Способ определения массы автомобиля - RU2444709C2
Код документа: RU2444709C2
Чертежи

Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к способу определения массы автомобиля, осуществляемому в сочетании с переключением автоматизированной коробки передач с нагруженной передачи на целевую передачу, причем для определения значения массы определяют величины силы и движения частично до или после переключения и частично во время переключения.
Уровень техники
Знание массы автомобиля принципиально важно для того, чтобы оптимально управлять процессом переключения автоматизированной коробки передач. Так, масса нужна для расчета сопротивления движению, точное определение которого необходимо для определения частоты вращения вала двигателя, при которой происходит выключение включенной в данный момент передачи и для определения целевой передачи, на которую осуществляется переключение. Например, у грузовых автомобилей и автобусов, масса которых может значительно изменяться при загрузке и разгрузке, масса автомобиля служит также для определения передачи, используемой для трогания с места.
Способ определения массы или общего веса автомобиля известен из публикации ЕР 0695930 А1. Этот известный способ относится к автомобилю, трансмиссия которого имеет в качестве приводного двигателя снабженный электронной системой управления двигатель внутреннего сгорания и ручную коробку передач. Для определения общего веса автомобиля в два момента времени, выбранных по отношению к переключению с пониженной передачи на повышенную, определяют крутящий момент приводного двигателя и продольное ускорение автомобиля и по этим данным рассчитывают вес автомобиля. Первые значения предпочтительно определять непосредственно до включения сцепления двигателя и нарастания момента двигателя, а вторые значения - после полного включения сцепления двигателя и нарастания момента двигателя. Для повышения точности определяемого таким путем общего веса предусмотрено формирование среднего значения нескольких значений веса, каждое из которых вычисляют по одним и тем же первым значениям и определенным в различные моменты времени вторым значениям. Однако, в частности, поскольку момент для определения первых значений выбран удачно из-за включенной синхронизации передачи и включения целевой передачи, определенное таким образом значение веса обнаруживает сравнительно большую неточность.
Другой способ определения массы автомобиля является предметом публикации WO 00/11439. Этот способ относится к автомобилю с автоматизированной коробкой передач, у которого тяговое усилие прерывается во время переключения передач. Согласно этому способу во временнóм окне, находящемся непосредственно до или после переключения передач, определяют несколько значений тягового усилия, т.е. величин силы, а в фазе, свободной от тягового усилия, во время переключения - по меньшей мере два значения скорости, т.е. величины движения, и по этим значениям вычисляют значение массы. Поскольку определенное этим способом значение массы также может иметь сравнительно большую неточность, предусмотрено формирование среднего значения нескольких определенных в одном ездовом цикле значений массы.
Недостатком обоих известных способов помимо неточности определенных значений веса или массы является также то, что за одно переключение можно определить только одно значение массы, поэтому для формирования среднего значения требуется сравнительно много переключений, а значит соответственно большой период времени одного ездового цикла.
Раскрытие изобретения
Поэтому в основу изобретения была положена задача разработки способа, позволяющего определять массу автомобиля быстрее и с большей точностью, чем до сих пор.
Для решения этой задачи предложен способ определения массы автомобиля, осуществляемый в сочетании с переключением автоматизированной коробки передач с нагруженной передачи на целевую передачу, причем для определения значения массы определяют величины силы и движения частично до или после переключения и частично во время переключения.
Кроме того, при осуществлении предлагаемого в изобретении способа определяют к ведущим колесам тяговое усилие приводного двигателя до F_zug_vor и после F_zug_nach переключения, определяют продольное ускорение автомобиля до a_zug_vor и после a_zug_nach переключения, а также во время переключения в свободной от тягового усилия фазе качения a_roll и на основе полученных значений по формуле m=F_zug/(a_zug-a_roll) вычисляют первое значение массы для начала переключения: m_vor=F_zug_vor/(a_zug_vor-a_roll) и второе значение массы для окончания переключения: m_nach=F_zug_nach/(a_zug_nach-a_roll).
