Оптический тактильный датчик - RU2371686C2
Код документа: RU2371686C2
Чертежи












Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к оптическому тактильному датчику, и, более точно, - к тактильному датчику, используемому для получения сил, приложенных к относительно большей площади.
Предшествующий уровень техники
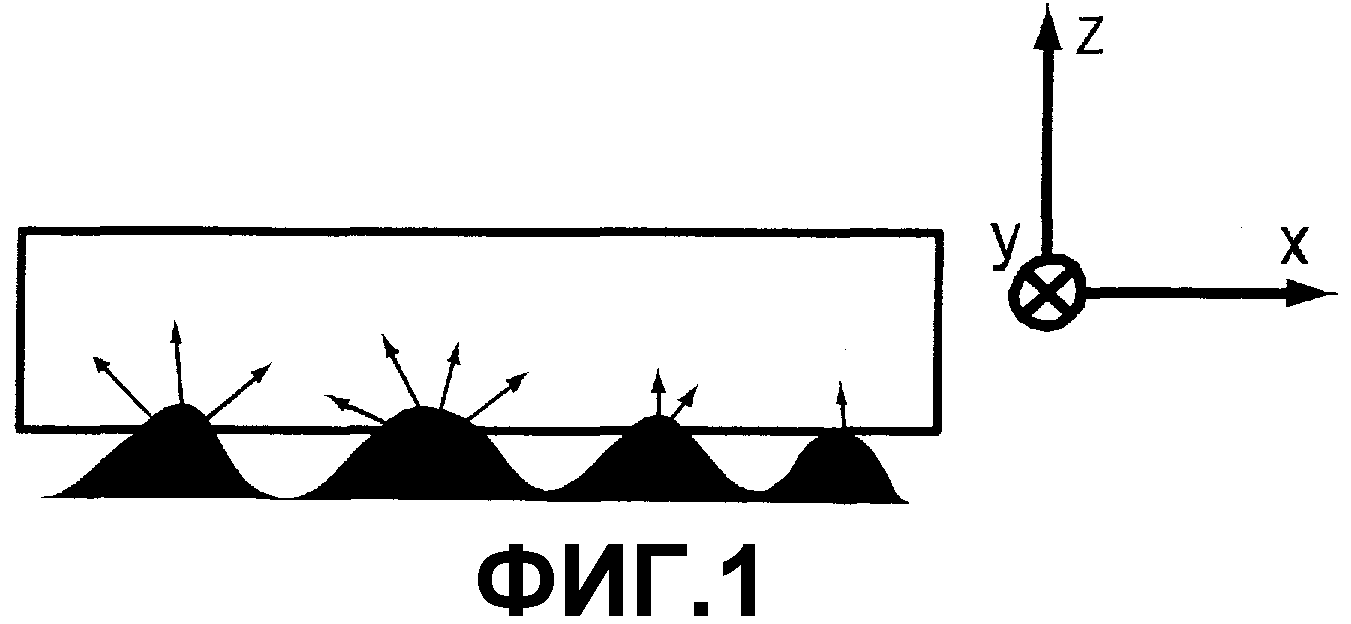
При рассмотрении понятия контактного состояния контактной поверхности с использованием тактильного датчика имеют в виду вектор с тремя компонентами, представляющими величину и направление силы, действующей в каждой точке контактной поверхности. Это представлено как f(x,y) в системе координат (фиг.1). Здесь f является вектором, и поэтому фактически имеет три компоненты x, y и z в каждой точке. При подробном выражении каждой компоненты это можно представить как f(x,y)=[fx(x,y),fy(x,y),fz(x,y)]. Так как распределение силы имеет три компоненты в каждой точке контакта, чтобы восстановить распределение сил, действующих в каждой точке контактной поверхности при использовании тактильного датчика, необходимо получить информацию для каждой контактной точки на контактной поверхности по меньшей мере с тремя степенями свободы.
Была предложена конструкция оптического тактильного датчика, который может измерять трехмерное распределение вектора силы. Принцип работы оптического тактильного датчика будет объяснен со ссылкой на фиг.2. Оптический тактильный датчик содержит прозрачный гибкий корпус и телекамеру на приборах с зарядовой связью. Путем фотографирования сферических маркеров, расположенных в прозрачном гибком корпусе, с помощью телекамеры на приборах с зарядовой связью измеряется информация о внутренней деформации гибкого корпуса, когда сила прикладывается к поверхности гибкого корпуса и восстанавливается распределение вектора силы из полученной информации.
Получают изображения сферических маркеров с помощью телекамеры на приборах с зарядовой связью в z-направлении, при этом поверхность гибкого корпуса рассматривается как плоскость x-y, а направление, перпендикулярное к плоскости x-y, является осью z. Перемещение точки, которое измеряется, когда прикладывается сила, вычисляется как вектор перемещения в плоскости x-y. Для восстановления распределения вектора силы на основе информации о деформации N×N красных сферических маркеров и синих сферических маркеров располагают на различной глубине в гибком корпусе в качестве точек, для которых проводятся измерения для получения двух наборов двумерных векторов перемещения с различной глубиной в качестве двух частей различной информации, тем самым увеличивается количество информации для восстановления распределения вектора силы.
В качестве использования такого оптического тактильного датчика рассматривается его использование для руки человекоподобного робота и при этом рассмотрение сосредотачивается на маленьком датчике встроенного типа. Однако предполагается, что такой оптический тактильный датчик, который способен измерять трехмерное распределение вектора силы и имеет гибкую поверхность, найдет применение в разнообразных областях, не только для руки робота.
В качестве одного из возможных применений можно рассмотреть использование оптического тактильного датчика как, так называемого, тактильного датчика внешнего типа. В этом описании, в отличие от тактильного датчика встроенного типа, который используется в руке робота, рассматривается тактильный датчик, который используется в фиксированном месте окружающей среды, и определяется как тактильный датчик внешнего типа. Однако в качестве тактильного датчика внешнего типа, который используется в фиксированном месте окружающей среды, предполагается, что будет необходимо измерение распределения силы на большой площади, потому что считается, что такой датчик может применяться, например, на поверхности сиденья стула, поверхности кровати, пола и т.п. Это затрудняет применение традиционно небольшого оптического тактильного датчика, который, встраивается в руку робота (см., например, патент WO 02/188923 A1).
Сущность изобретения
Технической задачей настоящего изобретения является создание оптического тактильного датчика, способного измерять распределение силы на большой площади.
Другой задачей настоящего изобретения является создание способа получения информации с помощью маркеров и способа формирования целого изображения с помощью маркеров, который позволяет измерять распределение силы на большой площади.
Еще одной задачей настоящего изобретения является разработка способа восстановления вектора силы, используемого в оптическом тактильном датчике, способном измерять распределение силы на большой площади.
Поставленная задача в соответствии с настоящим изобретением решена путем создания оптического тактильного датчика, содержащего тактильную часть, имеющую прозрачный гибкий корпус и множество маркеров, расположенных в корпусе, и средство формирования изображения для получения изображения маркера путем фотографирования поведения маркеров, когда объект контактирует с контактной поверхностью прозрачного гибкого корпуса. Оптический тактильный датчик характеризуется тем, что средство формирования изображения содержит множество устройств формирования изображения, каждое из которых выполнено так, что каждая из множества областей формирования изображения, которая записывается с использованием соответствующего устройства формирования изображения, имеет область перекрытия изображения с частичным перекрытием, а оптический тактильный датчик, дополнительно, содержит средство объединения каждого из изображений маркера, которые получены с использованием множества устройств формирования изображения, при этом средство объединения изображений предназначено для объединения области формирования изображения так, что идентичные маркеры в областях перекрытия изображения соответствуют друг другу, посредством чего формируется объединенное изображение.
В соответствии с одним предпочтительным аспектом изобретения тактильная часть содержит тактильную часть большой площади, которая сформирована путем объединения множества тактильных частей малой площади. Следует отметить, что в этом описании под «большой площадью» подразумевается площадь, большая по сравнению с такой тактильной частью, как находящаяся в руке робота, в то время, как под «малой площадью» подразумевается площадь, меньшая по сравнению с «большой площадью». Поверхность сиденья стула, поверхность кровати, поверхность пола и т.п. могут быть отнесены к примерам «большой площади», объекты, которые несколько меньше перечисленных, также включаются в понятие «большая площадь».
Кроме того, предпочтительно, чтобы тактильный датчик содержал блок, состоящий из одной тактильной части малой площади и одного средства формирования изображения, соответствующего тактильной части малой площади. Тактильный датчик сформирован путем объединения множества блоков. Формирование тактильного датчика, использующего чувствительные блоки, обеспечивает создание тактильной части, имеющей требуемую площадь.
Настоящее изобретение касается другой технической методики, включающей способ получения изображения маркера с использованием оптического тактильного датчика, содержащего тактильную часть, имеющую прозрачный гибкий корпус и множество маркеров, расположенных в нем, и средство формирования изображения для получения изображения маркера путем фотографирования поведения маркера, когда объект контактирует с контактной поверхностью прозрачного гибкого корпуса. Способ получения информации о маркере содержит этап использования множества устройств формирования изображения в качестве средств формирования изображения и получения частичного изображения маркера путем фотографирования частичной области прозрачного гибкого корпуса путем использования каждого из множества устройств формирования изображения, так что каждое устройство формирования изображения имеет область перекрытия изображений, и этап формирования объединенного изображения маркера путем объединения частичных изображений маркеров, полученных при использовании средства формирования изображения, так что идентичные маркеры в областях перекрытия фотографий соответствуют друг другу.
