30
ческих импульсов и отраженных акусти- 20 терзал TI, характеризующий зазор, по-
ческих импульсов .
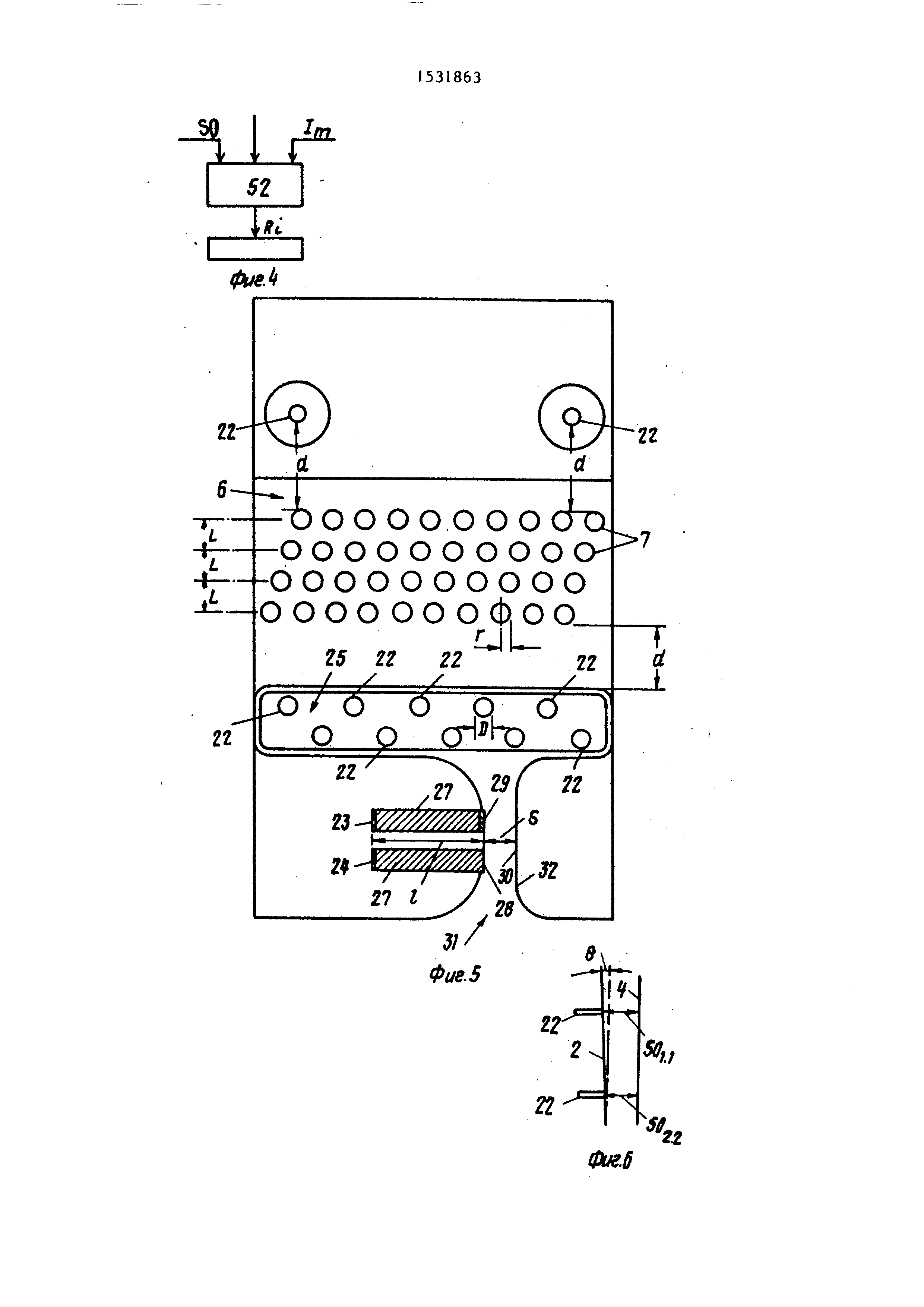
Датчики 22 (фиг. 1-8) имеют цилиндрическую
форму с диаметром D величиной около 6 мм. Импульсы возбуждения в датчиках 22 приводят к передаче 25
акустических волн с частотой порядка 1 МГц. С этой рабочей частотой датчики
22 работают с полем в области на расстоянии D /, так что форма поля
остается существенно коллимированной на расстоянии зазора, т.е. в основном
может приспосабливаться к максимальной величине зазора менее 20 мм. Пространственная
разрешакидая способность такого датчика составляет величину порядка от 5 до 10 мм.
Выбор этих размеров и рабочей частоты могут изменяться. Например, диаметр
D (Лиг. 5) может увеличиваться, чтобы получить более длинную колли-
мированную соседнюю область с меньшей чувствительностью к неровным поверх-,
ностям стенки 4 скважины 1. Однако большой диаметр обеспечивает менее
высокую разрешающую способность вели- . чины зазора.
Частота датчика 22 может быть увеличена для получения лучшего диапазона
разрешающей способности и более
35
40
длинной соседней области поля. Однако
увеличение частоты приводит к возрастанию чувствительности, к неровностям
поверхности и сильному ослаблению акустической волны.
Акустическая линия 27 задержки жет быть увеличена по длине 1 для
расширения величины наблюдаемого зазора и уменьшения кольцевого эффекта
источника, если он имеется. Однако
лучается при определении акустического
отражения импульса от стенки 4 скважины ). Индикация величины зазора
может быть получена при помощи измерения времени прохождения акустического
импульса к стенке 4 и вычитания из него времени прохождения к поверхности
28 раздела. Зазор должен измеряться таким образом, чтобы обеспечить различие в определении толщины
, отличающихся друг от друга приблизительно на 5 мм.
Однако изменение давления и температуры по глубине скважины влияет на
время прохождения акустического импульса через линию 27 задержки и скорость
акустической волны в буровом растворе, что искажает показания датчиков
22, определяющих величину зазора . Для измерения воздействия окружающих условий буровой скважины 1
на датчики 22 применяют датчики 23 и 24, каждый из которых снабжен линией 27 задержки.
Калибровочный акустический датчик (преобразователь) 23 (фиг. 5) имеет
конструкцию, подобную конструкции акустического датчика 22 для определения
зазора, и снабжен мишенью в виде отражающей поверхности 29, обеспечивающей
получение акустических отражений , возникающих под действием акустических -импульсов от калибро--
вочного акустического датчика 23 и детектируемых им.
Измерительный акустический датчик 24 скорости V акустической волны в
буровом растворе снабжен мишенью в вчце отражающей поверхности 30 и па0
0 терзал TI, характеризующий зазор, по-
5
5
0
лучается при определении акустического отражения импульса от стенки 4
скважины ). Индикация величины зазора может быть получена при помощи измерения
времени прохождения акустического импульса к стенке 4 и вычитания
из него времени прохождения к поверхности 28 раздела. Зазор должен
измеряться таким образом, чтобы обеспечить различие в определении толщины
, отличающихся друг от друга приблизительно на 5 мм.
Однако изменение давления и температуры по глубине скважины влияет на
время прохождения акустического импульса через линию 27 задержки и скорость
акустической волны в буровом растворе, что искажает показания датчиков
22, определяющих величину зазора . Для измерения воздействия окружающих условий буровой скважины 1
на датчики 22 применяют датчики 23 и 24, каждый из которых снабжен линией 27 задержки.
Калибровочный акустический датчик (преобразователь) 23 (фиг. 5) имеет
конструкцию, подобную конструкции акустического датчика 22 для определения
зазора, и снабжен мишенью в виде отражающей поверхности 29, обеспечивающей
получение акустических отражений , возникающих под действием акустических -импульсов от калибро--
вочного акустического датчика 23 и детектируемых им.
