Агрегат для внесения жидких и/или твердых активных веществ и способ управления таким агрегатом - RU2630703C2
Код документа: RU2630703C2
Чертежи



Описание
Настоящее изобретение относится к агрегату для внесения жидких и/или твердых активных веществ согласно ограничительной части независимого п. 1 формулы изобретения, а также к способу управления движением и/или регулирования движения агрегата для внесения жидких и/или твердых активных веществ согласно ограничительной части п. 11 формулы изобретения.
Полевые опрыскиватели и навешенные на такие рабочие машины, как тракторы, опрыскивающие трубопроводы частично имеют очень большую рабочую ширину, больше чем 20 м. Для транспортировочных поездок такие широкие опрыскивающие трубопроводы сгибаются и складываются. На поле с обеих сторон рабочей машины находятся симметричные консоли длиной несколько метров, которые в зависимости от состояния поверхности и рельефа поля имеют переменное расстояние до почвы. Так как каждое из расположенных на консолях и направленных вниз сопел для внесения средства для опрыскивания, такого как, например, средства для защиты растений, имеет определенный конус опрыскивания, то из-за переменного расстояния от сопел до почвы покрытие поля средством для опрыскивания получается неравномерным. С увеличением расстояния от опрыскивающих сопел до почвы значительно повышается также опасность сноса средства для опрыскивания, так как на тонко распыленные капли отрицательно действуют даже малые движения воздуха.
По этой причине при увеличивающихся размерах консолей и соответствующей им рабочей ширине возникает необходимость проводить опрыскивающие трубопроводы на по возможности сохраняющемся расстоянии до почвы, так как положения даже с малым наклоном опрыскивающего трубопровода приводят к большим разницам расстояний от сопел до почвы.
К тому же известно, что опрыскивающий трубопровод следует навешивать на несущее транспортное средство с возможностью поворота вокруг центральной точки вокруг по меньшей мере одной поворотной оси. При этом поворотная ось проходит, преимущественным образом, параллельно продольной оси несущего транспортного средства. Для того чтобы обеспечить равномерное внесение средства для опрыскивания, расстояние между верхним краем насаждений и распылительными соплами должно неизменно регулироваться на определенное расстояние. На горизонтальных сельскохозяйственных площадях это в принципе может быть достигнуто посредством автоматического нивелирования, при котором опрыскивающий трубопровод выравнивается по горизонтали самостоятельно за счет того, что центр тяжести опрыскивающего трубопровода предусматривается ниже центральной точки и опрыскивающий трубопровод навешен, например, с возможностью поворота, свободно качаясь. Тем не менее, на сельскохозяйственных площадях, которые проходят вдоль склона, желаемый эффект отсутствует.
Поэтому известно, что для того, чтобы при проходящих любым образом сельскохозяйственных площадях расстояние между верхним краем насаждений и расположенными на навешенном с возможностью поворота вокруг центральной точки опрыскивающем трубопроводе распылительными соплами неизменно регулировать на определенное расстояние, следует поворачивать, например, приподнятый на желаемое расстояние от почвы опрыскивающий трубопровод вокруг проходящей через центральную точку поворотной оси так, чтобы это расстояние оптимизировалось по всей рабочей ширине. Для этого на опрыскивающий трубопровод должен оказывать влияние момент изменения ориентации, действующий вокруг проходящей через центральную точку поворотной оси. Это совершается с помощью по меньшей мере одного исполнительного элемента, который по меньшей мере по необходимости передает вызывающую момент изменения ориентации вокруг поворотной оси силу или пару сил с несущего транспортного средства на опрыскивающий трубопровод, чтобы изменить его ориентацию.
Данным моментом изменения ориентации опрыскивающий трубопровод ускоряется в необходимом заданном направлении поворота. Без контрмер опрыскивающий трубопровод поворачивался бы вокруг поворотной оси далее даже после окончания действия момента изменения ориентации, так как его импульс вращения сохраняется, что обусловлено моментом инерции массы.
Поэтому для того, чтобы снова затормозить опрыскивающий трубопровод, в противодействие прежнему моменту изменения ориентации должен быть введен момент торможения вращения. Данный момент торможения вращения действует против инициированного моментом изменения ориентации поворотного движения и таким образом демпфирует систему, состоящую из навешенного с возможностью поворота вокруг центральной точки опрыскивающего трубопровода.
До сих пор для приложения момента торможения вращения обычно применяются механические демпферы, которые установлены между несущим транспортным средством и опрыскивающим трубопроводом. Если принять, что между несущим транспортным средством и трубопроводом возникает относительное движение в форме поворота вокруг поворотной оси, то установленный между ними механический демпфер противодействует относительному повороту или же относительному движению трубопровода и, как необходимо, тормозит его, как это необходимо. Если же несущее транспортное средство поворачивается, например вследствие неровностей, вокруг поворотной оси, а опрыскивающий трубопровод стоит неподвижно, то между несущим транспортным средством и опрыскивающим трубопроводом тоже возникает относительный поворот. Механический демпфер, который установлен между несущим транспортным средством и опрыскивающим трубопроводом, действовал бы навстречу этому относительному повороту и таким образом передавал бы на опрыскивающий трубопровод момент вращения, действующий вокруг поворотной оси, вследствие чего существовала бы связь между несущим транспортным средством и опрыскивающим трубопроводом.
Данная связь существует равным образом, если в качестве базы для регулирования момента вращения применяется измерительная система, которая измеряет относительный угол или относительный поворот между несущим транспортным средством и опрыскивающим трубопроводом.
Помимо этого, известны измерительные системы, в которых для того, чтобы определить положение опрыскивающего трубопровода, используются расположенные на опрыскивающем трубопроводе датчики наклона. Скорость поворота опрыскивающего трубопровода независимо от несущего транспортного средства может быть получена посредством производной от наклона по времени.
Однако при поперечных ускорениях, которые возникают, например, при движении по кривой, датчики наклона дают ошибочный наклон. Следовательно, рассчитывается тоже ошибочная скорость поворота.
Из US 2011/0282554 А1 известен агрегат для внесения жидких активных веществ. В агрегате содержатся:
- несущее транспортное средство,
- расположенный на несущем транспортном средстве опрыскивающий трубопровод, включающий в себя настраиваемую изменяемо в ее удалении от почвы среднюю часть, а также две расположенные на ней с возможностью движения независимо друг от друга вокруг соответственно собственных, проходящих параллельно продольной оси несущего транспортного средства поворотных осей, отстоящие от несущего транспортного средства с боков консоли,
- расположенные на обеих консолях датчики расстояния для регистрации позиций или расстояний от концов консолей до почвы,
- по меньшей мере один расположенный на средней части между консолями датчик расстояния для регистрации расстояния от средней части до почвы,
- перерабатывающее выходные сигналы датчиков в управляющие сигналы регулирующее устройство,
- по одному действующему на одну из обеих консолей исполнительному элементу в виде гидравлического цилиндра для индивидуального поднятия и опускания конца каждой консоли в зависимости от управляющих сигналов регулирующего устройства, а также
- расположенный на несущем транспортном средстве независимо от опрыскивающего трубопровода, регистрирующий угол поперечных колебаний или частоту поперечных колебаний несущего транспортного средства вокруг его продольной оси датчик угла поворота или частоты вращения.
Датчики расстояния могут представлять собой датчики типа LIDAR (Light Detection And Ranging - детектирование света и определение расстояния), RADAR (Radio Detection And Ranging - радиообнаружение и определение расстояния), или ультразвуковые датчики, или базирующиеся на методе интерференционных измерений или на радиочастоте датчики, такие как, например, датчики GPS. Датчик угла поворота или частоты вращения может представлять собой гироскопический инструмент (гироскоп). Для того чтобы удерживать концы консолей на постоянном расстоянии до почвы, на таком же, как средняя часть, сначала с помощью сравнения выходных сигналов датчиков расстояния рассчитывают ошибку по высоте концов обеих консолей. Если данная ошибка по высоте для конца одной или обеих консолей не равна нулю, то формируется начальный управляющий сигнал, чтобы привести в действие относящийся к соответствующей консоли исполнительный элемент и настроить имеющий ошибку по высоте конец консоли снова на заданное расстояние до почвы. Если при этом одна из консолей поднимается, то из этого следует движение поперечного колебания несущего транспортного средства в направлении поднимаемой консоли, вследствие чего без других мер остающаяся на месте консоль имела бы ошибку по высоте, вытекающую из опускания. Для того чтобы составленный из датчиков расстояния, регулирующего устройства и исполнительных элементов регулирующий контур был устойчивым с точки зрения техники регулирования и, например, не раскачивался неконтролируемо и/или не приводил к боковому опрокидыванию несущего транспортного средства, предусмотрено посредством регулирующего устройства с помощью выходного сигнала датчика угла поворота или частоты вращения, регистрирующего угол поперечных колебаний или частоту поперечных колебаний несущего транспортного средства вокруг его продольной оси, формировать компенсационный противодействующий нестабильности регулирующего контура управляющий сигнал, и выдавать на исполнительные элементы управляющий сигнал, определенный с помощью начального управляющего сигнала и компенсационного управляющего сигнала.
Из WO 2012/146255 А1 тоже известен агрегат для внесения жидких активных веществ. В агрегате содержатся:
- несущее транспортное средство,
- опрыскивающий трубопровод, расположенный на несущем транспортном средстве с возможностью движения вокруг проходящей параллельно продольной оси несущего транспортного средства поворотной оси, с отстоящими с обеих сторон от несущего транспортного средства консолями,
- один или несколько расположенных на опрыскивающем трубопроводе датчиков для регистрации расстояния от консолей до почвы, такой как, например, один или несколько датчиков ускорения, гироскопов и/или датчиков расстояния,
- перерабатывающее выходные сигналы от одного или нескольких датчиков в управляющие сигналы регулирующее устройство,
- стабилизирующее устройство, демпфирующее колебания опрыскивающего трубопровода, включающего в себя две проходящие вдоль обеих консолей направляющие, а также расположенные перемещаемо вдоль каждой из направляющих колодки, и
- исполнительное устройство, влияющее на позиции обеих колодок вдоль направляющих в зависимости от управляющих сигналов от регулирующего устройства.
В качестве ответа на нежелательные вертикальные движения, которые в недемпфированном регулирующем контуре могут побуждать распрыскивающий трубопровод к крутильным колебаниям вокруг продольной оси несущего транспортного средства, предусмотрены демпфирование и компенсация посредством перемещения масс с помощью перемещения колодок вдоль обеих консолей. В качестве входных величин регулирующего устройства, вливающихся в сигналы управления исполнительным устройством, служат выходные сигналы от датчиков ускорения, регистрирующих вертикальные колебания опрыскивающего трубопровода и закрепленных на консолях. Регулирование неизменного расстояния от консолей до почвы не раскрыто.
