Система и способ контроля нагрузки опоры шасси, опора шасси летательного аппарата и летательный аппарат, использующие названную систему - RU2416548C2
Код документа: RU2416548C2
Чертежи







Описание
Область техники, к которой относится изобретение
Изобретение относится к мониторингу нагрузок на опору шасси летательного аппарата.
Уровень техники
Летательный аппарат должен приземляться в различных условиях, при которых возникают различные нагрузки на шасси летательного аппарата, и при некоторых ситуациях может произойти жесткая посадка, потенциально влекущая за собой повреждение шасси летательного аппарата. В настоящее время жесткая посадка регистрируется различными способами, например самим пилотом, или на некоторых летательных аппаратах регистрация инициализируется нештатной ситуацией, возникающей, например, когда при посадке результаты измерения скорости снижения или ускорения центра тяжести летательного аппарата превосходят заданное допустимое значение. Регистрации жестких посадок любым способом приводят к значительным ремонтным и эксплуатационным издержкам для авиакомпании, так как требуют проведения последующего контроля после посадки с последующей задержкой и отменой рейсов, что также влечет дополнительные затраты.
Регистрация жесткой посадки обычно приводит к последующему более тщательному изучению условий нагружения шасси летательного аппарата на основе более широкого объема полетной информации, чем обычно получается при первоначальной оценке жесткой посадки (Анализ Летных Данных). Этот последующий Анализ Летных Данных, конечно, является времязатратной процедурой, так как при нем проводится учет нагрузок на отдельные опоры шасси, возникающие, например, из-за резкого снижения, низкого отношения подъемной силы к весу, при рулении или буксировке аппарата.
Опора шасси летательного аппарата обычно содержит цилиндрическую стойку, включающую телескопическое устройство амортизатора, в одном из типов которого рабочая жидкость продавливается через отверстие или отверстия в диафрагме, помещенной в цилиндрической стойке. Используется также азот, создающий упругое противодействие в демпфирующей камере. Группа кольцевых уплотнений, заложенных между телескопическими частями, используется для удержания рабочей жидкости и сжатого азота в цилиндрической стойке, а входной канал для подачи рабочей жидкости обычно герметизируется гайкой сальника.
Существует множество типов опор шасси, и некоторые из них при перегрузках могут подвергаться внутреннему повреждению, такому как, например, повреждение диафрагмы, которое не может быть легко выявлено. Другие опоры шасси при перегрузках могут испытывать наружное повреждение, такое как, например, остаточное удлинение компонентов стойки, подвергшихся растяжению при посадке, которое не может быть просто обнаружено.
Один из используемых в настоящее время способов обнаружения повреждений, а именно Анализ Полетных Данных, можно охарактеризовать следующим образом:
он основан на измерении скорости и ускорения центра тяжести летательного аппарата, а не на состоянии отдельной опоры шасси;
скорость снижения центра тяжести летательного аппарата при его посадке определяется по информации, полученной с носового радиоальтиметра, с помощью фильтра Кальмана преобразуемой в скорость снижения центра тяжести летательного аппарата;
данные снимаются с относительно низкой частотой, один раз за 100 миллисекунд, что приводит к большим задержкам, влекущим за собой неоднозначность в определении временных характеристик и численных значений событий, возникающих во вспомогательных системах;
запуск может произойти при слишком низких нагрузках на опору шасси, вероятно для того, чтобы удовлетворить конструктивные требования к летательному аппарату для случая жесткой посадки, обусловленные необходимостью в оценке потенциальной возможности повреждения опоры шасси;
вместо непосредственного измерения нагрузки на опору шасси делается упор на скорость снижения и ускорение, что ставит точность полученного результата в зависимость от массы летательного аппарата;
регистрация момента касания земли осуществляется на основе определения вращения колес, что приводит к слишком большой задержке точного определения действительного момента касания;
отсутствует немедленное подтверждение превышения нагрузки на опору шасси установленного предела, вместо чего делается упор на последующую обработку соответствующей информации по обнаружению жесткой посадки;
в логических операциях используются установленные пределы, полученные для случаев, в которых измерения показали превышение наибольших нагрузок на опору шасси, а не для реальных условий посадки при различных отношениях подъемной силы к весу, рулении и буксировке летательного аппарата;
для случая четырехколесной шарнирной тележки логические операции не учитывают отличия условий нагружения для двухколесной и четырехколесной фаз посадки.
Корректное определение нагрузок на опору шасси становится более проблематичным для опоры с поворотной тележкой, скрепленной с нижним концом стойки опоры и имеющей две или более пары колес, соединенных с тележкой. Часто предпочтительно, чтобы такие опоры шасси устанавливались перед посадкой и в финальных стадиях взлета в положение, при котором тележка наклонена так, что передняя пара колес была бы выше относительно земли, чем задняя пара колес. Это можно назвать положением по потоку, и в этом положении тележка наклонена под углом к поверхности земли. Однако по мере полного контакта с землей тележка, как правило, выравнивается параллельно поверхности земли.
Раскрытие изобретения
В изобретении предложена система контроля нагрузки опоры шасси летательного аппарата, содержащая несколько пар колес ходовой части, датчик давления, который расположен в демпфирующей камере основной стойки опоры шасси с возможностью измерения давления рабочей жидкости в основной стойке опоры шасси, причем датчик давления выдает выходной электрический сигнал, соответствующий давлению, которое он измеряет, первый датчик опоры шасси для регистрации и сигнализации того, что опора шасси выпущена, второй датчик опоры шасси для регистрации и сигнализации об установлении первого режима работы ходовой части, когда она находится в таком положении по полету, при котором первая пара из нескольких пар колес на ходовой части придет в первоначальный контакт с землей, третий датчик опоры шасси для регистрации и сигнализации об установлении второго режима работы ходовой части, когда вторая пара из нескольких пар колес ходовой части в добавление к первой паре колес полностью придет во взаимодействие с землей, блок обработки сигнала, включенный так, чтобы получать сигналы со всех датчиков, причем после получения сигнала с первого датчика опоры шасси, свидетельствующего о том, что опора шасси выпущена, блок обработки сигнала при работе оценивает сигналы с датчика давления с точки зрения работы в первом и втором режимах и выдает основной выходной сигнал о результатах этой оценки. Система содержит также выходной каскад, включенный так, чтобы получать основной выходной сигнал с блока обработки сигнала и давать представление выходного сигнала с блока обработки сигнала в виде, соответствующем первому или второму режимам работы.
Блок обработки сигнала может содержать информацию, представляющую собой первое ограничительное значение сигнала с датчика давления при работе опоры в первом режиме, причем блок обработки сигнала выдает первый дополнительный выходной сигнал, отражающий соотношение величины сигнала с датчика давления, полученного при работе в первом режиме, и первого предельного значения сигнала.
Блок обработки сигнала может содержать информацию, представляющую собой второе ограничительное значение сигнала с датчика давления при работе опоры в первом режиме, превышающее первое предельное значение, причем блок обработки сигнала выдает второй дополнительный выходной сигнал, отражающий соотношение величины сигнала с датчика давления, полученного при работе в первом режиме, и второго предельного значения.
Блок обработки сигнала может продолжать выдавать второй дополнительный выходной сигнал, отражающий соотношение величины сигнала с датчика давления при работе в третьем режиме и второго предельного значения.
Блок обработки сигнала может содержать информацию, представляющую третье предельное значение сигнала с датчика давления при работе опоры шасси во втором режиме, блок обработки сигнала выдает третий дополнительный выходной сигнал, отражающий соотношение величины сигнала с датчика давления, полученного при работе во втором режиме, и третьего предельного значения.
Блок обработки сигнала может содержать информацию, представляющую четвертое предельное значение сигнала с датчика давления при работе опоры во втором режиме, превышающее третье предельное значение, причем блок обработки сигнала выдает четвертый дополнительный выходной сигнал, отражающий соотношение величины сигнала с датчика давления, полученного при работе во втором режиме, и четвертого предельного значения.
В одном из вариантов предельные значения могут получаться компьютерным моделированием работы опоры шасси.
Блок обработки сигнала может быть выполнен с возможностью определения (захватывания) пиковой величины сигнала с датчика давления при работе в первом режиме.
Блок обработки сигнала может быть выполнен с возможностью определения (захватывания) пиковой величины сигнала с датчика давления при работе во втором режиме.
Блок обработки сигнала может быть выполнен таким образом, что захватывает пиковую величину сигнала с датчика давления при работе в первом режиме, а выходной каскад действует с возможностью представления о соотношении пиковой величины сигнала с датчика давления, полученного при работе в первом режиме, и первого и второго предельных значений.
Блок обработки сигнала может захватывать пиковую величину сигнала с датчика давления при работе во втором режиме, а выходной каскад определять соотношение пиковой величины сигнала с датчика давления, полученного при работе во втором режиме, и третьего и четвертого предельных значений.
В одном из вариантов выполнения блок обработки сигнала при работе выдает основной выходной сигнал с блока обработки сигнала, характеризующий нагрузку, испытываемую основной стойкой опоры шасси.
Основной выходной сигнал и предельные значения могут быть отображены совместно, при этом основной информацией является соотношение пиковой величины основного выходного сигнала и его предельных значений, а отображенная информация не нуждается в выражении в каких-либо специальных единицах измерения.