Настоящее изобретение использует еще одну техническую методику, включающую способ объединения изображений маркеров, который используется в оптическом тактильном датчике, содержащем тактильную часть, имеющую прозрачный гибкий корпус и множество маркеров, расположенных в корпусе, и множество устройств формирования изображения для получения изображения маркера путем фотографирования поведения маркера, когда объект контактирует с контактной поверхностью прозрачного гибкого корпуса. Способ объединения изображения содержит этап получения частичного изображения путем фотографирования частичной области прозрачного гибкого корпуса с использованием каждого из множества устройств формирования изображения, так что каждое устройство формирования изображения имеет область перекрывающихся изображений, и стадию объединения частичных изображений, полученных с использованием средства формирования изображения, таким образом, что идентичные маркеры в областях перекрытия фотографий соответствуют друг другу.
Что касается конструкции тактильного датчика, предпочтительно, чтобы тактильная часть содержала прозрачный гибкий корпус и множество групп маркеров, расположенных внутри гибкого корпуса, причем каждая группа маркеров содержит множество окрашенных маркеров, при этом маркеры в различных группах маркеров имеют различную окраску. Устройство формирования изображения фотографирует поведение окрашенных маркеров в прозрачном гибком корпусе, когда объект контактирует с поверхностью гибкого корпуса.
Также настоящее изобретение включает калибровку каждого средства формирования изображения при использовании считывающего маркера. Поскольку настоящее изобретение содержит множество устройств формирования изображения, требуется калибровка средств формирования изображения. Поскольку настоящее изобретение имеет в качестве основной компоненты считывающий маркер, этот маркер также может быть использован как калибровочный маркер. Кроме того, настоящее изобретение также включает способ восстановления вектора силы при использовании такого оптического тактильного датчика. Когда вектор силы вычисляется без данных о поведении маркера с меньшим вкладом в вычисления вектора силы, может быть уменьшено время, которое требуется для вычисления вектора силы.
В соответствии с настоящим изобретением, поскольку информация о поведении маркера получается при использовании множества средств формирования изображения, можно предпочтительно управлять даже тактильной частью, имеющей большую площадь. Следовательно, использование датчика в соответствии с настоящим изобретением позволяет измерять распределение вектора силы на большой площади, что, в свою очередь, позволяет определять силу, приложенную к контактной поверхности, имеющей большую площадь, на основе полученной информации о маркере. Кроме того, поскольку считывающий маркер может использоваться для объединения данных об изображении, полученных с помощью средств формирования изображения и калибровки соответствующих средств формирования изображения, датчик может быть сформирован при использовании меньшего числа элементов.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопровождающие чертежи, на которых:
Фиг.1 изображено распределение векторов сил, приложенных между тактильным датчиком и объектом, находящимся с ним в контакте;
Фиг.2 - принцип оптического тактильного датчика, причем сверху показан вид сверху (изображение, полученное с помощью камеры на приборах с зарядовой связью) прозрачного гибкого корпуса, а снизу показан вид сбоку прозрачного гибкого корпуса, в котором размещены две группы маркеров. Когда сила прикладывается к прозрачному гибкому корпусу снизу, маркер перемещается из положения, показанного на левой схеме, к положению, показанному на правой схеме;
Фиг.3 - схема оптического тактильного датчика согласно изобретению;
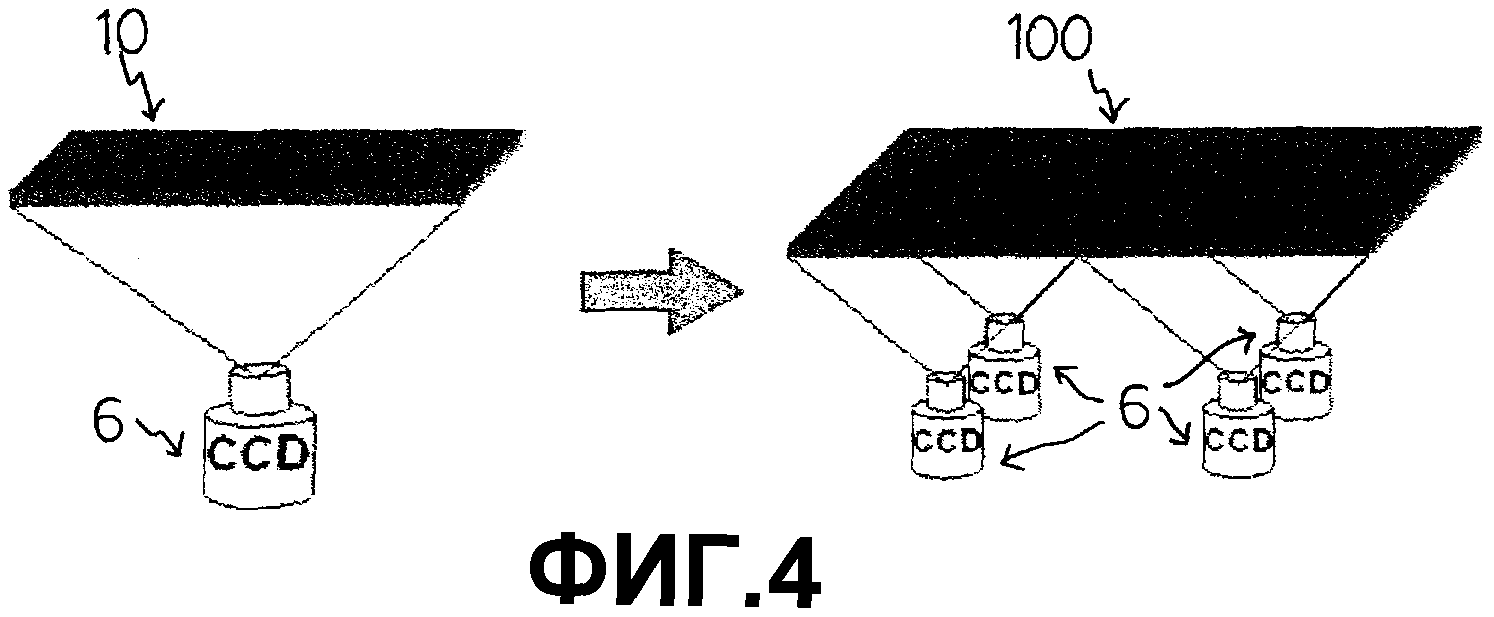
Фиг.4 - схема увеличения площади поверхности датчика, причем слева показан блок, содержащий одну камеру на приборах с зарядовой связью и часть гибкого корпуса, а справа показан результат увеличения площади при объединении блоков, согласно изобретению;
