Ультразвуковой дефектоскоп, способ ультразвуковой дефектоскопии и способ изготовления изделия - RU2682983C1
Код документа: RU2682983C1
Чертежи








Описание
Перекрёстные ссылки на родственные заявки
Настоящая заявка испрашивает приоритет по заявке на патент Японии No. 2017-073660, поданной 3 апреля 2017г., всё содержание которой включено в настоящее описание путём ссылки.
Область техники, к которой относится изобретение
Варианты осуществления настоящего изобретения относятся к ультразвуковой дефектоскопии с фазированной решёткой, а также к способу изготовления изделия с использованием ультразвуковой дефектоскопии.
Уровень техники
Ультразвуковая дефектоскопия - это технология контроля, которая неразрушающим методом может контролировать бездефектность поверхности и внутренней части конструкционного материала и т.п., который должен использоваться в качестве изделия, при этом ультразвуковая дефектоскопия используется в различных областях.
Ультразвуковая дефектоскопия с фазированной решёткой осуществляется таким образом, что датчик-решётка, состоящий из упорядоченных нескольких компактных пьезоэлектрических элементов для передачи и приёма ультразвуковых волн, непосредственно или опосредованно вводится в контакт с контролируемым объектом. Возбуждая эти несколько упорядоченных пьезоэлектрических элементов в различные моменты времени, ультразвуковые волны могут изнутри передаваться от датчика-решетки к контролируемому объекту под произвольным углом.
Поэтому метод с использованием фазированной решётки позволяет обнаруживать трещины в широком диапазоне и с множеством углов при неподвижном датчике-решётке, в отличие от метода с одиночным датчиком, в котором ультразвуковые волны могут передаваться только под заданным углом. Таким образом, метод с использованием фазированной решётки для ультразвуковой дефектоскопии возможно использовать для контроля конструкционного материала, имеющего сложную форму, для уменьшения количество рабочих этапов.
[Патентный документ 1] Публикация No. 2011-002360 не прошедшей экспертизу патентной заявки Японии.
Например, когда ультразвуковая дефектоскопия выполняется на контролируемом объекте, имеющем укрупнённое кристаллическое зерно, и/или анизотропию, таком как сварной участок, частота ультразвуковой волны, передаваемой во внутреннюю часть контролируемого объекта, иногда устанавливается на маленькую частоту, для того чтобы уменьшить влияние шума. В случае передачи низкочастотной ультразвуковой волны во внутреннюю часть контролируемого объекта с помощью способа с фазированной решёткой, требуется увеличивать размер каждого из пьезоэлектрических элементов, составляющих датчик-решётку, чтобы гарантировать чувствительность обнаружения дефектов.
В качестве одного из способов возбуждения пьезоэлектрических элементов в способе с фазированной решёткой известен способ линейного сканирования. В способе линейного сканирования положение оси ультразвукового пучка (т.е. исходное положение или положение падения на контролируемый объект) перемещается вдоль поверхности контролируемого объекта, в то время как направление обнаружения дефекта (т.е. направление ультразвукового пучка, например, угол преломления, передаваемый во внутреннюю часть контролируемого объекта) сохраняется постоянным. В случае выполнения этого способа линейного сканирования, шаг решётки пьезоэлектрических элементов становится больше, когда размер каждого из пьезоэлектрических элементов увеличивается. В результате, интервал дискретно расположенных ультразвуковых пучков, в соответствии с размером каждого из пьезоэлектрических элементов, увеличивается, и возникает проблема уменьшения пространственного разрешения обнаружения дефектов.
Когда размер каждого из пьезоэлектрических элементов уменьшается для решения упомянутой проблемы, необходимо одновременно возбуждать множество пьезоэлектрических элементов для гарантирования чувствительности обнаружения дефектов, что далее приводит к другой проблеме - каналы управления пьезоэлектрических элементов становятся огромными.
С учётом упомянутых проблем, задачей настоящего изобретения является обеспечение ультразвуковой дефектоскопии с улучшенным пространственным разрешением обнаружения дефектов и обеспечение способа изготовления изделия на основе этой ультразвуковой дефектоскопии.
Краткое описание чертежей
Фиг. 1 - блок-схема, иллюстрирующая ультразвуковой дефектоскоп, в соответствии с первым вариантом осуществления настоящего изобретения;
фиг. 2A - 2D - схемы, иллюстрирующие ультразвуковой траекторию распространения ультразвуковой волны, сигнал обнаружения, и первый комбинированный сигнал;
фиг. 3A - график формы сигнала обнаружения;
фиг. 3B и фиг. 3C - схемы, иллюстрирующие линию пучка первого комбинированного сигнала;
фиг. 4A и фиг. 4B - схемы, иллюстрирующие линию пучка второго комбинированного сигнала;
фиг. 4C - схема, иллюстрирующая внутреннее изображение контролируемого объекта;
фиг. 5A - 5F - схемы, иллюстрирующие работу ультразвукового дефектоскопа в соответствии с первым вариантом осуществления настоящего изобретения;
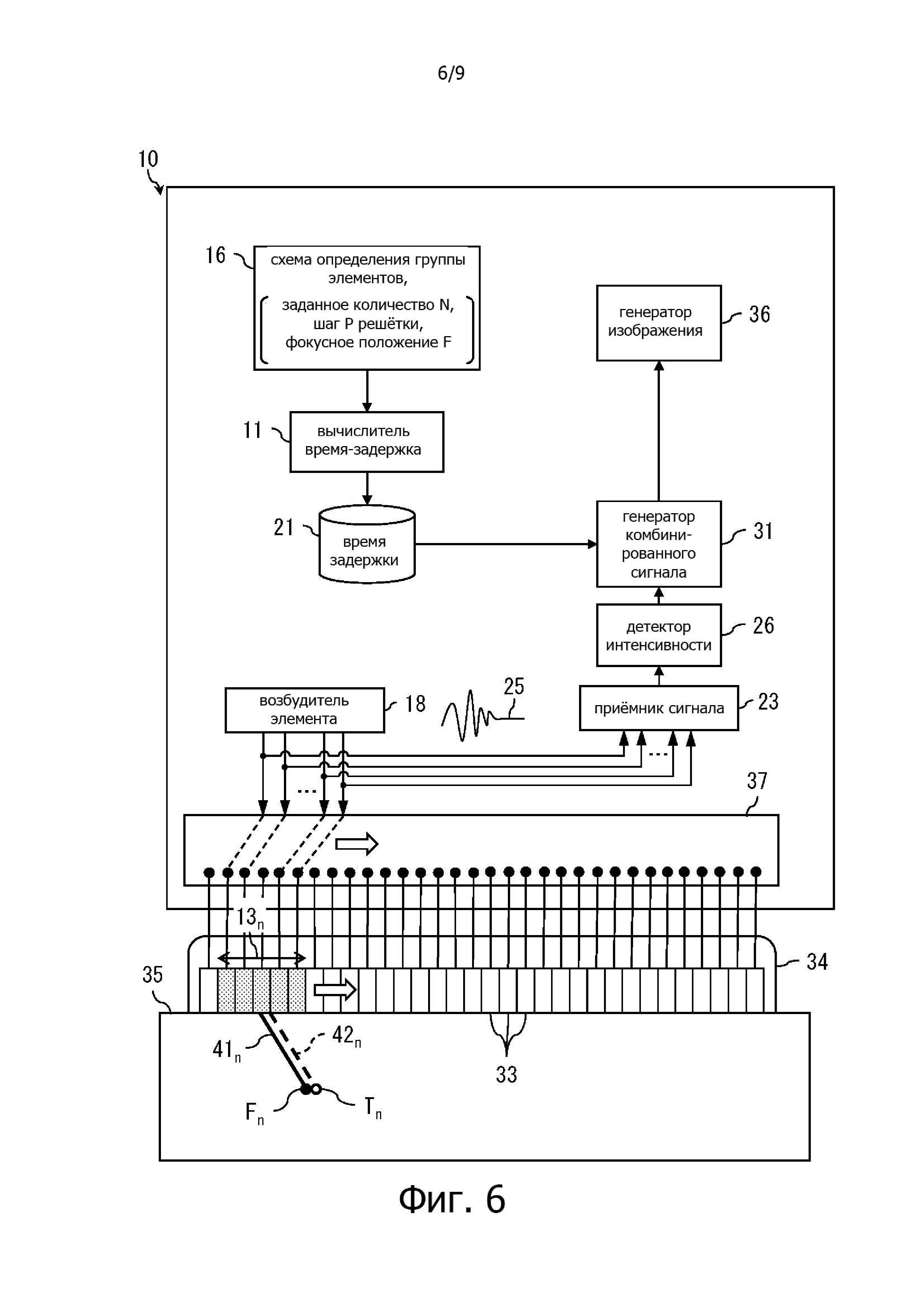
фиг. 6 - блок-схема, иллюстрирующая ультразвуковой дефектоскоп, соответствующий второму варианту осуществления настоящего изобретения;
фиг. 7 - блок-схема, иллюстрирующая ультразвуковой дефектоскоп, соответствующий третьему варианту осуществления настоящего изобретения;
фиг. 8A - 8C - схемы, иллюстрирующие линейное сканирование ультразвуковыми волнами в третьем варианте осуществления изобретения;
фиг. 9 - блок-схема, иллюстрирующая процесс обработки, выполняемый на сигнале обнаружения, в третьем варианте осуществления изобретения; и
фиг. 10 - схема последовательности операций, иллюстрирующая способ ультразвуковой дефектоскопии, соответствующий каждому варианту осуществления изобретения.
