Датчик с шестью степенями свободы - SU1082337A3
Код документа: SU1082337A3
Чертежи



Описание
1 Изобретение относится к силоизмерительной технике, в частности к датчику с шестью степенями свободы предназначенному для преобразования усилий и моментов прикладываемых к подвижной детали, а именно к подвижной , руке робота, в электрические сигналы. Известны датчики с шестью степенями свободы, содержащие взаимосвязанные между собой модули, каждый из которых представляет собой брус с тонкой перемычкой. Блочный принци построения позволяет собирать из модулей датчики для измерения усили с желаемым числом степеней свободы lj. Однако эти датчики обладают недостаточной надежностью ввиду их сложности. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для измерения сил и моментов, передаваемых захватами манипулятора, содержащее фотоэлектрические чувствительные датчики, обеспечивающие измерение сил и моментов по шести степеням свободы 2J . Однако известное устройство ввиду сложности конструкции и большой чувствительности к изменениям условий окружающей среды обладает невысокой надежностью. Целью изобретения является повышение надежности.
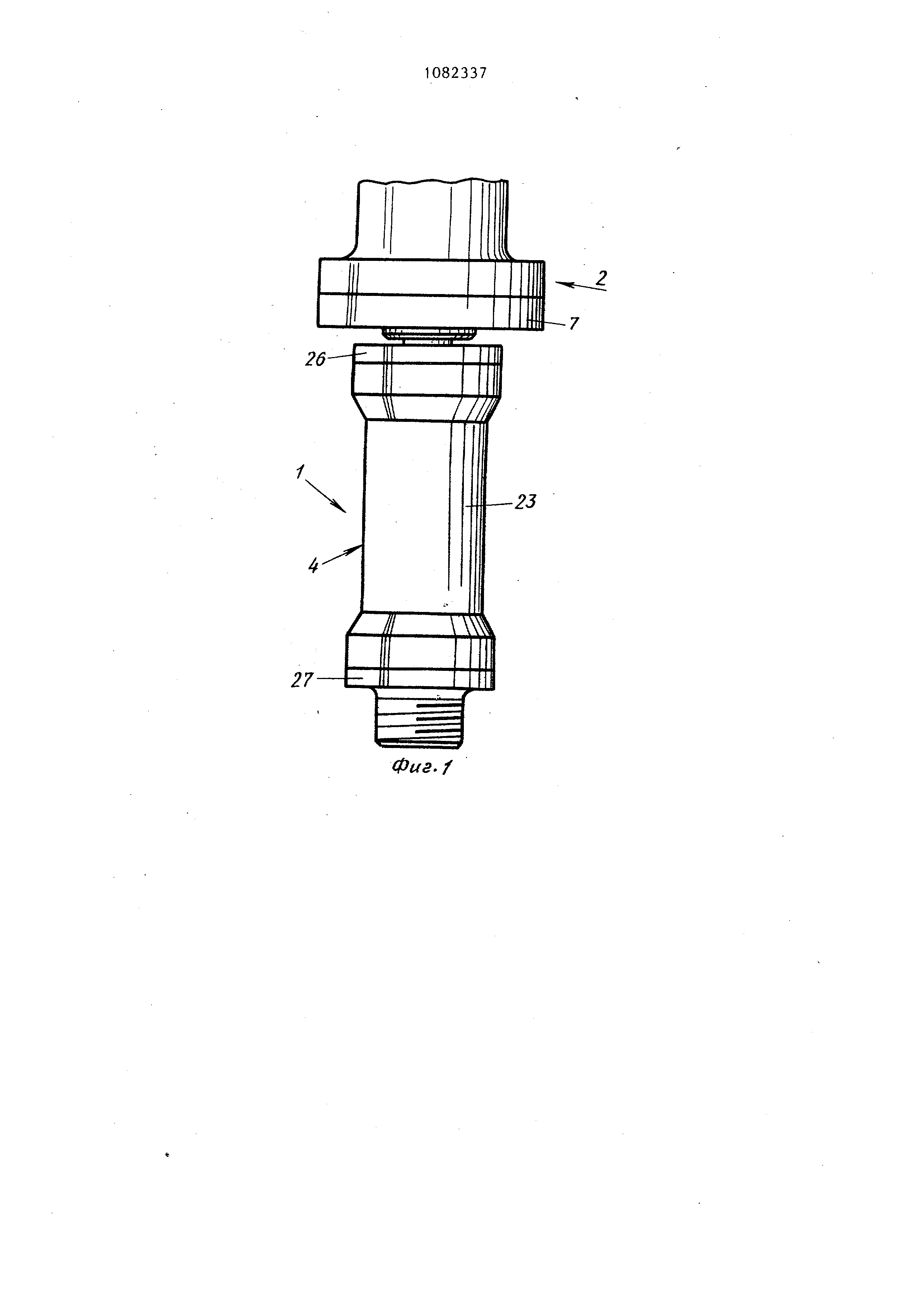
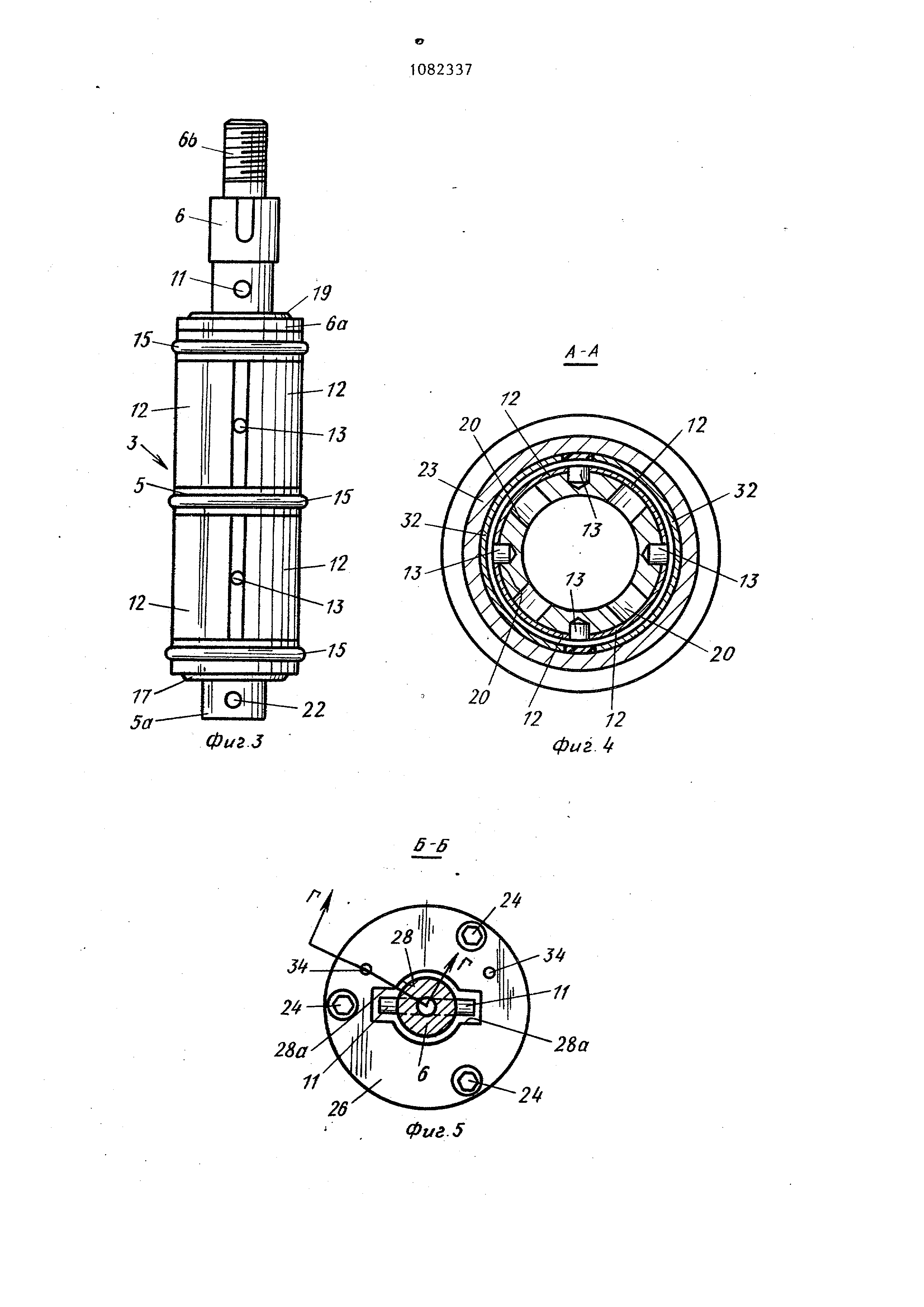
Указанная цель достигается тем, что в датчике с шестью степенями свободы для преобразования сил и моментов в электрические сигналы, прикладываемых к подвижному элементу , содержащем корпусj силовводящий элемент, преобразователи переме щения в электрические сигналы и узел регистрации, преобразователи