Фиг.5 - схема способа объединения данных об изображении, которые получаются при использовании множества средств формирования изображения, согласно изобретению;
Фиг.6 - схема данных об изображении, которые получаются при использовании датчика, показанного на фиг.4, согласно изобретению;
Фиг.7 - схема вектора силы, приложенного к контактной поверхности (плоская поверхность) и перемещение маркера, согласно изобретению;
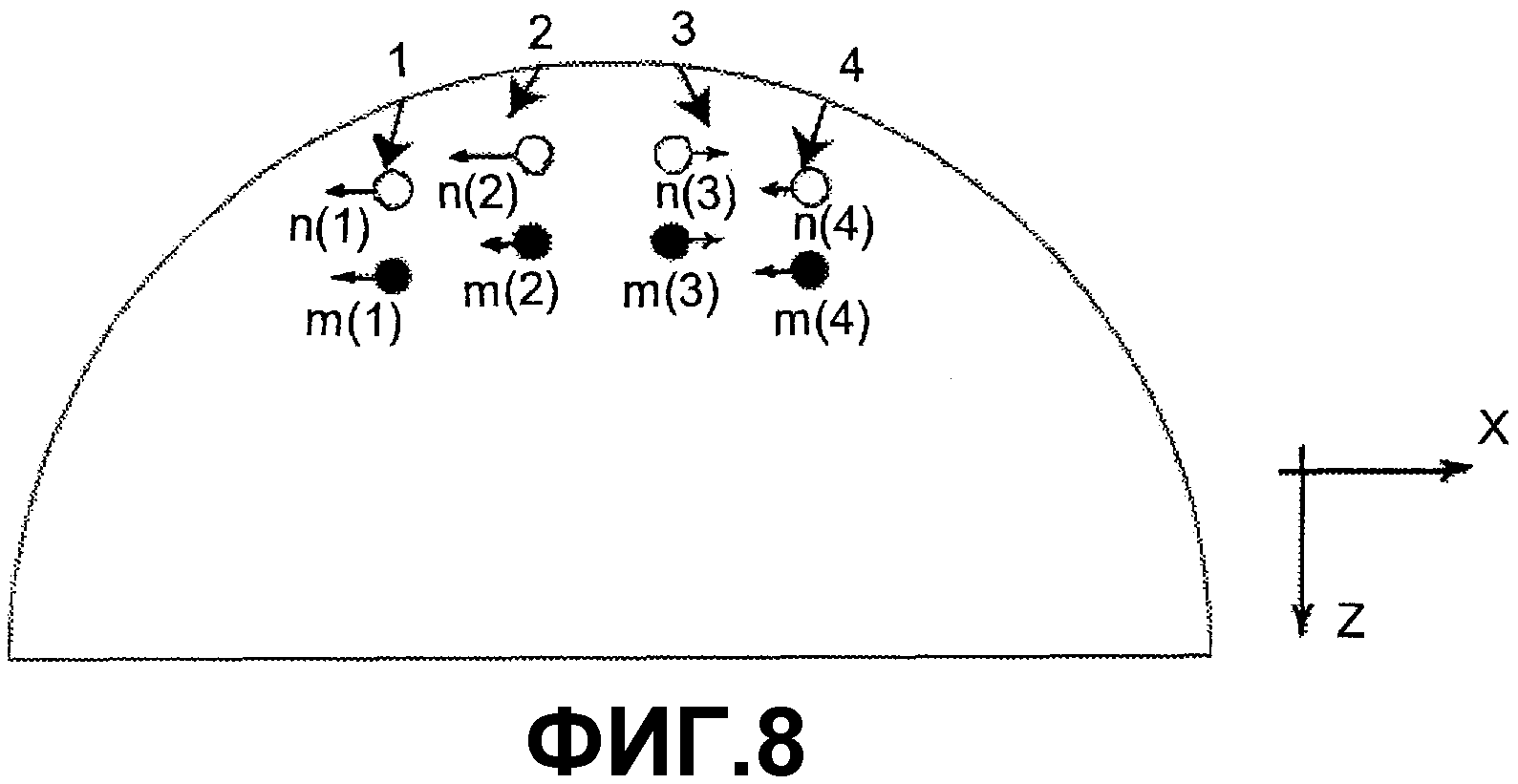
Фиг.8 - схема вектора силы, приложенного к контактной поверхности (свободно искривленная поверхность) и перемещение маркера, согласно изобретению;
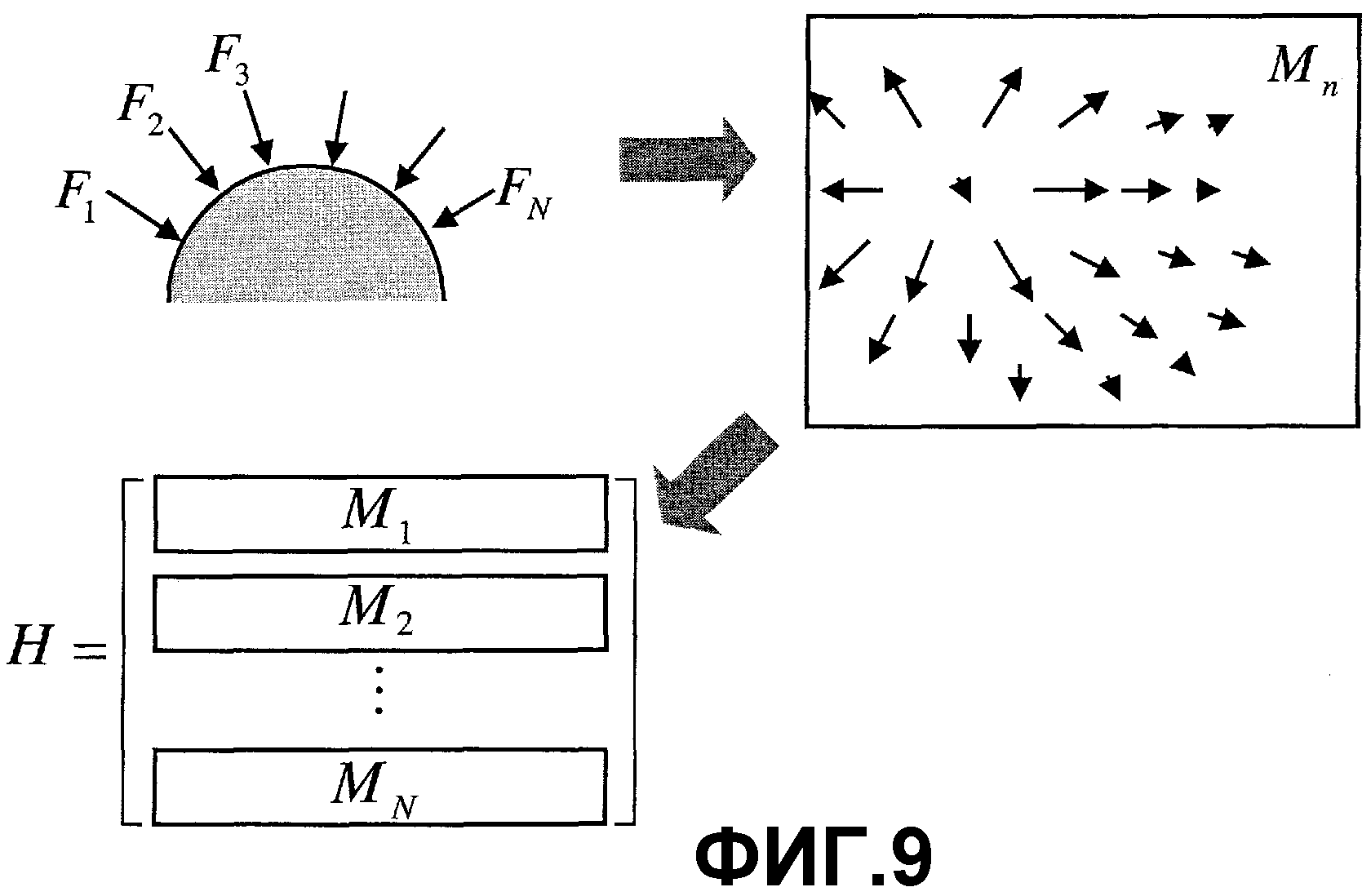
Фиг.9 - схема способа создания передаточной функции для использования при восстановлении распределения вектора силы, согласно изобретению;
Фиг.10 - схема объединенного изображения, полученного при использовании множества камер, и способ уменьшения времени, которое требуется для расчетов при восстановлении вектора силы, в котором, при расчете силы, приложенной в точке, используются данные только для маркеров, расположенных вблизи этой точки, согласно изобретению;
Фиг.11 - схема, объясняющая улучшенный способ с уменьшенным количеством вычислений, на чертеже черные и белые круги представляют выборочные точки для силы, а черный круг показывает результат вычисления, который используется после вычислений, согласно изобретению;
Фиг.12 - схема, показывающая увеличенное количество маркеров, согласно изобретению;
Фиг.13 - схема, показывающая увеличенное количество маркеров и перемещение маркера под действием силы, приложенной в одной точке, согласно изобретению;
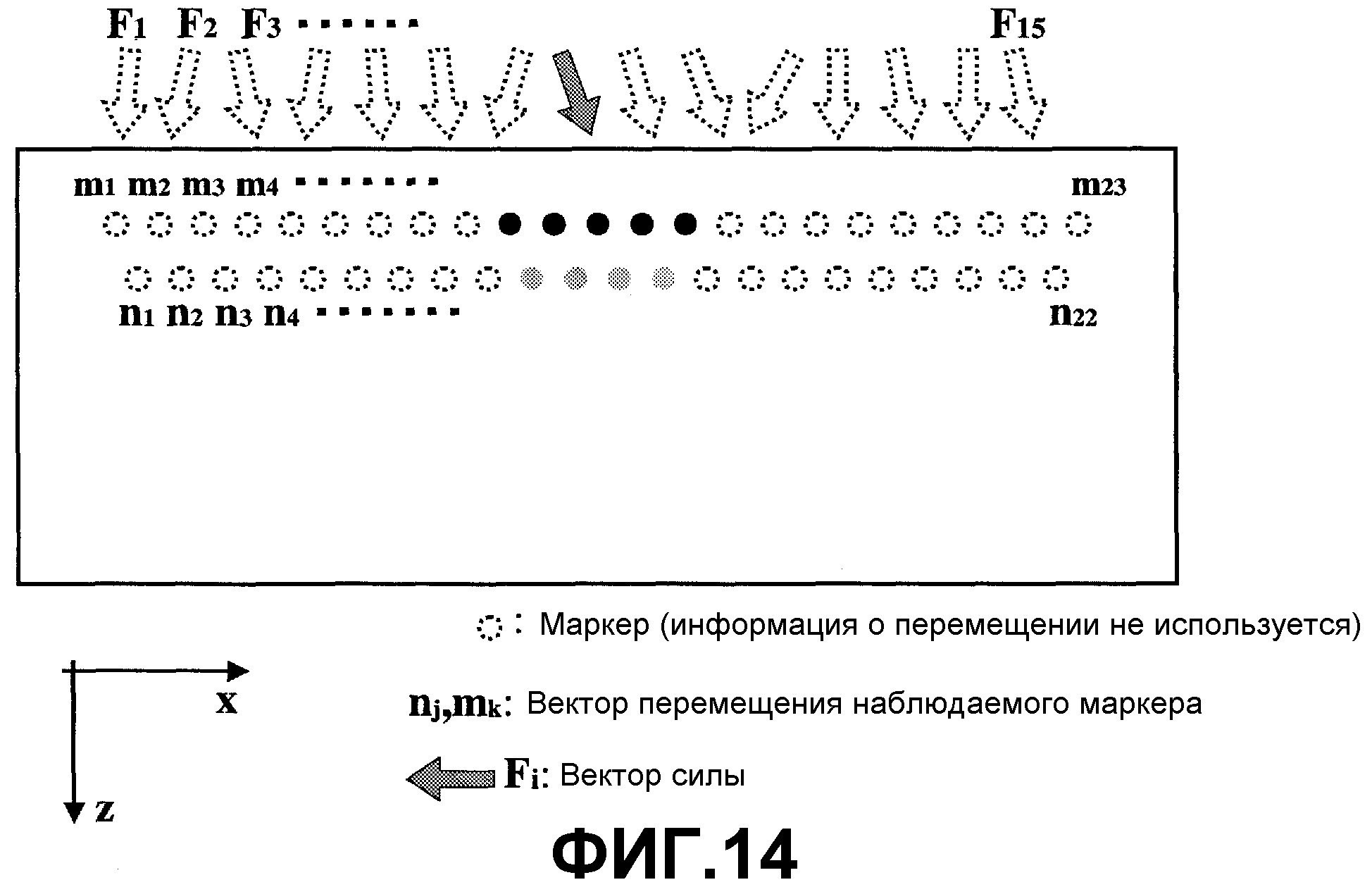
Фиг.14 - схема способа увеличения скорости согласно изобретению;
Фиг.15 - схема улучшенного способа согласно изобретению;
Фиг.16 - схема другого варианта реализации маркера (цилиндрический маркер) согласно изобретению;
Фиг.17 - схема еще одного варианта реализации маркера, где верхняя схема показывает ступенчатый полосовой маркер, а нижняя схема показывает пирамидальный маркер, согласно изобретению;
Фиг.18 - схема еще одного варианта реализации маркера (на основе перекрещивающихся полос) согласно изобретению;
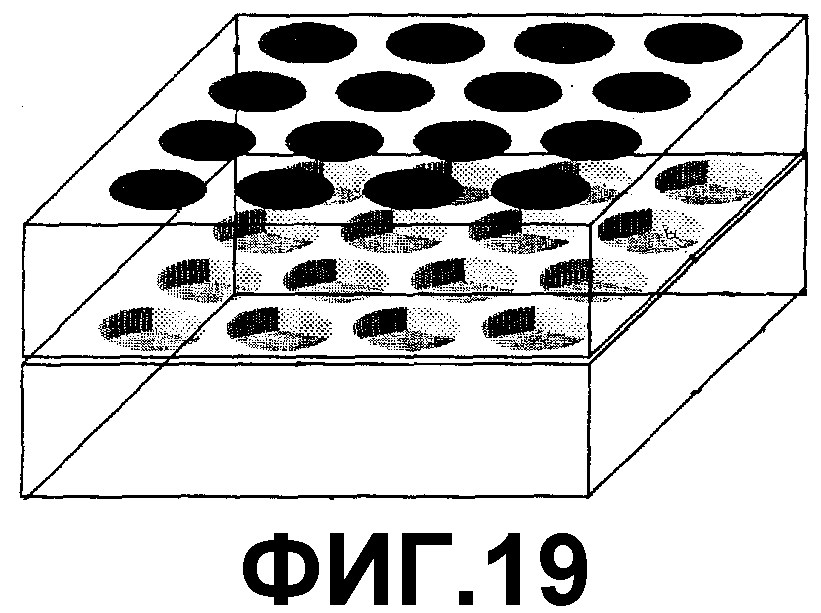
Фиг.19 - схема еще одного варианта реализации маркера (плоский маркер на основе выделенных цветов) согласно изобретению.
Подробное описание предпочтительных вариантов реализации изобретения
[А] Основная конструкция оптического тактильного датчика
Оптический тактильный датчик согласно изобретению содержит чувствительную тактильную часть и средство формирования изображения. Тактильная часть содержит прозрачный гибкий корпус и множество групп маркеров, расположенных в указанном корпусе, при этом каждая группа маркеров содержит набор окрашенных маркеров, маркеры, составляющие различные группы маркеров, имеют различную окраску в каждой группе. Средство формирования изображения служит для получения изображения, показывающего поведение окрашенных маркеров, когда поверхность гибкого корпуса находится в контакте с объектом для получения изображений маркеров. Сила, приложенная к поверхности, восстанавливается на основе информации о поведении маркеров, которая получается на основе изображений маркеров.
По меньшей мере одна из характеристик: смещение, деформация и наклон окрашенных маркеров, в том случае, когда гибкий корпус касается объекта, наблюдается при фотографировании поведения окрашенных маркеров. Информацию о деформации внутри прозрачного гибкого корпуса получают из информации о поведении окрашенных маркеров, когда вступающий в контакт объект касается датчика, при этом получают информацию о форме вступающего в контакт объекта на основании информации о деформации, а также о силе, действующей на контактной границе раздела (включая поверхность гибкого корпуса и поверхность вступающего в контакт объекта). В соответствии с настоящим изобретением возможно по отдельности собирать множество видов информации с помощью простого метода, называемого «цветовое кодирование», и при этом возможно получать множество видов тактильной информации с помощью оптической системы. В соответствии с настоящим изобретением независимую наблюдаемую информацию, число наблюдаемых величин которой равно или больше числа неизвестных, получают при использовании цветового кодирования, возможно оценить и восстановить векторы силы путем решения обратной задачи.
