Способ и устройство для приготовления и дозирования кофе - RU2660051C2
Код документа: RU2660051C2
Чертежи








Описание
Область техники, к которой относится изобретение
Изобретение относится к способу приготовления кофе различных видов в дозирующем устройстве и дозирующему устройству, предназначенному для осуществления такого способа.
Уровень техники
С целью упрощения описания делается ссылка только на кофе, но, в общем, настоящее изобретение относится любому напитку, который приготавливается посредством настаивания вещества в виде порошка или частиц, такого как чай, травяной чай и т.п., с водой или другой жидкостью для настаивания.
Известны машины для дозирования напитков, в частности, кофе и напитка такого рода, имеющие дозирующее устройство для приготовления кофе, где молотый кофе отмеряется и поступает самотеком в камеру настаивания, после чего он прессуется одной или несколькими подвижными стенками, обычно одним и несколькими поршнями. Затем жидкость для настаивания, обычно вода, принудительно подается через кофейную таблетку в камеру настаивания с целью экстракции молотого продукта и приготовления напитка.
Количество кофейного порошка, которое должно оседать внутри камеры для настаивания, зависит от вида приготавливаемого напитка: например, для приготовления эспрессо требуется намного меньше количество молотого кофе по сравнению с количеством кофе, необходимым для приготовления так называемого кофе «американо». Молотый кофе подается самотеком в камеру настаивания и имеет тенденцию к беспорядочному оседанию внутри камеры: в случае малого количества кофе должны быть предусмотрены небольшие камеры с целью приготовления напитков, имеющих приемлемые качества. Таким образом, существуют дозирующие машины, которые имеют две камеры настаивания и должны использоваться на основе количества кофе, подлежащего дозированию в камере настаивания, одну камеру с большими размерами для приготовления больших количеств кофе и одну камеру с меньшими размерами для приготовления напитков из меньшего количества кофейного порошка, помещенного в камеру, например, кофе «ристретто» и «эспрессо».
Однако такое решение является дорогостоящим для изготовления и требует дополнительного пространства в дозирующей машине. Кроме того, наличие двух камер настаивания значительно увеличивает расходы на техническое обслуживание машины.
Дополнительные известные проблемы дозирующих узлов относятся к повторяемости качества напитков применительно ко всем экстракциям.
В частности, во время этапа «смачивания» (или «предварительного настаивания) внутри кофейной таблетки образуются предварительные траектории, по которым жидкость для настаивания может проходить через таблетку более легко при соответствующем неоптимальном смачивании кофе и ненадлежащей экстракции веществ из молотого кофе.
Кроме того, следует принять во внимание, что в некоторых машинах изменения их рабочих параметров предусматривается на основе давления, определяемого на поршне, который прессует кофейный порошок. Неравномерное распределение кофейного порошка внутри камеры настаивания или трения, возникающие из-за перемещений, могут привести к неточному считыванию давления, действующего во время прессования кофе.
Дополнительные недостатки, вызываемые неравномерным распределением кофейного порошка, могут вызвать увеличенный износ поршня, который спрессовывает кофейный порошок, с последующим увеличением трения, что может привести не только к неправильному считыванию давления прессования таблетки, но также и к повреждениям самого поршня.
Сущность изобретения
Задача настоящего изобретения состоит в том, чтобы устранить вышеуказанные проблемы и предложить способ и экстрагирующее устройство для приготовления кофе, которые позволяют выполнять настаивание с оптимальным и воспроизводимым качеством приготавливаемого напитка независимо от количества кофейного порошка, подаваемого в камеру настаивания. В частности, задача настоящего изобретения состоит в том, чтобы предложить устройство, в котором камера настаивания могла бы служить для приготовления напитков с самыми разными объемами, например, ристретто объемом 25 см3 в сравнении с кофе американо объемом более 230 см3 или 12 жидкостных унций (приблизительно 350 см3).
Эти и другие задачи решаются с помощью настоящего изобретения, которое относится к способу приготовления кофе по п. 1 формулы изобретения. В частности, способ по изобретению предлагает использование дозирующего устройства, имеющего опорную раму, цилиндрическую камеру настаивания с предпочтительно вертикальной осью, которая установлена на опорной раме и может поступательно перемещаться относительно рамы в направлении, параллельном оси камеры настаивания, и загрузочный лоток, установленный на опорной раме. Загрузочный лоток может вращаться относительно рамы для подачи молотого кофе в камеру настаивания, и он расположен над камерой настаивания во время, по меньшей мере, части этапов приготовления напитка. Этот способ включает в себя следующие этапы:
а) приготовление и подачу в камеру настаивания через загрузочный лоток порции молотого кофе на основе выбора дозирования, выполняемого пользователем; b) прессование порции кофе внутри камеры настаивания; и с) подачу нагретой воды в камеру настаивания для приготовления и дозирования кофе.
В частности, перед этапом а) и/или во время этого этапа подвижная камера настаивания и/или загрузочный лоток расположены относительно друг друга как функция количеств молотого кофе в порции, которая должна быть помещена внутри камеры настаивания. В частности, способ по изобретению отличается этапами идентификации вида напитка, выбранного пользователем, определения положений вышеуказанной камеры, поршня, который перемещается вдоль камеры, и загрузочного лотка, и проверки, соответствуют ли эти положения положениям, хранящимся в памяти устройства в качестве положений, относящихся к напитку, подлежащему дозированию; изменения положения камеры, так чтобы она достигала соответствующего сохранного в памяти положения для выбранного напитка; подачи требуемого количества молотого кофе или другого ингредиента и дозирования напитка, выбранного пользователем. Как подробно описано ниже, положение камеры непосредственно связано с угловым положением лотка, тем самым, в описанном здесь способе это является достаточным для определения положения камеры настаивания, которая также должна определять положение лотка. Кроме того, положение нижнего поршня может быть получено из положения камеры настаивания и уровня развития способа, т.е. из информации о ранее выполненных этапах способа.
В целях настоящего изобретения под термином «определение положения нижнего поршня» подразумевается возможность, в отношении определенного компонента, прямого или косвенного определения положения, в котором находится вышеуказанный компонент, т.е., например, посредством отслеживания электрического перемещения второго компонента, механически соединенного с первым компонентом.