Подробное описание
В дальнейшем варианты осуществления изобретения описываются со ссылками на сопроводительные чертежи.
Описанные в дальнейшем варианты осуществления изобретения обеспечивают ультразвуковой дефектоскоп, содержащий:
датчик-решётку, содержащий множество пьезоэлектрических элементов, причём каждый из пьезоэлектрических элементов конфигурирован таким образом, чтобы передавать и принимать ультразвуковую волну на контролируемый объект и от него;
схему определения группы элементов, выполненную с возможностью:
выбирать в качестве группы элементов несколько последовательных пьезоэлектрических элементов из указанного множества пьезоэлектрических элементов;
устанавливать начальное положение указанной группы элементов на основе информации о компоновке решётки из множества пьезоэлектрических элементов в указанной группе элементов и на основе весового значения для каждого из указанного множества пьезоэлектрических элементов в указанной группе элементов, и
вычислять траекторию распространения ультразвукового пучка от указанной группы элементов на основе указанного начального положения и заданного угла преломления;
вычислитель, выполненный с возможностью вычислять время задержки для каждого из указанного множества пьезоэлектрических элементов в указанной группе элементов таким образом, чтобы ультразвуковой пучок конфигурировался для распространения вдоль указанной траектории распространения;
приёмник сигналов, выполненный с возможностью принимать в качестве сигналов обнаружения соответствующие ультразвуковые волны, принимаемые указанным множеством пьезоэлектрических элементов; и
генератор, выполненный с возможностью генерировать по меньшей мере один комбинированный сигнал для указанного ультразвукового пучка, имеющего указанную траекторию распространения, на основе указанных сигналов обнаружения и времени задержки.
Кроме того, описанные в дальнейшем варианты осуществления изобретения обеспечивают способ ультразвуковой дефектоскопии, характеризующийся тем, что:
выбирают в качестве группы элементов несколько последовательных пьезоэлектрических элементов, которые выбираются из множества пьезоэлектрических элементов, составляющих датчик-решётку;
устанавливают весовое значение для каждого из указанного множества пьезоэлектрических элементов в указанной группе элементов;
устанавливают начальное положение указанной группы элементов на основе указанного весового значения и информации о компоновке решётки из указанного множества пьезоэлектрических элементов в указанной группе элементов;
вычисляют траектории распространения ультразвукового пучка от указанной группы элементов на основе указанного начального положения и заданного угла преломления;
вычисляют времени задержки для каждого из указанного множества пьезоэлектрических элементов в указанной группе элементов таким образом, чтобы ультразвуковой пучок конфигурировался для распространения вдоль указанной траектории распространения;
принимают в качестве сигналов обнаружения соответствующие ультразвуковые волны, переданные от контролируемого объекта и принятые указанным множеством пьезоэлектрических элементов; и
генерируют по меньшей мере один комбинированный сигнал для ультразвукового пучка, имеющего указанную траекторию распространения волны, на основе указанных сигналов обнаружения и указанного времени задержки.
Кроме того, описанные в дальнейшем варианты осуществления изобретения обеспечивают способ изготовления изделия, содержащий:
подготовку базовой детали;
выполнение указанного способа ультразвуковой дефектоскопии в отношении базовой детали в качестве контролируемого объекта;
доработку базовой детали, на которой выполнялся способ ультразвуковой дефектоскопии и рассматриваемой в качестве указанного изделия.
В соответствии с вариантами осуществления изобретения, обеспечиваются способ ультразвуковой дефектоскопии с улучшенным пространственным разрешением обнаружения дефектов и способ изготовления изделия на основе этого способа ультразвуковой дефектоскопии.
Первый вариант осуществления изобретения
Как показано на фиг. 1, ультразвуковой дефектоскоп 10 в соответствии с первым вариантом осуществления изобретения, содержит датчик-решетку 34, содержащий множество пьезоэлектрических элементов 33, схему 16 определения группы элементов, вычислитель 11 времени задержки, генератор 31 комбинированного сигнала. Каждый из пьезоэлектрических элементов 33 может передавать и принимать ультразвуковые волны на контролируемый объект 35 и от него.
Как показано в нижней части фиг. 1, схема 16 определения группы элементов выбирает и определяет множество групп 131, 132,…, 13М элементов из всех пьезоэлектрических элементов 33, составляющих датчик-решетку 34, таким образом, что каждая из групп 131, 132,…, 13М элементов состоит из нескольких последовательных пьезоэлектрических элементов 33. В дальнейшем все группы 131, 132,…, 13М элементов иногда для краткости названы как группы 13 элементов, а одна из групп 131, 132,…, 13М элементов иногда для краткости названа как каждая группа 13 элементов. Кроме того, схема 16 определения группы элементов устанавливает начальные положения С (С1, С2,…, СМ) соответствующих групп 13 элементов (фиг. 3В) на основе информации о компоновке решётки пьезоэлектрических элементов 33, составляющих каждую группу 13 элементов, а также на основе весового значения каждого из пьезоэлектрических элементов 33. Кроме того, схема 16 определения группы элементов вычисляет траекторию распространения ультразвукового пучка от каждой группы 13 элементов на основе начального положения С и заданного угла преломления.
Вычислитель 11 времени задержки вычисляет время 21 задержки каждого из пьезоэлектрических элементов 33, составляющих каждую группу 13 элементов, таким образом, что ультразвуковой пучок от каждой группы 13 элементов конфигурируется для распространения вдоль заданной траектории распространения.
Приёмник 23 сигнала принимает ультразвуковые волны, принятые с помощью соответствующих пьезоэлектрических элементов 33, в качестве сигналов 25 обнаружения. Такие ультразвуковые волны, принятые с помощью соответствующих пьезоэлектрических элементов 33, передаются от контролируемого объекта 35, в частности, трещины или разрыва внутри контролируемого объекта 35 или границы контролируемого объекта 35.
Генератор 31 комбинированного сигнала формирует сигналы 25 обнаружения, соответствующие времени 21 задержки так, чтобы генерировать комбинированный сигнал ультразвукового пучка, имеющего указанную траекторию распространения. Другими словами, генератор 31 комбинированного сигнала генерирует комбинированный сигнал для ультразвукового пучка, имеющего заданную траекторию распространения, на основе сигналов 25 обнаружения и времени 21 задержки.
Каждый из пьезоэлектрических элементов 33 состоит, например, из керамики, полимерной плёнки, и композитного материала, вводов сигнал напряжения, для того чтобы создавать ультразвуковую волну вследствие пьезоэлектрического эффекта, и вводов ультразвуковой волны для того, чтобы выводить сигнал 25 обнаружения вследствие пьезоэлектрического эффекта. Помимо пьезоэлектрических элементов 33, датчик-решетка 34 содержит не показанные компоненты, такие как демпфирующий материал для демпфирования ультразвуковой волны и передняя пластина, прикреплённая к поверхности ультразвукового осциллятора.