Окрашенные маркеры фотографируют с помощью фотографического устройства, в предпочтительном примере - телекамеры на приборах с зарядовой связью, и осуществляют обработку изображения с помощью процессора. Например, изображение во время контакта корпуса с объектом и изображение в предыдущем состоянии (т.е. состоянии, когда внешняя сила не действует на прозрачный гибкий корпус) сравнивают и определяют величину смещения маркеров (вектор перемещения). С другой стороны, маркеры размещены в прозрачном гибком корпусе так, что обычно они не могут быть распознаны (в состоянии, когда внешняя сила не действует на прозрачный гибкий корпус), и конфигурация такова, что маркеры распознают в ответ на деформацию смещения и наклон маркеров, вызванный деформацией вблизи от положений, в которых существует каждый маркер в том случае, когда объект контактирует с прозрачным гибким корпусом, и информацию детектируют при появлении окрашенных маркеров. В другом предпочтительном аспекте поведение маркеров (например, ступенчатых полосовых маркеров) может быть получено на основе изменения интенсивности маркера.
Оптический тактильный датчик сохраняет передаточную функцию, в соответствии с которой векторы сил или распределение векторов сил, приложенных к поверхности гибкого корпуса, восстанавливаются на основе информации, касающейся поведения маркеров (например, векторов перемещения каждого маркера, когда объект вступает в контакт с поверхностью), полученной с помощью устройства фотографирования. Передаточная функция представляет собой функцию, которая связывает информацию о силе, приложенной к поверхности датчика, с информацией, касающейся поведения маркеров (например, вектора перемещения). Видеоинформацию о маркерах получают путем фотографирования окрашенных маркеров, когда объект контактирует с чувствительной поверхностью гибкого корпуса, и информацию, касающуюся поведения маркеров, получают из видеоинформации о маркерах. Вектор силы получают на выходе при введении полученной информации в передаточную функцию. Количество наблюдаемых величин, относящихся к информации, касающейся поведения маркеров, которая вводится в передаточную функцию, больше, чем количество полученных векторов силы.
Передаточная функция, в зависимости от формы гибкого корпуса, может получаться на основе уравнения, полученного из теории упругости. Однако, когда поверхность гибкого корпуса является произвольно искривленной поверхностью, передаточная функция предпочтительно получается путем измерения или моделирования. Передаточная функция, полученная путем измерения или моделирования, может формироваться на основе информации (векторов перемещения), касающейся поведения маркеров, когда силы в x-направлении, y-направлении и z-направлении, имеющие заданную величину, прикладываются к пробным точкам, расположенным на поверхности датчика.
На фиг.3 показана конструкция оптического тактильного датчика настоящего изобретения. Датчик содержит прозрачный гибкий корпус 1, изготовленный из прозрачного эластичного материала, и искривленную поверхность 2 или поверхность для считывания. Прозрачный гибкий корпус 1 снабжен множеством окрашенных маркеров 3, 4, введенных в прозрачный гибкий корпус 1 вблизи от поверхности 2 и вдоль искривленной поверхности 2. Чувствительная часть содержит прозрачный гибкий корпус 1 и окрашенные маркеры 3, 4, расположенные внутри гибкого корпуса.
Окрашенные маркеры 3, 4 содержат две группы окрашенных маркеров, которые размещены соответственно на различной глубине от поверхности 2. Окрашенные маркеры 3, составляющие одну группу маркеров, и окрашенные маркеры 4, составляющие другую группу маркеров, имеют различную окраску. Например, одна группа маркеров состоит из множества синих маркеров 3, и другая группа маркеров состоит из множества красных маркеров 4.
