Способ и устройство для управления вертикально или горизонтально перемещаемыми воротами с защитой плоскости закрывания ворот от помех - RU2467143C2
Код документа: RU2467143C2
Чертежи






Описание
Изобретение относится к способу и устройству для защиты плоскости закрывания ворот или к другому закрывающему элементу, закрывающему проем за счет перемещения в вертикальной или горизонтальной плоскости.
Общеизвестно, что при автоматически работающих воротах или дверях необходимо принимать меры предосторожности с тем, чтобы объекты, могущие служить помехой, или люди не попали под движущуюся замыкающую кромку ворот и не были повреждены или ранены.
С этой целью на ударных кромках автоматически работающих ворот или дверей, как известно, устанавливаются контактные предохранители кромок, которые при возникновении противодействия (обнаружении препятствия) останавливают привод ворот или дверей или даже вызывают «свободное движение» в смысле изменения направления движения на обратное.
Другое известное решение, обеспечивающее эту защиту, состоит в том, что впритык с плоскостью закрывания ворот впереди и позади них устанавливаются фоторелейные барьеры или защитные фоторелейные завесы, состоящие из множества фоторелейных барьеров, и тем самым по обе стороны кромки ворот создается защитная световая завеса.
Создание для этого весьма предпочтительной системы, причем предусматривается последовательное исключение определенных фоторелейных барьеров, следствием чего является возможность оперирования только одной защитной фоторелейной завесой внутри самой плоскости закрывания ворот, описано в ЕР 0902158.
Другая возможность защиты заключается в том, что над проемом ворот или дверей устанавливаются датчики, создающие перед самой плоскостью закрывания ворот безопасное поле, которое достает до земли и в пространстве может распространяться даже по глубине. Здесь используются инфракрасные или ультразвуковые, а также радарные датчики.
Другая возможность состоит в организации обнаружения уже в предполье проема ворот и, таким образом, в распознании приближения объектов или людей. Надежный предпочтительный метод для этого описан в ЕР 1470314.
Недостаток тактильных систем, т.е. систем, срабатывающих при соприкосновении с объектом, заключается в том, что во всех случаях дело доходит до соприкосновения, прежде чем датчик вызовет остановку или реверсирование направления движения привода ворот. В результате при известных обстоятельствах могут иметь место по меньшей мере легкие ранения или повреждения.
Решения с защитными фоторелейными барьерами и завесами имеют тот недостаток, что в результате воздействий постороннего света, загрязнений или неточного монтажа происходят сбои. Конструктивные затраты велики, если учесть тот факт, что установлены должны быть по меньшей мере два компонента системы, а именно передатчик и приемник системы защитной фоторелейной завесы. Если исходить из монтажа защитных фоторелейных завес перед рамой ворот/дверной рамой или за ней, то, следовательно, необходимо четыре компонента. Кроме того, при таком решении остается незащищенная область перед кромкой двери.
Решение, описанное в ЕР 1470314, нацелено на защиту предполья (зона перед воротами) и может быть сопряжено с большими затратами. В зависимости от установки перед плоскостью закрывания ворот появляются пробелы, которые могут быть перекрыты только с помощью двух систем датчиков. Защита плоскости закрывания ворот не является первоочередной целью, и плоскость закрывания ворот, соответственно, перекрывается неплоскостно.
Задачей изобретения является создание способа с признаками ограничительной части пункта 1 формулы изобретения, причем предотвращаются высокие технические затраты, необходимые при установке передатчиков и приемников сравнительно большого количества фоторелейных барьеров для создания защитной фоторелейной завесы в плоскости закрывания ворот, а также устраняются недостатки, которые, возможно, могли бы возникнуть при прохождении полотна ворот в соответствующих направляющих средствах мимо передатчиков и приемников, а также непосредственно перед приемными поверхностями передатчиков и приемников.
Эта задача согласно изобретению решается с помощью отличительных признаков пункта 1 формулы изобретения.
Изобретение относится также к осуществлению способа согласно п.1 формулы изобретения. Предпочтительные и усовершенствованные варианты выполнения являются предметом зависимых пунктов, касающихся способа и устройства.
Согласно одному предпочтительному варианту выполнения устройства для осуществления указанного здесь способа дальномерный детектор, формирующий луч дальномерного детектора, представляет собой лазерный сканнер, направляющий узко сфокусированный луч света на идущую впереди кромку ворот и на боковое ограничение проема ворот, причем возникают сравнительно небольшие затруднения с тем, чтобы сфокусировать сканирующий луч настолько узко (резко), чтобы он в пределах допуска, обусловленных эксплуатацией ворот, надежно падал на идущую впереди кромку ворот и чтобы отраженный сигнал дальномерного детектора мог быть использован для оценки измерения времени его прохождения с высокой степенью точности.