Хотя в настоящем варианте осуществления изобретения используется датчик 34 с фазированной решеткой, в котором пьезоэлектрические элементы 33 располагаются в одномерном порядке, варианты осуществления настоящего изобретения не ограничиваются таким датчиком-решеткой. Любой датчик-решетка может применяться для вариантов осуществления настоящего изобретения, если указанные несколько пьезоэлектрических элементов располагаются с заданным шагом.
В частности, описываемые далее датчики-решетки приводятся в качестве примеров датчиков, которые могут использоваться в вариантах осуществления настоящего изобретения. Возможно использовать датчики-решетки с размерностью 1,5, полученные разделением пьезоэлектрических элементов 33 с неоднородным размером по глубине датчика с линейной решёткой, матричный датчик-решётка, в котором пьезоэлектрические элементы 33 располагаются в виде двухмерной структуры, датчик с кольцевой решёткой, в котором концентрически располагаются кольцеобразные пьезоэлектрические элементы 33, датчик с решёткой в виде разрезного кольца, полученный с помощью разделения пьезоэлектрических элементов 33 кольцевого датчика в круговом направлении, датчик с неравномерной компоновкой, в котором пьезоэлектрические элементы 33 располагаются неравномерно, дугообразный датчик, в котором пьезоэлектрические элементы 33 располагаются в круговом направленном положении дуги, и сферический датчик, в котором пьезоэлектрические элементы 33 располагаются на сферической поверхности.
Кроме того, настоящий вариант осуществления изобретения может применяться для обнаружения двойных трещин, использующего любую комбинацию из этих датчиков- решеток, независимо от типов этих датчиков-решеток. Кроме того, описанные датчики-решетки включают в себя датчики, которые могут использоваться при спекании или уплотнении, независимо от того, находятся ли они под водой или на воздухе.
Хотя описание компоновки датчика 34 с решеткой в настоящем варианте осуществления изобретения опускается, как для установки датчика-решетки 34 на контролируемый объект 35, может быть выбрано положение, при котором ультразвуковые волны могут падать под острым углом с помощью промежуточного клина. Для этого клина используется изотропный материал, который может передавать ультразвуковые волны и имеет известное акустическое сопротивление. В частности, для этого клина возможно использование акрилового полимера, полиамида, желатина, других полимеров, материала, имеющего акустическое сопротивление, близкое или равное сопротивлению передней пластины, а также материала, имеющего акустическое сопротивление, близкое или равное сопротивлению контролируемого объекта 35. Кроме того, для этого клина возможно использование композитного материала, который ступенчато или постепенно изменяет акустическое сопротивление, а также возможно использование других подходящих материалов.
Для предотвращения влияния множественных отражённых волн внутри клина на результат обнаружения дефектов, в некоторых случаях демпфирующий материал располагается внутри или снаружи указанного клина, и тогда обеспечивается волна в виде горы с возвышающейся формой, и/или обеспечивается механизм уменьшения множественного отражения.
При установке датчика-решетки 34 на контролируемом объекте 35, с целью уменьшения контактного импеданса, иногда между компонентами размещается акустическая связывающая среда 38 (фиг. 3А-3С).
Хотя в качестве акустической связывающей среды 38 приводятся такие вещества, как например, вода, глицерин, машинное масло, касторовое масло, акриловый полимер, полистирол, и желатин, акустическая связывающая среда 38 этим не ограничивается. В качестве акустической связывающей среды 38 возможно использование любого подходящего материала, который может передавать ультразвуковые волны, подавляя затухание.
Возбудитель 18 элемента подает сигнал напряжения, имеющий произвольную волновую форму, к каждому из пьезоэлектрических элементов 33, составляющих датчик-решетку 34, и вызывает функционирование этих пьезоэлектрических элементов 33 и вывод ультразвуковых волн этими элементами 33. Волновая форма этого сигнала напряжения может быть, например, синусоидальной, пилообразной, прямоугольной, с острыми импульсами, биполярной волной, имеющей значения как положительного полюса, так и отрицательного полюса, или однополярной волной, имеющей положительное колебание или отрицательное колебание. Кроме того, к положительному или отрицательному значению может быть добавлено смещение. Помимо этого, волновая форма может быть увеличенной или уменьшенной при приложении или повторении определённого количества волн, аналогично единственному импульсу, взрывным волнам или непрерывной волне.
В первом варианте осуществления изобретения порядок, в котором возбудитель 18 элемента приводит в действие каждый из пьезоэлектрических элементов 33, является случайным, независимо от решётки, и не ограничивается специфическим порядком. Время задержки возбуждения пьезоэлектрических элементов 33 также является произвольным до тех пор, пока каждый сигнал 25 обнаружения не вызывает помеху, при которой появляется негативное влияние на определение дефекта в изображении.
Схема 16 определения группы элементов сохраняет информацию, в которой заданное количество N множества последовательных пьезоэлектрических элементов, которые должны выбираться из всего множества пьезоэлектрических элементов 33, составляющих датчик-решетку 34, определяется как каждая из групп 13 (131, 132,…, 13М) элементов. Кроме того, схема 16 определения группы элементов сохраняет информацию об угле преломления и фокусном расстоянии. Вместо информации об угле преломления и фокусном расстоянии схема 16 определения группы элементов может сохранять информацию, которая определяет фокусные положения F (F1, F2,…, FМ) соответствующих групп 13 (131, 132,…, 13М) элементов.
Кроме того, схема 16 определения группы элементов сохраняет информацию, которая определяет начальные положения С (С1, С2,…, СМ), которые согласуются с соответствующими группами 13 элементов, как показано на фиг. 3В. Каждое начальное положение С также в целом называется центром группы элементов. Хотя каждое начальное положение С в описании каждого варианта осуществления изобретения устанавливается в положении средней точки координат каждой группы 13 элементов, каждое начальное положение С не ограничивается средней точкой координат. В частности, в настоящем варианте осуществления изобретения каждое начальное положение С определяется на основе ширины раскрытия (весового значения) каждого из пьезоэлектрических элементов 33 в добавление к определению на основе положения каждой группы 13 элементов и информации о компоновке (информация о компоновке решётки) пьезоэлектрических элементов 33, составляющих группы 13 (131, 132,…, 13М) элементов. Информация о компоновке решётки является информацией, определяющей расположение пьезоэлектрических элементов 33 в группе 13 (131, 132,…, 13М) элементов, и/или позиционное соотношение между такими пьезоэлектрическими элементами 33. Пример информации о компоновке решётки включает в себя, но не ограничиваясь этим, шаг Р решётки пьезоэлектрических элементов 33, и/или порядок таких пьезоэлектрических элементов 33. Другими словами, схема 16 определения группы элементов конфигурируется таким образом, что информация о компоновке (информация о компоновке решётки) каждого из пьезоэлектрических элементов 33, составляющих группы 13 (131, 132,…, 13М) элементов, и коэффициенты, относящиеся к ширине раскрытия (т.е. коэффициенты соответствуют весовым значениям) каждого из пьезоэлектрических элементов 33 могут быть введены в схему 16 определения группы элементов. Указанная ширина раскрытия каждого из пьезоэлектрических элементов 33 обозначает долю (т.е. весовое значение) ультразвуковых сигналов, передаваемых или принимаемых каждым из пьезоэлектрических элементов 33, и может быть соответствующим образом установлена с помощью регулирования передающего выхода каждого из пьезоэлектрических элементов 33 или с помощью регулирования коэффициента усиления сигнала, принимаемого каждым из пьезоэлектрических элементов 33.
Когда начальные положения С (С1, С2,…, СМ), соответствующие группам 13 (131, 132,…, 13М) элементов, определяются на основе информации о расположении (информации о компоновке решётки) пьезоэлектрических элементов 33 и весового значения каждого из пьезоэлектрических элементов 33, фокусные положения F (F1, F2,…, FМ), соответствующие группам 13 (131, 132,…, 13М) элементов, определяются на основе соответствующих начальных положений С (С1, С2,…, СМ), заданных углов преломления (например, угол падения и угол преломления) и заданного фокусного расстояния.