Блок обработки сигнала может содержать первую таблицу соответствия, связывающую величину сигнала с датчика давления с нагрузкой, испытываемой опорой шасси в первом режиме, и основной выходной сигнал с блока обработки сигнала вырабатывается по информации, получаемой с первой таблицы соответствия.
Блок обработки сигнала может содержать вторую таблицу соответствия, связывающую величину сигнала с датчика давления с нагрузкой, испытываемой опорой шасси во втором режиме, и основной выходной сигнал с блока обработки сигнала вырабатывается по информации, получаемой с второй таблицы соответствия.
В одном из вариантов выполнения блок обработки сигнала снимает сигнал с датчика давления с интервалом около 20 миллисекунд. При несколько более высоких или более низких интервалах съема информации также можно осуществлять эффективный захват пиковых величин.
Система контроля нагрузки опоры шасси, выполненная в соответствии с настоящим изобретением, пригодна для использования и работоспособна и в случае четырехколесной тележки.
В одном из вариантов выполнения датчик положения шарнирного соединения опоры шасси выполняет функции второго и третьего датчиков опоры шасси.
Опора шасси летательного аппарата с заявляемой системой может содержать встроенный индикатор нагрузки, испытываемой опорой шасси при эксплуатации летательного аппарата, снабженного шасси.
Летательный аппарат может содержать систему контроля нагрузки опоры шасси, выполненную в соответствии с настоящим изобретением и содержащую встроенный индикатор нагрузки, испытываемой опорой шасси при эксплуатации летательного аппарата.
Системой контроля нагрузки опоры шасси может управлять компьютерная программа, записанная, например, на некотором носителе.
В изобретении также предложен способ работы заявляемой системы, предназначенной для опоры шасси летательного аппарата, содержащей несколько пар колес ходовой части, включающий:
измерение давления рабочей жидкости гидросистемы в основной стойке опоры шасси и выдачу выходного электрического сигнала, соответствующего измеренному давлению;
обнаружение и сигнализацию о том, что опора шасси выпущена;
обнаружение и сигнализацию, когда ходовая часть находится в положении по полету, причем состояние ходовой части в положении по полету и идентифицируется после этого как работа в первом режиме;
обнаружение и сигнализацию, когда вторая пара из нескольких пар колес ходовой части в добавление к первой паре колес полностью вступит во взаимодействие с землей, причем состояние, при котором первая и вторая пары из нескольких пар колес ходовой части полностью взаимодействуют с землей, идентифицируется после этого как работа во втором режиме;
оценку сигналов измерения давления рабочей жидкости гидросистемы в связи с первым и вторым режимами соответственно и выдачу основного выходного сигнала, отображающего результаты такой оценки;
представление основного выходного сигнала в виде, соответствующем первому или второму режиму.
Работа системы контроля нагрузки шасси может быть запрограммирована в соответствии с приведенным выше способом.
Предметом изобретения является система, определяющая в процессе работы превышение при посадке предела нагрузки для конкретной опоры шасси и предупреждающая экипаж и ремонтную бригаду о необходимости или проведения сервисных операций, или ремонта опоры шасси. Система также показывает отсутствие превышения предела нагрузки для опоры шасси и тем самым дает возможность избежать ненужных операций с опорой шасси.
Система осуществляет мониторинг давления в демпфирующей камере амортизатора, выдавая индикацию о пиковой нагрузке, пришедшейся на корпус амортизатора, при этом пиковая нагрузка на амортизатор в свою очередь отражает пиковую нагрузку, воздействующую на опору шасси.
Система выдает непосредственную индикацию о пиковой нагрузке, воздействующей на опору шасси, вне зависимости от режима работы летательного аппарата. На основе информации, выдаваемой системой, может быть сделано объективное заключение о том, нужно ли проводить обследование опоры шасси, ремонтировать его или оставить его в эксплуатации, что снимает необходимость в обследовании и, возможно, в расширенном анализе полетных данных, когда такие действия не требуются, и тем самым дает возможность избежать ненужных задержек и отмен рейсов летательного аппарата.
