Wim датчик с электроакустическими преобразователями - RU2750091C1
Код документа: RU2750091C1
Чертежи



Описание
Область техники
Изобретение касается WIM датчика с электроакустическими преобразователями для вычисления общей нагрузки транспортного средства.
Уровень техники
Системы измерения веса в движении - Weigh-in-Motion (WIM) системы применяются в транспортной области, чтобы вычислять общую нагрузку или осевую нагрузку транспортного средства; или чтобы вычислять число проездов осей или транспортных средств по участку дорожного полотна. При этом WIM система состоит, по меньшей мере, из WIM датчика, других внешних датчиков и внешнего элемента оценки. В дальнейшем под транспортным средством понимается транспортное средство или комбинация транспортных средств, состоящая из транспортного средства-тягача и одного или нескольких прицепов. На основе вычисленной общей нагрузки или осевой нагрузки транспортного средства предпринимаются меры, предназначенные, кроме прочего, для предотвращения повреждения дорожного полотна из-за перегрузки, для определения зависящих от эксплуатации интервалов технического обслуживания дорожного полотна, для определения платежей, зависящих от общей нагрузки или осевой нагрузки, или от числа осей транспортного средства и для повышения безопасности движения.
Нагрузка - это сила веса, кратко сила, с которой объект воздействует на грунт. В соответствии с этим, колесная нагрузка - это сила, с которой колесо транспортного средства воздействует на дорожное полотно; осевая нагрузка - это сила, с которой все колеса одной оси транспортного средства воздействуют на дорожное полотно; и общая нагрузка - это сила, с которой все колеса транспортного средства воздействуют на дорожное полотно.
В дальнейшем колесо, сдвоенное колесо и единое широкопрофильное колесо объединяются под общим понятием колесо. Ось - это ось с колесами или сдвоенными колесами, или с широкопрофильными колесами.
WIM датчики WIM систем вводятся в покрытие дорожного полотна, при этом полоса движения транспортного средства пересечена в продольном направлении к направлению движения несколькими WIM датчиками, установленными в покрытие дорожного полотна вдоль направления движения рядом друг с другом, при этом один колесный след транспортного средства пересекает один WIM датчик. В общем, WIM датчик выполнен как профиль, сформированный удлиненным вдоль продольной оси. Под колесным следом понимается траектория колеса транспортного средства на покрытии дорожного полотна при проезде транспортного средства. Под полосой движения понимается совокупность всех колесных следов транспортного средства. Также одним удлиненным WIM датчиком может пересекаться целиком полоса движения, или только один колесный след транспортного средства регистрироваться одним WIM датчиком. Часто WIM датчики устанавливаются в дорожное полотно в двух положениях, находящихся на расстоянии друг от друга по направлению движения, при этом с помощью известного расстояния WIM датчиков друг от друга вычисляется скорость, которую имеет колесо между находящимися на расстоянии друг от друга WIM датчиками. WIM датчики передают сигналы на внешний элемент оценки.
При этом для вычисления колесной нагрузки, числа проезжающих осей транспортных средств и скорости проезжающего транспортного средства достаточна WIM система, состоящая из нескольких, находящихся на расстоянии друг от друга WIM датчиков и одного внешнего элемента оценки. При этом для вычисления колесной нагрузки или осевой нагрузки WIM датчики обычно имеют один или несколько пьезоэлектрических силовых датчиков.
Вычисление нагрузки одного колеса происходит посредством измерения динамических сил реакции грунта, по меньшей мере, силовым датчиком при проезде одного колеса и скорости одного колеса. При этом под силой реакции грунта понимают силу, противодействующую силе, с которой колесо воздействовало на грунт. Скорость рассчитывается обычно во внешнем элементе оценки.
Чтобы проезжающие колеса или оси соотнести с транспортным средством, обычно дополнительно к WIM датчику для распознавания наличия транспортного средства на участке дорожного полотна необходимы другие внешние датчики, такие как, например, установленные в покрытие дорожного полотна индукционные петли в каждой полосе движения. Также могут применяться оптические методы, такие как камеры, световые барьеры, световые завесы или также радарные измерения или подобные, для распознавания наличия транспортного средства над WIM датчиком. Данные этих других внешних датчиков учитываются вместе с данными одного или нескольких WIM датчиков во внешнем элементе оценки. Другие внешние датчики повышают затраты на установку, затраты на техническое обслуживание и, наконец, финансовые и временные издержки на установку WIM системы.