Когда объект 5 контактирует с прозрачным гибким корпусом 1, окрашенные маркеры 3, 4, расположенные внутри прозрачного гибкого корпуса 1, смещаются благодаря внутренней деформации гибкого корпуса. Датчик также снабжен камерой 6 в качестве фотографирующего устройства и источником света 7. Оптическая камера 6 расположена на стороне, противоположной стороне контакта с объектом 5, поэтому прозрачный гибкий корпус 1 расположен между оптической камерой 6 и объектом 5, и поведение или перемещение маркеров 3, 4 фотографируется камерой 6. Источник света 7 может передавать световое излучение по волноводу, например оптическому волокну. Изображения маркеров 3, 4, полученные с помощью камеры 6 как средства формирования изображения, передаются на компьютер 8, и изображения маркеров отображаются на дисплее. Процессор компьютера 8 просчитывает информацию о маркере (вектора перемещения в качестве информации о перемещении), касающуюся поведения (смещения, деформации или наклона) маркеров. Процессор восстанавливает распределение сил, приложенных к поверхности 2 со стороны объекта 5, используя информацию о маркере (информацию о перемещении) и передаточную функцию, которая сохраняется в памяти устройства компьютера 8.
Прозрачный гибкий корпус 1 предпочтительно изготовлен из силиконовой резины, но также он может быть выполнен из другого эластичного материала, из другого типа резины или эластомера. Маркеры предпочтительно изготавливают из эластичного материала, и, более предпочтительно, из того же материала, что и прозрачный гибкий корпус 1. В одном предпочтительном варианте реализации они формируются при добавлении пигмента к силиконовой резине. Так как деформация гибкого корпуса не должна подавляться маркерами, маркеры также предпочтительно изготавливают из эластичного материала (предпочтительно имеющего такую же постоянную упругости, как и гибкий корпус). Материал маркеров особо не ограничивается, поскольку расстояние, до которого деформация гибкого корпуса подавляется, является достаточно малым. Также возможно, чтобы маркеры составляли часть гибкого корпуса.
В настоящем изобретении множество оптических маркеров распределены внутри прозрачного гибкого корпуса 1, и информация о вступающем в контакт объекте и информация о смещении и деформации внутри гибкого корпуса, полученные за счет контакта, фиксируются при фотографировании камерой ситуаций, когда смещение, деформация и наклон возникают в маркерах из-за деформации гибкого корпуса 1 как результат контакта объекта и гибкого корпуса 1 при использовании камеры. На фиг.3 показаны две группы маркеров, но количество групп маркеров не ограничивается, и три группы маркеров могут располагаться в виде слоев вдоль поверхности 2.
Камера, как устройство фотографирования, является цифровой камерой, а именно камерой для вывода данных изображения в виде электрических сигналов, и в одном предпочтительном варианте реализации она представляет собой телекамеру на приборах с зарядовой связью. Также возможно применять, например, цифровую камеру, использующую датчик изображения типа КМОП (C-MOS). Если три типа маркеров представляют собой красные, зеленые и синие маркеры, существует два способа восприятия этих трех цветов по отдельности. Первый способ состоит в использовании для выделения цветных светофильтров, при этом каждый маркер может рассматриваться как индивидуально сфотографированный при рассмотрении сигнала «красный-зеленый-синий», выходящего из камеры. Второй способ представляет собой способ, когда элементы формирования изображения воспринимают только интенсивность света, и изготавливаются световые источники «красный-зеленый и синий». Когда красный светится, свет отражается только от красных маркеров, в то время, как красный свет поглощается маркерами двух других цветов, и поэтому камера эффективно воспринимает только красные маркеры. Если это также осуществляется в течение отдельного времени для зеленого и синего цвета, может быть получена информация, эквивалентная той, которая получается при использовании первого способа.
[В] Тактильный датчик внешнего типа
Ниже описан вариант реализации тактильного датчика внешнего типа в соответствии с настоящим изобретением. Тактильный датчик внешнего типа содержит множество блоков. Как показано слева на фиг.4, блок датчика содержит одну тактильную часть 10 малой площади и одну телекамеру 6 на приборах с зарядовой связью, которая служит средством формирования изображения для фотографирования тактильной части 10 малой площади. Как описано выше в связи с основной структурой, тактильная часть 10 малой площади содержит прозрачный гибкий корпус и окрашенные маркеры, расположенные внутри прозрачного гибкого корпуса. Когда объект вступает в контакт с чувствительной поверхностью прозрачного гибкого корпуса, окрашенные маркеры, расположенные внутри прозрачного гибкого корпуса, перемещаются, и телекамера 6 на приборах с зарядовой связью фотографирует перемещения окрашенных маркеров. Затем, как показано справа на фиг.4, множество блоков датчика объединяются для формирования поверхности датчика, имеющей большую площадь. При настилании тактильных частей 10 малой площади таким образом, чтобы сформировалась плоскость с краями тактильных частей, примыкающими друг к другу, образуется тактильная часть 100 большой площади. Показанная тактильная часть 10 малой площади имеет квадратную форму на виде сверху. Хотя форма тактильной части малой площади не ограничивается квадратной, тактильная часть квадратной формы является преимущественной, когда настилается множество тактильных частей малой площади. Хотя на чертеже показана тактильная часть малой площади, имеющая плоскую чувствительную поверхность 10, чувствительная поверхность 10 не ограничивается плоской формой. Подходящей является чувствительная поверхность, имеющая произвольную искривленную форму.
Поскольку используется множество телекамер 6 на приборах с зарядовой связью, необходимо объединение данных об изображении, полученных с использованием соответствующих телекамер 6. На фиг.5 показана схема, объясняющая объединение изображений, полученных при использовании множества камер. Такое изображение отображается, например, на дисплее компьютера 8. Первоначально, при использовании множества телекамер 6, изображения тактильной части 10 малой площади выполняют таким образом, что соответствующие области фотографий частично перекрывают друг друга. Следовательно, соответствующие изображения, полученные с помощью камер, объединяются, так что маркеры в области перекрытия фотографий 11 соответствуют друг другу, соответственно объединяя данные об изображении. На фиг.5 черный круг представляет синий маркер, а белый круг представляет красный маркер, и области фотографии телекамеры 1 и телекамеры 2 имеют область перекрытия фотографий 11. Синие и красные маркеры внутри области, соответствующей области перекрытия фотографий 11 в области фотографий для камеры 1, а также эти маркеры внутри области, соответствующей области перекрытия фотографий 11 в области фотографий для камеры 2, приводятся в соответствие друг с другом, в результате чего частичные изображения, полученные с использованием камеры 1 и камеры 2, объединяются. Нужно отметить, что хотя здесь дается ссылка на сферический маркер, маркер другой формы, как описано ниже, может аналогично использоваться для объединения изображения.
Изображение, полученное с помощью четырех телекамер на приборах с зарядовой связью (фиг.4), представлено на фиг.6. Предположим, что соответствующие области фотографий, сфотографированные соответствующими телекамерами, на приборах с зарядовой связью обозначены как А, В, С и D, области фотографий А, В, С и D объединяются таким образом, что области перекрывающихся фотографий 11 появляются в областях А и В, областях А и С, областях В и D, областях С и D соответственно. Нужно отметить, что маркеры исключены из фиг.6. Каждая камера конструируется таким образом, чтобы фотографировать поведение маркеров, расположенных в области, размещенной перед камерой, и соответственно размещаемые области имеют взаимно пересекающиеся части. В соответствии с одним аспектом изобретения каждая из соответствующих камер устанавливается впереди так, чтобы фотографировать предварительно заданную частичную область прозрачного гибкого корпуса, и сконструирована так, что объединение изображений соответствующих предварительно заданных частичных областей, полученное при использовании соответствующих камер, позволяет формировать полное изображение прозрачного гибкого корпуса.
Ниже описывается калибровка камеры, которая необходима, когда используется множество средств формирования изображения (телекамер на приборах с зарядовой связью). В общем, калибровка камеры применяется для коррекции искажения, возникающего в полученном изображении из-за линз, а также для определения положения и ориентации камеры во внешней системе координат. Появление искажений из-за линзы является неизбежным при использовании широкой линзы. Положение и ориентация камеры наиболее точно определяются при использовании данных об изображении. В этом тактильном датчике, поскольку должна быть определена корреляция между данными об изображении и реальным положением, необходимо осуществлять калибровку камеры. В общем, в измерительной системе, использующей множество камер, должна осуществляться следующая процедура. Первоначально полосатый или черно-белый керамический образец с известными интервалами размещают в положении, которое известно по отношению к внешней системе координат, и образец фотографируют. Затем вычисляют смещение по сравнению с изображением, которое было бы получено, когда линза не имеет искажения, с использованием полученного изображения, и определяют искажения линзы, положение и ориентацию камеры. В тактильном датчике внешнего типа, который аналогично использует множество камер, полосатый или черно-белый керамический образец с известными интервалами располагают в известном положении как окрашенный маркер для считывания, служащий в качестве изображения. Следовательно, калибровка камеры, которая изначально должна проводиться перед сборкой измерительной системы, может проводиться в любое время после сборки.
