Способ измерения контактного усилия и устройство измерения контактного усилия - RU2519589C1
Код документа: RU2519589C1
Чертежи






Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к способу измерения контактного усилия и устройству измерения контактного усилия.
УРОВЕНЬ ТЕХНИКИ
[0002] В системе электрического железнодорожного состава устройство электрического токоприемника, смонтированное на крыше железнодорожного состава, такое как пантограф, и воздушный провод контактируют друг с другом, так что подается электроэнергия. Контактное усилие формируется между пантографом и воздушным проводом. В случае если контактное усилие существенно изменяется, пантограф будет отходить от воздушного провода. Явление разряда, называемое "дугой", возникает между разъединенным пантографом и воздушным проводом. Если такая дуга возникает, воздушный провод изнашивается. Напротив, в случае, если контактное усилие является слишком большим, воздушный провод также изнашивается. Таким образом, предпочтительно, чтобы контактное усилие не изменялось существенным образом.
[0003] Чтобы рассматривать способ предотвращения разъединения воздушного провода и диагностики истирания относительно воздушного провода, предполагается необходимость измерять значение контактного усилия.
Патентный документ 1, как описано ниже, раскрывает, что заранее измеряется амплитудно-частотная характеристика пантографа в зависимости от изменения контактного усилия, и контактное усилие вычисляется посредством сверточного интегрирования с характеристикой временных рядов движущегося пантографа и амплитудо-частотной характеристикой.
[0004] Патентный документ 2, как описано ниже, раскрывает способ измерения контактного усилия, в котором датчики, такие как акселерометр, тензодатчик и т.д., размещаются в пантографе. Контактное усилие пантографа получается посредством измерения силы реакции пружины и силы инерции пантографа. Патентный документ 3, как описано ниже, раскрывает способ измерения контактного усилия пантографа, в котором две пары верхних и нижних источников освещения, к примеру светодиодных, предоставляются в пружинной части пантографа. Контактное усилие пантографа получается посредством обработки изображений источников света, захватываемых посредством CCD-камеры, и определяется относительное смещение пружинной части. Таким образом, посредством определения упругости пружины может быть получено контактное усилие пантографа.
[0005] Патентный документ 4 раскрывает способ измерения контактного усилия пантографа, в котором камеры линейных датчиков (в дальнейшем в этом документе они называются "линейными датчиками") предоставляются в положении выше части крыши пантографа, и захватываются изображения пружинной части пантографа. Посредством определения относительного смещения посредством обработки захватываемых изображений определяется упругость пружины. Таким образом, получается контактное усилие пантографа. Тем не менее, патентный документ 4 не раскрывает подробно то, как обрабатываются захватываемые изображения.
[0006] Патентный документ 5 раскрывает способ измерения смещения пантографа, в котором маркер в полоску, некоторые части которого являются областями с высокой светоотражательной способностью, а оставшиеся части являются областями с низкой отражательной способностью, монтируется в пантографе, и линейные датчики размещаются в части крыши корпуса железнодорожного состава, чтобы фотографировать изображения маркера вдоль вертикального направления. Посредством определения положения маркера и сопоставления с шаблоном определяется смещение пантографа.
[0007] В патентном документе 5 изображения временных рядов, записываемые в единицу времени посредством сканирования вдоль вертикального направления, приблизительно сравниваются с шаблоном маркера, соответствующим рисунку в полоску, чтобы определять, совпадают или нет изображения с шаблоном маркера или являются аналогичными шаблону маркера. Таким образом, даже если изображения записываются при солнечном свете, подобные шаблону изображения могут отличаться от других. Даже если яркость динамически изменяется в момент фотосъемки, например, в случае, если железнодорожный состав въезжает/выезжает из туннеля, могут быть получены изображения временных рядов. В соответствии со способом, раскрытым в патентном документе 5, как описано ниже, могут быть определены относительное смещение пантографа и упругость пружины.
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
Патентные документы
[0008] Патентный документ 1. Не прошедшая экспертизу патентная публикация (Япония) № 11-194059.
Патентный документ 2. Не прошедшая экспертизу патентная публикация (Япония) № 2004-301591.
Патентный документ 3. Не прошедшая экспертизу патентная публикация (Япония) № 2001-235310.
Патентный документ 4. Не прошедшая экспертизу патентная публикация (Япония) № 2008-185457.
Патентный документ 5. Не прошедшая экспертизу патентная публикация (Япония) № 2008-104312.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ЗАДАЧА ДЛЯ РЕШЕНИЯ ИЗОБРЕТЕНИЕМ
[0009] Тем не менее, например, в случае размещения датчиков на пантографе в способе, раскрытом в патентном документе 2, некоторые специальные процессы необходимы для предоставления электропроводки и отверстий, через которые пропускаются провода. Дополнительно, в случае размещения светодиода, раскрытого в патентном документе, пантографу необходимо пройти некоторые этапы для монтажа светодиода и аккумуляторного источника для светодиода.
[0010] В способе измерения контактного усилия, раскрытом в патентном документе 4, контактное усилие измеряется посредством обработки записанных изображений без контактирования с пантографом. Необязательно обрабатывать пантограф. Таким образом, этот способ может быть широко применимым. Тем не менее, в этом способе необходимо определять смещения верхней части и нижней части пружин с тем, чтобы вычислять упругость пружин, необходимо записывать маркеры, присоединяемые к верхним и нижним частям пружин, посредством камер линейных датчиков.
[0011] В способе, раскрытом в патентных документах 3 и 4, верхняя и нижняя части пружин могут наблюдаться из внешней области. В случае традиционного пантографа, верхняя и нижняя часть пружин которого может быть записана посредством камер линейных датчиков, отсутствует проблема в применении этих способов. Тем не менее, в случае пантографа, кораблевидный корпус и пружина которого не могут быть непосредственно записаны, верхняя и нижняя часть пружины не могут наблюдаться из внешней области. В случае способов, раскрытых в патентных документах 3 и 4, имеется проблема в неспособности измерения контактного усилия пантографа, если кораблевидный корпус и пружины не могут быть непосредственно записаны.