перемещения в электрический сигнал размещены в жестком цилиндрическом кожухе и вьтолнены в виде восьми конденсаторов, неподвижные обкладки которых вьтолнены в виде двух металлических полуцилиндрических пластин , расположенных под равными угла ми и закрепленных внутри кожуха, а подвижные обкладки выполнены в виде двух групп разнесенных по одному диаметру на равных расстояниях одна от другой вдоль общей оси по четьфе в каждой группе металНа фиг.1 изображен датчик, вид в перспективе5 на фиг.2 - то же, продольное сечение, на фиг.З - цилиндрический корпус датчика вид в перспективеJ на фиг.4 - сечение А-А на фиг.2; на фиг.З - сечение Б-Б на фиг.2; на фиг.6 - сечение В-В на фиг.2 на фиг,7 - сечение Г-Г на фиг.5, на фиг.8 - электрическая схема датчика.
Датчик 1 имеет шесть степеней свободы и подсоединяется к одному концу подвижной детали 2, представляющей , например, подвижную руку робота. Датчик содержит жесткий корпус 3 цилиндрической формы, располагаемый внутри жесткого кожуха А, имеющего цилиндрическую внутреннюю поверхность. Корпус 3 содержит полый цилиндрический элемент 5, внутренняя поверхность которого имеет нарезку на конце, обращенном к руке 2 робота 7 лических пластин, расположенных диаметрально противоположно парами и закрепленных на цилиндрическом корпусе, жестко связанном с силовводящим элементом и расЬоложенном внутри кожуха, установленного на корпусе с помощью упругих прокладок , выполненных в виде тороидальных колец из эластомерного материгша , размещенных в кольцевых