Способ для управления воздушным устройством и воздушное устройство с контроллером, осуществляющим этот способ - RU2695006C2
Код документа: RU2695006C2
Чертежи





Описание
Настоящее изобретение относится к способу, управляющему воздушным устройством, и к воздушному устройству, содержащему контроллер, осуществляющий этот способ управления.
Воздушное устройство этого типа является, например, поворотной лестницей с изгибаемым шарнирным манипулятором, который прикреплен к верхнему концу телескопической стрелы. Однако изобретение не ограничено противопожарными лестницами как таковыми, но также включает в себя аналогичные системы, такие как шарнирные или телескопические платформы и воздушное спасательное оборудование. Эти системы, в общем, монтируются на транспортном средстве, так что они способны вращаться и разворачиваться.
Например, согласно документу DE 94 16 367 U1, шарнирный манипулятор прикрепляется к верхнему концу самого верхнего элемента телескопической стрелы и выступает из полностью сложенной телескопической стрелы, так что он может поворачиваться в любое время независимо от текущей длины раскладывания телескопической стрелы. Другой пример лестницы с шарнирным манипулятором, который может быть телескопическим сам по себе, раскрыт в EP 1 726 773 B1. В еще другом альтернативном варианте осуществления, шарнирный манипулятор включен в самый верхний элемент телескопической стрелы, так что он может полностью складываться в телескопическую стрелу, но поворачиваться, начиная с некоторой длины раскладывания, как раскрыто в EP 2 182 164 B1.
Более того, устройства управления для поворотных лестниц, поднимаемых платформ и подобного раскрыты в EP 1138868 B1 и EP1138867 B1. Общая проблема, которая описывается в этих документах, состоит в демпфировании колебаний во время перемещения лестницы. Эта проблема становится даже более важной с увеличением длины лестницы. Поэтому было предложено прикреплять датчики для обнаружения присутствующего колебательного движения в разных положениях вдоль телескопической стрелы. Для этой цели, используются тензометрические датчики, также называемые SG датчики в последующем (где SG используется в качестве аббревиатуры для "тензометрический"), и дополнительный двух- или трехосный гироскоп, прикрепленный внутри верхней части телескопической стрелы для измерения угловой скорости верхнего конца лестницы напрямую, предпочтительно близко к точке вращения шарнирного манипулятора или к концевой части лестницы. Обеспечивается контроллер для управления перемещением воздушного устройства на основе значений сигналов, которые получаются от SG датчиков и гироскопа. Во время работы, и особенно, когда входящая команда на перемещение воздушного устройства передается в контроллер, текущее состояние колебания учитывается посредством обработки значений сигналов, так что перемещение лестницы может корректироваться, так что концевая часть лестницы достигает и поддерживает целевое положение несмотря на эластичную гибкость стрелы.
Существующие способы для активного демпфирования колебаний стрелы поворотных лестниц или аналогичного устройства не являются подходящими для и не применимы для относительно больших шарнирных лестниц, то есть, лестниц с шарнирным манипулятором и максимальной достижимой высотой, в частности, больше, чем 32 м. Для этих лестниц, вследствие длины их стрелы по отношению к их поперечному сечению, должно учитываться пространственное распределение материала, так что модели с сосредоточенными параметрами на основе приближений сосредоточенной массы не являются подходящими, чтобы адекватно описывать эластичные колебания таких лестниц. Также, не только фундаментальное колебание, но также вторая гармоника (и возможно более высокие гармоники) должны активно демпфироваться, и должны учитываться влияния шарнирного манипулятора и, в частности, изменений угла поворота. Также, за исключением лестниц вплоть до 32 м, не может предполагаться, что эластичное изгибание в горизонтальном направлении и кручение являются независимыми друг от друга. Вместо этого, все моды колебания, ассоциированные с вращениями поворотных платформ, состоят из связанных отклонений изгибания и кручения, как будет описано подробно ниже.
Способы для активного демпфирования колебаний и отслеживания траекторий, которые учитывают фундаментальные изгибающие колебания для каждой оси подъема и вращения известны только из EP 1138868 B1 и EP1138867 B1, которые уже были процитированы выше. Они применимы только к лестницам без шарнирного манипулятора и с максимальной высотой вплоть до 32 м, для которых для каждой оси должно учитываться только фундаментальное колебание. Усовершенствованный способ для шарнирных лестниц известен из EP 1 772 588 B1, где гибкие колебания шарнирной лестницы приближаются с использованием модели с сосредоточенными параметрами. Модель состоит из трех точечных масс, которые соединены друг с другом посредством пружинных демпфирующих элементов. Модель, и, таким образом, также впоследствии разработанное управление демпфированием колебаний, терпят неудачу в том, чтобы учитывать пространственно распределенную природу стрелы, так что связь горизонтального изгибания и кручения не включается в конструкцию. Также, более высокие гармоники не демпфируются активно, но скорее учитываются как возмущения, которые фильтруются с использованием наблюдателя возмущений. Способ использует тензометрические (SG) датчики на нижнем конце стрелы или измерения гидравлического давления исполнительных механизмов, чтобы обнаруживать колебания. Для более больших шарнирных лестниц, эти измерения не являются достаточно чувствительными, чтобы измерять вторую гармонику с адекватным отношением сигнала к шуму при всех длинах лестниц и положениях шарнирного манипулятора, что является особенно необходимым для лестниц, рассматриваемых в настоящей патентной заявке.
