Способ мониторинга двигателя летательного аппарата во время работы в полете - RU2708905C2
Код документа: RU2708905C2
Чертежи




Описание
Область техники
Настоящее изобретение относится к области обслуживания авиационного оборудования.
В частности, оно относится к способу оценки нормальности или ненормальности измеряемого значения физического параметра двигателя.
Уровень техники
Авиационный газотурбинный двигатель может состоять из двух вращающихся частей, которые со временем и в результате эксплуатации указанного газотурбинного двигателя могут оказаться разбалансированными, что проявляется в их фазах вращения. Появляющийся дисбаланс моделируют, в частности, при помощи добавочной массы, виртуально располагаемой в точке, находящейся за пределами оси вращения двух вращающихся частей.
Добавочная масса, называемая в широком смысле противовесом, создает некомпенсированную центробежную силу, которая «вращается» и приводит к некомфортной вибрации, которая может даже представлять угрозу для целостности двигателя, если она является слишком сильной.
Эту проблему можно исправить за счет балансировки двигателя на земле, которая состоит в установке инерционных грузов таким образом, чтобы компенсировать появляющийся дисбаланс при помощи нового противоположного дисбаланса. Речь идет о сложной ручной операции, которая требует соблюдения высокой точности и которую осуществляют во время контрольных осмотров газотурбинного двигателя.
Техническая трудность связана с тем, что в настоящее время не существует возможности заранее определить необходимость балансировки и корректировать качество уже произведенной балансировки. Тревожный «вибрационный» сигнал, передаваемый в кабину экипажа, является единственным индикатором, который позволяет предупредить оператора о необходимости коррекции плохой балансировки.
Иначе говоря, балансировку осуществляют либо систематически во время операций обслуживания, либо после получения тревожного вибрационного сигнала в кабине.
Поэтому существует потребность в надежном, эффективном и воспроизводимом способе мониторинга двигателя, чтобы иметь возможность планировать следующую балансировку или, если балансировка произведена, чтобы оценить ее качество.
Раскрытие изобретения
В качестве первого объекта изобретения предложен способ мониторинга двигателя летательного аппарата во время работы в полете, при этом способ отличается тем, что содержит следующие этапы:
(а) по меньшей мере для одной характеристической частоты работы двигателя при помощи датчика, расположенного в двигателе, измеряют по меньшей мере одно значение синхронного вибрационного уровня на указанной характеристической частоте;
(b) по меньшей мере для одного модуля указанного двигателя при помощи средств обработки данных производят оценку значения дисбаланса указанного модуля в зависимости от измеренного значения или измеренных значений вибрационного уровня и от по меньшей мере одного коэффициента чувствительности указанного модуля, связанного с указанной характеристической частотой;
(c) при помощи средств обработки данных производят оценку запаса балансировки указанного модуля в зависимости от значения дисбаланса указанного модуля и от связанного с модулем максимального порога;
(d) производят оценку числа полетов указанного летательного аппарата, оставшихся до балансировки, и/или индикатора качества предыдущей балансировки в зависимости от оценочного значения или оценочных значений запаса балансировки и от данных, характеризующих прошлые балансировки двигателя и записанных в базе данных, хранящейся в средствах записи данных, и передают их в интерфейсные средства.
Согласно другим предпочтительным и не ограничительным отличительным признакам:
- этап (а) включает в себя предварительное измерение при помощи датчика, расположенного в двигателе, по меньшей мере одной характеристической частоты работы двигателя;
- указанный двигатель является по меньшей мере двухкорпусным двигателем, имеющим по меньшей мере две характеристические частоты, в том числе частоту низкого давления (НД) и частоту высокого давления (ВД), при этом каждая балансировка является балансировкой низкого давления и/или балансировкой высокого давления;
- частота НД является частотой вращения узла низкого давления двигателя, и частота ВД является частотой вращения узла высокого давления двигателя;
- каждый модуль двигателя связан с узлом высокого давления или с узлом низкого давления, и его выбирают среди вентилятора, по меньшей мере одной турбины и по меньшей мере одного компрессора;
- каждая прошлая балансировка связана со значением установленного противовеса и с временным параметром;
- указанный полет указанного летательного аппарата содержит последовательность фаз работы указанного двигателя, при этом каждая фаза работы имеет для каждой характеристической частоты номинальное значение и/или номинальную производную характеристической частоты, при этом этап (а) включает в себя измерение по меньшей мере одного значения вибрационного уровня указанного двигателя по меньшей мере для одной из указанных фаз работы, при этом измерение производят в момент указанной фазы работы, в который характеристическая частота имеет моментальные значение и/или производную, по существу равные соответственно номинальному значению и номинальной производной характеристической частоты, соответствующим фазе работы;
- указанное значение вибрационного уровня указанного синхронного модуля на указанной характеристической частоте соответствует амплитуде указанной характеристической частоты в частотном спектре вибрации двигателя;
- этап (b) включает в себя следующие подэтапы:
- для каждой характеристической частоты производят оценку пропорции дисбаланса модуля на характеристической частоте в зависимости от значений измеренных вибрационных уровней;
- для каждой характеристической частоты производят оценку вибрационного уровня синхронного модуля на характеристической частоте;
- для каждой характеристической частоты производят оценку уровня дисбаланса модуля, связанного с характеристической частотой;
- производят оценку значения дисбаланса.