Предметом настоящего изобретения также является устройство для приготовления и дозирования кофе, содержащее: опорную раму, цилиндрическую камеру настаивания по существу, с вертикальной осью, т.е. вертикальной или немного наклоняемой под углом менее 10 градусов, предпочтительно, менее 5 градусов и более предпочтительно менее 3 градусов относительно вертикали; камера настаивания установлена на опорной раме и может перемещаться поступательно относительно вышеуказанной рамы в направлении, параллельном оси камеры настаивания; загрузочный лоток, установленный на опорной раме, расположенный над камерой настаивания и способный вращаться относительно самой рамы для подачи молотого кофе в камеру настаивания.
Устройство для приготовления и дозирования кофе содержит средство для размещения подвижной камеры настаивания, нижний поршень и/или загрузочный лоток относительно друг друга как функцию количества молотого кофе в виде порции, которая должна быть помещена внутри камеры настаивания, с целью максимально равномерного распределения материала, прежде чем материал будет спрессован на этапе, который предшествует настаиванию.
По изобретению подвижная камера настаивания имеет поршень, образующий нижнюю стенку камеры; если необходимо, поршень перемещается в камере для изменения объема самой камеры. Предпочтительно, для каждого дозирования расстояние нижней стенки камеры настаивания от верхнего края камеры настаивания также задается как функция количества молотого кофе в виде порции, которая должна быть помещена внутри камеры.
Согласно варианту настоящего изобретения загрузочный лоток может свободно вращаться относительно оси, перпендикулярной оси поступательного перемещения камеры настаивания, и положение лотка регулируется с помощью соответствующих криволинейных поверхностей, относящихся к камере настаивания и самому лотку.
В частности, способ предусматривает перемещение камеры, ее поршня и лотка из стандартного исходного положения (обозначенного координатами h1, h2 и α, где h1 - расстояние камеры от верхнего основания рамы, h2 - расстояние нижнего поршня от верхнего края камеры настаивания, и α - угол наклона лотка) и, по меньшей мере, одно окончательное положение, с помощью которого обеспечивается равномерное распределение кофе в камере. Вышеуказанное, по меньшей мере, одно окончательное положение (также выраженное координатами h1, h2 и α) сохраняется в блоке управления в форме «карты», предварительно полученной в экспериментальном порядке; на вышеуказанной карте хранятся окончательные положения (координаты h1, h2 и α положений, которых должны достигать камера поршень и лоток), относящиеся к группе предварительно заданных количеств кофе, в общем, соответствующих необходимому количеству кофе для приготовления одного или нескольких напитков. Такие значения сохраняются в памяти с возможностью их считывания блоком управления.
Другими словами, способ предлагает экспериментальное определение положений камеры настаивания, ее нижнего поршня и лотка (выраженных в координатах h1 h2 и α), что обеспечивает улучшенное распределение слоя кофе в камере настаивания, т.е. максимально равномерное распределение. Было подтверждено, что равномерное распределение соответствует улучшенному дозированию напитка из известного и предварительно заданного количества молотого кофе. Положения, выраженные в виде координат, сохраняются в памяти как координаты, относящиеся к вышеуказанному количеству молотого кофе.
Во время дозирования напитка блок управления изменяет значения h1, h2 и α с текущих значений, например, относящихся к положению готовности, на значения, хранящиеся как значения, адаптированные для напитка, подлежащего дозированию; далее камера, нижний поршень и лоток перемещаются в положение h1, h2 и α, хранящееся в памяти и относящееся к напитку, выбранному пользователем; молотый кофе подается в камеру в предложенном положении и затем прессуется до получения формы таблетки, в общем, перед настаиванием с использование горячей воды.
Благодаря этому решению прессование, которому подвергается кофе перед настаиванием, позволяет всегда получать таблетку, по существу, равномерной плотности, т.е. максимально равномерную, в камере настаивания.
С помощью экспериментальных испытаний было установлено, что для обеспечения надлежащего прессования достаточно, чтобы конус молотого кофе, оседающего в камере настаивания, достигал максимальной высоты от основания камеры нагнетания в центре вышеуказанного основания, так чтобы во время прессования зерна молотого кофе распределялись внутри камеры прессования, по существу, с равномерной плотностью.
Координаты h1, h2 и α, соответствующие положению, в котором определяется количество x молотого кофе с размером зерна z, например, количество, которое необходимо для приготовления напитка y и после подачи в камеру настаивания приобретающее форму конуса с вершиной на оси камеры или рядом с осью камеры, в дальнейшем сохраняются в памяти в качестве координат, соответствующих выбранному напитку.
То же самое выполняется для других напитков, которые должно дозировать устройство, что позволяет создать карту возможных решений. Экспериментально полученные данные затем могут быть обработаны для получения функции или алгоритма, которые позволяют получать координаты h1, h2 и α различных типов, начиная с количества молотого вещества и его размера зерна.
В способе приготовления после задания объема камеры настаивания во время оседания молотого кофе сама камера и/или загрузочный лоток располагаются в одном или нескольких положениях, хранящихся на карте, так что в конце размещения этих компонентов осевший кофейный порошок будет достигать максимальной высоты конуса осевшего порошка, по существу, в центре камеры настаивания, и это имеет место для каждого количества, предусмотренного для порции, определяемой выбором пользователя.
По настоящему изобретению подвижная камера настаивания имеет, по меньшей мере, одну стенку в виде нижнего поршня для изменения объема камеры и ее регулирования перед каждым дозированием в качестве функции количества молотого кофе в виде порции, которая должна быть помещена внутрь камеры.
Согласно другому варианту настоящего изобретения загрузочный лоток свободно вращается относительно оси, перпендикулярной оси поступательного перемещения камеры настаивания (необязательно пересекающейся с осью поступательного перемещения), и криволинейные поверхности, относящиеся к загрузочному лотку и камере настаивания, обеспечивают их взаимное позиционирование.
Предметом настоящего изобретения также является компьютерная программа, содержащая коды, выполняемые компьютером для оптимизации распределения кофейного порошка или другого материала в камере настаивания устройства для приготовления и дозирования кофе или другого напитка по настоящему изобретению.
Программа хранится в памяти и выполняется блоком управления устройства для приготовления и дозирования напитков по настоящему изобретению; вышеуказанная программа содержит: коды, выполняемые компьютером для определения положений h1, h2 и α камеры настаивания, нижнего поршня и лотка; коды, выполняемые компьютером для проверки соответствия вышеуказанных положений h1, h2 и α положениям, хранящимся на карте в памяти и адаптированным для приготовления напитков, подлежащих дозированию; коды, выполняемые компьютером для изменения положений h1, h2 и α камеры настаивания, нижнего поршня и лотка, чтобы они достигали соответствующих значений, хранящихся в памяти.