Для шарнирной опоры шасси, то есть для опоры с четырьмя колесами, из которых касание с землей приходится на два колеса с последующим наклоном вперед ходовой части для приведения в контакт с землей всех четырех колес, добавлен индикатор для установления отношения пиковых нагрузок к, соответственно, периоду времени, когда только два колеса контактируют с землей, и периоду, когда все четыре колеса находятся в надежном контакте с землей.
В широком смысле в изобретении предложена система контроля нагрузки опоры шасси летательного аппарата содержащая:
датчик давления, который при использовании расположен в демпфирующей камере основной стойки опоры шасси таким образом, что измеряет давление рабочей жидкости в основной стойке опоры шасси, причем датчик давления выдает выходной электрический сигнал, соответствующий давлению, которое он измеряет;
датчик опоры шасси для регистрации и сигнализации того, что опора шасси выпущена;
блок обработки сигнала, включенный так, чтобы получать сигналы со всех датчиков, причем после получения сигнала с датчика опоры шасси, свидетельствующего о том, что опора шасси выпущена, блок обработки сигнала при работе оценивает сигналы с датчика давления; и
выходной каскад, включенный так, чтобы получать основной выходной сигнал с блока обработки сигнала и давать представление выходного сигнала с блока обработки сигнала.
Краткое описание чертежей
Устройство контроля нагрузки шасси летательного аппарата, выполненное в соответствии с настоящим изобретением, далее будет исключительно в качестве примера описано со ссылкой на прилагаемые чертежи, на которых:
на фиг.1 схематически представлены вид спереди опоры шасси летательного аппарата, содержащей шарнирную четырехколесную ходовую часть, причем показаны передние два колеса, и устройство опорных элементов опоры шасси, содержащих основной опорный элемент, представляющий собой фактически телескопический амортизатор;
на фиг.2 схематически представлен вид сбоку на фиг.1 со снятыми передним и задним колесами, ближайшими к наблюдателю, чтобы показать балку ходовой части, расположенную между колесами;
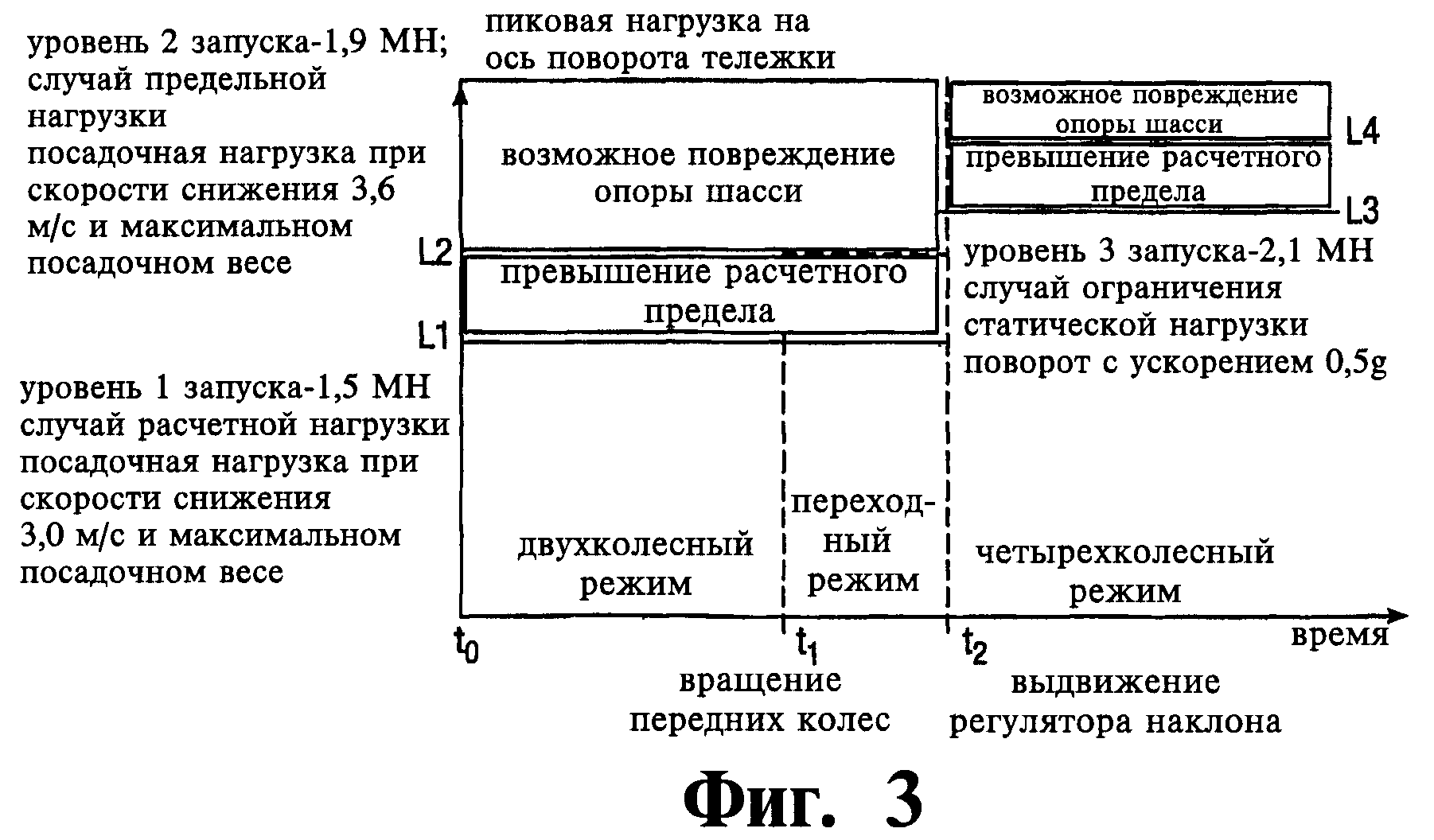
на фиг.3 схематически представлено распределение пределов нагрузки на опору шасси по времени в процессе посадки;
на фиг.4 представлена блок-схема электронной аппаратуры мониторинга нагрузки на опору шасси;
на фиг.5 детальное представление логического элемента мониторинга нагрузки электронной аппаратуры мониторинга нагрузки на опору шасси;
на фиг.6 представлена диаграмма состояний, отражающая работу электронной аппаратуры мониторинга нагрузки на опору шасси;
на фиг.7 дано графическое представление возможного изменения выходного сигнала с аппаратуры, представленной на фиг.4 или фиг.5;
на фиг.8 представлено изменение пиковой величины давления в демпфирующей камере масляного амортизатора в зависимости от пиковой величины нагрузки на ось ходовой части для периода, когда при посадке только два колеса четырехколесной тележки находятся в контакте с землей;
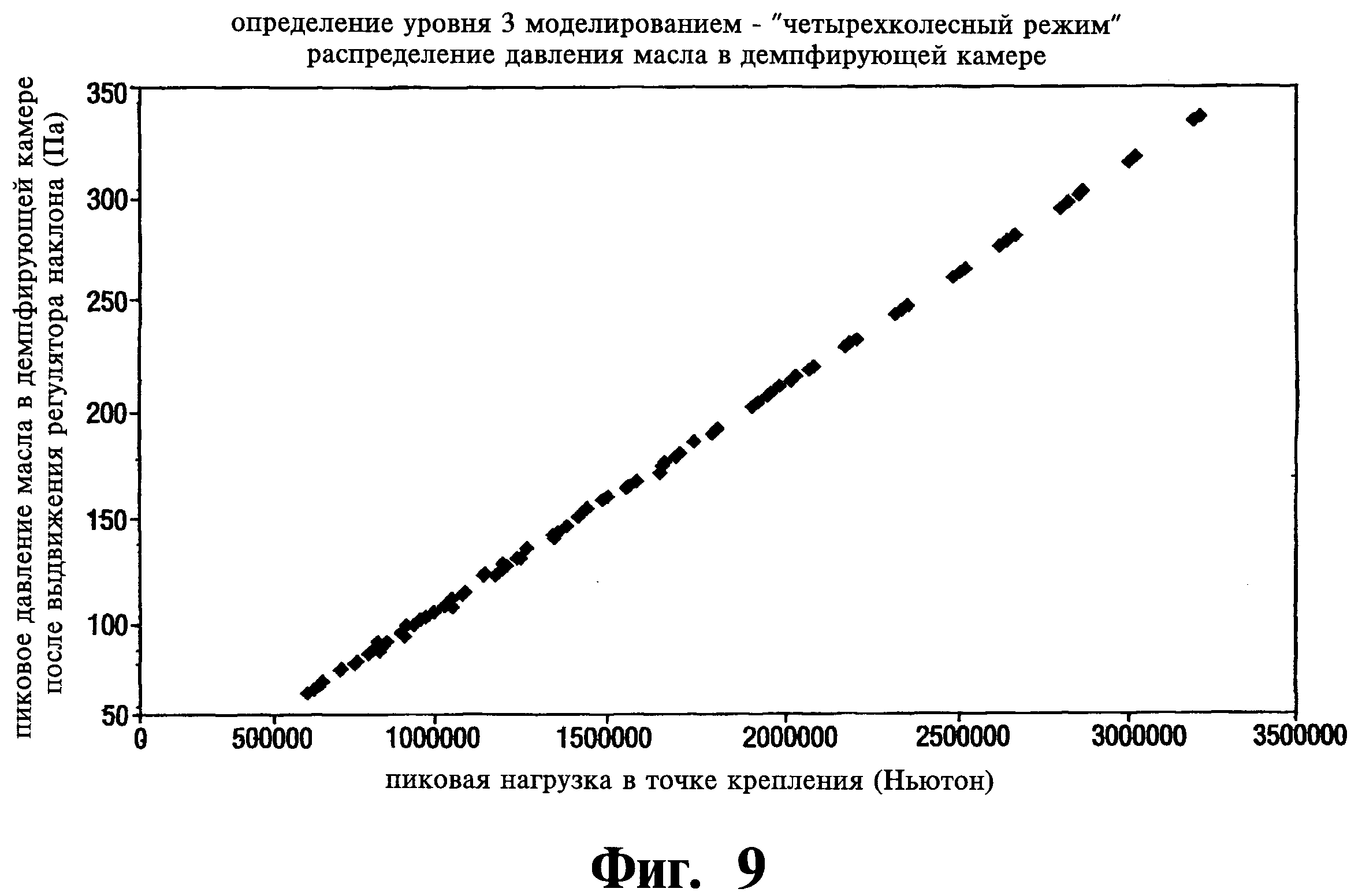
на фиг.9 представлено изменение пиковой величины давления в демпфирующей камере масляного амортизатора в зависимости от пиковой величины нагрузки в точке крепления после того, как при посадке все четыре колеса четырехколесной ходовой части придут в контакт с землей;
на фиг.10 представлен альтернативный по сравнению с фиг.7 характер изменения посадочной нагрузки в привязке к установленным пороговым значениям;
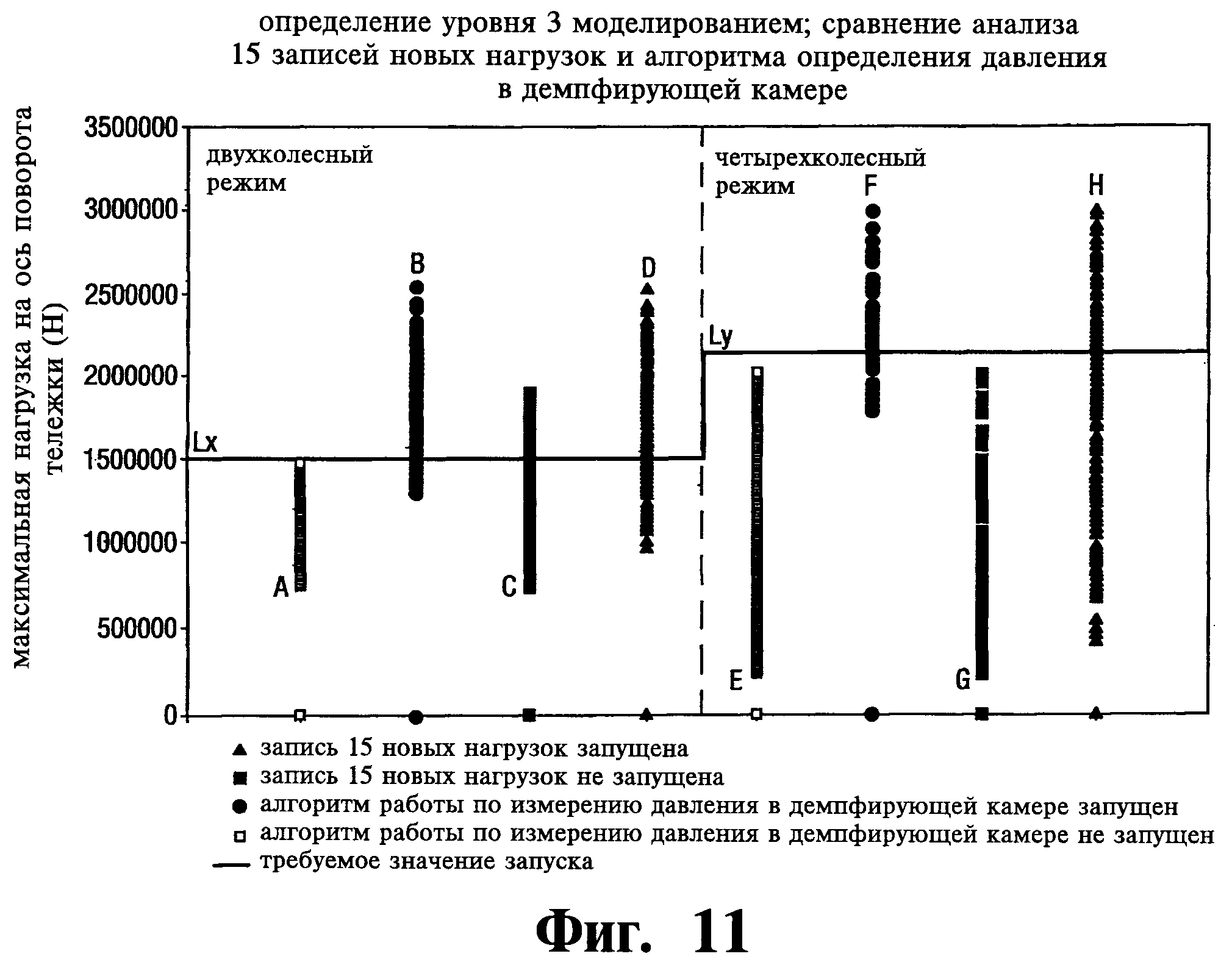
на фиг.11 графически представлены результаты, полученные с помощью устройства контроля нагрузки на опору шасси, выполненного в соответствии с настоящим изобретением, в сравнении с событиями запуска, получаемыми при моделировании скорости снижения летательного аппарата или ускорения центра тяжести летательного аппарата, возникающих при посадке.