Измерительный акустический датчик 24 скорости V акустической волны в
буровом растворе снабжен мишенью в вчце отражающей поверхности 30 и пазон 31 заданной ширины S, который выполнен на буровом инструменте 2, заполнен
буровым раствором и расположен между акустическим датчиком (преобразователем ) 24 скорости акустической
волны в буровом растворе и отражающей поверхностью 30, обеспечивающей получение
акустических отражений, регистрируемых датчиком 24. Паз 31 вырезан в стенке 32 нижней части сегмента
3 бурового инструмента 2. Однако паз 31 может быть выполнен и в другом
месте бурового инструмента 2 в окрестности ряда 6 датчиков 7. Предпочтительнее
размещать паз 31 сбоку или в стороне от сегмента 3 бурового инструмента 2.
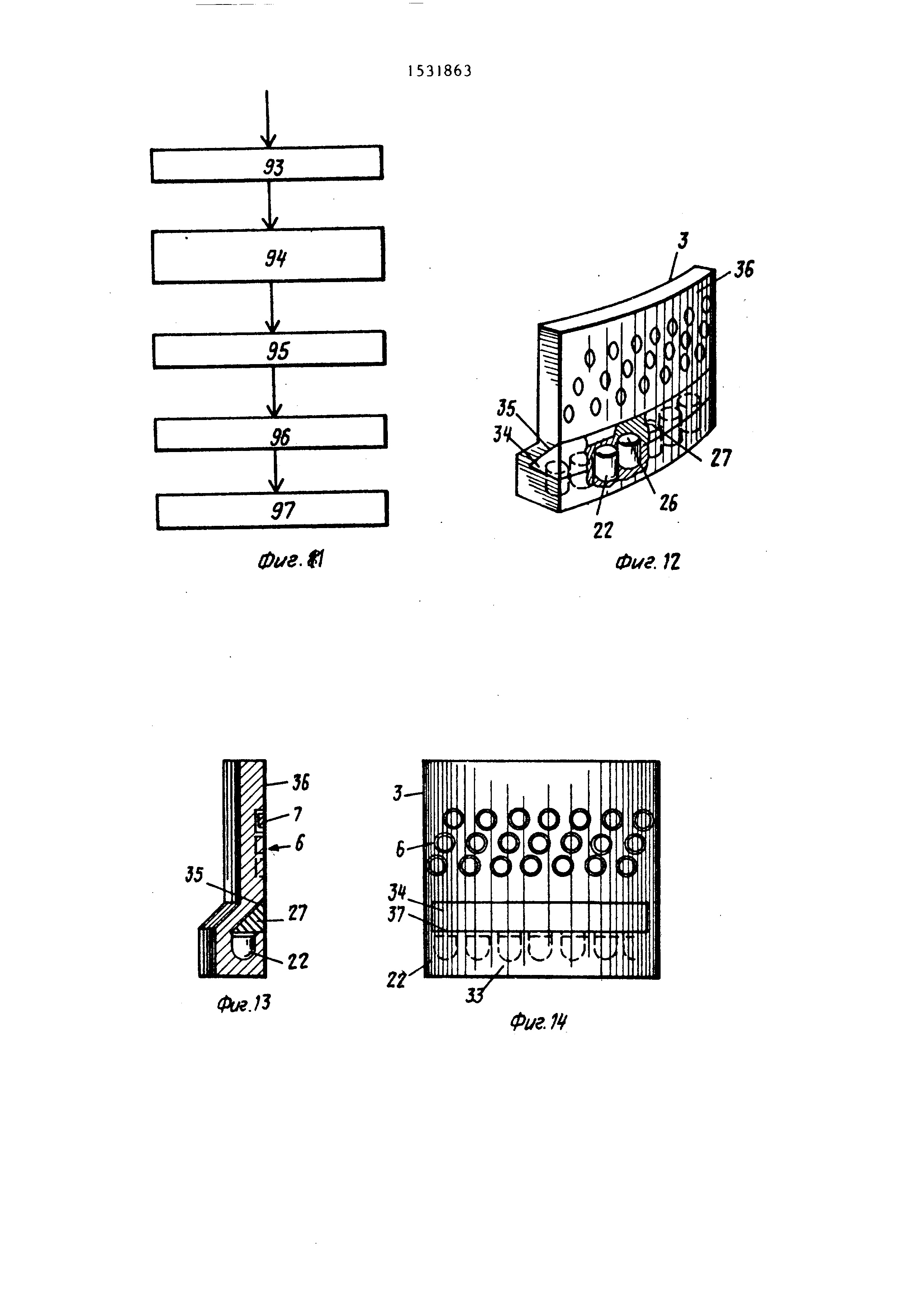
Возможны также различные модификации вьтолнення ряда акустических датчиков 22. В первой модификации
(фиг. 12-14) средства для направления импульсов акустической энергии в направлении
стенки 4 скважины 1 имеют
акустические датчики 22 для определе- 25 рогового уровня, когда акустическое
ния зазора, которые расположены в поперечном относительно продольной оси
бурового инструмента 2 ряду 33 и смонтированы в углублении 34 ниже ряда
6 электродов. Акустические датчики 22 имеют общую отражающую поверхность
35, которая установлена в уг- - лублении 34 сегмента 3 бурового ин-
струмента 2 под углом 45 к его боковой поверхности 36 и к направлению
акустических пучков датчиков 22, расположенных на поверхности 37 раздела,
1которая находится против отражающей поверхности 35. Углубление 34 заполнено
материалом, который выполняет функцию акустической линии 27 задержки по
ческому импедансу бурового раствора
скважины 1. Ряд 33 акустических датчиков 22 для определения зазора расположен
на расстоянии от отражающей поверхности 35 и от боковой поверхности
36 бурового инструмента 2, исключающем наложение возбужденных акустическими датчиками 22 импульсов
и импульсов, отраженных от стенки 4 буровой скважины 1. Ряд 33 датчиков
22 расположен вдоль поверхности 36, кривизна которой соизмерима с кривизной стенки 4 скважины 1.
