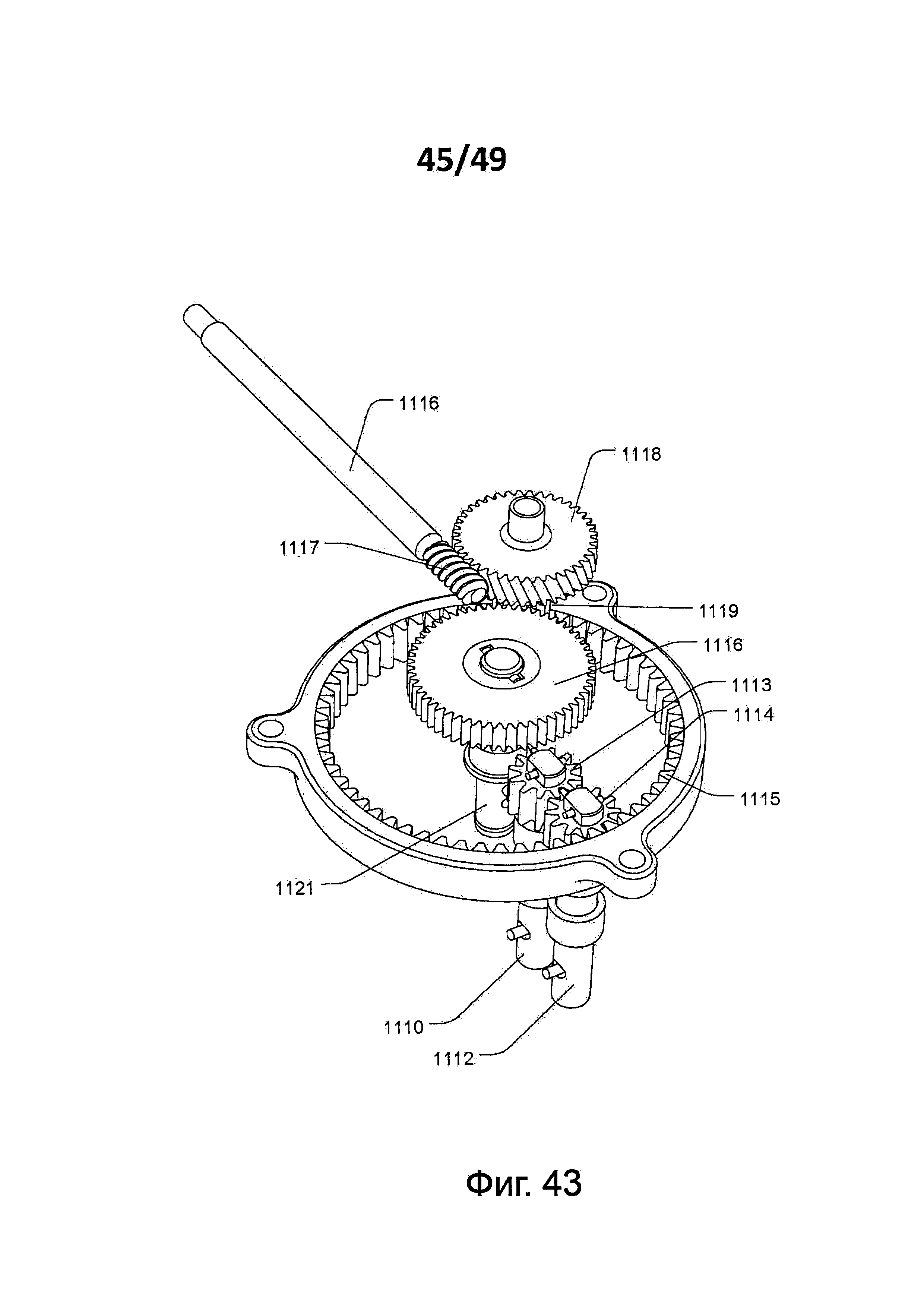
на фиг. 43 - расположенная внутри планетарной головки зубчатая передача, вид в перспективе;
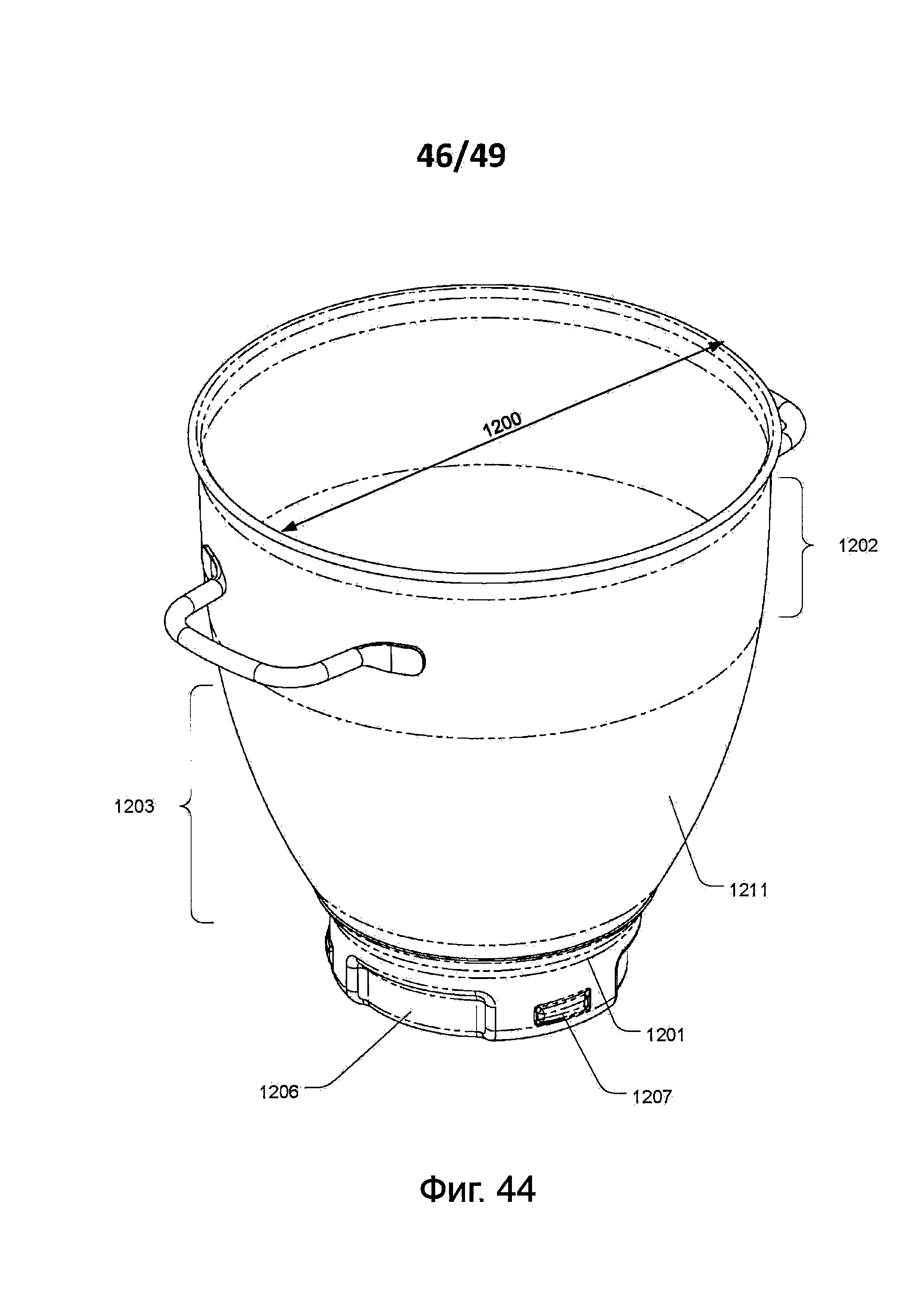
на фиг. 44 - чаша для перемешивания, вид в перспективе;
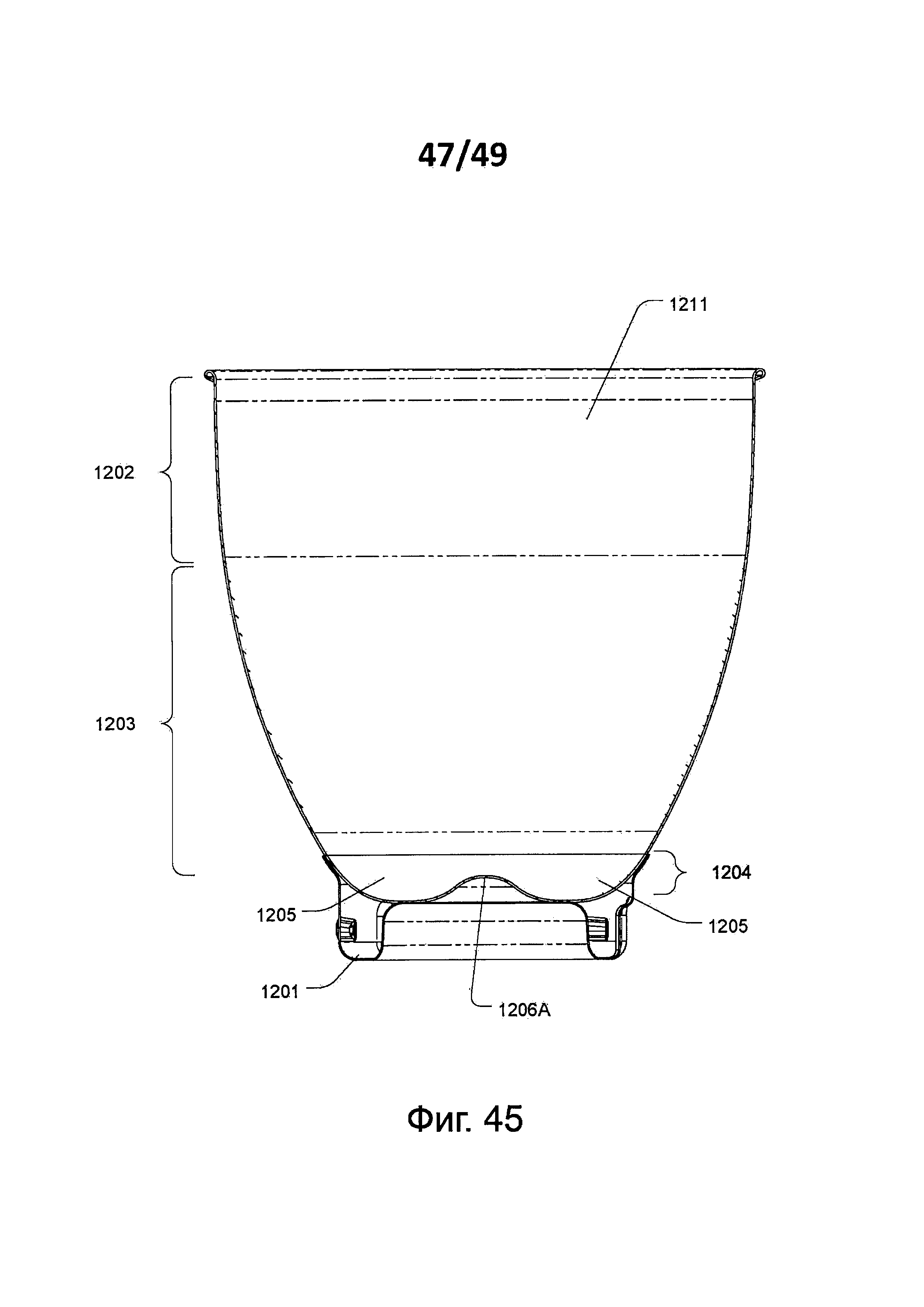
на фиг. 45 - чаша, показанная на фиг. 44, вид в разрезе;
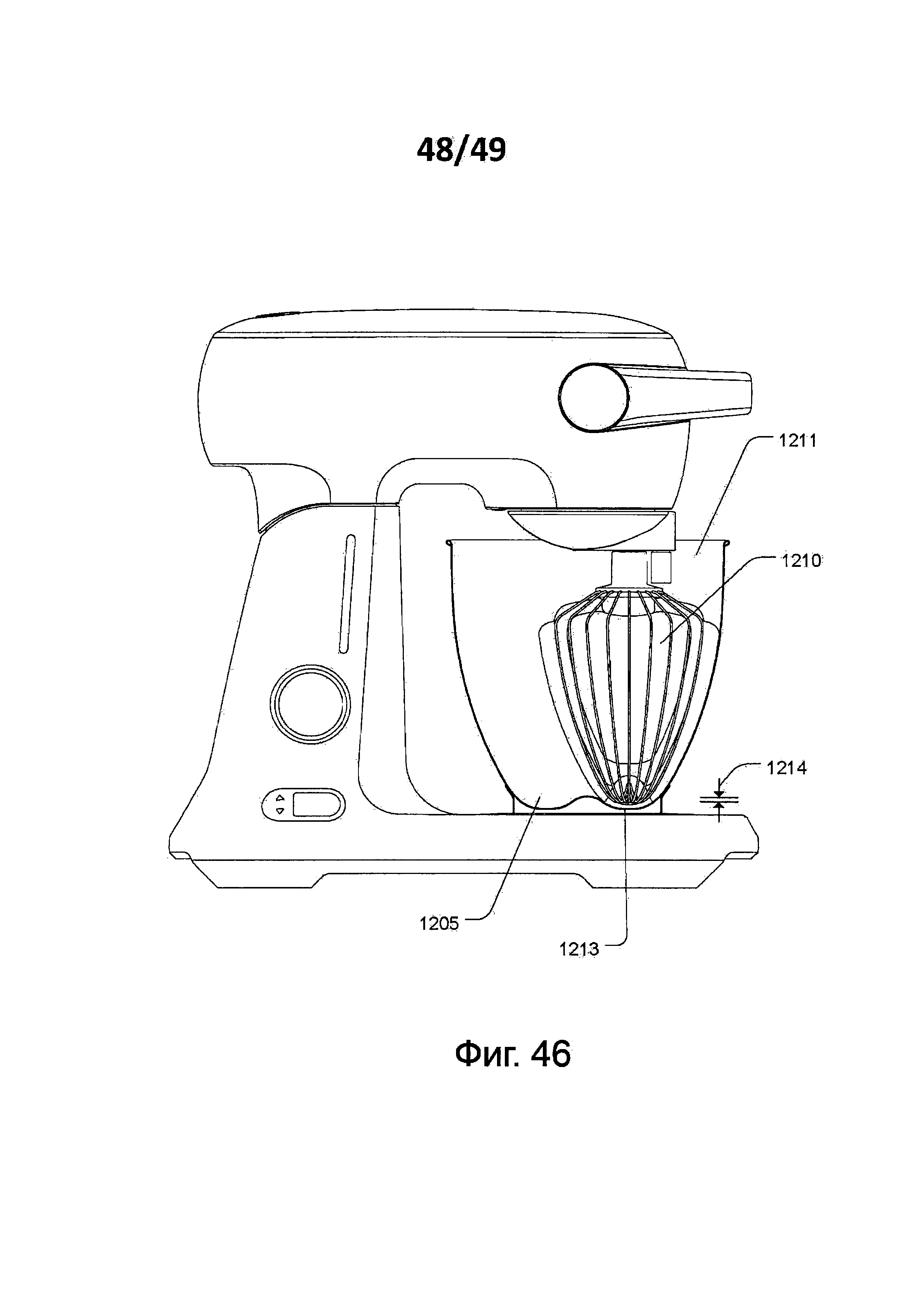
на фиг. 46 - планетарный миксер, чаша (в частичном разрезе) и насадка, вид спереди;
на фиг. 47 - планетарный миксер и чаша, вид в разрезе.