По варианту настоящего изобретения код определяет прямо и/или косвенно координаты h1, h2 и α с помощью, по меньшей мере, одного датчика положения; код сравнивает значения таких координат со значениями координат, хранящихся на карте в памяти; в случае, когда хранящиеся координаты и определяемые координаты отличаются, дополнительный код изменяет положения h1, h2 и α посредством приведения в действие двигательного средства.
По дополнительному варианту настоящего изобретения координаты h1, h2 и α, оптимизирующие распределение кофейного порошка для приготовления каждого напитка, дозируемого устройством для приготовления и дозирования напитков по настоящему изобретению, как описано выше, хранятся на карте, при этом такие координаты, хранящиеся на карте, были получены ранее в результате экспериментальных испытаний.
Краткое описание чертежей
Другие варианты и предметы настоящего изобретения станут более понятными из приведенного ниже описания, представленного в пояснительных неограничивающих целях, со ссылкой на приложенные схематичные чертежи, на которых:
На фиг. 1 - устройство для приготовления и дозирования кофе, вид спереди в частичном разрезе;
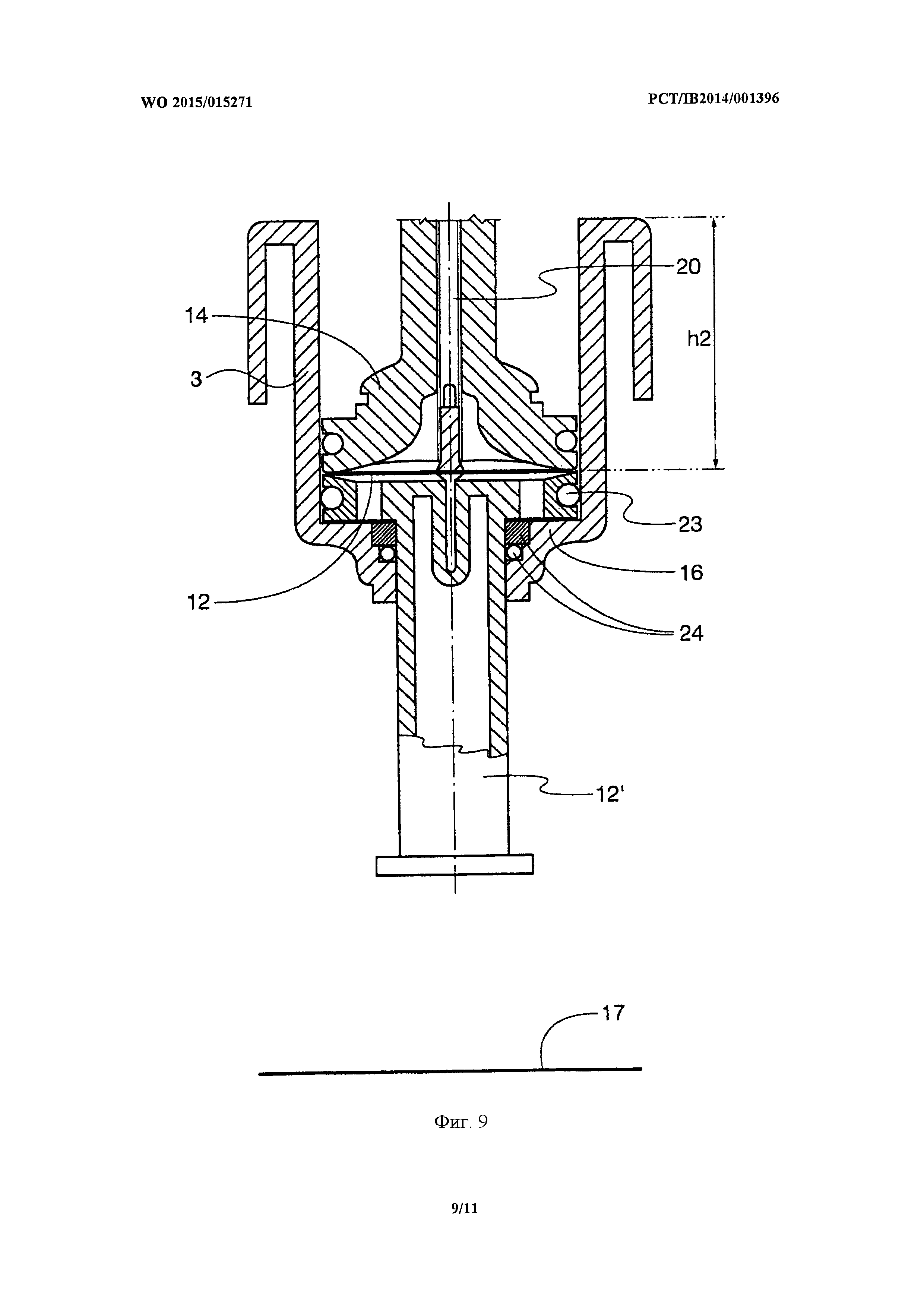
На фиг. 2, 3 и 9 показано расположение камеры и поршней на двух этапах способа по изобретению, виды в разрезах;
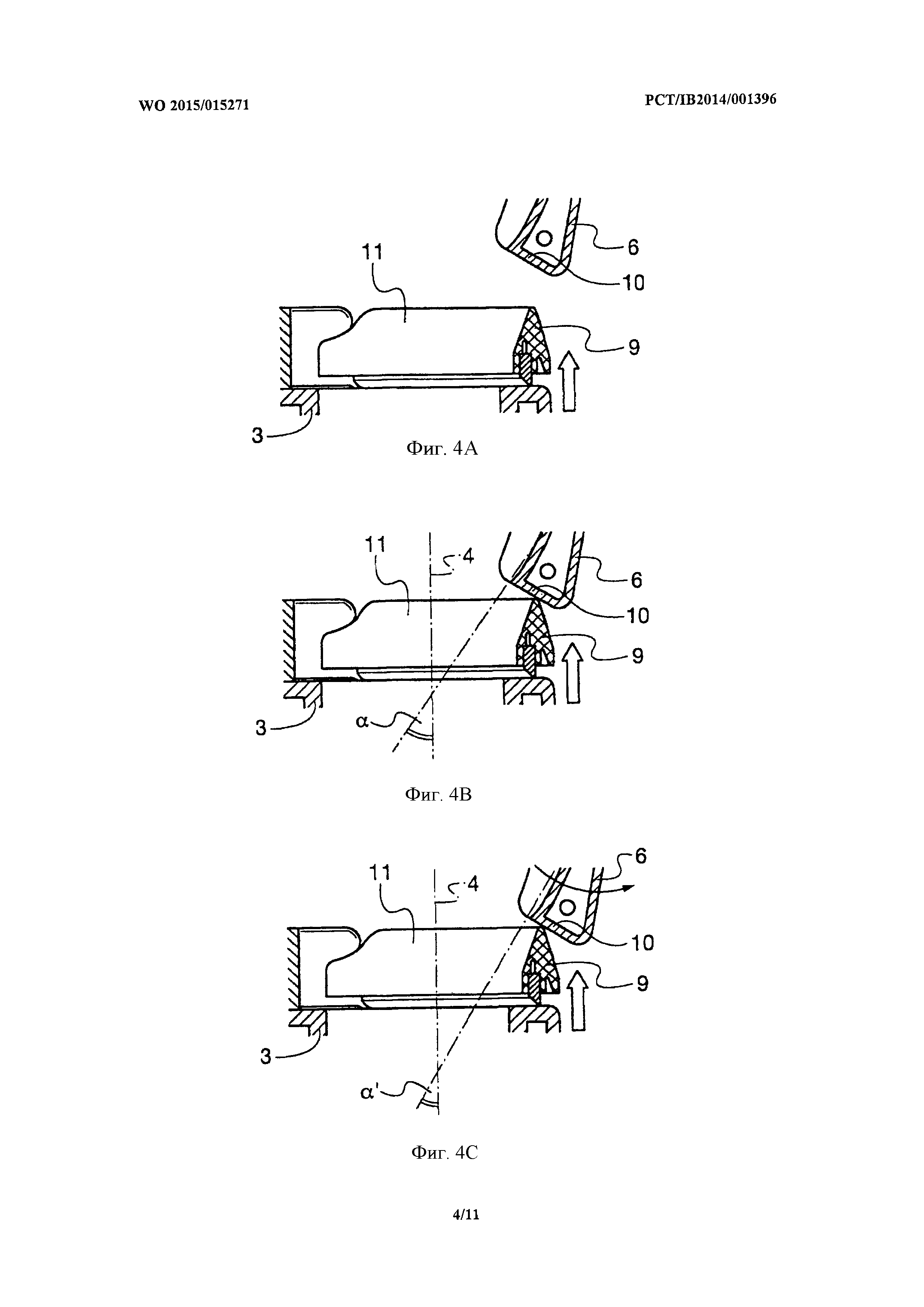
На фиг. 4А-4С - некоторые этапы регулирования наклонения лотка с помощью камеры настаивания в способе по изобретению;
На фиг. 5 и 6 - устройство во время этапа прессования молотого кофе, виды в частичных разрезах;
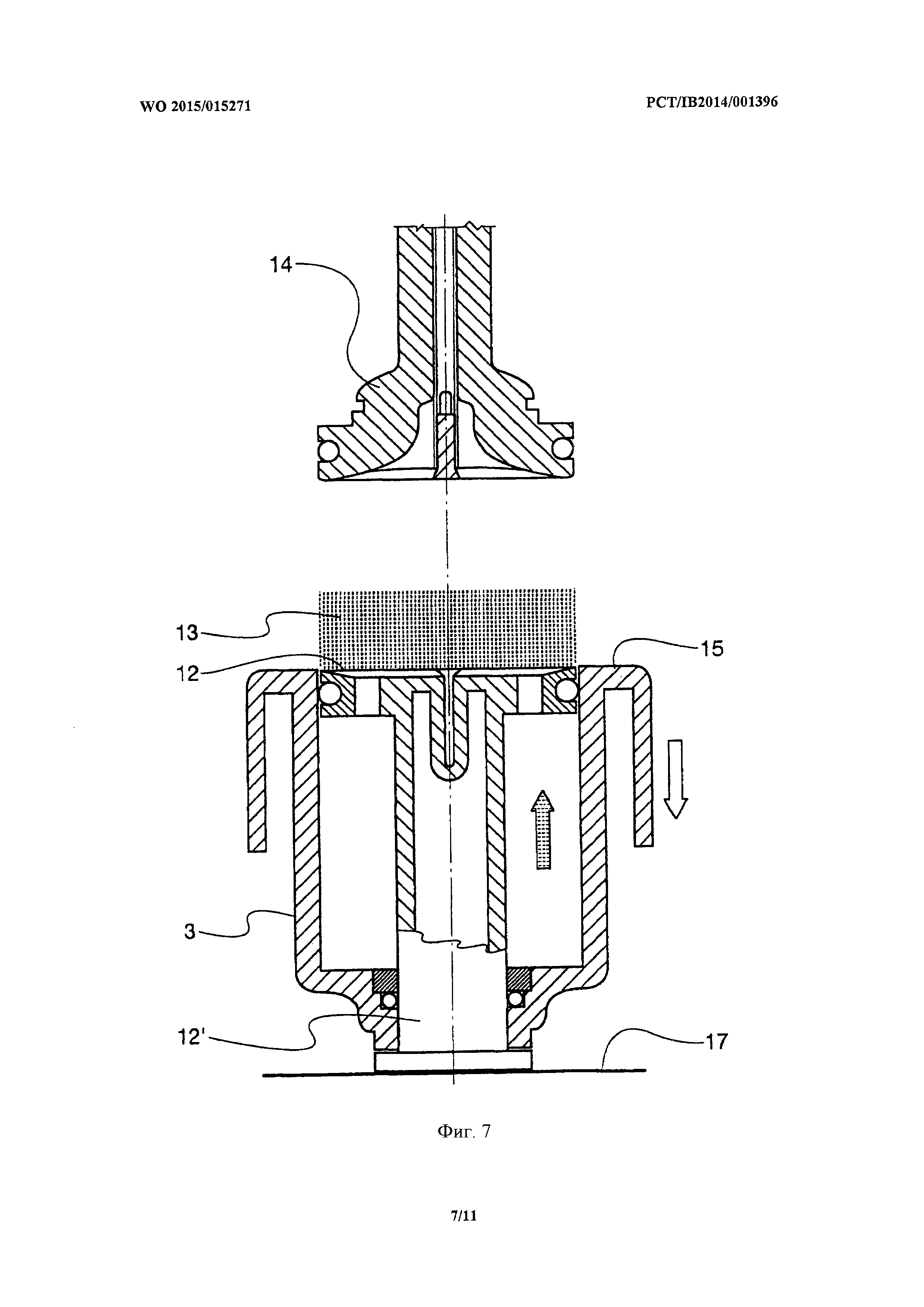
На фиг. 7 и 8 - устройство во время этапа выталкивания таблетки молотого кофе после настаивания, виды в частичных разрезах;
На фиг. 10 и 11 - положения камеры и поршней во время цикла приготовления напитка, начиная с двух различных исходных положений камеры.