- согласно способу:
- вибрационный уровень синхронного модуля на характеристической частоте оценивают как произведение измеренного синхронного вибрационного уровня на характеристической частоте и оценочной пропорции дисбаланса указанного синхронного модуля на характеристической частоте:
- уровень дисбаланса, связанный с характеристической частотой, оценивают как отношение вибрационного уровня указанного синхронного модуля на характеристической частоте к коэффициенту чувствительности указанного синхронного модуля на характеристической частоте;
- значение дисбаланса оценивают как среднее значение уровней дисбаланса указанного модуля, связанных с каждой из характеристических частот.
Вторым объектом изобретения является устройство мониторинга двигателя во время работы в полете, содержащее средства обработки данных, средства записи данных, хранящие в базе данных данные, характеризующие прошлые балансировки двигателя, и интерфейсные средства, при этом устройство отличается тем, что средства обработки данных выполнены с возможностью:
- по меньшей мере для одной характеристической частоты работы двигателя принимать от датчика, расположенного в двигателе, по меньшей мере одно значение синхронного вибрационного уровня на указанной характеристической частоте;
- по меньшей мере для одного модуля указанного двигателя оценивать значение дисбаланса указанного модуля в зависимости от измеренного значения или измеренных значений вибрационного уровня и по меньшей мере от одного коэффициента чувствительности указанного модуля, связанного с указанной характеристической частотой;
- оценивать запас балансировки указанного модуля в зависимости от значения дисбаланса указанного модуля и от связанного с модулем максимального порога;
- оценивать число полетов указанного летательного аппарата, оставшихся до балансировки, и/или качество предыдущей балансировки в зависимости от оценочного запаса или оценочных запасов балансировки и от данных, характеризующих прошлые балансировки двигателя, записанных в базе данных, хранящейся в средствах записи данных;
- передавать результат в интерфейсные средства.
Третьим объектом изобретения является система, содержащая:
- двигатель летательного аппарата, оснащенный датчиком для измерения по меньшей мере одного значения синхронного вибрационного уровня на характеристической частоте двигателя;
- заявленное устройство мониторинга двигателя летательного аппарата во время работы в полете.
Четвертым и пятым объектами изобретения являются компьютерный программный продукт, содержащий командные коды для осуществления заявленного способа мониторинга двигателя летательного аппарата во время работы в полете, когда указанную программу исполняет компьютер; и средство записи, считываемое информативным устройством, на котором компьютерный программный продукт содержит командные коды для осуществления заявленного способа мониторинга двигателя летательного аппарата во время работы в полете.
Краткое описание чертежей
Другие признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания предпочтительного варианта осуществления изобретения. Это описание представлено со ссылками на прилагаемые чертежи, на которых:
фиг. 1 - пример окружающей среды, в которой осуществляют заявленный способ;
фиг. 2 - пример кривой значений дисбаланса, полученных при помощи заявленного способа;
фиг. 3 - кривые чувствительности к вибрациям, показывающие значение коэффициентов чувствительности для разных вариантов использования летательного аппарата;
фиг. 4а-4b - дополнительные кривые, полученные при помощи предпочтительного варианта осуществления заявленного способа.
Подробное описание
Как показано на фиг. 1, настоящий способ является способом мониторинга двигателя 1 летательного аппарата 2 во время работы в полете.
Под мониторингом следует понимать оценку уровня дисбаланса двигателя 1, позволяющую планировать очередную балансировку двигателя 1. Предпочтительно речь идет о мониторинге «в псевдо-реальном времени»: двигатель 1 оснащен датчиками 20 (которые, как будет показано ниже, контролируют дисбаланс в рабочем режиме или на рабочей частоте данного двигателя), активными во время полета летательного аппарата 2. Этот летательный аппарат регулярно направляет на землю небольшие сообщения (моментальные или с задержкой во времени), содержащие значения измерений, поступающие от датчиков 20. Эти сообщения направляются через средства передачи, например, через спутник 35 (в частности, по протоколу ACARS), и устройство 3, находящееся на земле и содержащее средства 31 обработки данных (например, процессор) и средства 32 хранения данных (например, жесткий диск), принимает данные, содержащиеся в этих сообщениях, через базовую станцию 34 и обрабатывает их для осуществления способа.