По известному уравнению сопротивления движению
F_zug=F_steig+F_roll+F_luft+F_träg=F_fw+F_träg
тяговое усилие F_zug приводного двигателя, приложеннное к ведущим колесам автомобиля, находится в зависимости от сопротивления движения F_fw, которое складывается из суммы сопротивления движению в подъем F_steig, сопротивления качению F_roll и сопротивления воздуха F_luft, и от силы инерции массы F_träg автомобиля. Поскольку сила инерции массы F_träg равна произведению фактической массы m автомобиля на фактическое ускорение а автомобиля и составляет F_träg=m·а, сопротивление движению F_fw можно представить в виде
F_fw=F_zug-m·a.
Положив изменения сопротивления движению F_fw непосредственно перед и во время переключения и во время и непосредственно после переключения несущественными и вследствие размыкания трансмиссии в свободной от тягового усилия фазе переключения (F_zug_roll=0), получаем:
F_fw_vor=F_zug_vor-m·a_zug_vor=F_fw_roll=-m·a_roll
и
F_fw_roll=-m·a_roll=F_fw_nach=F_zug_nach-m·a_zug_nach.
Отсюда для каждого из двух значений массы за одно переключение следует:
m_vor=F_zug_vor/(a_zug_vor-a_roll)
и
m_nach=F_zug_nach/(a_zug_nach-a_roll)
Таким образом, предлагаемый в изобретении способ обеспечивает определение двух значений массы за одно переключение, причем первое значение массы m_vor по времени соответствует началу переключения, а второе значение массы m_nach - окончанию переключения. При этом точность обоих значений массы m_vor, m_nach определяется соответствующим моментом определения значения тягового усилия и значения ускорения, а также конкретными действиями и по крайней мере не хуже, чем точность значений веса или массы, определяемых известными способами.
В отношении точности особенно критическим является определение ускорения a_roll в свободной от тягового усилия фазе переключения между выключением и включением сцепления двигателя, так как в этой фазе на выходную (ведомую) сторону трансмиссии могут действовать практически неизвестные и трудно поддающиеся измерению усилия или моменты. Так, практически неизвестно, насколько быстро приводной двигатель во время переключения сбрасывает и снова наращивает свой крутящий момент, какая доля крутящего момента теряется при синхронизации с целевой передачей и как крутильные колебания, которые могут возникать при включении и выключении сцепления двигателя, при выключении нагруженной передачи и при синхронизации с целевой передачей и ее включении или вследствие неровностей дорожного полотна, влияют на динамику движения автомобиля, т.е. на фактическое ускорение.
Поэтому ускорение a_roll в фазе качения при переключении передач предпочтительно определять, регистрируя в промежутке времени Δt, включающем в себя свободную от тягового усилия фазу переключения, несколько дискретных значений a_i фактического ускорения а автомобиля, определяя по этим значениям ускорения a_i при переключении в режим тяги (т.е. при направлении силового потока от двигателя к колесам) минимум ускорения a_min, а при переключении на режим принудительного холостого хода (т.е. при направлении силового потока от колес к двигателю) - максимум ускорения а_max, и затем используя это крайнее значение, или экстремум, ускорения (a_min или a_max) в качестве ускорения a_roll.
По опыту, при таком подходе ускорение a_roll определяется надежно и с высокой точностью, поэтому и производные от него значения массы m_vor и m_nach определяются сравнительно точно.
Для повышения точности при определении ускорения a_roll в свободной от тягового усилия фазе, а значит и значений массы m_vor и m_nach, для регистрации оптимального предельного значения ускорения (a_min или a_max) значения ускорения a_i целесообразно определять с интервалом во времени не более 10 мс. В этом отношении для исключения погрешностей измерения и помех также предпочтительно фильтровать значения ускорения a_i перед определением крайнего значения ускорения (a_min или a_max), для чего существуют известные численные методы.