Активное демпфирование колебаний, которое учитывает пространственную протяженность стрелы, известно из EP 2 022 749 B1. Изгибание стрелы моделируется с использованием теории изгиба балок Эйлера - Бернулли с постоянными параметрами, и спасательная кабина на концевой части стрелы моделируется как твердое тело, которое задает специальные динамические граничные условия для балки. На основе модального приближения бесконечномерной модели, первое и второе гармоническое колебание восстанавливаются из измерений SG датчиков на нижнем конце и измерений инерции на верхнем конце стрелы, например, гироскопа, который измеряет скорости вращения той же оси вращения. Моды колебания затем получаются из решения алгебраической системы уравнений и обе активно демпфируются. Во втором подходе, предложен наблюдатель возмущений на основе модифицированной модели для движения изгибания первой и второй гармоник, для которой предполагается, что SG датчики измеряют только фундаментальное колебание. С использованием сигналов наблюдателя, активно демпфируется только фундаментальное колебание. Способ не включает в себя ни шарнирный манипулятор и также ни связь изгибания и кручения в горизонтальном направлении. Также, наблюдатель не учитывает разные амплитуды сигналов SG датчиков и гироскопа.
Поэтому является целью настоящего изобретения обеспечить способ для управления воздушным устройством вышеописанного типа, который обеспечивает эффективное демпфирование колебаний воздушного устройства посредством учета связи изгибания и кручения в горизонтальном направлении, и который с незначительными изменениями может аналогично применяться для демпфирования колебаний в вертикальном направлении, возможно включающих в себя влияния шарнирного манипулятора и кабины, прикрепленной к концу шарнирного манипулятора, для обеих осей.
Эта цель достигается посредством способа, содержащего признаки по пункту 1 формулы.
В способе согласно настоящему изобретению, сигналы от SG датчиков и гироскопа получаются как первичные сигналы. В последующем, из этих первичных сигналов вычисляются опорные сигналы. Эти опорные сигналы содержат SG опорный сигнал, относящийся к SG датчикам, и опорный сигнал гироскопа. SG опорный сигнал представляет сигнал, который соответствует угловому положению эластичного отклонения, и опорный сигнал гироскопа представляет значение угловой скорости, каждое для соответствующих пространственных осей. Дополнительный опорный сигнал углового ускорения выводится из значений измерения углового положения или угловой скорости.
Из этих опорных сигналов и дополнительных параметров модели, которые относятся к деталям конструкции воздушного устройства, требуемое количество мод колебания восстанавливаются и используются для вычисления значения угловой скорости компенсации. В предпочтительном варианте осуществления, восстанавливаются первая мода колебания и вторая мода колебания. Вычисленное значение угловой скорости компенсации накладывается на значение угловой скорости прямой связи, чтобы давать результатом сигнал управления приводом, который может использоваться, например, для управления гидравлическим приводом.
В динамической модели, лежащей в основе этого способа, фундаментальное колебание лестницы может отделяться от обертона. Дополнительно, угловое ускорение каждой оси может вычисляться на основе измерений углового положения, и обеспечивается в динамическую модель лестницы, чтобы предсказывать колебания, вызванные перемещениями каждой оси. Оцененные сигналы колебаний используются, чтобы вычислять соответствующий сигнал управления, чтобы демпфировать эти колебания. Этот сигнал управления накладывается на требуемую команду перемещения, представленную посредством значения угловой скорости прямой связи, которое определяется на основе опорных сигналов, считываемых из рычагов управления, которые управляются оператором-человеком, или получается в виде команды от средства управления отслеживанием пути. Вычисление требуемой команды перемещения на основе опорных сигналов спроектировано так, чтобы обеспечивать гладкую реакцию и уменьшать возбуждение колебаний лестницы. Результирующий сигнал управления приводом передается в исполнительные механизмы, используемые, чтобы управлять средством привода, ассоциированным с соответствующей осью. Этот принцип может использоваться как для подъема/опускания, так и для оси вращения (поворотной платформы). Для подъема, обе моды колебания состоят из чистого изгибания, тогда как для вращения, все моды колебания являются связанными колебаниями изгибания-кручения.
Согласно одному предпочтительному варианту осуществления способа согласно настоящему изобретению, вычисление SG опорного сигнала включает в себя вычисление значения деформации из среднего значения первичных сигналов SG датчиков, измеряющих вертикальное изгибание телескопической стрелы, или значения разности первичных сигналов SG датчиков, измеряющих горизонтальное изгибание телескопической стрелы, и высокочастотную фильтрацию значения деформации. Фильтрация вносит вклад в компенсацию смещения сигнала.
Согласно другому предпочтительному варианту осуществления этого способа, вычисление SG опорного сигнала дополнительно включает в себя интерполяцию значения смещения деформации из угла подъема телескопической стрелы и длины раскладывания телескопической стрелы, и корректировку значения деформации до высокочастотной фильтрации посредством вычитания значения смещения деформации из значения деформации. Вычисление значения смещения деформации компенсирует влияние силы тяжести.
Согласно другому предпочтительному варианту осуществления, интерполяция смещения деформации дополнительно основывается на длине раскладывания шарнирного манипулятора, прикрепленного к концу телескопической стрелы, и угле наклона между телескопической стрелой и шарнирным манипулятором.
Согласно еще другому предпочтительному варианту осуществления, интерполяция значения смещения деформации дополнительно основывается на массе кабины, прикрепленной к концу телескопической стрелы или к концу шарнирного манипулятора, и полезной нагрузке внутри кабины.