Однозначное соотнесение проезжающих колес или осей с транспортным средством является непременным для будущих применений WIM систем. Эти применения включают в себя, не являясь исчерпывающими:
- непосредственное штрафование перегруженных транспортных средств на основании WIM измерения на полной рейсовой скорости,
- непосредственное штрафование транспортных средств с превышенной скоростью на основании WIM измерения на полной рейсовой скорости,
- зависящая от веса оплата дорожного сбора на основании WIM измерения на полной рейсовой скорости,
- зависящая от веса оплата на основании WIM измерения при промышленном использовании (порты, рудники и проч.).
Для названных пунктов предъявляются высокие требования к WIM системам. Так, в рекомендации Международной организации по законной метрологии (OIML) в нормативе OIML R-134 для измерения скорости транспортного средства без вмешательства оператора с помощью WIM системы рекомендовано определение наличия транспортного средства, а также проверка состояния того, были ли учтены все колеса транспортного средства. Это служит улучшению точности вычисленных данных, которая является чрезвычайно важной для эксплуатации WIM систем в вышеназванных применениях.
Далее, все большую роль играет также стоимость WIM системы. Ожидают насколько возможно простую установку с малым количеством компонентов и, подгоняемую тенденцией объединения в сеть нескольких WIM систем, насколько возможно автономную работу WIM датчиков.
Из публикации US2014309966A известна WIM система; со способом вычисления общей нагрузки транспортного средства WIM системой во время движения на участке дорожного полотна; при этом во время проезда транспортного средства на этом участке дорожного полотна учитываются как колесные нагрузки всех колес, так и скорость транспортного средства во время всего проезда; при этом колесные нагрузки учитываются одним или несколькими WIM датчиками; при этом скорость транспортного средства регистрируется с помощью дополнительных датчиков, таких как радар, размещенный в направлении движения массив лучей, или способом лазерной допплеровской велосиметрии; при этом соотнесение учтенных колесных нагрузок с транспортным средством происходит с помощью устройства для определения конца транспортного средства, проезжающего участок дорожного полотна, при этом названным устройством может быть, например, лучевая решетка, устанавливаемая перпендикулярно дорожному полотну, или могут быть индукционные петли, которые встроены в покрытие дорожного полотна; при этом из суммы всех относящихся к транспортному средству колесных нагрузок может быть определена общая нагрузка транспортного средства. При этом недостатком является то, что необходимое для вычисления общей нагрузки транспортного средства определение конца транспортного средства, то есть конца наличия транспортного средства над WIM датчиком требует дополнительных отдельных датчиков в, рядом или над дорожным полотном, установка которых вызывает более длительное закрытие участка дорожного полотна и более высокие издержки в отношении установки и технического обслуживания WIM системы.
Первая задача данного изобретения заключается в вычислении общей нагрузки транспортного средства на основе сигналов WIM датчика без дополнительных внешних датчиков и в вытекающем из этого сокращении издержек и затрат на установку для WIM систем. Следующая задача - это повышение точности WIM системы.
Изложение изобретения
По меньшей мере, одна из этих задач решается с помощью признаков независимого пункта формулы изобретения.
Изобретение касается WIM датчика для вычисления нагрузок от транспортных средств на участке дорожного полотна при проезде колеса транспортного средства через WIM датчик; этот WIM датчик расположен на участке дорожного полотна в поверхности дорожного полотна и образует с поверхностью дорожного полотна плоскость; WIM датчик выполнен как профиль, сформированный удлиненным вдоль продольной оси, по меньшей мере, с одним объемом; в объеме расположен, по меньше мере, силовой датчик; этот силовой датчик генерирует сигнал силового датчика; сигнал силового датчика соответствует динамической силе реакции грунта при проезде колеса, колесо воздействует силой на участок дорожного полотна; при этом в объеме расположен, по меньшей мере, электроакустический преобразователь; и при этом электроакустический преобразователь измеряет звуковые волны и предоставляет как сигнал преобразователя.
Под электроакустическим преобразователем понимается датчик, регистрирующий звуковые волны.
Едущее по участку дорожного полотна транспортное средство производит шумы. Эти шумы, или, соответственно, исходящие звуковые волны имеют место, кроме прочего, из-за качения колес транспортного средства по покрытию дорожного полотна или из-за мотора транспортного средства, при этом звуковые волны распространяются не только в окружающем воздухе, но также и в покрытии дорожного полотна. При этом характерные, определенные в одном положении в пространстве свойства этих звуковых волн зависят, кроме прочего, от удаления от источника звуковых волн и от среды распространения.