Поскольку же значения массы m_vor и m_nach, определенные за одно переключение, как это описано выше, могут быть слишком неточными для целей управления, а также для определения частоты вращения при переключении и соответствующей целевой передачи будущих переключений, целесообразно выполнять усреднение значений массы m_i, определенных за несколько переключений. Для этого после начала определения значений массы те значения массы, которые удовлетворяют заранее заданным минимальным условиям, можно суммировать для формирования предусмотренного для целей управления первого среднего значения массы m_m1, пока не будет достигнуто заранее заданное минимальное число n значений массы m_i, с последующим вычислением первого среднего значения массы m_m1 путем формирования среднего арифметического по формуле m_m1=1/n·∑m_i, (i=1, n), и это среднее значение массы m_m1 можно сначала использовать для целей управления.
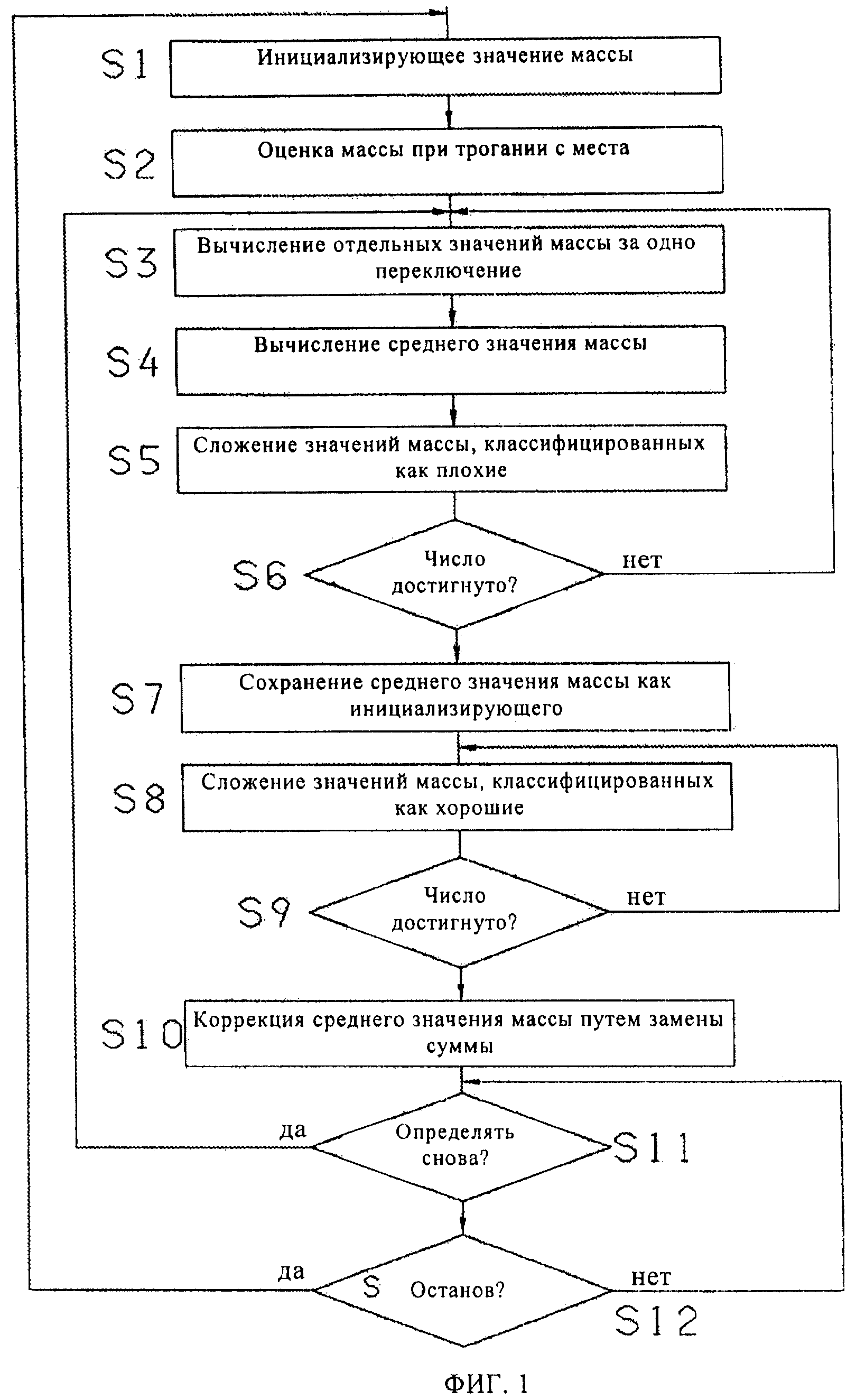
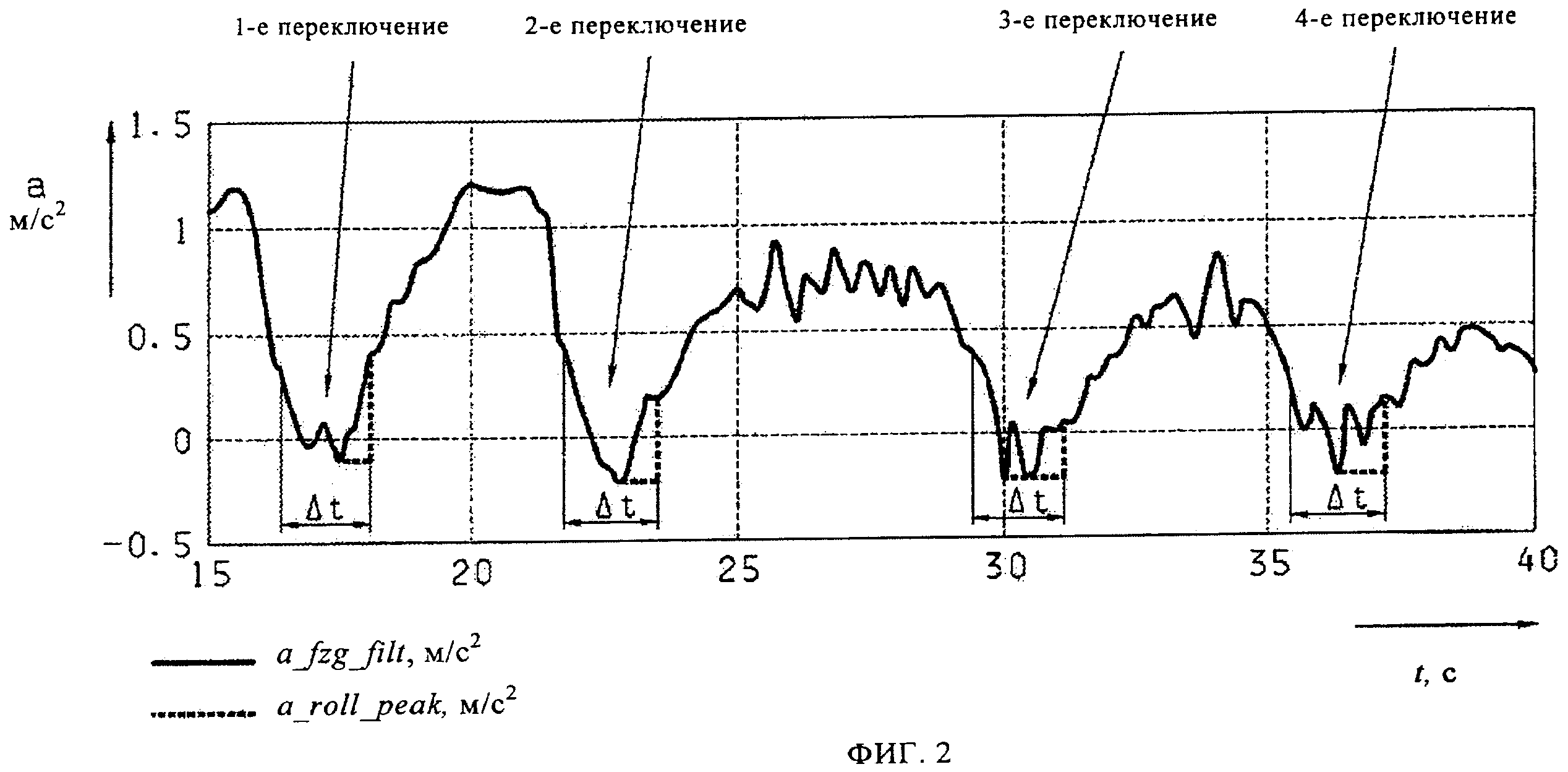
Минимальное условие может заключаться в том, что разность ускорений a_zug-a_roll должна быть больше заранее заданного нижнего предельного значения разности ускорений Δa_min (a_zug-a_roll>Δa_min). Другое минимальное условие может заключаться в том, что тяговое усилие F_zug при переключении в режим тяги должно быть больше заранее заданного нижнего предельного значения F_Zmin тягового усилия (F_zug>F_Zmin), а при переключении на режим принудительного холостого хода - должно быть меньше заранее заданного верхнего предельного значения F_Smax усилия принудительного холостого хода (F_zug В качестве минимального числа n значений массы m_i для определения достаточно точного среднего значения массы m_m1 в практических опытах оказалось достаточным число порядка 10-20 значений. Таким образом за сравнительно короткое время, т.е. при благоприятных условиях уже после пяти переключений, определяется относительно точное первое среднее значение массы m_m1, которое в дальнейшем можно использовать для целей управления. Прежде чем будет получено это первое среднее значение массы m_m1 целесообразно предусмотреть использование для целей управления значения массы по умолчанию m_Def, которое может представлять собой, например, среднее значение между массой порожнего автомобиля и максимально допустимой полной массой, или оценочное значение массы m_Sch, которое может представлять собой, например, среднее значение массы, определенное последним в последнем ездовом цикле. Для определения более точного среднего значения массы после достижения минимального числа n значений массы m_i и вычисления первого среднего значения массы m_m1 целесообразно определять дополнительные значения массы m_i, удовлетворяющие