Осуществление изобретения
Взбивающее приспособление со скребком
В каждом варианте выполнения взбивающее приспособление со скребком (например, устройство 100 с венчиком и скребком, показанное на фиг. 1А) содержит венчик 110, включающий в себя множество проволочных взбивающих элементов 112. Взбивающее приспособление со скребком (или насадка) может быть разъемно присоединено к настольному миксеру.
Проволочные взбивающие элементы 112 удерживаются вблизи соединительного узла 120. Венчик 110 обычно образован множеством проволочных взбивающих элементов 112, расположенных диаметрально противоположно и распределенных вокруг оси соединительного узла 120.
Взбивающее приспособление также содержит скребок 130. Скребок 130 обычно имеет плечи 132 и/или лопасти 134. Очевидно, что лопасти и плечи скребка могут быть выполнены за одно целое, например, лопасти могут быть наформованы поверх плеч скребка.
Очевидно, что проволочные элементы 112 венчика, основание 113 (или вершина) венчика и два проходящих наружу (радиально) боковых участка 114 неразъемно присоединены к соответствующему основанию 113 и отходят от него. Боковые участки венчика обычно дугообразные. Другая пара прямолинейных соединительных участков 114 венчика неразъемно присоединена к концам боковых участков 114 венчика и проходит вовнутрь друг к другу для схождения (и крепления) около соединительного узла 120. Свободный конец проволочных элементов венчика прикреплен около соединительного узла 120.
Основание венчика может быть вогнуто внутрь или может быть по существу плоским или выгнутым. Основания венчика могут быть пространственно разделены путем введения другого основания другого проволочного элемента венчика, при этом сохраняются по существу идентичные боковые участки и соединительные участки венчика. В альтернативном варианте проволочные элементы венчика могут быть по существу идентичными.
Перекрывающиеся проволочные элементы с обратным изгибом сокращают «мертвую зону», а без этого мертвая зона может быть ограничена в пределах центра вихря. Эта конструкция обеспечивает зону перемешивания (или взбалтывания) для введения воздуха в смесь, что помогает приготовить яичные белки и способствует обеспечению нежной равномерной консистенции.
Каждый из проволочных элементов венчика выполнен в виде удлиненных вдоль оси в основном цилиндрических отрезков упругой проволоки из нержавеющей стали с одинаковым сечением по всей длине.
Как показано на фиг. 2, при использовании в миксере 210 скребок 130 (более конкретно, его передний гибкий край 131) предназначен для вращения вокруг соединительного узла и контакта с чашей 212. Плечи и/или лопасти скребка могут быть дугообразными для обеспечения контакта с чашей по существу вдоль всей длины, и/или обеспечения контакта с чашей при подъеме узла головки 214. Соединительный узел может быть выполнен в виде байонетного соединения для обеспечения разъемного соединения с валом планетарного привода настольного миксера. Очевидно, что планетарный настольный миксер содержит чашу, прикрепленную к основанию в заранее определенном положении.
На фиг. 1А-1D показан вариант выполнения приспособления с двумя скребками. Приспособление может содержать скребок, который сформирован с ним за одно целое, или жестко присоединен к нему, или присоединен к нему разъемно. Элементы скребка обычно проходят по существу радиально наружу по отношению к оси вращения соединительного узла.
Хотя на фиг. 1А-1D показано приспособление с двумя диаметрально противоположно расположенными скребками, очевидно, что для улучшенных характеристик взбивания венчик может быть дополнен одним или несколькими плечами скребка с лопастями. Каждый скребок независим от другого для улучшения его сгибания и смягчения при его прохождении по стенке чаши и увеличения поверхности контакта лопасти. Хотя предпочтительны является использование двух скребков, очевидно, что может быть использован один или несколько скребков.
Элементы скребка (обычно лопасть 134 и плечо 132) содержат передний верхний участок для отклонения и/или заворачивания остатков на стенке чаши назад в смесь. Лопасть имеет профиль с изогнутым краем. Лопасть скребка может быть расположена под углом к направлению вращения, чтобы смягчать контакт с чашей и уменьшить нарушение планетарного действия.
Элементы скребка обычно изготовлены из полимера (или сополимера), что обеспечивает их сгибание при контакте. Очевидно, что сополимер может включать в себя материал на основе пластмассы или силикона, которые обычно не классифицируются, как полимеры. Элементы скребка могут иметь траекторию, проходящую внутри профиля венчика для обеспечения пространства для изгиба. Для увеличения площади поверхности контакта со стенкой чаши передний гибкий край лопасти предпочтительно образован из более мягкого материала, чем плечо скребка.
Проволочные элементы венчика могут иметь профиль, который соответствует стенке чаши. Профиль проволочных элементов венчика может точно повторять форму стенки чаши, что при использовании обеспечивает непосредственный контакт со стенкой чаши вдоль соответствующих боковых участков (по существу по всей длине). Боковой участок венчика может соответствовать по форме профилю стенки чаши, а основание венчика и соединительный участок вытянуты (или проходят) так, чтобы по существу обеспечивать контакт по всей длине между боковым участком венчика и стенкой чаши. Элементы скребка расположены с зазором (обычно на равном расстоянии) от проволочных элементов венчика, что исключает контакт элементов скребка с проволочными элементами венчика при обычном использовании.
Как показано на фиг. 2, лопасть имеет ширину, превышающую промежуток между плечами скребка и стенкой чаши, чтобы лопасть был смещена для обеспечения контакта по существу вдоль всей ее длины. Гибкость лопасти и место ее установки на плече обеспечивают увеличение площади контакта и улучшенное соскабливание. Скребок сконфигурирован для возможности примыкания к основанию чаши и профилю стенки для уменьшения мертвых зон в смеси.
Гибкость лопасти также может позволить плечу скребка подходить к стенке чаши, когда головка миксера поднимается, уменьшая тем самым количество остатков на скребке перед отключением электродвигателя привода при заранее заданном наклоне головки.
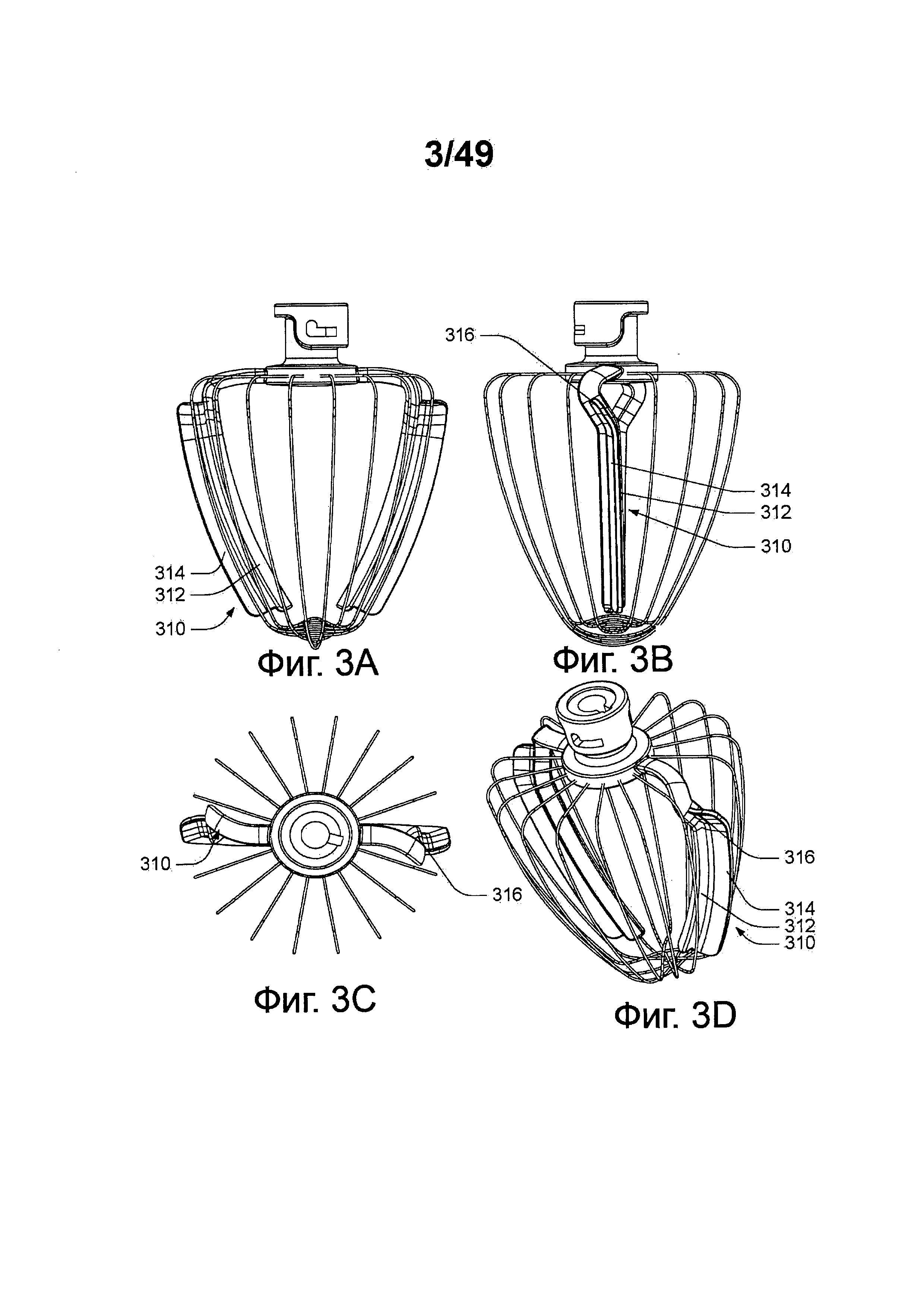
На фиг. 3A-3D показан альтернативный вариант выполнения взбивающего приспособления со скребком, согласно которому скребок 310 (обычно содержащий плечи 312 и/или лопасти 314) содержит участок 316 сброса в верхней области для направления и/или отвода остатков со стенки чаши назад в смесь.
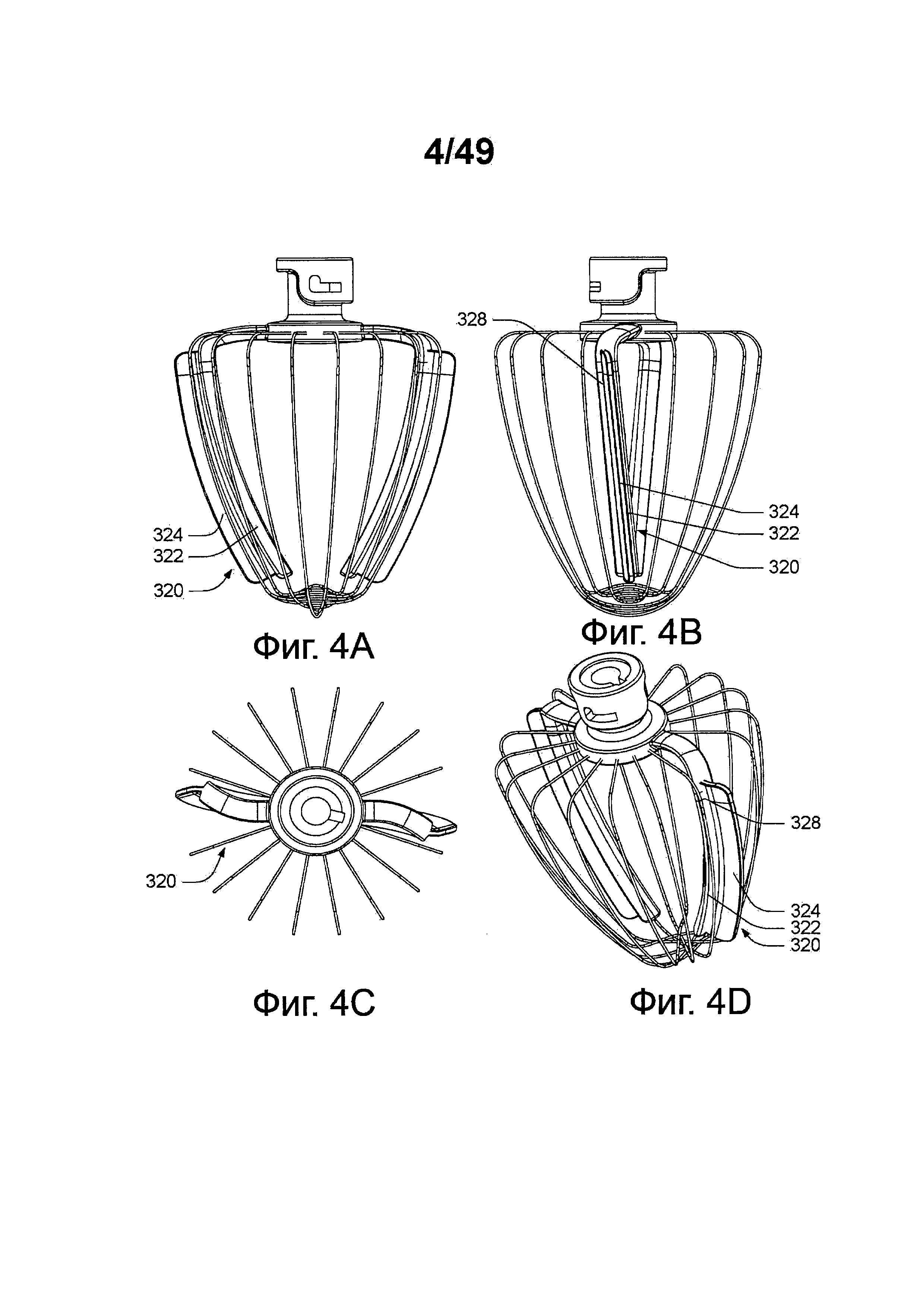
На фиг. 4A-4D показан альтернативный вариант выполнения взбивающего приспособления со скребком, согласно которому скребок 320 (обычно содержащий плечи 322 и/или лопасти 324) содержит по существу прямой участок 328, который отклонен (с верхней частью, ведущей в направлении вращении) для направления и/или отвода остатков со стенки чаши назад в смесь.
На фиг. 5A-5D показан альтернативный вариант выполнения взбивающего приспособления со скребком, согласно которому скребок 330 (обычно содержащий плечи 443 и/или лопасти 334) содержит значительно отогнутый участок 336 сброса в верхней области и по существу прямой участок 338, который расположен под углом (с верхней частью, ведущей в направлении вращения) для направления и/или отвода остатков со стенки чаши назад в смесь.