В последующем описании первый режим работы ходовой части назван двухколесным режимом и второй режим работы ходовой части назван четырехколесным режимом.
Осуществление изобретения
На прилагаемой фиг.1 показаны два передние колеса 1а и 1b опоры шасси летательного аппарата, содержащего шарнирно соединенную четырехколесную ходовую часть, которая поворотно соединена с внутренним основным несущим элементом 2, который может перемещаться по оси внутри наружного основного несущего элемента 3. Внутренний основной несущий элемент 2 и наружный основной несущий элемент 3 образуют телескопический амортизатор, причем наружный основной несущий элемент 3 представляет собой цилиндр, закрытый с одного конца, а внутренний основной несущий элемент 2 имеет группу кольцевых уплотнений (не показаны), служащих для удержания некоторого объема рабочей жидкости 5 гидросистемы между внутренним основным несущим элементом 2 и наружным основным несущим элементом 3. Диафрагма 4, снабженная отверстием или группой отверстий, установлена в наружном основном несущем элементе 3 в том месте, где рабочая жидкость гидросистемы при проталкивании ее внутренним основным несущим элементом 2 в наружный основной несущий элемент 3 проходит через диафрагму. В наружном основном несущем элементе 3 находится некоторый объем 6 азота, служащий для создания упругого противодействия при введении с усилием внутреннего основного несущего элемента 2 в наружный основной несущий элемент 3. Во внутреннем основном несущем элементе 2 имеется позиция 7а наполнения рабочей жидкостью гидросистемы, служащая началом осевого канала 7, проходящего через внутренний основной несущий элемент 2 и дающего возможность от позиции 7а по осевому каналу 7 через внутренний основной несущий элемент 2 вводить рабочую жидкость гидросистемы в наружный основной несущий элемент 3. Позиция 7а заполнения рабочей жидкостью гидросистемы служит местом заполнения демпфирующей камеры наружного основного несущего элемента 3 и благодаря своей легкодоступности может служить для мониторинга давления масла в демпфирующей камере.
Позиция 7а наполнения рабочей жидкостью гидросистемы выполнена таким образом, что может служить каналом измерения давления масла в демпфирующей камере путем установки в этом месте соответствующего защищенного измерительного преобразователя с относительно широким диапазоном частот.
При установке такого измерительного преобразователя электрический сигнал с измерительного преобразователя давления дает значение давления масла в демпфирующей камере и используется в устройстве мониторинга давления масла в демпфирующей камере, которое, в свою очередь, служит для отображения нагрузки на опору шасси.
В качестве подходящего измерительного преобразователя давления может быть взят один из измерительных преобразователей давления с усилителем серии Druck PMP/PTX 3000, ориентированный на космическое применение.
В процессе работы амортизатора, представленного на фиг.1, азот при сжатии действует как пружина. Давление Pg азота создает основную реакцию на статическое нагружение амортизатора. В динамических условиях, когда амортизатор сжимается, рабочая жидкость гидросистемы выдавливается из амортизирующей камеры в камеру, занятую азотом, через неподвижную диафрагму 4. Поэтому при сжатии амортизатора на диафрагме 4 возникает перепад давления. Перепад давления ΔР0 пропорционален квадрату скорости V перемещения рабочей жидкости гидросистемы и может быть выражен, как
ΔР0=Kd×V2, где Kd - константа.
Тогда давление Pdc в демпфирующей камере, заполненной рабочей жидкостью гидросистемы, можно выразить, как
Pdc=Pg+ΔР0.
Давление Pdc, умноженное на площадь поперечного сечения внутреннего основного несущего элемента амортизатора, равно силе, передаваемой вертикально через основную стойку, сформированную внутренним основным несущим элементом 2 и наружным основным несущим элементом 3, за вычетом силы трения, возникающей в кольцевых уплотнениях между внутренним основным несущим элементом 2 и наружным основным несущим элементом 3. Сила трения покоя, возникающая в кольцевых уплотнениях между внутренним основным несущим элементом 2 и наружным основным несущим элементом 3, обязательно велика и поэтому передает значительную часть нагрузки на опору шасси от внутреннего основного несущего элемента 2 на наружный основной несущий элемента 3, так что наличие давления в демпфирующей камере не дает надежного отображения нагрузки на опору шасси в неподвижном положении летательного аппарата. Однако при приземлении условия переходят в динамические, при которых сила трения в кольцевых уплотнениях уменьшается до силы трения скольжения. Пиковые усилия, развиваемые в опоре шасси, имеют место при наивысших скоростях V рабочей жидкости гидросистемы, и динамические силы трения при этих скоростях малы по сравнению с силами демпфирования, определяемыми площадью отверстия. Из этого следует, что при приземлении условия работы опоры шасси таковы, что пиковое давление в демпфирующей камере является хорошим отражением пиковой нагрузки на главную стойку опоры шасси.
Приведенный анализ справедлив для любого амортизатора, содержащего жидкостно-газовую рабочую смесь, как описано выше. Нагрузка, которую испытывает амортизатор, передается на другие компоненты опоры шасси, что дает возможность определить нагрузку на выбранные компоненты или, в случае необходимости, на все компоненты. Конечно, конфигурации различных опор шасси отличаются друг от друга, и нагрузки, испытываемые компонентами, зависят от конкретной геометрии опор шасси.
На прилагаемой фиг.2, отображающей вид сбоку опоры шасси с фиг.1 со снятыми передним и задним колесами, ближними к наблюдателю, показана опора шасси, имеющая переднее колесо 1а и соответствующее ему заднее колесо 11а, а также в дополнение к элементам с 2 по 7, показанным на фиг.1, шарнирное соединение 8, регулятор 9 наклона и штангу 10 тележки, на концах которой располагаются колеса 1а и 11а.
Шарнирное соединение 8 связывает переднюю часть ходовой части с наружным основным несущим элементом 3. Когда во время полета выпускается опора шасси, шарнирное соединение 8 поддерживает ходовую часть, придавая четырехколесной ходовой части положение с поднятой передней частью при выдвинутом состоянии амортизатора, сформированного внутренним основным несущим элементом 2 и наружным основным несущим элементом 3.
Устройство опоры шасси, представленное на фиг.2, может быть названо или опорой шасси с наклоняемой ходовой частью, или шарнирной опорой шасси. При приземлении на шарнирную опору шасси прежде всего касаются земли задние колеса ходовой части, и после достаточного сжатия масляного амортизатора передние колеса также касаются земли. Состояние, при котором только два колеса находятся в контакте с землей, назовем двухколесным режимом, и состояние, при котором все четыре колеса находятся в контакте с землей назовем четырехколесным режимом. Промежуточное состояние между двухколесным и четырехколесным режимами назовем переходным режимом от двух к четырем колесам.
Шарнирное соединение 8 действует как шарнир при первоначальном касании земли, то есть в двухколесном режиме, когда только два нижних колеса находятся в контакте с землей, причем шарнирное соединение 8 находится под нагрузкой, так как масляный амортизатор сжат. В двухколесном режиме шарнирное соединение 8 испытывает растягивающую нагрузку, пропорциональную (составляющую около половины) сжимающей нагрузке, передаваемой через масляный амортизатор, при этом конкретное значение пропорции зависит от геометрии опоры шасси. Нагрузка на шарнирное соединение 8 зависит от нагрузки на ось поворота ходовой части, которая соответствует нагрузке, приложенной вертикально к нижнему концу стойки опоры шасси, где происходит поворот ходовой части, которая, в свою очередь, зависит от нагрузки на задние колеса.
Регулятор 9 наклона содержит элемент, связывающий амортизатор с передней частью ходовой части и выдвигающийся, когда ходовая часть переходит из начального состояния, при котором в контакте с землей находятся два колеса, через переходный режим в конечное состояние, при котором четыре колеса контактируют с землей. Датчик положения регулятора наклона (не показан) выполняет функцию регистрации трех фаз касания земли, причем этими тремя фазами являются следующие: только два находящихся в нижнем положении колеса контактируют с землей, два находящихся ниже колеса находятся в контакте с землей, а два находящихся выше колеса впервые прикасаются к земле, и все четыре колеса полностью контактируют с землей.
В переходном режиме нагрузка на шарнирное соединение 8 изменяется от нагрузки растяжения до нагрузки сжатия. Сразу при переходе в четырехколесный режим шарнирное соединение 8 перестает испытывать сжатие, и силы как от передних колес ходовой части, так и от задних, передаются через масляный амортизатор.
Представленная на фигурах 1 и 2 опора шасси испытывает при приземлении значительный удар, и могут быть установлены пороги, относящиеся к двухколесному режиму, переходному режиму и четырехколесному режиму соответственно, которые классифицируют характер приземления по нагрузке на опору шасси. Например, приземление может быть классифицировано как прошедшее в пределах посадочной нагрузки или как вышедшее за пределы посадочной нагрузки.