Здесь следует упомянуть о том, что в последующем описании и в пунктах формулы изобретения в качестве контролируемого и управляемого закрывающего элемента обсуждаются ворота, которые в положение закрытия преимущественно перемещаются в вертикальном направлении. Однако изобретение включает в себя также горизонтально подвижные ворота, решетчатые заграждения, монтажные перекрытия, перекрытия бассейнов, запорные элементы погрузочных люков грузовых судов и т.п.
Ниже изобретение более подробно поясняется на примерах выполнения со ссылкой на приложенные чертежи, на которых:
фиг.1 - схематический вид в перспективе вертикально перемещаемых в положения открытия или закрытия сегментарных жалюзийных ворот для осуществления приведенного здесь способа;
фиг.2 - схематически вертикально перемещаемые ворота для определения геометрических размеров;
фиг.3 - диаграмма с характеристиками для пояснения предельных величин, получаемых согласно изобретению, для сравнения с величинами измерения дальности дальномерным детектором приведенного здесь устройства;
фиг.4 - схематический вариант выполнения идущей впереди кромки ворот для улучшения ее отражательных свойств;
фиг.5-8 - схематические виды систем ворот или дверных систем, к которым применены указанные здесь меры управления соответствующими закрывающими элементами, и
фиг.9 - трехмерная диаграмма для пояснения определения предельных величин с помощью дальномерного детектора.
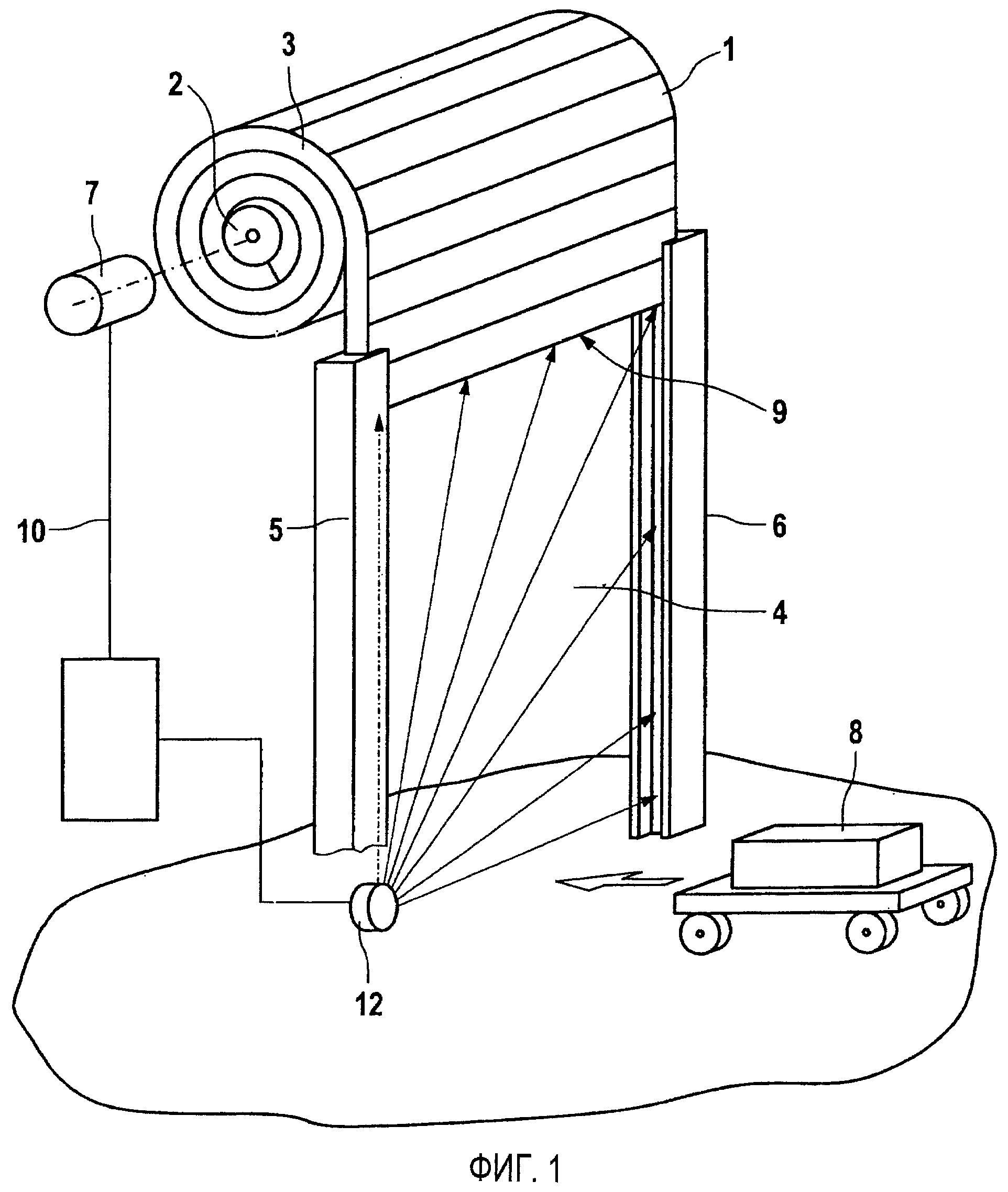
На фиг.1 схематически в перспективе изображены сегментарные жалюзийные ворота 1, которые для закрытия проема 4 ворот могут опускаться вниз с намотанного на вал 2 сматывателя 3 между боковыми направляющими 5 и 6, для чего вал 2 соответствующим образом вращается с помощью привода 7. Путем реверсирования привода 7 ворота 1, наоборот, могут быть подняты для освобождения проема 4 ворот между направляющими 5 и 6.