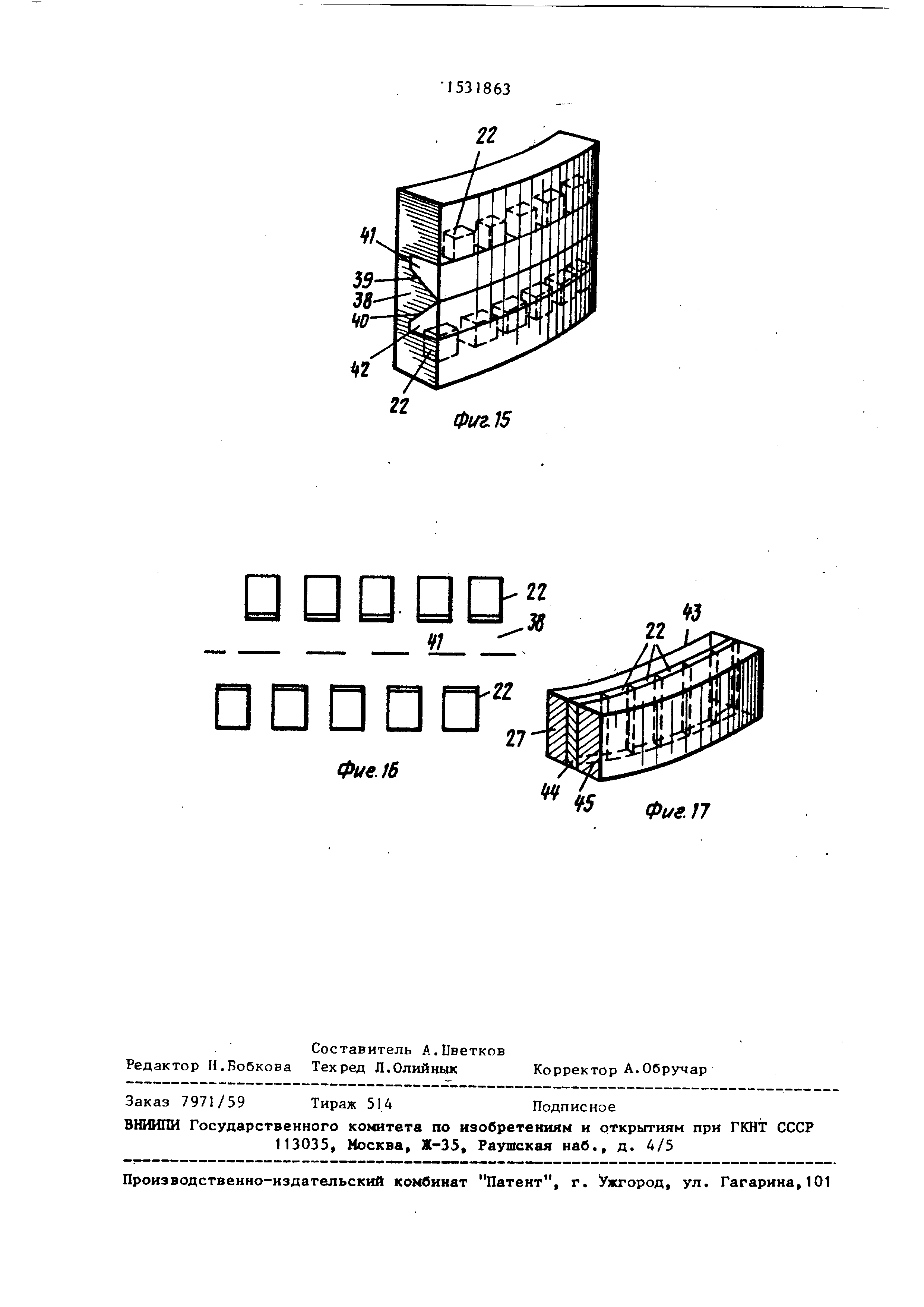
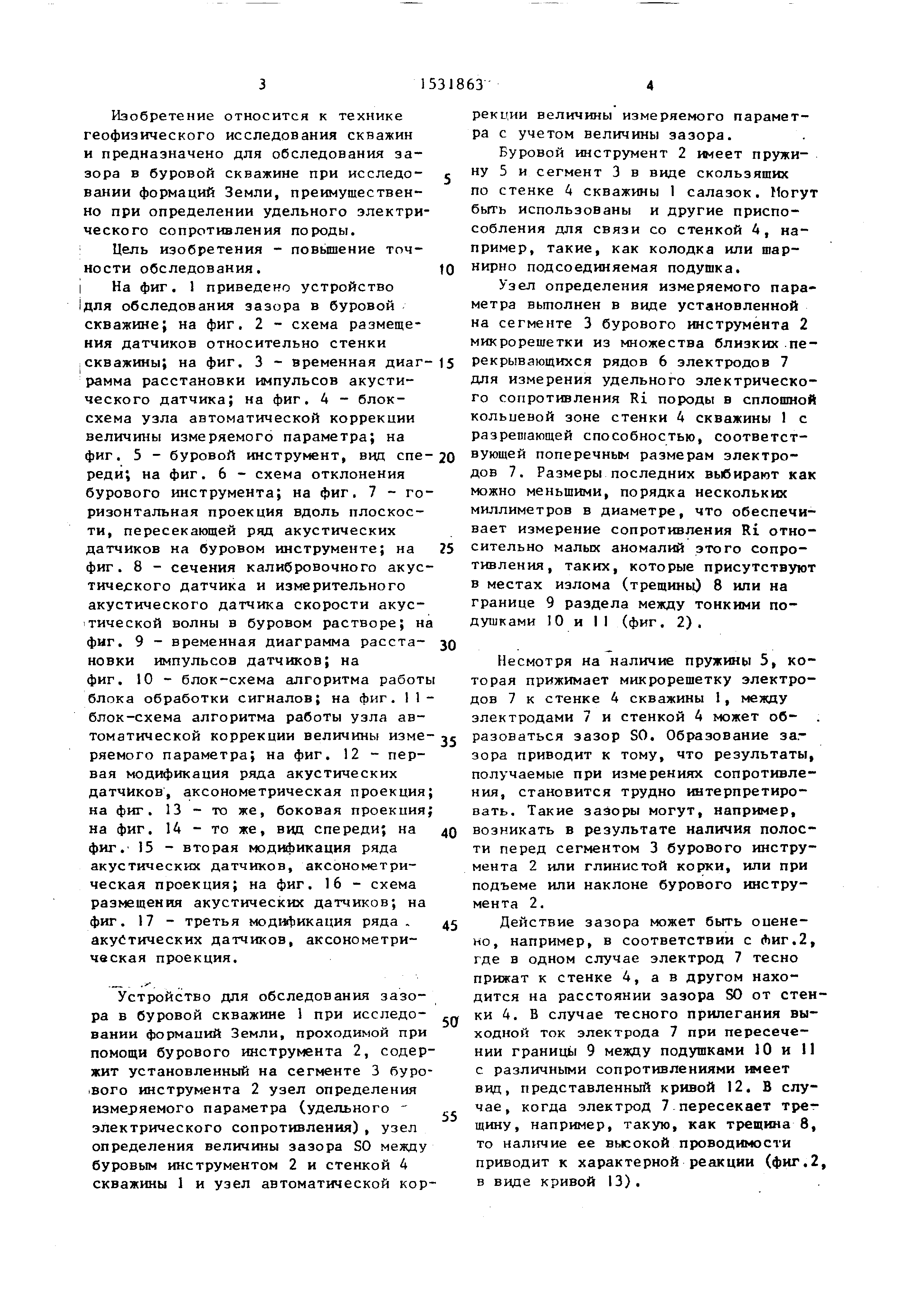
Вторая модификация ряда 38 акусти ческих датчиков 22 (фиг. 15 и 16) вы
полнена в вцце двух рядов (фиг.15) с г
и .приближается как можно ближе
акустическому импедансу к акустиотражающими поверхностями 39 и 40 в
соседних углублениях 41 и 42, которые заполнены материалом, выполняющим роль линии 27 задержки.
