Система измерения воздушных параметров полета - RU2290646C1
Код документа: RU2290646C1
Чертежи








Описание
Изобретение относится к области авиации и, в частности, к определению воздушных параметров полета летательных аппаратов.
Измерения параметров полета (потока) является одной из важнейших задач аэромеханики и аэродинамики летательных аппаратов (ЛА). В настоящее время для измерения параметров полета используются приемники воздушного давления (ПВД), устанавливаемые, зачастую, непосредственно на фюзеляже или любом другом элементе ЛА. При этом на ЛА устанавливается, как правило, несколько таких ПВД, измеряющих местные параметры потока, близкого к плоскому. Истинные параметры полета определяют на основе предварительно проведенных градуировок ПВД. Задача измерения параметров полета весьма важна для маневренных самолетов в связи с существенным расширением летных углов атаки и широким диапазоном скоростей (от малых дозвуковых до больших сверхзвуковых). Эта задача важна и для вертолетов в связи с их высокими маневренными возможностями (полеты вперед-назад, вправо-влево, вверх-вниз) и автоматизацией таких режимов полета с использованием данных от системы измерения параметров полета (см., например, Петунин А.Н. «Измерение параметров газового потока.» М., Изд-во «Машиностроение», 1974 г.; патент РФ №2042137, МПК G 01 P 5/16, 1993 г.; патент США №5406839, кл. 73/180; 73/170.02; 73/202, 1995 г.; патент Франции №2802636, МПК G 01 L 7/00, 1999 г.; Козицын В.К. и др. «Анализ принципов построения систем воздушных сигналов вертолета». Авиакосмическое приборостроение, 2003, №10).
Наиболее близким из известных технических решений (см., например, патент США №3329016, кл. 73/178Х, 1967 г.; патент ЕПВ (ЕР) №0249848, МПК G 01 P 15/00, 1987 г.; патент США №4768386, кл. 73/861/66; 73/147, 1988 г.; патент США №5299455, кл. 73/180, 181, 147, 204.11, 1994 г.; патент РФ №20337157, МПК G 01 P 5/16, 1995 г.; патент США №5423209, кл. 73/182, 73/861.66, 1995 г.; WO 2086516, МПК G 01 P 5/165, 2003 г.; патент РФ №41875 на ПМ, МПК G 01 P 5/00, 2004 г.; Солдаткин В.В. «Комплексная система измерения малых воздушных скоростей вертолета». Труды XIII Международного семинара. М., Изд-во МГУ, 2004 г., с.397-398) является система измерения воздушных параметров полета (патент США №6419186, кл. 73/182, 244/17.11, 2002 г.), состоящая из различных блоков и агрегатов. К ним относится, например, блок ПВД с приемными отверстиями, снабженных электронагревательной противообледенительной системой. ПВД устанавливаются на летательном аппарате и с помощью пневмотрасс соединяются с блоком датчиков давления. Система может быть снабжена также блоком датчиков температуры наружного воздуха (или температуры торможения). Сигналы от указанных датчиков давления и температуры поступают в блок вычислителя, в котором на основе заранее выполненных градуировок вычисляются параметры полета летательного аппарата. ПВД в такой системе измерения располагаются, как правило, на фюзеляже ЛА, а все остальные блоки, в т.ч. блок электропитания, - внутри фюзеляжа ЛА. Недостатками данной системы являются:
- отсутствие автономности;
- большое время на подготовку к вылету в случае наличия отказа;
- повышенная потребная мощность противообледенительной системы;
- сложность конструкции обогрева ПВД;
- повышенный вес конструкции;
- сложность адаптации системы при изменении конфигурации носовой части фюзеляжа ЛА или к другому ЛА;
- значительная трудоемкость и высокая стоимость адаптации системы к измененной внешней конфигурации фюзеляжа ЛА или к другому ЛА;
- узкий рабочий диапазон измерения параметров полета.
Остановимся на каждом из этих недостатков более подробно.
1. Отсутствие автономности системы. Это связано с тем, что отдельные блоки и агрегаты системы распределены снаружи и внутри фюзеляжа ЛА, что значительно затрудняет поиск отказа системы.
2. Большое время на поиск отказов отдельных блоков системы (этот недостаток, по сути, следует из предыдущего). Как следствие этого, - большое время на подготовку к вылету в случае наличия отказа.
3. Повышенная потребная мощность противообледенительной системы. Это обусловлено тем, что ПВД в данной системе располагаются на фюзеляже ЛА таким образом, чтобы приемные отверстия выходили за пределы пограничного слоя и не было потерь полного давления, а так как размеры многих ЛА весьма велики, то высота стойки обычных ПВД, как правило, более 150÷200 мм. Это приводит к большим затратам мощности противообледенительной системы (до 500 Вт на каждый ПВД). На многих ЛА, например, на гражданских самолетах по международным требованиям устанавливается 3÷4 таких ПВД.
4. Сложность конструкции системы обогрева ПВД. Это обусловлено тем, что в обычно применяемых в таких системах ПВД обогрев производится с помощью специальных трубчатых электронагревателей (ТЭНов), которые проходят (наматываются) внутри ПВД, где, кроме самих электронагревателей, имеются еще и пневмотрассы, камеры статического давления и отстойники влаги.