Если при закрывании сегментарных ворот 1 в направлении проема 4 ворот движется препятствующий объект 8, то движение в направлении ворот 1 должно быть закончено путем остановки привода 7 или при необходимости путем реверсирования привода 7 с тем, чтобы нижняя или идущая впереди кромка 9 ворот не наткнулась на препятствующий объект 8 и не повредила его или не оказалась поврежденной препятствующим объектом 8.
В случае появления препятствующего объекта 8 на приводной двигатель 7 сегментарных жалюзийных ворот 1 по линии 10 подается предупредительный сигнал, вызывающий его остановку и/или реверсирование. Этот предупредительный сигнал формируется независимо от каких-либо устройств управления, с помощью которых, например, оператор включает или выключает привод 7 через устройство управления воротами, с помощью контрольного устройства управления дальномерного детектора, на чем ниже остановимся более подробно.
Вблизи нижнего угла проема 4 ворот, т.е. вблизи того угла прямоугольника проема 4 ворот, который относительно движения вниз нижней или идущей впереди кромки 9 ворот в положении закрытия идущей впереди кромки ворот оказывается поблизости от нее, находится дальномерный детектор, который обозначен вместе с рядом различных компонентов позицией 12.
Дальномерный детектор в предпочтительном варианте выполнения, среди прочего, содержит лазерное передающее и приемное устройство, излучаемые и принятые лучи которого с помощью отклоняющего механизма, реализуемого, предпочтительно, с помощью вращающегося зеркала, отклоняются в радиальном направлении в диапазоне по меньшей мере 90°. Отклоняющий механизм приводится в действие приводным двигателем, причем непрерывно регистрируется мгновенное положение отклоняющего зеркала при излучении и приеме сигнала датчика. На устройство управления подаются результирующие значения измерения времени прохождения и углового положения зеркала, так что по ним могут быть получены пары значений, состоящие из времени прохождения и направления луча.
Здесь для пояснения примера выполнения предполагается, что вращающееся зеркало вращается по часовой стрелке таким образом, что луч дальномерного детектора в интересующем диапазоне поворота от 0 до 90° сначала направлен вниз, а затем в конце этого диапазона поворота сориентирован в горизонтальном направлении, как это показано на фиг.2.
В частности, дальномерный детектор 12 контрольного устройства управления в начале цикла сканирования, т.е. тогда, когда угол α сканирования равен 0°, показывает расстояние h до места падения луча дальномерного детектора, а именно как раз устанавливаемой в этом случае высоты идущей впереди (передней) кромки 9 ворот относительно нулевого уровня, в то время как затем, когда в конце цикла сканирования угол α сканирования равен 90°, дальномерный детектор 12 показывает для контрольного устройства управления расстояние r, которое, само собой разумеется, как видно на фиг.2, соответствует ширине b дверного проема.
Разница в зависимостях данных r дальности, поставляемых дальномерным детектором 12 во время цикла сканирования на 90°, на отдельных участках состоит в том, что во время движения идущей впереди кромки 9 ворот в направлении закрывания от цикла к циклу сканирования в соответствии со становящимися все меньше значениями h высоты результаты r измерения дальности вследствие соответствующих различных характеристик изменяются, в то время как тогда, когда при промежуточных значениях угла α сканирования луч дальномерного детектора падает на боковое ограничение или на направляющую 6, от сканирования к сканированию постоянно имеется одна и та же характеристика для результата r измерения дальности, как это четко сделано на фиг.3.