Специалисту в данной области понятно, что не существует ограничений, связанных с процедурой передачи измерений в устройство 3 (например, измерения можно хранить на летательном аппарате 2 в течение полета и затем передать в виде блока в устройство 3 после посадки). Кроме того, обработка может происходить с задержкой во времени. Можно также предусмотреть, чтобы устройство 3 находилась на летательном аппарате 2.
Устройство 3 (или другое устройство) оснащено интерфейсными средствами 33 (такими как клавиатура и экран) для взаимодействия с пользователем системы или с другим устройством и, в частности, для отображения результатов (см. ниже).
Как правило, двигатель 1 представляет собой или является частью газотурбинной установки, в частности, двухконтурного газотурбинного двигателя. Как будет показано ниже, предпочтительно настоящий двигатель 1 является по меньшей мере двухкорпусным (и даже трехкорпусным) двигателем, то есть содержит узел высокого давления (ВД) и узел низкого давления (НД), каждый из которых имеет разные частоты вращения (каждый узел ВД/НД состоит из турбины ВД/НД и из компрессора ВД/НД, связанных через ротор). Как правило, роторы каждого из узлов расположены один в другом для обеспечения этого разделения. Двигатель 1 содержит «основные модули», то есть основные компоненты, каждый из которых вращается, когда двигатель 1 работает, поэтому они могут стать причиной проблемы балансировки. Как правило, количество этих модулей равно пяти в случае двухкорпусного двигателя 1: вентилятор (который входит в состав узла НД), компрессор НД, компрессор ВД, турбина ВД и турбина НД. Двигатель может содержать больше (или меньше) пар компрессор/турбина.
Частоты вращения, соответствующие каждому узлу НД/ВД (выраженные в количестве оборотов за единицу времени), являются характеристическими частотами двигателя 1, поскольку любая вибрация двигателя по причине дисбаланса возникает на частоте, зависящей по меньшей мере от одной из этих частот вращения.
Эти частоты определяют два режима двигателя, называемые N1 и N2, соответственно НД и ВД. В частности, в режиме N1 характеристическая частота двигателя 1 является частотой вращения узла НД, и в режиме N2 характеристическая частота двигателя 1 является частотой вращения узла ВД. Понятно, что каждый основной модуль двигателя связан с одной из характеристических частот, которая является частотой, с которой вращается этот модуль. В дальнейшем тексте настоящего описания будет рассмотрен пример двух характеристических частот (частота НД и частота ВД) и, следовательно, двух классов модулей (модули НД и ВД), но их может быть и больше, так как существуют, например, трехкорпусные двигатели. Как правило, каждая характеристическая частота соответствует одному режиму двигателя. Как будет показано ниже, один или несколько датчиков 20 могут быть специально предназначены для определения характеристических частот двигателя.
Понятно, что во всех случаях значения этих характеристических частот двигателя 1 не являются постоянными и естественным образом зависят от условий работы двигателя, в частности, от фаз работы двигателя 1.
Действительно, полет летательного аппарата 2 всегда включает в себя повторяющуюся последовательность фаз полета, которыми обычно являются руление на вылете “Taxi-out” (перемещение самолета на земле перед взлетом), взлет, набор высоты, как правило, полет на крейсерской скорости (если полет является достаточно длительным), снижение и руление на прилете “Taxi-in” (перемещение самолета на земле после приземления).
Каждая из этих фаз является либо «устоявшейся» (как правило, при полете на крейсерской скорости или при рулении) и характеризуется стабильным режимом, то есть характеристическая частота или характеристические частоты двигателя 1 являются по существу постоянными (производная является по существу нулевой), либо «переходной» (как правило, при взлете, наборе высоты и снижении) и характеризуется увеличивающимися или уменьшающимися характеристическими частотами двигателя 1 (производные с по существу высоким и постоянным абсолютным значением).
Таким образом, каждая фаза работы связана для каждой характеристической частоты с номинальным значением и/или с номинальной производной характеристической частоты. Они могут храниться в базе данных в средствах 32. Следует отметить, что в переходных фазах значение характеристической частоты не является постоянным, и в этом случае номинальное значение может быть, например, установленным для фазы средним значением.
Понятно, что в целом все описательные данные характеристических частот по каждой фазе можно получить посредством статистического анализа большого числа полетов на одной модели двигателя 1.