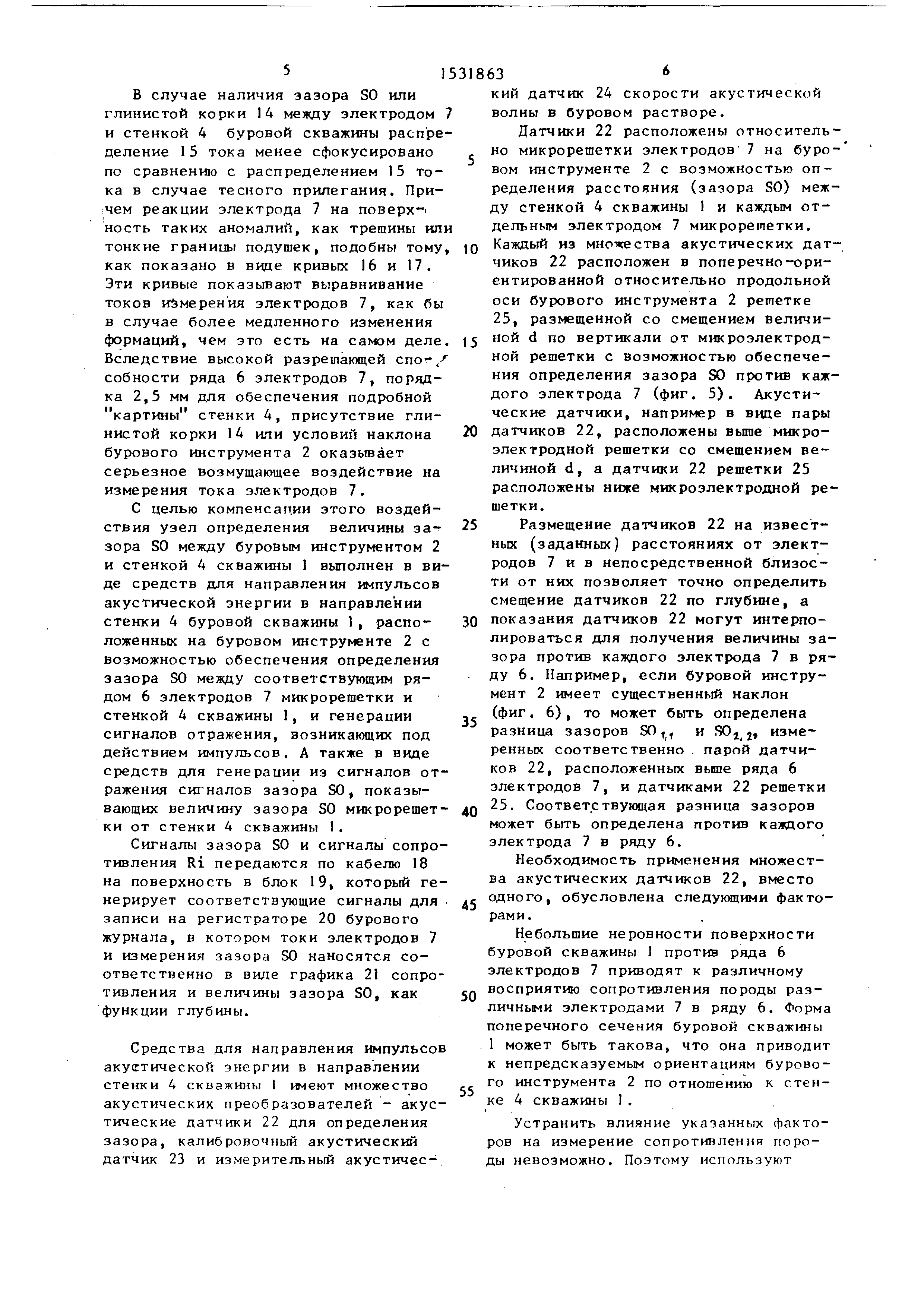
Третья модификация ряда 43 акустических датчиков 22 (фиг. 17) образована
посредством слоя 44 из акустического материала, генерирующего импульсы . Ряд 43 расположен сверху и
прикреплен к слою 45 из акустического абсорбирующего материала. Слоем 44
ряд 43 разделен на отдельно возбуждающиеся датчики 22, из которых генерирует луч акустической энергии
через слой линий 27 задержки.
Средства для направления импульсов
акустической энергии в направлении стенки 4 скважины 1 содержат узлы 46
для определения момента превышения сигналами отражения порогового уровня
, определяемого шумовыми импульсами , и узлы 47, реагирующие на калибровочные
сигналы, для уменьшения поотражение не определяют внутри периода
времени, определяемого калибровочными сигналами.
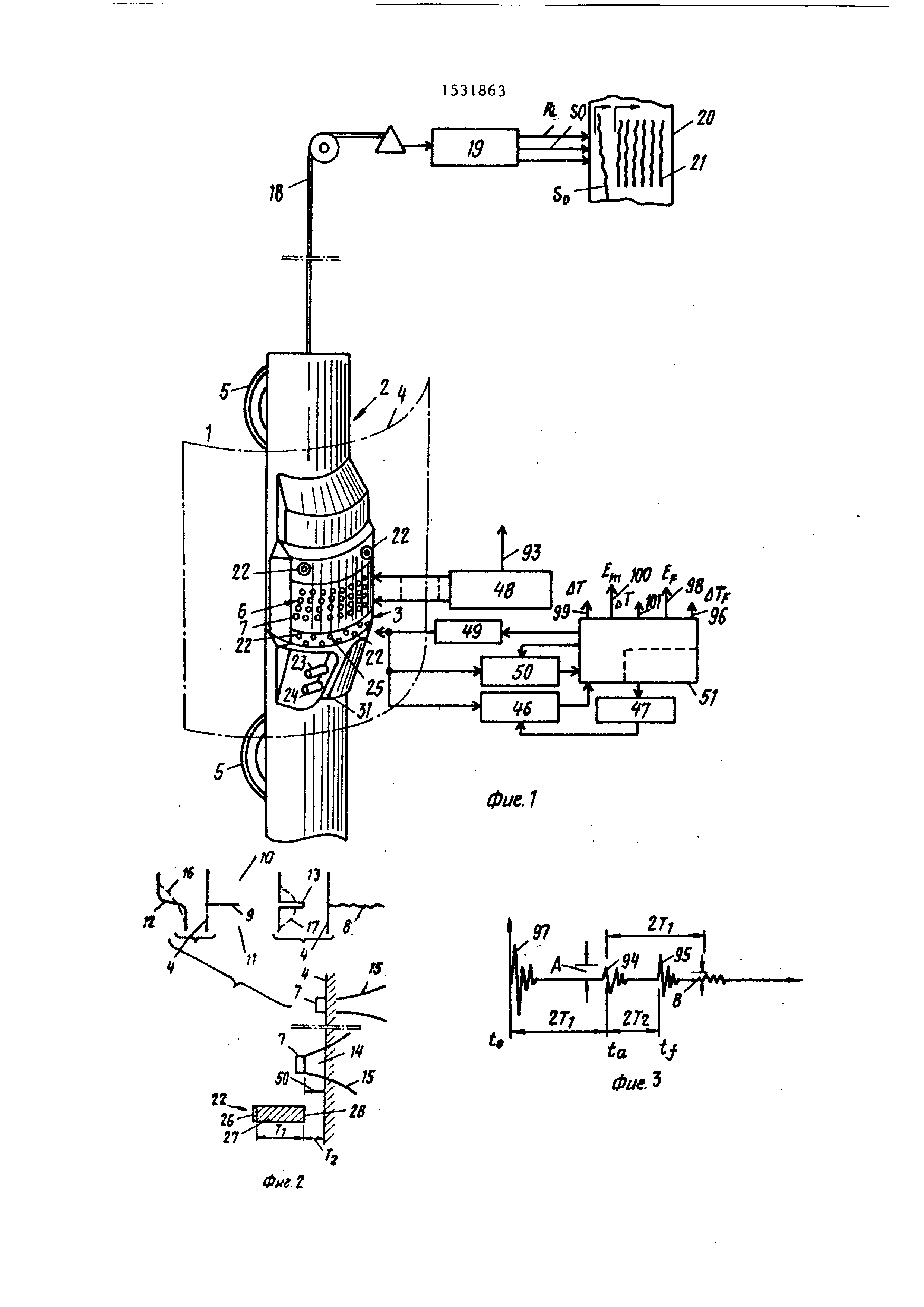
В состав устройства (фиг. 1) вхо- 0 дит блок 48 коммутации токов I j
электродов 7, а также генераторы 49 импульсов и импульсный усилитель 50,
связанные с блоком 51 обработки сигналов , и узел 52 (фиг, 4) автоматие
ческой коррекции величины измеряемого параметра (удельного электрического
сопротивления породы) с учетом величины зазора.