Штрихпунктирная линия 20 на фиг.3 показывает результаты измерения дальности на диаграмме измеренных величин r в зависимости от угла α сканирования для падения луча дальномерного детектора на боковую направляющую 6 жалюзийных ворот согласно функции
r=b/sin α,
в то время как для падения луча дальномерного детектора на идущую впереди или нижнюю кромку 9 имеет место поле характеристик в соответствии с функциями
r=h/cos α,
где h - величина, зависящая от времени.
Во всяком случае, не прибегая к более точным математическим выкладкам, воспроизведение которых не представляет для специалиста никаких трудностей, со ссылкой на фиг.3 можно констатировать, что в том случае, если предположить очень большую угловую скорость луча дальномерного детектора по сравнению со скоростью опускания ворот, то приближенно можно исходить из постоянства высоты h идущей впереди или нижней кромки 9 ворот за то время, пока луч дальномерного детектора падает именно на эту нижнюю кромку 9 ворот, но еще не падает на боковое ограничение 6 проема ворот 4, за что отвечают изображенные на фиг.3 сплошными линиями характеристики r=h/cos α, обозначенные на фиг.3 позицией 21.
Если же перестать пренебрегать скоростью опускания жалюзийных ворот 1 по сравнению со скоростью сканирования или угловой скоростью луча дальномерного детектора, то характеристики r=h/cos α при каждом цикле сканирования будут смещаться вниз согласно прерывистым линиям 22, изображенным на фиг.3.
То или иное положение кромки закрытия ворот с учетом всех релевантных пар величин каждый раз дает постоянные величины h´для положения ворот, а именно
h´=r1 cos α1=r2 cos α2=…=rn cos αn
Следует признать, что тогда, когда дальномерный детектор 12 подает в контрольное устройство управления величины измерения дальности, сравниваемые с предельными величинами дальности, хранящимися в запоминающих средствах в соответствии с соображениями, приведенными ранее в связи с фиг.2 и 3, при равенстве величин измерения дальности в заданных пределах допуска с предельными величинами дальности распознается правильность процесса закрывания ворот, и остановка привода по предупредительному сигналу контрольным устройством управления не производится.
Однако каждый раз, когда с дальномерного детектора 12 при определенном угловом положении луча дальномерного детектора поступает как бы неожиданно меньшая величина измерения дальности, то это указывает на встречу луча дальномерного детектора с препятствием 8, въехавшим во время движения закрывания ворот в проем 4 ворот. Этот вывод справедлив как для фазы сканирования, во время которой луч дальномерного детектора падает на идущую впереди или нижнюю кромку 9 ворот, так и для части цикла сканирования, во время которого луч дальномерного детектора попадает на боковое ограничение проема 4 ворот.
Таким образом, в приведенной здесь системе с помощью одного единственного дальномерного устройства, установленного в углу прямоугольного дверного проема и охватывающего область сканирования 90° в плоскости закрывания ворот, можно контролировать всю плоскость закрывания ворот без установки защитной фоторелейной завесы для этой плоскости закрывания ворот, состоящей из множества фоторелейных барьеров.
Если привод 7 для ворот 1 выполнен таким образом, что исходить следует из постоянства скорости закрывания идущей впереди кромки 1 ворот, то в контрольном устройстве управления может быть предусмотрено автоматическое переключение хранящихся предельных величин дальности от характеристики 21 к характеристике 21 или от характеристики 22 к характеристике 23 (последнее - в случае сравнительно медленного сканирования дальномерным детектором 12).
Однако согласно предпочтительному усовершенствованному варианту приведенной здесь системы с помощью луча дальномерного детектора и дальномерного детектора 12 в сочетании с самим контрольным устройством управления можно также проводить соответственно измерение скорости относительно скорости закрывания идущей впереди или нижней кромки 9 ворот, причем со ссылкой на пример выполнения на фиг.1 и 2 обрабатываются последовательные величины измерения для угла сканирования α=0 (а именно r=h) последовательных циклов сканирования. При высоких рабочих скоростях электронных схем, применяемых в контрольном устройстве управления, для измерения скорости результаты измерения дальности, полученные во время одного и того же цикла сканирования, можно также использовать для угла α=0 и для угла сканирования, несколько отличающегося от 0.
Независимо от точной математической обработки величин измерения дальности, хранящихся в соответствующих запоминающих средствах, они могут быть также получены в результате проведения инициализационных прогонов ворот 1 с движением закрывания и сбора, во время этих инициализационных прогонов величин измерения дальности, полученных при определенной угловой скорости сканирования и их сохранения, в запоминающих средствах, причем эти запоминающие средства в данном случае при эксплуатации адресуются в зависимости от положения ворот, измеренного дальномерным детектором, а при необходимости в зависимости от определенной скорости ворот с тем, чтобы предельные величины дальности можно было снова изымать для сравнения с соответствующими величинами измерения дальности.