5. Повышенный вес конструкции системы. Это обусловлено рядом обстоятельств: во-первых, большим весом ПВД (более 1 кг каждый), применяемых в таких системах, что обусловлено их большими габаритами (см. выше); во-вторых, распределенностью отдельных блоков системы по фюзеляжу, что приводит к большой длине коммуникаций, например, пневмотрасс между отдельными блоками системы. Это, в свою очередь, и приводит к возрастанию веса.
6. Сложность адаптации системы при изменении конструкции носовой части фюзеляжа. Это обстоятельство связано с тем, что ПВД в такой системе, как правило, устанавливаются на носовой части фюзеляжа. Даже при небольшой модификации носовой части фюзеляжа может весьма существенно измениться его обтекание, а следовательно, и местные (в местах установки ПВД) параметры потока и градуировочные характеристики ПВД. Для изменения градуировочных характеристик, которые находятся в памяти бортового вычислителя, необходимо провести полный цикл испытаний (в аэродинамических трубах или летных условиях) по всем возможным режимам полета (числам Маха, углам атаки, скольжения и т.д.). Затем по этим новым градуировкам построить или уточнить алгоритмы определения параметров полета и внести их в память бортового вычислителя.
7. Значительная трудоемкость и высокая стоимость адаптации системы к измененной внешней конфигурации фюзеляжа ЛА или к другому ЛА в целом, что непосредственно следует из предыдущего пункта 6.
8. Узкий рабочий диапазон измерения параметров полета. Это, в первую очередь, обусловлено узким рабочим диапазоном ПВД такого типа (до углов атаки |α|≤30°). Но даже при использовании ПВД штырькового типа при их надлежащей установке и количестве до четырех штук на носовой части фюзеляжа диапазон измерения параметров полета может быть расширен до углов атаки -90°≤∝ ≤90° и скольжения -90°≤β≤90°, то есть измерение параметров полета может производиться во всей передней полусфере. При полете назад обслуживание задней полусферы в этом случае затруднено из-за влияния отрывных зон и толстого пограничного слоя, идущего с задней части ЛА. Однако, для ряда задач в современной авиации требуется существенно больший диапазон измерения параметров полета: вся передняя и задняя полусфера.
Задачей изобретения является устранение перечисленных выше недостатков.
Технический результат заключается в следующем:
- обеспечение автономности системы;
- сокращение времени на подготовку к вылету в случае обнаружения наличия отказа системы;
- снижение потребной мощности противообледенительной системы;
- упрощение конструкции системы обогрева ПВД;
- снижение веса конструкции системы измерения воздушных параметров в целом;
- упрощение адаптации системы к измененной внешней конструкции фюзеляжа ЛА или к другому ЛА;
- снижение трудоемкости и стоимости адаптации системы к измененной внешней конфигурации фюзеляжа ЛА или другому ЛА;
- расширение рабочего диапазона измерения параметров полета вплоть до углов атаки -180°≤α≤ 180° и скольжения -180°≤β≤180°, то есть во всей сфере.
Технический результат достигается тем, что система измерения воздушных параметров полета, состоящая из таких блоков и агрегатов, как приемники воздушных давлений с приемными отверстиями, снабженные электронагревательной противообледенительной системой, соединенные пневмотрассами с датчиками давления, датчики температуры наружного воздуха и вычислитель параметров полета, выполнена таким образом, что все перечисленные блоки и агрегаты размещены в одном специальном аэродинамически обтекаемом корпусе, крепящемся к ЛА и составленном из элементов осесимметричных тел, выполненных, например, в форме конуса, эллипсоида, цилиндра, пирамиды, а сама система измерения воздушных параметров полета является автономной и сообщается с ЛА и его системами только каналами передачи информации и подвода электроэнергии через электрические разъемы.
Для повышения степени автономности системы измерения воздушных параметров в ее корпусе размещены и блоки электропитания, и система является автономной и по электропитанию.
Для расширения рабочего диапазона измерения, уменьшения веса конструкции, уменьшения потребного количества каналов измерения давления система измерения воздушных параметров полета снабжена ПВД, выполненными в виде выступающих над корпусом многореберных стержней, между ребрами которых расположены приемные отверстия.
Для конкретного типа ЛА с целью снижения веса конструкции, потребной мощности противообледенительной системы и стоимости в системе измерения параметров полета число приемников давления в виде многореберных стержней составляет от одного до четырех.
Для упрощения конструкции системы обогрева ПВД в системе измерения воздушных параметров полета электронагреватели противообледенительной системы ПВД могут быть расположены внутри корпуса системы.
Для повышения степени автономности системы измерения воздушных параметров полета, сокращения времени на подготовку к вылету в случае обнаружения наличия отказа в системе, упрощения адаптации системы к изменению внешней конструкции фюзеляжа ЛА или к другому ЛА, снижения трудоемкости и стоимости адаптации системы к измененной внешней конфигурации фюзеляжа ЛА или к другому ЛА, а также для расширения рабочего диапазона измерения параметров полета датчики температуры наружного воздуха системы расположены внутри термоизолированного от других блоков и агрегатов отсека, сообщающегося с наружным воздухом с помощью дренажных отверстий в корпусе.
Для снижения потребной мощности противообледенительной системы, упрощения конструкции системы измерения воздушных параметров полета поверхность корпуса или ее часть может быть выполнена из гидрофобного материала.