[0012] После рассмотрения вышеуказанных недостатков, настоящее изобретение предоставляет способ измерения контактного усилия для измерения контактного усилия пантографа посредством обработки изображений в случае пантографа, кораблевидный корпус и пружина которого не могут быть непосредственно записаны, и устройство измерения контактного усилия.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧИ
[0013] Чтобы разрешать вышеуказанные недостатки, способ измерения контактного усилия согласно первому варианту осуществления изобретения является способом измерения контактного усилия пантографа, в котором кораблевидный корпус верхней части токоприемника поддерживается посредством опорного элемента кораблевидного корпуса через множество пружин, при этом способ измерения контактного усилия отличается тем, что он содержит этап для записи изображений пантографа; этап подразумевания виртуальной комбинированной пружины в центральной части пантографа вдоль направления ширины посредством комбинирования множества пружин, вычисления относительного смещения между положением в центральной части пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, и опорному элементу кораблевидного корпуса, и вычисления упругости виртуальной комбинированной пружины посредством определения разности между относительным смещением и естественной длиной виртуальной комбинированной пружины, чтобы определять силу реакции пружины посредством умножения упругости на коэффициент жесткости виртуальной комбинированной пружины; этап для выполнения операций с дифференциалом второго порядка относительно смещения в положении, соответствующем кораблевидному корпусу, чтобы вычислять ускорение пантографа в соответствии с изображениями, и вычисления силы инерции посредством умножения ускорения на эквивалентную массу пантографа; этап для определения подъемной силы на основе изображений и данных скорости фактически движущегося железнодорожного состава, которые синхронизированы во времени; и этап для измерения контактного усилия посредством суммирования подъемной силы, силы инерции и подъемной силы.
[0014] Чтобы разрешать вышеуказанные недостатки, способ измерения контактного усилия согласно второму варианту осуществления изобретения отличается тем, что он содержит этап для определения положений маркеров, при этом один маркер размещается в центральной части пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, два других маркера размещаются на обеих сторонах пантографа, каждый маркер размещается на одной стороне пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, и другой один маркер размещается на кораблевидной опоре; этап для определения положений маркеров, отличающийся тем, что он включает в себя этап для определения положений трех маркеров, размещаемых в пантографе, соответствующем кораблевидному корпусу, и положения маркера, размещаемого на опоре кораблевидного корпуса, посредством обработки изображений в способе измерения контактного усилия согласно первому варианту осуществления изобретения.
[0015] Чтобы разрешать вышеуказанные недостатки, способ измерения контактного усилия согласно третьему варианту осуществления изобретения отличается тем, что он содержит этап для определения положений маркеров, при этом два маркера размещаются на обеих сторонах пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, каждый маркер размещается на одной стороне пантографа и один другой маркер размещается на кораблевидной опоре; этап для определения положений маркеров, отличающийся тем, что он включает в себя этап для определения положений двух маркеров, размещаемых на обеих сторонах пантографа, соответствующих кораблевидному корпусу, и положения другого маркера, размещаемого на опоре кораблевидного корпуса, посредством обработки изображений в способе измерения контактного усилия согласно первому варианту осуществления изобретения.
[0016] Чтобы разрешать вышеуказанные недостатки, способ измерения контактного усилия согласно четвертому варианту осуществления изобретения содержит этап для определения положений маркеров в способе измерения контактного усилия согласно первому варианту осуществления изобретения, при этом один маркер размещается в центральной части пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, другой маркер размещается на одной из обеих сторон пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, и еще один другой маркер размещается на кораблевидной опоре, при этом этап для определения положений маркеров отличается тем, что он включает в себя этап для определения положений двух маркеров, размещаемых в пантографе, соответствующем кораблевидному корпусу, и положения маркера, размещаемого на кораблевидной опоре, при этом виртуальный маркер считается размещенным в точке, линейно спрогнозированной в соответствии с положением маркера, размещаемого в центральной части пантографа, соответствующей кораблевидному корпусу, и маркера, размещаемого на одной из обеих сторон пантографа вдоль направления ширины, соответствующего кораблевидному корпусу.
[0017] Чтобы разрешать вышеуказанные недостатки, устройство измерения контактного усилия согласно пятому варианту осуществления изобретения является устройством измерения контактного усилия для измерения контактного усилия пантографа, в котором кораблевидный корпус верхней части токоприемника поддерживается посредством опорного элемента кораблевидного корпуса через множество пружин, при этом устройство измерения контактного усилия отличается тем, что оно содержит средство записи для записи изображений пантографа; и средство измерения для измерения контактного усилия пантографа, в котором виртуальная комбинированная пружина считается размещенной в центральной части пантографа вдоль направления ширины посредством комбинирования множества пружин, относительное смещение вычисляется в соответствии с центральной частью пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, и кораблевидной опорой посредством обработки изображений, разности между относительным смещением и естественной длиной виртуальной комбинированной пружины с тем, чтобы вычислять упругость виртуальной комбинированной пружины, сила реакции пружины определяется посредством умножения упругости на коэффициент жесткости виртуальной комбинированной пружины, ускорение пантографа определяется посредством дифференцирования смещения кораблевидного корпуса посредством обработки изображений, сила инерции определяется посредством умножения ускорения на эквивалентную массу пантографа, подъемная сила, прикладываемая к пантографу, определяется посредством обработки изображений и синхронизированных данных фактической скорости движения железнодорожного состава, и средство измерения определяет контактное усиление посредством суммирования силы реакции пружины, силы инерции и подъемной силы.
[0018] Чтобы разрешать вышеуказанные недостатки, устройство измерения контактного усилия согласно шестому варианту осуществления изобретения отличается тем, что один маркер размещается в центральной части пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, два других маркера размещаются на обеих сторонах пантографа, каждый маркер размещается на одной стороне пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, и другой один маркер размещается на кораблевидной опоре, средство измерения определяет положения трех маркеров, размещаемых в пантографе, соответствующем кораблевидному корпусу, и положения маркера, размещаемого на опоре кораблевидного корпуса, посредством обработки изображений в устройстве измерения контактного усилия согласно пятому варианту осуществления изобретения.
[0019] Чтобы разрешать вышеуказанные недостатки, устройство измерения контактного усилия согласно седьмому варианту осуществления изобретения отличается тем, что два маркера размещаются на обеих сторонах пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, каждый маркер размещается на одной стороне пантографа, и один другой маркер размещается на кораблевидной опоре, средство измерения определяет положения двух маркеров, размещаемых на обеих сторонах пантографа, соответствующих кораблевидному корпусу, и положение другого маркера, размещаемого на опоре кораблевидного корпуса, посредством обработки изображений в устройстве измерения контактного усилия согласно пятому варианту осуществления изобретения.
[0020] Чтобы разрешать вышеуказанные недостатки, устройство измерения контактного усилия согласно восьмому варианту осуществления изобретения отличается тем, что один маркер размещается в центральной части пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, другой маркер размещается на одной из обеих сторон пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, и еще один другой маркер размещается на кораблевидной опоре, средство измерения определяет положения двух маркеров, размещаемых в пантографе, соответствующем кораблевидному корпусу, и положение маркера, размещаемого на кораблевидной опоре, при этом виртуальный маркер считается размещенным в точке, линейно спрогнозированной в соответствии с положением маркера, размещаемого в центральной части пантографа, соответствующей кораблевидному корпусу, и маркера, размещаемого на одной из обеих сторон пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, в устройстве измерения контактного усилия согласно пятому варианту осуществления изобретения.