На фиг.4 изображен вариант выполнения, в котором для улучшения отражательных свойств идущей впереди или нижней кромки 9 ворот относительно луча дальномерного детектора, в частности, в рабочих фазах, при которых идущая впереди кромка 9 ворот находится вблизи положения закрытия, закреплен волнистый или зубчатый профиль, обозначенный на фиг.4 позицией 24.
На фиг.5-8 изображены ворота или двери, или закрывающие элементы, к которым применима приведенная здесь система. На фиг.5-8 для обозначения соответствующих компонентов на фиг.1-4 использованы, соответственно, одинаковые позиции.
В варианте выполнения на фиг.5 механизм сканирования, т.е., например, вращающееся зеркало дальномерного детектора 12, по аналогии с вариантом выполнения на фиг.1 установлено в нижнем углу проема 4 ворот и находится вблизи ограничивающей проем ворот стойки 25, противолежащей снабженной прорезью стойке по другую сторону проема 4 ворот, причем на стойках 25 и 26 держится снабженная шторными направляющими траверса 27, на которой подвешено полотно ворот или створка 28 дверей, перемещаемое(-ая) с помощью привода 7 для открывания или закрывания проема 4 ворот, показанного на фиг.5 лишь схематически. Направление вращения вращающегося зеркала выбирается против часовой стрелки относительно положения, показанного на фиг.5, таким образом, чтобы луч дальномерного детектора сначала падал на нижнюю идущую впереди кромку полотна 28 ворот и при этом, как было показано раньше, или от цикла к циклу сканирования производил измерение скорости движения закрывания полотна 28 ворот, или производил это измерение скорости путем сравнения соседних величин измерения дальности при небольшом регулируемом диапазоне поворота в ходе одного и того же цикла сканирования, чтобы независимо от этого произвести оценку характеристик предельных величин дальности, поясняемую в связи с фиг.3. Затем через некоторое время поворота луча дальномерного детектора он попадает на ограничение траверсой 27, так что величины измерения дальности придерживаются предельных величин измерения дальности в соответствии с характеристикой 20 на фиг.3.
Если согласно фиг.6 приведенную здесь систему применить к горизонтально перемещаемому полотну 28 ворот, не подвешенной на верхней траверсе ворот, а, например, опирающейся роликами на ровную подложку, как это схематически показано на фиг.6 позициями 29 и 30, то сканирующий механизм, например вращающееся зеркало дальномерного детектора 12, следует установить на верхнем конце стойки 25, причем луч дальномерного детектора вначале горизонтально падает в верхний угол идущей впереди кромки полотна 28 ворот, затем в соответствии с соображениями на основе фиг.3 относительно поля 21 и 22 характеристик предельных величин дальности попадает на идущую впереди кромку, в то время как луч дальномерного детектора, поворачиваясь по часовой стрелке, проходит вдоль кромки ворот вниз и затем, наконец, попадает на ровную подложку или на основание 30 горизонтально перемещаемого полотна 28 ворот, а затем в соответствии с соображениями согласно характеристике 20 на фиг.3 доходит до своего вертикального положения с направлением вниз.