[С] Способ восстановления распределения вектора силы на чувствительной поверхности
Для получения распределения вектора силы, приложенной к поверхности датчика, на основе информации, полученной от оптического тактильного датчика (векторов перемещения маркеров), касающейся поведения маркеров, требуется преобразование информации М (информации о перемещении), касающейся поведения маркеров, в информацию F о силе. Преобразование информации М о поведении маркеров в информацию F о силе производится на основе уравнения F=HM. Со ссылкой на фиг.7 и 8 будет описан способ восстановления распределения вектора силы на основе информации о маркерах, в основе которого лежит способ получения распределения вектора силы на основе векторов перемещения маркеров. На фиг.7 показана плоская чувствительная поверхность, а на фиг.8 показана произвольно искривленная чувствительная поверхность. Для упрощения рассматривается только двумерное сечение (направление вдоль оси y исключается), алгоритм является таким же для общего трехмерного пространства.
Обозначение f относится к вектору силы, приложенной к контактной поверхности, а обозначения m и n относятся к вектору перемещения синего маркера и вектору перемещения красного маркера в элементе телекамеры на приборах с зарядовой связью. Рассматриваются дискретные конечные точки (четыре точки на фиг.7 и 8). Как упоминалось выше, распределение вектора силы имеет три компоненты (x компоненту, y компоненту и z компоненту), но рассматриваются только две компоненты (x компонента и z компонента). В общем, получение изображения с помощью камеры означает проецирование трехмерного объекта на пиксельную плоскость двумерной плоскости таким образом, что на плоскость проецируется только перемещение маркеров в горизонтальном направлении (x компонента и y компонента). При этом перемещение маркера наблюдается только в x направлении.
Восемь компонент f=[fx(1), fx(2), fx(3), fx(4), fz(1), fz(2), fz(3), fz(4)] представляют собой распределение полученных векторов сил, где m=[m(1), m(2), m(3), m(4)] и n=[n(1), n(2), n(3), n(4)] являются векторами перемещения, которые измеряются. Вектора m и n представляют как Х. А именно X=[m(1), m(2), m(3), m(4), n(1), n(2), n(3), n(4)]. Вектора перемещения m и n, которые наблюдаются, когда единичную силу (величина равна 1) в направлении x прикладывают в точке 1, представляют как Mx(1).
А именно Mx(1)=[m(1), m(2), m(3), m(4), n(1), n(2), n(3), n(4)], когда f=[1,0,0,0,0,0,0,0]. Аналогично, вектор смещения каждого маркера, когда единичная сила в z-направлении приложена в точке 1, представляют как Mz(1), вектор перемещения каждого маркера, когда единичная сила в x-направлении приложена в точке 2 представляют как Mx(2) и т.д. В случае линейного гибкого корпуса, когда соотношение линейной суммы сохраняется между приложенными силами и деформациями (большинство гибких корпусов удовлетворяют этим характеристикам), векторы перемещения представляются как
X=Mx(1)×fx(1)+Mz(1)×fz(1)+Mx(2)×fx(2)+…+Mz(4)×fz(4),
где даны общие силы f=[fx(1), fx(2), fx(3), fx(4), fz(1), fz(2), fz(3), fz(4)]. Наоборот, тот факт, что векторы перемещения могут быть представлены, как упомянуто выше, означает, что суперпозиция сил сохраняется, следовательно, гибкий корпус является линейным гибким корпусом.
Когда уравнение представляется в матричной форме, X=H×f, где H=[Mx(1); Mx(2); …; Mz(4)]. H называется передаточной функцией, потому что H представляет собой отображение, которое преобразует силу f в деформацию x. Форма матрицы, записанной с элементами, является следующей:

где Hmx(x1,x2) представляет собой величину смещения в направлении x маркера m на определенной глубине с координатой x=x1 с единичной силой в направлении x, приложенной к поверхности в точке с координатой x=x2. Аналогично, Hnz(x1, x2) представляет величину смещения в направлении z маркера n на определенной глубине с координатой x=x1 с единичной силой в направлении z, приложенной к поверхности в точке с координатой x=x2.
Это простое перемножение матриц, где x соответствует матрице 1×8, Н соответствует квадратной матрице 8×8 и f содержит 1×8 компонент. Таким образом, f может быть получена при умножении наблюдаемой х на обратную матрицу Н. А именно f=inv(H)×Х (уравнение 1), где inv представляет собой обратную матрицу (обратную обобщенную матрицу).
Форма матрицы, записанной с элементами, является следующей:

Важный момент состоит в том, что количество наблюдаемых данных должно быть равно или больше количества неизвестных при определении неизвестных с использованием обратной матрицы, определяемой передаточной функцией. Для решения этой проблемы в настоящем изобретении используются два слоя различно окрашенных групп маркеров, чтобы увеличить число независимых наблюдаемых данных до восьми путем наблюдения перемещения каждого маркера в двух группах маркеров, расположенных в виде слоев.
В случае трехмерного пространства (где добавляется ось y) в точке вектор силы имеет три степени свободы, и вектор горизонтального перемещения маркеров имеет две степени свободы. Если число пробных точек равно четырем, количество неизвестных равно двенадцати, где f=[fx(1), fy(1), fz(1), fx(2), fy(2), fz(2), fx(3), fy(3), fz(3), fx(4), fy(4), fz(4)], в то время, как количество наблюдаемых векторов перемещения равно восьми и является несущественным, где m=[mx(1), my(1), mx(2), my(2), mx(3), my(3), mx(4), my(4)].
За счет использования двух слоев маркеров можно получить шестнадцать наблюдаемых данных путем наблюдения маркеров, расположенных в виде слоев, и определить двенадцать неизвестных. Из-за избыточности количества полученной информации может осуществляться устойчивая интерполяция. При использовании перечисленных выше алгоритмов векторы силы экстраполируют на основе изображения, созданного телекамерой на приборах с зарядовой связью. Даже при использовании других способов измерения настоящего изобретения, в которых применяют, например, другие типы конфигураций маркеров, способы измерения, по существу, остаются теми же самыми.
[D] Передаточная функция, используемая для восстановления распределения вектора силы
Ниже описан способ получения передаточной функции. В гибком корпусе, имеющем характеристическую форму (полубесконечный гибкий корпус) было найдено численное уравнение в качестве функции, определяющей силу, приложенную к поверхности, и внутреннюю деформацию, функция, при которой упомянутое выше уравнение, которое действует в микроскопической области, может выполняться в любых областях внутренней части гибкого корпуса. В этом случае матрица H может быть получена введением в аргумент функции координат разделенных поверхностей гибкого корпуса и координат внутренних маркеров.
Численное уравнение представляет собой функцию G, с помощью которой может быть получена внутренняя деформация на основе поверхностного напряжения в форме m(x2, y2)=G(f(x1), x2, y2), где f(x1) представляет собой поверхностное напряжение и m(x2, y2) представляет внутреннюю деформацию Например, когда сила приложена в 1 (фиг.7 и 8), смещение маркера 2 может быть получено согласно выражению m(2, y2)=G(f(1), 2, y2), где y2 представляет собой известную глубину маркера.
В зависимости от формы гибкого корпуса получают матрицу Н, использующую упомянутое выше уравнение, в предположении, что гибкий корпус имеет полубесконечную форму. Было определено, что поверхностное напряжение не может быть правильно получено, когда уравнение для полубесконечного гибкого корпуса применяют для произвольной искривленной поверхности, такой как полусферическая поверхность. Следовательно, необходимо связать поверхностное напряжение с внутренней деформацией любым другим способом.
Первый способ состоит в определении связи между поверхностным напряжением и внутренней деформацией с помощью численного моделирования. Путем разделения поверхности датчика на ячейки можно вычислить величину перемещения маркеров, когда единичную силу прикладывают к каждой ячейке в x-направлении, y-направлении и z-направлении, путем моделирования.
Второй способ состоит в реальном приложении силы к поверхности. Прикладывают силы F1, F2, F3, F4…, Fn, имеющие известную величину, к произвольной искривленной поверхности гибкого корпуса. Векторы перемещения (перемещения маркеров, вызванные каждой известной силой) M1, M2, M3, M4, …, Mn маркеров, относящиеся к каждой приложенной силе, измеряют и сохраняют. F1 представляет три вектора F1x, F1y, F1z, и векторы перемещения соответствующих маркеров получают как M1x, M1y, M1z, при приложении этих сил. Матрицу Н получают на основе сил, имеющих известную величину, и полученной информации (вектор перемещения). Второй способ будет объяснен подробно.
Во-первых, многочисленные пробные точки располагают дискретно на поверхности гибкого корпуса. В одном предпочтительном варианте реализации пробные точки располагают таким образом, чтобы покрыть всю площадь поверхности. В одном варианте реализации многочисленные дискретные пробные точки располагают (концентрическим образом на виде сверху) в соответствии с криволинейными координатами. В другом случае пробные точки размещают так, что создают сетчатую структуру на виде сверху.
В каждой пробной точке получают информацию, которая связывает силы, имеющие известную величину, приложенные в x-направлении, y-направлении и z-направлении, с соответствующими векторами перемещения маркеров, когда прикладывают силы. В одном предпочтительном способе силы, имеющие предварительно заданную величину, независимо прикладывают в каждой пробной точке в x-направлении, y-направлении и z-направлении, и каждый вектор перемещения маркеров измеряют и сохраняют. Ориентации векторов сил в x-направлении, y-направлении и z-направлении, приложенных в пробных точках, не ограничивают, поскольку произвольная сила, приложенная к поверхности, может быть представлена с помощью этих векторов сил.