Предполагается, что для шарнирного соединения 8 расчетный предел нагрузки достигается при посадке со снижением со скоростью 10 фут/с (3,05 м/с), в то время как анализ нагрузки на опору шасси, учитывающий диапазон возможных условий приземления, показывает, что во многих случаях расчетный предел нагрузки на шарнирное соединение 8 может быть превышен при более низких скоростях снижения. Несоответствие выявляется при непосредственных измерениях нагрузки на ось тележки, которая может быть использована для определения нагрузки на другие компоненты, включая нагрузку шарнирного соединения 8, которая зависит от нагрузки на ось ходовой части.
Дополнительно опора шасси должна быть спроектирована таким образом, чтобы выдерживать приложение нескольких вариантов расчетных предельных нагрузок, одним из которых в четырехколесном режиме может быть поворот при рулении с ускорением 0,5 g. Вариант расчетной предельной нагрузки, возникающей при повороте во время руления с ускорением 0,5 g, иногда рассматривают, чтобы отобразить порог нагрузки, который с малой вероятностью может быть достигнут при некоторых других режимах, поскольку анализ нагрузки на опору шасси показывает, что расчетная предельная нагрузка, возникающая при повороте во время руления с ускорением 0,5 g, может быть превышена в четырехколесном режиме во время приземления при низкой скорости снижения и низком отношении подъемной силы к весу. Кроме того, пороговая нагрузка, эквивалентная повороту с ускорением 0,5 g в четырехколесном режиме, вполне может превысить расчетный предел нагрузки в двухколесном режиме, что потенциально может привести к повреждению шарнирного соединения, и в изобретении учитывается необходимость введения разных порогов для двухколесного и четырехколесного режимов.
На приложенной фиг.3 дано графическое отображение порогов посадочных нагрузок на опору шасси, измеренных на оси тележки и амортизаторе.
На фиг.3 отсчет времени начинается с момента касания, при котором задняя пара колес начинает испытывать нагрузку, то есть с начала двухколесного режима. Некоторое время спустя, в момент, обозначенный на фиг.3 через t1, передняя пара колес начинает испытывать нагрузку вместе с задней парой колес, что означает вступление в переходный режим от двухколесного к четырехколесному, длящийся до момента времени t2, обозначенного на фиг.3. После чего обе пары колес ходовой части остаются нагруженными, что означает переход в четырехколесный режим и приземление летательного аппарата.
Посадочная нагрузка, соответствующая уровню, обозначенному через L1, представляет собой безопасную посадочную нагрузку в течение периода между t0 t1, когда только два расположенных ниже колеса ходовой части находятся в контакте с землей, причем посадочная нагрузка L1 продолжает оставаться безопасной посадочной нагрузкой и течение периода между моментами времени t1 и t2 вплоть до момента t2, соответствующего переходу из двухколесного в четырехколесный режим, в конце которого все четыре колеса ходовой части надежно контактируют с землей. После этого, с момента t2 и далее, более высокая посадочная нагрузка, обозначенная уровнем L3, становится пределом безопасной посадочной нагрузки, причем все четыре колеса ходовой части находятся в полном контакте с землей. Область, ограниченная координатами L1, t0 и t2, а также область далее t2, ограниченная уровнем L3, представляет собой область безопасной работы опоры шасси.
Посадочная нагрузка, превышающая уровень L1, равный, например, 1,5 МН (меганьютон), и лежащая ниже уровня, обозначенного через L2 и равного, например, 1,9 МН, представляет собой посадочную нагрузку, превышающую порог безопасной посадочной нагрузки в период между моментами t0 и t2, и аналогично посадочная нагрузка, превышающая уровень, обозначенный через L3 и равный, например, 2,14 МН, но лежащая ниже уровня, обозначенного через L4, представляет собой посадочную нагрузку, превышающую порог безопасной посадочной нагрузки в период времени, лежащий за моментом t2, когда все четыре колеса приходят в полный контакт с землей. Посадочные нагрузки, превышающие уровень L2 в течение периода между моментами t0и t2 и уровень L4 после момента t2, значительно превосходят пороги безопасных посадочных нагрузок и должны, вероятно, привести к повреждению опоры шасси.
На прилагаемой фиг.4 можно видеть, что электронная аппаратура мониторинга нагрузки на опору шасси представлена блоком 42, содержащим первый входной канал 44, второй входной канал 45, третий входной канал 46 и выходной канал 47. На первый входной канал 44 электронной аппаратуры 42 должен поступать сигнал, отражающий то, что опора шасси находится в состоянии, соответствующем промежутку времени между t0 и t2 или времени после t2, показанном на фиг.3. На второй входной канал 45 электронной аппаратуры 42 должен поступать электрический сигнал, отражающий величину давления масла в демпфирующей камере амортизатора, а на третий входной канал 46 должен поступать электрический сигнал, отражающий выпущенное или убранное положение опоры шасси. На свой выходной канал 47 электронная аппаратура 42 выдает выходной сигнал, отражающий максимальную нагрузку на опору шасси, за периоды, определяемые соответствующими режимами работы опоры шасси. Выходной сигнал показывает, что нагрузка на опору шасси находится ниже уровня L1 с фиг.3 в течение времени перед моментом t2 и ниже уровня L3 после момента времени t2 с фиг.3 или же наоборот в другом состоянии по отношению к уровням L1 и L3 с фиг.3.
Сигналы, требуемые для первого 44 и второго 45 входных каналов, поступают с опоры шасси. Сигнал, требуемый для первого входного канала 44, вырабатывается путем регистрации положения регулятора 9 наклона, изображенного на фиг.2, и отображает нахождение опоры шасси в одном из трех режимов работы, упомянутых выше. Сигнал, требуемый для второго входного канала 45, вырабатывается измерительным преобразователем давления масла, дающим индикацию давления масла в демпфирующей камере, как рассмотрено выше. Сигнал на третий входной канал 46 поступает с системы 41 выпуска и уборки шасси и отражает выпущенное или убранное состояние опоры шасси. Сигнал с выходного канала 47 поступает на устройство 43 отображения, расположенное в кабине летательного аппарата. Кроме того, сигнал с выходного канала 47 может быть передан на другое или другие устройства, включающие, например, средства регистрации данных.
Входные сигналы включают сигнал, отображающий режим работы колес, и сигнал, отображающий давление масла в демпфирующей камере. Введенная связь с системой выпуска и уборки шасси позволяет проводить самоконтроль и получать информацию о полетных циклах. Выходной сигнал поступает в систему регистрации и отображения эксплуатационных параметров и выдает маркеры, соответствующие превышению установленных порогов нагрузки, по которым могут быть предприняты соответствующие действия, включая, например, запрещение вылета и осмотр летательного аппарата или его возвращение на сервисное обслуживание. Маркеры ошибки введены для того, чтобы показывать обнаружение аппаратурой мониторинга нагрузки нарушений или наличие ошибки в самой системе при проведении самоконтроля, что дает информацию в систему регистрации эксплуатационных параметров о наличии неисправности и необходимости ремонтных действий. Решение о необходимости наземного осмотра или ремонта летательного аппарата принимается системой регистрации эксплуатационных параметров вне зависимости от записи результатов Анализа Летных Данных.
Электронная аппаратура мониторинга эффективно контролирует нагрузку на опору шасси непосредственно путем измерения давления масла в демпфирующей камере и работает независимо от основных переменных величин, влияющих на нагрузку на опору шасси, таких, например, как руление, отношение подъемной силы к весу, масса и скорость снижения летательного аппарата. При превышении порога, установленного в соответствии с фиг.3, возможна поломка опоры шасси и полет должен быть запрещен до тех пор, пока не будут предприняты соответствующие ремонтные операции. Если ни один из порогов не превышен, то повреждение опоры шасси маловероятно, и летательный аппарат готов к продолжению эксплуатации.
Электронная аппаратура мониторинга действует с дискретностью замеров примерно 20 миллисекунд, чтобы была уверенность в том, что будет захвачен момент пиковых нагрузок, и производит также измерение падения давления путем:
контроля давления рабочей жидкости опоры шасси при заходе на посадку, выдавая при необходимости сигнал о неисправности и продолжая проводить измерение давления,
регистрации того, что пиковое давление рабочей жидкости опоры шасси превышает давление, соответствующее полностью выпущенной перед посадкой опоре шасси, выдавая при необходимости сигнал о неисправности.
Кроме того, электронная аппаратура мониторинга контролирует следующее:
отсутствие индикации двухколесного режима, что может привести к установке слишком высокого порога и, следовательно, ошибке при индикации повреждения;
отсутствие индикации четырехколесного режима, и если это неопределенно, то тогда устанавливают более низкие пороги двухколесного режима;
отсутствие питания или результатов компьютерной обработки.
Регистрируются посадки с подпрыгиванием, и в аппаратуру вводится информация о завершении цикла приземления для ведения регистрации. Для контроля циклов посадки аппаратура осуществляет мониторинг выпуска и уборки опоры шасси, но мониторинг проводится всегда вне зависимости от того, выпущена или убрана опора шасси, чтобы была уверенность в том, что самая последняя посадка зарегистрирована.