канавках, расположенных на торцовых и боковой поверхностях корпуса , на торцах корпуса выполнен по меньшей мере один радиальный выступ , размещенный в канавке кожуха с возможностью, ограничения угловых перемещений кожуха относительно корпуса, а на торцах кожуха установлены кольцевые ограничительные прокладки, обращенные к соответствующей торцовой поверхности корпуса и взаимодействующие с упругими прокладками с возможностью ограничения осевых перемещений кожуха относительно корпуса, а узел регистрации выполнен в виде управляемого генератора, к которому подключены восемь преобразователей напряжения в частоту, каждый из которых подсоединен к соответствующему конденсатору , и средств обработки сигналов преобразователей напряжения. Кроме того, торец кожуха, противоположный силовводящему элементу, снабжен средством для соединения с рабочим инструментом.
Нижняя часть боковой поверхности цилиндрического соединительного элемента 6, предназначенного для подсо динения корпуса 3 к концу руки 2 робота, имеет резьбу и входит в зацепление с соответствующей резьбово частью полого цилиндрического элемента 5.
Соединительный элемент 6 для подсоединения корпуса 3 к концу руки 2 робота имеет цилиндрическую форму и нижняя часть его боковой поверхности имеет резьбу и входит в зацепление с соответствующей резьбовой частью полого цилиндрического элемента 5. Соединительный элемент 6 снабжен кольцевым фланцем 6а, который служит в качестве торцового ограничителя для верхнего края полого цилиндрического элемента 5.