Согласно другому предпочтительному варианту осуществления этого способа, вычисление опорного сигнала гироскопа включает в себя вычисление обратного разностного отношения первичного сигнала из измерения углового положения угла подъема соответственно вращения, чтобы получать сигнал оценки угловой скорости, фильтрацию сигнала оценки угловой скорости посредством фильтра нижних частот, вычисление соответствующей доли фильтрованного сигнала оценки угловой скорости, которая ассоциирована с каждой осью гироскопа, вычитание этой доли фильтрованного сигнала оценки угловой скорости из исходного первичного сигнала от гироскопа, чтобы получать компенсированный сигнал гироскопа, и низкочастотную фильтрацию компенсированного сигнала гироскопа. Это осуществляется для извлечения компонент, вызванных эластичными колебаниями, из первичной измеренной угловой скорости гироскопа.
Согласно другому варианту осуществления способа согласно настоящему изобретению, вычисление значения угловой скорости компенсации включает в себя добавление компоненты управления положением, которая относится к отклонению текущего положения от опорного положения, к значению сигнала, вычисленному из восстановленных первой моды колебания и второй моды колебания.
Согласно еще другому варианту осуществления, значение угловой скорости прямой связи получается от компонента планирования траектории, вычисляющего сигнал опорной угловой скорости на основе первичного входного сигнала, которое модифицируется посредством компонента динамического устранения колебаний, чтобы уменьшать возбуждение колебаний.
Настоящее изобретение дополнительно относится к воздушному устройству, содержащему телескопическую стрелу, тензометрические (SG) датчики для обнаружения состояния изгибания телескопической стрелы в горизонтальном и вертикальном направлениях, гироскоп, прикрепленный к верхней части телескопической стрелы, и контроллер для управления перемещением воздушного устройства на основе значений сигналов, полученных от SG датчиков и гироскопа, при этом упомянутый контроллер осуществляет способ управления, как описано выше.
Согласно одному предпочтительному варианту осуществления этого воздушного устройства, по меньшей мере, четыре SG датчика расположены в двух парах, при этом каждая одна пара расположена на верхней части и в нижней части поперечного сечения телескопической стрелы, соответственно, с упомянутыми двумя SG датчиками, или каждая пара расположена на противоположных сторонах телескопической стрелы. В этом расположении, разные значения двух SG датчиков, расположенных в верхней части или в нижней части телескопической стрелы или на ее соответствующих левой и правой сторонах, могут использоваться, чтобы выводить сигнал, измеряющий горизонтальное или вертикальное изгибание телескопической стрелы.
Согласно другому предпочтительному варианту осуществления этого воздушного устройства, шарнирный манипулятор прикреплен к концу телескопической стрелы.
Согласно еще другому предпочтительному варианту осуществления, воздушное устройство дополнительно содержит спасательную кабину, прикрепленную к концу телескопической стрелы или к концу шарнирного манипулятора.
Пример предпочтительного варианта осуществления настоящего изобретения будет описываться более подробно ниже со ссылкой на следующие сопровождающие чертежи.
Фиг. 1a и b являются схематическими видами модели воздушного устройства, демонстрирующими разные параметры модели, в виде сбоку и в виде сверху;
Фиг. 2 является детальным видом воздушного устройства со спасательной кабиной, смонтированной на конце шарнирного манипулятора, демонстрирующим дополнительные параметры модели, в виде сбоку;
Фиг. 3 является другим видом сбоку полного воздушного устройства согласно одному варианту осуществления настоящего изобретения, демонстрирующим положения датчиков;
Фиг. 4 является схематическим видом системы управления, реализованной в контроллере воздушного устройства, согласно настоящему изобретению;
Фиг. 5 и 6 являются подробными схематическими видами, показывающими части системы управления из фиг. 4, демонстрирующими вычисление SG опорного сигнала и опорного сигнала гироскопа, соответственно; и
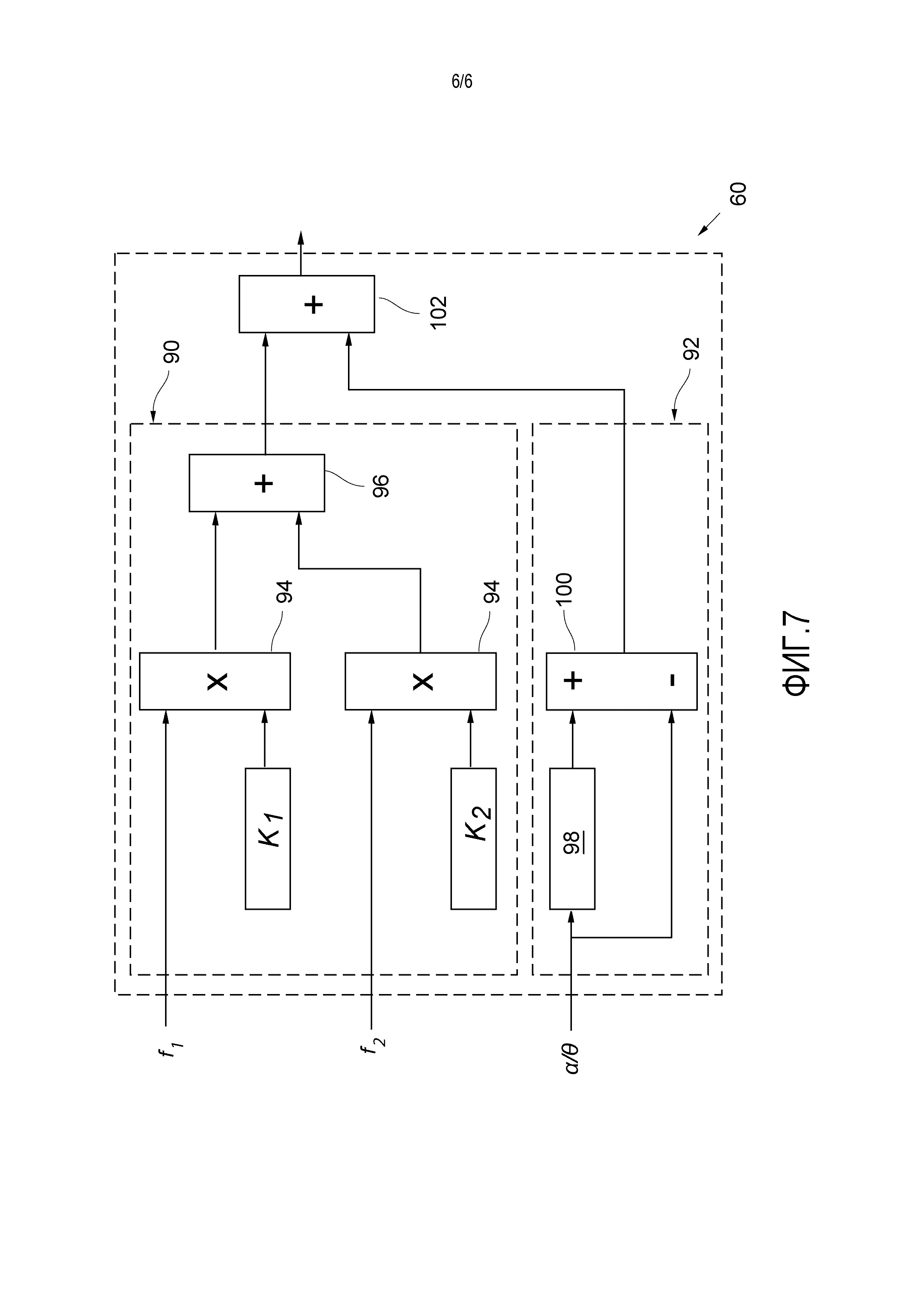
Фиг. 7 является другим детальным видом системы управления из фиг. 4, демонстрирующим вычисление значения угловой скорости компенсации.
Прежде всего, основание способа управления согласно настоящему изобретению должно описываться со ссылкой на динамическую модель, которая будет дополнительно описываться со ссылкой на фиг. 1a, 1b и 2.
Способ для активного демпфирования колебаний, который является предметом этой патентной заявки, основывается на модели, которая учитывает распределенную природу параметров материала. Так как телескопическая балка состоит из нескольких элементов, для каждого из которых основные физические параметры являются приблизительно постоянными для длины элемента, но являются обычно различными для каждого другого элемента, и вследствие перекрывания двух или более телескопических элементов, физические параметры для модели, каждый, предполагаются как кусочно-постоянные. Модели на основе этих предположений представлены в "Verteiltparametrische Modellierung und Regelung einer 60 m-Feuerwehrdrehleiter", авторов Pertsch, A. и Sawodny, O., опубликованной в at-Automatisierungstechnik 9 (Сентябрь 2012), страницы 522 по 533, и в "2-DOF Control of a Fire-Rescue Turntable Ladder", авторов Zimmert, N.; Pertsch, A. и Sawodny, O., опубликованной в IEEE Trans. Contr. Sys. Technol. 20.2 (Март 2012), страницы 438-452, для оси подъема, и в "Modeling of Coupled Bending and Torsional Oscillations of an Inclined Aerial Ladder", авторов Pertsch, A. и Sawodny, O., опубликованной в Proc. of the 2013 American Control Conference. Washington D.C., USA, 2013, страницы 4098-4103 для оси вращения. Модели, известные из этих публикаций, модифицированы, чтобы включать в себя влияния шарнирного манипулятора на эластичные колебания, и на связь изгибания и кручения.
Чтобы проиллюстрировать способ, будут показаны уравнения движения для оси вращения, включающие в себя связь изгибания и кручения. Модель, используемая, чтобы описывать эти движения, показана на фиг. 1. Там,
