На прилагаемой фиг.5 можно видеть, что логический элемент мониторинга нагрузки электронной аппаратуры с фиг.4 содержит фильтр 51, пиковый детектор 52, первую таблицу 53 соответствия, вторую таблицу 55 соответствия, логический блок 54 установок, первый пороговый компаратор 56, второй пороговый компаратор 57 и выходную интерфейсную схему 58. Логический блок 54 уставок получает сигналы по первому входному каналу 44, отражающие стадию приземления в привязке к моментам времени t0, t1 и t2с фиг.3. Входной сигнал по дополнительному входному каналу 59, поступающий с внутреннего логического блока 64 ошибки, устанавливает пороги для двухколесного режима. Выходной сигнал с логического блока 54 уставок поступает на пиковый детектор 52, на который поступает также и прошедший через фильтр 51 сигнал, представляющий давление масла в амортизаторе демпфирующей камеры. Пиковый детектор 52 выдает первый выходной сигнал, который вводится в первую таблицу 53 соответствия и отражает пиковую нагрузку за период между моментами времени с t0 по t2 на фиг.3. Пиковый детектор 52 также выдает второй выходной сигнал, который вводится во вторую таблицу 55 соответствия и отражает пиковую нагрузку за период после момента времени t2 с фиг.3. Выходной сигнал с первой таблицы 53 соответствия поступает на первый пороговый компаратор 56, и выходной сигнал с второй таблицы 55 соответствия поступает на второй пороговый компаратор. Первый выходной сигнал с первого порогового компаратора 56 и второй выходной сигнал с второго порогового компаратора 57 поступают на выходную интерфейсную схему 58, подающую выходной сигнал на выходной канал 47.
В процессе работы логического элемента мониторинга нагрузки, представленного на фиг.5, фильтр 51 снижает высокочастотные шумы (выше 100 Гц), которые могут присутствовать в сигнале, отражающем давление масла в демпфирующей камере амортизатора. Логический блок 54 установок работает таким образом, что обеспечивает захват пиковым детектором 52 электрических сигналов, получаемых при пиковых значениях давления масла за соответствующие периоды между отображенными на фиг.3 моментами времени t0 и t2 и после t2. Первая таблица 53 соответствия используется для преобразования выходных сигналов с пикового детектора 52 в значения нагрузки на ось поворота, возникающей за период между t0 и t2, в то время как вторая таблица 55 соответствия используется для преобразования выходных сигналов с пикового детектора 52 в значения нагрузки на ось поворота, возникающей после момента времени t2.
Выходные сигналы с первой таблицы 53 соответствия поступают на первый пороговый компаратор 56, реагирующий на сигналы, соответствующие уровням нагрузки L1 и L2 с фиг.3, и выдающий выходной сигнал, показывающий соответствует ли входной сигнал нагрузке, лежащей ниже L1, между L1 и L2 или выше L2. Выходные сигналы с второй таблицы 57 соответствия поступают на второй пороговый компаратор 57, реагирующий на сигналы, соответствующие уровням нагрузки L1 и L3 с фиг.3, и выдающий выходной сигнал, показывающий, соответствует ли входной сигнал нагрузке, лежащей ниже L3, между L3 и L4 или выше L4. Выходные сигналы с первого компаратора 56 и второго компаратора 57 подаются на выходную интерфейсную схему 58, выдающую выходной сигнал, отображающий, если это имеет место, какой из пределов нагрузки L1, L2, L3 или L4 превышен за периоды времени между t0 и t2 и после t2, показанные на фиг.3.
При работе аппаратуры значение пикового давления масла в демпфирующей камере, например на позиции 7а заполнения маслом с фиг.1, преобразуется в электрический сигнал с помощью пригодного для этой цели измерительного преобразователя давления рабочей жидкости в электрический сигнал, и значения пикового давления масла в демпфирующей камере и пиковой нагрузки на ось поворота тележки представляются соответствующими значениями в первой таблице 53 соответствия с фиг.5, причем выходные сигналы с первой таблицы 53 соответствия представляют собой сохраненные значения пиковой нагрузки на ось поворота тележки, соответствующие входным сигналам, отражающим пиковое давление масла в демпфирующей камере во время двухколесного режима.
Преобразованное в электрический сигнал значение пикового давления масла в демпфирующей камере и значения пикового давления масла в демпфирующей камере и пиковой нагрузки в точке крепления представляются соответствующими значениями во второй таблице 55 соответствия с фиг.5, причем выходные сигналы с второй таблицы 55 соответствия представляют собой сохраненные значения пиковой нагрузки в точке крепления, соответствующие входным сигналам, отражающим пиковые значения масла в демпфирующей камере во время четырехколесного режима.
Сигнал с измерительного преобразователя, связанного с датчиком давления рабочей жидкости в демпфирующей камере, снимается каждые 20 миллисекунд так же, как сигнал, показывающий режим работы, и логические операции выполняются со скоростью, соответствующей 20 миллисекундному периоду снятия показаний. Фильтр 51 снижает высокочастотные шумы, которыми являются шумы с частотой выше 100 Гц. Пиковый детектор 52 захватывает наибольшее значение давления в демпфирующей камере за время двухколесного режима, обозначенное как Pdc2W, и наибольшее значение давления за время четырехколесного режима, обозначенное как Pdc4W. Захваченные значения преобразуются в пиковые нагрузки и сравниваются с набором уровней запуска. Блок 54 обеспечивает то, что захвачены пиковые значения давления, связанные с двухколесным и четырехколесным режимами, и что в случае отсутствия индикации двухколесного режима аппаратура выполнит двухколесный цикл работы во время посадки. Первая таблица 53 соответствия выдает значение нагрузки на ось поворота тележки, с которой может быть сравнен расчетный предел для двухколесного режима, и вторая таблица 55 соответствия выдает соответствующее значение для четырехколесного режима. Аналогичные таблицы соответствия или алгоритмы могут быть введены и для других компонентов опоры шасси, таких как шарнирное соединение.
Мониторинг в четырехколесном режиме продолжается до начала цикла уборки опоры шасси. Аппаратура также регистрирует поведение вертикальной нагрузки и, следовательно, возникновение нагрузки, превышающей допустимую нагрузку, во время наземного маневрирования. В случае посадки с подскоками мониторинг переключается от двухколесного к четырехколесному режиму и в случае необходимости обратно, при этом мониторинг наивысших значений для этих режимов продолжается вне зависимости от последовательности таких переключений.
Блок 54 обеспечивает обновление значения Pdc2W только во время двухколесного режима и сохранение его при четырехколесном режиме. Значение Pdc4W также обновляется только при четырехколесном режиме, при этом Pdc2W сохраняется. Значения маркеров ошибки сохраняются в энергонезависимой памяти и переустанавливаются только при уборке опоры шасси, определяемой системой уборки и выпуска шасси.
На фиг.6 представлен алгоритм работы аппаратуры мониторинга, изображенной на фиг.4. Представленный на фиг.5 логический элемент мониторинга, продолжающий выполнять свои действия каждые 20 миллисекунд вне зависимости оттого, какая рабочая операция выполняется, способствует выполнению функций, представленных на фиг.6 элементом 66. Два процесса, мониторинга и обнаружения ошибки, должны рассматриваться как действующие параллельно. Рабочие состояния позволяют идентифицировать события и подтвердить работу основных входных каналов.
Алгоритм работы предусматривает проверку на операции Test 1 (состояние 62) того, что входной канал двух-, четырехколесного режимов показывает двухколесный режим при заходе на посадку с выпущенным шасси. При отсутствии ответа по истечении пяти секунд вырабатывается маркер ошибки (действие 64). При выполнении операции Test 2 (состояние 63) проводится мониторинг давления в демпфирующей камере при выпущенной опоре шасси во время захода на посадку, что то же самое, что и скачок давления в начале кривой, и в случае выхода результатов измерения за допустимые пределы выдается информация об ошибке (действие 65), но мониторинг продолжается (действие 66), так как причиной ошибки может быть неправильное определение. Собранные пиковые значения и маркеры ошибки сохраняются в энергонезависимой памяти (действие 68) и не теряются при отключении питания. Понятие события означает величины пиковых нагрузок и значения маркеров ошибки в это время, а под записью событий понимается история последних десяти событий. Ошибка во взаимосвязи между выпуском и уборкой опор шасси (действие 67) могла бы обнаруживаться аппаратным путем или по перерыву, например, продолжительностью в десять часов при работе в этом режиме. При подаче питания на аппаратуру мониторинга нужно привести ее в состояние между двухколесным и четырехколесным режимами и использовать указатель полета или нахождения на земле для инициализации аппаратуры мониторинга в состоянии с убранным шасси (состояние 61) и проведения мониторинга.
На операции Test 1 алгоритм предусматривает, что после выпуска опоры шасси с указателя поступает корректная индикация о протекании или двухколесного режима, или четырехколесного режима. Если индикация некорректна, устанавливается маркер ошибки для предупреждения о невозможности отобразить двухколесный режим работы. Этот маркер используется для того, чтобы выдать команду на то, чтобы в логических операциях при мониторинге всегда принималось проведение работы в двухколесном режиме. На операции Test 2 проводится контроль расчетного давления в демпфирующей камере и в случае ошибки при проведении контроля делается заключение или об ошибке во входных каналах измерения давления, или о том, что опора шасси была неправильно подготовлена. Снова выставляется маркер ошибки и мониторинг продолжается, так как даже в случае неправильной подготовки опоры шасси аппаратура мониторинга даст правильную информацию о пиковых нагрузках, приходящихся на опору шасси во время посадки. Может быть проведен дополнительный контроль, чтобы убедиться в правильности связи между системой выпуска и уборки шасси и аппаратурой мониторинга и избежать зависания аппаратуры в одном из состояний.