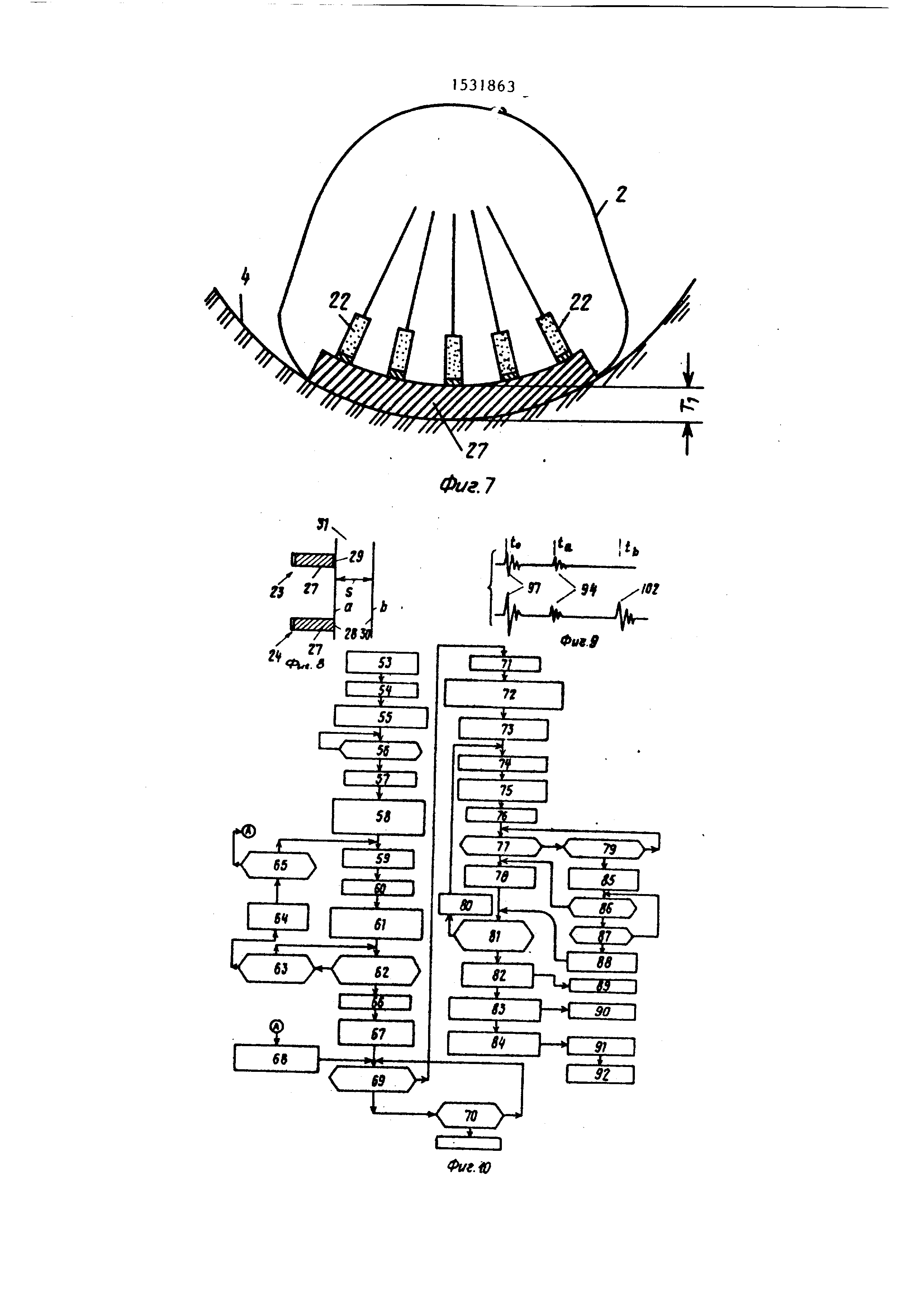
Блок-схема (Аиг. 10) алгоритма ра- 0 боты блока .51 обработки сигналов
включает следующую последовательность операций: 53 - включение калибровочного
акустического датчика 23; 54 - запоминание времени to включения дат-
5 чика 23; 55 - выбор уровня срабатьша- ния, исключающего шумы .системы; 56 -
есть, отражение или нет от поверхности 29; 57 - запоминание времени t с,
прихода отражения от поверхности 29; 58 - измерение интервала , ta- - t.
0
cat - а
Q калибровки; 59 - включение измерительного акустического датчика 24;
60 - запоминание времени t включения датчика 24; 61 - установка вре-
менного окна поверхности 28 раздела; 62 - есть отраженный сигнал или нет
от поверхности 28 раздела; 63 - меньше временного окна или нет; 64 -
уменьшение до низшего уровня срабаты11
вания, превышающего шум системы; 65 - уровень срабатьшания на нижнем пределе
или нет; 66 - запоминание, времени to прихода отраженного импульса от
поверхности 28; 67 - измерение амплитуды отраженного сигнала от поверхности 28; 68 - установка времени
ДТрдй и амплитуды отраженного сигнала; 69 - есть отраженный сигнал или
нет от поверхности 30; 70 - установка времени ожидания; 71 - запоминание
времени tj прихода отраженного сигнала от поверхности 30; 72 - измерение интервала времени ЛТ t - t
- ( ; 73 - вычисление скорости акустической волны в буровом растворе;
74 - вкл)очение акустического датчика 22; 75 - установка уровня срабатьшания
датчика 76 - запоминание времени включения датчика 22; 77 - есть возврат или нет акустического
сигнала от стенки 4 скважины; 78 - запоминание времени t прихода сигнала
от стенки 4; 79 - задержка лТ ,«{
80- увеличение числа датчиков 22;
81- все датчики 22 включены или нет;
82- определение интервала времени,
соответствующего величине зазора;83 -. определение скорости акустической
воЛны в буровом растворе; 84 - спрос токов 1 злектродов; 85 - установка
более низкого уровня срабатьшания датчика 22; 86 - возврат больше порога
срабатьшания или нет; 87 - больше времени Т.или нет; 88 - установка
максимального времени прихода отражения от поверхности 30; 89 - регистрация
зазора; 90 - регистрация произведения интервала времени, соответствующего
зазору, на скорость акустической волны в буровом растворе; 91 -
регистрация токов I „ электродов; 92 - возврат к операции 33.
Средства для генерации из сигналов отражения сигналов зазора SO имеют
узлы 53 и 54 (фиг. 10,), реагирующие на определяемые акустические отражения
, возникающие под действием акустических импульсов от калибровочного
акустического датчика 23 для генерации акустических калибровочных сигналов
, соответствующих калибровке датчика 22 для обследования зазора, как
функции глубины. Средства для генерации из сигналов отражения сигналов зазора SO имеют узлы 72 и 73,
реагирующие на определяемые акустические отражения, возникающие под
10
15
20
25
153186312
действием акустических импульсов от
измерительного акустического датчика 24 скорости акустической волны в бу-
РОБОМ растворе для генерации калибровочных сигналов, соответствующих скорости
акустической волны в буровом растворе, как Лункции глубины, и узлы 89 - 91 для коррекции величины
сиг нала зазора в соответствии с акустическими калибровочными сигналами и
калибровочными сигналами скорости акустической волны в буров ом раство- ре.
Блок-схема (фиг. И) алгоритма работы узла 52 автоматической коррекции величины измеряемого параметра
включает следующую последовательность операций: 93 - измерение зазора SO
для каждого злектрода; 94 - нценти- фикация тока злектрода в виде функции
зазора SO; 95 - вдентификация области постоянного зазора 80; 96 - выполнение
операции коррекции; 97 - регистрация скорректированных значений
удельного электрического сопротивления .
Способ для обследования зазора в
буровой скважине осуществляется сле- 30 дующим образом.