Для расширения рабочего диапазона измерения параметров полета до углов атаки -180°≤α ≤180° и скольжения -180°≤β≤180° (т.е. во всей сфере) система может состоять из нескольких самостоятельных подсистем, в каждой из которых все блоки и агрегаты размещены в отдельных аэродинамически обтекаемых корпусах, крепящихся к элементам ЛА, а сами подсистемы измерения воздушных параметров полета являются автономными и сообщаются с ЛА и его системами, а также между такими же подсистемами только каналами передачи информации и подвода электроэнергии.
Для повышения надежности измерений система измерения воздушных параметров полета снабжена интерфейсным устройством и разъемом для подключения к шине обмена данных с другими аналогичными подсистемами, что позволяет объединить их в многоканальный комплекс.
Для расширения диапазона и повышения точности измерений при одновременном уменьшении веса конструкции система измерения воздушных параметров полета может состоять из двух подсистем, корпус каждой из которых является аэродинамически обтекаемым осесимметричным телом и снабжен двумя ПВД, выполненными в виде многореберных стержней, причем число отверстий в каждом ПВД равно шести, а оси приемников направлены по нормали к поверхности корпуса и развернуты друг относительно друга в поперечном сечении корпуса на угол ϕ=86÷96°.
Для уменьшения веса и стоимости системы измерения воздушных параметров полета число отверстий на каждом ПВД может быть равно пяти.
Для уменьшения веса и расширения диапазона измерений воздушных параметров полета система может состоять из двух подсистем, на корпусах которых с боковых сторон, внешних по отношению к ЛА, располагаются по два многореберных штырьковых ПВД, число приемных отверстий на каждом из которых может изменяться от пяти до шести, а оси приемников направлены по нормали к поверхности корпуса и составляют с плоскостью, проходящей через продольную ось корпуса и параллельной строительной горизонтали, углы на каждом из корпусов ψ=+(43÷48)° и ψ=-(43÷48)°.
Для случая, когда, например, на ЛА (вертолете) нет крыла, каждая из двух подсистем на одной боковой стороне может иметь пилоны для крепления к фюзеляжу ЛА.
Для более узкого потребного диапазона измерения параметров полета может быть употреблена такая система, что каждая из входящих в нее подсистем снабжена одним ПВД в виде многореберного стержня, а оси ПВД направлены по нормали к поверхности корпуса.
В частном случае в такой системе оси ПВД могут располагаться в плоскости, параллельной плоскости, проходящей через строительную горизонталь, и нормальной к плоскости симметрии ЛА.
Поскольку в предложенной системе все ее элементы и агрегаты собраны в едином корпусе, а не распределены по поверхности фюзеляжа и внутри него, как у системы-прототипа, то предлагаемая система является автономной и сообщается с другими системами только по каналам обмена и каналу электропитания. Это значительно облегчает поиск отказов в системе и сокращает время на их поиск. Кроме того, так как предложенная система является автономной, все ее агрегаты размещены в едином специальном аэродинамически обтекаемом корпусе, крепящемся к ЛА и составленном из элементов осесимметричных тел, выполненных, например, в форме конуса, эллипсоида, цилиндра, пирамиды. Система измерения параметров полета сообщается с ЛА и его системами только каналами информации и подвода энергии, то есть через электрический разъем. Это позволяет при наличии отказа всю неисправную систему полностью отстыковать от элемента ЛА, а на ее место поставить другую, такую же систему, но исправную. Тем самым существенно сокращается время на подготовку к вылету в случае наличия отказа в системе. При настоящем уровне развития техники все блоки и агрегаты системы, по оценкам, в зависимости от количества каналов измерения могут быть размещены в корпусе диаметром 100÷200 мм и длиной 400÷700 мм. Пограничный слой на таком теле даже при очень малых скоростях (V=5 м/с) составляет 3÷5 мм, что в 40÷60 раз меньше, чем, например, на фюзеляже современного магистрального самолета при существенно большей посадочной скорости (70 м/с). Таким образом, для того чтобы избежать потерь полного давления, ПВД, устанавливаемые на корпусе предлагаемой системы, могут быть существенно меньше по габаритам, в частности по высоте, а следовательно, и по массе (в десятки раз). А поскольку потребная мощность на обогрев пропорциональна омываемой площади, то в результате потребная мощность на обогрев ПВД в такой системе снижается во много раз (это верно, строго говоря, при той же структуре обтекания тела). А поскольку масса и размеры ПВД, устанавливаемых на корпусе предлагаемых систем, весьма малы, то система их обогрева - электронагреватели могут быть размещены внутри корпуса таким образом, что обогрев будет осуществляться за счет теплопередачи по телу ПВД ("по принципу паяльника"), в отличие от прототипа, где ТЭНы размещаются внутри самих ПВД. Тем самым существенно снижается вес конструкции. Кроме того, в результате существенного уменьшения габаритов, массы ПВД и потребной мощности (а следовательно, и массы) электронагревателей весьма существенно может быть снижен и вес всей конструкции системы. Так, вес одного ПВД магистрального самолета с системой обогрева составляет 1,2÷1,5 кг, в то время как для данной системы он, по разным оценкам, может составить 100÷200 г. Следует отметить, что вес в предлагаемой системе по сравнению с прототипом существенно снижается также из-за коротких коммуникаций между отдельными блоками системы (например, длины пневмотрасс могут быть снижены в сотни раз). Вследствие того, что система измерения воздушных параметров полета выполнена в виде автономной системы, на собственном корпусе которой размещены приемные отверстия для восприятия давления или ПВД, то существенно упрощается адаптация этой системы при изменении конфигурации отдельных элементов ЛА или для других