Способ получения пружины и пружина - RU2759059C1
Код документа: RU2759059C1
Чертежи



Описание
Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к способу получения пружины, такой как винтовая пружина, и к пружине.
Предшествующий уровень техники настоящего изобретения
Согласно общему правилу в изделиях в виде пружин, используемых в качестве автозапчастей, таких как винтовые пружины, должно отсутствовать напряжение, концентрируемое в определенной части пружины, когда она используется под нагрузкой, исходя из требований уменьшения веса. Метод конечных элементов используется для проектирования пружины таким образом, чтобы распределение напряжения, обусловленное формой пружины, было оптимальным под нагрузкой, при этом распределение напряжения реального изделия под нагрузкой проверить сложно. По сути, напряжение в пружине должно оцениваться как с учетом напряжения, обусловленного формой пружины, так и с учетом остаточного напряжения после дробеструйного упрочнения.
В настоящее время напряжение, обусловленное формой пружины, проверяется путем замера внешней формы пружины и его моделирования методом конечных элементов под расчетной нагрузкой. Остаточное напряжение после дробеструйного упрочнения проверяется методом неразрушающего контроля и, следовательно, без приложения нагрузки. В патентном документе 1 представлен способ измерения остаточного напряжения изделия после дробеструйного упрочнения методом неразрушающего контроля каждого изделия.
Документ предшествующего уровня техники
Патентный документ
Патентный документ 1: WO 2017/199959 А1
Краткое раскрытие настоящего изобретения
Задача, решаемая настоящим изобретением
В патентном документе 1 раскрывается изобретение, контролирующее лишь воздействие процесса дробеструйного упрочнения, тогда как на пружину как на изделие в реальном исполнении влияет предшествующий процесс, а форма и распределение напряжения существенно изменяются под нагрузкой. Иначе говоря, патентный документ 1 недостаточен для оценки пружины в качестве реального изделия. Следовательно, существует потребность в способе получения пружины и в пружине, которые обеспечивали бы возможность контроля распределения напряжения пружины под нагрузкой.
Представленный вариант осуществления настоящего изобретения предложен с учетом описанной фактической ситуации, и он служит цели обеспечения способа получения пружины и пружины для контроля распределения напряжения пружины под нагрузкой.
Средства для решения задачи
Для устранения указанных проблем способ получения пружины согласно настоящему изобретению предусматривает выполнение стадий нагружения пружины, измерения напряжения пружины под нагрузкой и снятия нагрузки, приложенной к пружине. Стадия измерения напряжения пружины может предусматривать измерение напряжения на поверхности рабочей части пружины с использованием рентгенодифракции методом cos α. Стадия нагружения пружины может предусматривать удержание нагрузки фиксирующим приспособлением. Прикладываемая нагрузка может варьироваться от нуля до максимальной нагрузки, используемой в процессе эксплуатации. Кроме того, приложение нагрузки предполагается с учетом конфигурации, в которой устанавливается пружина, и цели ее установки.
Способ получения пружины согласно настоящему изобретению может предусматривать стадию определения того, удовлетворяет ли величина измеренного напряжения пружины определенному критерию. Если на этой стадии определения будет установлено несоответствие заданному критерию, то пружина отбраковывается как дефектное изделие.
Пружиной может служить, помимо прочего, винтовая пружина, пластинчатая пружина, стабилизатор, торсионный стержень или тарельчатая пружина. Пружина согласно настоящему изобретению включает в себя изделие, полученное указанным выше способом.
Технический эффект настоящего изобретения
Согласно настоящему изобретению может быть получена пружина с подтвержденным распределением напряжения под нагрузкой, и может быть обеспечено устойчивое заведение пружины, спроектированной с уменьшением веса.