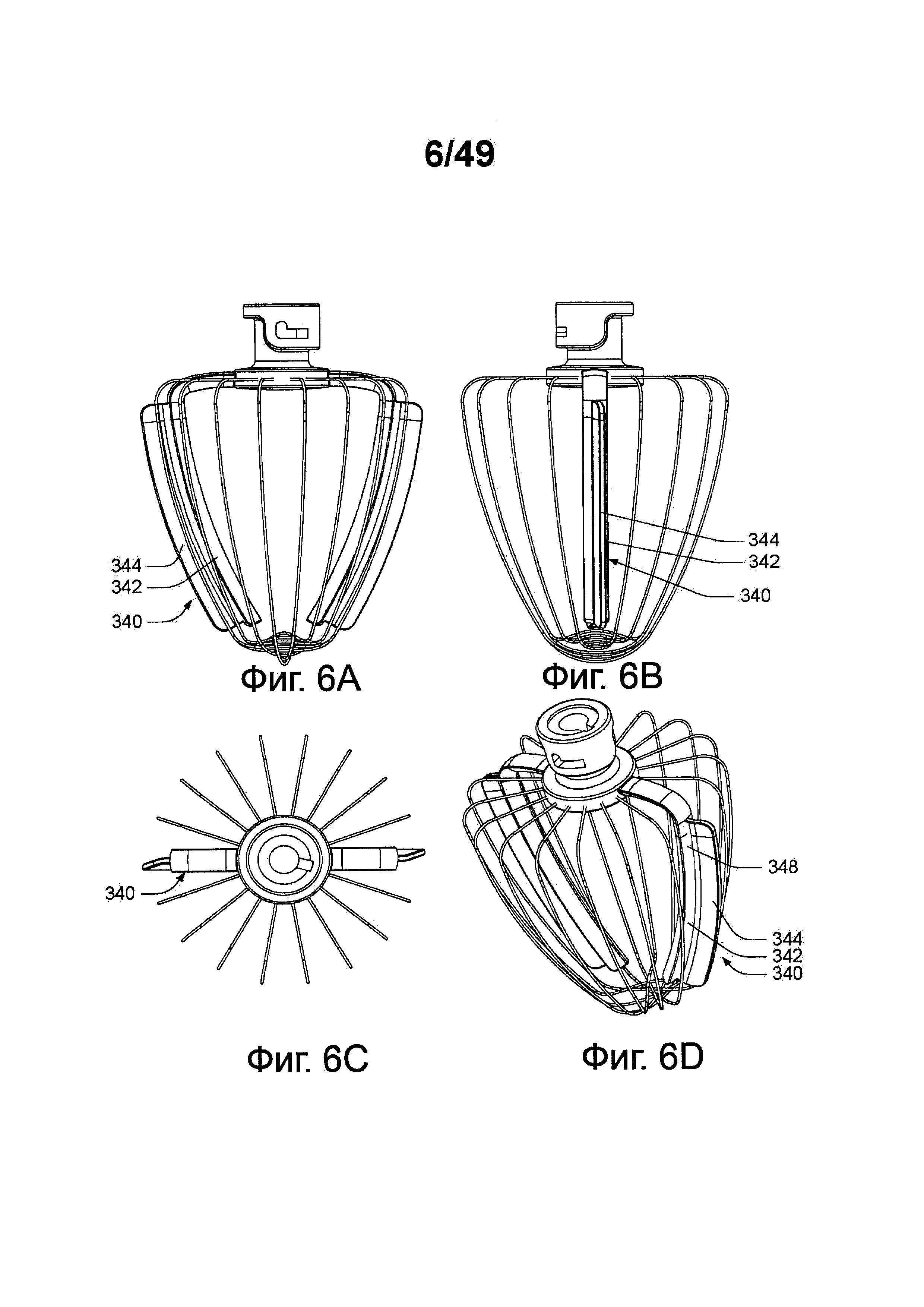
На фиг. 6A-6D показан альтернативный вариант выполнения взбивающего приспособления со скребком, согласно которому скребок 340 (обычно содержащий плечи 342 и/или лопасти 344) содержит по существу прямой участок 348, который по существу вертикален, чтобы оказывать сопротивление подъему смеси относительно стенки чаши. Эта конструкция хорошо действует и в высоких чашах, в частности, когда предпочтительно распространение смеси по большей площади поверхности.
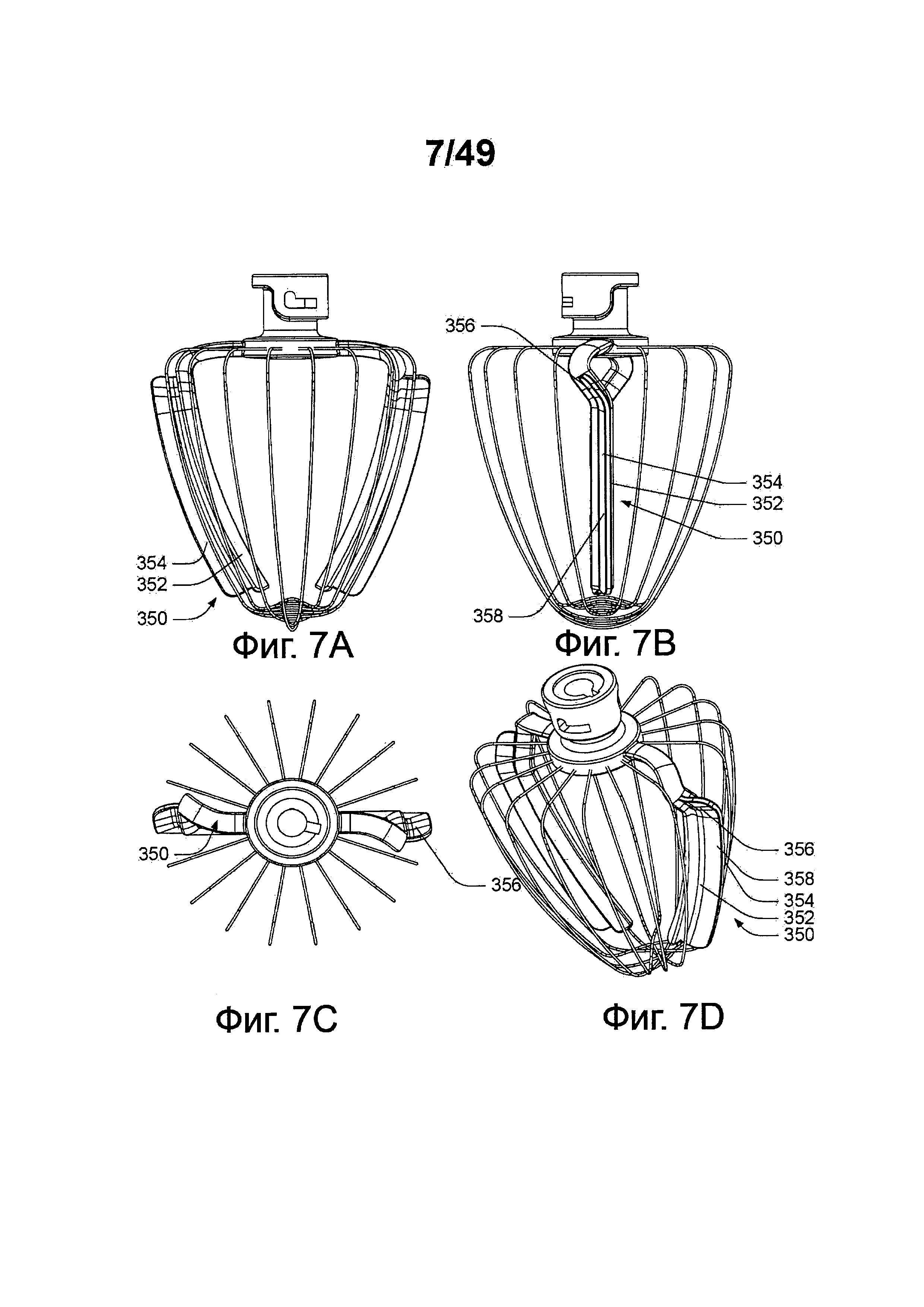
На фиг. 7A-7D показан альтернативный вариант выполнения взбивающего приспособления со скребком, согласно которому скребок 350 (обычно содержащий плечи 352 и/или лопасти 354) содержит значительно отогнутый участок 356 сброса в верхней области для направления и/или отвода остатков на стенке чаши назад в смесь и по существу прямой участок 358, который по существу вертикален для оказания сопротивления подъему смеси относительно стенки чаши.
Как показано на фиг. 8, противоположные элементы 360 скребка в нижней части могут быть соединены по центру перемычкой 362. Перемычка может быть смещена выше скрещения 364 проволочных элементов, чтобы не контактировать с ним. Перемычка обеспечивает повышение структурной целостности, уменьшение изгиба элементов скребка и улучшение контакта со стенкой чаши.
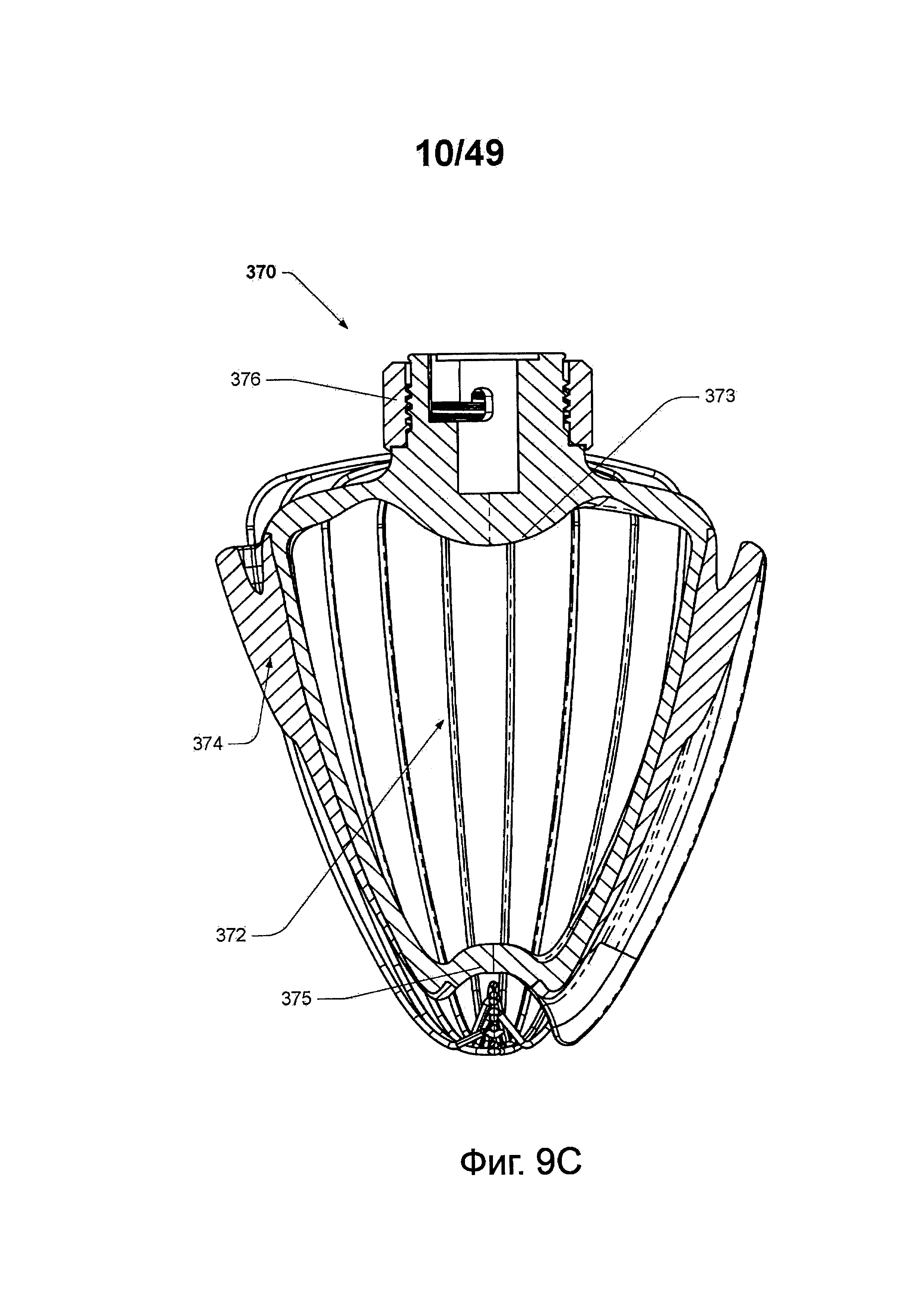
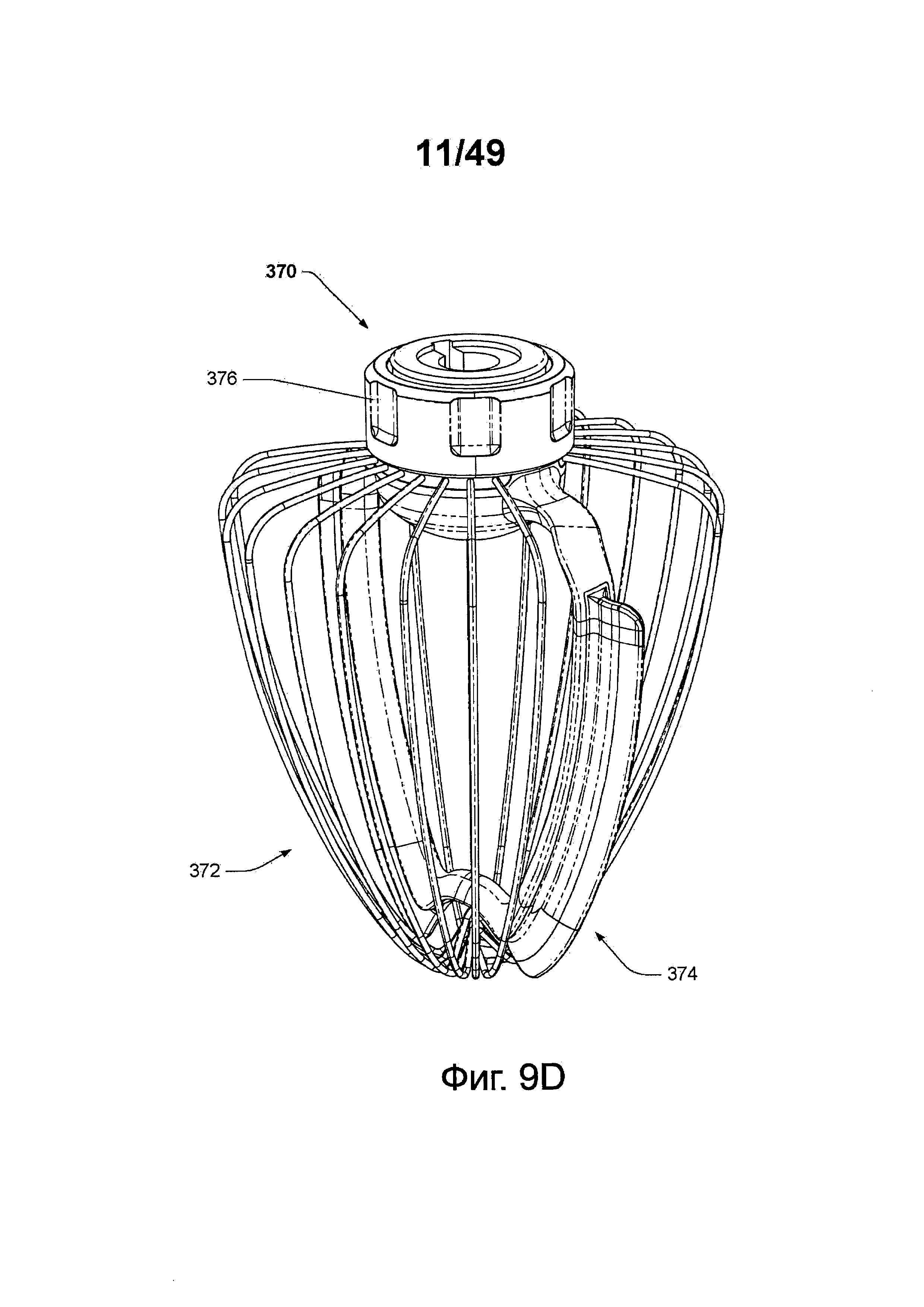
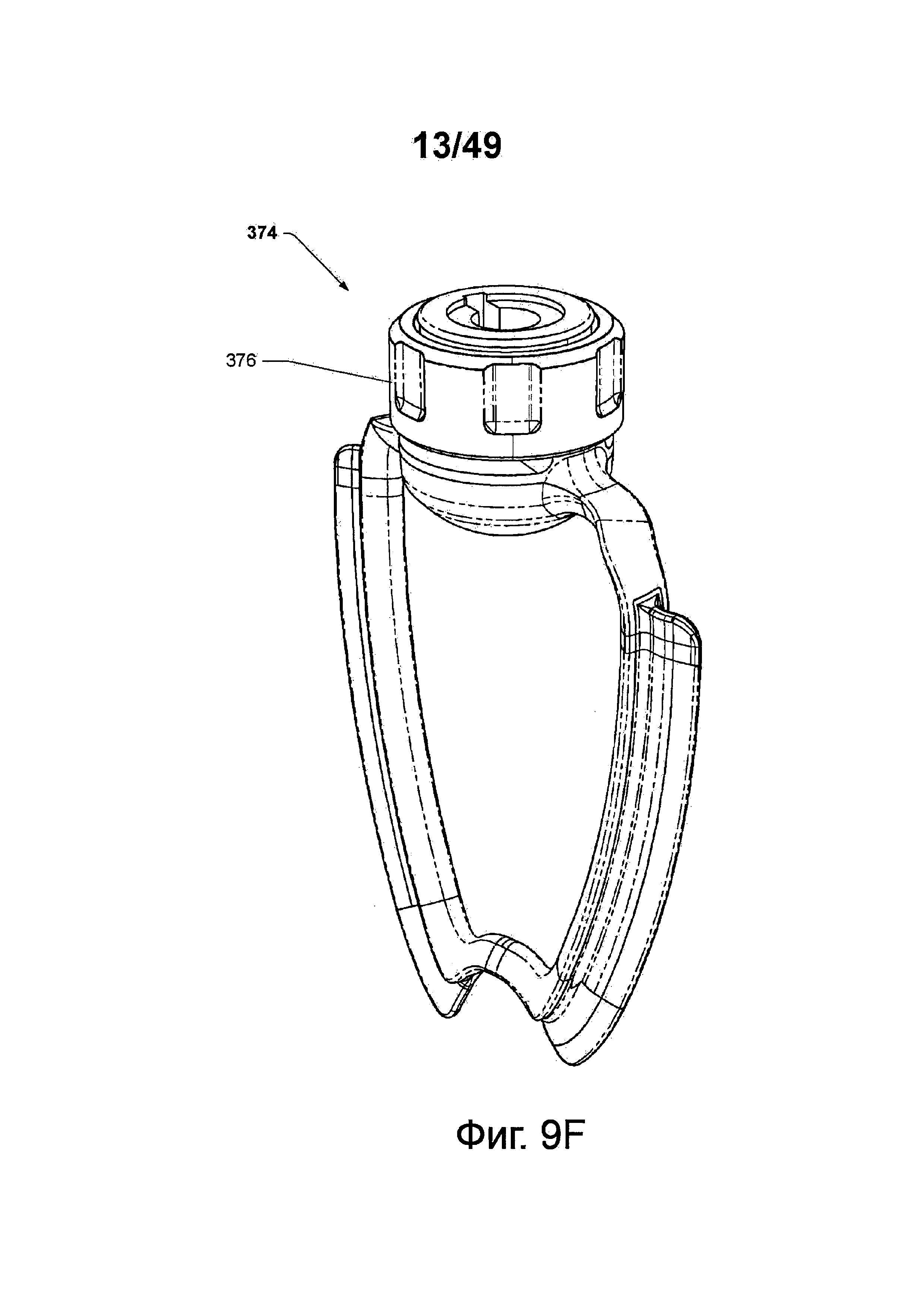
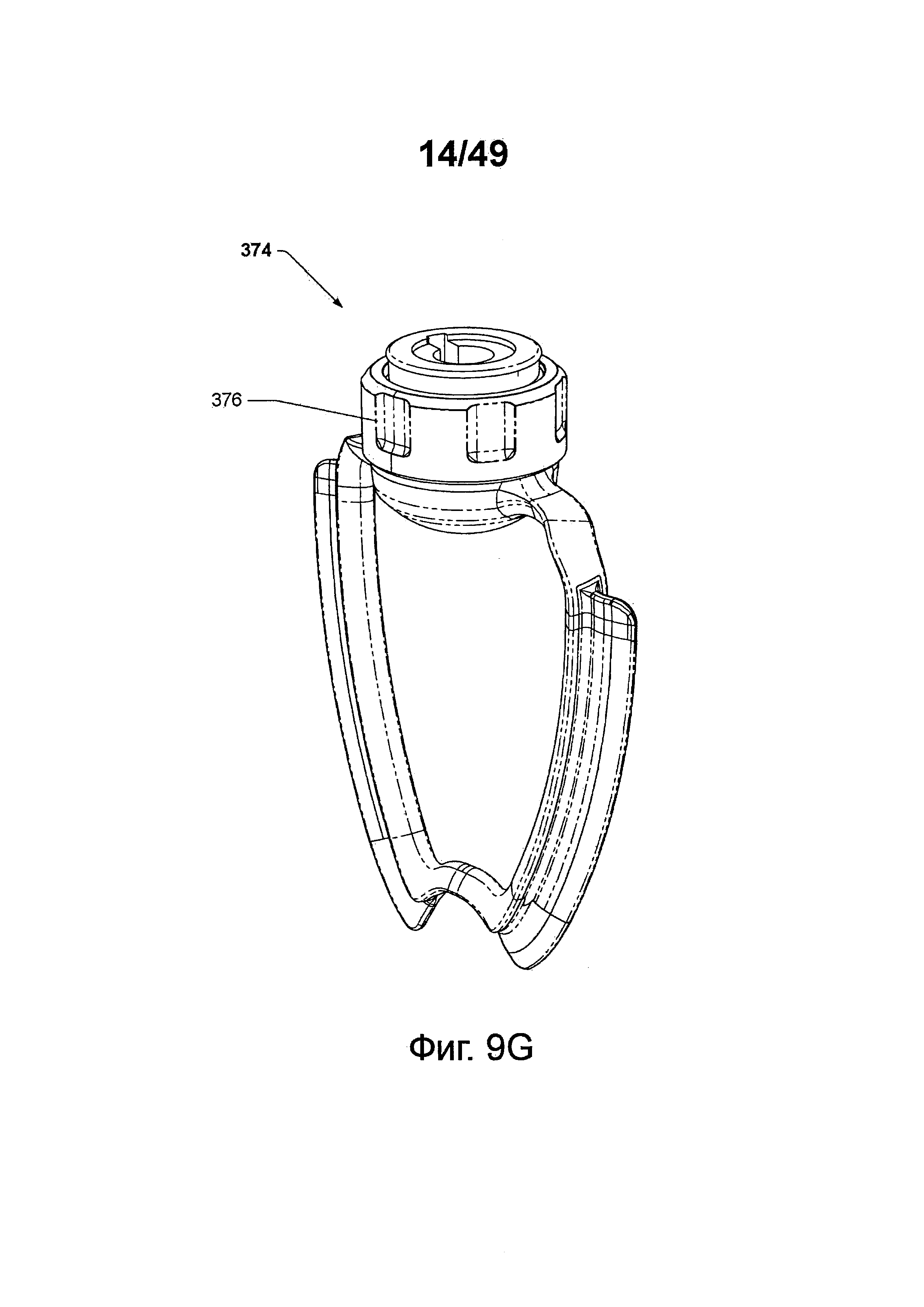
На фиг. 9A-9G показан альтернативный вариант выполнения взбивающего приспособления 370 со скребком, согласно которому венчик 372 разъемно присоединен к скребку 374. Блокирующий элемент 376, взаимодействующий со скребком 374, может удерживать венчик 372. К соединительному узлу (соединительный узел может быть выполнен в виде байонетного соединения) примыкает L-образный фланец 373, который охватывается блокирующим элементом 376. Блокирующий элемент 376 сцеплен по резьбе со скребком 374 и может поворачиваться, чтобы опуститься до положения над L-образным фланцем 373 для удержания венчика 372. Венчик 372 может быть разъемно соединен с одним из несколькими противоположными элементами скребка.
В альтернативных вариантах приспособление может включать в себя по отдельности или в любом сочетании:
- дугообразную перемычку (перемычку 375, как показано на фиг. 9А) для взаимного соединения противоположных плеч, обеспечивающую большую конструктивную целостность и возможность расположения внутри венчика;
- удлиненные лопасти скребка (лопасти 374, как показано на фиг. 9А) могут увеличивать контакт со стенкой и улучшать перемешивание остатков в нижней части чаши;
- под соединительным узлом может быть расположен выпуклый элемент (373, как показано на фиг. 9А), чтобы способствовать отводу вязких остатков назад в смесь;
- лопасти скребка (лопасти 374, как показано на фиг. 9В) могут быть направлены таким образом, чтобы они не были перпендикулярны плечам, улучшая надежность контакта;
- зажимное кольцо (блокирующий элемент 376, как показано на фиг. 9С) для разъединяемых элементов, размер которого обеспечивает надежный захват при отсоединении и прикреплении;