Осуществление изобретения
Как показано на фиг. 1, устройство для приготовления и дозирования кофе имеет опорную раму 2, к которой присоединены средства, необходимые для приготовления напитка. В частности, показаны камера 3 настаивания, имеющая цилиндрическую форму, с вертикальной или, по существу, вертикальной осью 4 (т.е. наклоняемой относительно вертикали на угол менее 10 градусов, предпочтительно менее 5 градусов и более предпочтительно менее 3 градусов от вертикали), при этом камера 3 установлена на опорной раме 2. В частности, камера 3 настаивания может перемещаться поступательно относительно рамы 2 в направлении оси камеры 3 настаивания, как показано стрелкой F на фиг. 1. Внутри камеры 3 расположен поршень 12, известным образом образующий подвижную нижнюю стенку.
Устройство 1 также имеет загрузочный лоток, установленный на опорной раме 2 для подачи молотого кофе в камеру настаивания. Загрузочный лоток 6 расположен над камерой 3 настаивания и может вращаться относительно оси 8, прикрепленной к той же самой раме 2, как показано стрелкой 7 на фиг. 1.
Устройство 1 также содержит верхний поршень 14 для прессования кофейной таблетки 13; в показанном варианте выполнения вышеуказанный поршень 14 является неподвижным, но могут быть предусмотрены дополнительные варианты выполнения, в которых поршень 14 может перемещаться в осевом направлении.
Устройство 1 также содержит средства для расположений подвижной камеры 3 настаивания и/или загрузочного лотка 6 относительно друг друга в таком положении, чтобы молотый кофе, выходящий из лотка, оседал на нижней стенке 12 камеры 3 настаивания по заданной схеме распределения.
По изобретению в предпочтительном варианте выполнения, показанном на фигурах в качестве примера, камера 3 настаивания установлена известным образом на червяке 5, который приводится в движение двигательным средством M1, которое схематично показано на фиг. 1 и вызывает вращение червяка 5 и последующее вертикальное перемещение камеры вдоль оси 4. В показанном варианте выполнения направление последовательного перемещения камеры 3 настаивания параллельно оси 4 самой камеры 3 настаивания. Двигательное средство M1 может точно выполнять небольшие перемещения камеры 3 настаивания, где под термином «небольшие» подразумеваются перемещения приблизительно на десятую долю миллиметра. Например, двигательное средство M1 может содержать шаговый двигатель, приводящий в действие червяк 5, соединенный с гайкой, составляющей одно целое с камерой 3.
Как указано выше, загрузочный лоток 6 может вращаться относительно оси 8, которая предпочтительно установлена перпендикулярно оси последовательного перемещения камеры настаивания, но предпочтительно не пересекается с ней. Лоток 6 установлен симметрично оси 8 вращения, поэтому он обычно смещается под действием собственного веса и поворачивается в направлении верхнего поршня 14; как показано на фиг. 1, лоток 6 расположен на стороне второго цилиндра и продолжается через верхний участок 19 рамы вплоть до плеча 6', которое, в свою очередь, продолжается вплоть до точки крепления, состоящей из оси 8 с противоположной стороны относительно оси 4.
Лоток 6 содержит плоскость Ρ падения или скольжения, которая пересекает ось 4 под углом α (верхний угол); считая угол α постоянным на основе положения камеры 3 и нижнего поршня 12, плоскость Ρ пересекает стенку внутри камеры или поршень 12 в различных возможных положениях. Плоскость Ρ образована последним участком лотка или, если такой участок является криволинейным, эта плоскость является плоскостью, которая продолжается между начальной и конечной частями вышеуказанного криволинейного участка.
В практических целях предполагается, что плоскость Ρ соответствует идеальному направлению скольжения кофейного порошка, при этом вышеуказанное направление представляет собой прямую линию, касательную к траектории движения по параболе (под действием силы тяжести) кофейного порошка в конечной точке лотка.
Положение камеры настаивания определяется расстоянием h1 между нижней стороной верхнего основания 19 рамы 2 и верхним краем 15 камеры 3 настаивания. Положение нижнего поршня 13 определяется расстоянием h2 (фиг. 3) между вышеуказанным поршнем 12 и верхним краем 15 камеры 3 настаивания. Три значения h1, h2 и α являются координатами, идентифицирующими положение камеры, поршня и лотка и возможную траекторию молотого кофе.
Все три вышеуказанные описанные значения, т.е. α, h1 и h2, могут изменяться для регулирования идеальной точки пересечения плоскости Ρ с камерой настаивания с целью обеспечения равномерного распределения кофе внутри самой камеры. Такое идеальное распределение является максимально равномерным для получения толщины таблетки после прессования, которая также является максимально равномерной. Идеальная форма равномерного распределения является формой, в которой самая верхняя точка (вершина) конуса, полученного из кофе, который подают в камеру, лежит на оси 4 или непосредственно рядом с ней. Как вариант, могут быть получены две или более вершин конуса, равных друг другу и находящиеся в камере на расстоянии друг о друга; они могут быть получены посредством изменения координат h1, h2 и α во время распределения молотого кофе.
По настоящему изобретению регулирование координат h1, h2 и α осуществляется посредством регулирования с разомкнутой цепью управления; значения h1, h2 и α, обеспечивающие равномерное распределение кофе в камере, получают в результате экспериментальных испытаний и хранятся в карте отображения; хранимые значения h1, h2 и α получают экспериментальным путем для группы заданных количеств кофе, в общем, соответствующих количеству, необходимому, по меньшей мере, для приготовления одного конкретного напитка. Другими словами, определенное значение для заданных количеств кофе выбирается, например, равным 4,0 г, 8,0 г, 11,0 г и 14,0 г, что соответствует определенным напиткам (крепкий кофе, эспрессо, слабый кофе, кофе американо), при этом координаты h1, h2 и α получают экспериментально, что обеспечивает оптимальное распределение молотого кофе, и такие координаты хранятся в карте отображения блока управления совместно с данными о соответствующих напитках и количествах кофе, подлежащих подаче.