где точка сверху обозначает производные по времени

и условия на непрерывность отклонения, сил и моментов на границах между каждыми двумя из



Аргументы функций





Влияния шарнирного манипулятора и кабины на балке, оба смоделированы как твердые тела, включаются в модель посредством динамических граничных условий. Положение и ориентация этих тел зависит от угла поворота








Движение поворотной платформы описывается посредством

Разделяя временную и пространственную зависимость в (1) посредством выбора

где



Такое же характеристическое уравнение следует для




Отношение между зависимыми коэффициентами



В последующем, пространственный индекс







где




Посредством усечения бесконечной системы уравнений (9) на требуемом количестве мод, получается конечномерное модальное представление, где количество мод выбирается, чтобы достигать требуемой точности модели. В последующем, описывается активное демпфирование колебаний для первых двух гармоник, которое часто является достаточным вследствие естественного демпфирования более высоких мод и ограниченной полосы частот исполнительных механизмов. Расширение до включения сюда более большого количества узлов в активном демпфировании колебаний является непосредственным.
Вводя вектор состояния


с матрицей системы




Динамики (5) поворотной платформы компенсируются посредством внутреннего контура управления, который также обеспечивает отслеживание установленной точки для требуемой угловой скорости вращения поворотной платформы. Если этот контур управления является достаточно быстрым по сравнению с собственными значениями, динамики (5) исполнительного механизма могут приближаться как задержка первого порядка

Если постоянная времени задержки



На основе описания (10) модели, сигнал обратной связи управления


С подходящим выбором усилений обратной связи, могут устанавливаться полюсы замкнутого контура, чтобы достигать требуемого динамического поведения и особенно чтобы увеличивать уровень демпфирования. Усиления