Способ мониторинга
Настоящий способ включает в себя две большие группы этапов (а)-(с) и (d). Первая группа этапов (а)-(с) служит, чтобы получать для модуля (и предпочтительно для каждого модуля) индикатор, называемый «запасом балансировки» модуля, который позволяет убедиться, что двигатель можно продолжать эксплуатировать, и если он остается в эксплуатационном состоянии, оценить число полетов, которые можно осуществить перед повторной балансировкой двигателя. Как будет показано ниже, как правило, запас балансировки является однородной величиной при значении дисбаланса, которое можно считать допустимым при повышении дисбаланса до появления тревожного сигнала. Иначе говоря:
- если запас балансировки является высоким, это значит, что вибрации являются очень слабыми и что можно еще допустить повышение дисбаланса, прежде чем понадобится балансировка; и
- если запас балансировки приближается к нулю, это значит, что дисбаланс уже является критическим и что неизбежно появление тревожного вибрационного сигнала (то есть необходима балансировка).
Использование этого индикатора, вычисление которого будет пояснено ниже, обеспечивает объективное и воспроизводимое отслеживание появления дисбаланса в двигателе.
Последний этап (d) является этапом использования оценочного или оценочных значений запаса балансировки и данных, характеризующих прошлые балансировки двигателя 1 (в данном случае имеется в виду настоящий двигатель и другие двигатели той же модели двигателя) и записанных в базе данных, хранящейся в средствах 32 хранения данных, для того чтобы либо оценить число полетов летательного аппарата до того, как понадобится новая балансировка, либо оценить качество предыдущей балансировки (в частности, балансировки, которая была произведена накануне, то есть перед текущим полетом). Ниже будет показано, как можно альтернативно получить эти два результата. Понятно, что существуют и другие случаи использования полученных данных.
Данные, характеризующие прошлые балансировки и хранящиеся в базе данных, можно рассматривать как контекстные данные. В частности, база данных содержит многочисленные оценки запасов балансировки летательных аппаратов 2, оснащенных одинаковыми двигателями 1 (имеющими одинаковые модули, работающие в одинаковых условиях), а также соответствующие соотношения балансировок и может быть использована как база обучения.
Таким образом, получают множество графиков типа графика, представленного на фиг. 2 и показывающего для модуля данного двигателя 1 изменение максимального дисбаланса в зависимости от числа полетов (в данном случае речь идет об графическом отображении запаса балансировки, определенного как разность между значением дисбаланса и соответствующим максимальным порогом).
В этом примере можно отметить, что балансировка (в данном случае произведенная корректно) происходит между двенадцатым и тринадцатым полетами. Таким образом, каждая прошлая балансировка связана в базе данных со значением установленного противовеса (то есть с «поправочным» противовесом, предназначенным для компенсации появившегося или существующего дисбаланса) и с временным параметром, в частности, с параметром, относящимся к последовательности полетов и позволяющим узнать, между какими полетами (и, следовательно, после какого числа полетов) и/или после какого числа полетных часов была осуществлена балансировка.
В случае двухкорпусного двигателя каждая балансировка является балансировкой низкого давления и/или балансировкой высокого давления, что тоже отражено в базе данных.
Сбор измерений синхронной вибрации
Фаза оценки запаса балансировки для модуля двигателя 1 начинается с первого этапа (а) измерения датчиком 20, для по меньшей мере одной характеристической частоты работы двигателя 1 (предпочтительно для каждой из характеристических частот работы двигателя 1), по меньшей мере одного значения уровня вибрации указанного модуля, синхронной с указанной характеристической частотой двигателя. Эти «уровни синхронной вибрации» синхронизированы с характеристической частотой двигателя. Следует отметить, что характеристическая частота или характеристические частоты двигателя 1 могут быть получены посредством предварительного измерения, см. ниже.
Указанный датчик 20 является датчиком, который встроен в двигатель 1 (понятно, что предпочтительно в двигателе 1 в разных местах установлено несколько датчиков 20) и, в случае необходимости, может передавать данные в реальном времени в блок обработки, как правило, находящийся на летательном аппарате (для немедленного или последующего (например, на земле) использования результатов). Известны многие датчики, способные измерять вибрации, как правило, выдающие значения ускорения, скорости и/или перемещения двигателя 1. Выдаваемые значения подвергаются обработке (непосредственно датчиком 20 или в удаленном устройстве) посредством спектрального анализа, например, с применением алгоритмов Фурье, чтобы получить измерение частотного спектра, характерного для вибраций двигателя. Спектр вибрации является совокупностью данных по уровням и частотам чистых вибраций, составляющих эту вибрацию. Возможное первое интегрирование позволяет получить скорость вибрации на основании ускорения, и возможное второе интегрирование позволяет получить перемещение на основании скорости.
В рамках настоящего способа предпочтение отдается значениям скорости вибрации. Таким образом, в полученном спектре амплитуда спектральной линии указывает на максимальную скорость вибрации, полученную на соответствующей частоте. Если необходимо получить значение уровня вибрации указанного двигателя 1, синхронной с указанной характеристической частотой, то достаточно выбрать линию спектра на этой характеристической частоте и взять амплитуду этой линии (или усреднить узкую частотную полосу, центрованную по характеристической частоте). Предпочтительно получают вибрационный уровень на частоте НД и вибрационный уровень на частоте ВД.