Каждая карта отображения, хранящаяся в блоке управления, в любом случае относится к конкретной характеристике молотого кофе и/или конкретной плотности кофе; в общем, в блоке управления хранится, по меньшей мере, одна карта отображения, где хранятся координаты h1, h2 и α, которые должны быть получены с помощью устройства настаивания во время полного цикла приготовления одного или нескольких напитков.
При дозировании напитка, например, слабого кофе, блок 21 управления отслеживает координаты h1, α и h2 камеры, лотка и поршня посредством их определения известным образом (например, с помощью датчиков положения, кодеров на червяке 5 или подобных устройств); затем блок управления приводит в действие двигательное средство M1 с помощью замкнутой цепи управления для перемещения устройства настаивания из, в общем, начального положения в заданное положение посредством использования координат h1, h2 и α, которые хранятся для приготовления напитка, подлежащего дозированию; затем молотый кофе направляется в камеру настаивания; блок управления может содержать в памяти дополнительные положения, и в этом случае во время этапа подачи устройство настаивания должно обеспечить получение дополнительных координат h1, h2 и α; в дальнейшем молотый кофе прессуется для получения таблетки, в общем, перед настаиванием с использованием горячей воды.
Те же самые операции выполняются повторно для приготовления следующего напитка.
В предпочтительном варианте выполнения, показанном на фигурах, значения α, h1 и h2 могут изменяться за счет последовательного перемещения камеры непосредственно в отношении h1 и косвенно в отношении h2 и α.
Что касается изменения угла α, изобретение предусматривает, что нижний край лотка имеет такую форму, что он может поворачиваться посредством нажима со стороны последовательно перемещающейся камеры 3; с этой целью лоток и камера имеют предпочтительно кулачковые средства. В частности, камера 3 имеет вверху известным образом выталкивающее средство 11, например, вращающееся вокруг оси, параллельной оси 4, для удаления таблетки экстрагированного кофе, когда распределение заканчивается. Криволинейные поверхности 9, 10, соответственно предусмотрены на выталкивающем средстве 11, связанном с камерой 3 выталкивания, и на загрузочном лотке 6, так что их контакт приводит к перемещению загрузочного лотка 6 относительно камеры 3 настаивания и последующему изменению угла α.
Как можно видеть на фиг. 4А-4С со ссылкой на показанный вариант выполнения, подъем камеры 3 настаивания и уменьшение расстояния h1 приводят к контакту криволинейной поверхности 9 с криволинейной поверхностью 10 загрузочного лотка 6 и последующему вращению против часовой стрелки загрузочного лотка 6 вокруг оси 8 и уменьшению угла α. И, наоборот, опускание камеры 3 настаивания и увеличение расстояния h1 приводят к вращению по часовой стрелке загрузочного лотка 6 и увеличению угла α. Дальнейшее опускание камеры 3 настаивания вызывает разъединение криволинейных поверхностей 9 и 10 для нарушения связи между перемещением загрузочного лотка 6 и перемещением самой камеры 3 настаивания и обеспечения свободного позиционирования камеры настаивания относительно загрузочного лотка. Очевидно, что возможны различные положения криволинейной поверхности 9 при условии ее взаимодействия с криволинейной поверхностью 10 загрузочного лотка 6.
В представленном описании кулачковые средства 9, 10 описаны применительно к управлению свободно вращающимся загрузочным лотком 6 посредством перемещения камеры 3, но могут быть предусмотрены различные управляющие средства, например, управляющие средства с приводом, известные по существующему уровню техники, применительно к контролируемому позиционированию загрузочного лотка относительно камеры настаивания.
Согласно особому варианту изобретения камера 3 настаивания имеет нижний поршень, образующий, по меньшей мере, одну подвижную нижнюю стенку 12, далее именуемую просто нижним поршнем 12, который позволяет изменять объем камеры 3. Нижний поршень 12 выполнен как одно целое со стержнем или штоком 12', выступающим от нижней части камеры 3. Как указано выше, положение нижнего поршня 12 может определяться расстоянием h2 между вышеуказанным нижним поршнем 12 и верхним краем 15 камеры 3 настаивания.
В показанном предпочтительном варианте выполнения положение h2 поршня регулируется последовательным перемещением камеры настаивания; в других вариантах выполнения для регулирования расстояния h2 может быть предусмотрено средство с электроприводом.
Например, начиная с исходного положения, показанного на фиг. 9, в котором камера полностью поднята, и нижний поршень 12 полностью опущен в камеру 12, расстояние h2 равно максимальному значению; для уменьшения расстояния h2, т.е. перемещения нижнего поршня 12 к верхнему краю 15 камеры 3 настаивания камера настаивания последовательно перемещается вниз до тех пор, пока стержень 12', посредством опирания на нижнее основание 15 рамы 2 не будет удерживать нижний поршень 12 в неподвижном положении, и опускание камеры 3 настаивания будет уменьшать расстояние h2 до необходимого значения, например, половины расстояния на фиг. 9.
Когда камера настаивания последовательно перемещается вверх, нижний поршень остается в предварительно заданном положении с помощью трущихся средств 23 и 24, например, прокладок, которые препятствуют свободному скольжению вышеуказанного нижнего поршня внутри камеры настаивания; вышеуказанные трущиеся средства могут быть, например, уплотнительными кольцами круглого сечения.
На фиг. 2 показано положение, в котором расстояние h2 равно 0, поскольку как камера 3, так и поршень 12, смещены в их максимальное нижнее положение и упираются в нижнее основание рамы. Начиная с исходного положения, показанного на фиг. 2, в котором нижний поршень 12 расположен заподлицо с верхним краем 15 камеры 3 и расстояние h2 равно нулю (минимальному значению), для увеличения расстояния h2 камера 3 настаивания поступательно перемещается вверх, при этом нижний поршень 12 упирается в верхний поршень 14, останавливается и удерживается в неподвижном положении, в то время как поднимающаяся камера 3 настаивания будет увеличивать расстояние h2.
В любом случае предусматриваются дополнительные варианты выполнения, в которых положение нижнего поршня 12, т.е. расстояние h2, может быть отрегулировано посредством управления вышеуказанным нижним поршнем с помощью соответствующего средства с электроприводом, известного по существующему уровню техники.