Кольцевой элемент 7 закреплен на конце подвижной руки 2 при помоощ болтов 8 и снабжен осевой цилиндрической камерой, содержащей первую и вторую соосные цилиндрические части 9а и 9Ь через которые проходит соединительный элемент 6. Торцовая часть 6Ъ элемента 6 частично имеет резьбу для сочленения с гайкой 10, которая служит для подсоединения элемента 6 к кольцевому элементу 7.
Соединительный элемент 6 снабжен осевым отверстием 6с и парой, расположенных друг против друга, радиальных отверстий 6 d которые служат в качестве посадочных мест для двух поперечных пальцев 11, концы которых выступают в радиальном направ лении наружу из отверстий 6d.
Боковая поверхность полого цилиндрического элемента 5 содержит первую и вторую осевые части, каждая из которых снабжена четырьмя располагаемыми под равными углами металлическими пластинами 12, размешаемыми диаметрально противоположно и парах (фиг.З и 4) . Между двумя соседними металлическими пласти|нами 12 предусмотрен палец 13,удерживаемый полым цилиндрическим элементом 5 для облегчения установки мталлических пластин 12 на боковой поверхности полого цилиндрического элемента 5 во время сборки.
Пальцы 13 могут быть металлическими , в этом случае их боковые поверхности покрываются тонким слое
электроизоляционного материала,получаемого , например, при помощи оксидирования.
Поверхность полого цилиндрического корпуса 5 снабжена тремя кольцевыми канавками 14, в которых расположены соответствующие тороидальные кольца 15 ИЗ эластомерного материала, которые взаимодействуют с внутренней поверхностью кожуха 4 и служат в качестве упругих распорных элементов. Полый цилиндрический элемент 5 также имеет кольцевую канавку 16 в нижней торцовой поверхности, в которой размещено тороидальное кольцо 17 изэластомерного материала. поверхность кольцевого фланца 6а соединительного элемента 6 также снабжена кольцевой канавкой 18, в которой размещено тороидальное кольцо 19 из эластомерного материала.
Стенка полого цилиндрического элемента 5 снабжена в соответствии с каждой из металлических пластин 12 отверстием 20, через которое проходит соответствующий электрический проводник 21, один конец которого припаивается к соответствующей металлической пластине 12. Проводники 21 проходят через отверстия 6с соединительного элемента 6 и отверстие 2а на торце подвижного рычага 2. Полый цилиндрический корпус 5 имеет цилиндрический торцовый выступ 5а снабженный диаметральным отверстием 5Ь в котором расположен палец 22, концы которого выступают в радиальном направлении наружу из выступа 5а.
Полый цилиндрический элемент 5 может быть изготовлен из электроизоляционного материала, имеющего значительную механическую прочность Кожух 4 содержит цилиндрическую втулку 23, к концам которой подсоединены при помощи болтов 24 и 25 соответствующие закрывающие элементы 26 и 27 (фиг.2). Закрывающий элемент 26 имеет круглое цилиндрическое отверстие 28 (фиг.З), через которое проходит соединительный элемент 6. По сторонам отверстия 28 вьшолнены две диаметрально противоположные канавки 28 о в которые выступают концы пальцев 11, установленных на соединительном элементе.6
Кольцевая ограничительная прокладка 29 расположена вокруг соединительного элемента 6 над фланцем бй. Нижняя поверхность прокладки 2 взаимодействует с тороидальным кольцом 19, служащим в качестве упругого распорного элемента. Кольцевая ограничительная прокладка 30 расположена вокруг нижнего выступа За полого цилиндрического корпуса 5 и опирается на закрывающий .элемент 27. Верхняя поверхность прокладки 30 взаимодействует с торовдальным кольцом 17, располагаемым на нижнем конце полого цилиндрического корпуса 5 и служащим в качестве упругого распорного элемента.
Нижний закрывающий элемент 27 снабжен осевой цилиндрической камерой 31 (фиг.6), состоящей из двух частей. Цилиндрический выступ 50 палого цилиндрического элемента 5 проходит в первую часть камеры 31. Стенка этой первой части камеры 31 сделана с двумя диаметрально противоположными канавками 3101, в которые выступают концы пальца 22, установленного на нижнем конце полого цилиндрического корпуса 5. Вторая цилиндрическая часть 31Ь (фиг.2) и боковая поверхность закрывающего элемента 27 выполнены с резьбой .