При исследовании формации Земли измеряют удельное сопротивление породы
инструментом 2, на сегменте 3 которого имеется микроэлектродная решетка
для измерения удельного электрического сопротивления породы в
дискретных точках множества близких, перекрьтающихся рядов 6, обеспечивающая
измерение удельного сопротивления породы в сплошной кольцевой зоне
стенки 4 скважины 1 с разрещающей способностью, соответствующей поперечным
размерам электродов 7 в решетке . Направляют к стенкам 4 скважины
1 основные узконаправленные импульсы акустической энергии, детектируют отраженные
от стенки 4 скважины 1 акустические сигналы, определяют из отраженных
акустических сигналов величины зазора SO между электродами 7 и стенкой
4 скважины 1 и корректируют значения измеренных величин удельного
сопротивления с учетом величины зазора SO. При этом осуществляют направление
основных узконаправленных siMnynbcoB акустической энергии к отдельным сегментам стенки 4 скважины
1 от части инструмента 2, находящейся по его длине вблизи микроэлектрод35
40
45
50
55
.15
ной решетки, от акустических преобразователей 22 из множества точек, положение
которых относительно каждого электрода 7 решетки задано и которые
распределены относительно микроэлектродной решетки с возможностью определения расстояния между стенкой 4
скважины 1 и каждым отдельным электродом 7 регаетки, а импульсы акусти-
ческой энергии образуют лучи, размеры поперечного сечения которьк соизмеримы
с пространственной разрешающей способностью, обеспечиваемое электродами
7. Дополнительно направляют пер- вые испытательные акустические импульсы
от первого калибровочного преобразователя 23 на первую мишень 29
на инструменте 2, которую располагают от первого калибровочного преобразователя
23 на расстоянии, исключающем наложение возбужденных указанным преобразователем 23 импульсов и импуль
сов, отраженных от первой мишени 29. Детектируют отраженные от первой мишени
29 первые испытательные импульсы , из которых получают калибровочные
сигналы, изменяющиеся в функции глубины . Направляют вторые испытаУель-
ные акустические импульсы от второго Измерительного преобразователя 24 через
буровой раствор на вторую мигаень 30 на инструменте 2, которую располагают
от второго измерительного преобразователя 24 на расстоянии, исключающем наложение возбужденных
преобразователем 24 импульсов и импульсов , отраженных от второй мишени
30. Детектируют отраженные второй мишенью 30 вторые испытательные импульсы
, из которых получают сигналы, определяющие скорость акустической волны в буровом растворе в функции
глубины, а величину зазора SO между электродами 7 и стенкой 4 скважины 1
корректируют с учетом калибровочных сигналов и сигналов, определяющих
скорость акустической волны в буровом растворе. Кроме того, направляют дополнительные
узконаправленные импульсы акустической энергии из точек инструмента 2,которые располагают вьппе
и ниже микрозлектродной решетки, если смотреть вдоль направления инструмента 2.
Устройство для реализации предлагаемого способа работает следующим образом.
0
863
5
0
0
5
0
5
14
Опрос измерительных токов Т ; электродов 7 осуществляется блоком 48
коммутации (фиг, I). Опрашиваемые измерительные токи на выходе линии
93 передаются по кабелю 18 к блоку 19, в котором преобразуются для записи
на регистраторе 20. Блок 51 обработки сигналов управляет работой датчиков
22 - 24 в последовательности, определяемой генераторами 49 импульсов
, и обеспечивает определение интервала времени с помощью импульсного
усилителя 50. Отраженные сигнйлы усиливаются с помощью узла 46, уровень
срабатьшания которого задается с помощью узла 47, управляемого блоком
51. Воспринимаются и анализируются такие, например, отраженные акустические
сигналы, как сигнал 94 (фиг.З) от то-рцовой поверхности 28 и сигнал
9э от поверхности 30 стенки 32. Эти сигналы содержат временные интервалы
ДТ г на линии 96 для обеспечения про5 хождения сигнала 95 с момента начала
акустического импульса 97, который обуславливает акустический отраженный
сигнал и величину F в линии 98 отраженного сигнала 95, характеризующую
пиковое значение энергии ипи ее количество . Сигнал временного интервала
u f c.at линии 99 представляет собой время Т импульса 97, необходимое для
его перемещения через линио 27 за- держки. Сигнал Е в линии 100 характеризует
собой величину отраженного от поверхности 28 сигнала 94. Сигнал,
характеризующий скорость V акустической волны в буровом растворе, передается
по. линии 101 в виде измеряемого интервала ДТ времени, необходимого для преодоления акустическим
импульсом 97 в буровом растворе расстояния в виде ширины паза 31.
Блок 51 обработки сигналов начинает работу под действием, датчика 23 в
момент времени t, при зтом поверхностью 29 генерируется существенный
отраженный сигнал 94, а в конце инQ тервала, соответствующего времени
прохождения через линию 27 задержки, возврат определяется временем t. В
следующий момент времени под действием датчика 24 генерируется импульс
97, который проходит через линию 27 задержки. Акустический импеданс материала
линии 27 задержки выбирают как можно ближе к акустическому импедансу бурового раствора в скважине.
1, чтобы отражения, возникающие на
поверхности 28 раздела, были очень малы. Несмотря на выбор таких материалов импеданс не согласовьшается
точно, что приводит к образованию на торцовой поверхности 28 существенного
отраженного сигнала 94. Короткий интервал времени после акустического
импульса, передаваемого через пространство S и попадающего на поверхность
30, позволяет с-существить определение отраженного сигнала 102 в момент времени t, (Лиг. 9) .
Начиная с блока 53 (фиг. 10) срабатывает датчик 23 и время t запоминается
в блоке 54. В блоке 55 устанавливается величина порога срабатывания
. Этот уровень срабатьшания выбирается достаточно вьсоким, чтобы исключить реакцию на шумы системы,
но не слишком высоким, чтобы можно было различить отражение от поверхности
29 и акустическое отражение от поверхности 30 раздела в пазу 31. Выбор
уровня срабатывания можно осуществить , например, изменением коэффициента
усиления усилителя, вход которого соединен через мультиплексор с датчиком 22. В этом случае может
быть применен компаратор, который сравнивает выходной сигнал усилителя
с фиксированным эталонным значением и определяет акустический отраженный
сигнал, когда величина выходного сигнала усилителя превышает это эталонное
значение. Затем в блоке 56 последовательно определяется пришел ли
отраженный сигнал, а когда его приход подтверждается, то время прихода
запоминается в блоке 57. Разница во времени между t, и tj, определяется в
блоке 58 и представляет собой интервал времени , связанный с прохождением акустических импульсов через
линии 27 задержки датчиков 22-24 Срабатьвание датчика 24 скорости
ак устиЧеской волны в буровом растворе регистрируется в блоке 59, а время
срабатьшания запоминается в блоке 60. Затем выбирается временное окно
(интервал ) в блоке 61, продолжительность времени его сравнима с максимальным
интервалом, с которым должно происходить акустическое отражение о
поверхности 28 раздела. Затем делается задержка в блоке 62 и производитс
определение прихода отраженного сигнала , если он не пришел, то делается измерение в блоке 63, прошло ли время заданного временного окна (интервала). Последнее
измерение осуществляется для слу
чая, когда акустические импедансы линии
задержки и бурового раствора ( скважины так близко совпадают, что
акустический отраженный сигнал очень мал для определения. Поэтому, если
временное окно (интервал ) прерывается , то в блоке 64 устанавливается более
низкий уровень ТН срабатьшания и осуществляется возврат к шагу (блоку
) 59. Предпочтительно, чтобы сниже5 ние уровня срабатывания производилось
с малым шагом. Процесс включения датчика 24 и уменьшения порога срабатывания
продолжается до тех пор, пока не определится приход отраженного
0 сигнала от поверхности 28 раздела в блоке 62. Время t, в момент которого
определяется это отражение, запоминается в блоке 66. Амплитуда А отраженного
сигнала на поверхности 28
5 раздела измеряется в блоке 67. Нет
необходимости стремиться к уменьшению порога срабатьшания в блоке 64 ниже
уровня, при котором вместо отраженного сигнала определяется сигнал шума.
0 Соответственно в блоке 65 осуществляется измерение, показьшающее уменьшился
ли порог ТН срабатьшания до его нижнего приемлемого уровня. Такой
уровень представляет функцио шума системы и устанавливается на некотором
уровне выше него. Когда измерен1не показьшает наинизший уровень срабатывания
, то осуществляется следующий шаг в блоке 68, где устанавливается
Q величина для времени tq, равная , и амплитуда отраженного сигнала на
уровне эталонного значения Ад.
Затем осуществляется задержка в
блоке 69, где определяется отраженный
5 от поверхности 30 сигнал 102, т.е.