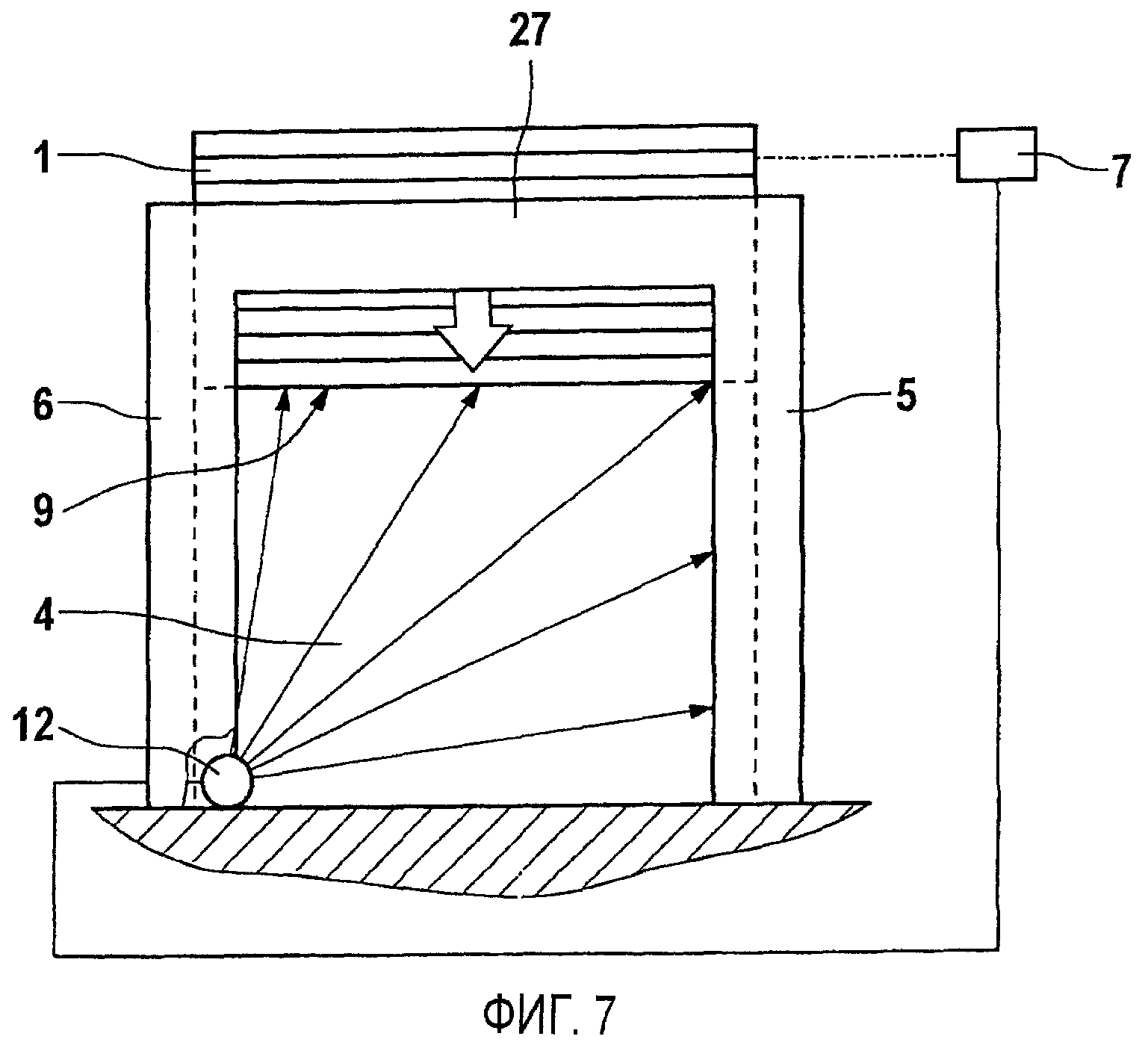
Вариант выполнения на фиг.7 в принципе не отличается от системы, показанной на фиг.1. На фиг.7 четко показано, что, само собой разумеется, вращающееся зеркало или другое отклоняющее средство дальномерного детектора 12 может быть также, соответственно, установлено в другом нижнем углу прямоугольного дверного проема 4, перекрываемого сегментарными воротами 1, таким образом, чтобы фиг.7 по сравнению с фиг.1 представляла соответствующий вид, например, с другой стороны плоскости створки двери, как это можно понять по обозначению направляющих 5 и 6 на фиг.7 в отличие от обозначения направляющих 5 и 6 на фиг.1. Кроме того, вариант выполнения на фиг.7 отличается от такового на фиг.1 тем, что направляющие 5 и 6 в варианте выполнения на фиг.7 соединены разрезной траверсой 27, через прорезь которой полотно ворот с помощью привода 7 опускается в положение закрытия или поднимается в положение открытия.
Однако следует заметить, как это четко изображено на фиг.8, что положение плоскости прямоугольного проема ворот, перекрываемого приведенной здесь системой, не ограничено вертикальной плоскостью. Последняя может также образовывать определенный угол относительно вертикали или иметь горизонтальную ориентацию, как это четко показано на фиг.8. Перекрытие таких проемов с предотвращением столкновения идущей впереди кромки ворот с препятствующим объектом с помощью соответствующего контроля может представлять интерес для перемещаемого монтажного перекрытия, перекрытий бассейнов, закрывающих элементов погрузочных люков грузовых судов и т.п.