Из DE 10 2007 045 846 А1 известен агрегат для внесения жидких активных веществ. В агрегате содержатся:
- несущее транспортное средство,
- опрыскивающий трубопровод, расположенный на несущем транспортном средстве на регулируемом по высоте параллелограммном механизме с возможностью движения вокруг проходящей параллельно продольной оси несущего транспортного средства поворотной оси,
- расположенный на опрыскивающем трубопроводе датчик ускорения, расположенный на параллелограммном механизме датчик ускорения, а также
- первый опорный датчик в виде расположенного на несущем транспортном средстве датчика ускорения, и
- второй опорный датчик в виде гиростата или расположенного в области рамы несущего транспортного средства датчика частоты вращения,
- перерабатывающее выходные сигналы одного или нескольких датчиков в управляющие сигналы регулирующее устройство,
- исполнительный элемент в виде гидравлического цилиндра, влияющий на поворотное положение опрыскивающего трубопровода в зависимости от управляющих сигналов регулирующего устройства, а также
- исполнительный элемент в виде гидравлического цилиндра, влияющий расстояние от параллелограммного механизма до почвы в зависимости от управляющих сигналов регулирующего устройства.
С помощью сгенерированных регулирующим устройством управляющих сигналов предотвращаются позиционные изменения однажды настроенной вручную позиции и ориентации опрыскивающего трубопровода при торможениях, ускорениях упругом прогибе или же обратном ходе рессор несущего транспортного средства или при переезде через неровности почвы. Ошибки, вкравшиеся вследствие разного позиционирования датчиков ускорения и опорных датчиков, могут быть скомпенсированы точнее посредством опорных датчиков. Регулирование неизменного расстояния от опрыскивающего трубопровода до почвы не раскрыто.
Ради полноты следует упомянуть, что, помимо этого, известны опрыскивающие трубопроводы, состоящие из перемещаемых относительно друг друга сегментов, чтобы при очень большой рабочей ширине дать возможность адаптации к контуру почвы по участкам. Опрыскивающий трубопровод, который обладает составленными из сегментов консолями, известен из DE 32 02 569 А1. При этом отдельные сегменты связаны между собой, причем перемещение отдельных сегментов относительно друг друга происходит пассивно. Для того чтобы осуществить процесс поворота, для данного механизма необходим опорный элемент с наружной стороны каждой консоли.
Задачей изобретения является разработка агрегата для внесения жидких и/или твердых активных веществ с несущим транспортным средством и по меньшей мере одним трубопроводом, расположенным с возможностью поворота вокруг по меньшей мере одной поворотной оси, проходящей, преимущественным образом, параллельно продольной оси несущего транспортного средства, с отстоящими с обеих сторон несущего транспортного средства консолями, такого как, например, полевого опрыскивателя, который дает возможность как можно более точного соблюдения расстояний консолей относительно поверхности почвы даже при неровных почвах и при движущемся или испытывающем поперечную качку несущем транспортном средстве, а также указание способа управления таким агрегатом, с помощью которого становится возможным как можно более точное соблюдение расстояний консолей относительно поверхности почвы даже при неровных почвах и при движущемся или испытывающем поперечную качку несущем транспортном средстве.
Данная задача решена соответственно посредством отличительных признаков независимых пунктов формулы изобретения.
Отличительные признаки предпочтительных усовершенствований изобретения вытекают из зависимых пунктов формулы изобретения, последующей общей описательной части, чертежей, а также из соответствующей части с описаниями фигур.
Соответственно этому первый предмет изобретения относится к агрегату для внесения жидких и/или твердых активных веществ. В агрегате содержатся:
- несущее транспортное средство,
- по меньшей мере один трубопровод, такой как, например, расположенный с возможностью поворота вокруг по меньшей мере одной поворотной оси опрыскивающий трубопровод, проходящей, преимущественным образом, параллельно продольной оси несущего транспортного средства, с отстоящими с обеих сторон несущего транспортного средства консолями, а также с расположенными на них, соединенными и/или соединяемыми с накопителем для по меньшей мере одного жидкого и/или твердого активного вещества средствами для внесения, такого как, например, с соединенными и/или соединяемыми с баком для препарата для опрыскивания распылительными соплами,
- по меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода вокруг поворотной оси относительно опорной плоскости,
- по меньшей мере одна сенсорная структура для регистрации поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости,
- перерабатывающее выходные сигналы сенсорных структур в управляющие сигналы регулирующее устройство,
- по меньшей мере один влияющий в зависимости от управляющих сигналов регулирующего устройства на поворотное положение трубопровода вокруг поворотной оси относительно несущего транспортного средства, называемый также исполнительным органом исполнительный элемент, например в виде одного или нескольких гидравлических цилиндров, который преобразует управляющие сигналы в механическое движение или в другую физическую величину, такую как, например, давление, и тем самым создает вызывающую момент вращения на трубопроводе силу или вызывающую момент вращения на трубопроводе пару сил,
причем для определения поворотного положения трубопровода вокруг поворотной оси относительно, например, совпадающей с опорной плоскостью начальной ориентации регулирующее устройство
- посредством интегрирования скорости поворота по времени рассчитывает поворотное положение трубопровода относительно опорной плоскости, вследствие чего, с одной стороны, ни несущее транспортное средство, ни линейные ускорения не оказывают возмущающего воздействия на расчет поворотного положения, но, с другой стороны, погрешности измерений тоже интегрируются и вызывают называемый в дальнейшем угловым дрейфом дрейф поворотного положения, и
- для компенсации углового дрейфа объединяет рассчитанное с помощью скорости поворота поворотное положение трубопровода с поворотным положением трубопровода, зарегистрированным для определения текущего положения трубопровода относительно опорной плоскости, чтобы из этого сформировать отводящий трубопровод из его текущего поворотного положения в заданное поворотное положение относительно опорной плоскости управляющий сигнал.
Посредством интегрирования по времени частоты вращения, называемой скоростью поворота, получают воспроизводящий поворотное положение трубопровода относительно опорной плоскости угол поворота. При этом возмущения, вносимые несущим транспортным средством или линейными ускорениями, не оказывают влияния на расчет, тогда как погрешности измерений тоже интегрируются и вызывают угловой дрейф угла поворота. Хотя измерение поворотного положения относительно опорной плоскости, например посредством измерения относительного поворота между несущим транспортным средством и трубопроводом или посредством измерения угла наклона к ускорению свободного падения, имеет недостаток, состоящий во влиянии возмущений, вызываемых поворотными движениями несущего транспортного средства или линейными ускорениями, как они встречаются, например, при движении по кривой, тем не менее, этому противостоит преимущество, состоящее в том, что такой вид регистрации поворотного положения не подвержен угловому дрейфу.
Посредством объединения рассчитанного и называемого зарегистрированным поворотным положением измеренного поворотного положения текущее поворотное положение относительно опорной плоскости определяют очень точно, причем используют только преимущества соответствующего метода измерений без необходимости мириться с его недостатками.
Преимуществами по сравнению с современным состоянием техники являются получение измерительной системы, состоящей по меньшей мере из одной сенсорной структуры для регистрации скорости поворота трубопровода вокруг поворотной оси относительно опорной плоскости, по меньшей мере одной сенсорной структуры для регистрации поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости и перерабатывающего выходные сигналы сенсорных структур в управляющие сигналы регулирующего устройства, которая воспроизводит текущее поворотное положение и поворотные движения трубопровода относительно опорной плоскости независимо от несущего транспортного средства и из этого образует управляющие сигналы для регулирования постоянной ориентации трубопровода относительно опорной плоскости. Для определения текущего поворотного положения применяются и объединяются две измерительные системы, которые базируются на разных физических принципах. Благодаря этому подавляются недостатки каждого из методов измерений.
По меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода вокруг поворотной оси относительно опорной плоскости может содержать расположенный на трубопроводе и регистрирующий скорость поворота трубопровода датчик частоты вращения.
При этом для регистрации скорости поворота применяется датчик частоты вращения, который смонтирован непосредственно на трубопроводе. Таким образом, поворотные движения несущего транспортного средства не оказывают влияния на определение скорости поворота трубопровода. Следовательно, пропорциональный измеренной величине или отображающий ее выходной сигнал датчика частоты вращения соответствует поворотному движению трубопровода относительно произвольной опорной плоскости, например относительно поверхности земли или же ортогонально ускорению свободного падения или относительно отображающей усредненный профиль почвы длительной ориентации несущего транспортного средства.
Датчик частоты вращения, регистрирующий данную измеренную величину или же пропорциональный данной измеренной величине или отображающий ее, служащий входной величиной регулирующего устройства, вливающейся в управляющие сигналы на исполнительный элемент или исполнительные элементы, выходной сигнал скоростей поворота трубопровода, может быть применен для того, чтобы получить активное демпфирование трубопровода в виде активно вводимого момента торможения.
Альтернативно или дополнительно, по меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода вокруг поворотной оси относительно опорной плоскости может содержать по меньшей мере один расположенный на несущем транспортном средстве датчик частоты вращения, чтобы измерять скорости поворота несущего транспортного средства по меньшей мере вокруг его продольной оси и вместе с тем поворотные движения несущего транспортного средства, представляющие собой возмущающие движения.
При этом по меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода вокруг поворотной оси относительно опорной плоскости может дополнительно содержать по меньшей мере один регистрирующий относительный поворот между несущим транспортным средством и трубопроводом датчик угла поворота или датчик угловой скорости вращения, так что тогда из обоих измеренных значений, скорости поворота несущего транспортного средства относительно его продольной оси, а также относительного поворота между несущим транспортным средством и трубопроводом, может быть определена абсолютная скорость поворота трубопровода вокруг поворотной оси.
Альтернативно датчику частоты вращения или дополнительно к нему, по меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода вокруг поворотной оси относительно опорной плоскости может содержать датчик углового ускорения. Посредством интегрирования его выходного сигнала по времени может быть получена мера скорости поворота.
Альтернативно датчику частоты вращения и/или датчику углового ускорения или дополнительно к ним, по меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода вокруг поворотной оси относительно опорной плоскости может типичным образом содержать по меньшей мере два расположенных в области консолей трубопровода, например на их концах, датчика ускорения. Здесь следует, однако, упомянуть, что может быть достаточно также лишь одного датчика, который может быть расположен в области одной из консолей трубопровода, например на конце. Его выходным сигналом или выходными сигналами нескольких датчиков отображаются линейные ускорения на концах консолей. Разность выходных сигналов двух расположенных на противоположных концах консолей датчиков ускорения, умноженная на ширину трубопровода, дает угловые ускорения, посредством интегрирования которых по времени опять же получается скорость поворота.
Согласно этому при обобщении становится очевидным, что средства для определения скорости поворота трубопровода вокруг поворотной оси относительно опорной плоскости могут содержать один или несколько расположенных на трубопроводе инерциальных датчиков.