Схема 16 определения группы элементов вычисляет траекторию 14 распространения ультразвуковой волны, проходящей через каждое фокусное положение F внутри контролируемого объекта 35 на основе комбинации одного или двух пьезоэлектрических элементов, которые выбираются из пьезоэлектрических элементов 33, расположенных в каждой группе 13 элементов, для того чтобы передавать/принимать ультразвуковую волну. Вычисление траектории 14 распространения выполняется на основе таких условий, как форма поверхности, а также плотность контролируемого объекта 35 и акустической связывающей среды 38.
Как показано на фиг. 2А, когда один из N пьезоэлектрических элементов 33, составляющих одну группу 13 элементов (например, элемент с обозначением 1 в случае фиг. 2А) устанавливается как передающий элемент, и все пьезоэлектрические элементы группы, включая этот передающий элемент, устанавливаются как принимающие элементы, может быть установлено N различных траекторий 14 распространения. В этом случае, когда все пьезоэлектрические элементы устанавливаются как расположенные последовательно передающие элементы, NxN траекторий 14 распространения устанавливаются для этой группы 13 элементов.
Вычислитель 11 времени задержки вычисляет время 21 задержки ультразвуковой волны в соответствующих комбинациях пьезоэлектрических элементов 33 на основе соответствующих траекторий 14 распространения. Диапазон каждой траектории 14 распространения соответствует времени прибытия каждой ультразвуковой волны. Когда контрольная траектория распространения устанавливается на траекторию распространения, в которой пьезоэлектрический элемент 33, который устанавливается с начальным положением С, комбинируется как передающий элемент и приёмный элемент, различие между этой контрольной траекторией распространения и каждой из других траекторий 14 распространения становится равной каждому времени 21 задержки. Эта контрольная траектория распространения не ограничивается комбинированием одного и того же пьезоэлектрического элемента 33 с передающими и принимающими элементами. Контрольная траектория распространения может быть выбрана на основе траектории распространения, которая является комбинацией одного или двух пьезоэлектрических элементов 33 в произвольных положениях.
Каждое время 21 задержки ультразвуковой волны, вычисленное вычислителем 11 времени задержки, сохраняется в запоминающем устройстве в ассоциации с соответствующей комбинацией пьезоэлектрических элементов 33.
Составная волна составляется в соответствии с временем 21 задержки, вычисленным вычислителем 11 времени задержки, на основе ультразвуковых волн, которые передаются и принимаются соответствующими пьезоэлектрическими элементами 33, составляющими группы 13 (131, 132,…, 13М) элементов. Эта составная волна называется ультразвуковым пучком с заданным углом преломления от группы 13 (131, 132,…, 13М) элементов с соответствующими начальными положениями С (С1, С2,…, СМ). Ультразвуковой пучок от группы 13 (131, 132,…, 13М) элементов является составной волной, имеющей направленность, которая получается путем комбинирования ультразвуковых волн, распространяемых таким образом, чтобы распространяться от каждого из пьезоэлектрических элементов 33. В настоящем варианте осуществления изобретения траектория распространения ультразвукового пучка определяется как траектория от каждого из начальных положений С (С1, С2,…, СМ), имеющих заданные углы преломления (такие как угол падения и угол отражения), и эта траектория распространения достигает фокусной точки F. Траектория распространения ультразвукового пучка может определяться на основе начальных положений С (С1, С2,…, СМ) и фокусных точек F (F1, F2,…, FМ), оба этих параметра соответствуют группе 13 (131, 132,…, 13М) элементов.
Как указано выше, ультразвуковой дефектоскоп 10 предварительно определяет установочное правило начального положения для определения начальных положений С, относящихся к группам 13 (131, 132,…, 13М) элементов, и установочное правило распространения ультразвукового пучка, относящееся к определению траектории распространения ультразвукового пучка, как составной волны. Кроме того, начальные положения С (С1, С2,…, СМ) соответствующих групп 13 (131, 132,…, 13М) элементов и траектория распространения ультразвукового пучка от групп 13 (131, 132,…, 13М) элементов определяются на основе установочного правила начального положения и установочного правила распространения ультразвукового пучка. Таким образом, возможно рассматривать ультразвуковой пучок, который является составной волной из ультразвуковых волн от множества пьезоэлектрических элементов 33, составляющих соответствующие группы 13 (131, 132,…, 13М) элементов, как волна с одной траекторией распространения, имеющей соответствующие направленности ультразвуковых волн.
Приёмник 23 сигнала принимает сигналы 25 обнаружения (фиг. 3А), полученные с помощью преобразования ультразвуковых волн, которые попадают на соответствующие пьезоэлектрические элементы 33, в сигналы напряжения вследствие пьезоэлектрического эффекта. Ультразвуковые волны, падающие на акустическую связывающую среду 38 и контролируемый объект 35 от пьезоэлектрических элементов 33, в значительной степени сначала отражаются и рассеиваются на поверхности контролируемого объекта 35, а затем отражаются и рассеиваются трещинами (дефектами), такими как открывающиеся на поверхности контролируемого объекта 35 трещины, а также такие, которые находятся внутри контролируемого объекта 35. Ультразвуковые волны, отражённые и рассеянные таким образом, попадают на каждый из пьезоэлектрических элементов 33, расположенных в матричном датчике-решетке 34, и каждый из сигналов 25 обнаружения, которые выводятся из соответствующих пьезоэлектрических элементов 33, индивидуально принимается в соответствующем канале приёмника 23 сигналов.
Детектор 26 интенсивности преобразует колебательные сигналы напряжения принятых сигналов 25 обнаружения в цифровые данные с помощью аналого-цифрового преобразования (A/D). Детектор 26 интенсивности может иметь функцию умножения сигналов 25 обнаружения и функцию фильтрования для того, чтобы выделять только компонент заданной частоты. Сигналы 25 обнаружения, преобразованные в цифровые данные, сохраняются в не проиллюстрированном на фигуре запоминающем устройстве (т.е. память) путем ассоциирования информации о принимающем канале пьезоэлектрических элементов 33 с каждым временем приёма.
Правая сторона каждой из фиг. 2А, 2В и 2С показывает временную диаграмму U (a, b) выходных сигналов 25 обнаружения, когда один или два определённых пьезоэлектрических элемента 33 используются как передающий элемент и приёмный элемент. В этой временной диаграмме U (a, b) символ «а» обозначает идентификационный номер передающего элемента, а символ «b» обозначает идентификационный номер приёмного элемента.
Генератор 31 комбинированного сигнала компонует ультразвуковые волны, принятые соответствующими пьезоэлектрическими элементами 33, составляющими группы 13 (131, 132,…, 13М) элементов, в соответствии с временем 21 задержки, вычисленным вычислителем 11 времени задержки. Другими словами, генератор 31 комбинированного сигнала смещает каждый из сигналов 25 обнаружения, относящихся к ультразвуковым волнам, выходящим из соответствующих пьезоэлектрических элементов 33 в направлении временной оси, с помощью временной задержки 21, сохраняемой во взаимосвязи с соответствующей комбинацией пьезоэлектрических элементов 33. Кроме того, генератор 31 комбинированного сигнала компонует группу сигналов 25 обнаружения, подвергаемых описанной выше процедуре задержки, с помощью обработки каждой группы 13 элементов как модуля, так чтобы генерировать первый комбинированный сигнал 41 (фиг. 2D). Другими словами, первый комбинированный сигнал 41 является составной волной, относящейся к ультразвуковому пучку, имеющему траекторию распространения, которая определяется на основе заданного угла преломления, из группы 13 (131, 132,…, 13М) элементов соответствующих начальных положений С (С1, С2,…, СМ), кроме того, первый комбинированный сигнал 41 является составной волной, полученной на основе сигналов 25 обнаружения и соответствующих значений временной задержки 21, т.е. с помощью компоновки сигналов 25 обнаружения, соответствующих соответствующим временным задержкам 21. В дополнение к случаю, где используется описанный выше способ, также могут использоваться другие способы для компоновки сигналов 25 обнаружения в модулях групп 13 (131, 132,…, 13М) элементов.