ПРЕИМУЩЕСТВО ИЗОБРЕТЕНИЯ
[0021] Согласно настоящему изобретению, даже если кораблевидный корпус и пружины пантографа не могут быть непосредственно сфотографированы или записаны, способ измерения контактного усилия и устройство измерения контактного усилия могут определять контактное усиление пантографа посредством обработки сфотографированных или записанных изображений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0022] Фиг.1 показывает упрощенную схему конструкции устройства измерения контактного усилия согласно первому варианту осуществления настоящего изобретения.
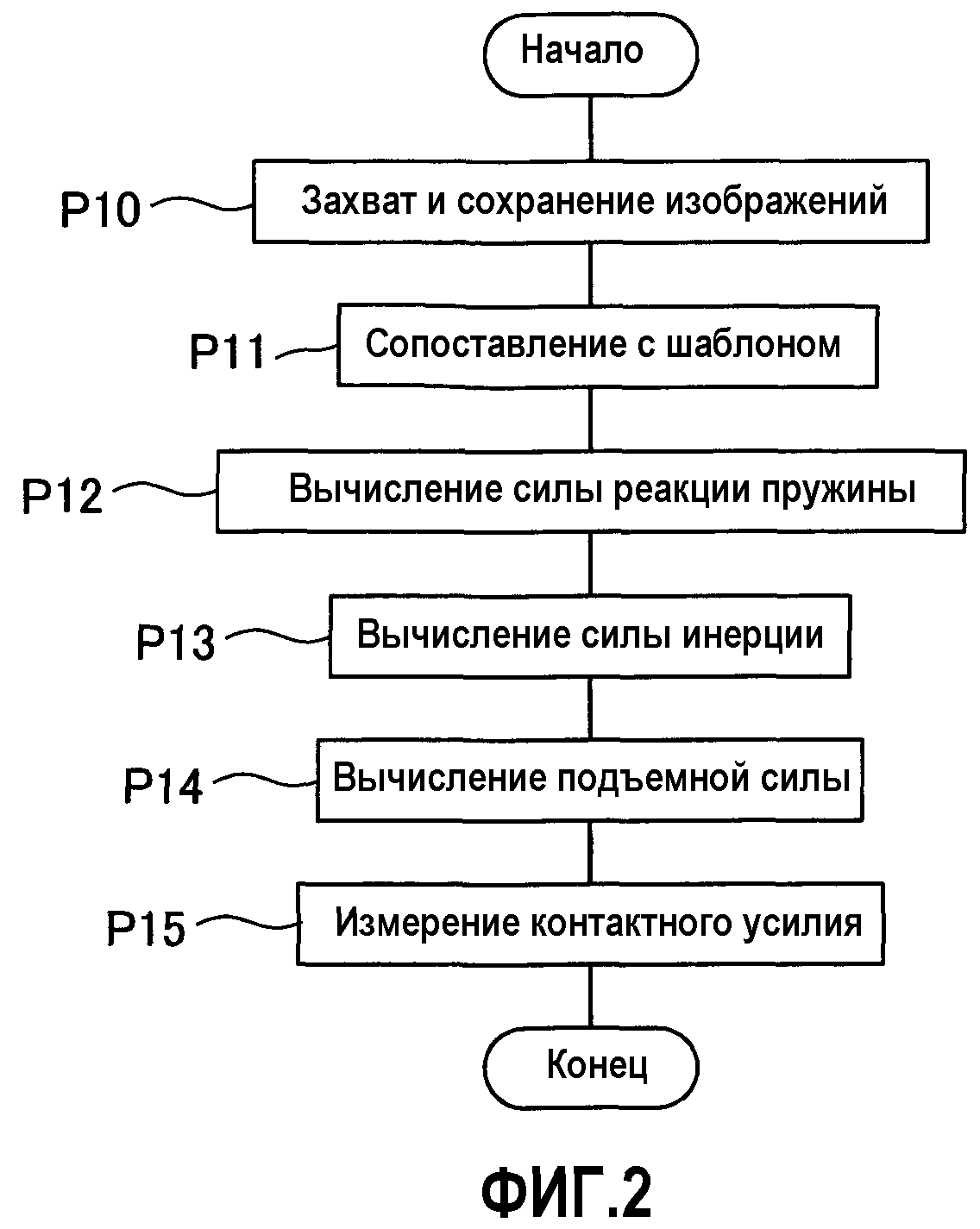
Фиг.2 является блок-схемой последовательности операций для демонстрации процессов способа измерения контактного усилия согласно первому варианту осуществления настоящего изобретения.
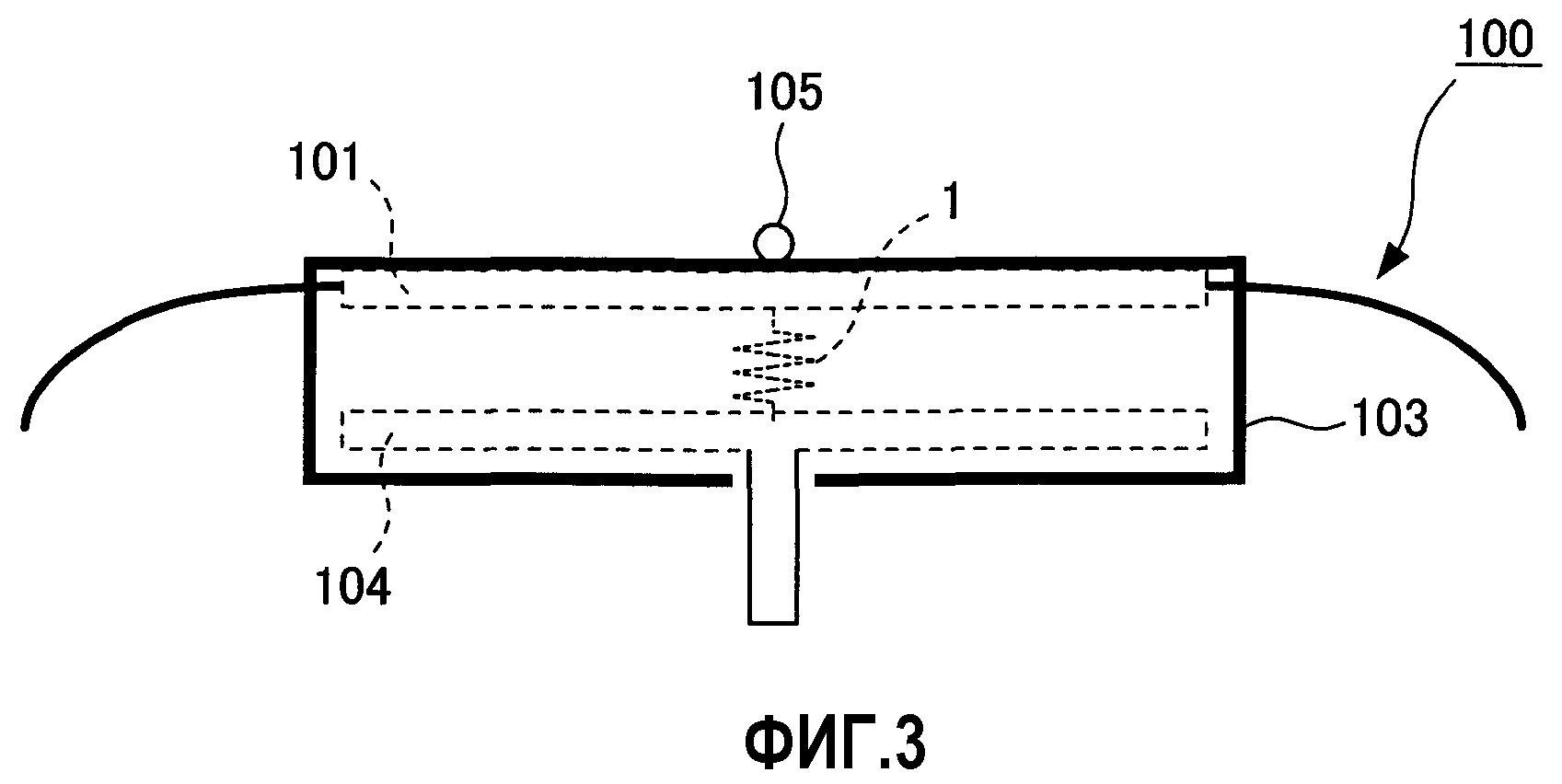
Фиг.3 показывает упрощенную схему пружины, виртуально комбинированной в первом варианте осуществления.