Следует отметить, что это измерение предпочтительно производят один раз за фазу полета (руление на вылете, взлет и т.д.). Поскольку, как было указано выше, каждая фаза работы связана для каждой характеристической частоты с номинальным значением и/или с номинальной производной характеристической частоты, достаточно установить интервалы вокруг номинальных значений, совпадающие с рассматриваемой фазой, и выбрать момент работы, совместимый с этими интервалами, чтобы получить измерение (или измерения) искомого уровня синхронной вибрации. Определение вибрационных уровней можно обусловить также поддержанием режима N1 или режима N2 (то есть частот НД и ВД) в течение заданного времени подтверждения.
Измерения вибрационных уровней по каждой фазе можно комбинировать, чтобы получить вибрационный уровень полета (опять же по каждой характеристической частоте), например, рассматривая максимум за полет, или посредством линейной комбинации различных вибрационных уровней по каждой фазе.
Предпочтительно, как было указано выше, этап (а) содержит предварительное измерение другим датчиком 20, находящимся в двигателе 1, по меньшей мере одной характеристической частоты работы двигателя 1, то есть режимов в стабилизированных точках работы (в которых режим почти не меняется). В частности, может быть один датчик, предназначенный для группы модулей (то есть датчик для узла ВД и датчик для узла НД), как правило, тахометр, измеряющий скорость вращения узла: число оборотов узла за единицу времени определяет характеристическую частоту.
Как правило, эти датчики 20 для измерения характеристических частот расположены в передней части двигателя 1 и могут быть вынесены относительно ротора. Предпочтительно датчик для узла НД (называемый датчиком N1) находится на уровне вентилятора, и датчик для узла ВД (называемый датчиком N1) находится в коробке AGB (“Accessory GearBox” или коробка приводов агрегатов) в классических архитектурах.
Обработка данных
На втором этапе (b) средства 31 обработки данных оценивают значение дисбаланса (выраженное как масса на заданном расстоянии от оси вращения, в г.см на фиг. 2) по меньшей мере для одного модуля двигателя 1 (предпочтительно для каждого модуля двигателя 1) в зависимости от измеренных значений вибрационного уровня и по меньшей мере от одного коэффициента чувствительности, связанного с характеристической частотой и с модулем.
Предпочтительно коэффициент чувствительности определен для каждого модуля, для каждого режима и для каждого датчика 20 (как правило, перемещение в 1 мил-da для модуля НД, так как режим модуля Нд является более низким и, следовательно менее зашумленным, поэтому можно рассматривать перемещение, и, как правило, скорость в 1 дюйм в секунду-pk для модуля ВД, так как перемещение является более зашумленным, и предпочтительнее, например, использовать скорость).
Таким образом, коэффициенты чувствительности являются заранее определенными безразмерными параметрами алгоритма, которые отражают влияние вибраций на людей или на предметы, транспортируемые летательным аппаратом 2 (пилот, пассажиры и/или груз).
Повышенный коэффициент чувствительности показывает, что в соответствующем режиме работы вибрации модуля создают весьма ощутимый дисбаланс, тогда как, наоборот, низкий коэффициент чувствительности значит, что такие же вибрации модуля создают лишь ограниченное неудобство.
В случае необходимости, коэффициенты можно определять путем обучения, но предпочтительно их вычисляют в зависимости от варианта использования летательного аппарата 2 (то есть, от того, кого или что он транспортирует) и от уровня требований пользователя (то есть оператора летательного аппарата).
Действительно, понятно, что пассажиры, пилоты или груз по-разному воспринимают вибрации. Точно так же, уровень допустимых вибраций может зависеть от типа предоставляемой услуги, то есть от выбора приоритетности качества полета или его рентабельности. Действительно, экспериментально получают разные кривые чувствительности к вибрациям типа кривых, показанных на фиг. 3, которые показывают элементарные коэффициенты чувствительности, связанные с каждым из вариантов использования двигателя (пилот/пассажиры/груз), в зависимости от комфортного положения пользователя.
Таким образом, предпочтительно способ содержит предварительное определение коэффициентов чувствительности для применения на этапе (b) в зависимости от условий полета, от варианта использования и от пользователя, при помощи моделей, статистически построенных на основании базы данных, связанных с полетами летательного аппарата 2.
Действительно, отмечается, что каждый среди пилота/пассажиров/груза может быть более чувствительным к вибрациям и к шуму во время некоторых фаз работы двигателя, то есть при разных режимах и под влиянием различных модулей. В частности:
- пилоты показывают повышенную чувствительность при взлете и при приземлении, так как на этих фазах они должны быть наиболее сконцентрированными;
- пассажиры показывают повышенную чувствительность в фазе снижения, так как она является менее комфортной по причине непривычных для организма ускорений, и во время фазы полета на крейсерской скорости, так как она является длительной;
- груз показывает повышенную чувствительность при взлете, так как именно в этот момент транспортируемые предметы могут быть повреждены по причине резкого ускорения.