В настоящем варианте осуществления изобретения весовое значение (т.е. ширина раскрытия) устанавливается для каждого из пьезоэлектрических элементов 33, составляющих каждую группу 13 элементов. Как указано выше, это весовое значение (т.е. ширина раскрытия) может отражаться посредством регулирования выхода ультразвуковой волны, передаваемой от каждого из пьезоэлектрических элементов 33. Помимо этого, весовое значение (т.е. ширина раскрытия) может отражаться посредством регулирования коэффициента усиления сигнала, принимаемого каждым из пьезоэлектрических элементов 33, без изменения выходов соответствующих передаваемых ультразвуковых волн от пьезоэлектрических элементов 33 для каждого из пьезоэлектрических элементов 33.
Когда производится регулирование весового значения (ширины раскрытия) каждого из пьезоэлектрических элементов 33 посредством регулирования коэффициента усиления сигнала, принимаемого каждым из пьезоэлектрических элементов 33, генератор 31 комбинированного сигнала выполняет регулирование коэффициента усиления сигнала, что является эквивалентным определению весового значения или ширины раскрытия в отношении сигналов 25 обнаружения ультразвуковых волн, принимаемых соответствующими пьезоэлектрическими элементами 33, а затем генерирует первый комбинированный сигнал 41 с помощью компоновки сигналов 25 обнаружения, коэффициенты усиления которых были отрегулированы согласно соответствующим значениям времени задержки 21.
Когда выполняется определение весового значения (ширины раскрытия) каждого из пьезоэлектрических элементов 33 посредством регулирования выходов ультразвуковых волн, передаваемых от соответствующих пьезоэлектрических элементов 33, генератор 31 комбинированного сигнала может формировать сигналы 25 обнаружения, относящиеся к ультразвуковым волнам, принятым соответствующими пьезоэлектрическими элементами 33 в соответствии со значениями времени задержки 21, без регулирования коэффициентов усиления.
Линия, соединяющая начальное положение С и фокусное положение F, показанные на фиг. 3В, обозначает линию пучка (т.е. траекторию распространения) ультразвукового пучка, соответствующего первому комбинированному сигналу 41, который попадает на контролируемый объект 35 из группы 13 элементов и отражается на той же самой траектории. Как фиг. 3В, так и фиг. 3С иллюстрируют случай, где количество (т.е. заданное количество N) пьезоэлектрических элементов 33, составляющих каждую группу 13 элементов, равно 5, а весовое значение (ширина раскрытия) каждого из пьезоэлектрических элементов 33 составляет 100%.
Каждое начальное положение С, определяемое на основе информации о компоновке (информации о компоновке решётки) пьезоэлектрических элементов 33 и весовом значении каждого из пьезоэлектрических элементов 33, соответствует положению падения ультразвукового пучка на акустическую связывающую среду 38. В случае, показанном на фиг. 3В, координаты начального положения С определяются с помощью установочного правила распространения ультразвукового пучка, в котором взвешенное усреднение выполняется на координатах центральных положений соответствующих пьезоэлектрических элементов 33, посредством умножения на соответствующие весовые значения (в этом случае все весовые значения составляют 100%).
Ультразвуковой пучок, падающий на акустическую связывающую среду 38 в начальном положении С под углом α падения, преломляется на границе раздела с контролируемым объектом 35 и падает на контролируемый объект 35 с углом β преломления. Каждый из этих углов, т.е. угол α падения и угол β преломления, определяется углом линии ультразвукового пучка, соответствующего первому комбинированному сигналу 41, по отношению к направлению, перпендикулярному к поверхности акустической связывающей среды 38 и контролируемого объекта 35. В дальнейшем направление линии ультразвукового пучка, которое определяется на основе угла α падения в начальном положении С и угла β преломления внутри контролируемого объекта 35, совместно называется углом преломления.
Фиг. 3С иллюстрирует линию пучка (т.е. траекторию распространения) ультразвукового пучка, соответствующего первым комбинированным сигналам 41 (411, 412,…, 41М), которые генерируются в соответствующей группе 13 (131, 132,…, 13М) элементов, определяемой с помощью смещения пьезоэлектрических элементов 33, составляющих группу 13 (131, 132,…, 13М) элементов на один шаг и сохранения взвешенного значения неизменным, например, на уровне 100%.
Другими словами, каждый первый комбинированный сигнал 41 (411, 412,…, 41М) имеет одинаковый угол α падения и одинаковый угол β преломления. Таким образом, линии ультразвуковых пучков, соответствующие этим первым комбинированным сигналам 41 (411, 412,…, 41М), являются параллельными между собой, имеют одинаковый угол преломления, и дискретно располагаются таким образом, что начальное положение С, как центр группы элементов, смещается на один шаг (т.е. на расстояние Р) решётки пьезоэлектрических элементов 33 каждый раз, когда пьезоэлектрические элементы 33, составляющие группу 13 (131, 132,…, 13М) элементов, смещаются на один шаг. Заданное количество N, которое является количеством пьезоэлектрических элементов 33, составляющих каждую группу 13 (131, 132,…, 13М) элементов, равное 5, аналогично случаю, показанному на фиг. 3В, при этом пьезоэлектрические элементы 33 равны друг другу по весовому значению, как описывалось выше. Таким образом, общая величина весовых значений соответствующих пьезоэлектрических элементов 33, составляющих одну группу 13 (131, 132,…, 13М) элементов, является постоянной и общей для всех групп 13 (131, 132,…, 13М) элементов.
Далее будет приводиться описание со ссылками на фиг. 4А-4С второго комбинированного сигнала 42, полученного посредством установки линии пучка (траектории распространения) ультразвукового пучка между двумя первыми комбинированными сигналами 41n и 41n+1, которые смещены на один шаг (т.е. на расстояние Р) решётки пьезоэлектрических элементов 33.
Как показано на фиг. 4А, два первых комбинированных сигнала 41n и 41n+1 являются комбинированными сигналами для ультразвуковых пучков, соответственно из групп 13n и 13n+1 элементов. Кроме того, начальные положения Сn и Сn+1 соответствующих групп 13n и 13n+1 элементов устанавливаются таким образом, что (а) количество (т.е. заданное количество N) пьезоэлектрических элементов 33, составляющих каждую из групп 13n и 13n+1 элементов, устанавливается на первое заданное количество, равное 5, и (b) весовое значение (ширина раскрытия) каждого из пьезоэлектрических элементов 33 из групп 13n и 13n+1 элементов устанавливается на 100%, аналогично случаю на фиг. 3В. Траектории распространения первых комбинированных сигналов 41n и 41n+1 устанавливаются на основе начальных положений Сn и Сn+1 соответствующих групп 13n и 13n+1 элементов и заданных углов преломления, таких как угол α падения и угол β преломления.
В этом случае пьезоэлектрические элементы 33, составляющие группу 13n элементов или группу 13n+1 элементов, устанавливаются как группа 13n+0.5 элементов. Количество (т.е. заданное количество N) пьезоэлектрических элементов 33, составляющих группу 13n+0.5 элементов, устанавливается на значение 6, что является вторым заданным количеством, которое на 1 больше, чем первое заданное количество 5. Кроме того, например, весовые значения двух соответствующих пьезоэлектрических элементов 33 на обоих концах шести пьезоэлектрических элементов 33, составляющих группу 13n+0.5 элементов, устанавливаются на 50%, а весовые значения других четырёх пьезоэлектрических элементов 33, составляющих группу 13n+0.5 элементов, устанавливаются на 100%. Начальное положение Сn+0,5 группы 13n+0.5 элементов устанавливается на промежуточное положение между начальными положениями Сn и Сn+1 групп 13n и 13n+1 элементов с помощью установки заданного количества N на второе заданное количество, которое больше, чем первое заданное количество, а также изменения весового значения каждого из пьезоэлектрических элементов 33, составляющих группу 13n+0.5 элементов с того же самого значения, при этом заданное количество N является количеством пьезоэлектрических элементов 33, составляющих группу 13n+0.5 элементов.