Фиг.4 показывает упрощенную схему для демонстрации того, где находятся маркеры согласно первому варианту осуществления.
Фиг.5 показывает упрощенную схему конструкции устройства измерения контактного усилия согласно второму варианту осуществления настоящего изобретения.
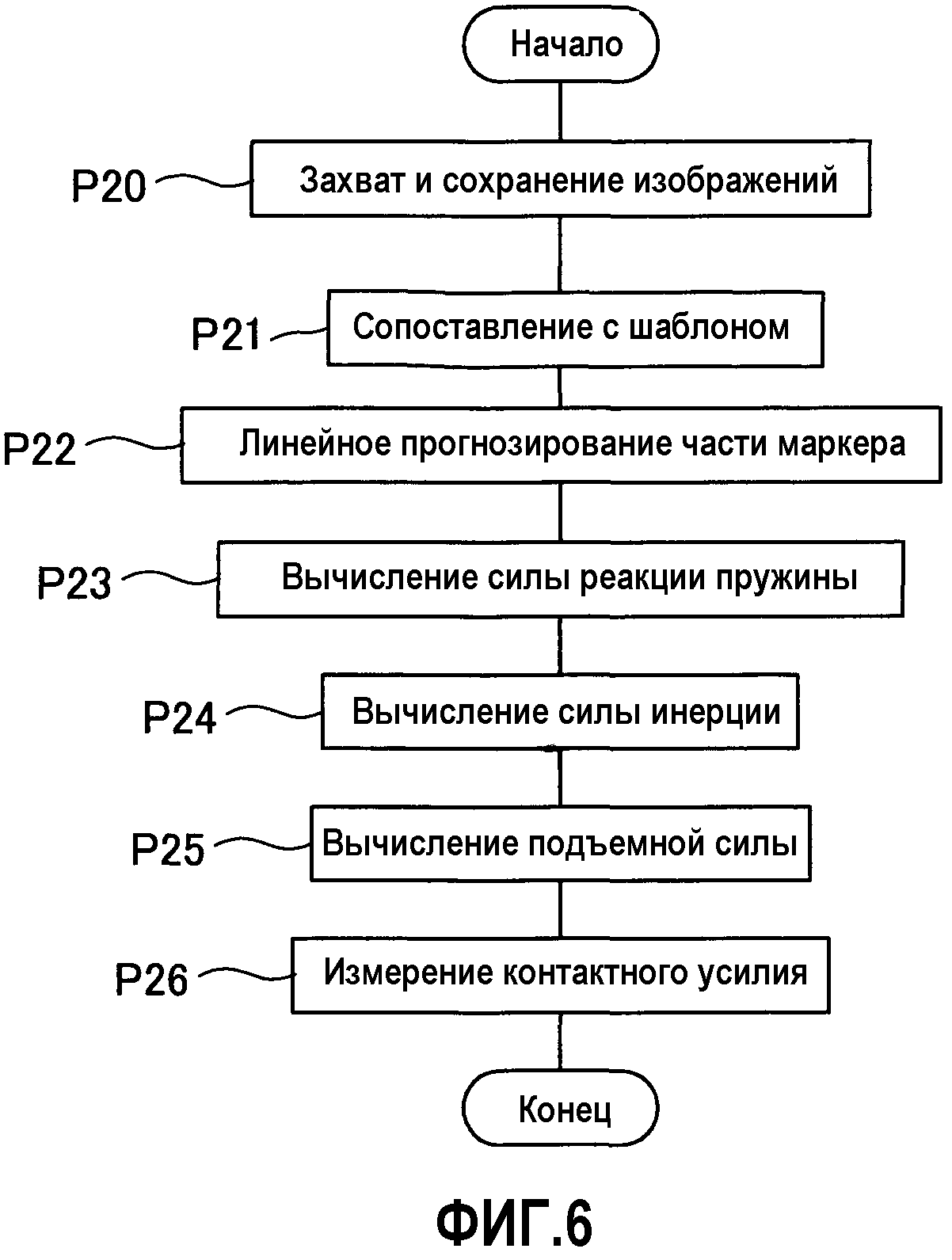
Фиг. 6 является блок-схемой последовательности операций для демонстрации процесса способа измерения контактного усилия согласно второму варианту осуществления настоящего изобретения.
Фиг.7 показывает пример способа для уменьшения числа оснований линейных датчиков посредством линейного прогнозирования положений маркеров согласно второму варианту осуществления.
Фиг.8 показывает упрощенную схему примера относительного смещения посредством устройства измерения контактного усилия согласно третьему варианту осуществления настоящего изобретения.
Фиг.9 является упрощенной схемой для демонстрации примера того, как кораблевидный корпус изгибается посредством упругой вибрации в устройстве измерения контактного усилия согласно третьему варианту осуществления.
Фиг.10 показывает упрощенную схему примера, в котором кораблевидный корпус и пружинная часть пантографа могут быть непосредственно сфотографированы.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0023] Варианты осуществления для того, чтобы осуществлять на практике способ измерения контактного усилия согласно настоящему изобретению, описываются со ссылкой на прилагаемые чертежи.
Вариант 1 осуществления
[0024] Описываются способ измерения контактного усилия и устройство измерения контактного усилия согласно первому варианту осуществления настоящего изобретения. В способе измерения контактного усилия и устройстве измерения контактного усилия согласно первому варианту осуществления, даже если верхняя часть токоприемника, имеющая кораблевидный корпус и пружинный элемент пантографа, не может быть непосредственно сфотографирована, настоящий вариант осуществления отличается тем, что контактное усилие пантографа может измеряться посредством способа бесконтактного измерения с помощью наблюдения за относительным смещением в центральной части пантографа и ускорением в трех точках.