Краткое описание фигур
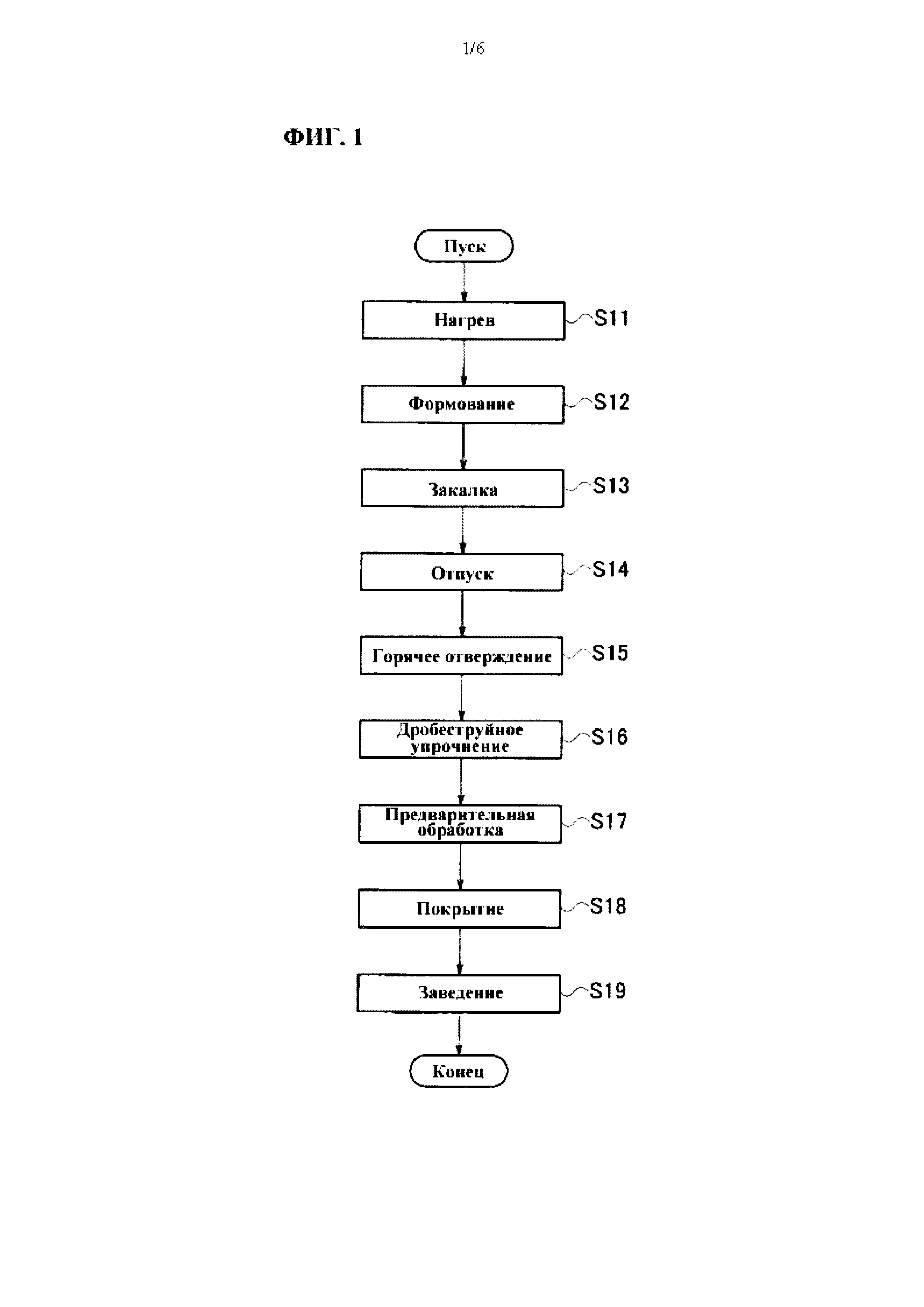
На фиг. 1 показана блок-схема, иллюстрирующая ряд стадий реализации способа получения пружины согласно представленному варианту осуществления настоящего изобретения;
На фиг. 2 показана блок-схема, иллюстрирующая процесс измерения распределения напряжения под нагрузкой при реализации способа получения пружины согласно представленному варианту осуществления настоящего изобретения;
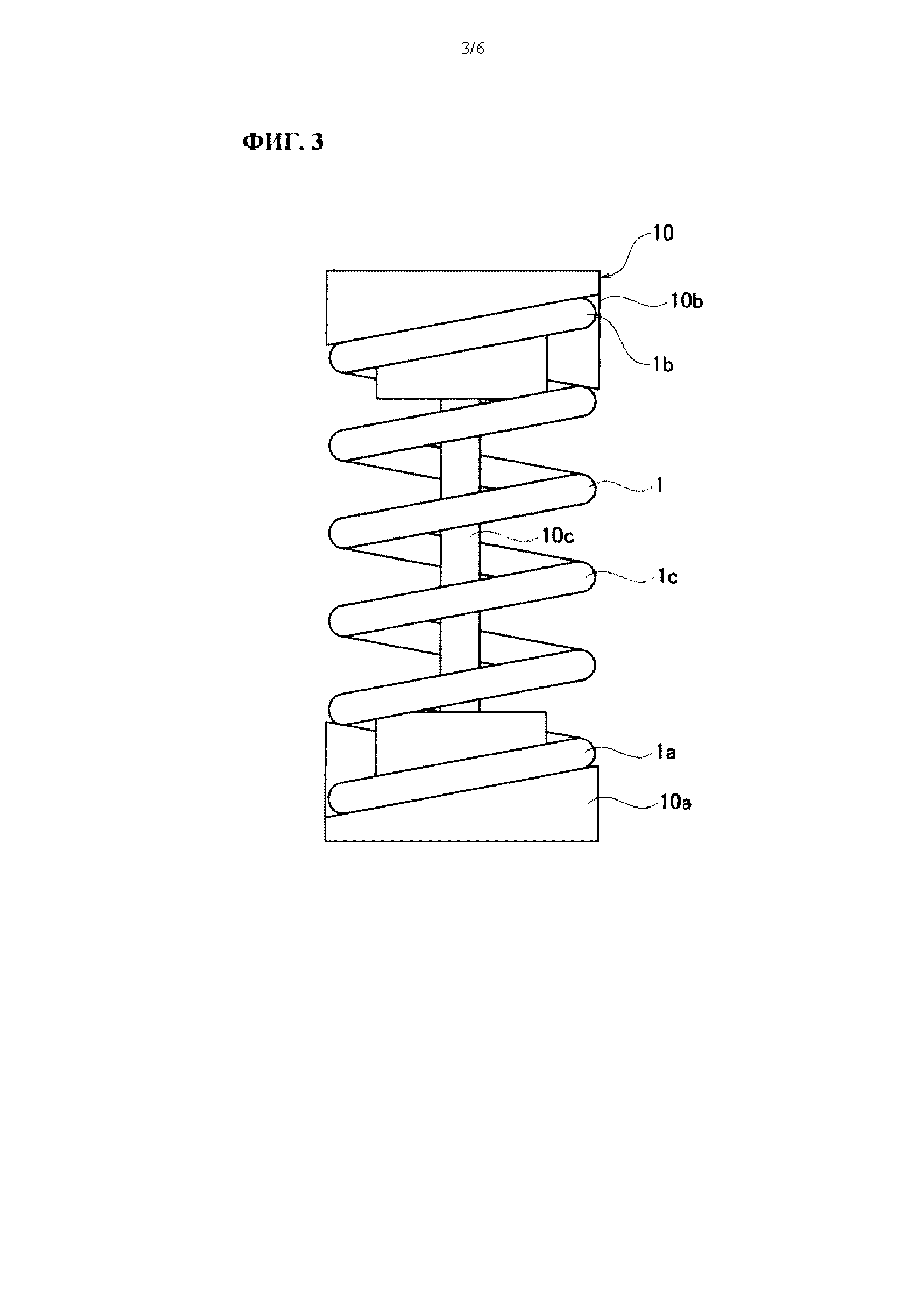
На фиг. 3 показан вид спереди пружины, нагруженной фиксирующим приспособлением;
На фиг. 4 представлена общая схема, иллюстрирующая измерение напряжения с использованием рентгенодифракции методом cos α;