Когда определяется начальное положение Сn+0,5 группы 13n+0.5 элементов, определяется также фокусное положение Fn+0,5 на основе заданного фокусного расстояния и заданных углов преломления, таких как угол α падения и угол β преломления. Здесь угол преломления ультразвукового пучка от каждой из групп 13n и 13n+1 элементов равен углу преломления ультразвукового пучка от группы 13n+0.5 элементов. Таким образом, фокусное положение Fn+0,5 устанавливается на виртуальное положение, полученное посредством перемещения фокусного положения F в направлении решётки на более короткое расстояние, чем расстояние Р, которое соответствует одному шагу решётки пьезоэлектрических элементов 33.
В настоящем варианте осуществления изобретения фокусное положение Fn+0,5 устанавливается в центральном положении, отделённом на расстояние Р/2 от каждого из фокусных положений Fn и Fn+1 ультразвуковых пучков от групп 13n и 13n+1 элементов. Однако это является только одним аспектом, и также возможно устанавливать расстояние Р одного шага для дополнительного точно отрегулированного положения посредством соответствующим образом установленного заданного количества N групп 13n+0.5 элементов и весового значения каждого из пьезоэлектрических элементов 33, составляющих группу 13n+0,5 элементов.
В этой связи начальное положение Сn+0,5 может быть установлено в положение между начальными положениями Сn и Сn+1 соответствующих групп 13n и 13n+1 элементов посредством регулирования только весового значения каждого из пьезоэлектрических элементов 33 без изменения заданного количества N групп 13n+0.5 элементов от первого заданного количества групп. Что касается общей величины весовых значений соответствующих пьезоэлектрических элементов 33 групп 13n и 13n+1 элементов и общей величины (или средней величины) весовых значений соответствующих пьезоэлектрических элементов 33, составляющих группу 13n+0,5 элементов, то обе общие величины предпочтительно равны друг другу, независимо от заданного количества N каждой из групп 13n, 13n+0.5 и 13n+1 элементов.
Однако нет необходимости строго выравнивать общую величину или среднюю величину весовых значений соответствующих пьезоэлектрических элементов 33 для каждой из групп 13n , 13n+0.5 и 13n+1 элементов, поскольку достаточно установить общую величину и/или среднюю величину весовых значений независимо от групп 13n, 13n+0.5 и 13n+1 элементов внутри заданного диапазона, который не оказывает воздействия на результат обнаружения дефектов. Например, весовое значение шести пьезоэлектрических элементов 33, составляющих группу 13n+0,5 элементов, может быть установлено таким образом, что весовое значение пьезоэлектрического элемента 33 на одном конце составляет 40% или 60%, весовое значение пьезоэлектрического элемента 33 на другом конце составляет 50%, а весовое значение других четырёх элементов составляет 100%.
Хотя допустимое отклонение общей или средней величины весовых значений пьезоэлектрических элементов 33 для каждой из групп 13n, 13n+0.5 и 13n+1 элементов зависит от таких факторов, как материал и структура контролируемого объекта 35, и/или минимальный размер дефекта, который должен быть обнаружен, часто разрешается около ± 50% средней величины, и в общем, если средняя величина попадает в пределы ± 50%, то это рассматривается как достаточное значение.
Когда фокусное положение Fn+0,5 группы 13n+0,5 элементов определяется условием, что устанавливается начальное положение Сn+0,5, вычисляются траектории 14 распространения ультразвуковых волн от соответствующих пьезоэлектрических элементов 33, составляющих группу 13n+0,5 элементов, которые проходят через определённое фокусное положение F.
Вычисление траекторий 14 распространения ультразвуковых волн выполняется для каждого из пьезоэлектрических элементов 33, составляющих группу 13n+0,5 элементов, аналогично процессам, описанным со ссылками на фиг. 2А-2D, таким способом, что каждая траектория 14 распространения вычисляется как траектория 14 распространения ультразвуковой волны, проходящей через фокусное положение Fn+0,5, на основе комбинирования одного или двух пьезоэлектрических элементов 33, впускающих/выпускающих ультразвуковую волну, которая должна быть выбрана из пьезоэлектрических элементов 33, расположенных в группе 13n+0,5 элементов. Вычисление каждой из траекторий 14 распространения выполняется на основе таких условий, как форма поверхности и плотность контролируемого объекта 35 и акустической связывающей среды 38.
Вычислитель 11 времени задержки вычисляет соответствующие значения времени 21 задержки ультразвуковых волн в комбинациях пьезоэлектрических элементов 33, которые аналогичным образом составляют группу 13n+0,5 элементов, на основе траектории 14 распространения каждой ультразвуковой волны. Каждое из значений времени 21 задержки ультразвуковых волн, вычисленное с помощью вычислительного устройства 11 для вычисления времени задержки, аналогичным образом сохраняется в запоминающем устройстве во взаимосвязи с соответствующей комбинацией пьезоэлектрических элементов 33 группы 13n+0,5 элементов.
Генератор 31 комбинированного сигнала аналогичным образом составляет ультразвуковые волны, принимаемые с помощью соответствующих пьезоэлектрических элементов 33, составляющих группу 13n+0,5 элементов, в соответствии со значениями времени 21 задержки, вычисленными вычислителем 11 времени задержки. Другими словами, генератор 31 комбинированного сигнала смещает сигнал 25 обнаружения, принятый в каждом из каналов приёмника 23 сигналов в направлении оси времени, с учётом времени 21 задержки, сохраняемом в ассоциации с соответствующей комбинацией пьезоэлектрических элементов 33. Кроме того, генератор 31 комбинированного сигнала аналогичным образом составляет группу сигналов 25 обнаружения, подвергаемых обработке по задержке времени в блоках группы 13 элементов, для того чтобы генерировать второй комбинированный сигнал 42 (фиг. 4А). Другими словами, второй комбинированный сигнал 42 является составной волной, относящейся к ультразвуковому пучку, имеющему траекторию распространения с заданным углом преломления от группы 13n+0,5 элементов в начальном положении Сn+0,5, которое должно быть получено на основе сигналов 25 обнаружения и соответствующих значений времени 21 задержки, т.е. с помощью комбинирования сигналов 25 обнаружения, в соответствии со значениями времени 21 задержки.
Как разъяснялось выше, в настоящем варианте осуществления изобретения генератор 31 комбинированного сигнала генерирует первый комбинированный сигнал 41 и второй комбинированный сигнал 42. Первый комбинированный сигнал 41 генерируется в том случае, когда установлено первое заданное количество пьезоэлектрических элементов 33 в группе 13n элементов, а второй комбинированный сигнал 42 генерируется в том случае, когда установлено второе заданное количество пьезоэлектрических элементов 33 в группе 13n+0,5 элементов, причем второе число больше первого.
Фиг. 4В иллюстрирует линии пучков, соответствующие первым комбинированным сигналам 41 (411, 412,…, 41М) (показаны сплошными линиями), которые генерируются для соответствующих ультразвуковых пучков из множества групп 13n , 13n+1 , … элементов, полученных с помощью смещения пьезоэлектрических элементов 33, составляющих группы 13n , 13n+1 , … элементов, на один шаг. Фиг. 4В также иллюстрирует линии пучков, соответствующие вторым комбинированным сигналам 42 (421, 422,…, 42М) (показаны пунктирными линиями), которые генерируются для соответствующих ультразвуковых пучков из группы 13n+0,5 элементов, полученных путем смещения пьезоэлектрических элементов 33, составляющих группу 13n+0,5 элементов, на один шаг.
Фиг. 5А и фиг. 5Е иллюстрируют группы 13n и 13n+1 элементов, которые составлены из заданного количества N=4 и смещены друг от друга на один шаг. В этом случае ширина раскрытия (весовое значение) каждого из пьезоэлектрических элементов 33, который должен приводиться в действие, устанавливается на 100%. Поскольку в этом случае размер вклада составляет 100%, из соответствующих сигналов 25 обнаружения генерируется первый комбинированный сигнал 41, преобразованный генератором 31 комбинированного сигнала. В это время линия пучка первого комбинированного сигнала 41 устанавливается таким образом, чтобы проникать в каждое из определённых фокусных положений Fn и Fn+1, как описывалось выше.