заранее заданным условиям для хороших значений массы m_gut_i, и посредством дополнительных хороших значений массы m_gut_i корректировать первое среднее значение массы m_m1. Эта коррекция может осуществляться путем последовательной замены вошедших в сумму первого среднего значения массы m_m1 плохих значений массы m_schlecht_i дополнительно определенными хорошими значениями массы m_gut_i. Однако недостатками при этом явились бы сложность индицирования плохих значений массы m_schlecht_i и высокая общая вычислительная нагрузка. Поэтому в настоящем изобретении предпочтение отдается подходу к коррекции первого среднего значения массы m_m1, при котором уже во время суммирования значений массы m_i для формирования первого среднего значения массы m_m1 те значения массы m_i, которые не удовлетворяют условиям для хороших значений массы, суммируют, или складывают, в плохую сумму ∑m_schlecht_i, (i=1, n_schlecht), дополнительные же хорошие значения массы m_gut_i определяют и суммируют в хорошую сумму ∑m_gut_i, (i=1, n_gut) до тех пор, пока их число не станет равным числу n_schlecht просуммированных до этого плохих значений массы m_schlecht_i, после чего путем замены плохой суммы ∑m_schlecht_i хорошей суммой ∑m_gut_i в общей сумме ∑m_i первого среднего значения массы m_m1 вычисляют более точное второе среднее значение массы m_m2, которое используют для целей управления в дальнейшем. Условия для хороших значений массы m_gut_i представляют собой ужесточенные по сравнению с минимальными условиями требования, позволяющие исключить влияние погрешностей измерения и мешающих факторов на определение значений массы или по меньшей мере значительно ослабить это влияние и тем самым получить сравнительно точные значения массы m_gut_i. В одном из вариантов осуществления предлагаемого в изобретении способа условие для хороших значений массы в начале переключения m_vor_gut заключается в том, что разность значений наклона дорожного полотна в момент инициирования переключения α_vor и в фазе качения α_roll должна быть меньше заранее заданного предельного значения Δα_max1(|α_vor-α_roll|<Δα_max1). Другое условие для хороших значений массы в начале переключения m_vor_gut может заключаться в том, что тяговое усилие до переключения F_zug_vor при переключении в режим тяги должно быть больше заранее заданного предельного значения F_zug_Zmin1(F_zug_vor>F_zug_Zmin1), а при переключении на режим принудительного холостого хода - должно быть меньше заранее заданного предельного значения F_zug_Smax1(F_zug_vor Кроме того, условие для хороших значений массы в конце переключения m_nach_gut может заключаться в том, что разность значений наклона дорожного полотна в момент инициирования