Эти фазы, на которых чувствительность является повышенной, называются критическими фазами режима работы.
Так, можно заранее определить элементарные показатели α, каждый из которых соответствует варианту использования (как правило, существуют три типа пользователя - пассажиры, пилот и/или груз) и фазе полета и которые связаны с весовыми коэффициентами в зависимости от значений времени, относящихся к критическим фазам для каждого режима работы за весь полет, чтобы получить коэффициенты чувствительности для полета.
В частности, каждый коэффициент чувствительности вычисляют, например, для каждой фазы полета при помощи формулы



при этом весовой коэффициент составляет от 0 до 1 в зависимости от критичности фазы. Оценку элементарных показателей α осуществляет пользователь таким образом, чтобы они характеризовали использование его летательного аппарата 2 и необходимые требования комфорта, и настоящий алгоритм вычисляет соответствующие оптимальные коэффициенты чувствительности, которые в дальнейшем позволяют определить переносимость дисбаланса и составить план балансировки, соответствующий этому использованию и этим требованиям комфорта.
Вычисление значения дисбаланса для модуля на этапе (b) предпочтительно содержит четыре подэтапа:
- производят оценку доли дисбаланса на каждой характеристической частоте в измеренных вибрационных уровнях. Моделируют теоретический вибрационный уровень, используя доли дисбалансов участвующих модулей и коэффициенты чувствительности, соответствующие вибрационной частоте. На основании значения измеренного уровня вибрации выводят ближайший теоретический уровень, сканируя доли дисбалансов каждого модуля. Выбирают долю дисбаланса, которая образует теоретический уровень вибрации, наиболее близкий к измеренному уровню вибрации;
- производят оценку уровня вибрации модуля, синхронной с характеристической частотой как произведение измеренного уровня вибрации, синхронной с характеристической частотой и оценочной доли дисбаланса указанного модуля, синхронного с характеристической частотой;
- производят оценку дисбаланса модуля, связанного с каждой характеристической частотой, как отношение уровня вибрации указанного модуля, синхронного на характеристической частоте, к коэффициенту чувствительности указанного модуля, синхронного с характеристической частотой;
- производят оценку значения дисбаланса как средней величины уровней дисбаланса указанного модуля на всех характеристических частотах.
Иначе говоря, в предпочтительном случае двух режимов НД и ВД сначала каждый модуль связывают либо с дисбалансом НД, либо с дисбалансом ВД. На основании измерений вибрационных уровней оценивают доли дисбаланса для каждого модуля: в измерениях вибрационных уровней, синхронных с частотой НД - доли дисбаланса модулей НД, и в измерениях вибрационных уровней, синхронных с частотой ВД - доли дисбаланса модулей ВД.
Затем оценивают вибрационные уровни, связанные с каждым модулем НД (соответственно ВД), как произведение измерений вибрационного уровня, синхронного с частотой НД (соответственно ВД), и доли дисбаланса этого модуля.
После этого оценивают уровни дисбаланса, связанные с каждым модулем НД (соответственно ВД), как отношение вибрационных уровней, связанных с каждым модулем НД (соответственно ВД), и коэффициента чувствительности НД (соответственно ВД).
Наконец, выводят значение дисбаланса для каждого модуля двигателя 1 как среднюю величину уровней дисбаланса (вычисленных на нескольких характеристических частотах), связанных с этим модулем.
Таким образом, очень просто получают одно значение дисбаланса на всех фазах полета.
На третьем этапе (с) средства 31 обработки данных оценивают запас балансировки указанного модуля в зависимости от значения дисбаланса указанного модуля и от максимального порога, связанного с этим модулем (параметры порога задает оператор обслуживания, и он по умолчанию соответствует порогу передачи тревожной сигнализации о вибрации в кабину экипажа). На практике определяют разность между значением дисбаланса и порогом, как показано на фиг. 2 для восьмого полета.
Если значение дисбаланса превышает порог, значит необходимо экстренно осуществлять балансировку модуля.
Использование данных
Согласно первому варианту осуществления изобретения, на этапе (d) производят оценку качества предыдущей балансировки в зависимости от указанных оценочных запасов балансировки и данных, характеризующих прошлые балансировки и хранящихся в базе данных.
Действие балансировки оценивают по индикатору качества, который для каждого модуля измеряет (например, в процентном выражении) уровень дисбаланса/запас балансировки, достигнутый после балансировки, относительно целевого уровня.