Чтобы осуществлять закон управления с обратной связью либо полного, либо частичного состояния, вектор состояния должен быть известным. В предпочтительной реализации, наблюдатель полного состояния используется, чтобы определять вектор состояния. В альтернативной реализации, частичное восстановление вектора состояния задается как решение алгебраической системы уравнений, где способ, известный из EP 2 022 749 B2, расширяется на связанные колебания изгибания-кручения. Для каждого способа, измерения колебаний являются необходимыми. Технически реализуемые решения включают в себя измерения гидравлического давления исполнительных механизмов, измерение поверхностной деформации стрелы с использованием тензодатчиков, и измерения инерции, например, с использованием акселерометров или гироскопов. Альтернативно, измерения угловой скорости в направлении изгибания, то есть, вокруг оси, ортогональной к стреле, или измерения тензодатчиков, прикрепленных к верхней или нижней стороне стрелы, могут использоваться в дополнение к тензодатчикам на сторонах. Чтобы минимизировать перекосы, вызываемые, например, посредством вертикального изгибания, используется различие между тензодатчиками на обеих сторонах, что касается горизонтального изгибания оба сигнала изменяются в противоположных направлениях вследствие положения тензодатчиков на противоположных сторонах балки. В предпочтительной конфигурации с тензодатчиками в





где



Для краткости, в дальнейшем рассматривается только уравнение измерения, как задано в (14). Более удобное представление для выходной матрицы




Результирующие преобразованные уравнения системы имеют вид

Так как преобразование соответствует чистому масштабированию переменных состояния, матрица системы является инвариантной при этом преобразовании, то есть,


Аналогично, система пространства состояний также может преобразовываться в "координаты деформации", для которых соответствующие элементы в первой строке выходной матрицы являются единицей и элементы во второй строке изменяются. Также, являются возможными комбинации обоих, например, представление первой моды в "координатах деформации" и второй в "координатах гироскопа", как для

Все из этих нормализованных представлений имеют преимущество в том, что минимизируется количество параметров системы, которые должны определяться, сохраняться и должны адаптироваться во время работы. В качестве улучшения по сравнению с EP 2 022 749 B2, описание системы в (14) учитывает, что тензодатчики также измеряют второе гармоническое колебание, и что амплитуды измерений тензодатчиков и гироскопа не являются одинаковыми. Все параметры уравнений (10) системы и выходных уравнений (16) соответственно (17) могут идентифицироваться из экспериментальных данных посредством подходящих алгоритмов идентификации параметров.
Чтобы восстанавливать эластичные колебания из измерений, сначала вращение твердого тела, вызываемое вращениями вращения поворотной платформы, вычитается из измеренного сигнала гироскопа. Угловая скорость каждой оси может получаться посредством численного дифференцирования измерений угла поднятия

В предпочтительной реализации, конструируется наблюдатель Люэнбергера, на основе представления системы с матрицей (17) измерений. Матрица системы




дополняется состояниями смещения для каждого из тензодатчиков и гироскопа, чтобы учитывать смещения, которые остаются после фильтрации. Уравнения наблюдателя задаются как

При подходящем выборе для элементов матрицы усиления наблюдателя

В альтернативной реализации, собственные моды напрямую получаются как решение линейной системы уравнений, как известно из EP 2 022 749 B2. С представлением системы, выведенным для связанных колебаний, может применяться способ, представленный там. Компенсированный и фильтрованный сигнал гироскопа


Обращение выходной матрицы является возможным, если





Для оси подъема, нежели для оси вращения, никакие влияния связи не должны учитываться, и собственные моды могут моделироваться как чистое изгибание. Обозначая изгибание в вертикальном направлении как


являются аналогичными первому уравнению движения для оси (1a) вращения, за исключением того, что никакие отклонения кручения не должны учитываться (






При соответствующей нормализации собственных функций, временная зависимость

для конечномерного приближения с двумя модами, вводится вектор состояния


Даже хотя обозначение для оси подъема было выбрано в основном идентичным обозначению для оси вращения, чтобы упрощать сравнение, все переменные в (23) ссылаются на колебания вертикального изгибания и являются независимыми от колебаний горизонтального изгибания, рассмотренных ранее. С использованием подходящего масштабирования для вектора состояния, вывод системы, заданный как измерение тензодатчиков в нижней части и гироскопа на концевой части, могут быть записаны как

На основе этого описания системы, вектор полного состояния может оцениваться с использованием наблюдателя Люэнбергера, или вектор частичного состояния посредством обращения выходной матрицы аналогично (20), что не будет повторяться подробно.
Способ демпфирования колебаний, описанный ранее, рассматривает демпфирование колебаний после того, как они были вызваны. В дополнение к этому способу, возбуждение колебаний во время активно управляемых перемещений стрелы может уменьшаться с использованием соответствующего способа управления с прямой связью. Способ управления с прямой связью состоит из двух основных частей: компонента планирования траектории и компонента динамического устранения колебаний. Компонент планирования траектории вычисляет гладкий сигнал опорной угловой скорости на основе первичного входного сигнала как управляется оператором-человеком посредством рычагов управления, или как получается из других источников, таких как автоматическое управление следования за путем. Обычно, скорость изменения и более высокие производные первичного входного сигнала являются неограниченными. Если такие первичные сигналы используются напрямую как команды для приводов, вся структура воздушной лестницы подвергается высоким динамическим силам, что дает результатом большое напряжение материала. Таким образом, должен получаться гладкий опорный сигнал скорости, с, по меньшей мере, первой производной, то есть, ускорением, но предпочтительно также второй производной, то есть, рывком, и более высокие производные являются ограниченными. Чтобы получать опорный сигнал с ограниченным рывком, может использоваться фильтр второго порядка, или нелинейный ограничитель скорости вместе с фильтром первого порядка. Фильтры могут осуществляться как фильтры с конечной (FIR) или бесконечной импульсной характеристикой (IIR). Такие фильтры улучшают отклик системы посредством уменьшения ускорений и рывка, но значительное уменьшение возбуждения особенно первой моды колебания является возможным только со значительным продлением времени отклика системы.
Чтобы улучшать устранение колебаний, может использоваться дополнительный компонент устранения колебаний. Для колебательных систем, аналогичных (9,10) соответственно (22,23), способ, основанный на концепции дифференциальной плоскостности, предложен в "Flatness based control of oscillators" автора Rouchon, P., опубликованной в ZAMM - Journal of Applied Mathematics and Mechanics, 85.6 (2005), стр. 411-421. В рамках структуры дифференциальной плоскостности, временное развитие состояний системы, которые являются здесь модами гибкого колебания, и ввода системы параметризуются с использованием так называемого виртуального "плоского вывода". На основе результатов, опубликованных автором Rouchon, временное развитие мод гибкого колебания в (10) соответственно (23), пренебрегая демпфированием и при предположении быстрого отклика исполнительного механизма, то есть, прямого ввода скорости