- венчик (372, как показано на фиг. 9С) может удерживаться узлом, когда он присоединен к головке миксера, даже когда зажимное кольцо ослаблено для снижения риска опасных вариантов снятия при использовании.
Очевидно, что показанное взбивающее приспособление со скребком подходит для использования с настольным миксером.
Потребитель энергии привода
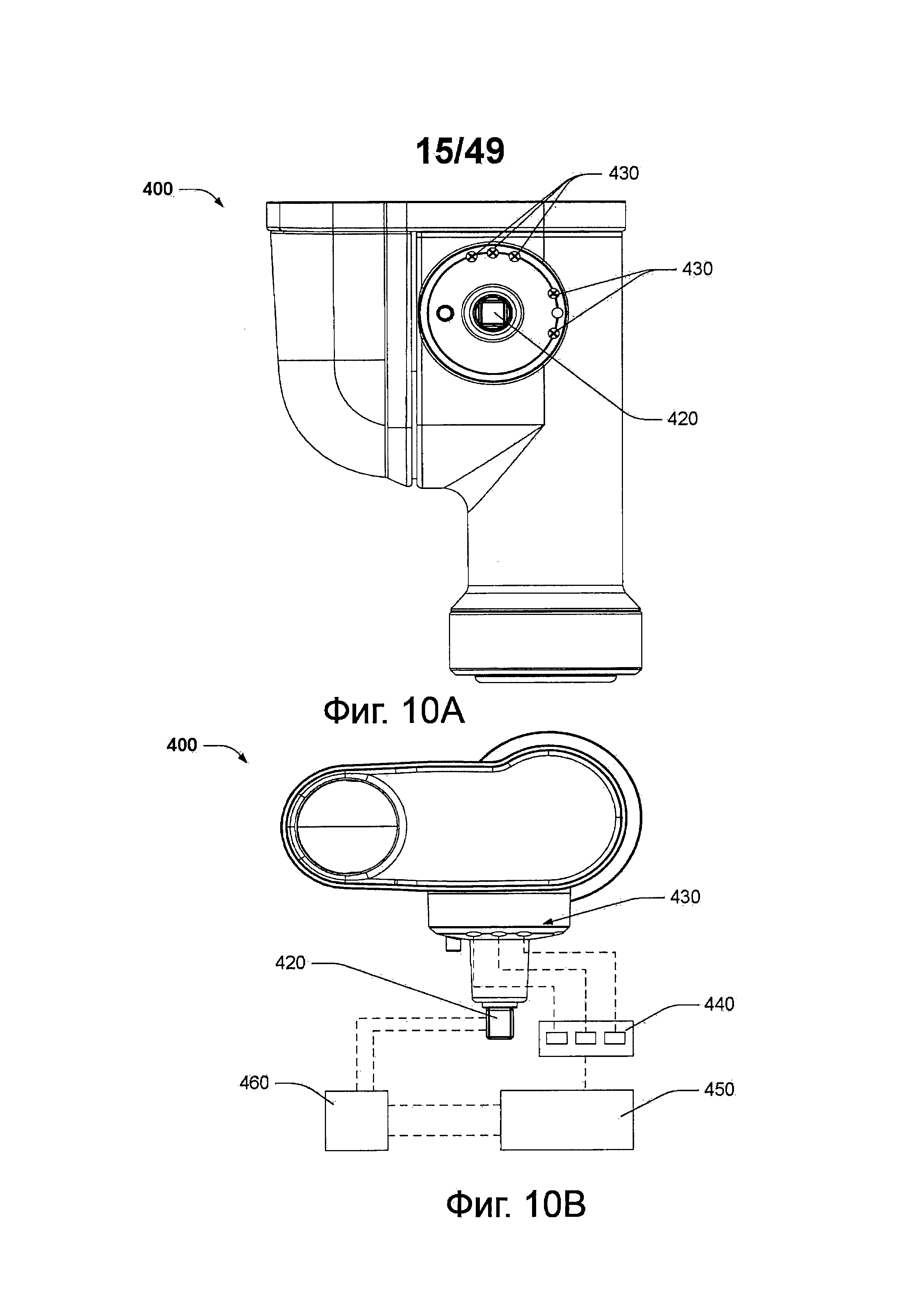
Варианты выполнения устройства 400, потребляющего энергию привода, показаны на фиг. 10А-20. Устройство, потребляющее энергию привода, может быть разъемно присоединено к настольному миксеру 410.
Как показано на фиг. 10А и 10В, такое устройство может содержать ведомый соединительный элемент для отбора мощности привода, и может быть присоединено к настольному миксеру вертикально или горизонтально. Соединительный элемент 420 в виде штыря и/или гнезда может быть выполнен на насадке для приема ведущего соединительного элемента настольного миксера. Ориентация насадки может быть распознана механическими средствами для задания режима работы электродвигателя настольного миксера. В альтернативном варианте ориентация может распознаваться пассивно с использованием одного или нескольких магнитов для задания режима работы электродвигателя. Например, ориентация может быть закодирована путем размещения магнитов в заранее определенных местах 430. Опорные места для сигналов могут быть совмещены с периферийным краем кольца, но могут быть использованы другие позиционные компоновки.
Электронное средство распознавания может включать в себя элемент, установленный по существу заподлицо с насадкой, и распознавание происходит внутри головки миксера. Это позволяет обеспечить бесконтактное распознавание ориентации и расположения насадки по отношению к головке миксера. Упомянутый выше магнитный элемент может представлять собой средство распознавания. Средство распознавания также может быть использовано для распознавания других насадок на головке миксера, например, венчика со скребком.
Настольный миксер может определять ориентацию присоединенного устройства с помощью нескольких датчиков 440, соответствующих механическому или пассивному способу определения ориентации. Например, для распознавания магнитов на печатной плате могут быть расположены датчики холла. Ориентация может быть закодирована в соответствующем местоположении магнитов, распознаваемых датчиками холла. Однако в эквивалентной конструкции могут быть использованы герконовые выключатели. Посредством приема и идентификации сигналов от датчиков холла можно определить ориентацию устройства. Сигналы ориентация передаются в процессорный блок 450.
Процессорный блок 450 предназначен для приема сигналов ориентации и их сравнения с заранее заданной справочной таблицей для определения ориентации устройства, потребляющего энергию привода. Справочная таблица может содержать соответствующие данные о режимах работы электродвигателя 460 и ведомого соединительного элемента 420. Процессорный блок 450 может управлять питанием электродвигателя. Электродвигатель может принимать и возвращать данные относительно его использования.