Поскольку звуковые волны отражаются от элементов в объеме, то присутствием элементов характерно влияют на распространение звуковых волн. Так, например, известно отражение звуковых волн от горных массивов, при котором на распространение исходящих звуковых волн оказывается характерное влияние. В данном случае имеет место отражение звуковых волн от элементов транспортного средства, и поэтому также от днища транспортного средства. Таким образом, эти элементы одного транспортного средства могут быть поняты как другие источники звуковых волн, при этом эти звуковые волны накладываются на первоначально имеющиеся звуковые волны. Отраженные звуковые волны, в свою очередь, попадают на покрытие дорожного полотна.
Поэтому произведенные транспортным средством звуковые волны и отраженные от элементов транспортного средства звуковые волны распространяются соответственно в покрытии дорожного полотна и, разумеется, проникают также сквозь WIM датчик, установленный в покрытии дорожного полотна. Звуковые волны распространяются, соответственно, также в объеме профиля WIM датчика.
Из наложения указанных звуковых волн определяется наличие элемента транспортного средства в окружающем пространстве электроакустического преобразователя, установленного в покрытии дорожного полотна, с помощью оценки измеренных сигналов электроакустического преобразователя.
С помощью известных законов распространения звуковых волн компоновкой с тремя или более электроакустическими преобразователями и оценки измеренных сигналов электроакустических преобразователей может быть определено положение источника звуковых волн в определенный момент времени.
Зная положение источника звуковых волн в определенный момент времени, можно с помощью оценки временного изменения положения определить траекторию источника звуковых волн, и эта траектория описывает динамическое изменение положения источника звуковых волн.
Электроакустические преобразователи расположены в объеме в покрытии дорожного полотна, в частности, в объеме WIM датчика, установленного в покрытии дорожного полотна.
WIM датчик, по меньшей мере, с электроакустическим преобразователем для определения наличия транспортного средства в окружающем пространстве WIM датчика предпочтителен по сравнению с WIM системой для измерения общей нагрузки транспортного средства, известной из публикации US2014309966A, поскольку отпадают другие отдельные внешние датчики, наряду с WIM датчиком для необходимого определения наличия транспортного средства в зоне датчика для соотнесения отдельных вычисленных колесных нагрузок с транспортным средством; при этом благодаря ненужности других отдельных внешних датчиков сокращаются стоимость установки, стоимость технического обслуживания и затраты на установку. Далее, длительность закрытия дорожного полотна для установки WIM системы может быть сокращена до менее восьми часов. Далее, установленный в WIM датчик микропроцессор для обработки сигнала делает возможным автономное применение датчика и сокращает требования к внешнему элементу оценки.