[0025] Фиг.10 показывает упрощенную схему случая, в котором кораблевидная верхняя часть токоприемника и множество пружин 102 пантографа не могут быть непосредственно сфотографированы. Как показано на фиг.10, кораблевидный корпус 101 и пружинная часть 102 пантографа 100 защищаются посредством крышки 103. Согласно конструкции верхний конец кораблевидного корпуса 101 и верхний конец крышки 103 соединены между собой. Если какая-либо сила прикладывается на верхнем конце крышки 103, кораблевидный корпус 101 связывается с крышкой 103, так что кораблевидный корпус 101 и крышка 103 смещаются.
[0026] Тем не менее, опорный элемент 104 верхней части токоприемника не соединяется непосредственно с крышкой 103. Опорный элемент не перемещается плавно относительно смещения крышки 103. Следовательно, даже если маркер просто приклеен в положении поверхности крышки 103 за пределами положения, в котором находится пружинный элемент 102, маркер также смещается вместе с крышкой 13. Упругость пружинного элемента 102 не может измеряться.
[0027] Следовательно, в способе измерения контактного усилия согласно варианту осуществления, как показано на фиг.3, правая боковая и левая боковая пружины 102 виртуально комбинируются таким образом, что комбинированная пружина 1 считается расположенной в центре кораблевидного корпуса 101 вдоль направления ширины. Как показано на фиг.4, верхний центральный маркер 2C монтируется на верхней центральной части крышки 103 (соответствующей кораблевидному корпусу 101). На обеих сторонах крышки 103 вдоль направления ширины монтируются левый боковой верхний маркер 2L и правый боковой верхний маркер 2R, соответственно. Нижний маркер монтируется на нижней центральной части крышки 103, соответствующей элементу 104 кораблевидной опоры.
[0028] Относительное смещение между верхней центральной частью крышки 103 (соответствующей кораблевидному корпусу 1) и центральной частью опорного элемента 104 кораблевидного корпуса вычисляется, чтобы вычислять упругость виртуальной комбинированной пружины 1. В данном документе, как показано посредством стрелки D на фиг.4, относительное смещение указывает позиционный зазор между положением верхнего центрального маркера 2C и нижнего маркера 3.
[0029] Посредством вычисления разности между смещением виртуальной комбинированной пружины 1 без силы упругости (естественная длина) и определенным относительным смещением может быть определена упругость виртуальной комбинированной пружины 1. Сила реакции пружины может быть определена посредством умножения коэффициента жесткости комбинированной пружины на определенную упругость виртуальной комбинированной пружины 1.
[0030] В настоящем варианте осуществления, хотя пантограф 100, в котором кораблевидный корпус 101 поддерживается посредством двух левой и правой пружин 102, пантограф, в котором кораблевидный корпус 101 поддерживается посредством пружин 102, которых больше чем две пружины, также является применимым для того, чтобы вычислять упругость виртуальной комбинированной пружины 1.
[0031] В настоящем варианте осуществления, хотя кораблевидный корпус 101 и пружинная часть 102 не могут быть непосредственно сфотографированы, способ измерения контактного усилия и устройство измерения контактного усилия согласно настоящему варианту осуществления также являются применимыми к традиционному пантографу, в котором непосредственно фотографируются кораблевидный корпус 101 и пружинная часть 102.
[0032] Фиг.1 показывает упрощенную схему конструкции устройства измерения контактного усилия согласно первому варианту осуществления настоящего изобретения. В устройстве измерения контактного усилия согласно настоящему варианту осуществления, как показано на фиг.1, линейные датчики 11L, 11C и 11R монтируются на корпусе 10 железнодорожного состава, и устройство освещения 12 предоставляется в положении около датчиков.
[0033] Как показано на фиг.1 и фиг.4, черный материал, не являющийся светоотражательным, предоставляется в части крышки 103 пантографа 100, а светоотражательный белый материал предоставляется в качестве верхних маркеров 2L, 2C и 2R и нижнего маркера 3. Свет излучается в направлении верхних маркеров 2L, 2C и 2R и нижнего маркера 3.
[0034] Изображения верхнего центрального маркера 2C и нижнего маркера 3 записываются посредством центрального линейного датчика 11C. Изображения верхнего левого бокового маркера 2L записываются посредством левого бокового линейного датчика 11L. Изображения верхнего правого бокового маркера 2R записываются посредством правого бокового линейного датчика 11R. Изображения, записываемые посредством линейных датчиков 11L, 11C и 11R, сохраняются в компьютере 13, установленном на борту 10 железнодорожного состава.
[0035] Положение верхнего центрального маркера 2C и положение нижнего маркера 3 в центральной части пантографа 100 определяются посредством обработки изображений, записываемых посредством центрального линейного датчика 11C. Затем относительное смещение вычисляется в соответствии с положением верхней центральной части 2C и положением нижнего маркера 3. Посредством определения разности между относительным смещением и естественной длиной виртуальной комбинированной пружины 1 вычисляется упругость виртуальной комбинированной пружины 1. Сила реакции пружины определяется посредством умножения упругости виртуальной комбинированной пружины 1 на коэффициент жесткости комбинированной виртуальной пружины.
[0036] Изображения, записываемые посредством линейных датчиков 11L, 11C и 11R, обрабатываются посредством компьютера 13 таким образом, что определяются положения верхних маркеров 2L, 2C и 2R пантографа 100. Смещение верхних маркеров 2L, 2C и 2R дифференцируется дважды, так что может быть получено ускорение пантографа 10. Сила инерции пантографа 100 определяется посредством умножения полученного ускорения и эквивалентной массы пантографа 100.
[0037] Дополнительно, в фактическом случае, на подъемную силу, прикладываемую на кораблевидный корпус 101, оказывается влияние посредством результата измерения контактного усилия. Таким образом, подъемная сила определяется посредством следующего уравнения (1)

В вышеприведенном уравнении (1) CL является коэффициентом подъемной силы кораблевидного корпуса, ρ является плотностью воздуха, V является скоростью движения и S является площадью поверхности. Скорость V движения вычисляется в соответствии с данными изображений и фактическими синтезированными данными движения фактического корпуса 10 железнодорожного состава. Другие параметры могут быть определены экспериментально.
В завершение, посредством суммирования силы реакции пружины, силы инерции и подъемной силы, определенных посредством вышеописанного способа, может быть определено контактное усилие пантографа 100.
[0038] Ниже описываются этапы в способе измерения контактного усилия согласно настоящему варианту осуществления.
Фиг.2 является блок-схемой последовательности операций для демонстрации этапов способа измерения контактного усилия согласно первому варианту осуществления настоящего изобретения.