Производные



Таким образом, опорная траектория
Когда компонент демпфирования колебаний включен в путь сигнала прямой связи, вектор состояния в законе управления с обратной связью полного (12) соответственно частичного (13) состояния должен заменяться на отклонение от опорной траектории для состояний, которые проистекают, например, для обратной связи полного состояния (12) в

Модель, описанная выше, осуществляется в системе управления воздушного устройства 10, как показано на фиг. 3 в виде сбоку. Это воздушное устройство 10 содержит телескопическую стрелу 12, которая может вращаться как целое вокруг вертикальной оси, где θ представляет угол вращения. Более того, телескопическая стрела 12 может подниматься на угол подъема α, и шарнирный манипулятор 14, прикрепленный к концу телескопической стрелы 12, может наклоняться по отношению к телескопической стреле 12 на угол наклона φ, определенный как положительный в направлении вверх. Угловые скорости, измеряемые посредством гироскопа, определяются как mT, mE, и mR, для осей, параллельных продольной оси стрелы, оси, ортогональной к стреле и в горизонтальной плоскости, и оси, ортогональной к стреле в вертикальной плоскости, соответственно. В настоящем варианте осуществления воздушного устройства 10, гироскоп 16 располагается в точке вращения между концом телескопической стрелы 12 и шарнирным манипулятором 14.
Тензометрические датчики 18 прикрепляются к телескопической стреле 12. В настоящем примере, эти тензометрические датчики (или кратко SG датчики 18) располагаются близко к основанию 20 воздушного устройства 10. В частности, четыре SG датчика 18 расположены в двух парах. Первая пара 22 SG датчиков располагается на нижней части поперечного сечения телескопической стрелы 12, при этом каждый датчик этой пары 22 размещается на одной стороне (то есть, левой и правой стороне) телескопической стрелы 12. SG датчики второй пары 24 располагаются на верхней хорде структуры фермы телескопической стрелы 12, таким образом, что каждый SG датчик этой пары 24 прикрепляется на одной боковой стороне телескопической стрелы 12. Как результат, на каждой стороне телескопической стрелы 12, два SG датчика, включающие в себя один датчик каждой пары 22, 24, соответственно, прикреплены выше другого. Если телескопическая стрела 12 перекашивается или изгибается в бок, то есть, в горизонтальном направлении, SG датчики каждой пары 22, 24 растягиваются различным образом, так как левая и правая продольные балки в структуре телескопической стрелы 12 растягиваются различным образом. То же будет случаем с верхней и нижней балками структуры в случае вертикального изгибания телескопической стрелы 12, так что верхний и нижний SG датчики 18 растягиваются различным образом. В частности, является также возможным обнаруживать движения кручения телескопической стрелы 12 в этом расположении.
Воздушное устройство 10, показанное на фиг. 3, дополнительно содержит контроллер для управления перемещением воздушного устройства 10 на основе значений сигналов, полученных от SG датчиков 18 и гироскопа 16. Система управления, представляющая модель, описанную выше, и осуществляемая внутри этого контроллера, показана схематически на фиг. 4 и будет описываться в дальнейшем.
Одна система управления типа, показанного на фиг. 4, осуществляется для каждой оси воздушного устройства 10. Каждая система 50 управления, в общем, содержит ветвь 52 прямой связи, ветвь 54 обратной связи, и ветвь 56 вычисления сигнала управления приводом. В ветви 52 прямой связи, обрабатывается значение опорной угловой скорости как команда перемещения, которая может получаться от рычагов управления, которые управляются оператором-человеком, или которая может получаться от управления отслеживанием траекторий, например, для повторного воспроизведения ранее записанной траектории, или подобного. Ветвь 54 обратной связи выводит вычисленное значение угловой скорости компенсации, чтобы компенсировать колебания воздушного устройства 10, в частности, телескопической стрелы 12 и шарнирного манипулятора 14. Результирующие сигналы, выведенные посредством ветви 52 прямой связи и ветви 54 обратной связи, именно значение угловой скорости прямой связи, результирующее из значения опорной угловой скорости, и вычисленное значение угловой скорости компенсации, оба вводятся в ветвь 56 вычисления сигнала управления приводом, чтобы вычислять сигнал управления приводом, который может использоваться средством привода, таким как блок гидравлического привода или подобное.
Внутри ветви 54 обратной связи, первичные сигналы SGRaw, GYRaw, которые получаются от SG датчиков 18 и гироскопа 16, используются, чтобы вычислять опорные сигналы, включающие в себя SG опорный сигнал SGRef и опорный сигнал гироскопа GYRef, которые представляют значения деформации и угловой скорости, соответственно. Дополнительно, опорный сигнал углового ускорения AARef, который выводится из значений углового положения, также вычисляется как опорный сигнал. Опорные сигналы SGRef, GYRef, AARef вводятся в модуль 58 наблюдателя, вместе с дополнительными параметрами модели PAR, которые относятся к конструкции воздушного устройства 10, как, например, длины телескопической стрелы 12 и шарнирного манипулятора 14, текущий угол подъема α телескопической стрелы 12, угол наклона φ шарнирного манипулятора 14, или подобное. Из опорных сигналов SGRef, GYRef, AARef и дополнительных параметров модели PAR, модуль 58 наблюдателя восстанавливает первую моду f1 колебания и вторую моду f2 колебания, которые вводятся в модуль 60 управления для вычисления значения угловой скорости компенсации из восстановленного первой моды f1 колебания и второй моды f2 колебания. Значение угловой скорости компенсации выводится посредством модуля 62 проверки действительности и выдачи в ветвь 56 вычисления сигнала управления приводом. Проверка действительности и выдача осуществляет логику, чтобы решать, должна ли активная команда колебания выдаваться в ветвь сигнала управления приводом.