Например, ориентация или компоновка (макароны, мясорубка, измельчитель или отжим сока), определенные процессорным блоком, могут привести к тому, что процессорный блок предложит пользователю только выбранные доступные скорости из всех имеющихся.
Пользователю может быть предоставлена возможность заменить заводские настройки для некоторых насадок, если по инструкции в основном не подразумевается создание вредного состояния для электродвигателя или операции. Например, при использовании стандартной смесительной головки для взбивания при определенных заранее режимах работы электродвигателя возможно превышение скорости или продолжительности взбивания, приводящее к опаданию смеси, и пользователь может использовать параметры вне обычных настроек.
На фиг. 11А показана первая ориентация, и на фиг. 11В - вторая. Для вертикальной и горизонтальной насадки могут быть использованы один или несколько контрольных сигналов (магниты в заранее определенном местоположении 430) для управления режимом работы электродвигателя. Местоположение контрольных сигналов может быть совмещено с периферийным краем кольца, но могут быть использованы другие компоновки. Если все контрольные местоположения не дают сигнала, можно предположить, что насадка находится в нерабочих условиях (или аналог насадки), или насадка не присоединена к приводу.
На фиг. 11А показана первая ориентация, в которой могут быть приведены в действие первый измерительный башмак и третий измерительный башмак. На фиг. 11В показана вторая ориентация, в которой насадка повернута (в этом случае на угол 90°), вызывая срабатывание первого измерительного башмака, второго измерительного башмака и третьего измерительного башмака. Соответственно, разные наборы параметров использования доступны для пользователя посредством процессорного блока.
На фиг. 11С показан альтернативный вариант с использованием узла 480 «кольца переключения», содержащего выключатели 482 с подпружиненными шариками. Вдавливание шарика 483 замыкает соответствующий контакт на печатной плате и подает в процессорный блок сигнал о том, что выключатель сигнала ориентации активирован. Шарик, который не вдавлен (в этом примере центральный шарик), считывается модулем процессора, как неактивный. Соответственно, кольцо 484, расположенное на насадке, может иметь встроенную опорную систему, использующую выемки для приема шарикового выключателя. Набор выемок тем самым меняет контрольный сигнал датчика, расположенного на печатной плате. Как и в указанном выше случае, любая фирменная насадка должна генерировать по меньшей мере один сигнал ориентации (при наличии по меньшей мере одной выемки), поскольку насадка без вдавливания (все выключатели нажаты) может рассматриваться, как насадка конкурентов и/или насадка без рабочих ограничений.
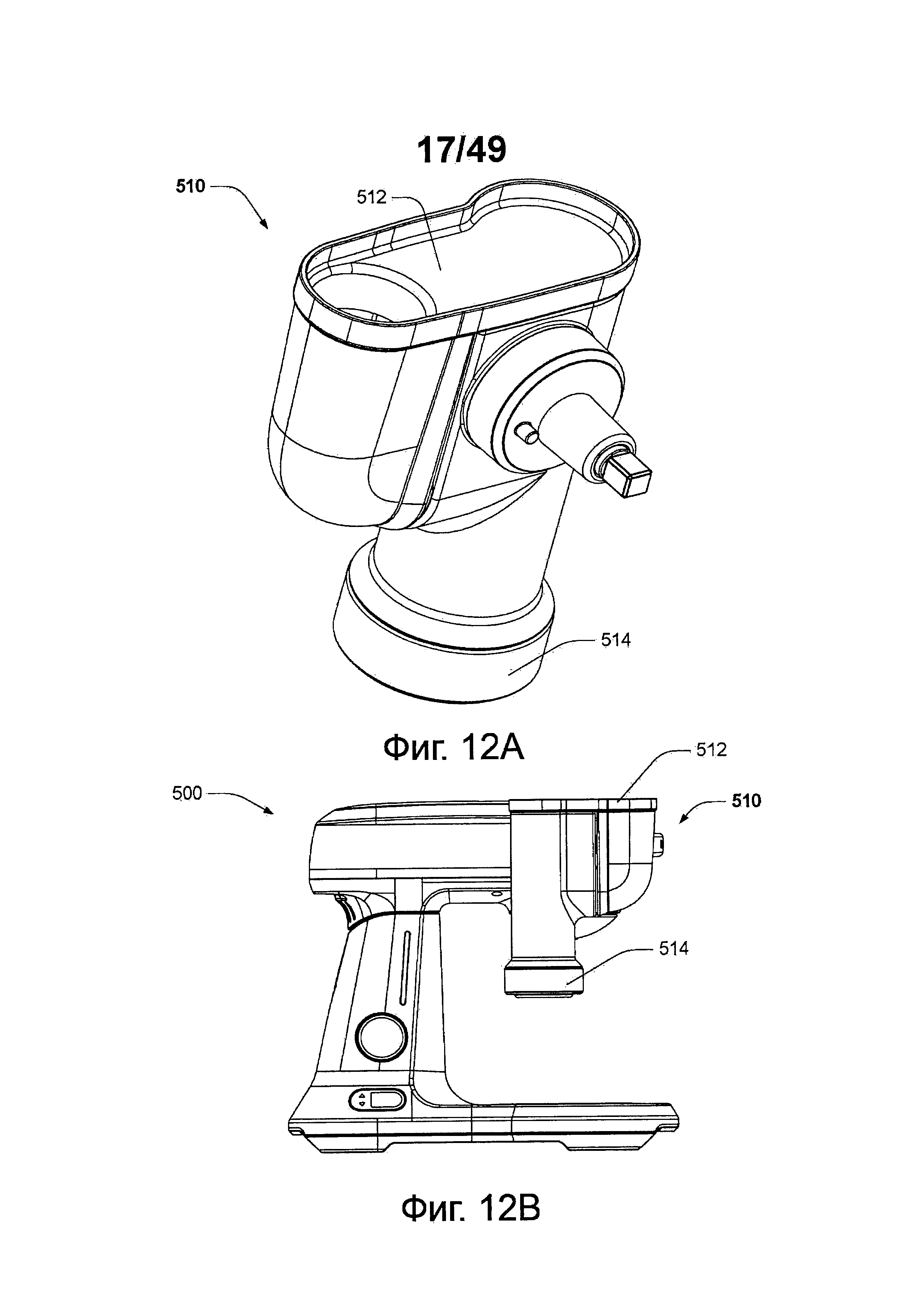
На фиг. 12А и 12В показан вариант выполнения (или компоновки) насадки 510 в виде экструдера для макарон для использования с настольным миксером 500. В этом варианте экструдер для макарон содержит загрузочную воронку 512 для макаронного теста (лоток и воронка) и головку 514 со сменной головкой экструдера для регулировки типа и размера макаронного изделия. Эта насадка обычно не требует контрольной обратной связи с контроллером для дискретного управления электродвигателем.
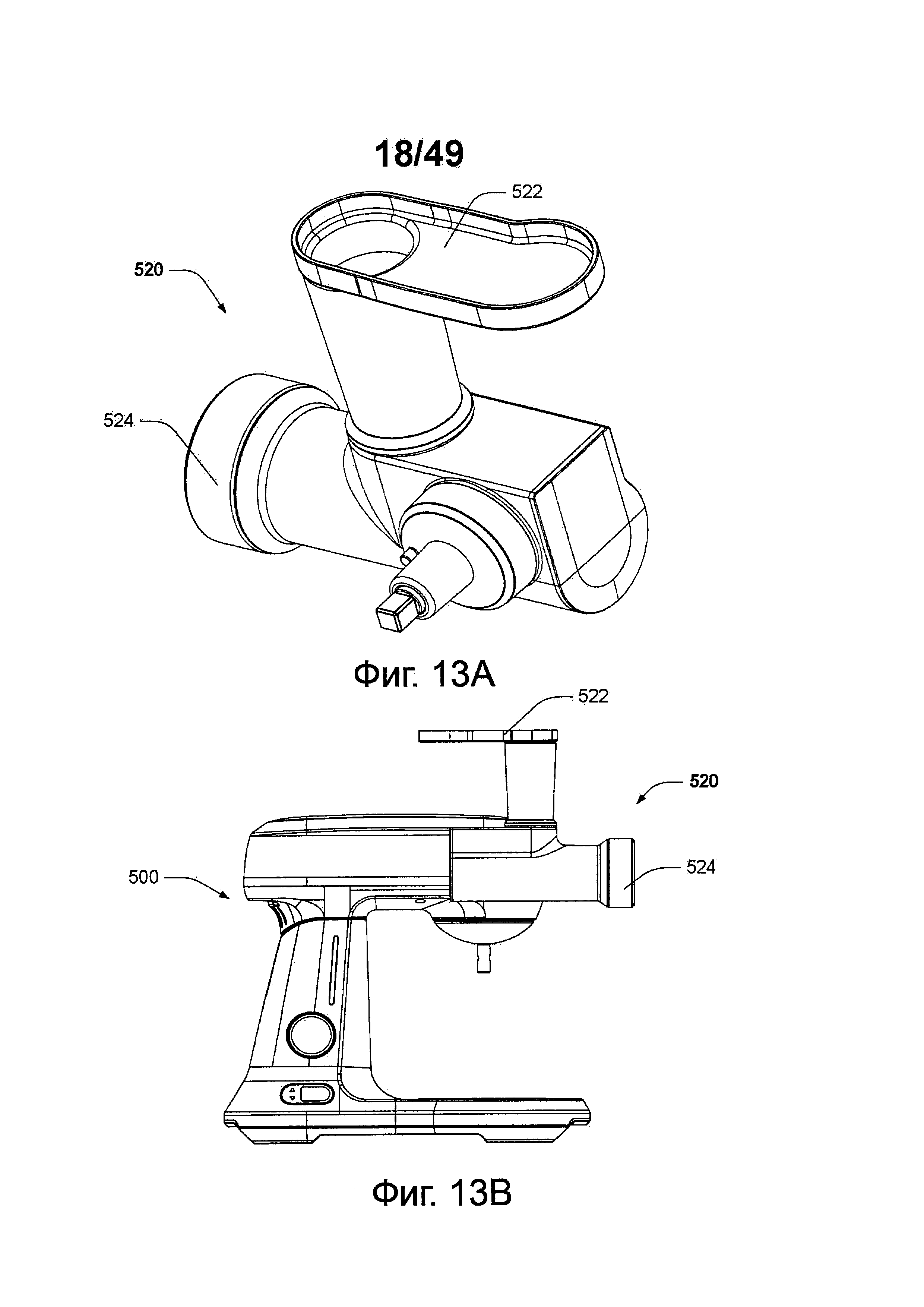
На фиг. 13А и 13В показан вариант выполнения (или компоновки) насадки 520 в виде мясорубки для использования с настольным миксером 500. В этом варианте мясорубка содержит загрузочную воронку 522 для мяса (лоток и воронка) и головку 524 со сменной головкой экструдера для регулировки типа и размера мясного продукта.
На фиг. 14А и 14В показан вариант выполнения (или компоновки) насадки 530 в виде экструдера для колбасы для использования с настольным миксером 500. В этом варианте мясорубка содержит воронку 532 для мяса (лоток и воронка) и головку 534 со сменной головкой экструдера для регулировки типа и размера колбасного изделия.
Три приведенные выше примера не являются всеобъемлющими. Настоящее изобретение также может быть использовано в других насадках для приготовления пищи, например в кофемолках или мельницах для пряностей.
На фиг. 15А-15С показано, что каждая из насадок 550, 552, 554 экструдера для макарон, мясорубки и экструдера для колбасы обладает общей основной частью 558 (сплошные линии) и некоторым количеством различных частей (штриховые линии), которые могут быть использованы с основной частью насадки для создания разных компоновок. Штифт 560, расположенный на кольце 562, может быть отрегулирован в соответствии с нужной компоновкой. Штифт может сцепляться с настольным миксером для образования сопряженной ориентации насадки (горизонтальной или вертикальной) - в которой кольцо может поворачиваться на угол 90° по отношению к основной части до заранее определенной ориентации.
Указанные выше насадки представлены только в качестве примера. Специалистам в этой области техники должно быть очевидно, что указанные принципы могут быть применены и осуществлены в рамках многих других форм насадок.
На фиг. 16А и 16В показан корпус 600 приспособления с одним штифтом, в котором поворот кольца 610 (и штифта 611) ограничен углом в 90° между первым положением 612 и вторым положением 614. Этот вариант конструкции имеет две ориентации и один штифт, причем штифт может поворачиваться в соответствии с нужной ориентацией.
Как показано на фиг. 16В, к корпусу прикреплена крышка 620 приводного механизма (например, с помощью 4 винтов). Она удерживает главный вал 622 и подшипники (упорный подшипник 623 и обычные подшипники 624, 625). Запорное кольцо 626 прикреплено (например, с помощью 3 винтов) к поворотному кольцу 627. Узел, состоящий из поворотного и запорного колец, может быть надвинут на крышку приводного механизма, которая запирает деталь 628 подшипника с защелкой на месте, и удерживается в правильном положении с помощью четырех деталей с защелкой. Поворот ограничен углом в 90° угловой стопорной деталью 629. Установочный штифт представляет собой деталь, запрессованную в поворотное кольцо.
На фиг. 17А и 17В показан корпус 630 насадки с конструкцией с несколькими штифтами, в которой кольцо 631 содержит штифты, которые можно втолкнуть внутрь, если они не нужны. Показаны первый установочный штифт 632 для одного угла и второй установочный штифт 634 для другого угла. В этом варианте конструкция определяет две ориентации, каждая из которых образована одним из двух штифтов. На настольном миксере имеется одно отверстие, в которое может вставляться штифт. Штифт, который не нужен, будет вдвигаться по мере того, как насадка надвигается на настольный миксер, а штифт, который нужен, будет оставаться выдвинутым и входить в отверстие на миксере, определяя ориентацию.
Как показано на фиг. 17В, крышка 640 приводного механизма прикреплена к корпусу. Она удерживает главный вал 642 и подшипники (упорный подшипник 653 и обычные подшипники 624, 625). В полостях установочных штифтов расположены пружины 646 для смещения наружу соответствующего установочного штифта (например, 634). Поверх крышки приводного механизма размещено кольцо 648 для удержания установочных штифтов. Для присоединения кольца и крышки приводного механизма к корпусу обычно используются винты, которые проходят через крышку приводного механизма и притягивают кольцо к корпусу, сжимая узел.
На фиг. 18A-18D показана насадка 660, в которой приводной механизм включает в себя главный вал 662, присоединенный к червячному приводу 663 (поддерживается упорным подшипником 664), и шнек 665. Узел 666 головки содержит кольцо, головку и экран.
На фиг. 19 показан вариант выполнения конструкции 670, в которой насадка 672 имеет один штифтом 673, а настольный миксер имеет два принимающих отверстия. Каждое отверстие соответствует конкретной ориентации. Пользователь выбирает требуемую ориентацию и выравнивает штифт в соответствии с этой ориентацией.
Очевидно, что показанный потребитель энергии привода подходит для использования с настольным миксером.
Устройство и способ управления питанием электродвигателя
Настольные миксеры обычно обладают универсальным электродвигателем небольшой мощности (например, номиналом 350 Вт), причем:
- при низких скоростях (1-3) с высокой нагрузкой выходная скорость не может поддерживаться;
- при высоких скоростях с обычной нагрузкой выходная скорость не может поддерживаться из-за ограничения крутящего момента электродвигателя.
Размер электродвигателя должен быть тщательно выбран для минимизации риска того, что ротор электродвигателя будет заблокирован под нагрузкой, вызывая резкий подъем температуры двигателя. Зубчатая передача может быть повреждена, если блок запущен на высокой скорости с высокой нагрузкой.