переключения α_vor и в момент вычисления второго значения массы α_nach должна быть меньше заранее заданного предельного значения Δα_max2(|α_vor-α_nach|<Δα_max2). Еще условие для хороших значений массы в конце переключения m_nach_gut может заключаться в том, что тяговое усилие в момент вычисления второго значения массы m_nach при переключении в режим тяги должно быть больше заранее заданного предельного значения F_zug_Zmin2(F_zug_nach>F_zug_Zmin2), а при переключении на режим принудительного холостого хода -должно быть меньше заранее заданного предельного значения F_zug_Smax2(F_zug_nach Кроме того, условием для хороших значений массы в конце переключения m_nach_gut может быть то, что разность крутящих моментов приводного двигателя до и после переключения M_zug_vor, M_zug_nach должна быть меньше заранее заданного предельного значения ΔM_max(|M_zug_vor-M_zug_nach|<ΔМ_max). Другое условие для хороших значений массы m_vor_gut и m_nach_gut заключается в том, что рабочая температура приводного двигателя t_M должна быть больше заранее заданного предельного значения t_M_min (t_M>t_M_min). Кроме того, условие для хороших значений массы m_vor_gut, m_nach_gut может заключаться в том, что включенная перед переключением передача (нагруженная передача G_L) должна быть выше самой низшей передачи G_min и ниже самой высшей передачи G_max (G-L>G_min, G_L Поскольку, в частности, у грузового автомобиля полная масса может изменяться даже во время движения в связи с погрузочно-разгрузочными работами, а значит может отличаться от ранее определенного среднего значения массы (m_m1 или m_m2), целесообразно определять изменение массы m автомобиля относительно текущего среднего значения массы (m_m1 или m_m2) и при превышении заранее заданного предельного значения изменения m_max начинать определение нового среднего значения массы (m_m1, m_m2). Для этого в предпочтительном варианте осуществления изобретения по значениям массы m_i, удовлетворяющим условиям для хороших значений массы m_vor_gut, m_nach_gut, непрерывно, т.е. параллельно с определением средних значений массы m_m1, m_m2 и независимо от них, вычисляют скользящее среднее значение m_mgl, и определение новых средних значений массы m_m1, m_m2 начинают, если разность между скользящим средним значением m_mgl и последним найденным средним значением массы (m_m1 или m_m2) превысит заранее заданное предельное значение Δm_m_max(|m_mgl-m_m1|>Δm_m_max или |m_mgl-m_m2|>Δm_m_max). Краткое описание чертежей Осуществление изобретения поясняется со ссылкой на чертежи, на которых показано: на фиг.1 - блок-схема осуществления предлагаемого в изобретении способа, на фиг.2 - измеренная временная характеристика ускорения а автомобиля