Блок 21 управления определяет положения камеры 3, нижнего поршня 12 и лотка 6 с помощью, по меньшей мере, одного из значений координат h1, h2 и α; в целях настоящего изобретения положение h2 нижнего поршня 12 определяется его перемещением от координаты h1 относительно положения камеры настаивания во время рабочего цикла. Другими словами, начиная с исходного ссылочного положения h1, в котором, например, камера настаивания полностью опущена (сравнительное положение А на фиг. 10), такая исходная координата h1 соответствует координате h2, равной нулю, когда нижний поршень 12 находится заподлицо с верхним краем камеры 3; далее, начиная с этого этапа цикла, можно последовательно перемещать камеру настаивания до конечной высоты h1, и нижний поршень 12 посредством упирания в верхний поршень 14 будет достигать требуемой высоты h2, тем самым, определяя расстояние h2 от определяемой высоты h1.
Аналогично, начиная со ссылочного положения h1, в котором, например, камера 3 настаивания полностью поднята (см. фиг. 9), на таком этапе цикла исходная координата h1 соответствует известной координате h2, равной ее максимальному значению, когда нижний поршень 12 полностью опущен внутрь камеры 3; далее, начиная с этого этапа цикла, можно постепенно последовательно перемещать камеру настаивания до окончательной высоты h1, так чтобы стержень 12' нижнего поршня 12 упирался в нижнее основание 17 рамы 2, и нижний поршень 12 достигал необходимой высоты h2, тем самым, определяя расстояние h2 от обнаруженной высоты h1.
Следует отметить, что значение h2 может определяться посредством обнаружения положения точки стержня 12', например конца, и положения камеры 3, т.е. h1. Зная расстояние между концом стержня 12' и концом поршня 12, можно определить значение h2.
Как вариант, положение h2 нижнего поршня можно регулировать относительно камеры настаивания с помощью соответствующего средства с электроприводом, известного по существующему уровню техники, и в этом последнем случае расстояние h2 может определяться датчиками положения известными по существующему уровню техники, которые соединены с таким средством с электроприводом.
Как описано выше, в предпочтительном варианте выполнения, показанном на фигурах, угол α также задается как функция h1; это позволяет изменять точку пересечения плоскости Ρ и внутренней стенки камеры или поршня 12 больше, чем в варианте выполнения, в котором угол α регулируется с помощью постоянного значения h1. В общем, точка пересечения плоскости Ρ и внутренней стенки камеры или поршня 12 может быть смещена, например, к лотку, за счет постоянного угла α и уменьшения h1 (посредством последовательного перемещения камеры вверх) или же постоянного значения h1 и уменьшения α (посредством поворачивания лотка).
Со ссылкой на фиг. 4А-4С в показанном варианте выполнения уменьшение h1 автоматически ведет к уменьшению α, и аналогично увеличение h1 соответствует увеличению угла α; имеется возможность быстрого обеспечения смещения точки пересечения плоскости Ρ и внутренней стенки камеры или поршня 12 с помощью непродолжительного и точного вращения шагового двигателя, соответствующего изменению h1 и затем α.
Аналогично расстоянию h2 угол α также может быть определен соответствующими датчиками положения, известными по существующему уровню техники, или получен из расстояния h1.
Как указано выше, идеальная форма равномерного распределения является формой, в которой самая верхняя точка (вершина) конуса, полученного из кофе, который подают в камеру, лежит на оси 4 или непосредственно рядом с ней. На основании этого визуального наблюдения или других наблюдений, которые могут быть визуальными или невизуальными, например, слоя кофе, по, существу, постоянной толщины, и/или периодов времени дозирования напитка и/или органолептических характеристик дозируемого кофе (который является готовым напитком) можно составлять «карты», в которых будут храниться предпочтительные координаты, необходимые для приготовления каждой порции кофе, что обеспечивает требуемое распределение молотого кофе в камере настаивания.
Это позволяет использовать камеру настаивания с относительно большими размерами также и для приготовления очень небольших количеств молотого кофе без потери качества дозируемого напитка.
Во время создания карты сохраняются координаты h1, h2 и α, с использованием которых можно повторно получать заданное распределение молотого кофе, оседающего в камере настаивания; конкретный вариант выполнения, показанный на фигурах, позволяет определять и регулировать h2, α с помощью h1, в результате чего можно получать варианты выполнения, в которых полученные карты являются более простыми, и в которых хранится только координата h1 положения или группы положений (координаты h1), которая должна быть достигнута для каждого количества кофе и для каждого напитка, выбираемого пользователем; в этом варианте выполнения значения, принимаемые на основе h1, и, по меньшей мере, значение h2 в начале цикла в любом случае известны.
Практически, во время создания карты можно определять экспериментально полученные значения h1, h2 и α и сохранять их в карте; или можно определять только значения h1 и получать значения h2 и α на основе h1 и затем сохранять такие координаты на карте; или можно определять и сохранять только координаты h1, т.е. все положения, в которых должна находиться камера во время всего цикла приготовления конкретного напитка, выбранного пользователем, начиная с известного значения h2 в начале цикла.
Ниже со ссылкой на фиг. 2-8 приводится описание этапов приготовления напитка.
Сначала пользователь машины, содержащей устройство 1 по настоящему изобретению, выбирает дозирование кофе с помощью известных способов. Блок 21 управления известным образом отслеживает (например, с помощью датчиков положения, кодеров на червяке 5 или подобных устройств) координаты h1, h2 и α камеры поршня 12 и лотка 6.
Далее перед подачей самотеком выбранного количества молотого кофе в камеру 3 настаивания блок 21 управления выбирает из хранящейся карты координаты h1, h2 и α, которые должны быть достигнуты устройством настаивания во время всего рабочего цикла.
Сначала блок управления воздействует на двигатель M1 устройства 1 для адаптации объема камеры настаивания (высота h2) к типу кофе, выбранному пользователем.
Как указано выше, регулирование h2 может выполняться в ряде режимов, например, с помощью соответствующих двигателей. В иллюстративном внедрении, показанном на фигурах, регулирование h2 обычно выполняется, начиная с исходной конфигурации камеры 3, т.е. конфигурации, показанной на фиг. 7. По существу, это положение, которое камера должна занимать, по меньшей мере, во время этапа выталкивания экстрагированной таблетки кофе; нижний поршень 12 камеры 3 настаивания поднят, по существу, заподлицо с верхним краем 15 камеры 3 настаивания, и стержень 12' поршня упирается в нижнее основание 17 рамы 2.