Краткое описание чертежей
Далее изобретение поясняется в качестве примера подробнее с привлечением фигур, которые показывают
Фиг.1 схематичный частичный вид участка дорожного полотна с частью WIM системы с WIM датчиками и другими внешними датчиками для определения наличия транспортного средства над WIM датчиком,
Фиг.2 схематичный частичный вид участка дорожного полотна с первой формой исполнения части WIM системы с WIM датчиками с интегрированными датчиками для определения наличия транспортного средства над WIM датчиком,
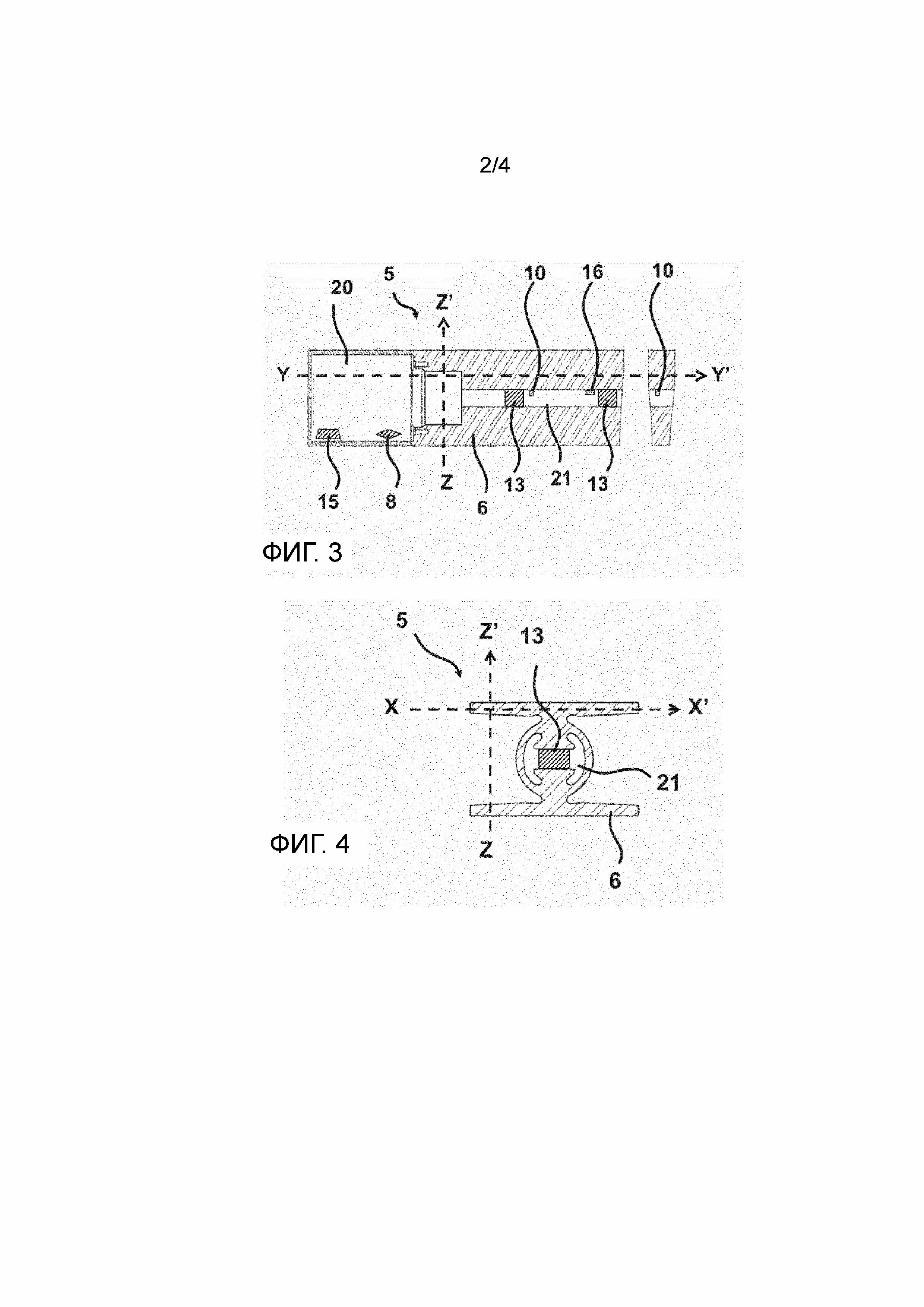
Фиг.3 схематичный частичный вид предпочтительной формы исполнения WIM датчика с интегрированными датчиками для определения наличия транспортного средства над WIM датчиком,
Фиг.4 следующий схематичный частичный вид предпочтительной формы исполнения WIM датчика с интегрированными датчиками для определения наличия транспортного средства над WIM датчиком,
Фиг.5 схематичный частичный вид участка дорожного полотна с первой формой исполнения части WIM системы с WIM датчиком с интегрированными датчиками для определения наличия транспортного средства над WIM датчиком, а также изображение вычисленной траектории транспортного средства, а также скоростей в различных местах траектории транспортного средства,
Фиг.6 диаграмму для наглядного изображения сигналов WIM датчика в предпочтительной форме исполнения, при этом отдельные компоненты WIM датчика по причине ясности восприятия схематично изображены на диаграмме,
Фиг.7 схематичный частичный вид следующей формы исполнения WIM датчика с энергоснабжением и интегрированными датчиками для определения наличия транспортного средства над WIM датчиком,
Фиг. 8 схематичный частичный вид следующей формы исполнения WIM датчика с генератором сигнала и интегрированными датчиками для определения наличия транспортного средства над WIM датчиком.
Пути исполнения изобретения
Фиг.1 показывает участок 1 дорожного полотна с частями WIM системы для вычисления общей нагрузки транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ с помощью одного или нескольких WIM датчиков 3 и нескольких внешних датчиков 4, 4‘, 4‘‘, 4‘‘‘ для измерения наличия транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ над WIM датчиком согласно уровню техники.