Инерциальные датчики служат для измерения ускорений и частот вращения. Посредством комбинирования нескольких инерциальных датчиков в измерительный блок, называемый также "inertial measurement unit" (инерциальный измерительный блок) IMU, который может иметь жесткий корпус, ускорения могут быть измерены в нескольких степенях свободы, число которых достигает шести (три линейные и три вращательные степени свободы). IMU является основной составной частью инерционной навигационной системы, называемой также инерциальной навигационной системой.
Примерами инерциальных датчиков являются датчики ускорения и датчики частоты вращения.
Датчик частоты вращения регистрирует скорость вращения или же скорость поворота тела вокруг заданной оси вращения или поворотной оси, причем выходной сигнал датчика частоты вращения, преимущественным образом, однозначно пропорционален зарегистрированной скорости поворота.
Из этого посредством интегрирования скорости поворота по интервалу времени можно вывести, на какой угол повернулось тело за интервал времени.
Частоты вращения вокруг трех пространственных осей называются:
- частотой вращения при рыскании (поворот вокруг вертикальной оси, по англ. yaw),
- частотой вращения при продольной качке (поворот вокруг поперечной оси, по англ. pitch),
- частотой вращения при поперечной качке (при не наземных транспортных средствах также частотой вращения при бортовой качке (вращение вокруг продольной оси, по англ. roll)).
Принцип измерений базируется по существу на двух принципах измерений, во-первых, на силе Кориолиса, которая действует на механически движимую систему, и, во-вторых, на эффекте Саньяка, который наблюдается на источнике света.
Примерами механически движимых систем, использующих силу Кориолиса, являются:
- маятник Фуко,
- гирокомпас,
- гироскоп с регулируемыми динамическими характеристиками (dynamically tuned gyro (DTG)), погрешность измерений менее 1°/час,
- вибрационный гироскоп, погрешность измерений менее 10°/час, жужжальца насекомых.
Примерами оптических систем, использующих эффект Саньяка, являются:
- кольцевой лазер (RLG), погрешность измерений менее 0,001°/час,
- волоконно-оптический гироскоп (FOG), погрешность измерений менее 1°/час.
В инерциальных измерительных блоках содержатся, как правило, следующие типы датчиков:
- три ортогонально расположенных датчика ускорения (называемых также преобразовательными датчиками) детектируют линейные ускорения по оси x, или же y, или же z, из чего с помощью двукратного интегрирования может быть рассчитано линейное перемещение;
- три ортогонально расположенных датчика частоты вращения (называемых также гироскопическими датчиками) измеряют угловую скорость вокруг оси x, или же y, или же z, из чего с помощью однократного интегрирования может быть рассчитано круговое перемещение.
Для определения констант интегрирования, и/или для улучшения точности, и/или для того, чтобы скорректировать дрейф датчиков, дополнительно могут быть предусмотрены, например, датчики магнитного поля, такие как, например, компасные датчики, и/или устройства для приема сигналов от имеющейся и/или будущей глобальной навигационной спутниковой системы, называемой также Global Navigation Satellite System (GNSS), такой как, например:
- GPS (Global Positioning System - глобальная система позиционирования) Соединенных Штатов Америки, и/или
- GLONASS (GLObal Navigation Satellite System - глобальная навигационная спутниковая система) Российской Федерации, и/или
- система Galileo Европейского Союза, и/или
- система Beidou Китайской Народной Республики.
По меньшей мере одна сенсорная структура для регистрации поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости может содержать по меньшей мере один регистрирующий относительный поворот между несущим транспортным средством и трубопроводом относительно поворотной оси датчик.
По меньшей мере один датчик для регистрации относительного поворота между несущим транспортным средством и трубопроводом может быть датчиком угла поворота, расположенным между трубопроводом и несущим транспортным средством.
Альтернативно или дополнительно, регистрация относительного поворота между несущим транспортным средством и трубопроводом может быть осуществлена с помощью по меньшей мере одного датчика наклона, регистрирующего угол между несущим транспортным средством и опорной плоскостью, и с помощью по меньшей мере одного датчика наклона, регистрирующего угол между трубопроводом и опорной плоскостью, причем разность зарегистрированных датчиками угла между несущим транспортным средством и опорной плоскостью и угла между трубопроводом и опорной плоскостью пропорциональна относительному повороту между несущим транспортным средством и трубопроводом.
Посредством объединения рассчитанного с помощью зарегистрированной датчиками скорости поворота поворотного положения трубопровода с зарегистрированным датчиками непосредственно с помощью датчика угла поворота или опосредованно посредством образования разности наклонов трубопровода и несущего транспортного средства по отношению к опорной плоскости относительным поворотом между несущим транспортным средством и трубопроводом может быть взята за основу опорная плоскость, соответствующая длительной ориентации несущего транспортного средства и воспроизводящая усредненный профиль почвы.
Альтернативно или дополнительно, по меньшей мере одна сенсорная структура для регистрации поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости может содержать по меньшей мере один регистрирующий угол между трубопроводом и опорной плоскостью датчик наклона.
Посредством объединения рассчитанного с помощью скоростью поворота поворотного положения трубопровода с зарегистрированным с помощью регистрации угла между трубопроводом и опорной плоскостью поворотным положением трубопровода может быть взята за основу соответствующая искусственному горизонту опорная плоскость.
Хотя датчики наклона имеют недостаток, состоящий в том, что они подвержены ошибкам при поперечных ускорениях, тем не менее, посредством объединения с рассчитанным с помощью скорости поворота поворотным положением трубопровода этот недостаток компенсируется.
В соответствии с этим обобщенно опорная плоскость может представлять собой или искусственный горизонт, причем по меньшей мере одна сенсорная структура для регистрации поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости предпочтительно содержит датчик наклона, или длительную ориентацию несущего транспортного средства, причем по меньшей мере одна сенсорная структура для регистрации поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости предпочтительно содержит регистрацию относительного поворота между несущим транспортным средством и трубопроводом, например с помощью датчика угла поворота, регистрирующего угол между трубопроводом и несущим транспортным средством.
Для определения текущего поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости посредством объединения рассчитанного с помощью скорости поворота поворотного положения трубопровода с зарегистрированным датчиками непосредственно или опосредованно посредством образования разности поворотным положением трубопровода, регулирующее устройство, преимущественным образом, снабжено выполняющими фильтрацию Кальмана средствами.
Альтернативно или дополнительно, для определения текущего поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости посредством объединения рассчитанного с помощью скорости поворота поворотного положения трубопровода с зарегистрированным датчиками непосредственно или опосредованно посредством образования разности поворотным положением трубопровода регулирующее устройство может быть оснащено средствами для низкочастотной фильтрации зарегистрированного датчиками поворотного положения, а также средствами для сравнения подвергнутого низкочастотной фильтрации, зарегистрированного датчиками поворотного положения при непрерывной коррекции на нуль с рассчитанным с помощью скорости поворота поворотным положением, чтобы скомпенсировать угловой дрейф.
Регулирующее устройство регулирует поворотное положение трубопровода вокруг поворотной оси вдоль направления движения несущего транспортного средства и/или управляет этим поворотным положением с помощью по меньшей мере одного исполнительного элемента, содержащего, например, по меньшей мере один гидравлический цилиндр.
Регулирующее устройство может допускать работу в ручном режиме, при котором исполнительный элемент, влияющий на поворотное положение трубопровода вокруг поворотной оси относительно несущего транспортного средства, не предпринимает активного управления и трубопровод проводится, например, почти без усилия управления.
В ручном режиме работы по меньшей мере одна часть трубопровода, например по меньшей мере расположенная между консолями средняя часть, при рассмотрении в течение длительного промежутка времени следует за движением несущего транспортного средства, так оно следует в основном за рельефом пашни и тем самым за контуром поля.
Высокочастотные движения поперечных колебаний несущего транспортного средства не должны оказывать влияния на поворотное положение трубопровода относительно опорной плоскости, соответствующей длительной ориентации несущего транспортного средства или искусственному горизонту.
Помимо этого, регулирующее устройство допускает работу в автоматическом режиме, при котором исполнительный элемент выполняет активные движения, чтобы таким образом подогнать поворотное положение трубопровода относительно опорной плоскости.
Изобретение позволяет выполнять очень точное определение текущего поворотного положения трубопровода относительно опорной плоскости. По сравнению с определением поворотного положения с помощью нескольких ультразвуковых датчиков это является менее затратным и менее дорогостоящим.
Дополнительно агрегат может содержать влияющий в зависимости от управляющих сигналов регулирующего устройства на среднее расстояние от трубопровода до почвы или насаждений исполнительный элемент в виде одного или нескольких гидравлических цилиндров, который преобразует управляющие сигналы в механическое движение или другую физическую величину, такую как, например, давление, и тем самым воздействует на трубопровод поднимающей или опускающей трубопровод силой. В принципе вместо гидравлических цилиндров могут быть применены также другие подходящие исполнительные элементы, например пневматические, электромеханические или электродвигательные исполнительные элементы.
Помимо этого, агрегат может содержать по меньшей мере одну сенсорную структуру для регистрации по меньшей мере одного среднего расстояния от трубопровода до почвы или насаждений. Преимущественным образом, такая сенсорная структура содержит обычно по меньшей мере по одному датчику расстояния, расположенному на каждом конце консолей трубопровода. С помощью расположенных на концах консолей трубопровода датчиков расстояния и посредством соответствующего учета их выходных сигналов при формировании управляющих сигналов с помощью регулирующего устройства может быть повышена надежность, с которой может быть предотвращено контактирование трубопровода или расположенных на нем средств для внесения твердых и/или жидких активных веществ, таких как, например, распылительных сопел, с почвой и/или с насаждениями. Следует указать на то, что сенсорная структура может на выбор содержать только один единственный датчик расстояния на конце одной из консолей трубопровода. С помощью такого датчика расстояния, расположенного на конце одной из консолей трубопровода, и посредством соответствующего учета его выходного сигнала при формировании управляющих сигналов с помощью регулирующего устройства может быть повышена надежность, с которой может быть предотвращено контактирование трубопровода или расположенных на нем средств для внесения твердых и/или жидких активных веществ, таких как, например, распылительных сопел, с почвой и/или с насаждениями.
Альтернативно или дополнительно, такая сенсорная структура может содержать по меньшей мере один датчик расстояния, расположенный на не превосходящей несущее транспортное средство по его ширине части трубопровода.
С помощью сигналов расстояния от датчиков регулирующее устройство может формировать по меньшей мере управляющие сигналы, предусмотренные для по меньшей мере одного исполнительного элемента, влияющего на среднее расстояние от трубопровода до почвы или насаждений.