ЛА. Например, при установке системы в виде двух отдельных блоков на концах крыла ЛА изменение конфигурации или появление различных надстроек на фюзеляже практически не скажется на градуировочных характеристиках системы. Кроме того, система в виде одной или нескольких подсистем может располагаться на пилонах на достаточном удалении от элементов ЛА. Это значительно ослабляет воздействие элементов ЛА на местные параметры потока в местах, где расположены приемные отверстия для восприятия давления на корпусе или ПВД системы. В результате в ряде случаев вообще нет необходимости проводить повторные градуировочные испытания, например, при установке блоков системы на крыле, когда изменилась внешняя конфигурация фюзеляжа. Кроме того, при вынесении системы на пилонах от элементов ЛА не требуется проведения градуировок системы совместно с ЛА, а необходимо лишь провести измерения параметров потока в местах ее установки, что даст некоторые отдельные поправочные коэффициенты. Все это приводит к заметному снижению трудоемкости и стоимости системы при ее адаптации к измененной внешней конфигурации фюзеляжа ЛА или к другому ЛА. Предложенная система позволяет существенно расширить рабочий диапазон измерения параметров полета вплоть до углов атаки -180° ≤α≤180° и скольжения - 180°≤β≤180°, то есть во всей сфере. Действительно, предлагаемая система, особенно при разбивке ее на подсистемы, позволяет распределить вокруг ЛА чувствительные элементы ПВД таким образом, что измерения можно проводить во всей пространственной сфере, т.е. при -180°≤α≤180° и -180°≤β≤180°, и, что весьма важно, при достаточно малом количестве таких ПВД. Так, например, в случае реализации системы в виде двух подсистем, установленных по концам крыла с двумя многореберными ПВД с шестью или пятью отверстиями для восприятия давления на каждом из корпусов подсистем, имеется возможность вычислить все параметры полета при любых углах атаки α и скольжения β. Это обусловлено следующими обстоятельствами. Во-первых, тем, что пограничные слои на корпусах подсистем являются весьма тонкими, и, например, при полете вперед или назад все отверстия ПВД выступают за пограничный слой. Во-вторых, при любом направлении полета (вперед-назад, вправо-влево, вверх-вниз или каком-либо промежуточном) имеется возможность алгоритмически из показаний четырех ПВД отобрать два, в местах установки которых на корпусах подсистем реализуется безотрывное обтекание. По показаниям этих двух ПВД на основе заранее полученных градуировочных зависимостей возможно восстановить все воздушные параметры полета (все три компоненты скорости, а следовательно, и углы α, β, высоту полета и т.д.).
Для повышения степени автономности система может быть снабжена собственным блоком электропитания, а также блоком датчиков температуры наружного воздуха, расположенных внутри корпуса в специальном термоизолированном от других блоков и агрегатов отсеке, сообщающемся с наружным воздухом с помощью дренажных отверстий в корпусе. Для дополнительного снижения потребной мощности противообледенительной системы, упрощения конструкции системы обогрева ПВД и снижения веса конструкции система измерения воздушных параметров полета может быть снабжена ПВД в виде многореберных стержней, между ребрами которых расположены приемные отверстия, выступающие над корпусом. В зависимости от требований по диапазону измерений и отказозащищенности число таких ПВД может изменяться от одного до четырех. Так как размеры таких приемников малы, то для упрощения конструкции электронагреватели ПВД могут быть размещены внутри корпуса системы. Для дополнительного снижения потребной мощности противообледенительной системы, а также для повышения точности измерения поверхность корпуса системы или ее часть может быть выполнена из гидрофобного материала.
Для упрощения адаптации системы к изменению внешней конструкции фюзеляжа ЛА или к другим ЛА, снижения трудоемкости и стоимости адаптации системы, расширения рабочего диапазона измерения параметров полета вплоть до углов атаки -180°≤ α≤180° и скольжения -180°≤β≤180° (то есть во всей сфере) система измерения воздушных параметров полета может состоять из нескольких самостоятельных подсистем, в каждой из которых все блоки и агрегаты размещены в отдельных аэродинамически обтекаемых корпусах, крепящихся к элементам ЛА, а сами подсистемы измерения воздушных параметров полета являются автономными и сообщаются с ЛА и его системами, а также между такими же подсистемами только каналами передачи информации и подвода энергии. В частности, система может состоять из двух подсистем с ПВД в виде многореберных стержней, число отверстий в которых может меняться от пяти до шести, а оси которых направлены по нормали к внешней поверхности корпуса. При установке на корпусах каждой из таких подсистем двух указанных ПВД, развернутых друг относительно друга на угол ϕ=86÷96° таким образом, что крепежные узлы, расположенные на одной из сторон корпусов, подсоединяются, например, к концам крыла так, что продольные оси подсистем параллельны плоскости симметрии ЛА, а приемники составляют с плоскостью, ортогональной плоскости симметрии ЛА и проходящей через строительную горизонталь, угол ψ=43°÷48°. В результате появляется дополнительная возможность производить измерения во всем диапазоне углов -180°≤α≤180° и -180°≤β≤180°, так как среди четырех ПВД можно выбрать всегда два таких, которые находятся в безотрывной зоне и за счет которых на основе заранее проведенных градуировок возможно по местным параметрам потока, измеренным в местах установки ПВД, определять истинные параметры полета ЛА. Если на фюзеляже ЛА нет крыла, эти корпуса подсистем могут быть вынесены на специальных пилонах относительно фюзеляжа в относительно "чистый" поток. Для более узкого потребного диапазона измерения параметров полета могут быть употреблены подсистемы с одним многореберным ПВД на каждом из корпусов.