Например, для этого вычисляют изменение запаса балансировки (по абсолютной или относительной величине) во время балансировки. Например, на графике на фиг. 2 показано уменьшение значения дисбаланса с 3.75 до 0.75 г.см, то есть увеличение запаса балансировки с 0.25 до 3.25 (умноженного на одиннадцать), что свидетельствует об успешной и качественной балансировке. Чем ближе запас балансировки к порогу (то есть чем ближе к нулю остаточный дисбаланс после балансировки), тем лучше балансировка.
Качество определяют как удовлетворительное или не удовлетворительное путем сравнения индикатора качества с индикаторами качества прошлых балансировок, данные по которым записаны в указанной базе.
В случае, когда восстановление запаса балансировки перестает быть удовлетворительным (повышенный уровень дисбаланса после операции балансировки), необходимо как можно раньше запустить дополнительную операцию обслуживания, чтобы избежать передачи тревожной сигнализации о вибрации в кабину экипажа. При этом ставится задача обеспечения наилучшего сервиса и достижения максимально высокого уровня безопасности.
Согласно второму варианту осуществления изобретения, на этапе (d) производят оценку числа полетов указанного летательного аппарата 2 до балансировки в зависимости от указанных оценочных запасов балансировки и данных, характеризующих прошлые балансировки и хранящихся в базе данных.
Так, при помощи запаса балансировки модуля можно вычислить тенденцию или произвести экстраполяцию (линейную, полиномиальную, сплайновую и т.д.) на данных из базы данных, чтобы оценить число полетов или число полетных часов, которые можно выполнить, прежде чем возникнет необходимость в новой балансировке.
Это решение позволяет сделать прогноз для двигателя 1 о времени между двумя последовательными балансировками и построить индикатор частотности балансировки внутри парка двигателей 1, что позволяет оптимизировать стратегию обслуживания, связанную с этой операцией.
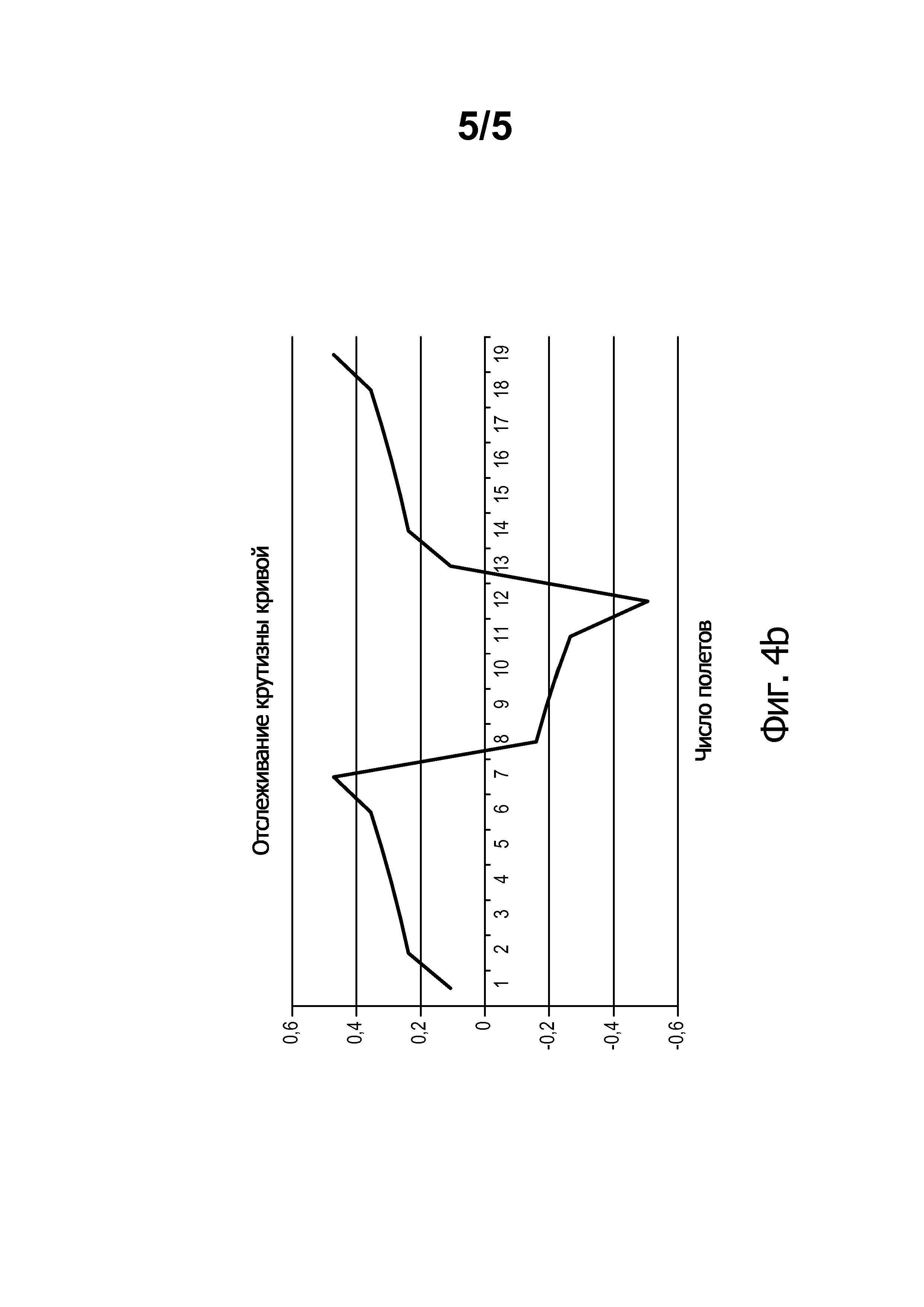
Предпочтительно можно построить индикатор тенденции, основанный на крутизне кривой, полученной в результате линейной регрессии, усредненной по конфигурируемому числу полетных часов или полетов.