Для того чтобы по возможности исключить влияния неравномерных распределений масс трубопровода, поворотная ось проходит, преимущественным образом, через центр тяжести трубопровода.
По меньшей мере один трубопровод может быть расположен на несущем транспортном средстве долговременно или с возможностью замены на другой агрегат для сельскохозяйственной обработки почвы и/или насаждений.
При этом несущее транспортное средство может быть приводимым в движение или буксируемым, так что:
- в случае приводимого в движение несущего транспортного средства с долговременно расположенным трубопроводом агрегатом образуется самодвижущееся сельскохозяйственное орудие или же сельскохозяйственное самоходное орудие,
- в случае буксируемого несущего транспортного средства с долговременно расположенным трубопроводом агрегатом образуется буксируемое сельскохозяйственное орудие, такое как, например, сельскохозяйственный прицеп, и
- в случае приводимого в движение несущего транспортного средства с трубопроводом, расположенным, например, на трехточечной навесной системе или на предусмотренной для этого грузовой платформе с возможностью замены на другой агрегат для сельскохозяйственной обработки почвы и/или насаждений, агрегатом образуется или навесное орудие, или сборное орудие.
Дополнительные к уже названным преимущества по сравнению с современным уровнем техники получаются благодаря полному решению поставленной задачи с устранением всех недостатков современного уровня техники.
В дополнение к этому благодаря точному соблюдению расстояний от консолей до поверхности почвы и/или до насаждений независимо от движущегося и/или испытывающего поперечную качку несущего транспортного средства надежно предотвращается контактирование консолей с почвой.
Второй предмет изобретения относится к способу управления ранее описанным агрегатом с помощью регулирования поворотного положения расположенного на несущем транспортном средстве подвижно вокруг поворотной оси трубопровода агрегата в зависимости от текущего поворотного положения, причем для определения текущего поворотного положения предусмотрено следующее:
- регистрируют скорость поворота трубопровода вокруг поворотной оси относительно опорной плоскости,
- независимо от скорости поворота регистрируют поворотное положение трубопровода вокруг поворотной оси относительно опорной плоскости,
- посредством интегрирования скорости поворота по времени рассчитывают поворотное положение трубопровода относительно опорной плоскости, вследствие чего, с одной стороны, ни несущее транспортное средство агрегата, ни линейные ускорения не оказывают возмущающего влияния на расчет, но, с другой стороны, погрешности измерений тоже интегрируются и вызывают называемый в дальнейшем угловым дрейфом дрейф поворотного положения, и
- для компенсации углового дрейфа объединяют рассчитанное с помощью скорости поворота поворотное положение трубопровода с поворотным положением трубопровода, зарегистрированным для определения текущего положения трубопровода относительно опорной плоскости.
Посредством объединения рассчитанного поворотного положения и измеренного поворотного положения, называемого зарегистрированным поворотным положением, текущее поворотное положение относительно опорной плоскости определяют очень точно, причем используют только преимущества соответствующего метода измерений без необходимости мириться с его недостатками.
Данный способ предпочтительно предусматривает, чтобы посредством объединения рассчитанного с помощью скорости поворота поворотного положения трубопровода с зарегистрированным независимо от скорости поворота поворотным положением трубопровода, в каждом случае относительно опорной плоскости, сформировать отводящий трубопровод из его текущего поворотного положения в заданное поворотное положение относительно опорной плоскости управляющий сигнал.
Способ может предусматривать регистрацию скорости поворота с помощью расположенного на трубопроводе и регистрирующего скорость поворота трубопровода датчика частоты вращения.
При этом для регистрации скорости поворота применяют датчик частоты вращения, который смонтирован непосредственно на трубопроводе. Таким образом, поворотные движения несущего транспортного средства не оказывают влияния на определение скорости поворота трубопровода. Следовательно, выходной сигнал датчика частоты вращения, пропорциональный измеренной величине или отображающий ее, соответствует поворотному движению трубопровода относительно произвольной опорной плоскости, например относительно поверхности земли или же ортогонально ускорению свободного падения или относительно длительной ориентации несущего транспортного средства, отображающей усредненный профиль почвы.
Данная измеренная величина или пропорциональный данной измеренной величине или отображающий ее, вливающийся в управляющий сигнал или управляющие сигналы выходной сигнал от датчика частоты вращения, регистрирующего скорости поворота трубопровода, может быть использован для того, чтобы получить активное демпфирование трубопровода в виде активно вводимого момента торможения.
Альтернативно или дополнительно, способ может предусматривать регистрацию скорости поворота трубопровода с помощью скорости поворота несущего транспортного средства вокруг его проходящей параллельно поворотной оси продольной оси, сопровождающейся относительным поворотом между несущим транспортным средством и трубопроводом, так что тогда из обоих измеренных значений, скорости поворота несущего транспортного средства относительно его продольной оси, а также относительного поворота между несущим транспортным средством и трубопроводом, может быть определена абсолютная скорость поворота трубопровода вокруг поворотной оси. Для этого может быть предусмотрено расположение на несущем транспортном средстве агрегата датчика частоты вращения, чтобы регистрировать называемую также частотой вращения при поперечной качке скорость поворота несущего транспортного средства вокруг своей продольной оси, и выполнение между несущим транспортным средством и трубопроводом датчика угла поворота или датчика угловой скорости вращения.
Для этого альтернативно или дополнительно, могут быть предусмотрены регистрация углового ускорения и получение скорости поворота посредством интегрирования по времени.
Альтернативно или дополнительно, могут быть предусмотрены регистрация линейных ускорений в области консолей трубопровода, преимущественным образом на противоположных концах консолей, и с помощью разности линейных ускорений на противоположных концах консолей расчет сначала углового ускорения трубопровода и посредством интегрирования по времени - опять же скорости поворота.
Дополнительно к вышеупомянутым примерам выполнения, включающим в себя регистрацию относительного поворота между несущим транспортным средством и трубопроводом, или вместо них способ может предусматривать регистрацию относительного поворота между несущим транспортным средством и трубопроводом с помощью разности между поворотным положением трубопровода вокруг поворотной оси относительно опорной плоскости и поворотным положением несущего транспортного средства вокруг его проходящей параллельно поворотной оси продольной оси относительно опорной плоскости, причем разность между зарегистрированным датчиками углом между несущим транспортным средством и опорной плоскостью и углом между трубопроводом и опорной плоскостью пропорциональна относительному повороту между несущим транспортным средством и трубопроводом. Для регистрации поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости и поворотного положения несущего транспортного средства вокруг его проходящей параллельно поворотной оси продольной оси относительно опорной плоскости могут быть предусмотрены соответственно на трубопроводе и на несущем транспортном средстве датчики угла наклона, регистрирующие угол наклона между трубопроводом и вертикалью и/или горизонталью или же между несущим транспортным средством и вертикалью и/или горизонталью.
Способ может посредством объединения поворотного положения трубопровода, рассчитанного с помощью зарегистрированной скорости поворота, с рассчитанным и/или зарегистрированным относительным поворотом между несущим транспортным средством и трубопроводом предусматривать принятие за основу опорной плоскости, соответствующей длительной ориентации несущего транспортного средства и отображающей усредненный профиль почвы.
Для регистрации поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости способ может предусматривать, например с помощью датчика наклона, регистрацию угла наклона, отображающего угол между трубопроводом и опорной плоскостью.
Посредством объединения рассчитанного с помощью скорости поворота поворотного положения трубопровода с зарегистрированным посредством регистрации угла между трубопроводом и опорной плоскостью поворотным положением трубопровода может быть взята за основу соответствующая искусственному горизонту опорная плоскость.
Для определения текущего поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости посредством объединения рассчитанного с помощью скорости поворота поворотного положения трубопровода с зарегистрированным непосредственно или опосредованно посредством образования разности поворотным положением трубопровода способ может предусматривать выполнение фильтрации Кальмана.
Альтернативно или дополнительно, для определения текущего поворотного положения трубопровода вокруг поворотной оси относительно опорной плоскости посредством объединения рассчитанного с помощью скорости поворота поворотного положения трубопровода с зарегистрированным непосредственно или опосредованно посредством образования разности поворотным положением трубопровода способ может предусматривать выполнение низкочастотной фильтрации зарегистрированного поворотного положения, а также выполнение сравнения подвергнутого низкочастотной фильтрации, зарегистрированного поворотного положения при непрерывной коррекции на нуль с рассчитанным с помощью скорости поворота поворотным положением для компенсации углового дрейфа.
Способ позволяет использовать все преимущества описанного приспособления.
Наряду с применением в сочетании с описанным ранее агрегатом для внесения жидких и/или твердых активных веществ, данный способ пригоден для применения с любыми агрегатами для сельскохозяйственной обработки почвы и/или насаждений, в которых, будь то для ухода за почвой или насаждениями, отказываются от опирающихся на почву орудий и, тем не менее, требуется высокая точность проводки в заданном поворотном положении, например перпендикулярно или параллельно почве.
Как агрегат, так и способ альтернативно или дополнительно, могут иметь комбинацию из нескольких отличительных признаков, описанных вначале в связи с современным состоянием техники и/или в одном или нескольких упомянутых с современным состоянии техники документах.
Сверх этого, альтернативно или дополнительно, агрегат может иметь отдельные из ранее описанных в связи со способом отличительных признаков или комбинацию нескольких из них, также как способ Альтернативно или дополнительно, может иметь отдельные из ранее описанных в связи с агрегатом отличительных признаков или комбинацию нескольких из них.
Является очевидным, что изобретение может быть реализовано посредством регулирования опрыскивающего трубопровода с помощью по меньшей мере одного инерциального датчика, такого как, например, датчика частоты вращения, может быть гироскопа, который предусмотрен на опрыскивающем трубопроводе и/или на части опрыскивающего трубопровода, например на средней части. Инерциальный датчик регистрирует эффективную скорость поворота опрыскивающего трубопровода и/или части опрыскивающего трубопровода независимо от движения несущего транспортного средства. На основе зарегистрированной скорости поворота осуществляется активное демпфирование и/или регулирование. С помощью интегрирования скорости поворота по времени может быть рассчитан фактический угол кручения, называемый поворотным положением относительно опорной плоскости.
С помощью датчика угла, например датчика угла поворота, дополнительно регистрируют поворотное положение опрыскивающего трубопровода и/или части опрыскивающего трубопровода относительно несущего транспортного средства, посредством чего определяют абсолютную позицию угла поворота опрыскивающего трубопровода или части опрыскивающего трубопровода относительно несущего транспортного средства.
Посредством объединения полученной с помощью выходных сигналов датчиков информации датчиков о скорости поворота, или же о частоте вращения, и об абсолютной позиции угла поворота, или же о поворотном положении, и соответствующей фильтрации, например с помощью фильтра Кальмана, можно проводить опрыскивающий трубопровод или снабженную инерциальным датчиком часть опрыскивающего трубопровода несущим транспортным средством без возмущающих воздействий на положение и ориентацию опрыскивающего трубопровода или части опрыскивающего трубопровода, оказываемых высокочастотными движениями поперечной качки.