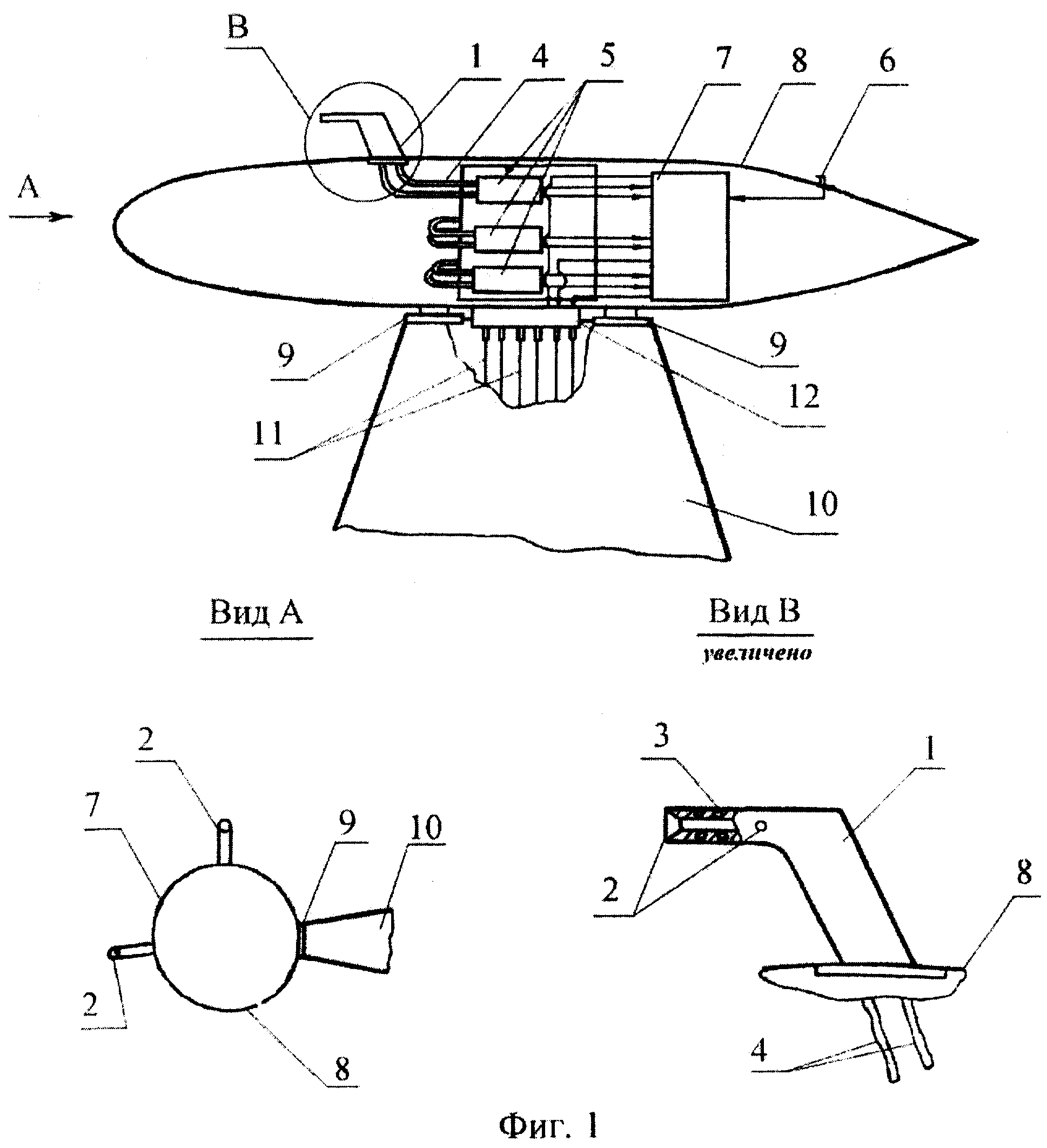
На фиг.1 изображен один из возможных вариантов системы измерения воздушных параметров полета.
На фиг.2 показан вариант системы с размещенным в ее корпусе блоком электропитания.
На фиг.3 показан вариант системы, снабженной ПВД в виде многореберных стержней, между ребрами которых расположены приемные отверстия, выступающие над корпусом.
На фиг.4÷7 показаны варианты системы с разным количеством ПВД в виде многореберных стержней.
На фиг.8 показан вариант системы с электронагревателями ПВД, расположенными внутри корпуса системы.
На фиг.9 показан вариант системы с датчиками температуры наружного воздуха, расположенными внутри корпуса в специальных термоизолированных от других блоков и агрегатов отсеках, сообщающихся с наружным воздухом с помощью дренажных отверстий в корпусе.
На фиг.10, 11 изображены варианты исполнения системы для случая, когда на поверхности корпуса имеется гидрофобное покрытие.
На фиг.12, 13 показаны варианты исполнения системы в виде нескольких подсистем, в каждой из которых агрегаты размещены в едином специальном аэродинамически обтекаемом корпусе с отверстиями для восприятия давления, крепящемся к элементу ЛА, а сама подсистема измерения воздушных параметров полета является автономной и сообщается с ЛА и его подсистемами, а также между такими же подсистемами только каналами передачи информации и подвода электроэнергии.