В этом ссылочном положении расстояние h1 соответствует координате h2, равной нулю, поскольку нижний поршень 12 находится заподлицо с верхним краем 15 камеры 3; как показано на фиг. 2, для регулирования объема камеры настаивания камера последовательно перемещается до тех пор, пока верхний поршень 14 не будет контактировать с нижним поршнем 12 и проталкиваться внутрь камеры; камера поступательно перемещается вверх и достигает положения h1, значение которого может храниться в памяти или в любом случае подсчитываться из значения требуемой координаты h2.
Такое конечное положение достигается с помощью замкнутой цепи управления, выполняемого логической схемой управления, которая, таким образом, отслеживает положение h1 камеры и обеспечивает действие двигательного средства M1 до тех пор, пока расстояние h1 не достигнет значения, хранящегося на карте. Положение h1 камеры определяется датчиками положения, кодерами на червяке 5 или схожими устройствами.
Как вариант, регулирование h2 выполняется, начиная с исходной конфигурации камеры 3, т.е. конфигурации, показанной на фиг. 9. В этой конфигурации камера полностью поднята, и нижний поршень 12 камеры 3 настаивания полностью опущен; в этой исходной конфигурации координата h1 и координата h2 известны (равны их минимальному и максимальному значениям, соответственно). Как показано на фиг. 9, для регулирования высоты h2 камера опускается, так что стержень 12' нижнего поршня 12 упирается в нижнее основание 17 рамы 2, и нижний поршень 12 достигает требуемой высоты h2; с этой целью камера опускается для достижения положения h1, которое может храниться в памяти в любом случае и рассчитываться из требуемого значения h2. Такое конечное положение h1 достигается с помощью замкнутой цепи управления аналогично вышеприведенному описанию.
Сразу же после задания объема камера 3 настаивания поступательно перемещается для достижения дополнительного положения h1, хранящегося на карте; в такой конфигурации камера расположена под загрузочным лотком, и благодаря взаимному контакту криволинейных поверхностей 9 и 10 такое положение h1 соответствует требуемому углу α загрузочного лотка 6; фактически, как указано выше, каждое значение α, полученное во время создания карты, соответствует хранящемуся значению h1.
После достижения этого значения h1 и, соответственно, найденного угла α, как показано на последовательности фиг. 4А-4С, можно подавать молотый кофе, как схематично показано на фиг. 5. Благодаря оптимальному позиционированию камеры 3 настаивания и лотка 6, обеспечивается максимально равномерное распределение молотого кофе внутри камеры 3. В карте памяти в любом случае предусматривается возможность хранения значений дополнительных углов α (и дополнительных положений h1), которых камера должна достигать в заданные диапазоны времени во время подачи молотого кофе. Другими словами, во время подачи молотого кофе в камеру, обычно имеющей место во время перемалывания кофейных зерен, логическая схема управления может приводить в действие двигательное средство M1 и изменять угол α на основе дополнительных значений h1, хранящихся в карте памяти; для достижения таких хранящихся координат блок управления может останавливать перемалывание во время поступательного перемещения камеры или даже поступательно перемещать камеру во время перемалывания и последующего оседания кофейного порошка.
При завершении этапа подачи камера 3 настаивания снова поднимается к поршню 14, как показано на фиг. 6, для прессования молотого кофе и образования так называемой «таблетки» 13. Нижний поршень 12 толкается поршнем 14 до тех пор, пока он не остановится рядом с нижним краем 16 камеры 3 настаивания, т.е. в положении, в котором поршень 14 прикладывает давление, необходимое для сжатия молотого кофе и образования таблетки 13. В показанном положении на фиг. 6 выполняется настаивание кофе, т.е. подача воды в камеру 3 настаивания через радиальный впускной канал (не показан), сообщающийся с нижней частью камеры 3 настаивания. Затем жидкость для настаивания проходит через камеру 3 настаивания с целью экстракции веществ из таблетки 13 кофе и спрессовывает кофе. Выпускной канал 20 позволяет пользователю дозировать напиток.
На фиг. 7 и 8 показаны операции удаления экстрагированной таблетки 13. Камера 3 настаивания перемещается от поршня 14 в основное положение А на фиг. 10, при этом значение h2 равно нулю, как показано на фиг. 2. В частности, камера 3 настаивания полностью опускается, так чтобы стержень 12' нижнего поршня 12 упирался в нижнее основание 17 рамы 2, тем самым, перемещая нижний поршень 12 у верхнего края 15 камеры 3 настаивания, как показано на фиг. 7 (значение h2 равно нулю).
Далее, как показано на фиг. 8, камера 3 поступательно перемещается вверх для достижения положения выгрузки, как показано на фиг. 8 (положение i на фиг. 10, 11). После достижения этого положения выталкивающее средство удаляет таблетку 13. В описанном здесь варианте выполнения выталкивающее средство состоит из лопатки 11, которая поворачивается вокруг оси 18 с целью удаления, за счет вращения, таблетки 13 с нижнего поршня 12 в поднятое положение. После удаления таблетки 13 вновь создается исходное состояние, и можно начинать новый цикл приготовления и дозирования кофе.
На фиг. 10 и 11 показан цикл дозирования напитка, где представлено положение, которое могут занимать камера и поршень относительно друг друга. Цикл, показанный на фиг. 10, начинается из исходного положения, в котором камера и поршень находятся в нижних положениях, и цикл, показанный на фиг. 11, начинается из исходного положения, в котором камера и поршень находятся в верхних положениях (аналогично фиг. 9).
В иллюстративных неограничивающих целях ниже приведены значения координат h1, h2 и α, которые получены во время экспериментальных испытаний и оптимизируют распределение кофе в камере настаивания, имеющей диаметр 45 мм.
Порция 4 грамма: h1=106 мм; h2=36 мм; α=27°;
Порция 8 грамм: h1=109,5 мм; h2=42 мм; α=27°;
Порция 14 грамм: h1=104,5 мм; h2=44 мм; α=26,2° (в течение первых 6 секунд);
h1=109,5 мм; h2=44 мм; α=27° (в течение следующих 4 секунд);
Реферат
Предложен способ приготовления кофе в устройстве дозирования; устройство (1) содержит загрузочный лоток (6), установленный на опорной раме (2) и способный вращаться относительно вышеуказанной рамы для подачи молотого кофе в камеру (3) настаивания, при этом загрузочный лоток (6) и камера (3) настаивания расположены таким образом, чтобы обеспечивать требуемое распределение молотого кофе в камере (3). 3 н. и 13 з.п. ф-лы, 11 ил.
Комментарии