Более мощные универсальные электродвигатели при низких настройках (1-3) с тяжелой нагрузкой могут поддерживать постоянную выходную скорость, но температура электродвигателя может повыситься быстрее, чем у меньшего электродвигателя при управлении скоростью с обратной связью обычной, за счет более высокой входной мощности электродвигателя. У этого электродвигателя скорость саморазогрева выше, а эффективность ниже, чем у небольшого электродвигателя. Разрыв в скорости между установленной низкой скоростью и скоростью при самой высокой эффективности больше, чем для небольшого электродвигателя. При установке более высоких скоростей температура электродвигателя постепенно повышается в допустимых пределах. Эффективность электродвигателя выше. Для настройки более высокой скорости с большой нагрузкой крутящий момент и скорость, создаваемые электродвигателем, могут вызвать повреждение шестеренок, например, срезание их зубьев.
Универсальный электродвигатель, который аналогичен по размеру меньшему электродвигателю, не может обеспечивать достаточный крутящий момент для характеристик настроек низкой скорости при тяжелой нагрузке с малым повышением температуры электродвигателя. Повышение температуры электродвигателя медленнее, чем у большого универсального электродвигателя за счет его меньшего номинала мощности. Для настроек высокой скорости этот электродвигатель не может обеспечивать достаточный крутящий момент для соответствия настройке скорости при обычной нагрузке.
В основном управление универсальным электродвигателем настольного миксера может включать в себя один из двух способов управления с обратной связью:
(a) Симисторная управляющая схема ограничения мощности (в ваттах) с центробежным выключателем электродвигателя, обеспечивающим обратную связь по скорости.
(b) Симисторная управляющая схема с датчиком холла, обеспечивающим обратную связь по скорости.
Очевидно, что ограничение мощности может быть обеспечено с помощью управления по углу зажигания симистора.
На фиг. 20А-20С, за счет выборочного переключения симистора при разных сдвигах фаз можно регулировать или устанавливать среднюю мощность (в ваттах), подаваемую на электродвигатель. Заштрихованная область представляет мощность, подаваемую на электродвигатель (когда симистор активен). При этом осуществляется выборочный доступ к участку кривой переменного тока источника входной мощности.
На фиг. 20А показан относительно малый сдвиг фаз для выборочно активируемого симистора, переключаемого до перехода через ноль. Очевидно, что заштрихованная область охватывает большую часть синусоидальной кривой 700 напряжения - тем самым обеспечивая на выходе относительно высокую подаваемую мощность.
На фиг. 20В показан относительно промежуточный сдвиг фаз для выборочной активации симистора, переключаемого посередине двух переходов через ноль. Очевидно, что заштрихованная область покрывает половину синусоидальной кривой 702 напряжения - тем самым обеспечивая на выходе относительно умеренную подаваемую мощность.
На фиг. 20С показан относительно большой сдвиг фаз для выборочной активации симистора, включаемого после перехода через ноль. Заштрихованная область охватывает относительно малую часть синусоидальной кривой 704 напряжения - тем самым обеспечивая на выходе относительно низкую подаваемую мощность.
На фиг. 21A-21D показано, что путем использования управления с выборочной отсечкой кривой переменного тока симистора можно управлять или устанавливать среднюю мощность (в ваттах), подаваемую на электродвигатель.
На фиг. 21А показана вся кривая 750 напряжения переменного тока. Процессорный блок может обнаруживать переход через ноль переменного тока, и включать/выключать симистор на один или более полупериодов синусоидальной кривой переменного тока.
На фиг. 21В показан пример кривой 752 напряжения с относительно малой отсечкой - удален один полупериод из двенадцати полупериодов, мощность, подаваемая за счет формы кривой напряжения, обладает относительно высоким значением.
На фиг. 21С показан пример кривой 754 напряжения с 50% отсечкой - удалены шесть полупериодов из общего числа двенадцать полупериодов, активная мощность, обеспечиваемая формой кривой напряжения, составляет промежуточную величину.
На фиг. 21D показан пример кривой 756 напряжения с относительно высокой отсечкой кривой - удалены восемь полупериодов из общего числа двенадцать полупериодов, активная мощность, обеспечиваемая формой кривой напряжения, составляет относительно низкое значение.
Вариант выполнения симисторной управляющая схемы ограничения мощности (в ваттах) с центробежным выключателем электродвигателя, обеспечивающим обратную связь по скорости, приведен только в качестве примера. В этом варианте имеются три уровня мощности, ограниченные по задающему контуру симистора для ограничения мощности электродвигателя до 80%, 75% и 70%. Мощность в процентах дана путем настройки угла зажигания симистора или его включения с заранее заданным временем задержки после перехода через ноль первой половины периода синусоидальной кривой переменного тока подачи:
- 80% позволяют повысить скорость электродвигателя, если скорость электродвигателя ниже целевой скорости.
- 85% будут использоваться для целевой скорости.
- 77% могут снижать скорость электродвигателя, если скорость электродвигателя выше целевой скорости.
Центробежный выключатель может быть установлен на валу электродвигателя для активации контактных переключателей для установки уровня ограничения мощности симистора в управляющей схеме. Без переключения контакта электродвигатель будет обладать мощностью 85%. С первым контактом переключателя электродвигатель будет обладать мощностью 80%. Расстояние между центробежным выключателем и первым контактом выключателя будет определять выходную скорость блока. Со вторым контактом выключателя электродвигатель будет обладать мощностью 75% для работы блока.
Очевидно, что простая симисторная управляющая схема с механической настройкой скоростей обладает меньшим числом электронных компонентов для управления скоростью, но обеспечивает ограниченный уровень настройки скорости и ограниченный уровень регулировки мощности.
Вариант выполнения симисторной управляющей схемы ограничения мощности (в ваттах) с обратной связью по скорости с использованием датчика холла также приведен только в качестве примера. В этом варианте выходная скорость контролируется датчиком холла. Мощность, подаваемая на электродвигатель, регулироваться симистором посредством сравнения с расчетом по управляющей интегральной схеме. Регулировка мощности может быть обеспечена либо управлением углом зажигания симистора, либо отсечкой кривой переменного тока симистора. Будет очевидно, что при малой нагрузке минимальная мощность будет приложена к электродвигателю для генерирования требуемого крутящего момента - в то время как при тяжелой нагрузке полная мощность будет приложена к электродвигателю для генерирования требуемого крутящего момента и скорости. В этом варианте электродвигатель может получать полную мощность для использования мощности электродвигателя, и скорость электродвигателя может поддерживаться, пока достаточны характеристики электродвигателя. С достаточным размером электродвигателя выходная скорость блока может поддерживаться для всех настроек скорости. Однако при тяжелой нагрузке при настройке низкой скорости на электродвигатель будет подаваться полная или почти полная мощность, вызывая быстрый рост температуры электродвигателя (из-за низкой эффективности при низкой скорости с высокий выходным крутящим моментом). При настройке высокой скорости с установкой низкой скорости для таких нагрузок, как вымешивание теста, крутящий момент и скорость, генерируемые электродвигателем, вызывают повреждение шестерен.
Устройство и способ управления мощностью электродвигателя с задающим симистором включает установку разных ограничений мощности, применимых к электродвигателю для каждой из нескольких настроек скорости, что позволяет достичь высокую скорость блока на выходе, исключить быстрый рост температуры электродвигателя при тяжелой нагрузке при настройке низкой скорости и исключить повреждение шестерен блока при настройке высокой скорости с нагрузкой с установленной низкой скоростью.
Ограничение мощности устанавливается путем настройки/предварительного определения минимального угла зажигания симистора, управляемого процессорный блоком с датчиком холла в качестве обратной связи по скорости. Угол зажигания симистора можно отрегулировать выше минимального угла в соответствии с привязкой к скорости блока на выходе к установленной целевой скорости настройки скорости. В альтернативном варианте ограничение мощности может быть задано установкой или предварительным определением максимального значения (или процентной доли) разрешенных полупериодов переменного тока (например, по нескольким циклам переменного тока). Остальные половинные циклы переменного тока затем могут быть разрешены или заблокированы в соответствии с привязкой выходной скорости блока для задания установленной целевой скорости для настройки скорости.
Ограничение мощности может быть установлено непосредственно выше требования мощности при обычной нагрузке для скорости и крутящего момента на выходе блока. При малой нагрузке и обычной нагрузке электродвигатель может работать на минимальной мощности, требуя большего времени для достижения температурного предела. Обычно это время для достижения температурного предела электродвигателя установлено как максимальное время работы для соответствующей настройки скорости. При тяжелой нагрузке электродвигателю может потребоваться максимальная мощность для достижения требуемой скорости, с ограничением активной мощности управление ограничивает мощность электродвигателя для достижения целевой скорости, при этом позволяя электродвигателю работать относительно дольше до достижения температурного предела.
Очевидно, что ограничение активной мощности может быть установлено непосредственно ниже требования активной мощности при обычной нагрузке для крутящего момента блока на выходе после времени по рецептуре. После времени по рецептуре блок больше не требует подачи крутящего момента для установленной нагрузки, но требуется продолжение работы. С этим дополнительным ограничением активной мощности блок может работать дольше до достижения температурного предела его электродвигателя.
На фиг. 22 показана блок-схема 800 способа управления мощностью электродвигателя. Способ включает в себя следующие этапы.
Этап 810: получение данных, указывающих соответствующий предел мощности для применения для электродвигателя - для каждой из нескольких выбираемых пользователем настроек скорости.
Этап 820: определение скорости электродвигателя и ее сравнение со скоростью, выбранной пользователем.
Этап 830: если текущая скорость ниже выбранной пользователем, увеличивают мощность, подводимую к электродвигателю до соответствующего предела.
На фиг. 23 показана блок-схема 900 способа управления мощностью электродвигателя. Способ включает в себя следующие этапы.
Этап 902: включение устройства пользователем.
Этап 904: на устройство подано питание.
Этап 906: определение установленной пользователем скорости.
Этап 908: после определения выбранной пользователем настройки скорости (например, в диапазоне от низкой скорости «1» до высокой скорости «12») определяется соответствующий угол зажигания или максимальный предел мощности.
Этап 910: контроль настройки скорости - если устройство работает на этой установленной скорости, вернуться к этапу 902 для продолжения слежения за выбранной пользователем скоростью; если устройство не работает на установленной скорости, перейти к этапу 912.
Этап 912: определение того, является ли скорость устройства ниже, чем установленная скорость, если ниже, перейти к этапу 914, в противном случае перейти к этапу 916.
Этап 914: уменьшить угол зажигания - но не меньше ранее определенного минимального угла зажигания (для повышения скорости электродвигателя), вернуться к этапу 902 для продолжения контроля выбранной пользователем скорости.
Этап 916: увеличить угол зажигания (для снижения скорости электродвигателя), вернуться к этапу 902 для продолжения контроля выбранной пользователем скорости.
Если пользователь не меняет настройку скорости, та же самая целевая скорость будет прослеживаться для настройки угла зажигания симистора для увеличения/уменьшения скорости электродвигателя до целевой скорости на выходе блока. При повышенной нагрузке, если скорость не соответствует целевой скорости, угол зажигания не может быть уменьшен ниже минимального предела для защиты передаточного механизма и предотвращения перегрева электродвигателя во время работы.
Настройка скорости определяется разными характеристиками перемешивания от вымешивания теста или замеса тортов при низкой скорости перемешивания при тяжелой нагрузке до взбивания яичных белков при высокой скорости перемешивания при низкой нагрузке. Имеются четыре диапазона скоростей от тяжелой нагрузки до легкой: диапазон 1 - валяние с вымешиванием (скорости 1, 2, 3), диапазон два - легкое перемешивание (скорости 4, 5, 6), диапазон 3 - взбивание крема (скорости 7, 8, 9) и диапазон четыре взбивание сливок (скорости 10, 11, 12).
Сдвиг фаз может быть заранее определен для управления более медленным подъемом температуры электродвигателя и максимальной мощностью узла зубчатой передачи при одной настройке скорости.
Например, для диапазона один:
- подъем температуры электродвигателя записывается при нагрузке наиболее густого теста без предела по мощности, с 75% пределом по мощности, с 65% пределом по мощности и с 55% пределом по мощности;
- на основе продолжительности достижения электродвигателем температуры от 25°С до 120°С определяется управление мощностью в процентах с наибольшей продолжительностью;
- выбран предел активной мощности 65%, так как это обеспечивает большую продолжительность до достижения электродвигателем его температурного предела;
- дополнительное снижение предела активной мощности в процентах может увеличить изменение блокировки ротора электродвигателем для более быстрого нагрева электродвигателя;
- по истечении времени рецептуры предел активной мощности в процентах может быть дополнительно снижен ниже 65% для продолжения работы электродвигателя при одновременном сокращении его нагрева;
- узел зубчатой передачи может справляться с максимальной нагрузкой и настройкой скорости, когда скорость низкая.
Например, для диапазона два:
- подъем температуры электродвигателя записывается при нагрузке наиболее густого теста без предела по мощности, с 75% пределом по мощности, с 65% пределом по мощности и с 55% пределом по мощности;
- на основе продолжительности достижения электродвигателем температуры от 25°С до 120°С определяется управление мощностью в процентах с наибольшей продолжительностью;
- выбран предел активной мощности 75%, так как это обеспечивает наибольшую продолжительность до достижения электродвигателем его температурного предела. Обращение к более высокому пределу активной мощности для диапазона один позволяет лучше охладить электродвигатель;
- по истечении времени рецептуры предел активной мощности в процентах может быть дополнительно снижен меньше 65% для продолжения работы электродвигателя при одновременном сокращении его нагрева;
- узел зубчатой передачи может справляться с максимальной нагрузкой и настройкой скорости, когда скорость низкая.
Например, для диапазона три:
- узел зубчатой передачи не может справляться с рецептурой самого густого теста без предела по мощности и 75% предела по мощности;
- подъем температуры электродвигателя записывается при нагрузке наиболее густого теста при 65% пределе по мощности и 55% пределе по мощности.
- на основе продолжительности достижения электродвигателем температуры от 25°С до 120°С определяется управление мощностью в процентах с наибольшей продолжительностью;
- выбран предел 65% по мощности, так как это обеспечивает наибольшую продолжительность до достижения электродвигателем его температурного предела и обеспечивает повышенный крутящий момент привода по сравнению с 55% пределом по мощности;
- по истечении времени рецептуры предел активной мощности в процентах может быть дополнительно снижен меньше 65% для продолжения работы электродвигателя при одновременном сокращении его нагрева.
Например, для диапазона четыре:
- подъем температуры электродвигателя записывается при нагрузке наиболее густого теста при 65% пределе по мощности, 55% пределе по мощности и 45% пределе по мощности;
- на основе продолжительности достижения электродвигателем температуры от 25°С до 120°С определяется управление мощностью в процентах с наибольшей продолжительностью;
- выбран предел 45% по мощности, так как это обеспечивает наибольшую продолжительность до достижения электродвигателем его температурного предела и обеспечивает повышенный крутящий момент привода по сравнению с 55% пределом по мощности;
- по истечении времени рецептуры предел активной мощности в процентах может быть дополнительно снижен меньше 65% для продолжения работы электродвигателя при одновременном сокращении его нагрева.
Как показано на фиг. 23:
- Для настройки 1, с углом зажигания, установленным на 49,5°, электродвигатель обладает только примерно 65% полной средней мощности, что может быть достаточно для обычной работы блока для его нагрузки по скорости и крутящему моменту. При аномально тяжелой нагрузке из-за меньшей мощности электродвигателя, температура электродвигателя поднимается медленно (например, в течение 12 минут) по сравнению с отсутствием предела по мощности (например, 5 минут).