по нескольким переключениям при переключении в режим тяги, на фиг.3 - упрощенные временные характеристики тягового усилия F_zug и ускорения а для одного переключения на повышенную передачу в режиме тяги. Осуществление изобретения На блок-схеме фиг.1 в упрощенном виде показана схема осуществления предлагаемого в изобретении способа во времени. С приведением автомобиля в движение начинается осуществление способа определения массы автомобиля и после инициализации на шаге S1 на шаге S2 во время трогания с места определяется первое, относительно неточное значение массы. На следующем шаге S3 определяют два значения массы за одно переключение. На шаге S4 происходит суммирование с возможно уже имеющимися значениями массы и на основании полученных значений выполняется вычисление первого среднего значения массы m_m1. На следующем шаге S5 те значения массы m_i, которые не удовлетворяют условиям для хороших значений массы, а значит классифицируются как плохие, складываются в плохую сумму ∑m_schlecht_i. После этого на шаге S6 проверяют, достигнуто ли уже требуемое минимальное число n значений массы m_i для формирования первого среднего значения массы m_m1. Если нет, шаги S3-S6 повторяют до тех пор, пока не будет достигнуто минимальное число n значений массы m_i. Затем первое среднее значение массы m_m1 на шаге S7 сохраняют в памяти как инициализирующее значение для будущих ездовых циклов. На следующем шаге S8 дополнительно суммируются определенные и классифицированные как хорошие значения массы m_gut_i. После этого на шаге S9 проверяют, достигло ли число n_gut дополнительных значений массы m_gut_i, классифицированных как хорошие, числа n_schlecht первых значений массы m_schlecht_i, классифицированных как плохие. Если нет, шаги S8 и S9 повторяют до тех пор, пока число n_gut хороших значений массы m_gut_i не достигнет числа n_schlecht плохих значений массы m_schlecht_i. Затем на шаге S10 выполняют коррекцию первого среднего значения массы m_m1 путем замены содержащейся в нем суммы плохих значений массы ∑m_schlecht_i только что определенной суммой хороших значений массы ∑m_gut_i, за счет чего формируется значительно более точное второе среднее значение массы m_m2. С помощью не рассматриваемых здесь подробно критериев, например отклонения скользящего среднего значения m_mgl определяемых далее текущих значений массы m_gut_i от последнего определенного среднего значения массы m_m2, на шаге S11 проверяют, следует ли снова начинать определение массы m путем вычисления средних значений массы m_m1, m_m2. В этом случае выполняют условный обратный переход к состоянию перед шагом S3. Если нет, то на следующем шаге S12 проверяют, продолжается ли остановка автомобиля