Силы, приложенные в каждой пробной точке, имеют известную величину, и в одном предпочтительном аспекте силу постоянной величины, например 100 гс, прикладывают в пробной точке в x-направлении, y-направлении и z-направлении, соответственно, и измеряют векторы перемещения для каждого варианта. Не является необходимым, чтобы силы, приложенные в каждой пробной точке, имели одну и ту же величину, поскольку величина каждой силы известна. Вектор смещения маркеров может измеряться на основе сил, имеющих различные величины, и затем величина вектора смещения может быть нормирована.
Как упомянуто выше, матрица Н может быть получена путем моделирования или измерения, где матрица Н представляет собой передаточную функцию, которая связывает информацию о силе F с информацией М, относящейся к поведению маркера (информация о перемещении). Оптический тактильный датчик содержит устройство памяти и процессор. Получаемую матрицу Н сохраняют в устройстве памяти. Изображение маркера получают с помощью устройства для фотографирования, когда объект контактирует с прозрачным гибким корпусом, и произвольную силу прикладывают к поверхности датчика. Вектор перемещения маркера измеряют на основе полученного изображения маркера с помощью процессора. Измеренный вектор перемещения маркера является входным для матрицы Н и вычисляется с помощью процессора, таким образом давая на выходе вектор силы, которую прикладывают к поверхности гибкого корпуса.
[E] Способ сокращения времени расчетов
Если количество элементов матрицы Н увеличивается, времени для вычисления распределения силы на основе информации о перемещении становится больше. Это происходит из-за использования информации о перемещении для всех маркеров при получении силы, приложенной в конкретной точке. В действительности, в случае принятия первоначально описанного алгоритма матрица Н становится гигантской, и требуется время для матричной операции для уравнения 1. Приведем один пример: в случае сетки 100×100 существует 10000 точек наблюдения, это означает, что матрица Н становится гигантской матрицей 10000×10000. В случае поверхности датчика, разделенной на N×N элементов, так как количество точек наблюдения соответствует возведению N в квадрат, размер матрицы H становится равным произведению N, возведенного в квадрат, на N, возведенное в квадрат. Таким образом, время, в четыре раза большее N, требуется для матричной операции с уравнением 1. Это означает, что проблема является основной для датчика внешнего типа настоящего изобретения, который часто содержит поверхность большой площади. Соответственно, необходимо сократить время расчетов.
Согласно предложенному способу выделяют часть матрицы Н и используют ее. Как описано выше, соответствующее соотношение для силы, приложенной ко всем точкам сетки, и перемещения всех маркеров описывается в матрице Н. Однако в действительности возможно игнорировать поведение маркера при условии, что расстояние между точками приложения силы и маркером существенно. Если это делается (фиг.7 и 8) в предположении, что при расчетах f(1) можно использовать только с первого по второй маркеры, и при расчетах f(2) использовать только с первого по третий маркеры, можно сделать размер матрицы небольшим. Новая матрица в этом примере является следующей.
Исходное уравнение 1 f=inv(H)x является следующим:

Места в матрице с нулевыми значениями представляют собой точки, отделенные расстоянием, которые должны быть проигнорированы. Вычисление может выполняться с большей скоростью, потому что нет необходимости проводить для них расчеты. Это увеличение скорости обеспечивает ускоренное действие, поскольку размер сетки N становится больше, как описано выше.
Это эквивалентно использованию выделенной площади поверхности, содержащей место, на котором требуется получать вектора силы (фиг.10). В ситуации, показанной на чертеже, в двумерном изображении всей контактной поверхности устанавливается область вблизи от места, где требуется получать распределение вектора силы. Из-за того, что установлена область вблизи от точки, где требуется получить векторы силы, соседняя область не обязательно определяется на основе только расстояния в двумерном изображении. Расстояние между точками приложения силы и маркером представляет собой пространственное расстояние, и в аналогичных случаях, когда группы маркеров расположены в виде слоев внутри гибкого корпуса, могут быть варианты, когда требуется учитывать глубину, на которой расположен маркер.
В случае контактной поверхности, которая является произвольной искривленной поверхностью, вклад мест, отделенных расстоянием, не всегда является малым. Следовательно, предлагается другой способ сокращения времени расчетов. Прежде всего, передаточная функция (обратная матрица) получается путем реального измерения или моделирования. Способ получения этого типа передаточной функции уже был описан. Например, при рассмотрении элементов матрицы для передаточной функции на основе реального измерения, если отдельный элемент матрицы близок к нулю, маркер, соответствующий элементу, может считаться маркером, который можно проигнорировать для получения отдельного вектора силы. Возможно рассчитать вектор силы с частями, где отдельный элемент матрицы передаточной функции, который приближается к нулю, автоматически исключается из расчетов. Например, для элементов матрицы устанавливается порог, представляющий собой величину, до которой можно игнорировать восстановление вектора силы, и значения элементов матрицы, меньшие установленного порога, приравнивают к нулю.
Кроме того, будет описано улучшение способа сокращения расчетов. По отношению к точке выделенной отдельной области изображения это то же самое, что и для упомянутого выше способа сокращения расчетов. Упомянутый выше способ связан только с информацией внутри выделенной области, в то время как улучшенный способ подходит и для пробных точек вне выделенной области, для силы, которая вычисляется. По отношению к перемещению маркера обрабатывают только информацию внутри выделенной области. Пробные точки являются точками для принятия во внимание действия силы со стороны внешней области. Т.е. на перемещение маркера внутри выделенной области можно воздействовать до определенной степени за счет силы, приложенной вне выделенной области. Во время восстановления векторов силы на основе информации о перемещении маркеров внутри выделенной области путем расчета силы, действующей не только внутри выделенной области, но также силы, действующей вне выделенной области, восстанавливают силу, действующую внутри выделенной области, при этом принимают во внимание силу, действующую вне выделенной области.
Пробные точки силы вне области размещают разреженно на расстоянии от выделенной области. Это происходит потому, что считают, что представление возможно с меньшим количеством пробных точек, так как действие становится слабее с увеличением расстояния отделения от области. На фиг.11 малая область, соответствующая пробным точкам, состоящая из 5×5 точек, расположена в изображении тактильной части датчика. Пробные точки размещают плотно внутри малой области. Пробные точки для силы также располагают вне малой области. Пробные точки для силы вне малой области располагают более разреженно на расстоянии от малой области. На участках, близких к малой области, пробные точки располагают плотно, с такой же плотностью, как внутри малой области, и, поскольку расстояние от малой области увеличивается, пробные точки располагают более разреженно.
Затем вычисляют векторы силы для пробных точек, расположенных внутри и вне малой области, на основе информации о перемещении маркеров внутри малой области. Среди вычисленных векторов силы только результаты по меньшей мере для некоторых векторов силы внутри малой области принимают и сохраняют как результаты окончательных вычислений. На фиг.11 векторы силы для пробных точек, расположенные в виде матрицы 3×3 внутри малой области 5×5, сохраняют как результаты окончательных вычислений. Пробные точки вне малой области и пробные точки внутри малой области, которые не принимаются во внимание, отбрасывают. Выделенную малую область затем последовательно сдвигают по мере получения векторов силы для области, таким образом получают распределение вектора силы для всей области измерений датчика. На фиг.11 используют векторы силы для части пробных точек малой области, но также можно использовать векторы силы для всех пробных точек внутри малой области. На фиг.11 используют векторы силы для множества пробных точек для части малой области, но также можно использовать только векторы силы для одной пробной точки внутри малой области. На фиг.11 показана малая область 5×5 точек, но размер выделенной области неограничен. Используя этот способ, усовершенствованный по сравнению с описанным выше способом сокращения вычислений, можно увеличить количество расчетов, но существенно сократить время расчетов по сравнению с принятым ранее способом с увеличением скорости расчетов.
Описание будет дано для усовершенствованного способа со ссылкой на фиг.12-15. На фиг.12 для упрощения описания усовершенствованного способа количество точек для маркеров увеличено по сравнению с тем, которое показано на фиг.7 и 8. Благодаря увеличенному количеству точек для маркеров, увеличено число элементов в уравнениях, поэтому на фиг.13 показаны только перемещения вдоль направлений x, z для маркера n, соответствующего силе для одной отдельной точки. Это эквивалентно ситуации, когда выделяют только части, соответствующие элементам Imx(1,1), Imx(2,1), Imx(3,1), Imx(4,1), Imx(1,2), Imx(2,2), Imx(3,2) и Imx(4,2) матрицы inv(H) в уравнении 3, и количество точек для маркеров увеличивают.
В способе увеличения скорости перед усовершенствованием используют только информацию о перемещении маркеров, которая имеется вблизи точек, к которым прикладывается полученная сила, и используют только информацию о перемещении для маркеров с m10 по m14 (фиг.14). В этом отношении на фиг.15 показан способ увеличения скорости после усовершенствования. Т.е., не только F8, но также F2, F5, F9, F11 и F14 располагают как выборочные точки силы. В вычисленных с помощью компьютера векторах используются только векторы силы для Fx8 и Fz8.