Внутренняя поверхность втулки 23 снабжена двумя полуцилиндрическими металлическими пластинами 32, расположенными под равными углами по отношению друг к другу и напротив пластин 12, удерживаемых на полом цилиндрическом корпусе 5 таким образом , что между ними образовьшается узкое пространство и получается восемь конденсаторов, емкость которых зависит от положения пластин 32 кожуха 4 по отношению к пластинам 12 корпуса 3. Втулка 23 может быть изготовлена иэ электроизоляционного материала, обладакмцего большой механичёской прочностью. Для экранирования внешняя поверхность втулки может быть покрыта проводящим материном.
Электрический проводник 33 (фиг.7) подсоединен с каждой из пластин 32. Каждый проводник 33 выходит из кожуха 4 через соответствующее отверстие 34 (фиг.5 и 7) закрывающего элемента 26 кожуха 4. Кожух 4, образованный втулкой 23 и закрывающими элементами 26 и 27, упруго подвешен на корпусе 3 (образованном
полым цилиндрическим корпусом 5 и соединительным элементом 6) при помощи тороидальных колец 15, 17 и 19 Кож5пс 4 может осуществлять ограниченные перемещения с шестью степенями свободы по отношению к корпусу 3.
Прокладки 29 и 30 соответственно взаимодействуют с тороидальными кольцами 19 и 17 для ограничения осевых перемещений кожуха 4 по отнощению к корпусу 3. Концы пальцев 11 и 22, которые входят с зазором в канавки 28 и 31 С| соответственно ограничивают угловые перемещения кожуха 4 по отношению к корпусу 3.
Действие сил или моментов, прикладываемых во время работы к подвижному рычагу 2 при помощи датчика 1, преобразуется в изменения емкости восьми конденсаторов.
Узел регистрации (фиг.8) подсоединен к пластинам 12 корпус,а 3 и к пластинам 32 кожуха 4 для измерения во время работы величин емкости каждого из конденсаторов и для обеспечения на основе такого замера электрических сигналов, показывающих силы и моменты, прикладываемые к подвижной детали, представляющей подвижную руку 2 робота. Пластины 12а, 12%, 120, 12d, l2e, 12f, 12 и ,12h установлены на корпусе 3, а пластины 32 а и 32Ь установлены на кожухе 4.
На фиг.8 введена система ортогональных декартовых координат OXYZ, ось Z которой совпадает с осью концентрических цилиндрических поверхностей , часть которых образуют пластины 12 и 32, ось X направлена перпендикулярно к двум соответствующим парам противоположных пластин и проходит через центр этих пластин а ось Y направлена перпендикулярно к оси Z и к оси X. Пластины 32oi и 32b обе заземляются.
Восемь преобразователей 35-42 напряжения в частоту управляются от одного общего генератора 43.
Каждый из преобразователей 35-42 напряжения в частоту подсоединен к конденсатору, образованному одной из пластин 12 и обращенной к ней S соответствующей пластиной 32. Преобразователи 35-42 обеспечивают на выходе сигнал напряжения, амплитуда которого пропорциональна емкости
7
соответствующего конденсатора, к ко торому они соответственно подключаются . Вькодные напряжения преобразователей 35-42 обозначены соотве ственно V , Vj ,. , . ,Vg .