- Для настройки 2 с углом зажигания, установленным на 41,4°, электродвигатель обладает только примерно 75% полной средней мощности, что может быть достаточно для обычной работы блока для его нагрузки по скорости и крутящему моменту. При максимальной нагрузке рецептуры теста из-за меньшей мощности электродвигателя, температура электродвигателя поднимается медленно (например, 41 минута) по сравнению с отсутствием предела по мощности (например, 10 минут).
- Для настройки 3 с углом зажигания, установленным на 49,5°, электродвигатель обладает только примерно 65% полной средней мощности, что достаточно для обычной работы блока для его нагрузки по скорости и крутящему моменту.
При аномальной нагрузке (например, нагрузка максимальной рецептуры теста) вероятность поломки зубчатой передачи может быть снижена, и температура электродвигателя также сохраняется ниже соответствующего предела для максимального времени работы блоков.
Очевидно, что для настройки более высокой скорости от 4 до 12 дополнительные пределы по мощности (в ваттах) могут быть использованы для предотвращения поломки зубчатой передачи и превышения температуры электродвигателя.
Также очевидно, что для настольного миксера может быть выбран электродвигатель относительно небольшого размера (например, 550 Вт). Преимущества могут быть следующими:
- увеличение времени работы электродвигателя;
- снижение риска повреждения зубчатой передачи при неподходящей настройки скорости для повышенной нагрузки;
- сохранение требуемой выходной скорости и крутящего момента блока при обычной рабочей нагрузке;
- обеспечение использования большей мощности электродвигателя при одновременном ограничении крутящего момента при использовании для аномально тяжелой нагрузки;
- снижение риска блокировки ротора;
- повышенная эффективность по сравнению с использованием электродвигателя небольшого размера с высоким крутящим моментом.
Управление универсальным электродвигателем может быть, как описано выше, для достижения преимуществ в виде снижения роста температуры электродвигателя и уменьшения риска повреждения зубчатой передачи блока при настройке высокой скорости.
На фиг. 24 представлена схема задающего контура 950 ограничения мощности симистора (в ваттах) с датчиком холла, обеспечивающим обратную связь по скорости. Датчик 952 холла следит за магнитным диском на валу 954 электродвигателя для регистрации скорости электродвигателя и выдает сигнал скорости на процессорный блок 956 (через TR11 958).
Сигнал перехода через ноль передается в процессорный блок 956 (через TR3 960). Симистор 962 управляет (включает/выключает) процессорный блок 956 (через TR7 964), который обеспечивает подачу мощности на электродвигатель. Подача питания переключателя IC 966 режимов генерирует постоянный ток 12 В и 5 В.
Очевидно, что указанные устройство и способ управления мощностью электродвигателя подходят для использования в настольном миксере.
На фиг. 25-35 показаны различные варианты насадок миксера, которые используют взаимозаменяемые рабочие компоненты, работающие в соединении с общим каркасом для приспособлений. Как показано на фиг. 25, каркас 1000 для приспособлений содержит жесткий держатель 1001, который присоединен к втулке 1002 или составляет с ней единое целое. Втулка 1002 предназначена для присоединения к выходному шпинделю миксера. В этом примере в верхней части 1003 каркас 1000 шире, чем в нижней части 1004. Нижний концевой участок каркаса содержит вогнутость или выемку 1005. Каркас 1000 имеет два ниспадающих плеча 1006. Плечи присоединены к втулке 1002 двумя поперечинами 1007. Непрерывная канавка 1008 повторяет и соответствует внешней поверхности втулки 1002, каждой поперечине 1007, каждому плечу 1006 и вогнутости 1005. Канавка предпочтительно центрирована между боковыми сторонами каждой из поперечин, плеч и вогнутости. Как показано на фиг. 25, концевые участки 1009 канавки 1008 проходят, по меньшей мере частично, если не полностью, вдоль вертикального участка втулки 1002.
Канавка 1008 предназначена для приема любой одной или нескольких приспособлений или плеч 1010, 1011 приспособлений. Как показано на фиг. 25, одно приспособление 1010 содержит основную часть 1012, которая предназначена для вставки в канавку 1008. Основная часть 1012 заканчивается парой в основном параллельных удлинений 1013, которые вставляются в тот участок канавок, который проходит вдоль втулки 1002. Удлинения 1013 удерживаются резьбовой крышкой 1014, которая навинчивается поверх резьбы, сформированной на втулке 1002. Таким образом, приспособление 1012 неподвижно и ограничено канавкой 1008. Первое приспособление обладает, например, гибкими или жесткими лопастями 1014 малой ширины, которые проходят вдоль каждого бокового края 1015 приспособления, но не занимают участок приспособления, соответствующий поперечным элементам 1007 или вогнутости 1005. Каждая узкая лопасть 1014 заканчивается скругленным кончиком 1016. Скругленный кончик 1016 проходит ниже самой нижней части основной части приспособления и, таким образом, ниже неработающей части участка 1017 вогнутости, которая вставляется в вогнутую секцию 1005 канавки 1008. Второе приспособление 1017 также обладает основной частью, которая вставляется в канавку и соответствует ее форме, но отличается двумя широкими, гибкими или жесткими скребущими лопастями 1018. Лопасти 1018 шире, чем лопасти 1014. Таким образом, одиночная насадка 1020 миксера может принимать два разных приспособления, каждая с лопастью разной ширины или другой компоновкой лопастей.
Другой способ присоединения приспособления к каркасу 1021 насадки 1022 миксера показан на фиг. 26 и 27. В этом примере конструкция каркаса 1021 аналогична показанной на фиг. 27, но принимающая канавка 1023 для приспособления необязательно проходит через поперечные элементы 1023, как предложено на фиг. 27, срединная канавка в каркасе проходит вдоль обоих плеч 1024 и через нижний сегмент 1025 каркаса приспособления. Как показано на фиг. 26, приспособление 1027 в основном обладает подковообразной формой и обладает гибкими или жесткими лопастями 1028, сформированными на внешних поверхностях каждого из боковых краев 1024. Каждый боковой край или плечо 1024 имеет верхнее окончание 1029. В этом примере верхние окончания 1029 зажаты в области взаимодействия каркаса 1030 (как показано на фиг. 27). Таким образом, приспособление удерживается за счет действия взаимоблокировки, вызванным обжатием или трением. Как показано на фиг. 28 и 29, упомянутое выше средство насадки приспособления на каркас может быть улучшено или по существу заменено магнитным притяжением. Как показано на фиг. 28, либо магниты, либо стальные вставки 1030 могут быть сформированы, например, в верхнем участке каждой из боковых сторон приспособления или, в альтернативном варианте внедрены, запрессованы или вставлены в нижний участок приспособления, расположенный между боковыми краями 1031. Как показано на фиг. 29, каркас обладает сопряженными магнитными или стальными вставками 1032, внедренными, вставленными или запрессованными в соответствующих положениях, чтобы удерживать вставку в обращенной наружу периферийной канавке, сформированной на каркасе 1033.
Как показано на фиг. 30-33, связь между соскребающей лопастью насадки 1040 и основой 1041 для приспособления, к которой он присоединен постоянно, может быть усилена за счет ряда штырьков 1042, запрессованных в основу в области взаимного соединения между основой 1041 и лопастью 1040, или формируемых с этой областью как единое целое. Ряд штырьков включает в себя расположенные с равными промежутками выступающие штырьки 1042, которые расположены внутри канала 1043. Основа состоит из относительно жесткого полимера, такого как сополимер TRITAN™, и лопасть 1040 присоединена к основе из сополимера с помощью, например, эластомера пищевого качества, например, Hi-Tril™ (сантопрен). Как показано на фиг. 30 и 31, основная часть приспособления может быть присоединена к каркасу 1001 способом, аналогичным показанному на фиг. 26-29. В альтернативном варианте, но, не ограничиваясь этим альтернативным вариантом, основанная часть 1044 приспособления может быть присоединена к каркасу 1045 способом, показанным на фиг. 27.
Как показано на фиг. 31А, насадка между основной частью 1045 приспособления и напрессованной на нее лопастью 1046 скребка может быть дополнительно улучшена посредством выполнения штырьков 1047 в виде ряда, дополнительно проходящего по лопасти 1046. В этом примере штырьки 1047 проходят в лопасть 1046 приблизительно на одну треть максимальной ширины лопасти 1046.
Как показано на фиг. 34 и 35, в каркас может вставляться другие типы приспособлений насадки миксера в соответствии со способами, показанными ранее со ссылкой на фиг. 25 и 26-29. На фиг. 34 представлена в основном подковообразная основная часть 1050 приспособления, которая предназначена для взаимодействия с каркасом, как указано со ссылкой на фиг. 26-29. Она может быть использована с использованием магнитного притяжения или без него. В этом примере основная часть приспособления содержит соединенные боковые стороны 1051, каждая из которых содержит по меньшей мере одно сквозное отверстие 1052, 1053. В случае одного сквозного отверстия 1053 это отверстие проходит вдоль большей части длины боковой стороны 1051 основной части приспособления. Отверстие 1053 шире в верхней части 1054, чем в нижней части 1055. К наружной поверхности наиболее удаленного плеча 1056 боковой стороны 1051 присоединен жесткая или гибкая лопасть 1057, как указано выше. В альтернативном варианте боковая сторона основной части насадки может отличаться одним или несколькими сквозными отверстиями 1052, которые отделены друг от друга поперечными перемычками 1053. В примере по фиг. 35 основная часть 1060 приспособления обладает вертикальными концевыми удлинениями, аналогичными удлинениям.
Как показано на фиг. 36 и 37, принципы, представленные на фиг. 25-35, позволяют каркасу 1070 для одиночного приспособления миксера вмещать скребковые лопасти 1071, 1072 с двумя разными ширинами. Это позволяет использовать каркас 1070 для одиночного приспособления в сочетании с двумя разными чашами для перемешивания, которые обладают разным эффективным диаметром 1073, 1074. По отношению к чашам 1073, 1074 для перемешивания каждого размера боковые края каждой лопасти 1075, 1076 расположены в непосредственной близости к внутренним сторонам соответствующей чаши или с линейным контактом, или иным образом контактируя по существу по всей длины лопасти 1071, 1072. В примерах по фиг. 36 и 37, насадка миксера, содержащая каркас 1070 для приспособлений, используется в сопряжении с выходным шпинделем 1077 с планетарным перемешиванием. Планетарный миксер, показанный на фиг. 36 и 37, используется в сочетании со специально предусмотренной чашей с желобом в нижней части чаши 1078, характеризующейся центральной высокой точкой 1079.
Как упомянуто выше, принципы настоящего изобретения относятся главным образом к планетарному типу настольных миксеров. Как показано более конкретно на фиг. 38, планетарный миксер 1080 имеет вращающуюся головку 1081, через которую выступает по меньшей мере один вращающийся выходной вал или шпиндель 1082. Как будет описано далее, настоящая технология предусматривает наличие головки планетарного миксера с одним или несколькими вращающимися выходными шпинделями 1082, 1083.
Как показано на фиг. 39 и 40, помимо первичной насадки 1090 для перемешивания (которая является насадкой для перемешивания, со скребком или венчиком и т.д.), второе приспособление 1091 для соскребывания может быть присоединено к вращающейся планетарной головке 1092. В примерах по фиг. 39 и 40 второе приспособление 1091 удерживается держателем или кольцом 1093, которое зажимает, защелкивает или иным образом прикрепляет ее к вращающейся головке 1092, не мешая действию основного приспособления 1090. В примере по фиг. 39, приспособление содержит вторую лопасть 1094 скребка, который присоединен к кольцу или держателю 1093. Вторая лопасть 1094 предназначена для линейного контакта или тесного контакта с внутренней поверхностью совместно используемой чаши 1095 для перемешивания. Участок второй лопасти приспособления содержит в основном вертикальную и изогнутую основу 1096, к которой присоединена рабочая часть лопасти 1094. Эта основа 1096 предпочтительно присоединена к горизонтальному плечу 1097, которое присоединено или сформировано в виде единого целого с зажимным кольцом 1093. В некоторых вариантах осуществления кольцо 1093 разделено, и примыкающие конечные участки 1098 прикреплены друг к другу крепежной деталью 1099, которая может быть затянута или ослаблена для установки или удаления второго приспособления. Таким образом, основное приспособление 10 будет следовать по круговой траектории вокруг вертикальной центральной линии чаши 1095, имея второе вращательное движение вокруг продольной оси 1097 насадки 1090. Как показано на фиг.40, держатель или кольцо 1091 насадки может обладать двумя или большим количеством лопастей 1100, 1101 приспособления, присоединенных к ней, предпочтительно лопасти расположены с равным промежутком друг от друга. В этом примере второй скребок или скребки 1100, 1101 используются в сочетании с насадкой 1102 в виде венчика, удерживаемой одним из выходных шпинделей миксера.
Как показано на фиг. 41-43, миксер планетарного типа может иметь два отдельно вращающихся выходных шпинделя 1110, 1112. Это позволяет миксеру вращать две разные насадки одновременно (каждая с планетарным движением) или вращать одно приспособление в одном из двух разных положений. Относительно центральной линии 1113 вращения планетарной головки 1114 один выходной шпиндель 1112 расположен радиально снаружи относительно другого выходного шпинделя 1110. Как показано на фиг. 42 и 43, каждый выходной шпиндель 1110, 1112 удерживается своим собственным сателлитом 1113, 1114. Два сателлита 1113, 1114 входят в зацепление и имеют общий привод за счет соединения между одним сателлитом 1114 и неподвижным коронным зубчатым колесом 1115. Как показано на фиг. 42 и 43, основной приводной вал 1116 заканчивается червяком 1117, который взаимодействует с червячным колесом 1118. Червячное колесо 1118 удерживается на вертикальном валу, который также удерживает понижающую зубчатую передачу 1119. Понижающая зубчатая передача 1119 приводит в действие центральное зубчатое колесо 1116, которое удерживается вертикальным валом 1121, к которому присоединена планетарная головка 1122. Цапфа или подшипник 1123 поддерживает вертикальный вал 1121, чтобы планетарная головка 1122 перемещалась одновременно с центральным зубчатым колесом 1120. Вращательное действие планетарной головки 1122, таким образом, приводит в действие оба выходных шпинделя 1110, 1112, вынуждая взаимное зацепление сателлита 1114 с неподвижным коронным зубчатым колесом 1115. Каждый из шпинделей 1110, 1112 поддерживается цапфой или подшипниками 1124, заключенными в головке 1122.
За счет наличия двух вращающихся выходных шпинделей 1110, 1112 устройство имеет две раздельные планетарные траектории для приспособлений, каждая траектория обладает отличающимся максимальным эффективным диаметром. Таким образом, например, могут быть легко вмещены две чаши разного размера.
Глубокая чаша малого диаметра специально разработана для взбивания яичных белков, как показано на фиг. 44. Поскольку обычные чаши для перемешивания для планетарного миксера должны обладать общим максимальным диаметром горлышка 220 мм, максимальный диаметр 1200 горлышка чаши по фиг. 44 составляет 171 мм. Поскольку обычные чаши для перемешивания имеют общую высоту (включая основание) 178 мм, общая высота чаши по фиг. 4 составляет 188 мм, включая высоту основания 1201. Как показано на фиг. 44 и 45, верхний участок профиля чаши приблизительно вертикальный. Нижний участок 1203 сужается, приблизительно по параболе, и самый нижний участок 1204 включает в себя узкий тороидальный желоб 1205 с приподнятым центральным участком 1206А. Самый нижний участок 1204 присоединен к основанию 1201. Как будет пояснено далее, основание 1201 может быть установлено в основании миксера в трех различных ориентациях. В таком случае чаша в примере по фиг. 44 и 45 имеет основание 1201, которое содержит три равноудаленные выемки 1206А и выполнена с одним или несколькими выступами 1207, которые взаимодействуют с охватывающими элементами байонетного соединения в основании миксера.