Для всех ранее описанных вариантов выполнения вместо точных геометрических выкладок для определения хранящихся предельных величин дальности, сравниваемых с фактически полученными величинами измерения дальности с помощью луча дальномерного детектора, может быть целесообразно провести луч дальномерного детектора в ходе повторных циклов сканирования вдоль идущей впереди кромки ворот и вдоль бокового ограничения направляющей ворот и при этом собрать соответствующие величины измерения дальности, которые затем с определенным допуском записываются в память в качестве предельных измеренных величин дальности. Позже эта память в зависимости от, возможно, постоянно задаваемой скорости закрывания ворот или в зависимости от скорости закрывания ворот, определяемой от цикла к циклу, или в зависимости от скорости закрывания ворот, определяемой за короткий промежуток времени в начале цикла сканирования на основе соответствующей адресации во время сканирования идущей впереди кромки ворот, выдает именно те предельные величины длины сканирующего луча дальномерного детектора, которые затем, если они не будут превышены, указывают на наличие препятствующего объекта и вызывают остановку или/и реверсирование моторного двигателя полотна ворот или ворот. Во время сканирования лучом дальномерного детектора вдоль боковой прямолинейной направляющей ворот хранящиеся предельные величины остаются неизменными на том участке характеристики 20 согласно фиг.3, который остается между точкой пересечения текущей характеристики 21 или 22 на фиг.3 с единственной характеристикой 20 вплоть до длины r сканирующего луча дальномерного детектора, равной ширине b проема ворот.
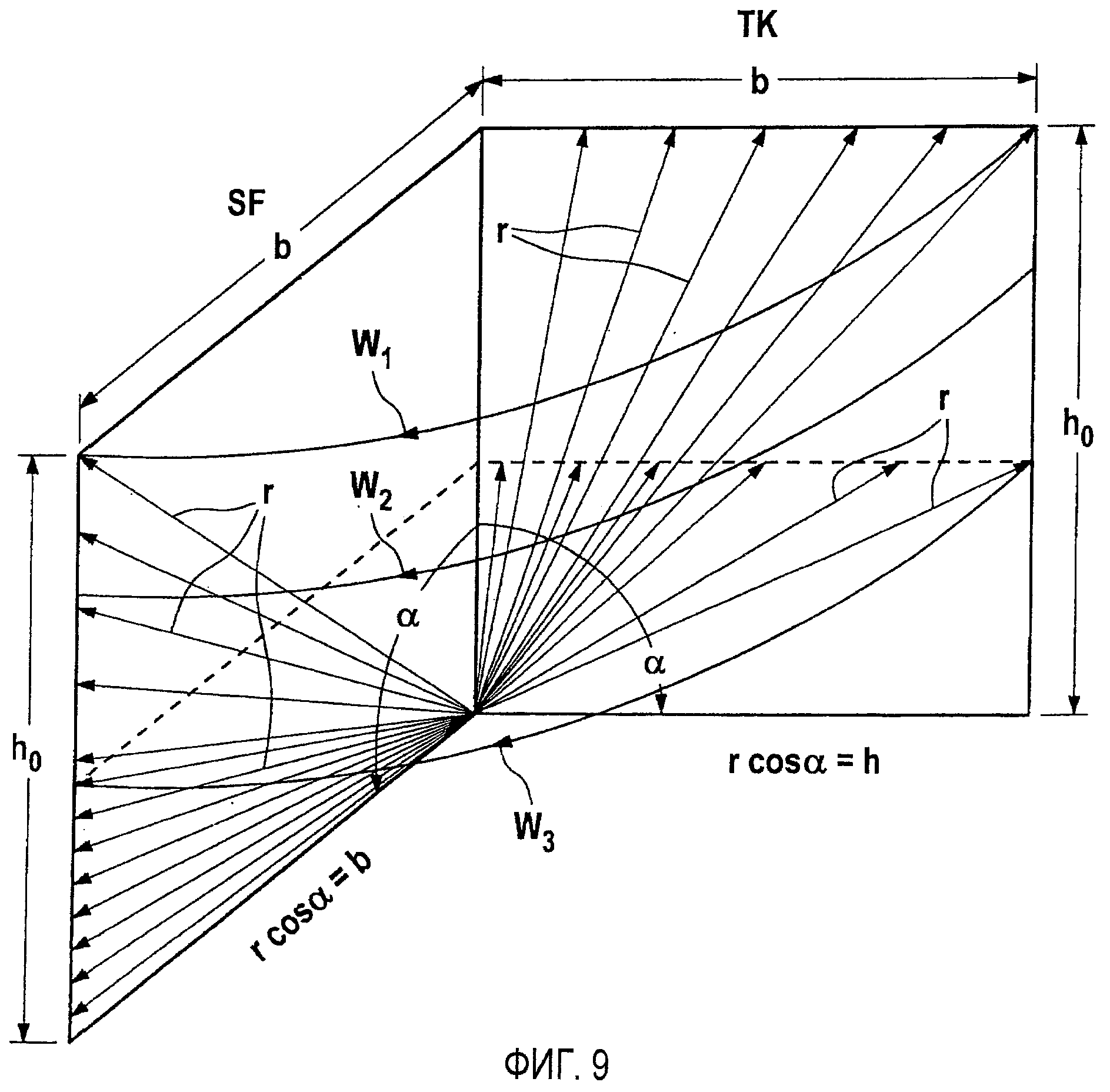
Наконец, на фиг.9 показана также трехмерная диаграмма, облегчающая выкладки относительно предельных величин, подаваемых в дальномерный детектор 12. Они, собственно, не обязательно должны быть характеристиками предельных величин, какими они изображены и пояснены выше, например, на фиг.3.