[F] Другие варианты реализации группы маркеров
Что касается тактильной части оптического тактильного датчика, в предпочтительных вариантах реализации множество групп маркеров размещают в прозрачном гибком корпусе, причем каждая группа маркеров содержит множество маркеров, причем маркеры, составляющие различные группы маркеров, имеют различную окраску в каждой группе, а группы маркеров имеют различное пространственное расположение. Примером такого различного пространственного расположения служит множество групп маркеров, расположенных в виде слоев внутри гибкого корпуса. Примером маркеров, расположенных в виде слоев, маркеров, составляющих группы маркеров, являются микроскопические сферические частицы. Сферические маркеры, составляющие группу маркеров для каждого слоя, имеют различную окраску. Другим примером различного пространственного расположения служит множество групп маркеров, расположенных так, что они пересекаются друг с другом. Еще одним примером различного пространственного расположения служит вариант, когда каждая группа маркеров представляет собой плоскую группу, содержащую множество плоскостей, проходящих в одном направлении, эти направления и окраска различны для каждой группы маркеров. Форма окрашенных маркеров неограничена, и предпочтительно может быть сферической, цилиндрической, колонновидной, полосовидной или плоской.
Хотя настоящее изобретение описывается на основе сферических маркеров в качестве предпочтительного варианта, форма и/или расположение маркеров не ограничиваются упомянутыми выше. Ниже описаны другие формы и расположения маркеров (фиг.16-19) (см., например, WO02/18893). Кроме того, форма и/или расположение маркеров не ограничиваются вариантами настоящей заявки.
На фиг.16 показаны окрашенные маркеры, составленные из очень тонких цилиндров или колонн, имеющих микроскопические поперечные сечения. Две группы маркеров расположены на разной глубине от поверхности 2. Группа маркеров, составленная из экстремально тонких синих цилиндрических маркеров 40, и другая группа маркеров, составленная из очень тонких красных цилиндрических маркеров 30, расположены в виде слоев вдоль поверхности 2 на различной глубине от поверхности. Маркеры расположены вдоль воображаемых линий, соединяющих объект, вступающий в контакт с гибким корпусом и камерой. Расположение каждого маркера не ограничивается чертежом, можно создать три или более группы маркеров, каждая из которых имеет различную окраску.
На фиг.17 сверху наклонные плоские маркеры 300, 400 расположены в гибком корпусе 1 ступенчатым образом. В одном предпочтительном аспекте части (поверхность раздела ступенчатой формы) гибкого корпуса 1 составляют маркеры 300, 400. В другом аспекте в гибком корпусе 1 могут размещаться отдельные плоские маркеры. Поверхность раздела может быть разделена на две группы поверхностей, все поверхности в группе имеют одно и то же направление. Поверхности каждой группы имеют один цвет (одна граница раздела 300 является синей, и другая граница раздела 400 является красной). Можно получить наблюдаемые величины, содержащие вертикальные и горизонтальные компоненты векторов силы в конкретной точке в качестве информации путем наблюдения интенсивности двух цветов в этой точке. При считывании наблюдаемой интенсивности возможно восстановить поверхностное распределение векторов сил.
Поверхностные маркеры, имеющие два цвета, показаны на фиг.17 сверху, но могут быть использованы поверхностные маркеры, имеющие три цвета. Как показано на фиг.17 снизу, используя так называемую пирамиду, получающуюся, когда микроскопические кубы собраны на нижней поверхности, если три группы поверхностей, обращенных в одном и том же направлении, соответственно выполнены так, что имеют один и тот же цвет (например, красный, зеленый или синий), можно получать степени свободы для силы, действующей в горизонтальном направлении на контактной поверхности как отношения интенсивностей для трех цветов, и силы, действующей в вертикальном направлении, используя полную интенсивность трех цветов.
На фиг.18 две группы маркеров (группа маркеров, содержащая множество тонких красных полос, расположенных в ряд, и группа маркеров, содержащая множество тонких синих полос, расположенных в ряд) выравнивают таким образом, что соответствующие маркеры ортогональны друг другу, но соотношение пространственного расположения между множеством групп маркеров неограничено. Также возможно, чтобы две стороны полос, составляющих маркер, имели разные цвета. На фиг.18 части сторон полосовых маркеров расположены вдоль направления наблюдения, но части сторон полосовых маркеров могут быть наклонены по отношению к направлению наблюдения.
На фиг.19 показана чувствительная часть, имеющая множество плоских маркеров. Плоские маркеры обычно скрыты скрывающими маркерами, и каждый плоский маркер разделен на множество частей, имеющих различные цвета для каждой части, при этом разделенные части, имеющие одинаковый цвет, составляют каждую группу маркеров. Плоские маркеры и скрывающие маркеры располагают в гибком корпусе и отделяют в пространстве друг от друга, так что маркеры скрыты скрывающими маркерами и не наблюдаются в состоянии, когда внешняя сила не действует на прозрачный гибкий корпус. Когда возникает деформация сдвига, положения скрывающих маркеров 6 и окрашенных маркеров 20 смещаются, давая цвет. Для датчика на фиг.19 маркеры имеют три цвета: красный, зеленый, синий, при этом можно определить направление деформации на основе полученного цвета.
Промышленная применимость
Настоящее изобретение может широко применяться для тактильного датчика. Предпочтительно, использование датчика на поверхности сиденья стула обеспечивает измерение распределения давления, приложенного к бедренной части человека, сидящего на стуле. Также использование датчика на кровати позволяет измерить распределение давления, которое создает человек, лежащий на кровати, и использование датчика, установленного на поверхности пола, позволяет замерять возмущение при ходьбе и гравитационное возмущение.
Реферат
Настоящее изобретение относится к оптическому тактильному датчику, а именно к тактильному датчику, используемому для получения сил, приложенных к относительно большей площади. Техническим результатом заявленного изобретения является получение информации и формирование целого изображения с помощью маркеров, позволяющего измерять распределение силы на большой площади. Оптический тактильный датчик содержит тактильную часть, содержащую прозрачный гибкий корпус и множество маркеров, расположенных в корпусе, и множество устройств формирования изображения для получения изображения маркера путем фотографирования поведения маркеров, когда объект контактирует с тактильной поверхностью прозрачного гибкого корпуса. Способ использования оптического тактильного датчика содержит этапы получения частичного изображения путем фотографирования частичных областей А, В, С и D прозрачного гибкого корпуса с использованием множества устройств формирования изображения так, что каждое устройство формирования изображения имеет область перекрытия изображений, и объединения частичных изображений, полученных с помощью каждого устройства формирования изображения, так что идентичные маркеры в области перекрытия изображений соответствуют друг другу. 5 н. и 12 з.п. ф-лы, 19 ил.
Формула
средство формирования изображения для получения изображения маркера путем фотографирования поведения маркеров, когда объект контактирует с чувствительной поверхностью прозрачного гибкого корпуса, отличающийся тем, что средство формирования изображения содержит множество устройств формирования изображения, каждое из которых установлено так, что каждая из множества областей формирования изображения, которая записывается с использованием каждого соответствующего устройства формирования изображения, имеет область перекрытия изображения с частичным перекрытием, при этом оптический тактильный датчик дополнительно содержит средство для объединения каждого из изображений маркеров, полученных с использованием множества устройств формирования изображения, причем средство объединения изображения предназначено для объединения области формирования изображения так, что идентичные маркеры в областях перекрытия изображения соответствуют друг другу, обеспечивая формирование объединенного изображения.
используют множество устройств формирования изображения в качестве средств формирования изображения и получают частичное изображение маркера путем фотографирования части участка прозрачного гибкого корпуса с использованием множества устройств формирования изображения так, что каждое устройство формирования изображения имеет область перекрытия изображения, формируют объединенное изображение маркера путем объединения частичных изображений маркера, полученных с использованием средств формирования изображения так, что идентичные маркеры в областях перекрытия изображения соответствуют друг другу.
получают частичное изображение путем фотографирования части участка прозрачного гибкого корпуса с использованием множества устройств формирования изображения, так что каждое устройство формирования изображения имеет область перекрытия изображения, объединяют отдельные изображения, полученные при использовании средств формирования изображения так, что идентичные маркеры в областях перекрытия изображения соответствуют друг другу.
получают информацию, относящуюся к поведению маркера на основе изображения маркера, причем указанная информация содержит больше величин, чем число полученных векторов сил,
получают векторы силы в качестве выходных сигналов, для чего вводят полученную информацию, касающуюся поведения маркера, в передаточную функцию,
при этом полученные векторы силы объединяют опущенную информацию о векторах силы, относящуюся к поведению маркера, которая дает незначительный вклад в вычисление вектора силы.
получают векторы силы, действующие на пробные точки в и вокруг заданной точки, используя информацию, относящуюся к поведению маркера вблизи заданной точки,
принимают только те векторы силы, которые действуют в заданной точке при вычисленных векторах силы.
получают информацию о поведении маркера на основе изображения маркера, причем указанная информация содержит больше величин, чем число полученных векторов силы,
устанавливают малую область конкретного размера в изображении маркера и располагают множество пробных точек вектора силы внутри и вне малой области,
вычисляют векторы силы, действующие на пробные точки, путем передачи информации о маркере внутри малой области к передаточной функции,
принимают векторы силы, действующие по меньшей мере на некоторые пробные точки множества пробных точек, расположенных внутри малой области.
Комментарии