Как показано на фиг. 46, чтобы улучшить контакт между насадкой 1210 с венчиком и пищевыми ингредиентами, например, яичными белками, которые могут находиться на дне узкой чаши 1211, обычный зазор между самым нижним кончиком венчика 1210 и самой нижней точкой 1213 желоба 1205 минимизирован. В этом примере в собранном состоянии зазор 1214 составляет примерно 4 мм. В этом примере начальная окружность или диаметр, представленные самой нижней точкой 1213 желоба 1205, составляет примерно 51,2 мм. Этот уменьшенный диаметр чаши дает объем приблизительно 3-4 кварты. Стандартная чаша обладает объемом приблизительно 5-6 кварт. Чаша с объемом 3 кварты особенно удобна для взбивания яиц или перемешивания небольших объемов ингредиентов.
Как показано на фиг. 47, настольный миксер 1300 планетарного типа, который предназначен для использования с чашами разного размера 1301, 1302, обладает тем преимуществом, что позволяет распознавать какое приспособление 1303, 1304 присоединено к выходным валам или шпинделям 1305 планетарной головки. Это обусловлено, главным образом, тем, что при попытке использовать приспособление 1303 большего диаметра возникает вероятность наталкивания или создания других затруднений при использовании в комбинации с чашей 1302 малого диаметра, для которой она не предназначена. В этом примере настольный миксер 1300 выполнен с распознаванием типа и, следовательно, размера чаши и последующего сравнения типа обнаруженной чаши с типом распознанного приспособления. Если чаша и приспособление несовместимы, пользователь не сможет привести в действие приводной электродвигатель 1306 миксера. Как указано выше и со ссылкой на фиг. 44, конкретная чаша, например, чаша малого диаметра, обладает одной или несколькими выемками 1206А, сформированными в основании чаши 1201. Наличие или отсутствие выемок 1206А может быть распознано механическим датчиком 1307, расположенным около отверстия 1308, которое принимает основание 1201 чаши. Предпочтительно механический датчик 1307 ориентирован радиально и содержит микровыключатель, который либо разомкнут, либо замкнут в зависимости от того, содержит ли основание чаши выемку 1206А. Для обнаружения отличающихся характеристик основания чаши могут быть использованы и другие типы датчиков 1307. Данные от датчика 1307 передаются на микроконтроллер 1309 миксера. Таким образом, микроконтроллер получает индикацию, какая чаша успешно вставлена пользователем. Микроконтроллер сравнивает эти данные с выходом датчика 1310 насадки. Датчик 1310 насадки расположен в основании 1311 миксера, в пределах границ принимающего отверстия для чаши 1308 и предпочтительно около самой передней точки отверстия 1308. Когда вертикальный или продольный доступ к насадке 1303 находится непосредственно над датчиком 1310, это называется начальной или конечной ориентацией приспособления 1303. В этой ориентации приспособление 1303 может быть введено и вынуто из чаши 1301, при этом приспособление все еще остается присоединенным к выходному валу 1305. В этом примере лопасть 1303 скребка выполнена с магнитом 1312, который расположен на продольной центральной линии насадки 1303 и примыкает к самому нижнему ее участку 1313. Когда магнит 1312 находится над датчиком 1310 (таким как датчик холла или герконовый выключатель), датчик 1310 передает сигнал или импульс на микроконтроллер 1309. Таким образом, сигнал или импульс, генерируемый датчиком 1310, указывает, что приспособление 1303 с магнитом 1312 находится в положении над датчиком 1310. Отсутствие сигнала указывает микроконтроллеру, что либо нет приспособления, либо приспособление не имеет магнита 1312. В этом примере датчик расположен непосредственно под самым нижним участком тороидального желоба, соединенного с чашей 1301, которая вставлена в принимающее отверстие 1308.
Дополнительно на фиг. 47 показано, что миксер 1300 может быть выполнен с возможностью приведения приспособления 1303 в начальную или конечную ориентацию автоматически. Для этого микроконтроллер 1309 должен обладать способностью распознавать поворотную ориентацию планетарной головки 1315. Для этого планетарная головка снабжена магнитом 1316, и основная часть миксера 1300 снабжена датчиком 1317, который может обнаруживать присутствие или близость магнита 1316. Кроме того, на выходном валу 1318 основного электродвигателя 1306 миксера установлено магнитное кольцо 1319. Датчик 1320 холла взаимодействует с магнитным кольцом 1319, передавая сигнал на микроконтроллер 1309, этот сигнал интерпретируется как прямые показания скорости выходного вала 1318. В предпочтительных вариантах выходной вал 1318 осуществляет привод редуктора 1328, который составляет часть механического приводного механизма 1321, который присоединяет электродвигатель 1306 к главному валу 1329.
Взаимодействие между устройством 1319, 1320 распознавания скорости валов электродвигателя 1306 и устройством 1316, 1317 распознавания положения позволяет микроконтроллеру 1309 перевести насадку 1303 в начальную или конечную ориентации автоматически после того, как пользователь отключает питание электродвигателя. Это обычно осуществляется с помощью выключателя, установленного снаружи на пользовательском интерфейсе 1330 миксера. После нажатия кнопки останова на интерфейсе 1330, питание электродвигателя отключается. Однако за счет инерции электродвигателя и приводного механизма, электродвигатель продолжает вращаться. Датчик 1320 холла продолжает предоставлять данные скорости вала электродвигателя на микроконтроллер 1309. микроконтроллер затем ищет сигнал от датчика 1317 положения головки. Он использует сигнал от датчика 1317 положения в качестве указателя исходного положения. Микроконтроллер затем должен выполнять расчеты на основе выходной скорости вала электродвигателя, зарегистрированной датчиком 1320, чтобы оценить, сколько времени или сколько оборотов электродвигателя требуется для приведения планетарной головки 1315 в начальную или конечную ориентацию, то есть, с магнитом 1312 насадки непосредственно над датчиком 1310 насадки. Если скорость электродвигателя недостаточна (после отключения электродвигателя) для достижения магнитом 1316 положения головки датчика 1317 положения, микроконтроллер будет рассчитывать время и соответствующую скорость для работы электродвигателя таким образом, чтобы можно было зарегистрировать начальное положение или положение указателя головки 1315. В этом конкретном примере отношение числа оборотов электродвигателя к числу оборотов планетарной головки 1315 составляет примерно 64 к 1. Магнитное кольцо на валу электродвигателя содержит четыре пары магнитов. Соответственно, один оборот вала электродвигателя дает четыре импульса на датчик 1320. Таким образом, 256 импульсов указывают один полный оборот планетарной головки 1315. Таким образом, имея зарегистрированное положение указателя посредством датчика 1317, микроконтроллер может управлять электродвигателем предсказуемым образом, чтобы приводить приспособление 1303 в начальную или конечную ориентацию. Микроконтроллер может использовать справочную таблицу для корреляции скорости вала электродвигателя со скоростью вращения планетарной головки 1315. Таким образом, электродвигатель по продолжительности и уровню мощности зависит от зарегистрированной скорости вала электродвигателя и результата данных, содержащихся в справочной таблице или сохраненном алгоритме. В некоторых вариантах контроллер 1331 скорости электродвигателя, управляемого микроконтроллером 1309, может подавать на электродвигатель обратную мощность для торможения электродвигателя до требуемого уровня скорости, степень и длительность подачи обратной мощности на электродвигатель контроллером 1331 определяется путем определения микроконтроллером скорости вала, определяемой датчиком 1320. Обеспечение торможения электродвигателя предотвращает дополнительное вращение планетарной головки 1315 после отключения питания электродвигателя. В некоторых вариантах функция совмещения, обеспечиваемая датчиком 1317, который регистрирует положение планетарной головки 1315, может быть заменена датчиком 1310, который регистрирует наличие магнита 1312 на приспособлении 1303. Микроконтроллер использует импульс, подаваемый датчиком 1310 насадки, для функции позиционирования, описанной выше со ссылкой на датчик 1317 положения головки.
Поскольку миксер может располагать приспособления в заранее определенном положении когда пользователь возвращает дисковый регулятор скорости в положение «выключено», можно выровнять приспособление, чтобы его можно было отсоединять от чаши в определенной ориентации.
Некоторые варианты описаны как способ или комбинация приемов способа, который может быть осуществлен процессором вычислительной системы или другим средством выполняющим такую функцию. Таким образом, процессор с необходимыми командами для выполнения такого способа или приемов способа является средством для выполнения способа или его приемов. Кроме того, описанные элементы вариантов выполнения устройства являются примерами средств осуществления функций, позволяющих достичь целей изобретения.
Взаимодействия описанных охватываемых и охватывающих компонентов, например, механических и байонетных соединений, а также шпинделей или валов с взаимодействующими принимающими отверстиями или углублениями могут быть взаимозаменяемыми, если не указано иного.
В альтернативных вариантах один или несколько процессоров функционируют как одно отдельное устройство или могут быть соединены, например, через сеть с другим процессором (процессорами), один или более процессоров могут функционировать в качестве сервера или вычислительной машины клиента в сетевом окружении сервер-клиент, или в качестве вычислительной машины равноправного объекта в одноранговом или распределенном сетевом окружении, беспроводном или ином.
Таким образом, один вариант реализации каждого из описанных выше способов представлен в виде считываемого компьютером физического канала передачи данных, передающего набор команд, например, компьютерную программу, которая предназначена для выполнения в одном или нескольких процессорах.
Если конкретно не указано иного, то использование таких терминов, как «выполнение», «обработка данных», «вычисление», «определение» или подобных, может относиться к действию и/или процессам компьютера или вычислительной системы, или аналогичного электронного вычислительного устройства, которое обрабатывает и/или преобразует данные, представленные в виде физических величин, например, в электронной форме, в другие данные, аналогично представленные в виде физических величин.
Аналогичным образом, термин «процессор» может относиться к любому устройству или части устройства, который обрабатывает электронные данные, например, из регистров и/или памяти для преобразования этих электронных данных в другие электронные данные, которые, например, могут быть сохранены в регистрах и/или памяти. Термин «компьютер» или «вычислительная машина» или «вычислительная платформа» могут иметь один или несколько процессоров.
Описанные приемы могут выполняться одним или несколькими процессорами, которые принимают считываемый компьютером (также называемый машиночитаемым) код, содержащий набор команд, который при исполнении одним или более процессорами осуществляет по меньшей мере один из описанных в настоящем документе способов. Подразумевается любой процессор, способный исполнять набор команд (последовательных или иных), который указывает действия, которые необходимо предпринять.
Если в контексте явно не требуется иного, во всем описании и формуле изобретения слова «содержать», «содержащий» и подобные следует истолковывать во включающем смысле, противоположном исключающему или всеобъемлющему смыслу; то есть, в смысле «включая, но, не ограничиваясь этим».
Аналогично, следует отметить, что термин «связанный», когда он используется в формуле изобретения, не следует интерпретировать, как ограничивающийся только непосредственными соединениями. Может быть использован термин «связанный» и «соединенный», вместе с их производными. Следует понимать, что эти термины не подразумеваются, как синонимы. Таким образом, объем выражения «устройство А связано с устройством В» не следует ограничивать устройствами или системами, в которых выход устройства А непосредственно присоединен к входу устройства В. Это означает, что существует путь между выходом А и входом В, который может быть путем, включающим другие устройства или средства. «Связанный» может означать, что два или более элементов находятся либо в прямом физическом или электрическом контакте, либо, что два или более элементов не находятся в непосредственном контакте друг с другом, но все же взаимодействуют или воздействуют друг на друга.
Если иного не указано, то используемые для порядковых прилагательных «первый», «второй», «третий» и т.д., описывающие общий объект, просто указывают, что должны быть упомянуты разные примеры аналогичных объектов, и не подразумевают, что эти объекты, описанные таким образом, должны быть в заданной последовательности, либо по времени, либо в пространстве, по расположению или любым другим образом.
Ссылка по всему описанию на «один вариант осуществления» или «вариант осуществления» означает, что конкретная особенность, структура или характеристика, описанная в связи с этим вариантом осуществления, включена по меньшей мере в один вариант осуществления. Таким образом, появление фраз «в одном варианте осуществления» или «в варианте осуществления» в разных местах по всему этому описанию необязательно относится к одному и тому же варианту осуществления, но может относиться к одному и тому же варианту осуществления. Кроме того, конкретные особенности, структуры или характеристики могут быть объединены любым подходящим способом, что очевидно для специалиста в этой области по этому описанию, в одном или нескольких вариантах осуществления.
Аналогично этому, следует понимать, что в приведенном выше описании примеров вариантов осуществления настоящего изобретения различные особенности настоящего изобретения иногда группируются вместе в одном варианте осуществления, чертеже или его описании для цели упрощения раскрытия и помощи в понимании одного или более различных аспектов изобретения. Этот способ раскрытия, однако, не следует интерпретировать, как отражающий мысль, что заявленное изобретение требует большего числа особенностей, чем явно упомянуто в каждом пункте формулы. Скорее, что и отражает следующая формула изобретения, аспекты изобретения заключены в менее чем всех особенностях одного упомянутого выше раскрытого варианта осуществления. Таким образом, формула изобретения после подробного описания тем самым явно включена в подробное описание, с каждым пунктом формулы, зависящим от его собственного отдельного варианта осуществления настоящего изобретения.
Кроме того, хотя некоторые варианты осуществления, описанные в настоящем документе, включают некоторые, но не другие особенности, включенные в другие варианты осуществления, подразумевается, что комбинации особенностей разных вариантов осуществления охватываются объемом настоящего изобретения и формируют другие варианты осуществления, что должно быть понятно специалистам в этой области. Например, в формуле изобретения любой из заявленных вариантов осуществления может быть использован в любой комбинации.
В описании изложены многочисленные конкретные детали. Однако понятно, что варианты осуществления настоящего изобретения могут быть осуществлены без этих конкретных деталей. В других объектах, хорошо известные способы, структуры и оборудование не показаны в деталях, чтобы не затруднять понимания этого описания.
Хотя настоящее изобретение описано со ссылкой на конкретные примеры, для специалистов в этой области будет очевидно, что настоящее изобретение может быть осуществлено во многих других формах.
Очевидно, что один вариант осуществления настоящего изобретения может состоять по существу из описанных в настоящем документе особенностей. В альтернативном случае вариант осуществления настоящего изобретения может состоять из описанных в настоящем документе особенностей. Изобретение, иллюстративно раскрытое в настоящем документе, соответствующим образом может быть осуществлено в отсутствие любого элемента, который не раскрыт конкретным образом в настоящем документе.
Реферат
Настольный миксер с комбинированной насадкой имеет венчик и скребок. Предпочтительно миксер содержит обрабатывающий элемент, выполненный с возможностью доступа к данным, указывающим интервал значений подводимой к электродвигателю мощности для каждой из множества скоростей, доступных для выбора пользователем, отслеживания скорости электродвигателя и сравнения этой скорости с выбранной пользователем скоростью. Обрабатывающий элемент увеличивает подаваемую на электродвигатель мощность до соответствующего интервала значений, если текущая скорость меньше выбранной пользователем. 11 з.п. ф-лы, 47 ил.
Комментарии