На фиг. 5 представлен увеличенный вид пружины спереди, где показано направление, в котором измеряется напряжение;
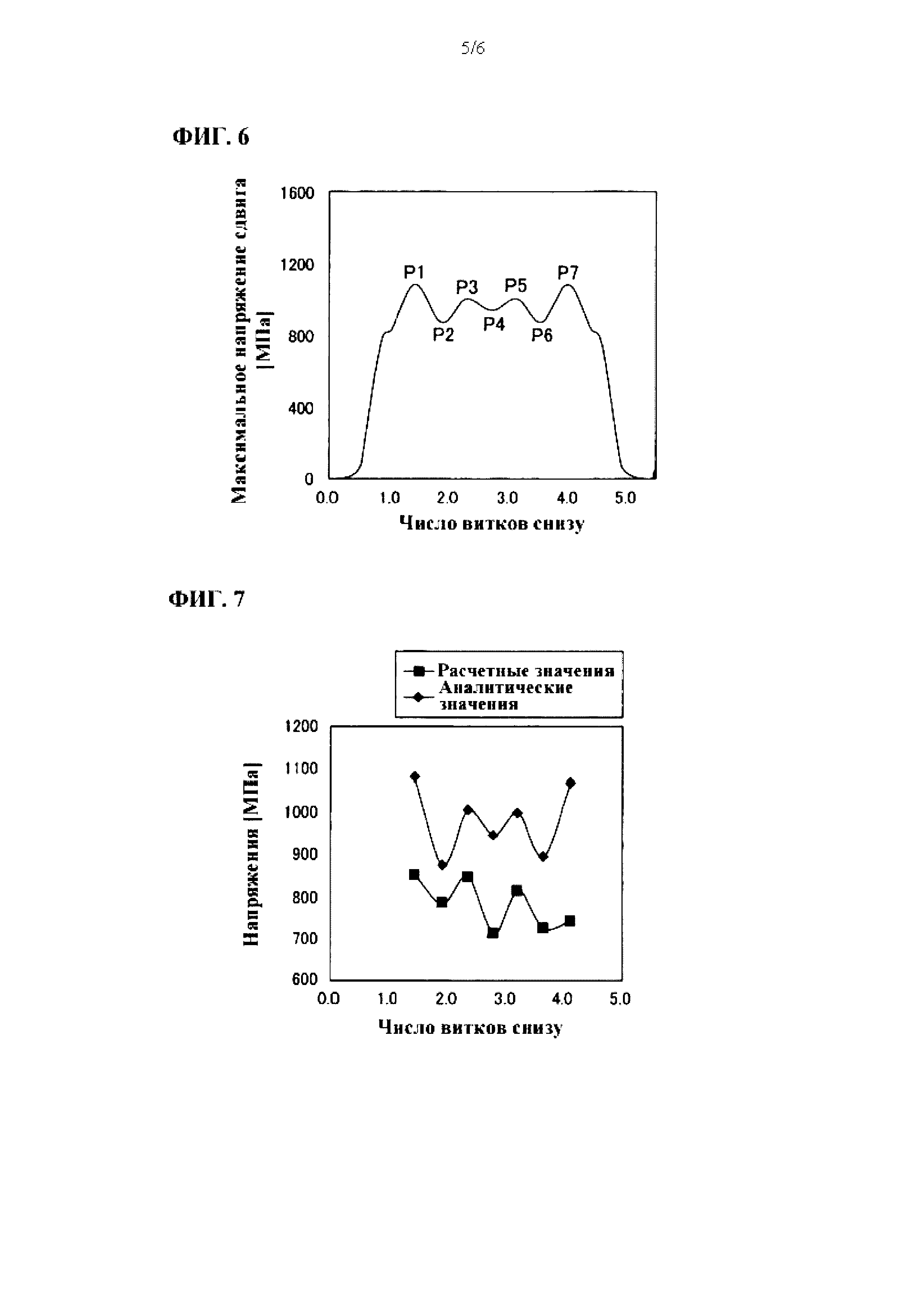
На фиг. 6 показан график, иллюстрирующий распределение напряжения вследствие изменения формы пружины, рассчитанное методом конечных элементов;
На фиг. 7 показан график сравнения разницы между значениями напряжения, измеренными под нагрузкой и без нагрузки, и значениями, проанализированными методом конечных элементов;
На фиг. 8 показана блок-схема, иллюстрирующая ряд стадий способа получения пружины согласно представленному варианту осуществления настоящего изобретения применительно к процессу без нагревания.
Подробное раскрытие одного из вариантов осуществления настоящего изобретения
Ниже подробно описан способ получения пружины и пружина согласно настоящему изобретению в привязке к чертежам. В представленном варианте осуществления настоящего изобретения предполагается, что не носит ограничительного характера, что в ходе выполнения процесса, проходящего при нагревании, в качестве пружины будет получена винтовая пружина, выполненная из материала SUP 12, с диаметром (d) материала 13 мм, средним диаметром (D) витка 112 мм, свободной высотой (Н) 326 мм, эффективным числом (Ne) витков 4,1 и общим количеством (Nt) витков 5,5. Кроме того, предложенный способ применим к пружинам других типов, и может быть использован процесс без нагревания.