На фиг. 5В и фиг. 5F ширина раскрытия (весовое значение) пьезоэлектрического элемента 33, который позиционируется на одном конце группы 13 элементов, устанавливается на 75%, а ширина раскрытия (весовое значение) пьезоэлектрического элемента 33, который позиционируется на другом конце, устанавливается на 25%. Предпочтительно устанавливать значения ширины раскрытия (весовые значения) пьезоэлектрических элементов 33, позиционируемых на обоих концах (соответствующей группы 13 элементов), таким образом, что общая величина значений ширины раскрытия (весовых значений) всех пьезоэлектрических элементов 33 в каждой из групп 13 элементов, которые должны возбуждаться, по существу становится постоянной величиной. Это нужно для установления уровня чувствительности обнаружения дефектов с помощью всех линий пучка первых комбинированных сигналов 41 и вторых комбинированных сигналов 42, определяемых для контролируемого объекта.
В этом случае генератор 31 комбинированного сигнала обрабатывает каждый из сигналов 25 обнаружения, соответствующий комбинации пьезоэлектрических элементов 33, имеющих ширину раскрытия (весовое значение) в 100% посредством использования соотношения вклада в 100%, и даёт такой весовой коэффициент (весовое значение) для каждого сигнала 25 обнаружения, соответствующего комбинации других пьезоэлектрических элементов, так что соотношение вклада становится значением, полученным с помощью интегрирования двух значений ширины раскрытия (весовых значений). Таким образом генератор 31 комбинированного сигнала генерирует второй комбинированный сигнал 42.
В этом случае линия пучка второго комбинированного сигнала 42 устанавливается таким образом, чтобы проникать в положение, смещённое на Р/4 от определённого фокусного положения Fn или Fn+1, в направлении решётки.
Фиг. 5С и фиг. 5D иллюстрируют случай, в котором значения ширины раскрытия (весовые значения) пьезоэлектрических элементов 33, позиционируемых на обоих концах, дополнительно увеличиваются или уменьшаются на Р/4, в то время как общая величина значений ширины раскрытия (весовых значений) всех пьезоэлектрических элементов 33, которые должны возбуждаться, сохраняется на постоянном уровне. В каждом случае сигналы 25 обнаружения обрабатываются на основе ширины раскрытия (весового значения) каждого из пьезоэлектрических элементов 33, соответствующий весовой коэффициент (весовое значение) которых сохраняется в запоминающем устройстве, и таким образом генерируется второй комбинированный сигнал 42. Линия пучка второго комбинированного сигнала 42 устанавливается таким образом, чтобы проникать в положение, смещённое на Р/2 или 3Р/4 в направлении решётки от определённого фокусного положения Fn.
Хотя описание было приведено для случаев, где значения ширины раскрытия (весовые значения) пьезоэлектрических элементов 33, позиционируемых на обоих концах, смещаются на Р/4, величина смещения не ограничивается этой специфической величиной. Соответственно, внутреннее изображение контролируемого объекта 35 генерируется на основе первых комбинированных сигналов 41 и вторых комбинированных сигналов 42, виртуально выведенных из первых комбинированных сигналов 41. Таким образом, внутреннее изображение имеет высокую плотность минимальных элементов изображения и прекрасное пространственное разрешение.
Генератор 36 изображения отображает внутренность контролируемого объекта 35 на основе первых комбинированных сигналов 41 и вторых комбинированных сигналов 42, которые генерируются генератором 31 комбинированного сигнала в модулях множества групп 13 (131, 132,…, 13М) элементов, как показано на фиг. 4С.
Соответствующие оси времени первых комбинированных сигналов 41 и вторых комбинированных сигналов 42 соответствуют диапазону линии пучка, определяемой в координатном пространстве контролируемого объекта 35. Изображение генерируется посредством установки освещённости пикселей на линии пучка в соответствии с интенсивностью колебаний первых комбинированных сигналов 41 и вторых комбинированных сигналов 42.
В каждом варианте осуществления изобретения линия пучка точно устанавливается на основе первых комбинированных сигналов 41 и вторых комбинированных сигналов 42, которые виртуально выводятся из первых комбинированных сигналов 41. Таким образом, внутреннее изображение контролируемого объекта 35 имеет высокую плотность пикселей и прекрасное пространственное разрешение.
Генератор 36 изображения может отображать различные параметры информации, такие как форма колебания каждого сигнала 25 обнаружения (фиг. 3А), линии пучка первых комбинированных сигналов 41 и вторых комбинированных сигналов 42 (фиг. 4В), траектория 14 распространения каждой ультразвуковой волны (фиг. 2А-2С), виртуальная траектория распространения, начальное положение С каждой группы элементов, и фокусное положение F, в дополнение к внутреннему изображению контролируемого объекта 35, как описывалось ранее.
Такой генератор 36 изображения является достаточным до тех пор, пока он может отображать цифровые данные, и может быть, например, так называемым РС монитором, телевизионным монитором или проектором. Генератор 36 изображения может конфигурироваться таким образом, чтобы отображать описанную выше информацию после преобразования её в аналоговый сигнал, аналогичный сигналу электроннолучевой трубки. Кроме того, генератор 36 изображения может иметь так называемую функцию пользовательского интерфейса для подачи звукового сигнала тревоги и/или светового излучения, в соответствии с определёнными условиями и операцией ввода, например, через сенсорную панель.
Второй вариант осуществления изобретения
Второй вариант осуществления настоящего изобретения поясняется со ссылками на фиг. 6. На этой фиг. 6 каждый компонент, имеющий конфигурацию или функцию, аналогичную показанной на фиг. 1, обозначается аналогичными ссылочными позициями и повторное описание не приводится.
Ультразвуковой дефектоскоп 10, в соответствии со вторым вариантом осуществления изобретения, также содержит переключающий модуль (т.е. переключатель) 37, который линейно сканирует группы 13 элементов, подключенные к возбудителю 18 элементов, когда решётка пьезоэлектрических элементов 33 смещается на один шаг.
Во втором варианте осуществления изобретения каждый раз получается набор из первого комбинированного сигнала 41 и второго комбинированного сигнала 42, возбуждаемые группы 13 элементов последовательно перемещаются на один шаг.
В результате, поскольку необходимо обеспечивать только такое количество каналов управления в возбудителе 18 элементов и приёмнике 23 сигналов, которое равно количеству пьезоэлектрических элементов 33, составляющих группы 13 элементов, схема может быть упрощена.
Третий вариант осуществления изобретения
Далее описывается третий вариант осуществления настоящего изобретения со ссылками на фиг. 7. На фиг. 7 каждый компонент, имеющий конфигурацию или функцию, аналогичную показанной на фиг. 6, обозначен аналогичными ссылочными позициями и повторное описание не приводится.
Возбудитель 18 элементов в ультразвуковом дефектоскопе 10 по третьему варианту осуществления изобретения возбуждает пьезоэлектрические элементы 33 на основе времени 22 задержки возбуждения, которая вычисляется из фокусного расстояния d и угла падения Θ ультразвукового пучка на выходе из группы 13 элементов, и таким образом выходят ультразвуковые волны.
Вычислитель 12 времени задержки возбуждения вычисляет время 22 задержки возбуждения в соответствии с условиями, определяемыми схемой 17 определения пучка. Поскольку время 22 задержки возбуждения является значением, которое уникально для относительного положения в каждой возбуждаемой группе 13 пьезоэлектрических элементов 33, время 22 задержки возбуждения сохраняется в запоминающем устройстве в ассоциации с каналом управления возбудителя 18 элементов.
Как показано на фиг. 8А, испускание ультразвукового пучка выполняется путем возбуждения решётки пьезоэлектрических элементов 33, составляющих первоначальную группу 131 элементов, с синхронизацией на основе времени 22 задержки возбуждения. В результате, ультразвуковой пучок испускается, сходясь в фокусной точке.