[0039] Как показано на фиг.2, сначала, на этапе P10, изображения, записываемые посредством линейных датчиков 11L, 11C и 11C, сохраняются в компьютере 13, установленном в корпусе 10 железнодорожного состава.
Далее, на этапе P11, положения верхних маркеров 2L, 2C и 2R и нижнего маркера 3 определяются посредством сравнения с сопоставлением с шаблоном, ранее полученным в компьютере, в котором запоминается образец из верхних маркеров 2L, 2C и 2R и нижнего маркера 3.
[0040] На этапе P12 относительное смещение центральной части пантографа 100 вычисляется посредством компьютера 13. Посредством определения разности между относительным смещением и естественной длиной виртуальной комбинированной пружины 1 вычисляется упругость виртуальной комбинированной пружины 1. Таким образом, сила реакции пружины определяется посредством умножения упругости на коэффициент жесткости виртуальной комбинированной пружины 1.
[0041] На этапе P13 с дифференциалом второго порядка выполняются операции относительно смещения верхних маркеров 2L, 2C и 2R посредством компьютера 13 с тем, чтобы получать ускорение пантографа 100. Сила инерции определяется посредством умножения ускорения на площадь поверхности пантографа 100.
[0042] На этапе P14 подъемная сила определяется в соответствии с изображениями и синтезированной фактической скоростью движения корпуса 10 железнодорожного состава в компьютере 13.
В завершение, на этапе P15, контактное усилие пантографа 100 получается посредством суммирования реакции пружины, определенной на этапе P12, силы инерции, определенной на этапе P13, и подъемной силы, определенной на этапе Р14, в компьютере 13.
Эти этапы, описанные выше, являются способом измерения контактного усилия согласно настоящему варианту осуществления.
[0043] Как описано выше, в способе измерения контактного усилия и устройстве измерения контактного усилия согласно настоящему варианту осуществления, даже если кораблевидный корпус 101 и пружинная часть 102, размещаемые в пантографе 100, не могут быть непосредственно сфотографированы, контактное усилие пантографа может измеряться точно.
[0044] Согласно способу измерения контактного усилия и устройству измерения контактного усилия настоящего варианта осуществления контактное усилие может быть определено посредством обработки изображений, записываемых посредством линейных датчиков 11L, 11C и 11R без контактирования с пантографом 100. После сравнения способа настоящего варианта осуществления и способа, раскрытого в патентных документах 2 и 3, не обязательно выполнять некоторые конкретные этапы, к примеру этап для размещения кабельных проводов и отверстий, с тем, чтобы устанавливать датчики и светодиодные устройства на пантографе 100 в настоящем варианте осуществления.
[0045] Согласно способу измерения контактного усилия и устройству измерения контактного усилия согласно настоящему варианту осуществления, контактное усилие пантографа может точно измеряться с высокой производительностью пространственного анализа и высокой синтезированной производительностью за счет использования линейных датчиков 11L, 11C и 11R.
Вариант 2 осуществления
[0046] Далее описываются способ измерения контактного усилия и устройство измерения контактного усилия второго варианта осуществления согласно настоящему изобретению.
Фиг.5 показывает упрощенную схему конструкции устройства измерения контактного усилия согласно второму варианту осуществления настоящего изобретения.
Как показано на фиг.5, устройство измерения контактного усилия согласно второму варианту осуществления является практически аналогичным устройству измерения контактного усилия согласно первому варианту осуществления, за исключением аспекта, описанного ниже. Во втором варианте осуществления левый верхний маркер 2L из левого и правого маркеров 2L и 2R виртуально размещается в положении, линейно спрогнозированном на основе положения правого верхнего маркера 2R и положения центрального верхнего маркера 2C, так что контактное усилие пантографа 100 может быть определено без предоставления левого линейного датчика 11L.
[0047] Иными словами, в устройстве измерения контактного усилия согласно второму варианту осуществления может исключаться один из левого и правого линейных датчиков 11L и 11R из трех линейных датчиков 11L, 11C и 11R, как показано на фиг.1. В настоящем варианте осуществления описывается случай, в котором исключается левый линейный датчик 11L.
[0048] В настоящем варианте осуществления, как показано на фиг.7, на линии S, совмещающейся от правого верхнего маркера 2R к центральному верхнему маркеру 2C, точка, проходящая от центрального верхнего маркера 2C на расстояние L, распознается в качестве точки 4 виртуального маркера, на которой считается виртуально расположенным другой маркер. В силу этого, даже если левый линейный датчик 11L исключается, смещение пантографа 100 в трех точках может быть определено за счет использования точки 4 виртуального маркера.
[0049] Описываются этапы способа измерения контактного усилия согласно настоящему варианту осуществления.
Фиг.6 является блок-схемой последовательности операций для демонстрации этапов способа измерения контактного усилия согласно второму варианту осуществления настоящего изобретения.
Как показано на фиг.6, во-первых, на этапе P20, изображения, записываемые посредством линейных датчиков 11C и 11R, сохраняются в компьютере 13, установленном в корпусе 10 железнодорожного состава.
[0050] На этапе P21 положения верхних маркеров 2C и 2R и нижнего маркера 3 определяются посредством сравнения с сопоставлением с шаблоном, ранее полученным в компьютере 13, в котором запоминается образец верхних маркеров 2C и 2R и нижнего маркера 3.
[0051] На этапе P22, после сопоставления с шаблоном посредством компьютера 13, определяется точка 4 виртуального маркера посредством линейного прогнозирования. Этот этап отличается от этапов в способе измерения контактного усилия согласно первому варианту осуществления.
[0052] На этапе Р23 относительное смещение центральной части пантографа 100 вычисляется посредством компьютера 13. Посредством определения разности между относительным смещением и естественной длиной виртуальной комбинированной пружины 1 вычисляется упругость виртуальной комбинированной пружины 1. Таким образом, сила реакции пружины определяется посредством умножения упругости на коэффициент жесткости виртуальной комбинированной пружины 1.
[0053] На этапе P24 с дифференциалом второго порядка выполняются операции относительно смещения верхних маркеров 2C и 2R посредством компьютера 13 с тем, чтобы вычислять ускорение пантографа 100. Сила инерции определяется посредством умножения ускорения на площадь поверхности пантографа 100.
[0054] На этапе P25 подъемная сила определяется в соответствии с изображениями и синтезированной фактической скоростью движения корпуса 10 железнодорожного состава в компьютере 13.
В завершение, на этапе P26 контактное усилие пантографа 100 получается посредством суммирования реакции пружины, определенной на этапе P23, силы инерции, определенной на этапе P24, и подъемной силы, определенной на этапе Р25, в компьютере 13.
Этапы, описанные выше, являются способом измерения контактного усилия согласно второму варианту осуществления.