достаточно долго или был ли приводной двигатель выключен, что в результате обратного перехода перед операцией S1 ведет к полному новому началу осуществления способа. В противном случае выполняется условный обратный переход к состоянию перед шагом S11, так что шаги S11 и S12 непрерывно выполняются до тех пор, пока не будет выполнено одно из двух условий, и затем соответственно выполняется условный обратный переход. Поскольку определение хороших значений массы m_gut_i основано на точной регистрации ускорения a_roll автомобиля в свободной от тягового усилия фазе переключения передач, определение этого значения ускорения a_roll в качестве примера показано на диаграмме фиг.2. Здесь представлена временная характеристика ускорения а автомобиля за несколько переключений передач, связанных с прерыванием тягового усилия. При этом сплошной линией показаны отфильтрованные значения a_fzg_filt значений ускорения а_i, определяемых непрерывно, т.е. с заданным временным интервалом около 10-20 мс. Каждое переключение является переключением в режим тяги. Следовательно, каждое переключение ведет к падению ускорения а, которое при переключениях принимает отрицательные значения. Таким образом, автомобиль во время переключения тормозится эффективным сопротивлением движению F_fw, поскольку трансмиссия временно разомкнута и на ведущие колеса не передается приводной момент в виде тягового усилия (F_zug=0). Для определения ускорения а в свободной от тягового усилия фазе переключения передач при каждом переключении за промежуток времени Δt, содержащий свободную от тягового усилия фазу, определяют крайнее значение зарегистрированных в этот период времени значений ускорения a_i. Поскольку в данном случае речь идет о переключениях в режим тяги, определяют минимум ускорения a_min. Характеристика этого предельного значения a_roll_peak представлена на фиг.2 прерывистой линией. Очевидно, что способ, несмотря на сильные помехи в начале и окончании переключения, позволяет надежно определять минимум ускорения a_min. Этот минимум ускорения a_min однозначно соотносится с мгновенным сопротивлением движению F_fw, благодаря чему возможен относительно точный расчет двух значений массы m_vor и m_nach за одно соответствующее переключение. Для более подробного пояснения способа на фиг.3 переключение на повышенную передачу в режим тяги представлено упрощенными временными характеристиками ускорения а и приложенного к ведущим колесам тягового усилия F_zug приводного двигателя с более высоким разрешением во времени. Переключение начинается в момент времени t1 заканчивается в момент времени t4. Между моментами времени t1 и t2 сцепление двигателя выключается и крутящий момент приводного двигателя