акустический отраженный сигнал при избыточном значении последнего уменьшающегося
уровня ТН срабатывания. Если отраженного сигнала нет, то всту-
0 пает в действие цикл ожидания, который может исключаться, если в блоке
70 время ожидания превьш1ает максимальное значение Т,.. Время t
приема отраженного сигнала 102 запоминается в блоке 71. Затем в блоке 72
5
5
может быть определен калибровочный
интервал ЛТ в виде разницы между временем t и t и вычитания из этой разницы времени прохождения,
17
представляющего время прохождения
акустического импульса через линию 27 задержки. Скорость акустической волны
в буровом растворе скважины может затем вычислена в блоке 73 в соответствии с формулой
V . -2А-
ДТ
Два датчика 23 и 24 используются для генерации сигналов, представляющих
калибровку dTj,g,j линии 27 задерж- ки и скорости V акустической волны
в буровом растворе скважины. Акустические датчики 22 для обследования
зазора срабатывают, начиная с первого датчика Т, в блоке 74, а время этого
срабатьшания запоминается в блоке 76. В блоке 75 устанавливается уровень
15
срабатьюания с величиной А +d , кото
рая немного больше, чем измеряемая амплитуда А для отраженного сигнала
94 (фиг. 9) на поверхности раздела 28 (фиг. 8), которая измеряется в блоке
67. При помощи такой величины уровня срабатьшания определение отражения от
стенки 4 буровой скважины 1 может быть осуществлено при малой величине
зазора. Определение возвращенных сигналов от запуска первого датчика Т у
анализируется в блоке -27 для определения прихода отраженного сигнала 95
(фиг. 3) при помощи операции, превышает ли отраженный сигнал 95 величину
уровня ТН срабатьшания, которая устанавливается в блоке 75. Если приходит
отражение от поверхности 30, то время t f его прихода запомш ается в
блоке 78 и измеряется содержание его энергии Eg.
В случае, когда нет определения отраженного сигнала от поверхности 30
в блоке 77 от запуска датчика , то вводится цикл ожидания. Если время
отклоняется от заданного, так как ера- батьшание датчика Т в блоке 74 превышает
интервал задержки, которая производится в блоке 79, то новый менее низкий уровень ТН срабаты
вания,- меньший, чем А + U, генерируе- JQ дого зазора обследуемого датчиками 22
мый в блоке 75, устанавливается для последовательно, если требуется, ин- большей эффективности после этого в
блоке 85. Более низкий уровень сратервал , измеряемый при помощи датчиков
22, может регистрироваться в блоке 89 в вице параметра, определякще- го величину зазора.
батьшания обеспечивает последовательное определение малого отражения от
стенки 4 буровой скважины, максимальная акшлитуда которого меньше, чем
отражение, получаемое на поверхности 28 раздела. Изменение до менее иизко7
- о о
.
10
20
8 т о
531863 8
го уровня ТН срабатьшания увеличивает чувствительность в определении малых
отражений от более удаленной поверхности , раздела глинистой корки. Ролее
низкий уровень срабатьшания не устанавливается настолько низко, чтобы он
определял пики шума. Затем осуществляется задержка в блоке 86, во время
которой может определяться акустическое отражение, которое превьшает нижний
уровень срабатьшания и устанавливается в блоке 85. Если акустическое
отражение есть, то делается возврат 15 к блоку 78, чтобы запомнить момент
времени Ц, прихода отражения и измерить величину энергии Е g отражения от стенки 4 скважины.
Когда нет определения акустического отражения в блоке 86, то в блоке
87 осуществляется измерение, превышает ли прошедшее время максимальное
значение Т . Если не превьшает, то ос тцествляется возврат к шягу 86,
чтобы снова определять момент прихода отражения от стенки 4. В случае,
когда не определяется отражение от стенки 4 и проходит максимальное время
, максимальная величина для времени прихода устанавливается в блоке 88
и осуществляется возврат к шагу 81, В шаге (блоке) 81 осуществляется
задержка для определения того, может ли рассмотренный процесс выполняться
для другого датчика Т. Если может, то счетчик соответствующего числа
датчиков 22 производит увеличение числа в блоке 80 и затем включается
следующий датчик Т в блоке 74.
После то.го, как все датчики 22
срабатьшают и определяются сигналы 102 отражения от поверхности 30, в
блоке 82 определяется интервал, определяющий зазор, если он имеется, для
каждого датчика при помощи определения интервала 4 Т ,, для сигнала 102 от-
раже.ния от поверхности 30 и вычитания из него интервала 4Т,,{Для линии 27
задержки. Это осуществляется для каж
дого зазора обследуемого датчиками 22
последовательно, если требуется, ин-
тервал, измеряемый при помощи датчиков
22, может регистрироваться в блоке 89 в вице параметра, определякще- го величину зазора.
Однако более точное определение зазора SO, регистрируемое в блоке 90,
получается при помощи умножения измеряемого интервала, соответствующего
1915
зазору, на измеряемую з блоке 83 скорость
V акустическоЛ волны.
Измерительные токи 1 электродов 7
опрашиваются в блоке 84 или одновременно с работой акустических датчиков
, или последовательно. Опрошенные значения токов 1 регистрируются в блоке 91 и осуществляется возврат к
блоку 92 для начала работы программы с операции 53.
Алгоритм работы блок-схемы осуществляется циклически с высокой скоростью . При этом может производиться
вертикальное перемещение бурового инструмента 2 и оказывается малое влияние
на разрешающую способность по вертикали акустических датчиков 22 для обследования зазора. Скорость
цикла алгоритма работы может изменяться в зависимости от скорости перемещения
бурового инструмента 2, но может быть порядка и нескольких килогерц .
При помощи измерения зазора может быть обеспечено улучшение разрешающей
способности, получаемой при помощи ряда 6 электродов 7, путем использования
соответствующей технологии. Это выполняется при помощи использования
величин зазора, глубины и тока электрода , подаваемьк к узлу 52 автоматической
коррекции зазора (Лиг. А). Последний представляет программу для
блока 51 обработки сигналов, при помощи которой может проводиться декон
волюция данных тока электрода. Такая деконволюция может применяться для
токов электродов, для которых зазор приблизительно постоянен. Схема такого
преобразования может содержать хорошо известные щаги, а сам процесс
деконволюции разреи1ающей способности узла 52 автоматической коррекции зазора
осу ществляется при помощи блок- схемы алгоритма работы этого узла
(фиг. 11). С блока 93 начинается из- ме)ение зазора для каждого кнопочног
электрода 7 в ряду 6, используя устройство и шаги, как описано в отношении
обследования зазора при помощи акусткческих датчиков 22 и при помощи
информации калибровочного датчика 23 и датчика 24 скорости акустическо волны.
В блоке 94 получается функция системы Hj (х, z) , связанная с измерением
зазора. Это может осуществляться при помощи запоминания ряда цифровых
1863
20
значений соответствующих характеристик
для различных величин зазора, таких , например, как от нулевого зазора
до 15 мм зазора на интервалах, например в 5 мм, при этом различные величины
интервалов могут использоваться.
В блоке 95 двек пространственные
области (х, z) стенки буровой скважи-
ны выделяются в районах с приблизительно
постоянным зазором. В блоке 96 эти выбранные районы с практически
постоянным зазором подвергаются про- пессу деконволюпии, чтобы устранить
или по меньшей мере смягчить потери разрешающей способности из-за зазора
и выдать скорректированные в соответствии с зазором значения электрического
сопротивления породы для регистрации в блоке 97.
Предлагаемое техническое решение позволяет повысить точность обследования
зазора в буровой скважине, что обуславливает повышение точности определения
удельного электрического сопротивления породы при исследовании формаций Земли и обеспечивает
возможность проведения вьюокоразре- шающего картографирования поверхности стенки скважины.