Например, на фиг. 4а показан результат вычисления линейной регрессии в скользящем окне из пяти полетов на основании графика, показанного на фиг. 2, а на фиг. 4b показана производная кривой, представленной на фиг. 4а.
Во всех случаях эксперты могут визуально наблюдать полученные результаты (оценка числа полетов указанного летательного аппарата 2, оставшихся до балансировки, и/или индикатора качества предыдущей балансировки) через интерфейсные средства 33 для обеспечения их анализа и их отслеживания.
Предпочтительно эти данные служат также для пополнения базы 32 данных балансировки.
Устройство и система
Устройство 3 (показано на фиг. 1) для осуществления описанного выше способа (мониторинг двигателя 1 летательного аппарата 2 во время работы в полете) содержит средства 31 обработки данных, средства 32 хранения данных и интерфейсные средства 33.
Средства 32 хранения данных содержат в базе данных данные, характеризующие прошлые балансировки.
Средства 31 обработки данных выполнены с возможностью:
- по меньшей мере для одной характеристической частоты работы двигателя 1 принимать от датчика 20, расположенного в двигателе 1, по меньшей мере одно значение уровня вибрации, синхронной с указанной характеристической частотой;
- по меньшей мере для одного модуля двигателя 1 оценивать значение дисбаланса указанного модуля в зависимости от указанных измеренных значений вибрационного уровня и от по меньшей мере одного коэффициента чувствительности указанного модуля, связанного с указанной характеристической частотой;
- оценивать запас балансировки указанного модуля в зависимости от значения дисбаланса указанного модуля и от связанного с модулем максимального порога;
- оценивать оставшееся число полетов указанного летательного аппарата 2 до балансировки и/или качество предыдущей балансировки в зависимости от указанных оценочного запаса балансировки и от данных, характеризующих прошлые балансировки и записанных в базе данных, хранящейся в средствах 32 хранения данных;
- передавать результат в интерфейсные средства 33.
Как было указано выше, устройство 3 предпочтительно входит в состав системы, дополнительно содержащей двигатель 1 летательного аппарата 2, оснащенный датчиком 20, измеряющим уровень синхронной вибрации или уровни синхронных вибраций.
Компьютерный программный продукт
Четвертым и пятым объектами изобретения являются компьютерный программный продукт, содержащий командные коды для осуществления (на средствах 31 обработки данных, в частности, принадлежащих к устройству 3) заявленного способа мониторинга двигателя 1 летательного аппарата 2 во время работы в полете, а также средства хранения информации, считываемые компьютерным устройством (например, средства 32 хранения данных этого устройства 3), на которых записан этот компьютерный программный продукт.
Реферат
Изобретение относится к способу мониторинга двигателя летательного аппарата в полете. Способ содержит следующие этапы: по меньшей мере для одной характеристической частоты работы двигателя измеряют по меньшей мере одно значение уровня синхронной вибрации, по меньшей мере для одного модуля указанного двигателя производят оценку значения дисбаланса указанного модуля в зависимости от измеренного значения или измеренных значений уровня вибрации и от по меньшей мере одного коэффициента чувствительности. Далее производят оценку запаса балансировки указанного модуля в зависимости от значения дисбаланса указанного модуля и от максимального порога, производят оценку числа полетов указанного летательного аппарата, оставшихся до балансировки, и/или индикатора качества предыдущей балансировки в зависимости от оценочного значения или оценочных значений запаса балансировки и от данных, характеризующих прошлые балансировки двигателя. Технический результат заключается в возможности планирования сроков проведения очередной балансировки и оценки качества уже проведенной балансировки. 4 н. и 9 з.п. ф-лы, 5 ил.
Комментарии