На фиг.14 показан вариант системы, состоящей из двух подсистем, корпус каждой из которых является аэродинамически обтекаемым телом и снабжен двумя ПВД в виде многореберных стержней с числом приемных отверстий в каждом ПВД, равном шести, а оси приемников воздушного давления направлены по нормали к корпусу и развернуты друг относительно друга в поперечном сечении корпуса на угол ϕ=86-96°.
На фиг.15 изображен вариант системы, отличающийся от изображенного на фиг.14 наличием пяти приемных отверстий на каждом из ПВД.
На фиг.16 показан вариант системы, состоящей из двух подсистем, каждая из которых имеет крепежные узлы, расположенные на одной боковой стороне корпуса и с помощью которых подсистемы крепятся к концам крыла таким образом, что ПВД расположены с другой стороны корпусов подсистем и составляют с плоскостью, проходящей через продольную ось корпуса и параллельной строительной горизонтали, углы ψ=+(43÷48)° и ψ =-(43÷48)°.
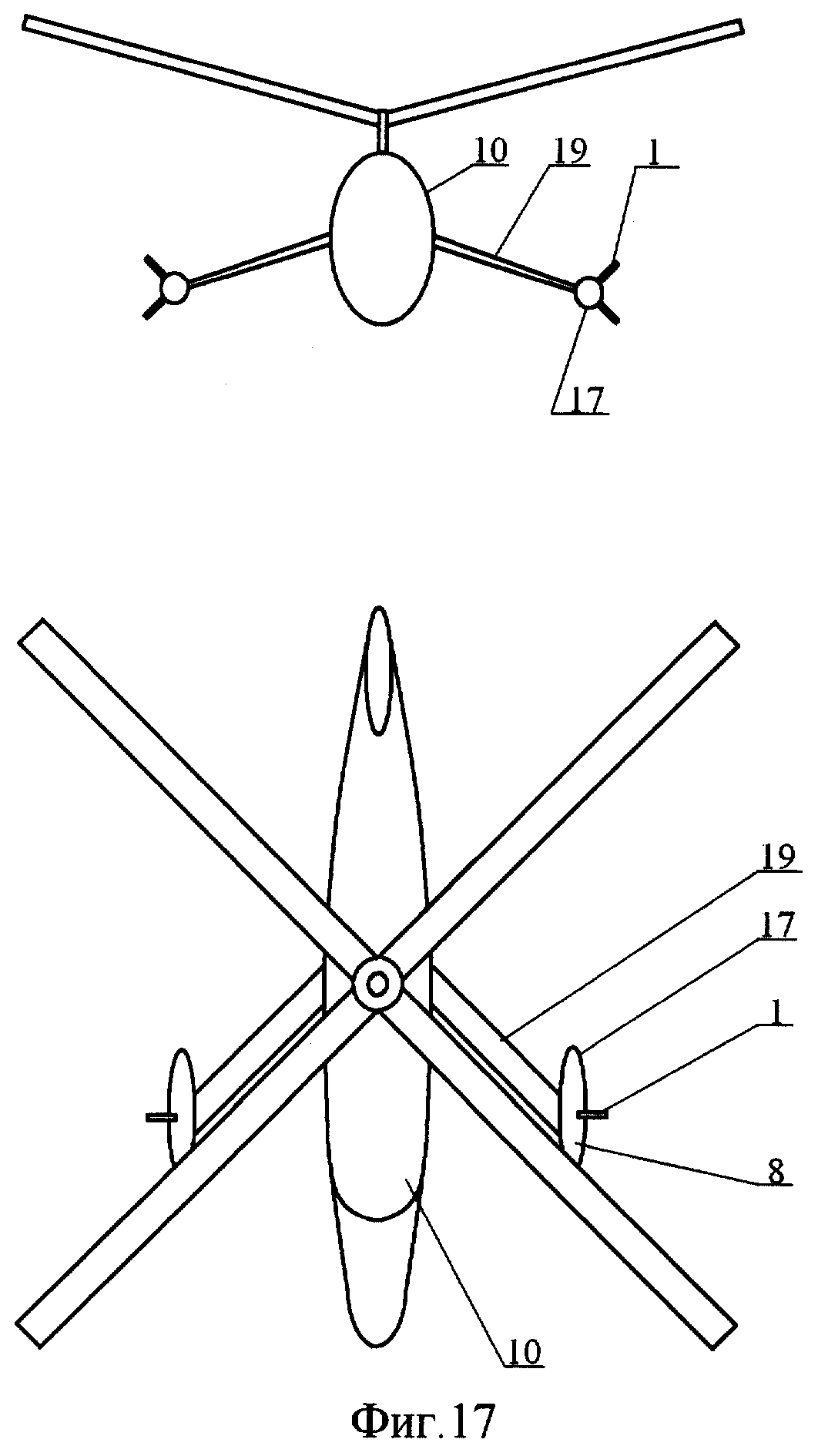
На фиг.17 показана система, отличающаяся от изображенной на фиг.16 тем, что корпуса каждой из двух подсистем на одной боковой стороне имеют пилоны, с помощью которых они крепятся к фюзеляжу ЛА.