[0055] Как описано выше, в способе измерения контактного усилия и устройстве измерения контактного усилия согласно второму варианту осуществления, в дополнение к преимуществам, полученным посредством способа измерения контактного усилия и устройства измерения контактного усилия согласно первому варианту осуществления, контактное усилие пантографа 100 может быть определено посредством распознавания точки 4 виртуального маркера в соответствии с положениями правого верхнего маркера 2R и центрального верхнего маркера 2C. Таким образом, может исключаться левый линейный датчик 11L, предоставляемый в устройстве измерения контактного усилия согласно первому варианту осуществления.
[0056] Согласно способу измерения контактного усилия и устройству измерения контактного усилия согласно второму варианту осуществления может исключаться левый верхний маркер 2L, предоставляемый в устройстве измерения контактного усилия согласно первому варианту осуществления, так что сопоставление с шаблоном для определения положения левого верхнего маркера 2L в записанном изображении является необязательным. Таким образом, число сопоставлений с шаблоном может сокращаться. При сравнении второго варианта осуществления и первого варианта осуществления этапы могут обрабатываться быстрее во втором варианте осуществления.
Вариант 3 осуществления
[0057] Описываются способ измерения контактного усилия и устройство измерения контактного усилия третьего варианта осуществления согласно настоящему изобретению.
Фиг.9 является упрощенной схемой для демонстрации примера того, как кораблевидный корпус изгибается посредством упругой вибрации в устройстве измерения контактного усилия согласно третьему варианту осуществления.
Как показано на фиг.9, в диапазоне частот вибрации, в котором влияние упругой вибрации кораблевидного корпуса 101 не может игнорироваться, кораблевидный корпус 101 изгибается таким образом, что смещение кораблевидного корпуса 101 не может измеряться корректно в точке обзора от центрального верхнего маркера 2C крышки 103. Таким образом, необходимо распознавать среднюю точку 5 левого верхнего маркера 2L и правого верхнего маркера 2R в качестве точки вышеописанной комбинированной пружины 1.
[0058] Хотя конструкция устройства измерения контактного усилия согласно третьему варианту осуществления является аналогичной конструкции согласно первому варианту осуществления, в третьем варианте осуществления относительное смещение вычисляется посредством средней точки 5 левого верхнего маркера 2L и правого верхнего маркера 2R и положения нижнего маркера 3.
Хотя центральный верхний маркер 2C предоставляется в настоящем варианте осуществления, центральный верхний маркер 2C может исключаться.
[0059] Фиг.8 показывает упрощенную схему примера относительного смещения посредством устройства измерения контактного усилия согласно третьему варианту осуществления настоящего изобретения.
В настоящем варианте осуществления, как показано на фиг.8, относительное смещение распознается в качестве расстояния между верхним положением комбинированной пружины 1, определенным посредством средней точки 5 левого верхнего маркера 2L и правого верхнего маркера 2R, и нижним положением комбинированной пружины 1, определенным посредством нижнего маркера 3. В данном документе относительное смещение является зазором между средней точкой 5 левого верхнего маркера 2L и правого верхнего маркера 2R и нижним маркером 3, как показано посредством стрелки D на фиг.8 и фиг.9.
[0060] Далее описываются этапы процесса в способе измерения контактного усилия согласно настоящему варианту осуществления.
Процесс способа измерения контактного усилия согласно настоящему варианту осуществления почти идентичен процессу способа измерения контактного усилия согласно первому варианту осуществления, за исключением этапов P11-P13, как описано ниже.
[0061] В третьем варианте осуществления, на этапе P11, как показано на фиг.2, положения верхнего левого и правого маркеров 2L и 2R и нижнего маркера 3 определяются в сохраненных изображениях пантографа посредством сравнения с сопоставлением с шаблоном, ранее полученным в компьютере 13, в котором запоминается образец верхних маркеров 2L и 2R и нижнего маркера 3.
[0062] На этапе P12 относительное смещение центральной части пантографа 100 вычисляется на основе средней точки 5 левого верхнего маркера 2L и правого верхнего маркера 5 и положения нижнего маркера 3 посредством компьютера 13. Посредством определения разности между относительным смещением и естественной длиной виртуальной комбинированной пружины 1 вычисляется упругость виртуальной комбинированной пружины 1. Таким образом, сила реакции пружины определяется посредством умножения упругости на коэффициент жесткости виртуальной комбинированной пружины 1.
[0063] На этапе P13 с дифференциалом второго порядка выполняются операции относительно смещения верхних маркеров 2L и 2R и смещения средней точки 5 левого верхнего маркера 2L и правого верхнего маркера 2R посредством компьютера 13 с тем, чтобы вычислять ускорение пантографа 100. Сила инерции определяется посредством умножения вычисленного ускорения и эквивалентной массы пантографа 100.
[0064] В варианте осуществления, как описано выше, хотя центральный верхний маркер 2C предоставляется, центральный верхний маркер 2C может исключаться. Дополнительно, в случае одного диапазона частот вибрации, в котором может игнорироваться упругая вибрация кораблевидного корпуса 101, т.е. в случае, если кораблевидный корпус 101 не изгибается, может выполняться способ измерения контактного усилия согласно первому варианту осуществления. В случае другого диапазона частот вибрации, в котором не может игнорироваться упругая вибрация кораблевидного корпуса 101, т.е. в случае, если кораблевидный корпус 101 изгибается, может осуществляться способ измерения контактного усилия согласно настоящему варианту осуществления.
[0065] Как описано выше, в соответствии со способом измерения контактного усилия и устройством измерения контактного усилия согласно настоящему варианту осуществления, даже если кораблевидный корпус 101 и пружина 102 пантографа 100 не могут быть непосредственно сфотографированы и кораблевидный корпус 101 изгибается в диапазоне частот вибрации, в котором упругая вибрация кораблевидного корпуса 101 не может игнорироваться, контактное усилие пантографа 100 может точно измеряться.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ ИЗОБРЕТЕНИЯ
[0066] Настоящее изобретение является применимым к способу измерения контактного усилия для измерения контактного усилия пантографа посредством обработки изображений и к устройству измерения контактного усилия, в частности к способу измерения контактного усилия для измерения контактного усилия пантографа, кораблевидный корпус и пружина которого не могут быть непосредственно сфотографированы, без использования упругости пружины.