Предположим, что к кожуху 4 приложена сила, направленная в отрицательном направлении вдоль оси X (фиг.8). Эта сила вызывает перемещение кожуха 4 по отношению к внутреннему корпусу 3 таким образом, что расстояние между пластинами 12а, 12 и 32а уменьшается, в то время как расстояние между пластинами 12b 2d и 32 а увеличивается. Соответственно емкость конденсаторов, образованных пластинами 12Ь, 12; и 32 а увеличивается, в то время как емкость конденсаторов, образованных пластинами 12а, 12с и 32b уменьшается . Следовательно, напряжения V;j и Vg создаваемые на выходах преобразователей 35 и 39 соответственно , увеличиваются, а напряжения Vx И Vg, создаваемые соответственно на выходах преобразователей 38 и 42, уменьшаются. Поэтому ясно, что величина
() (Vg-Vg)
показывает относительное перемещение кожуха 4 по отношению к внутреннему корпусу 3 вследствие приложения силы, действующей вдоль оси X. Аналогично можно определить, что величина
() + ()
показывает величину перемещения кожуха 4 по отношению к внутреннему корпусу 3 под действием силы, действующей вдоль оси Y. Кроме того, величины
(Vj-V,) - () () - (Vj-Vg)
показывают величину относительного поворота кожуха 4 по отношению к внутреннему корпусу 3 под действием моментов, действующих соответственно вокруг оси X и вокруг оси Y,
Если к кожуху 4 приложена некоторая сила, параллельная оси Z, например в положительном направлении этой оси, то ее действие приводит к осевому перемещению пластины 32
0823378
по отношению к восьми пластинам 12, Вследствие этого перемещения емкости четырех конденсаторов, образованных пластинами 12а, 12Ь, 12е, 5 12f, и частями обращенных к ним пластин 32о и 32Ь, увеличиваются вследствие увеличения перекрывающихся поверхностей. Наоборот, емкость конденсаторов, образованных пласти10 нами 12с, 12(3, , 12h и обращенными к ним частями пластин 32о( и 32Ь уменьшается вследствие уменьшения перекрывающейся области поверхности этих пластин.
15 С другой стороны, если сила,
действующая на кожух 4, направлена параллельно оси Z, но в отрицательном направлении, то емкости конденсаторов , содержащих пластины 12с,
20 12cj, 12h, увеличиваются, а емкости конденсаторов, содержащих пластины 12q, 12Ь, 12{ и 12 уменьшаются .
Когда направление силы, дейст25 вующей на кожух 4, параллельно оси Z, величина (например)
() + ()
показывает величину и направление относительного перемещения между ко . жухом 4 и внутренним корпусом 3 вдоль
оси Z вследствие приложения силы, действующей на кожух 4 параллельно
оси Z, и таким образом, эта величина 5 также показывает величину и направление этой силы.
Очевидно, что, с целью выяснения отношения между изменением емкости . восьми конденсаторов и величиной О и направлением силы, действующей . параллельно оси Z, необходимо,чтобы окружности, соответственно ограничиваемые верхними кромками пластин 12а, 12Ъ, 12е, 12i и нижними кром5 ками пластин 12с, 12с, 12, 12h
лежали в соответствующих плоскостях, . которые не пересекают пластицы 32а и 32Ъ.
Если момент, действующий вокруг 0 оси Z, например, в направлении против часовой стрелки, приложен к кожуху , то вследствие действия этого момента емкость конденсаторов,содержа цих пластины 12е, 12f, 12 и 5 12h уменьшается в результате уменьшения площадей частей пластин 32ci и 32Ь которые перекрывают эти пластины. Наоборот, емкости конден-
саторов, содержащих пластины |2а, 12§, 12с и 12г увеличиваются вследствие увеличения площадей их перекрытия с пластинами 32а и 32Ъ
В случае момента, действующего на кожух 4 вокруг оси Z в направлении по часовой стрелке, увеличения и уменьшения емкостей конденсаторов обратны по отношению к случаю, описанному для момента,действующего против часовой стрелки.
В каждом из этих случаев величина
() + (Vi,-V)
показывает величину и направление относительного вращения между кожухом 4 и внутренним корпусом 3 вследствие приложения к кожуху 4 момента , действующего вокруг оси Z, и поэтому эта величина дает информацию как о величине, так и о направлении этого момента.
Действительно, чтобы однозначно представить отношение, между мгновенными значениями емкостей конденсаторов и величиной и направлением сил, действующий на кожух 4, необходимо, чтобы каждая из пластин 12, установленных на внутреннем корпусе 3, ни в коем случае не перекрывалась одновременно обеими пла тинами 32, установленными на кожухе 4. Такая ситуация предотвращается именно наличием пальцев 11 и 22 (фиг.5 и 6). Вследствие того, что эти пальцы могут вращаться с ограниченным люфтом в соответствующих канавках 28а и 31 а они ограничивают угловые перемещения кожуха 4 по отношению к внутреннему корпусу 3.