На приложенной фиг.7 на верхнем графике представлена зависимость от времени при посадке нагрузки на поворотной стойке для четырехколесной наклоняемой тележки, обозначенной через Fb-Fbb-Fcc-Fc, и нагрузки в точке крепления, обозначенной через Fa1-Fa2-Fcc-Fc. На нижнем графике представлены значения давления масла в демпфирующей камере одноступенчатого амортизатора при посадке, обозначенные через Pb-Pbb-Pcc-Pc и взятые в том же временном масштабе, что и на верхнем графике, для четырехколесной наклоняемой ходовой части.
Величина нагрузки Fb на поворотной стойке ходовой части растет от нуля и имеет первый максимум вблизи значения Fbb, после которого падает и затем растет до второго максимума вблизи значения Fcc, после которого снова падает. Величина давления Pb масла в демпфирующей камере изменяется аналогично изменению нагрузки на поворотную стойку ходовой части, возрастая до первого максимума вблизи значения Pbb, после чего падая и затем снова возрастая до второго максимума вблизи значения Pcc, после чего снова падая.
С другой стороны, величина нагрузки Fa1 в точке крепления растет более или менее равномерно и затем снижается, после чего снова растет от значения Fa2 до максимума вблизи значения Fcc нагрузки на поворотную стойку ходовой части, после чего совпадает с нагрузкой Fc на поворотную стойку ходовой части.
Наличие двух максимумов на верхнем графике показывает, что четырехколесная наклоняемая ходовая часть при первоначальном касании работает в двухколесном режиме и затем переходит в четырехколесный режим работы. На верхнем графике первый максимум с величиной примерно Fbb имеет место при двухколесном режиме работы опоры шасси, и второй максимум с величиной примерно Fcc имеет место при четырехколесном режиме работы. В представленном на фиг.7 примере первый максимум превосходит по величине второй максимум, что происходит не всегда, и второй максимум может превосходить по величине первый.
Нагрузка в точке крепления при двухколесном режиме существенно ниже нагрузки в точке поворота в двухколесном режиме, так как шарнирное соединение 8 с фиг.2 действует как рычаг с соотношением плеч 2:1, что заложено в геометрию опоры шасси. В следующем за этим четырехколесном режиме нагрузка в точке крепления и нагрузка на ось поворота ходовой части равны друг другу, так как в это время шарнирное соединение не оказывает влияния на нагрузку.
Представленная на фиг.7 информация свидетельствует о том, что для четырехколесной наклоняемой ходовой части изменение давления масла в демпфирующей камере близко совпадает с изменением нагрузки на поворотную стойку ходовой части при условии, что двухколесный и четырехколесный режимы признаны двумя отдельными режимами работы. Кроме того, очевидно, что в самом четырехколесном режиме нагрузка в точке крепления в основном такая же, как нагрузка на поворотную стойку ходовой части.
Представленные на фиг.7 результаты относятся к симметричным условиям посадки, когда подъемная сила летательного аппарата равна его весу. Наличие второго максимума в четырехколесном режиме связано с тем, что после поворота ходовой части при переводе ее из двухколесного в четырехколесный режим все же остается энергия, которую нужно погасить. Первый максимум, соответствующий двухколесному режиму, чувствителен к скорости снижения, в то время как второй максимум возрастает по величине, в основном с уменьшением отношения подъемной силы к весу. Более того, оба максимума чувствительны к угловой скорости крена в момент приземления, вследствие чего конкретная угловая скорость крена при посадке в сочетании с уменьшенной скоростью снижения по сравнению с предусмотренными Общими нормами летной годности расчетными ограничениями могут привести на практике к нагрузкам, превосходящим расчетные пределы.
На фиг.7 область между двумя максимумами соответствует переходному режиму, обозначенному промежутком между моментами времени t1 и t2, когда ходовая часть переходит из двухколесного режима в четырехколесный.
Как видно на приложенной фиг.8, соотношение между пиковой нагрузкой на ось поворота ходовой части и пиковым давлением масла в демпфирующей камере близко к линейному. В соответствии с фиг.8 пиковое давление масла в демпфирующей камере в функции от пиковой нагрузки на ось поворота ходовой части показано для периода времени между моментами t0 и t2, показанными на фиг.3, то есть для двухколесного режима. Заметные отклонения от строгой линейности связаны с эффектами трения при боковых нагрузках, возникающих при сжатии амортизатора. Однако, как представляется, силы трения не оказывают существенного влияния на форму кривой на фиг.8 в принципе из-за того, что пиковые нагрузки возникают, когда внутренний основной несущий элемент 2 скользит внутри наружного основного несущего элемента 3, и в таких условиях, в основном, ошибка, связанная с трением покоя и влияющая на форму кривой, отсутствует. Соотношение, показанное на фиг.8, остается удовлетворительным при различных скоростях приземления и свидетельствует о том, что отсутствуют значительные изменения в пиковых нагрузках, связанные с изменением лобового сопротивления.
В соответствии с приложенной фиг.9 пиковое давление масла в демпфирующей камере в функции от пиковой нагрузки в точке крепления показано для периода времени после момента t2, показанного на фиг.3, то есть для четырехколесного режима. В четырехколесном режиме, как показано на фиг.7, пиковая нагрузка на ось поворота ходовой части и пиковая нагрузка в точке крепления в основном одинаковы, из чего следует, что соотношение, представленное на фиг.9, является также соотношением между пиковым давлением масла в демпфирующей камере и пиковой нагрузкой на ось поворота ходовой части.
Представленная на фигурах с 7 по 9 информация свидетельствует о том, что имеется жесткая связь между пиковым давлением масла в демпфирующей камере и пиковой нагрузкой на ось поворота ходовой части, направленной по оси амортизатора. Приблизительное значение пиковой нагрузки в точке крепления и нагрузки на шарнирное соединение в двухколесном режиме могут быть получены из пиковой нагрузки на ось поворота ходовой части с учетом геометрии опоры шасси.
На приложенной фиг.10 представлен график, отражающий изменение значений нагрузки на ось поворота стойки ходовой части Fb-Fcc в процессе посадки за период времени между моментами t0 и t2 и после t2, причем одновременно показаны значения пределов нагрузки L1, L2, L3 и L4, определенные на фиг.3. График на фиг.10 имеет такой же вид, как график на фиг.7, но относится к разным режимам посадки.
На фиг.10 представлен пример посадочной нагрузки в условиях, когда скорость снижения такова, что нагрузка на опору шасси в момент приземления остается ниже L2, что приводит к неповреждающей нагрузке в двухколесном режиме, но все же пиковая нагрузка, возникающая в четырехколесном режиме, намного больше и фактически превышает установленный предел L3 для разворота с ускорением 0,5 g.
На фиг.10 обозначенные пределы представляют собой:
пиковую нагрузку на ось поворота ходовой части L1>1,5 МН, соответствующую скорости снижения, равной 10 фут/сек (3,05 м/с), при максимальном посадочном весе и при подъемной силе, равной весу;
пиковую нагрузку на ось поворота ходовой части L2>1,9 МН, соответствующую скорости снижения, равной 12 фут/сек (3,66 м/с), при максимальном посадочном весе, симметрично распределенном, и при подъемной силе, равной весу;
пиковую нагрузку в точке крепления L3>2,14 МН, соответствующую случаю ограничения статической нагрузки при развороте с ускорением 0,5 g.
Значения пределов нагрузки L1 и L2 относятся только к двухколесному режиму. Значение предела нагрузки L3 служит для выработки предупреждения в случае, если предел статической нагрузки для разворота с ускорением 0,5 g в динамике превышен в результате сочетания факторов, включающих, например, возможное сочетание посадки с несимметричной нагрузкой, посадку с подпрыгиванием и низкое отношение подъемной силы к весу. Значение предела нагрузки L3 относится только к четырехколесному режиму, при этом нагрузка в точке крепления такая же, как нагрузка на ось поворота тележки для этого случая, что можно видеть на фиг.7.
На приложенной фиг.11 графически представлены результаты, полученные по компьютерным моделям, представляющим, соответственно, устройство мониторинга нагрузки на опору шасси (столбцы А, В, Е и F) и события запуска (столбцы С, D, G и Н). Столбец А представляет случаи, в которых устройство контроля нагрузки опоры шасси при двухколесном режиме. В отношении столбца А, отражающего случаи отсутствия запуска устройства контроля нагрузки опоры шасси, можно сказать, что все нагрузки были бы ниже установленного порога Lx.
Столбец В представляет случаи, в которых система (устройство) контроля нагрузки опоры шасси была запущена, для диапазона нагрузок на опору шасси, находящуюся в двухколесном режиме. В отношении столбца В можно сказать, что устройство контроля нагрузок опоры шасси было запущено для всех нагрузок, превышающих установленный порог Lx, и некоторых нагрузок, находящихся непосредственно ниже установленного порога Lx. Запуск устройства контроля нагрузки опоры шасси выглядит безопасным, так как все нагрузки, превышающие установленный порог Lx, были обнаружены. Запуск устройства контроля нагрузки опоры шасси нагрузками, лежащими ниже установленного порога Lx, является некорректной реакцией.
Следует отметить, что запуск системы контроля нагрузки опоры шасси, представленный столбцами А и В, таков, что все состояния с избыточной нагрузкой зарегистрированы, и имеется небольшая область нагрузок, лежащих непосредственно ниже установленного порога Lx, в которой происходит некорректный запуск.