Альтернативами датчику частоты вращения, например в виде гироскопа, могут быть один или несколько датчиков углового ускорения или симметрично расположенные датчики углового ускорения, выходные сигналы которых используются в расчетах. Если, например, предусмотрено два симметрично расположенных датчика углового ускорения в разных направлениях, то с помощью угловых ускорений одного и другого датчиков углового ускорения может быть зарегистрировано угловое ускорение в каждом из направлений и посредством интегрирования зарегистрированного углового ускорения по времени может быть рассчитана скорость поворота в соответствующем направлении.
В соответствии с этим изобретение обобщенно предусматривает, что текущее положение трубопровода следует относить к опорной плоскости, чтобы можно было регулировать поворотное положение трубопровода или же чтобы можно было регулировать трубопровод под определенным углом независимо от движений несущего транспортного средства. Данная опорная плоскость может быть горизонтальной плоскостью, проходящей ортогонально ускорению свободного падения, или может соответствовать длительной ориентации несущего транспортного средства.
Для этого изобретение предусматривает объединение двух измеренных сигналов, полученных независимыми друг от друга методами измерений, во-первых, рассчитанного поворотного положения трубопровода и, во-вторых, измеренного, или же зарегистрированного, поворотного положения трубопровода, в объединенный управляющий или же измеренный сигнал.
Объединенный измеренный сигнал представляет собой текущее поворотное положение трубопровода относительно опорной плоскости, соответственно угол поворота между трубопроводом и опорной плоскостью. При этом опорная плоскость соответствует, преимущественным образом, искусственному горизонту или длительной ориентации несущего транспортного средства. Результат не чувствителен к вращательным и линейным движениям несущего транспортного средства и не подвержен угловому дрейфу. Помимо этого, данный объединенный измеренный сигнал является также не запаздывающим во времени относительно фактического поворотного движения и, таким образом, исключительно подходит для регулирования, которое не имеет нежелательной связи с несущим транспортным средством, прежде всего не связано по высокой частоте.
Важно подчеркнуть, что поворачиваемая вокруг по меньшей мере одной поворотной оси, проходящей, преимущественным образом, параллельно продольной оси несущего транспортного средства, структура трубопровода на несущем транспортном средстве содержит как поворачиваемую вокруг по меньшей мере одной поворотной оси, проходящей, преимущественным образом, параллельно продольной оси несущего транспортного средства, структуру жесткого самого по себе или шарнирного трубопровода, так и содержит поворачиваемую вокруг по меньшей мере одной поворотной оси, проходящей, преимущественным образом, параллельно продольной оси несущего транспортного средства, структуру двух расположенных на несущем транспортном средстве или на средней части трубопровода с возможностью поворота вокруг каждой из собственных поворотных осей, проходящих, преимущественным образом, параллельно продольной оси несущего транспортного средства, консолей трубопровода.
Изобретение и его преимущества разъясняются в последующем подробнее с помощью изображенных на фигурах примеров выполнения. Соотношения размеров отдельных элементов относительно друг друга на фигурах не всегда соответствуют реальным соотношениям размеров, так как некоторые формы изображены на фигурах упрощенно, а другие формы для лучшей наглядности изображены с увеличением по отношению к другим элементам. Для одинаковых или действующих одинаково элементов изобретения применяются идентичные ссылочные обозначения. Помимо этого ради обзорности на отдельных фигурах изображаются только те ссылочные обозначения, которые необходимы для описания соответствующих фигур. Изображенные формы выполнения представляют собой лишь примеры того, как может быть оформлена соответствующая изобретению распределительная коробка и не представляют собой окончательного ограничения. Показано в схематическом изображении:
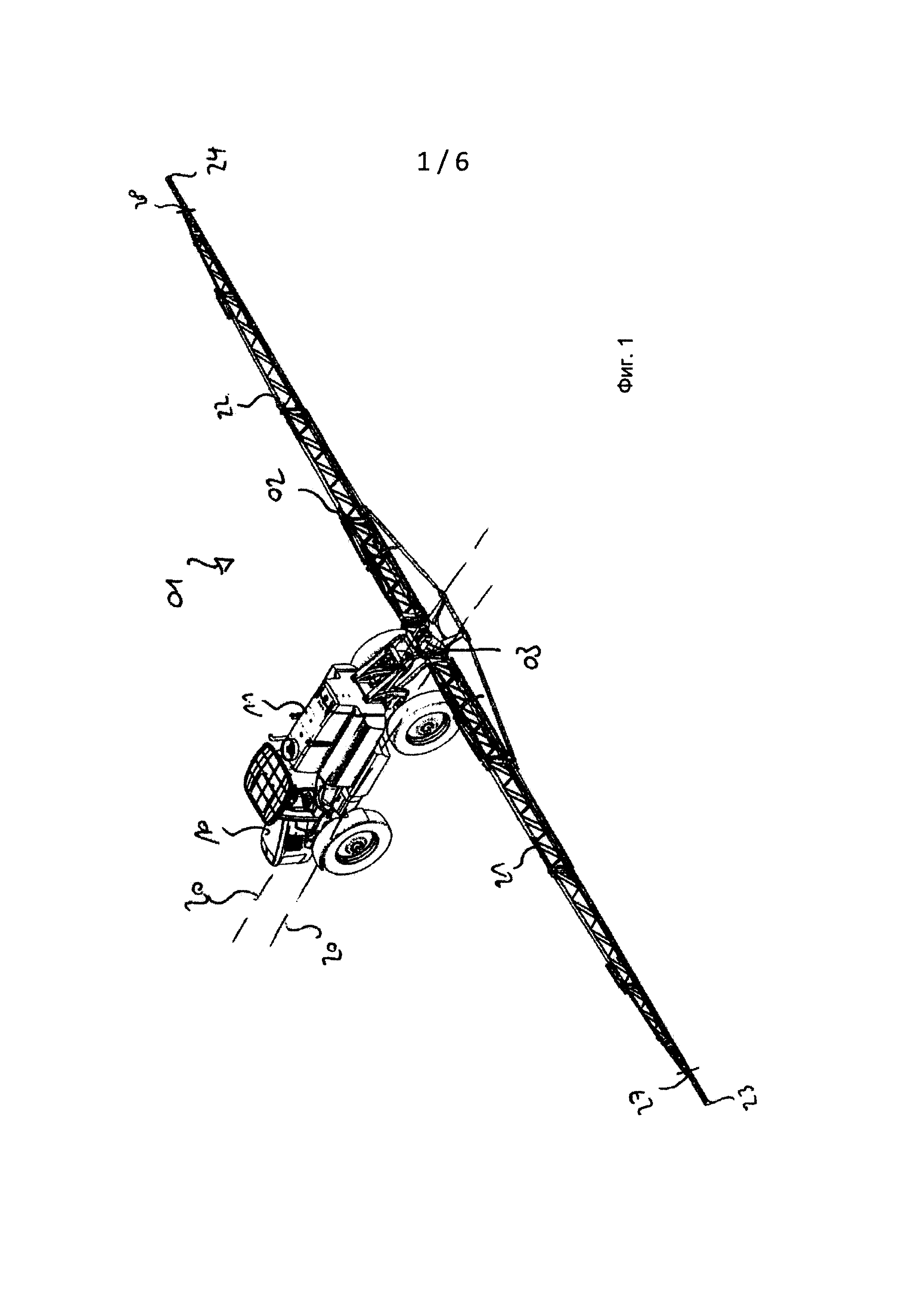
Фиг. 1 вид в перспективе на выполненный в виде самоходного полевого опрыскивателя агрегат для внесения жидких и/или твердых активных веществ,
Фиг. 2 вид в изометрии на трубопровод агрегата для внесения жидких и/или твердых активных веществ,
Фиг. 3 детальный вид в перспективе на поворачиваемую вокруг поворотной оси, проходящей, преимущественным образом, параллельно продольной оси несущего транспортного средства, структуру трубопровода агрегата для внесения жидких и/или твердых активных веществ,
Фиг. 4 вид спереди на трубопровод агрегата для внесения жидких и/или твердых активных веществ,
Фиг. 5 детальный вид на поворачиваемую вокруг поворотной оси, проходящей, преимущественным образом, параллельно продольной оси несущего транспортного средства, структуру трубопровода агрегата для внесения жидких и/или твердых активных веществ в виде спереди,
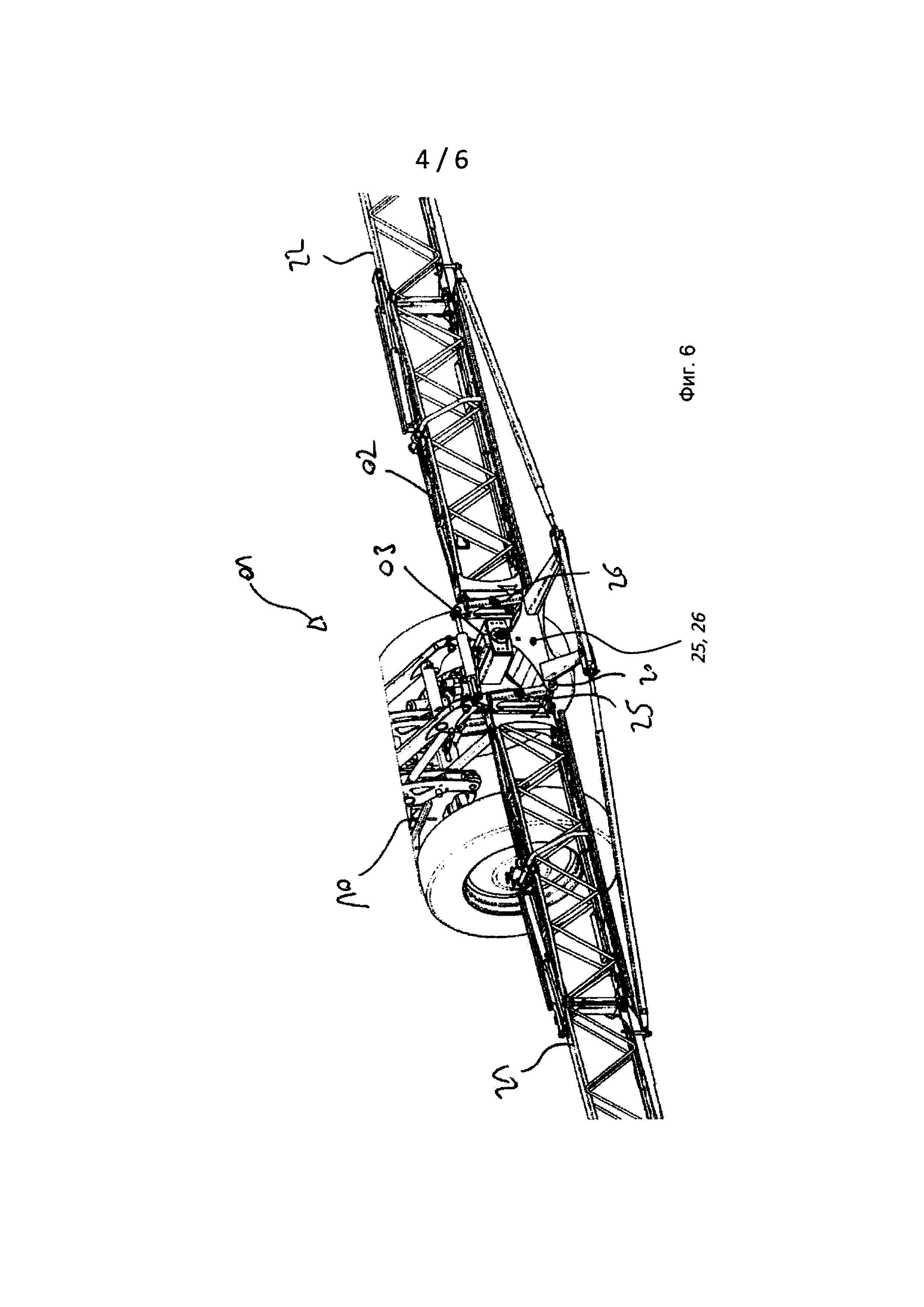
Фиг. 6 детальный вид на часть агрегата для внесения жидких и/или твердых активных веществ, изображающую поворачиваемую вокруг поворотной оси, проходящей, преимущественным образом, параллельно продольной оси несущего транспортного средства, структуру трубопровода агрегата для внесения жидких и/или твердых активных веществ, в виде в перспективе,
Фиг. 7 первый пример выполнения хода определения текущего поворотного положения трубопровода относительно опорной плоскости согласно способу управления агрегатом для внесения жидких и/или твердых активных веществ с помощью регулирования поворотного положения расположенного на несущем транспортном средстве подвижно вокруг поворотной оси трубопровода агрегата в зависимости от текущего поворотного положения,