понижается, в некоторых случаях выключается также включенная нагруженная передача. Непосредственно перед моментом времени t3 выполняют синхронизацию с целевой передачей, а затем включение целевой передачи. Включение сцепления двигателя и наращивание крутящего момента происходят между моментами времени t3 и t4. Таким образом, свободная от тягового усилия фаза переключения (фаза качения или движения накатом) длится примерно между моментами времени t2 и t3, однако в начале и в конце этого промежутка времени, как известно, еще могут действовать сильные мешающие факторы. В середине же фазы, свободной от тягового усилия, на ускорение а помехи практически не действуют, и оно соответствует искомому минимальному значению a_min или a_roll. Для определения первого значения массы m_vor=F_zug_vor/(a_zug_vor-a_roll) определяют тяговое усилие F_zug_vor и ускорение a_zug_vor непосредственно перед началом переключения, т.е. до момента времени t1. Аналогично для определения второго значения массы m_nach=F_zug_nach/(a_zug_nach-a_roll) определяют тяговое усилие F_zug_nach и ускорение a_zug_nach сразу по окончании переключения, т.е. после момента времени t4. Определение же ускорения a_roll для обоих значений массы m_vor и m_nach идентично и осуществляется, как описано выше, путем определения минимума ускорения a_min в свободной от тягового усилия фазе переключения. Для надежного определения этого минимума ускорения a_min промежуток времени Δt, в котором по фактическим значениям ускорения a_i или a_fzg_filt определяют минимум ускорения a_min, выбирают таким образом, чтобы в нем обязательно содержалась фаза, свободная от тягового усилия. Промежуток времени Δt может, например, как показано в верхней части фиг.3, длиться с момента времени t1 до момента времени t4 или, как показано в нижней части фиг.3, - с момента времени t2 до момента времени t3. Условные обозначения
Реферат
Изобретение относится к способу определения массы транспортного средства для осуществления переключения автоматизированной коробки передач. Способ включает определение приложенного к ведущим колесам тягового усилия приводного двигателя до F_zug_vor и после F_zug_nach переключения, определение продольного ускорения автомобиля до a_zug_vor и после a_zug_nach переключения, определение ускорения во время переключения в свободной от тягового усилия фазе качения a_roll. На основе полученных значений вычисляют первое значение массы для начала переключения m_vor=F_zug_vor/(a_zug_vor-a_roll) и второе значение массы для окончания переключения m_nach=F_zug_nach/(a_zug_nach - a_roll). Технический результат заключается в повышении динамических качеств транспортного средства. 19 з.п. ф-лы, 3 ил.
Комментарии