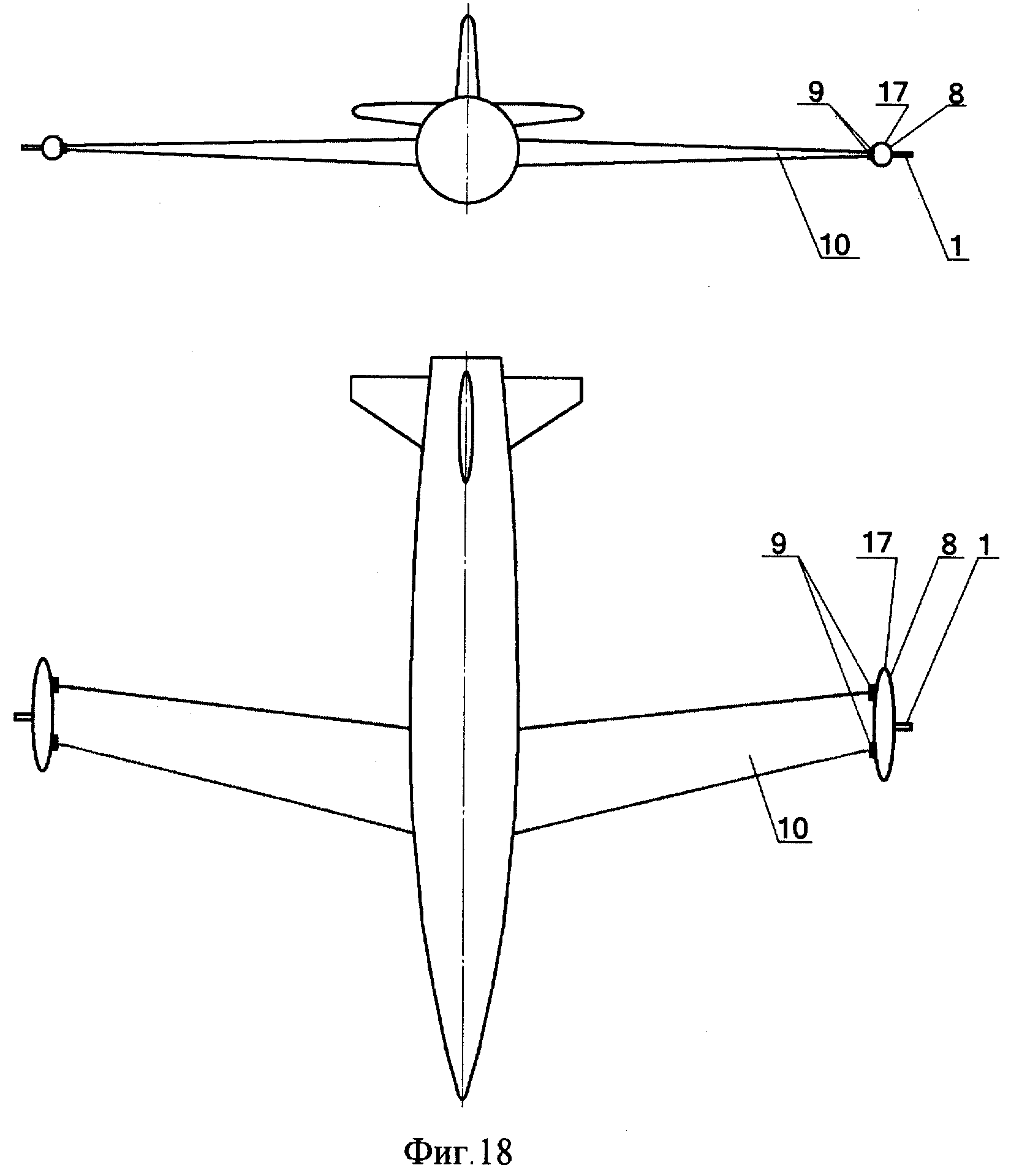
На фиг.18 изображена система измерения воздушных параметров в которой каждая подсистема снабжена одним ПВД в виде многореберного стержня, число приемных отверстий в которых может изменяться от пяти до шести, а оси ПВД направлены по нормали к поверхности корпуса.
На фиг.19 изображена система измерения воздушных параметров полета, отличающаяся от изображенных на фиг.16, 18 тем, что оси ПВД располагаются в плоскости, параллельной плоскости, проходящей через строительную горизонталь, и нормальной к плоскости симметрии ЛА.
Система измерения воздушных параметров полета состоит из ПВД 1 с приемными отверстиями 2, снабженных электронагревательной противообледенительной системой 3, соединенных пневмотрассами 4 с датчиками давления 5, датчиков температуры 6 наружного воздуха и вычислителя 7. Все перечисленные агрегаты размещены в едином специальном аэродинамически обтекаемом корпусе 8, крепящемся с помощью узлов подвески 9 к элементу 10 ЛА. Сама система является автономной и сообщается с ЛА и его системами только каналами передачи информации и подвода электроэнергии 11 через разъемы 12.
Система измерения воздушных параметров полета работает следующим образом (фиг.1).
Давления, воспринимаемые отверстиями 2 приемников давления 1, передаются по пневмотрассам 4 к датчикам давления 5. Для предотвращения обледенения, закупорки отверстий и влияния наросшего льда на измерения ПВД снабжены противообледенительной нагревательной системой 3. В блоке датчиков 5 давления преобразуются в электрические сигналы, которые посылаются в вычислитель 7.
Электрические сигналы от датчиков 6 температуры наружного воздуха также подаются в вычислитель 7, в котором по заранее полученным градуировочным зависимостям и построенным по ним алгоритмам определяются параметры потока (полета): полное и статическое давление, углы атаки и скольжения, а также все производные от них функции.