Вычисление SG опорного сигнала SGRef описывается более подробно со ссылкой на фиг. 5, показывающую ветвь 64 вычисления SG опорных сигналов. На операционном этапе, помеченном посредством ссылочной позиции 66 на фиг. 5, значение деформации VStrain вычисляется из среднего значения первичных сигналов SGRaw SG датчиков 18, измеряющих вертикальное изгибание телескопической стрелы, или альтернативно, из значения разности первичных сигналов SGRaw SG датчиков 18, измеряющих горизонтальное изгибание телескопической стрелы 12, в зависимости от соответствующей пространственной оси, которая рассматривается в этом вычислении. В случае вычисления значения деформации VStrain для подъема, то есть, рассматривая случай вертикального изгибания телескопической стрелы 12, значение смещения деформации VOff вычисляется на операционном этапе 71, по меньшей мере, из угла подъема α телескопической стрелы 12, длин L телескопической стрелы 12 и LAA шарнирного манипулятора 14, угла наклона φ между телескопической стрелой 12 и шарнирным манипулятором 14, массы кабины, прикрепленной к концу шарнирного манипулятора 14, и полезной нагрузки внутри этой кабины. Значение деформации VStrain, которое вычисляется на операционном этапе 66, корректируется посредством вычитания значения смещения деформации VOff, вычисленного на операционном этапе 71, из значения деформации (операционный этап 70). Интерполяция значения смещения деформации является эффективной, чтобы предотвращать изменения смещения, в частности, во время раскладывания и складывания или поднимания и опускания телескопической стрелы 12, чтобы не интерпретировалось как колебательное движение. Результирующее (скорректированное) значение деформации фильтруется после этого в фильтре 72 верхних частот перед выводом в качестве SG опорного сигнала SGRef в модуль 58 наблюдателя.
Этот фильтр 72 верхних частот является высокочастотным первого или более высокого порядка. Частота отсечения этого фильтра 72 верхних частот находится приблизительно на 20% собственной частоты соответствующей фундаментальной моды колебания. Из-за этой зависимости от собственной частоты, эффект фильтрации улучшается для коротких длин телескопической стрелы 12, где первая собственная частота является более высокой, чем для более больших длин, так как фильтрация изменений смещения во время разворачивания, складывания, поднимания или опускания стрелы выполняется более эффективно, так как частота отсечения может выбираться более высокой как для более длинных длин раскладывания, что укорачивает временной отклик фильтра.
Фиг. 6 показывает ветвь 74 вычисления опорного сигнала гироскопа для вычисления опорного сигнала гироскопа из первичного сигнала гироскопа для соответствующей оси. Внутри ветви 74 вычисления опорного сигнала гироскопа, обратное разностное отношение сигнала измерения углового положения вычисляется на операционном этапе 76, чтобы получать первичный сигнал оценки скорости VEst, который в свою очередь вводится в фильтр 78 нижних частот второго порядка. В случае оси для подъема, фильтрованный сигнал оценки скорости V'Est напрямую вычитается из исходного первичного сигнала GYRaw гироскопа (операционный этап 82), чтобы получать компенсированный сигнал гироскопа GYComp, который проводится через фильтр 83 нижних частот первого порядка и выводится как опорный сигнал гироскопа GYRef.
В случае оси поворота, должна получаться часть угловой скорости V'Est, которая соответствует соответствующей оси гироскопа для кручения или вращения, которая зависит от угла подъема α (операционный этап 80). После этого выполняется операция 82, как описано выше, то есть, вычитание результирующей доли фильтрованного сигнала оценки скорости V'Est из исходного первичного сигнала GYRaw гироскопа.
Ссылаясь снова на фиг. 4, в ветви 84 вычисления углового ускорения, опорный сигнал углового ускорения AARef выводится из значений угловой скорости посредством вычисления разностного отношения второго порядка, чтобы предсказывать колебания до некоторой степени. Результирующий опорный сигнал углового ускорения AARef также вводится в модуль 58 наблюдателя. Необязательно опорный сигнал углового ускорения AARef может фильтроваться.
Внутри модуля 58 наблюдателя, временное развитие первой моды колебания и второй моды колебания восстанавливаются из SG опорного сигнала, опорного сигнала гироскопа, опорного сигнала углового ускорения, и дополнительных параметров модели, относящихся к конструкции воздушного устройства 10. Это выполняется согласно следующей модели. Параметры 85, используемые в модели, сохраняются и адаптируются во время работы на основе длин L стрелы, LAA шарнирного манипулятора, угла наклона φ между телескопической стрелой и шарнирным манипулятором, и текущего груза в кабине, как необходимо для конкретной модели лестницы.
Наблюдатель Люэнбергера для оси для подъема, с вектором состояния наблюдателя, заданным в (18), задается посредством