Столбец С представляет случаи, в которых не был запущен Анализ Летных Данных, для диапазона нагрузок на опору шасси, находящуюся в двухколесном режиме. Что касается событий запуска, то можно отметить, что имеются сбои, представленные частью столбца С, лежащей выше установленного порога Lx, при которых регистрируются нагрузки выше установленного порога Lx. Эти сбои в регистрации выглядят, как лежащие на небезопасной стороне некорректных записей (основанных на выбранных порогах для этого вида моделирования), так как не регистрируются случаи нагрузок, превышающих установленный порог.
Столбец D представляет случаи, в которых был запущен Анализ Летных Данных для диапазона нагрузок на опору шасси, находящуюся в двухколесном режиме. Нагрузки, превышающие установленный порог Lx, зарегистрированы, но вместе с тем это привело к значительному числу ложных записей о избыточных нагрузках, в то время как нагрузки были немного ниже, а также значительно ниже установленного порога Lx.
Заметим, что в событиях запуска, представленных столбцами С и D, зарегистрированы не все состояния с избыточной нагрузкой, и существует значительный диапазон нагрузок, лежащих ниже установленного порога, при которых происходит некорректная регистрация.
Столбец Е представляет случаи, в которых устройство контроля нагрузки опоры шасси не был запущен, для диапазона нагрузок на опору шасси, находящуюся, как определено устройством мониторинга нагрузки на опору шасси, в четырехколесном режиме. В отношении столбца Е, отражающего состояние отсутствия запуска монитора опоры шасси, можно сказать, что все нагрузки были ниже установленного порога Ly.
Столбец F представляет случаи, в которых устройство контроля нагрузки опоры шасси было запущено, для диапазона нагрузок на опору шасси, находящуюся в четырехколесном режиме. В отношении столбца F можно сказать, что устройство контроля нагрузок на опору шасси было запущено для всех нагрузок, превышающих установленный порог Ly, и некоторых нагрузок, находящихся непосредственно ниже установленного порога Ly. Запуск заявляемого устройства выглядит безопасным, так как все нагрузки, превышающие установленный порог Ly, обнаружены. Запуск устройства контроля нагрузок опоры шасси некоторыми нагрузками, лежащими ниже установленного порога Ly, является некорректной реакцией и выглядит как находящийся на безопасной стороне по отношению к некорректному запуску.
Столбец G представляет случай, в котором не был запущен Анализ Летных Данных, для диапазона нагрузок на опору шасси, находящуюся в четырехколесном режиме. Что касается событий запуска, то можно отметить, что отсутствуют сбои (ни одна из частей столбца G не лежит выше установленного порога Ly), при которых регистрируются некоторые нагрузки, лежащие выше установленного порога Ly. В отношении событий запуска, представленных столбцом G, можно сказать, что результаты сопоставимы с результатами мониторинга нагрузок на опору шасси в том, что все нагрузки, лежащие ниже установленного порога Ly, проигнорированы.
Столбец Н представляет случаи, в которых был запущен Анализ Летных Данных для диапазона нагрузок на опору шасси, находящуюся в четырехколесном режиме. Нагрузки, превышающие установленный порог Ly, зарегистрированы, но вместе с тем это привело к значительному числу ложных записей об избыточных нагрузках, в то время как нагрузки немного ниже, а также значительно ниже установленного порога Ly.
События запуска не отличаются для двухколесного и четырехколесного режимов, и очевидно, что, как представлено частью столбца С, находящейся выше установленного порога Lx, можно ожидать появления событий запуска, в которых происходит сбой регистрации случаев, при которых превышен порог безопасной нагрузки. Как представлено столбцом Н, можно ожидать появления событий запуска, в которых регистрируется значительное число случаев превышения порога посадочной нагрузки, хотя посадочные нагрузки находятся ниже установленного порога.
Событие запуска, в котором произошел сбой регистрации превышения установленного порога, как представлено столбцом С, является поводом для их рассмотрения с точки зрения безопасности. В значительном числе случаев события запуска, отражающие превышение установленного порога, не являлись превышением установленного порога, как представлено столбцом Н, что влечет за собой проведение необязательных ремонтных операций, запреты на вылет летательного аппарата и соответствующие финансовые штрафные санкции.
Наоборот, система контроля нагрузок на опору шасси регистрирует все случаи превышения установленного порога нагрузки, как представлено столбцами В и F, при малом числе индикаций превышения установленного порога нагрузки и при отсутствии такого превышения, как представлено столбцами В и F.
Система контроля нагрузки на опору шасси быстро и надежно дает решение проблемы выявления жесткой посадки при эксплуатации летательного аппарата. Конечно, требуется по системе контроля на каждую опору шасси.
В отношении использования контроля опоры шасси для шарнирных опор шасси можно сказать, что путем регистрации работы ходовой части в двухколесном режиме или четырехколесном режиме, устанавливаются соответствующие пороги для каждого из двух режимов и проводится мониторинг пиковых посадочных нагрузок для двух режимов раздельно. Способ мониторинга эффективен как непосредственное измерение нагрузки через контроль давления в демпфирующей камере и независим от основных изменений в режиме посадки, включая, например, руление, отношение подъемной силы к весу, массу и скорость снижения. При превышении установленного порога возникает потенциальная возможность повреждения опоры шасси, и летательный аппарат должен оставаться на земле, пока не будут предприняты соответствующие ремонтные действия. При отсутствии превышения установленного порога есть вероятность, что опора шасси не будет испытывать повреждающих вертикальных нагрузок.
Рассмотренная выше система мониторинга опоры шасси обладает следующими свойствами:
выдача решения о взлете или запрете взлета по состоянию опоры шасси после события запуска или после жесткой посадки;
непосредственное измерение при посадке пиковой нагрузки на каждую из опор, так как устройство контроля нагрузки опоры шасси работает с каждой из опор;
отдельное измерение нагрузок и установка порогов для двухколесного и четырехколесного режимов посадки в приложении к различным компонентам опоры шасси;
работа таким образом, что ни один одиночный сбой не приведет к ошибочной индикации отсутствия повреждения опоры шасси;
сервисный контроль давления азота;
предупреждение о превышении порога вертикальной нагрузкой при наземном маневрировании;
возможность интеграции с системой выпуска/уборки шасси или усовершенствованной системой мониторинга давления в масляном амортизаторе.
Можно также добавить следующие свойства:
регистрация и сохранение истории возникновения пиковых нагрузок при посадке;
регистрация и сохранение случаев превышения нижних одного из двух установленных порогов;
интеграция в общую систему АТА 32 контроля рабочего состояния оборудования.
Приведенное выше описание относится к четырехколесной опоре с наклоняемой ходовой частью, содержащей одноступенчатый масляный амортизатор, имеющий вход в демпфирующую камеру, служащий для мониторинга давления в демпфирующей камере.
Опоры шасси другого типа имеют четырехколесную бесшарнирную тележку, в которой отсутствует шарнирное соединение. Можно ожидать, что в опоре шасси такого типа сжатие масляного амортизатора в двухколесном режиме будет мало и зависит от силы реакции регулятора наклона. Можно ожидать, что логическое устройство с фиг.5 будет пригодно для использования в одноступенчатом масляном амортизаторе, возможно, с небольшими изменениями, зависящими от конкретного вида опоры шасси.
Для опоры шасси, имеющей только два колеса, например для носовой опоры большого летательного аппарата или, возможно, для основной опоры малого летательного аппарата, и содержащей одноступенчатый масляный амортизатор, нет необходимости в мониторинге режимов работы колес, так как четырехколесный режим отсутствует, и пиковое давление в демпфирующей камере соответствует максимальной нагрузке на опору. Такой вид опоры известен, в основном, как двухколесная опора с одноступенчатым амортизатором.
Для альтернативного вида носовой опоры, например, имеющей двухступенчатый масляный амортизатор, опять же нет необходимости в мониторинге режимов колес, но требуется специфическое размещение, дающее доступ к демпфирующей камере для измерения в ней давления, так как имеется более одной демпфирующей камеры и эти камеры не обеспечивают непосредственного доступа к ним. Такой вид опоры известен, в основном, как двухколесная опора с двухступенчатым амортизатором.
Раскрытая здесь система контроля нагрузки опоры шасси не рассматривается как замена Анализу Летных Данных и скорее должно этот анализ дополнять сведениями, дающими возможность более точной оценки состояния опоры шасси после посадки.
Реферат
Изобретение относится к системе и способу контроля нагрузки опоры шасси летательного аппарата. Система контроля нагрузки содержит датчик давления, первый датчик опоры шасси, второй датчик опоры шасси, третий датчик опоры шасси, блок обработки сигнала для получения сигналов со всех датчиков опоры шасси. Способ включает измерение давления рабочей жидкости гидросистемы в основной стойке опоры шасси, определение выходного электрического сигнала, формирование сообщения о выпуске опоры шасси, определение положения ходовой части по полету, фиксирование первого и второго режимов работы, измерение давления рабочей жидкости гидросистемы на первом и втором режимах, формирование выходного сигнала о результате измерений. Опора летательного аппарата включает систему контроля нагрузки. Летательный аппарат содержит систему контроля нагрузки. Технический результат заключается в повышении точности контроля нагрузки опоры шасси летательного аппарата. 4 н. и 16 з.п. ф-лы, 11 ил.
Комментарии