На фиг.8 показаны средства 44 обработки сигналов, генерируемых преобразователями 35-42, и показывающих составляющие сил и моментов вдоль осей X, Y и Z, прикладываемых к кожуху 4 и, следовательно, передаваемых к руке 2 при помощи внутреннего корпуса 3.
Средства обработки сигналов преобразователей напряжения 44 со8233710
держат, например, дифференциальные усилители 45-54 и четьфе аналоговые суммирующие схемы 55-58. Соединения меж,цу входами дифференциальных уси5 лителей 45-52 и выходами преобразователей 35-42, так же как соединения между этими дифференциальными усилителями и суммирующими схемами 55-58 образуют схему, эквивалентную шести
О приведенным отношениям между напряжениями , обеспечиваемыми на выходах преобразователей 35-42, и составляющими ВДОЛЬ осей X, Y, Z сил и номентов , прикладываемых к кожуху 4
15 и передаваемых к подвижной руке 2 при помощи внутреннего корпуса 3,
В частности, на выходных зажимах суммирующих.схем 55, 56 и 57 существуют при работе соответствующие сиг20 .налы напряжения, показывающие составляющие вдоль осей X, Y, Z соотвётственно сил, прикладываемых к кожуху 4.
На выходных зажимах дифферен25 циальных усилителей 53, 54 и суммирующей схемы 58 существуют при работе соответствующие сигналы напряжения , показывающие составляющие вдоль осей X, У, Z соответственно
30 моментов, прикладываемых к кожуху 4,
Предлагаемое устройство может представлять рукоятку для ручного управления подвижной рукой 2 робота в период обучения. В этом случае
, сигналы, обеспечиваемые на выходе средств обработки сигналов 44, могут использоваться центральным процессором робота для минимизирования сил и моментов, прикладываемьк к
40 рукоятке для того, чтобы рука робота проходила в пространстве определенный путь, по которому она будет перемещаться впоследствии при работе самого робота.
К нижнему концу кожуха 4 предлагаемого устройства может подсоединяться рабочий инструмент, и в этом случае устройство работает как чувствительное запястье, способное определять напряжения,которым подвергается рабочий инструмент во время работы.
. , .r™



Реферат
1. ДАТЧИК С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ для преобразования сил и моментов в электрические сигналы , прикладываемых к подвижному элементу, содержащий корпус, силовводящий элемент, преобразователи перемещения в электрические сигналы и узел регистрации, отличающийся тем, что, с целью повышения надежности, преобразователи перемещения в электрический сигнал размещены в жестком цилиндри ческом кожзгхе и выполнены в виде восьми конденсаторов, неподвижные обкладки которых выполнены в виде двух металлических полуцилиндрических пластин, расположенных под равными угламиИ закрепленных внутри кожуха, а подвижные обкладки выполнены в виде двух групп разнесенных по одному диаметру на равных расстояниях одна от другой вдоль общей оси по четьфе в каждой группе металлических пластин, расположенных диаметрально противоположно парами и закрепленных на цилиндрическом корпусе, жестко связанном с силовводящим элементом и расположенном внутри кожуха, установленного на корпусе с помощью упругих прокладок, выполненных в виде тороидальных колец из эластомерного материала, размещенных в кольцевых канавках, расположенных на торцовых и боковой поверхностях корпуса, на торцах корпуса выполнен по меньщей мере один радиальный а выступ, размещенный в канавке кожуха с возможностью ограничения угло (Л вых перемещений кожуха относительно корпуса, а на торцах кожуха уста- ноБлены кольцевые ограничительные прокладки, обращенные к соответствующей торцовой поверхности корпуса и взаимодействующие с упругими проо эо кладками с возможностью ограничения осевьк перемещений кожуха относитель э :л со но корпуса, а узел регистрации выполнен в виде управляемого генератора, к которому подключены восемь преобразователей напряжения в частоту, каждый из которых подсоединен к соответствующему конденсатору, и средств обработки сигналов преобразователей напряжения. 2. Датчик ПОП.1, отличающийся тем, что торец кожуха, противоположный силовводящему элемен ту, снабжен средством для соединения с рабочим инструментом.
Комментарии