Для повышения степени автономности в корпусе 8 системы измерения воздушных параметров полета (фиг.2) могут быть размещены блоки электропитания 13, которые по каналам 14 обеспечивают работу блока датчиков 5 и вычислителя 7.
Для расширения рабочего диапазона измерения, уменьшения потребного количества каналов измерения и уменьшения веса конструкции система измерения воздушных параметров полета может быть снабжена (фиг.3) ПВД в виде многореберных стержней 1, между ребрами которых расположены приемные отверстия 2, выступающие над корпусом 8.
В зависимости от требований по диапазону измерений и отказозащищенности число таких ПВД может изменяться от одного до четырех (фиг.4-7).
Для упрощения конструкции электронагреватели 3 приемников воздушного давления 1 могут быть размещены внутри корпуса 8 системы (фиг.8).
Для упрощения конструкции и повышения точности измерения датчики 6 температуры наружного воздуха могут располагаться в специальных термоизолированных от других блоков и агрегатов отсеках 14, сообщающихся с наружным воздухом с помощью дренажных отверстий 15 в корпусе 8 (фиг.9).
Для дополнительного снижения мощности, потребляемой противообледенительной системой, а также для повышения точности измерения поверхность корпуса 8 системы или ее части может быть выполнена из гидрофобного материала или покрытия. Варианты зон на корпусе 8 с гидрофобным покрытием 16 показаны на фиг.10 и 11.
Для повышения надежности измерений, упрощения адаптации системы к изменению внешней конструкции фюзеляжа ЛА или к другим ЛА, снижения трудоемкости и стоимости адаптации, расширения диапазона измерения параметров полета вплоть до углов атаки -180°≤α≤180° и скольжения -180°≤β≤180° (то есть во всей сфере) система измерения воздушных параметров полета может состоять из самостоятельных подсистем 17 (фиг.12, 13), в каждой из которых агрегаты размещены в едином аэродинамически обтекаемом корпусе, крепящемся к элементу ЛА, а сама подсистема 17 измерения воздушных параметров полета является автономной и сообщается с ЛА и его системами, а также такими же подсистемами только каналами 11 (фиг.1 и 2) передачи информации и подвода энергии.
Для упрощения и уменьшения веса система, в частности, может состоять (фиг.14-19) из двух подсистем 17 с ПВД в виде многореберных стержней 1 с числом приемных отверстий 2 в каждом ПВД, равным шести, а оси приемников воздушного давления направлены по нормали к корпусу 8 и развернуты друг относительно друга в поперечном сечении на угол ϕ=86÷96° (фиг.14).
Для упрощения, уменьшения веса и удешевления конструкции система измерения параметров полета, состоящая из двух подсистем 17, может содержать приемники воздушного давления, с числом отверстий в каждом из них, равным пяти (фиг.15, поз. 1, 2).
Для уменьшения веса и расширения диапазона измерений система может состоять из двух подсистем 17 (фиг.16), на которых с боковых сторон корпуса, внешних по отношению к ЛА, расположены по два многореберных штырьковых ПВД 1, число приемных отверстий 2 на каждом из которых может изменяться от пяти до шести. При этом оси приемников направлены по нормали к поверхности корпуса 8 и составляют с плоскостью 18, параллельной строительной горизонтали, углы ψ=+(43÷48)° и ψ=-(43÷48)°
Для случая, когда, например, на ЛА (вертолете) нет крыла, каждая из двух подсистем 17 на одной боковой стороне может иметь пилоны 19 для крепления к фюзеляжу ЛА (фиг.17).
Для более узкого потребного диапазона измерения параметров полета может быть употреблена такая система, в которой каждая из подсистем 17 снабжена одним ПВД в виде многореберного стержня, а оси приемников 1 воздушного давления направлены по нормали к поверхности корпуса 8 (фиг.18).
В частном случае такой системы оси приемников воздушного давления 1 могут располагаться в плоскости 18 параллельно плоскости, проходящей через строительную горизонталь, и нормальной к плоскости симметрии ЛА (фиг.19).
Реферат
Изобретение относится к области авиации и, в частности, к определению воздушных параметров полета летательных аппаратов. Устройство содержит приемники воздушных давлений с приемными отверстиями, снабженные электронагревательной противообледенительной системой, соединенные пневмотрассами с датчиками давления, датчики температуры наружного воздуха и вычислитель параметров полета. При этом все блоки размещены в одном специальном аэродинамически обтекаемом корпусе, крепящемся к ЛА и составленном из элементов осесимметричных тел, которые могут быть выполнены в форме конуса, эллипсоида, цилиндра, пирамиды. При этом устройство является автономным и сообщается с ЛА и его системами только каналами передачи информации и подвода электроэнергии через электрические разъемы. Технический результат заключается в обеспечении автономности системы, сокращении времени на подготовку к вылету в случае обнаружения наличия отказа системы, снижении потребной мощности противообледенительной системы, упрощении конструкции системы обогрева ПВД, снижении веса конструкции системы измерения воздушных параметров в целом, снижении трудоемкости и стоимости, а также упрощении адаптации системы к измененной внешней конструкции фюзеляжа ЛА или к другому ЛА, расширении рабочего диапазона измерения параметров полета вплоть до углов атаки -180°≤α≤180° и скольжения -180°≤β≤180°, то есть во всей сфере. 13 з.п. ф-лы, 19 ил.
Комментарии