Кроме того, как показано на фиг. 8В и 8С, решётка пьезоэлектрических элементов 33, составляющих каждую из групп 132 … 13Мэлементов, смещённую на один шаг, аналогично возбуждается с синхронизацией на основе времени 22 задержки возбуждения. Таким образом ультразвуковой пучок может линейно перемещаться вместе с точкой сходимости.
Кроме того, как показано на фиг. 9, генератор 31 комбинированного сигнала генерирует каждый первый комбинированный сигнал 41 и каждый второй комбинированный сигнал 42 на основе времени 21 задержки, которое получается путем добавления времени 22 задержки возбуждения.
Далее будет описываться способ ультразвуковой дефектоскопии, в соответствии с одним вариантом осуществления изобретения, на основе схемы с нумерацией этапов, показанной на фиг. 10, со ссылками, при необходимости, на фиг. 1, фиг. 5А-5F, фиг. 7 и фиг. 8А-8С.
На первом этапе S11 определяется каждая группа (131,132 … 13М) элементов как заданное количество N последовательных пьезоэлектрических элементов 33, которые выбираются из всех пьезоэлектрических элементов 33, составляющих датчик-решетку 34. Кроме того, определяются фокусные положения F, соответствующие группам 13 элементов. Затем, определённые таким образом информация по каждой группе 13 элементов и фокусные положения F сохраняются в памяти.
На следующем этапе S12 вычисляется траектория 14 распространения (фиг. 2А-2D) каждой ультразвуковой волны, проходящей через фокусное положение F в контролируемый объект 35, на основе комбинирования пьезоэлектрических элементов 33, которые выбраны для ввода и вывода ультразвуковых волн из пьезоэлектрических элементов 33, упорядоченных в группе 13 элементов.
На следующем этапе S13 вычисляется время 21 задержки каждой ультразвуковой волны в комбинации пьезоэлектрических элементов 33 на основе каждой траектории 14 распространения.
На следующем этапе S14 возбуждают пьезоэлектрические элементы 33, так чтобы выводить ультразвуковые волны.
На следующем этапе S15 приёмник 23 сигналов принимает сигналы обнаружения (фиг. 2А-2D), выпущенные от соответствующих пьезоэлектрических элементов 33, которые обнаружили ультразвуковые волны, отражённые внутри контролируемого объекта 35.
На следующем этапе S16 генерируются первые комбинированные сигналы 41 (411, 412,…, 41М) путем составления группы сигналов 25 обнаружения на основе значений 21 времени задержки (фиг. 2D и фиг. 3А-3С).
На следующем этапе S17 генерируются вторые комбинированные сигналы 42 (421, 422,…, 42М) с помощью виртуальной обработки (фиг. 4А и фиг. 4В).
На следующем этапе S18 выполняется формирование изображения внутренности контролируемого объекта 35 на основе первых комбинированных сигналов 41 и вторых комбинированных сигналов 42, оба типа сигналов генерируются в каждой из множества групп (131,132 … 13М) элементов, определяемых путем смещения пьезоэлектрических элементов 33 на один шаг.
На следующем этапе S19 определяется, является ли завершённой обработка по формированию изображения на этапе S18 для всех групп 13 элементов или нет, при этом вся обработка завершается, когда подтверждается этот результат определения.
С помощью ультразвукового дефектоскопа по меньшей мере одного из описанных выше вариантов осуществления изобретения возможно улучшить пространственное разрешение дефектоскопии, за счет использования реально генерированных первых комбинированных сигналов и виртуально генерированных вторых комбинированных сигналов, когда размер каждого из пьезоэлектрических элементов 33, составляющих датчик-решетку, сохраняется неизменным.
Выше были описаны некоторые варианты осуществления настоящего изобретения. Эти варианты осуществления изобретения представлены в качестве примеров. Однако ограничение объёма настоящего изобретения не предполагается. Эти варианты осуществления изобретения также могут использоваться в различных других режимах, и могут быть различным образом пропущены, заменены, изменены, и скомбинированы без выхода за пределы сущности изобретения. Варианты осуществления изобретения и их вариации охватываются объёмом и сущностью настоящего изобретения. Аналогичным образом, эти варианты осуществления изобретения и их вариации охватываются изобретением, описанным в пунктах формулы изобретения, а также во всём диапазоне его эквивалентов.
Составные элементы ультразвукового дефектоскопа могут быть получены с помощью процессора компьютера, и могут управляться с помощью программы ультразвуковой дефектоскопии.
Описанный ультразвуковой дефектоскоп содержит: устройство управления; внешнее запоминающее устройство; устройство отображения, такое как дисплей; устройство ввода, такое как «мышь» и клавиатура; и интерфейс (I/F) связи. В устройстве управления используется высоко интегрированный процессор, такой как специализированная микросхема, FPGA (Field Programmable Gate Array, программируемая пользователем вентильная матрица), GPU (Graphics Processing Unit, блок обработки графики), CPU (Central Processing Unit, центральный процессор). Запоминающее устройство может быть ROM (Read-Only Memory, постоянное запоминающее устройство), RAM (Random-Access Memory, запоминающее устройство с произвольной выборкой) и т.п. Внешним запоминающим устройством может быть HDD (Hard Disk Drive, накопитель на жёстком диске), SSD (Solid-State Disk, полупроводниковый диск), и т.п. Это устройство может быть реализовано с помощью аппаратных средств посредством использования обычного компьютера.
Программа, выполняемая в ультразвуковом дефектоскопе, предварительно реализована в ПЗУ (ROM) и т.п. и предоставлена. Альтернативно, программа может сохраняться в считываемой компьютером запоминающей среде в устанавливаемой или выполняемой форме. Этой средой могут быть CD-ROM (Compact Disk Read Only Memory, компакт-диск без возможности перезаписи), CD-R (Compact Disc Recordable, компакт-диск одноразовой записи), карта памяти, DVD (Digital Video Disk, цифровой видеодиск), гибкий диск (FD, floppy disk) и т.п.
Программа, выполняемая в ультразвуковом дефектоскопе, в соответствии с этим вариантом осуществления изобретения, может сохраняться компьютере, подключенном к сети, такой как Интернет, загружаться через эту сеть и предоставляться.
Реферат
Использование: для ультразвуковой дефектоскопии. Сущность изобретения заключается в том, что ультразвуковой дефектоскоп содержит датчик-решетку, схему определения группы элементов, вычислитель, приёмник сигналов и генератор. Датчик-решетка содержит множество пьезоэлектрических элементов, причём каждый из указанного множества пьезоэлектрических элементов выполнен с возможностью передавать и принимать ультразвуковую волну в контролируемый объект и от него. Схема определения группы элементов выполнена с возможностью выбирать в качестве группы элементов несколько последовательных пьезоэлектрических элементов из указанного множества пьезоэлектрических элементов; устанавливать начальное положение группы элементов на основе информации о компоновке решётки из указанного множества пьезоэлектрических элементов в группе элементов и на основе весового значения для каждого из указанного множества пьезоэлектрических элементов в группе элементов, а также вычислять траектории распространения ультразвукового пучка от группы элементов на основе начального положения и заданного угла преломления. Вычислитель выполнен с возможностью вычислять время задержки для каждого из множества пьезоэлектрических элементов в группе элементов таким образом, чтобы ультразвуковой пучок конфигурировался для распространения вдоль траектории распространения. Приёмник сигналов выполнен с возможностью принимать в качестве сигналов обнаружения соответствующие ультразвуковые волны, принятые указанным множеством пьезоэлектрических элементов. Генератор выполнен с возможностью генерировать по меньшей мере один комбинированный сигнал для ультразвукового пучка, имеющего указанную траекторию распространения, на основе указанных сигналов обнаружения и времени задержки. Технический результат: обеспечение ультразвуковой дефектоскопии с улучшенным пространственным разрешением обнаружения дефектов. 3 н. и 4 з.п. ф-лы, 23 ил.
Формула
Документы, цитированные в отчёте о поиске
Ультразвуковой датчик с большим полем обзора и способ изготовления данного ультразвукового датчика
Комментарии