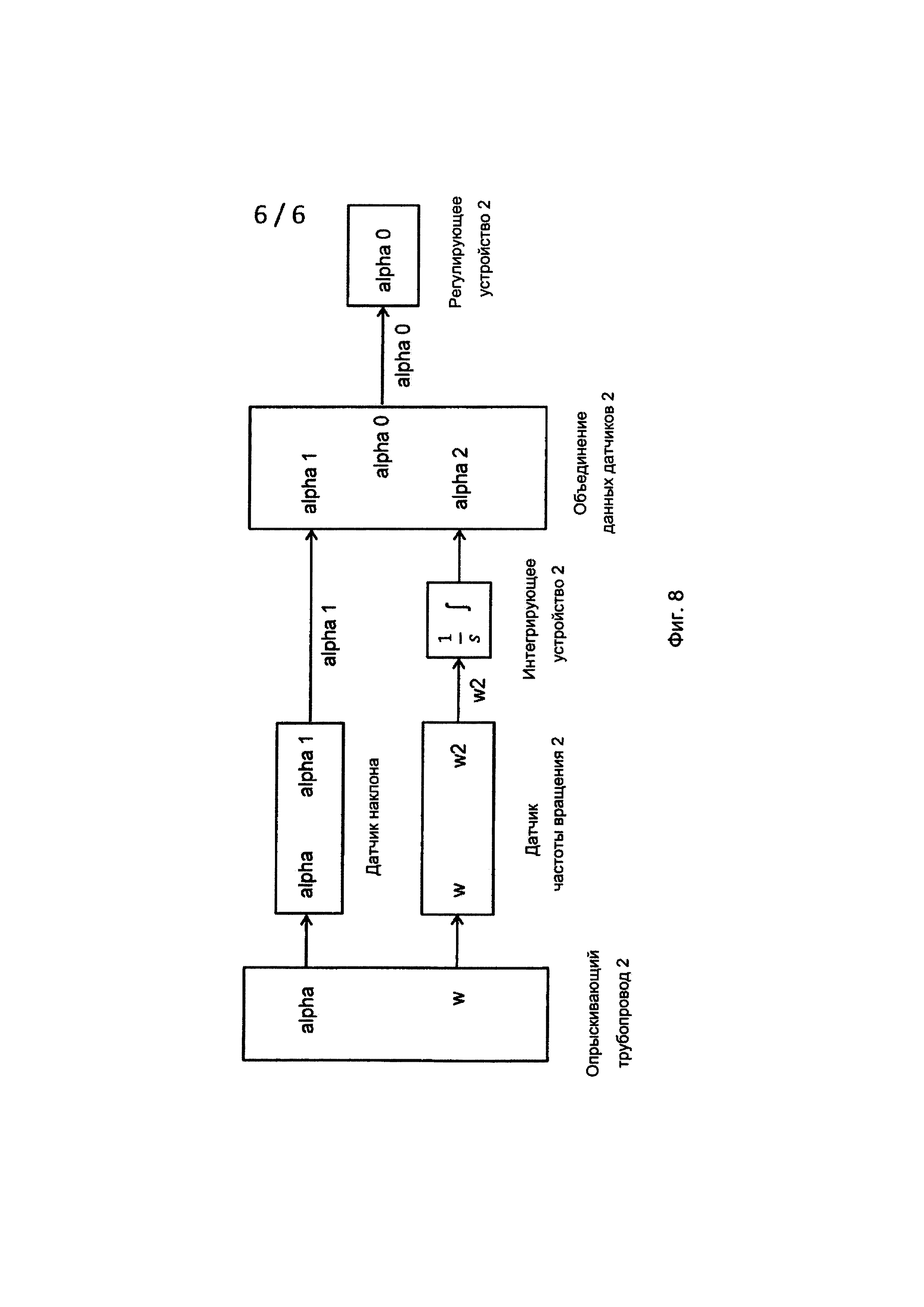
Фиг. 8 второй пример выполнения хода определения текущего поворотного положения трубопровода относительно опорной плоскости согласно способу управления агрегатом для внесения жидких и/или твердых активных веществ с помощью регулирования поворотного положения расположенного на несущем транспортном средстве подвижно вокруг поворотной оси трубопровода агрегата в зависимости от текущего поворотного положения.
В изображенном полностью или в деталях на фиг. 1, фиг. 2, фиг. 3, фиг. 4, фиг. 5, фиг. 6 агрегате 01 для внесения жидких и/или твердых активных веществ содержатся:
- несущее транспортное средство 10,
- по меньшей мере один расположенный с возможностью поворота вокруг по меньшей мере одной поворотной оси 20, проходящей, преимущественным образом, параллельно продольной оси несущего транспортного средства 10 трубопровод 02 (или же консольный трубопровод - прим. переводчика), такой как, например, опрыскивающий трубопровод, с отстоящими с обеих сторон несущего транспортного средства 10 консолями 21, 22, а также с расположенными на них, соединенными и/или соединяемыми с накопителем 11 для по меньшей мере одного жидкого и/или твердого активного вещества средствами для внесения, такими как, например, с соединенными и/или соединяемыми с баком для препарата для опрыскивания распылительными соплами,
- по меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода или частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости,
- по меньшей мере одна сенсорная структура для регистрации поворотного положения трубопровода 02 вокруг поворотной оси 20 относительно опорной плоскости,
- перерабатывающее выходные сигналы сенсорных структур в управляющие сигналы регулирующее устройство,
- по меньшей мере один влияющий в зависимости от управляющих сигналов регулирующего устройства на поворотное положение трубопровода 02 вокруг поворотной оси относительно несущего транспортного средства 10, называемый также исполнительным органом исполнительный элемент 03, например в виде одного или нескольких гидравлических цилиндров, который преобразует управляющие сигналы в механическое движение или другую физическую величину, такую как, например, давление, и тем самым создает вызывающее момент вращения на трубопроводе 02 силу или вызывающую момент вращения на трубопроводе 02 пару сил,
причем для определения поворотного положения трубопровода 02 вокруг поворотной оси 20 по отношению, например, к совпадающей с опорной плоскостью начальной ориентации регулирующее устройство
- посредством интегрирования скорости w поворота по времени рассчитывает поворотное положение alpha2 трубопровода 02 относительно опорной плоскости, вследствие чего, с одной стороны, ни несущее транспортное средство 10, ни линейные ускорения не оказывают возмущающего воздействия на расчет поворотного положения, но, с другой стороны, погрешности измерений тоже интегрируются и вызывают называемый угловым дрейфом дрейф поворотного положения, и
- для компенсации углового дрейфа объединяет рассчитанное с помощью скорости w поворота поворотное положение alpha2 трубопровода 02 с поворотным положением alpha1 или же d_alpha1 трубопровода 02, зарегистрированным для определения текущего поворотного положения трубопровода 02 относительно опорной плоскости, чтобы из этого сформировать отводящий трубопровод 02 из его текущего поворотного положения в заданное поворотное положение относительно опорной плоскости управляющий сигнал.
По меньшей мере одна сенсорная структура для регистрации скорости w поворота трубопровода 02 или частей трубопровода 02, таких как, например, его консолей 21, 22, относительно опорной плоскости может содержать один или несколько датчиков 25, 26 частоты вращения, расположенных на трубопроводе 02 и регистрирующих скорость w поворота трубопровода 02 или частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20.
При этом для регистрации скорости поворота применяется, преимущественным образом, по меньшей мере один датчик 25, 26 частоты вращения, который смонтирован непосредственно на трубопроводе 02 или же на его средней части или на расположенной с возможностью поворота вокруг собственной поворотной оси 20 части трубопровода 02, такие как, например, на расположенной с возможностью поворота вокруг собственной поворотной оси 20 консоли 21, 22 трубопровода 02. Таким образом, поворотные движения несущего транспортного средства 10 не оказывают влияния на определение скорости поворота трубопровода 02 или скоростей поворота частей трубопровода 02. Следовательно, пропорциональный измеренной величине или отображающий ее выходной сигнал датчика 25, 26 частоты вращения соответствует поворотному движению трубопровода 02 или образованной, например, консолью 21, 22 части трубопровода 02 относительно произвольной опорной плоскости, например относительно поверхности земли или же ортогонально ускорению свободного падения или относительно отображающей усредненный профиль почвы длительной ориентации несущего транспортного средства 10.
Данная измеренная величина или же пропорциональный данной измеренной величине или отображающий ее, служащий входной величиной регулирующего устройства, вливающейся в управляющие сигналы на исполнительный элемент или исполнительные элементы 03, выходной сигнал датчика 25, 26 частоты вращения, регистрирующего скорости поворота трубопровода 02 или образованных консолями 21, 22 частей трубопровода 02, может быть использован для того, чтобы получить активное демпфирование трубопровода 02 в виде активно вводимого момента торможения.
По меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода 02 или частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости может содержать по меньшей мере два датчика 27, 28 ускорения, расположенных в области консолей 21, 22 трубопровода 02, например на их концах 23, 24. Их выходными сигналами отображаются линейные ускорения на концах 23, 24 консолей 21, 22. Разность выходных сигналов двух расположенных на противоположных концах 23, 24 консолей 21, 22 датчиков 27, 28 ускорения, умноженная на рабочую ширину и/или ширину трубопровода, или же на расстояние между обоими датчиками 27, 28 ускорения, дает угловые ускорения, посредством интегрирования которых по времени опять же получается скорость поворота.
По меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода 02 или частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости альтернативно может содержать по меньшей мере один расположенный на несущем транспортном средстве 10, называемый также датчиком угловой скорости вращения датчик частоты вращения, чтобы измерять скорости поворота несущего транспортного средства 10 по меньшей мере вокруг его проходящей параллельно по меньшей мере одной поворотной оси 20 продольной оси, и тем самым поворотные движения несущего транспортного средства 10, представляющие собой возмущающие движения. При этом по меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода 02 вокруг поворотной оси относительно опорной плоскости содержит, преимущественным образом, дополнительно по меньшей мере один регистрирующий относительный поворот между несущим транспортным средством 10 и трубопроводом 02 или между несущим транспортным средством 10 и, например, образованными консолями 21, 22 частями трубопровода 02 датчик угла поворота или датчик угловой скорости вращения, так что из обоих измеренных значений, скорости поворота несущего транспортного средства 10 относительно его продольной оси, а также относительного поворота между несущим транспортным средством 10 и трубопроводом 02 или между несущим транспортным средством 10 и образованными, например, посредством консолей 21, 22 частями трубопровода 02, может быть определена абсолютная скорость поворота трубопровода 02 или образованных, например, посредством консолей 21, 22 частей трубопровода 02 вокруг соответствующей, по меньшей мере одной поворотной оси 20. При этом с помощью датчика угла поворота непосредственно регистрируется относительный поворот между несущим транспортным средством 10 и трубопроводом 02 или же расположенными на несущем транспортном средстве 10 с возможностью поворота вокруг соответственно собственных поворотных осей, образованными, например, посредством консолей 21, 22 частями трубопровода 02, тогда как с помощью датчика угловой скорости вращения относительный поворот между несущим транспортным средством 10 и трубопроводом 02 или же расположенными на несущем транспортном средстве 10 с возможностью поворота вокруг соответственно собственных поворотных осей, образованными, например, посредством консолей 21, 22 частями трубопровода 02 определяется опосредованно, посредством интегрирования скорости поворота по времени.
По меньшей мере одна сенсорная структура для регистрации скорости поворота трубопровода 02 или частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси относительно опорной плоскости содержит вместо датчика частоты вращения или дополнительно к нему датчик углового ускорения. Посредством интегрирования его выходного сигнала по времени может быть определена мера скорости поворота.
По меньшей мере одна сенсорная структура для регистрации поворотного положения трубопровода 02 или частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости может содержать по меньшей мере один датчик, регистрирующий относительный поворот между несущим транспортным средством 10 и трубопроводом 02 или между несущим транспортным средством 10 и частями трубопровода 02, такими как, например, его консолями 21, 22, относительно по меньшей одной поворотной оси 20.
По меньшей мере один датчик для регистрации относительного поворота между несущим транспортным средством 10 и трубопроводом 02 или между несущим транспортным средством 10 и частями трубопровод 02, такого как, например, его консолями 21, 22, может содержать:
- по меньшей мере один датчик угла поворота, расположенный между трубопроводом 02 или частями трубопровода 02, такими как, например, его консолями 21, 22, и несущим транспортным средством 10, и/или
- по меньшей мере один регистрирующий угол между несущим транспортным средством 10 и опорной плоскостью датчик наклона и по меньшей мере один регистрирующий угол между трубопроводом 02 или частями трубопровода 02, такими как, например, его консолями 21, 22, и опорной плоскостью датчик наклона.
При этом разность между зарегистрированными датчиками наклона углом между несущим транспортным средством 10 и опорной плоскостью и углом между трубопроводом 02 или частями трубопровода 02, такими как, например, его консолями 21, 22, и опорной плоскостью пропорциональна относительному повороту между несущим транспортным средством 10 и трубопроводом 02 или же относительному повороту между несущим транспортным средством 10 и расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22.
Посредством объединения рассчитанного с помощью зарегистрированной датчиком скорости w поворота поворотного положения alpha2 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, с зарегистрированным датчиками непосредственно с помощью датчика угла поворота или опосредованно посредством образования разности наклона alpha_g трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, и наклона alpha_t несущего транспортного средства 10 относительно опорной поверхности относительным поворотом d_alpha1 между несущим транспортным средством 10 трубопроводом 02 или же между несущим транспортным средством 10 и расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, может быть взята за основу опорная плоскость, соответствующая длительной ориентации несущего транспортного средства 10 и отображающая усредненный профиль почвы.
По меньшей мере одна сенсорная структура для регистрации поворотного положения трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг поворотной оси 20 относительно опорной плоскости может содержать по меньшей мере один регистрирующий угол alpha_g между трубопроводом 02 или расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, и опорной плоскостью датчик наклона.
Посредством объединения рассчитанного с помощью скорости w поворота поворотного положения alpha2 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, с поворотным положением alpha1 трубопровода или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, зарегистрированным с помощью регистрации угла alpha между трубопроводом 02 и опорной плоскостью или между расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, и опорной плоскостью, может быть взята за основу соответствующая искусственному горизонту опорная плоскость.
Для определения текущего поворотного положения трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости посредством объединения поворотного положения трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, рассчитанного с помощью скорости поворота, с зарегистрированным датчиками непосредственно или опосредовано посредством образования разности поворотным положением трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, регулирующее устройство может:
- содержать выполняющие фильтрацию Кальмана средства, и/или
- содержать средства для низкочастотной фильтрации зарегистрированного датчиками поворотного положения, а также средства для сравнения зарегистрированного датчиками, подвергнутого низкочастотной фильтрации поворотного положения при непрерывной коррекции на нуль с рассчитанным с помощью скорости поворота поворотным положением, чтобы скомпенсировать угловой дрейф.
Регулирующее устройство с помощью по меньшей мере одного исполнительного элемента 03, содержащего, например, по меньшей мере один гидравлический цилиндр, регулирует поворотное положение трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 вдоль направления движения несущего транспортного средства 10 и/или управляет этим поворотным положением. В принципе вместо гидравлических цилиндров в любое время могут быть применены также другие подходящие исполнительные элементы 03, например пневматические, электромеханические или электродвигательные исполнительные элементы 03 или исполнительные органы.
Регулирующее устройство допускает работу в автоматическом режиме, при котором исполнительный элемент 03 выполняет активное движение, чтобы таким образом согласовать поворотное положение трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, относительно опорной плоскости.
Изобретение позволяет выполнять очень точное определение текущего поворотного положения трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, относительно опорной плоскости. По сравнению с определением поворотного положения с помощью нескольких ультразвуковых датчиков это является менее затратным и менее дорогостоящим.
По меньшей мере один трубопровод 02 может быть расположен на несущем транспортном средстве 10 долговременно или с возможностью замены на другой агрегат для сельскохозяйственной обработки почвы и/или насаждений.
При этом несущее транспортное средство 10 может быть приводимым в движение или буксируемым, так что:
- в случае приводимого в движение несущего транспортного средства 10 с долговременно расположенным трубопроводом 02 агрегатом 01 образуется самодвижущееся сельскохозяйственное орудие или же сельскохозяйственное самоходное орудие,
- в случае буксируемого несущего транспортного средства 10 с долговременно расположенным трубопроводом 02 агрегатом 01 образуется буксируемое сельскохозяйственное орудие, такое как, например, сельскохозяйственный прицеп, и
- в случае приводимого в движение несущего транспортного средства 10 с трубопроводом 02, расположенным, например, на трехточечной навесной системе или на предусмотренной для этого грузовой платформе с возможностью замены на другой агрегат для сельскохозяйственной обработки почвы и/или насаждений, агрегатом 01 образуется или навесное орудие, или сборное орудие.
Агрегат 01 позволяет реализовать способ для управления им с помощью регулирования поворотного положения расположенного на несущем транспортном средстве 10 с возможностью поворота вокруг поворотной оси 20 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, в зависимости от текущего поворотного положения.
При этом для определения текущего положения, изображенного на фиг. 7 и фиг. 8 в разных примерах выполнения, предусмотрено следующее:
- регистрируют скорость w поворота трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости,
- предпочтительно независимо от скорости w поворота регистрируют поворотное положение alpha1 или же d_alpha1 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости,
- посредством интегрирования зарегистрированной скорости w поворота по времени рассчитывают поворотное положение alpha2 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, относительно опорной плоскости, вследствие чего, с одной стороны, ни несущее транспортное средство 10 агрегата 01, ни линейные ускорения не оказывают возмущающего воздействия на расчет поворотного положения, но, с другой стороны, погрешности измерений тоже интегрируются и вызывают называемый в дальнейшем угловым дрейфом дрейф поворотного положения alpha1 или же d_alpha1, и
- для компенсации углового дрейфа рассчитанное с помощью скорости w поворота поворотное положение alpha2 трубопровода объединяют с поворотным положением alpha1 или же d_alpha1 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, зарегистрированным для определения текущего поворотного положения alpha0 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, относительно опорной плоскости.
Посредством объединения рассчитанного поворотного положения alpha2 с измеренным поворотным положением alpha1 или же d_alpha1, называемым зарегистрированным поворотным положением, текущее поворотное положение относительно опорной плоскости определяют очень точно, причем используют только преимущества соответствующего метода измерений без необходимости мириться с его недостатками.
Посредством объединения рассчитанного с помощью скорости w поворота поворотного положения alpha2 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, с зарегистрированным независимо от скорости w поворота поворотным положением alpha1 или же d_alpha1 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, в каждом случае относительно опорной плоскости, может быть сформирован управляющий сигнал, отводящий трубопровод 02 или расположенные с возможностью поворота вокруг собственных поворотных осей 20 части трубопровода 02, такие как, например, его консоли 21, 22, из его или же их текущего поворотного положения alpha0 в заданное поворотное положение относительно опорной плоскости.
Согласно изобретению скорость w поворота может быть зарегистрирована несколькими способами.