ОПИСАНИЕ ССЫЛОЧНЫХ НОМЕРОВ НА ЧЕРТЕЖАХ
[0067]
1 - комбинированная пружина
2L - левый верхний маркер
2C - центральный верхний маркер
2R - правый верхний маркер
3 - нижний маркер
4 - точка виртуального маркера
5 - средняя точка
10 - корпус железнодорожного состава
11L - левый линейный датчик
11C - центральный линейный датчик
11R - правый линейный датчик
12 - устройство освещения
13 - компьютер
100 - пантограф
101 - кораблевидный корпус верхней части токоприемника
102 - пружина
103 - крышка
104 - опорный элемент верхней части токоприемника
Реферат
Способ измерения контактного усилия и устройство измерения контактного усилия позволяют измерять контактное усилие пантографа с использованием обработки изображений даже для пантографов с конструкцией, которая не допускает непосредственное фотографирование верхней части токоприемника и пружины. Изображения пантографа (100) захватываются, множество пружин комбинируется, и считается, что виртуально синтезированная пружина существует в центре пантографа (100) в направлении ширины. Из изображений вычисляется частичное относительное смещение между положением, соответствующим верхней части токоприемника в центре пантографа (100) в направлении ширины, и опорой верхней части токоприемника. Упругость виртуально синтезированной пружины вычисляется посредством определения разности между относительным смещением и естественной длиной виртуально синтезированной пружины. Сила реакции пружины определяется посредством умножения коэффициента жесткости виртуально синтезированной пружины на упругость. Действие подъемной силы на верхней части токоприемника определяется из данных скорости движения вагона, когда изображения и время синхронизированы, и сила реакции пружины, сила инерции и подъемная сила затем суммируются для того, чтобы определять контактное усилие. 2 н. и 6 з.п. ф-лы, 10 ил.
Формула
- этап, на котором записывают изображения упомянутого пантографа;
- этап, на котором подразумевают виртуальную комбинированную пружину в центральной части упомянутого пантографа вдоль направления ширины посредством комбинирования упомянутого множества пружин, вычисляют относительное смещение между положением, соответствующим упомянутому кораблевидному корпусу в упомянутой центральной части упомянутого пантографа вдоль упомянутого направления ширины, и упомянутым опорным элементом кораблевидного корпуса и вычисляют упругость упомянутой виртуальной комбинированной пружины посредством определения разности между упомянутым относительным смещением и естественной длиной упомянутой виртуальной комбинированной пружины, чтобы определять силу реакции пружины посредством умножения упомянутой упругости на коэффициент жесткости пружины упомянутой виртуальной комбинированной пружины;
- этап, на котором выполняют операции с дифференциалом второго порядка относительно смещения в упомянутом положении, соответствующем упомянутому кораблевидному корпусу, чтобы вычислять ускорение упомянутого пантографа в соответствии с упомянутыми изображениями, и вычисляют силу инерции посредством умножения упомянутого ускорения на эквивалентную массу упомянутого пантографа;
- этап, на котором определяют подъемную силу на основе упомянутых изображений и данных скорости фактически движущегося железнодорожного состава, которые синхронизированы во времени; и
- этап, на котором измеряют контактное усилие посредством суммирования упомянутой реакции пружины, упомянутой силы инерции и упомянутой подъемной силы.
- этап, на котором определяют положения маркеров, при этом один маркер размещается в упомянутой центральной части упомянутого пантографа вдоль направления ширины, соответствующего упомянутому кораблевидному корпусу, два других маркера размещаются на обеих сторонах упомянутого пантографа, каждый маркер размещается на одной стороне пантографа вдоль направления ширины, соответствующего упомянутому кораблевидному корпусу, и другой один маркер размещается на упомянутой кораблевидной опоре,
- причем упомянутый этап для определения положений маркеров отличается тем, что он включает в себя этап, на котором определяют положения трех упомянутых маркеров, размещаемых в пантографе, соответствующем упомянутому кораблевидному корпусу, и положение упомянутого маркера, размещаемого в упомянутой опоре кораблевидного корпуса, посредством обработки упомянутых изображений.
- этап, на котором определяют положения маркеров, при этом два маркера размещаются на обеих сторонах упомянутого пантографа вдоль направления ширины, соответствующего кораблевидному корпусу, каждый маркер размещается на одной стороне пантографа, и один другой маркер размещается на упомянутой кораблевидной опоре,
- причем упомянутый этап для определения положений маркеров отличается тем, что он включает в себя этап, на котором определяют положения двух упомянутых маркеров, размещаемых на обеих сторонах упомянутого пантографа, соответствующих упомянутому кораблевидному корпусу, и положение упомянутого другого маркера, размещаемого в упомянутой опоре кораблевидного корпуса, посредством обработки упомянутых изображений.
- этап, на котором определяют положения маркеров, при этом один маркер размещается в упомянутой центральной части упомянутого пантографа вдоль направления ширины, соответствующего упомянутому кораблевидному корпусу, другой маркер размещается на одной из обеих сторон упомянутого пантографа вдоль направления ширины, соответствующего упомянутому кораблевидному корпусу, и еще один другой маркер размещается на упомянутой кораблевидной опоре,
- причем упомянутый этап для определения положений маркеров отличается тем, что он включает в себя этап, на котором определяют положения двух маркеров, размещаемых в упомянутом пантографе, соответствующем упомянутому кораблевидному корпусу, и положение упомянутого маркера, размещаемого на упомянутой кораблевидной опоре, при этом виртуальный маркер считается размещенным в точке, линейно спрогнозированной в соответствии с положением упомянутого маркера, размещаемого в упомянутой центральной части упомянутого пантографа, соответствующей упомянутому кораблевидному корпусу, и упомянутого маркера, размещаемого на одной из упомянутых обеих сторон упомянутого пантографа вдоль направления ширины, соответствующего упомянутому кораблевидному корпусу.
- средство записи для записи изображений упомянутого пантографа и средство измерения для измерения контактного усилия упомянутого пантографа, в котором виртуальная комбинированная пружина считается размещенной в центральной части упомянутого пантографа вдоль направления ширины посредством комбинирования множества упомянутых пружин, относительное смещение вычисляется в соответствии с упомянутой центральной частью упомянутого пантографа вдоль направления ширины, соответствующего упомянутому кораблевидному корпусу, и упомянутой кораблевидной опорой посредством обработки упомянутых изображений, разности между упомянутым относительным смещением и естественной длиной упомянутой виртуальной комбинированной пружины с тем, чтобы вычислять упругость упомянутой виртуальной комбинированной пружины, сила реакции пружины определяется посредством умножения упомянутой упругости на коэффициент жесткости пружины упомянутой виртуальной комбинированной пружины, ускорение пантографа определяется посредством дифференцирования смещения упомянутого кораблевидного корпуса посредством обработки упомянутых изображений, сила инерции определяется посредством умножения упомянутого ускорения на эквивалентную массу упомянутого пантографа, подъемная сила, прикладываемая к упомянутому пантографу, определяется посредством обработки упомянутых изображений и синхронизированных данных фактической скорости движения железнодорожного состава, и упомянутое средство измерения определяет контактное усилие посредством суммирования упомянутой силы реакции пружины, упомянутой силы инерции и упомянутой подъемной силы.
- упомянутое средство измерения определяет положения трех упомянутых маркеров, размещаемых в упомянутом пантографе, соответствующем упомянутому кораблевидному корпусу, и положение упомянутого маркера, размещаемого на упомянутой опоре кораблевидного корпуса, посредством обработки упомянутых изображений.
Комментарии