Если скорость сканирования или угловая скорость дальномерного детектора 12 оказывается чересчур высокой, настолько, что во время цикла сканирования дальномерного детектора 12 закрывающиеся ворота могут рассматриваться как остановленные, т.е. идущая впереди кромка во время цикла может рассматриваться как занимающая определенное положение h, h1, h2 и т.д. по высоте, уже вполне возможными являются проведение в дальномерном детекторе 12 тригонометрических действий с полученными величинами r и их последующее сравнение с постоянными предельными величинами.
На фиг.9 изображена плоскость ТК диаграммы, соответствующая плоскости кромки ворот, причем ширина проема ворот обозначена через b.
Пока луч детектора сканирует нижнюю кромку ворот, находящуюся на определенной высоте, в результате перемножения определенной дальномерным детектором величины для r с мгновенным значением угла сканирования - при сканировании против часовой стрелки при перемножении r cos α - всегда получается постоянная величина h.
Когда после этого сканирующий луч попадает в угол между идущей впереди кромкой ворот и ограничением проема ворот, противолежащим дальномерному детектору, то для следующего расчета предельной величины предназначается плоскость SF диаграммы, изображенная на фиг.9 под углом 90° к плоскости ТК и воспроизводящая условия при попадании луча детектора на боковую направляющую плоскости ворот.
Здесь к лучу детектора, длина которого перемножается с углом сканирования cos α, относится то, что постоянно получается величина b, что происходит от попадания луча детектора в угол между идущей впереди кромкой ворот и боковым ограничением проема ворот вплоть до ориентации луча детектора в горизонтальном направлении.
Таким образом, при наблюдении каждый раз, когда луч детектора попадает в угол между идущей впереди кромкой и боковым ограничением проема ворот, следует переходить от плоскости ТК диаграммы к плоскости SF диаграммы, как показано с помощью дугообразных стрелок W1, W2 и W3 на фиг.9 для соответственно уменьшающихся высот h идущей впереди кромки ворот над уровнем земли.
С помощью соответствующего правила умножения в дальномерном детекторе в зависимости от соответствующего мгновенного значения высоты идущей впереди кромки ворот добиваются того, чтобы хранимая предельная величина, с которой сравнивается результат обработанного измерения дальности, является постоянной.
Наконец, следует еще упомянуть, что приведенная здесь идея может быть использована в вариантах выполнения, в которых два полотна ворот симметрично двигаются навстречу друг другу, таким образом, чтобы устройство сканирования дальности находилось вблизи точки встречи обоих полотен ворот, а затем в соответственно модифицированном варианте выполнения имеет диапазон поворота сканирующего луча 180°. Такие усовершенствованные варианты выполнения следует рассматривать как охватываемые прилагаемыми пунктами формулы изобретения.
Реферат
Изобретение относится к способу и устройству для защиты плоскости закрывания ворот от помех. Способ для управления воротами (1), которые выполнены с возможностью перемещения в прямоугольном проеме (4) ворот из положения открытия в положение закрытия, где вблизи угла прямоугольника проема ворот, с помощью дальномерного детектора (12) в угловом диапазоне, предпочтительно 90°, в плоскости движения ворот поворачивают луч дальномерного детектора, полученные во время этого поворотного движения величины измерения дальности которого или тригонометрически пересчитанные на размеры ворот относительные величины дальности которого соответственно при падении луча дальномерного детектора на идущую впереди кромку (9) ворот и на параллельное направлению движения ворот ограничение прямоугольного проема (4) ворот сравнивают с хранящимися в запоминающих средствах соответствующими предельными величинами измерения дальности или измеренными тригонометрически пересчитанными на размеры ворот относительными предельными величинами измерения дальности, и что при появлении меньших по сравнению с ними величин измерения дальности формируют предупредительный сигнал, вызывающий остановку или/и реверсирование. Техническим результатом изобретения является упрощение системы управления воротами. 2 н. и 5 з.п. ф-лы, 9 ил.
Комментарии