Например, скорость w поворота может быть зарегистрирована с помощью по меньшей мере одного датчика 25, 26 частоты вращения, расположенного на трубопроводе 02 или на расположенных с возможностью поворота вокруг собственных поворотных осей 20 частях трубопровода 02, таких как, например, его консолях 21, 22, и регистрирующего скорость поворота трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22.
Соответственно этому для регистрации скорости w поворота может быть применен датчик 25, 26 частоты вращения, который монтируют непосредственно на трубопроводе 02 или на расположенных с возможностью поворота вокруг собственных поворотных осей 20 частях трубопровода 02, таких как, например, его консолях 21, 22. Таким образом, поворотные движения несущего транспортного средства 10 не оказывают влияния на определение скорости w поворота трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22. Следовательно, пропорциональный измеренной величине или отображающий ее выходной сигнал датчика 25, 26 частоты вращения соответствует поворотному движению трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, относительно произвольной опорной плоскости, например относительно поверхности земли или же ортогонально ускорению свободного падения или относительно длительной ориентации транспортного средства 10, воспроизводящей усредненный профиль почвы.
Данная измеряемая величина или же пропорциональный данной измеряемой величине или отображающий ее, вливающийся в управляющие сигналы выходной сигнал по меньшей одного датчика 25, 26 частоты вращения, регистрирующего скорости поворота трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, могут быть применены для того, чтобы получить активное демпфирование трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, в виде активно вводимого момента торможения.
Альтернативно или дополнительно, скорость w поворота может быть зарегистрирована с помощью скорости поворота несущего транспортного средства 10 вокруг его проходящей параллельно поворотной оси 20 продольной оси и с помощью относительного поворота между несущим транспортным средством 10 и трубопроводом 02 или между несущим транспортным средством 10 и расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, так что тогда из обоих измеренных значений, скорости поворота несущего транспортного средства 10 относительно его продольной оси, а также относительного поворота между несущим транспортным средством 10 и трубопроводом 02 или же относительного поворота между несущим транспортным средством 10 и расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, может быть определена абсолютная скорость w поворота трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22 вокруг по меньшей мере одной поворотной оси 20.
Для того чтобы зарегистрировать скорость w поворота трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, с помощью скорости поворота несущего транспортного средства 10 вокруг его проходящей параллельно поворотной оси 20 продольной оси и с помощью относительного поворота d_alpha1 между несущим транспортным средством 10 и трубопроводом 02 или же с помощью одного или нескольких относительных поворотов d_alpha1 между несущим транспортным средством 10 и расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, может быть предусмотрено расположение на несущем транспортном средстве 10 агрегата 01 датчика частоты вращения, чтобы регистрировать скорость поворота несущего транспортного средства 10 вокруг его продольной оси, называемую также частотой поперечной качки, и выполнение датчика угла поворота или датчика угловой скорости вращения между несущим транспортным средством 10 и трубопроводом 02 или же соответственно датчика угла поворота или датчика угловой скорости вращения между несущим транспортным средством 10 и расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22.
Альтернативно или дополнительно, скорость w поворота может быть зарегистрирована посредством интегрирования углового ускорения по времени и/или посредством интегрирования определенного с помощью линейных ускорений углового ускорения по времени.
Например, для того, чтобы зарегистрировать скорость w поворота, могут быть зарегистрированы линейные ускорения в области консолей 21, 22 трубопровода 02, преимущественным образом на противоположных концах 23, 24 консолей 21, 22, и с помощью разности линейных ускорений на противоположных концах 23, 24 консолей 21, 22, зная называемую также рабочей шириной ширину трубопровода, могут быть рассчитаны сначала угловое ускорение трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, и затем посредством интегрирования по времени - опять же скорость w поворота.
Поворотное положение alpha1 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости может быть зарегистрировано с помощью угла наклона alpha между трубопроводом 02 или расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, и горизонталью или вертикалью (фиг. 8).
Относительный поворот d_alpha1 между несущим транспортным средством 10 и трубопроводом 02 или же между несущим транспортным средством и расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, может быть зарегистрирован, например, непосредственно с помощью угла кручения d_alpha1 между трубопроводом 02 и несущим транспортным средством 10 или опосредованно посредством разности между поворотным положением alpha_g трубопровода 02 вокруг поворотной оси 20 относительно опорной плоскости и поворотным положением alpha_t несущего транспортного средства 10 вокруг его проходящей параллельно поворотной оси 20 продольной оси относительно опорной плоскости. Разность зарегистрированных датчиками угла d_alpha1 между несущим транспортным средством 10 и опорной плоскостью и угла между трубопроводом и опорной плоскостью пропорциональна относительному повороту d_alpha1 между несущим транспортным средством 10 и трубопроводом 02. Данный относительный поворот d_alpha1 соответствует наклону трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, относительно опорной плоскости, образованной посредством несущего транспортного средства 10, например его длительной ориентацией. Соответственно на трубопроводе 02 и на несущем транспортном средстве 10 для регистрации поворотного положения alpha_g трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости и поворотного положения alpha_t несущего транспортного средства 10 вокруг его проходящей параллельно по меньшей мере одной поворотной оси 20 продольной оси относительно опорной плоскости могут быть предусмотрены датчики угла наклона, регистрирующие угол наклона alpha_g между трубопроводом 02 и вертикалью и/или горизонталью или же угол наклона alpha_t между несущим транспортным средством 10 и вертикалью и/или горизонталью (фиг. 7).
Для непосредственной регистрации относительного поворота d_alpha1 может быть предусмотрен датчик угла поворота между трубопроводом 02 или расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, и несущим транспортным средством 10.
Посредством объединения рассчитанного с помощью скорости w поворота поворотного положения alpha2 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, с рассчитанным и/или зарегистрированным поворотным положением d_alpha1 между несущим транспортным средством 10 и трубопроводом или расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, берут за основу соответствующую длительной ориентации несущего транспортного средства 10 и отображающую усредненный профиль почвы опорную плоскость.
Посредством объединения рассчитанного с помощью скорости w поворота поворотного положения alpha2 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, с зарегистрированным с помощью регистрации угла alpha между трубопроводом 02 или расположенными с возможностью поворота вокруг собственных поворотных осей 20 частями трубопровода 02, такими как, например, его консолями 21, 22, и опорной плоскостью поворотным положением alpha1 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, берут за основу соответствующую искусственному горизонту опорную плоскость.
Для определения текущего поворотного положения alpha0 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, вокруг по меньшей мере одной поворотной оси 20 относительно опорной плоскости посредством объединения рассчитанного с помощью скорости w поворота поворотного положения alpha2 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, с зарегистрированным непосредственно или опосредованно посредством образования разности поворотным положением alpha1 или d_alpha1 трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22, преимущественным образом, предусматривают выполнение фильтрации Кальмана и/или для компенсации углового дрейфа выполнение низкочастотной фильтрации зарегистрированного поворотного положения alpha1 или же d_alpha1, а также сравнение подвергнутого низкочастотной фильтрации, зарегистрированного поворотного положения alpha1 или же d_alpha1 при непрерывной коррекции на нуль с рассчитанным с помощью скорости w поворота поворотным положением alpha2.
При этом для регистрации скорости w поворота применяют, преимущественным образом, по меньшей мере один датчик 25, 26 частоты вращения, который монтируют непосредственно на трубопроводе 02 или же на его средней части или на расположенных с возможностью поворота вокруг собственной поворотной оси 20 частях трубопровода 02, таких как, например, его консолях 21, 22. Таким образом, поворотные движения несущего транспортного средства 10 не оказывают влияния на определение скорости w поворота трубопровода 02 или расположенных с возможностью поворота вокруг собственных поворотных осей 20 частей трубопровода 02, таких как, например, его консолей 21, 22. Следовательно, пропорциональный измеренной величине или отображающий ее выходной сигнал соответствует поворотному движению трубопровода 02 или расположенных с возможностью поворота вокруг собственной поворотной оси 20 частей трубопровода 02, таких как, например, его консолей 21, 22, относительно произвольной опорной плоскости, например относительно поверхности земли или же ортогонально ускорению свободного падения.
Важно упомянуть, что для определения скорости w поворота применяют, преимущественным образом, датчик 25, 26 частоты вращения, который смонтирован непосредственно на трубопроводе 02. Благодаря этому поворотные движения несущего транспортного средства 10 не оказывают влияния на измерение. Таким образом, измеренная им величина соответствует поворотному движению трубопровода относительно поверхности земли или же ортогонально ускорению свободного падения.
Изобретение включает в себя также датчик 25, 26 частоты вращения на несущем транспортном средстве 10 для измерения поворотных движений (возмущающих движений) несущего транспортного средства, причем посредством датчика угла, называемого также датчиком или сенсором угла поворота, или датчика угловой скорости вращения, называемого также датчиком или сенсором частоты вращения, дополнительно может быть измерен относительный поворот d_alpha1 между несущим транспортным средством 10 и образованным, преимущественным образом, в виде опрыскивающего трубопровода трубопроводом 02, причем из обоих измеренных значений может быть определена абсолютная скорость w поворота опрыскивающего трубопровода.
Соответственно этому, изобретение включает в себя также несущее транспортное средство 10 со смонтированным на нем трубопроводом 02 и датчиком 25, 26 частоты вращения.
Изобретение является применимым в промышленности, в отрасли изготовления сельскохозяйственных агрегатов для внесения жидких и/или твердых активных веществ.
Изобретение было описано со ссылкой на предпочтительную форму выполнения. Тем не менее, для специалиста является мыслимым, что могут быть выполнены модификации и изменения изобретения, которые при этом не выходят за пределы правовой охраны последующих пунктов формулы изобретения.
Реферат
Группа изобретений относится к области сельскохозяйственного машиностроения. Агрегат для внесения активных веществ включает в себя несущее транспортное средство, поворотный трубопровод, сенсорную структуру для регистрации скорости поворота и/или ускорения трубопровода вокруг оси, сенсорную структуру для регистрации поворотного положения трубопровода, регулирующее устройство и исполнительный элемент. Регулирующее устройство перерабатывает выходные сигналы сенсорных структур в управляющие сигналы. Исполнительный элемент в зависимости от управляющих сигналов влияет на поворотное положение трубопровода вокруг поворотной оси. Для определения поворотного положения трубопровода относительно начальной ориентации, регулирующее устройство посредством интегрирования скорости поворота по времени рассчитывает поворотное положение трубопровода относительно опорной плоскости. Для определения текущего поворотного положения трубопровода относительно опорной плоскости регулирующее устройство объединяет рассчитанное с помощью скорости поворота поворотное положение с зарегистрированным поворотным положением. Полученный управляющий сигнал отводит трубопровод из его текущего поворотного положения в заданное поворотное положение относительно опорной плоскости. Обеспечивается точность соблюдения расстояния консолей относительно поверхности почвы. 2 н. и 15 з.п. ф-лы, 8 ил.
Комментарии