На фиг. 1 показана блок-схема, иллюстрирующая ряд стадий реализации способа получения пружины согласно представленному варианту осуществления настоящего изобретения. В этом варианте осуществления настоящего изобретения на стадии S11 выполняется нагрев стержня-заготовки, на стадии S12 стержню-заготовке придается форма винтовой пружины, затем пружина подвергается закалке на стадии S13 и отпуску на стадии S14, после чего на стадии S15 выполняется горячее отверждение. Горячее отверждение снимает пластическую деформацию в процессе работы за счет приложения к пружине избыточной нагрузки в нагретом состоянии и заставляет ее пластически деформироваться до нагружения. На стадии S16 проводится дробеструйное упрочнение пружины. Дробеструйное упрочнение придает поверхности пружины сжимающее остаточное напряжение заданной величины. На стадии S17 осуществляется предварительная обработка пружина для покрытия, а на стадии S18 выполняется покрытие пружины. На стадии S19 к пружине прикладывается избыточная нагрузка при комнатной температуре, и пружина предварительно заводится для пластической деформации, вследствие чего во время работы пластическая деформация снимается.
На фиг. 2 показана блок-схема, иллюстрирующая процесс измерения распределения напряжения под нагрузкой. На стадии S21 к пружине 1 прикладывается заданная нагрузка. На фиг. 3 представлен вид пружины 1 спереди с нагрузкой, приложенной фиксирующим приспособлением 10.
Как показано на фиг. 3, винтовая пружина 1 опирается на нижнюю опорную часть 1а и верхнюю опорную часть 1b фиксирующего приспособления 10, причем нижняя опорная извитая часть 1а опирается на нижнюю опорную часть 10а фиксирующего приспособления 10, а верхняя опорная извитая часть 1b опирается на верхнюю опорную часть 10b фиксирующего приспособления 10. Расстояние между нижней опорной частью 10а и верхней опорной частью 10b может варьироваться вдоль вала 10с, соединяющего нижнюю опорную часть 10а и верхнюю опорную часть 10b, и оно задается таким образом, чтобы к пружине 1 прикладывалась заданная нагрузка. В представленном варианте осуществления настоящего изобретения для сжатия предполагается приложение нагрузки в 7200 Н.
На стадии S22 проводится измерение напряжение пружины. В этом варианте осуществления настоящего изобретения напряжение пружины 1 измеряется с использованием рентгенодифракции методом cos α.
На фиг. 4 показан общий вид, иллюстрирующий измерение напряжения с использованием рентгенодифракции методом cosα. При реализации способа получения пружины согласно настоящему изобретению применяется устройство для измерения напряжения рентгенодифракционным методом, предназначенное для измерения напряжения методом cosα. Устройство для измерения напряжения рентгенодифракционным методом испускает рентгеновские лучи 31 в требуемую точку на образце 30 и детектирует кольцо 33 Дебая по всему диаметру дифрагированным пучком рентгеновских лучей 32 в плоскости 21 детектирования устройства для измерения напряжения рентгенодифракционным методом, благодаря чему напряжение может быть измерено однократным излучением.
На фиг. 5 показан частично увеличенный вил спереди, иллюстрирующий направление, в котором измеряется напряжение в пружине. В этом варианте осуществления настоящего изобретения было измерено напряжение сдвига при кручении на наружной поверхности рабочей части 1с, исключая нижнюю опорную извитую часть 1а и верхнюю опорную извитую часть 1b пружины 1. Напряжения были измерены в направлении под углом 45 градусов к направлению, в котором проходит пружинная проволока, что обозначено стрелкой 35 на фиг. 5.
В Таблице 1 показаны результаты измерения напряжений, проведенного системой измерения напряжений рентгенодифракционным методом. Единицами измерения напряжения служат мегапаскали (МПа). Напряжения были измерены три раза в семи положениях, начиная с положения Р1 и заканчивая положением Р7, по порядку снизу пружины 1, после чего было получено среднее значение результатов измерений. Положения Р1-Р7 были зафиксированы на пиках и впадинах кривой, где напряжения достигают максимума и минимума, исходя из результатов анализа методом конечных элементов, показанных на фиг. 6.