Формула изобретения
5
1. Способ для обследования зазора в буровой скважине при исследовании
формаций Земли, предусматривающий из мерение удельного сопротивления породы
инструментом, на сегменте которого имеется микроэлектродная решетка для
0 измерения удельного сопротршления породы в дискретных точках множества
близких перекрьшающихся рядов, обеспечивающая измерение удельного сопротивления
породы в сплошной кольцевой I
- зоне стенки скважины с разрешающей
способностью, соответствующей поперечным размерам электродов в решетке,
направление к стенкам скважины основных узконаправленных импульсов акусQ
тической энергии, детектирование отраженных от стенки скважины акусти -
ческих сигналов, определение из отраженных акустических сигналов величины
зазора между электродами и Стенкой скважины и корректирование значений
измеренных величин удельного сопротивления с учетом величины эазоря., отличающийся тем, что, с
иелью повьщ1ения точности обследования , направление основных узконаправленных
импульсов акустической энергии осуществляют к отдельным сегментам стенки скважины от части инструмента,
находящейся по его длине вблизи микроэлектродной решетки, от акустических
преобразователей из множества точек , положение которых относительно каждого электрода решетки задано и
которые распределены относительно микроэлектродной решетки с возможностью определения расстояния между
стенкой скважины и каждым отдельным электродом решетки, а импульсы акустической
энергии образуют лучи, размеры поперечного сечения которых соизмеримы с пространственной разрешающей
способностью, обеспечиваемой электродами, при этом дополнительно
направляют первые испытательные акустические импульсы от первого калибро-
вочног;о преобразователя на первую мишень на инструменте, которую располагают
от первого калибровочного преобразователя на расстоянии, исключающем
наложение возбужденных указанным преобразователем импульсов и импульсов,
отраженных от первой мишени, детектируют отраженные от первой мшпени первые
испытательные импульсы, из которых получают калибровочные сигналы,
изменяющиеся в функции глубины, направляют вторые испытательные акустические
импульсы от второго измерительного преобразователя через буровой раствор на мишень на инструменте
, которую располагают от второго измерительного преобразователя на расстоянии, исключающем наложение
возбужр.енных указанным преобразователем импульсов и импульсов,
отраженных от второй мишени, детектируют отраженные второй мишенью вторые
испытательные импульсы, из которых получают сигналы, определяющие скорость
акустической волны в буровом растворе в функции глубины, а величину
зазора между электродами и стен- , кой скважины корректируют с учетом
калибровочных сигналов и сигналов, определяющих скорость акустической волны в буровом растворе.
2. Способ по п. 1, отлича ю- щ и и с я тем, что направляют дополнительные
узконаправленные импульсы акустической энергии из точек инструмента , которые располагают вьш1е
и ниже микроэлектродной решетки, ес0
5
0
5
0
5
0
5
0
5
ли смотреть вдоль направления инструмента
.
3. Устройство для обследования зазора в буровой скважине при исследовании
формаций Земли, проходимой при помощи бурового инструмента, содержащее
узел определения измеряемого параметра , узел определения величины
зазора между инструментом и стенкой скважины и узел автоматической коррекции
величины измеряемого параметра с учетом величины зазора, отличающееся тем, что узел определения
измеряемого параметра выполнен в внце установленной на сегменте
бурового инструмента микрорешетки из множества близких перекрьгоающихся рядов
электродов для измерения удельного сопротивления породы в сплошной
кольцевой зоне стенки скважины с раз- решающей способностью, соответствующей
поперечным размерам электродов, а узел определения величины зазора
выполнен в виде средств для направления импульсов акустической энергии в
направлении стенки буровой скважины, расположенных на буровом инструменте
с возможностью обеспечения определения зазора между соответствующим рядом
электродов микрорешетки- и стенкой скважины, из места расположения
на инструменте, которое имеет известное положение по отношению к положению
микрорешетки, и генерации сигналов отражения, соответствующих определяемым
акустическим отражениям, возникающим под действием импульсов, и средств для генерации из сигналов
отражения сигналов зазора, показывающих величину зазора микрорешетки от
стенки скважины, при этом средства для направления импульсов акустической
энергии в направлении стенки буровой скважины имеют множество акустических
датчиков для определения зазора, которые расположены относительно
микрорешетки на буройом инструменте с возможностью определения
расстояния между стенкой скважины и каждым отдельным электродом микрорешетки
, калибровочный акустический датчик и измерительный акустяческий
датчик скорости акустической волны в буровом растворе, а средства для генерации
из сигналов отражения сигналов зазора имеют узлы, реагирующие
на определяемые акустические отражения , возникающие под действием акус2315
тических импульсов от кзлибрювочного акустического датчика для генерации
акустических калибровочньк сигналов, соответствующих калибровке датчика
для обследования зазора, как функции глубины, узлы, реагирующие на определяемые
акустические отражетния, возникающие под действием акустических
импульсов от измерительного акустического датчика скорости акустической
волны в буровом растворе для генерации калибровочных сигналов, соответствующих
скорости акустической волны в буровом растворе, как функции глубины , и узлы для коррекции величины
сигнала зазора в соответствии с акустическими калибровочными сигналами
и калибрювочными сигналами скорости акустической волны в буровом растворе . .
4.Устройство поп.З, отличающееся тем, что средства для направления мчпульсов акустической
энергии в направлении стенки буровой скважины содержат узлы для определения
момента превъшения сигналами отражения порогового уровня, определяемого шумовыми импульсами, и
узлы, реагирующие на калибровочные сигналы, для уменьщания порогового .
,уровня, когда акустическое отражение не определяют внутри периода
времени, определяемого калибровочными сигналами.
5.Устройство по пп. 3 или 4, отличающееся тем, что калибровочный акустический датчик имеет
конструкцию, подобную конструкции акустического датчика для опр еделе-
ния зазора, и снабжен мишенью в виде отражающей поверхности, обеспечивающей
получение акустических отражений возникающих под действием акустических
импульсов от калибровочного акустического датчика и детектируемых им
6. Устройство по пп. 3, 4 или 5, отличающееся тем, что измерительный акустический датчик скорости
акустической волны в буровом растворе снабжен мищеньк) в виде отражающей поверхности и пазом заданной
1863
24
ширины, который выполнен на буровом инструменте, заполнен буровым раствором
и расположен между акустическим датчиком скорости акустической волны
в буровом растворе и отражающей поверхностью , обеспечивающей получение
акустических отражений, регистрируе- мьк упомянуть датчиком.
7. Устройство по пп. 3-6, отличающееся тем, что каждый из множества акустических датчиков
для определения зазора расположен в поперечно ориентированной относительно
продольной оси бурового инструмента решетке, размещенной со смещением
по вертикали от микроэлектродной ре- щетки с возможностью обеспечения определения
зазора против каждого электрода ,
8.Устройство по п. 7, отличающееся
тем, что акустические датчики для определения зазора расположены вьпие и ниже микроэлектродной
решетки.
9.Устройство по пп. 3-6, отличающееся тем, что акустические
датчики для определения зазора расположены в поперечном относительно
продольной оси бурового инструмента ряду, имеют общую отражающую
поверхность, которая установлена в углублении сегмента бурового инструмента
под углом 45° к его боковой поверхности и к направлению акустичес-
ких пучков датчиков, а ряд акустических датчиков для определения зазора
расположен на расстоянии от отражающей поверхности и от боковой поверхности
бурового инструмента, исключающем наложение возбужденных акустическими
датчиками импульсов и импульсов, отраженных от стенки буровой скважины .
10. Устройство по пп. 7-9, отличающееся тем, что каждый датчик снабжен линией задержки акустических
импульсов, время задержки которой выбрано из условия исключения наложения возбужденных датчиком/
акустических импульсов и отраженных акустических импульсов.
/
20
.11
... 4 т ff ад
01 Ут 99-
HciD
фиг.а
Фиг.}3
531863
27
26
Фиг. J2
Фиг.П
w,
tpueje
ф1/е.15
U
Комментарии