В этой формуле


Динамические уравнения для оси поворота являются, в общем, идентичными оси подъема. Такой же вектор состояния (18) выбирается для наблюдателя, со смещениями, указывающими на соответствующие сигналы датчика. Аналогично уравнениям выше, система динамических уравнений наблюдателя Люэнбергера задается как

В этой формулировке, первая мода выбирается в координатах "деформации" и вторая в координатах "гироскопа". Что касается оси подъема, коэффициенты матрицы усиления наблюдателя L адаптируются для каждых длин и угла наклона, чтобы обеспечивать хорошее восстановление мод с достаточным ослаблением шума и возмущений. Вследствие связи колебаний изгибания и кручения, может выбираться уменьшенная матрица усиления для наблюдателя Люэнбергера, так что первая мода оценивается на основе только сигналов тензодатчиков, что дает результатом следующую структуру для матрицы усиления наблюдателя:

Здесь,

В альтернативном варианте осуществления, могут использоваться сигналы от оси гироскопа mR вместо сигналов оси mT. В этом случае, параметры ci и mi в (26) должны выбираться подходящим образом.
Параметры модели, содержащиеся в динамических уравнениях наблюдателя Люэнбергера, берутся из предварительно определенных положений хранилища в зависимости от длин раскладывания L стрелы и LAA шарнирного манипулятора, и также от угла наклона φ шарнирного манипулятора и полезной нагрузки кабины (изображено символически на фиг. 4 посредством элемента 85).
Структура модуля 60 управления показана на фиг. 7. Модуль 60 управления имеет, в общем, две ветви: именно ветвь 90 демпфирования колебаний (верхняя часть на фиг. 7) для обработки первой моды f1 колебания и второй моды f2 колебания, и ветвь 92 управления опорным положением для вычисления компоненты управления опорным положением, которая будет описываться в последующем.
В ветви 90 демпфирования колебаний, берутся первая мода f1 колебания и вторая мода f2 колебания, восстановленные посредством модуля 58 наблюдателя, и каждая из этих мод f1 и f2 умножается на коэффициент Ki(L, LAA, φ), в зависимости от длин раскладывания и угла наклона. После этого умножения (на операционных этапах 94), результирующие сигналы складываются на операционном этапе 96, чтобы получать результирующее значение сигнала, которое выводится из ветви 90 демпфирования.
В ветви 92 управления опорным положением, отклонение текущего положения (заданное посредством угла подъема α или угла вращения θ, соответственно) от опорного положения (заданного в элементе 98) вычисляется (на этапе 100 вычитания), чтобы давать результатом компоненту управления опорным положением, выводимую посредством ветви 92 управления опорным положением. Как компонента управления опорным положением, так и значение сигнала, вычисленного посредством ветви 90 демпфирования колебаний, складываются на этапе 102 сложения, чтобы давать результатом значение угловой скорости компенсации, подлежащее выводу посредством модуля 60 управления.
Как показано на фиг. 4, результирующее значение угловой скорости компенсации добавляется (элемент 104) внутри ветви 56 вычисления сигнала управления приводом к значению угловой скорости прямой связи, выведенному посредством ветви 52 прямой связи, чтобы вычислять сигнал управления приводом (ссылочная позиция 106).
В ветви 52 прямой связи, первичный входной сигнал, выведенный из устройства ручного ввода или подобного, вводится в компонент 51 планирования траектории. Сигнал опорной угловой скорости, выведенный посредством компонента 51 планирования траектории, модифицируется посредством последующего компонента 53 динамического устранения колебаний, чтобы уменьшать возбуждение колебаний, который выводит значение угловой скорости прямой связи.
Реферат
Предложен способ для управления воздушным устройством. Воздушное устройство содержит телескопическую стрелу, тензометрические (SG) датчики для обнаружения состояния изгибания телескопической стрелы в горизонтальном и вертикальном направлении, гироскоп, прикрепленный к верхней части телескопической стрелы, средство (50) управления для управления перемещением воздушного устройства на основе значений сигналов, полученных от SG датчиков и гироскопа. При осуществлении способа получают первичные сигналы SG, GYот SG датчиков и гироскопа. Вычисляют опорные сигналы из первичных сигналов SG, GY, включающих в себя SG опорный сигнал SG, представляющий значение деформации, и опорный сигнал гироскопа GY, представляющий значение угловой скорости, и опорный сигнал углового ускорения AA, выведенный из значений измерения углового положения или угловой скорости. Восстанавливают первую моду fколебания и вторую моду fколебания более высокого порядка, чем первая мода fколебания из опорных сигналов и дополнительных параметров модели PAR, относящихся к конструкции воздушного устройства. Вычисляют значения угловой скорости компенсации AVиз восстановленной первой моды fколебания и по меньшей мере одной второй моды fколебания. Добавляют вычисленное значение угловой скорости компенсации AVк значению угловой скорости прямой связи, чтобы давать результатом сигнал управления приводом. Предложено также воздушное устройство. Достигается эффективное демпфирование колебаний воздушного устройства посредством учета связи изгибания и кручения в горизонтальном направлении. Способ может аналогично применяться для демпфирования колебаний в вертикальном направлении, возможно включающих в себя влияния шарнирного манипулятора и кабины, прикрепленной к концу шарнирного манипулятора, для обеих осей. 2 н. и 10 з.п. ф-лы, 8 ил.
Комментарии