Напряжения были измерения при нагрузке, равной 0 Н (ньютонов, как и далее по тексту), без нагрузки и под нагрузкой, равной 7200 Н. Разница между этими измеренными значениями была использована в качестве расчетного значения и сопоставлена с расчетным значением методом конечных элементов. Как показано в Таблице 1, наблюдаются различия между расчетными и аналитическими значениями, и становится понятно, что для оценки изделий в виде пружин необходимо измерение напряжения под нагрузкой. На фиг. 7 показан график сравнения разницы между значениями напряжения, измеренными под нагрузкой и без нагрузки, и аналитическими значениями с использованием метода конечных элементов. Аналогично результатам, представленным в Таблице 1, по результатам использования метода конечных элементов также наблюдается разница между измеренными значениями напряжения и аналитическими значениями.
На стадии S23, показанной на фиг. 2, производится сброс нагрузки, приложенной к пружине 1. Пружина 1 снимается с фиксирующего приспособления 10, поскольку измерение напряжения с приложением нагрузки, выполняемое на стадии S22, завершено. Этим обеспечивается сброс нагрузки, приложенной к пружине 1.
На стадии S24 определяется, удовлетворяет ли напряжение, измеренное на стадии S22, определенному критерию или нет. Например, если измеренное напряжение удовлетворяет заданному критерию, то оно считается годным, а если это напряжение не удовлетворяет заданному критерию, то оно считается негодным.
В этом варианте осуществления настоящего изобретения пружина 1, нагруженная фиксирующим приспособлением 10, помещается на верхнюю поверхность держателя и измеряется отдельно с помощью устройства для измерения напряжения рентгенодифракционным методом, но вместо этого напряжение может быть измерено для всех множественных пружин 1, функционирующих в линии. Для этого к пружинам 1, функционирующим в линии, может быть заранее приложена нагрузка с помощью фиксирующего приспособления 10 или иного устройства подобного рода, а заданное положение пружины 1 может быть измерено одним или несколькими устройствами для измерения напряжения рентгенодифракционным методом.
На фиг. 8 показана блок-схема, иллюстрирующая ряд стадий способа получения пружины согласно представленному варианту осуществления настоящего изобретения применительно к процессу без нагревания. В случае процесса без нагревания на стадии S31 выполняется формование материала катушки, которому придается форма винтовой пружины при комнатной температуре; на стадии S32 выполняется отпуск пружины; на стадии S33 пружина подвергается горячему отверждению; на стадии S34 выполняется дробеструйное упрочение пружины; и на стадии S35 пружина подвергается предварительной обработке для последующего покрытия; после чего на стадии S36 выполняется покрытие пружины. На стадии S37 к пружине прикладывается избыточная нагрузка при комнатной температуре, и пружина заводится, что обуславливает пластическую деформацию до нагружения, вследствие чего во время работы пластическая деформация снимается. Это верно и для процесса без нагревания в том смысле, что выполняются стадии процесса, проиллюстрированные на фиг. 2.
При реализации способа получения пружины согласно настоящему изобретению распределение напряжения в пружине под нагрузкой измеряется напрямую с помощью устройства для измерения напряжения рентгенодифракционным методом с использованием метода cosα. Следовательно, может быть подтверждено точное распределение напряжения пружины под нагрузкой, и благодаря этому может быть обеспечено устойчивое заведение пружины, спроектированной с уменьшением веса.
Промышленная применимость
Настоящее изобретение применимо к способу получения пружины, такой как винтовая пружина, и к пружине.
Описание условных обозначений
1 пружина
10 фиксирующее приспособление.
Реферат
Группа изобретений относится к области машиностроения. Способ получения пружины предусматривает стадии нагружения пружины, измерения напряжения пружины под нагрузкой и снятия нагрузки, приложенной к пружине. Измерение напряжения пружины осуществляется путем измерения напряжения на поверхности рабочей части пружины с использованием рентгенодифракции методом cos α. Пружину получают предложенным выше способом. Достигается получение пружины с подтвержденным распределением напряжения под нагрузкой и обеспечение устойчивого заведения пружины, спроектированной с уменьшением веса. 2 н. и 3 з.п. ф-лы, 8 ил., 1 табл.
Комментарии