Фиг.2 показывает участок 1 дорожного полотна с частями WIM системы в первой форме исполнения для вычисления общей нагрузки транспортного средства 2, 2‘, 2‘‘, 2‘‘‘, по меньшей мере, двумя предпочтительными WIM датчиками 5, которые расположены в направлении XX‘ движения колеса на расстоянии друг от друга на участке дорожного полотна; при этом, как показано на Фиг.3 и Фиг.4, WIM датчик 5 - это сформированный удлиненным профиль; в этом профиле расположены один или несколько объемов 20, 21; при этом в объеме 20, 21 расположен, по меньшей мере, силовой датчик 13 для определения колесной или осевой нагрузки.
Под объемом 20, 21 понимается в предпочтительной форме исполнения область, частично или полностью охватываемая профилем, которая полностью или частично расположена по продольной оси YY‘ профиля 6. Объем 20 расположен рядом или под показанным на Фиг.4 профилем 6. Далее, объем 21 может также примыкать к концу относительно продольной оси YY‘ профиля 6. Таким образом, объем 21 может быть расположен, относительно направления движения XX‘, - рядом или относительно направления ZZ‘ вверх, - под показанным на Фиг.4 профилем 6. При этом под направлением ZZ‘ вверх понимается направление вертикально к поверхности дорожного полотна. Объем 21 может также примыкать, как показано на Фиг.3, к концу профиля 6.
В объеме 20, 21 расположены в предпочтительной форме исполнения, по меньшей мере, электроакустический преобразователь 10, который генерирует сигнал 110 преобразователя, и, по меньшей мере, два A/D преобразователя 11.
Далее, в объеме 20, 21 расположен, по меньшей мере, один силовой датчик 13; при этом силовой датчик при действии силы на профиль генерирует сигнал 100 силового датчика; при этом сигнал 100 силового датчика преобразуется в цифровой сигнал 101 силового датчика и предоставляется первым A/D-преобразователем 11; при этом, по меньшей мере, сигнал 110 преобразователя, по меньшей мере, электроакустического преобразователя 10 преобразуется и предоставляется A/D-преобразователем 11 и, в дальнейшем, обозначается как цифровой сигнал 111 преобразователя.
В дальнейшем, предоставление сигнала следует понимать так, что предоставленный сигнал доступен для дальнейшего использования. Также предоставление содержит в себе запоминание сигнала на электронном накопителе и загрузку сигнала из этого накопителя. Предоставление также содержит в себе изображение сигнала на экране.
Фиг.6 дает схематичный обзор указанных далее сигналов; при этом часть компонентов WIM системы также показана для лучшего понимания.
В предпочтительной форме исполнения силовой датчик 13 состоит, по меньшей мере, из пьезоэлектрического измерительного элемента с электродами и, по меньшей мере, усилителя заряда; пьезоэлектрический измерительный элемент при воздействии силы генерирует заряд; этот заряд с помощью электродов доступен на усилителе заряда; усилитель заряда преобразует заряд в сигнал 100 силового датчика и предоставляет сигнал 100 силового датчика; сигнал 100 силового датчика является электрическим сигналом, предпочтительно электрическим напряжением.
Разумеется, специалист может выбрать и другую форму исполнения силового датчика 13, такую как тензодатчик или пьезорезистивный измерительный элемент или другой измерительный элемент с или без электрического усилителя или подобной электрической схемы, который генерирует под действием силы соответствующий сигнал и предоставляет как сигнал 100 силового датчика.
Электроакустический преобразователь 10 имеет чувствительность к звуковым волнам в слышимой области от 20 Гц включительно до 21 кГц или в ультразвуковой области от 21 кГц включительно до 1 ГГц, или в слышимой области и в ультразвуковой области.
Далее в объеме 20, 21 расположен, по меньшей мере, микропроцессор 8 и, по меньшей мере, энергонезависимый накопительный элемент 9.
В предпочтительной форме исполнения в микропроцессоре 8 доступен, по меньшей мере, цифровой сигнал 101 силового датчика и, по меньшей мере, цифровой сигнал 111 преобразователя.
В микропроцессоре 511 регистрируются синхронно по времени, по меньшей мере, цифровой сигнал 101 силового датчика и, по меньшей мере, цифровой сигнал 111 преобразователя. Под синхронной по времени регистрацией, по меньшей мере, цифрового сигнала 101 силового датчика и цифрового электроакустического сигнала 111 понимают однозначное соотнесение зарегистрированного цифрового сигнала 101 силового датчика с измеренным одновременно цифровым электроакустическим сигналом 111. Цифровой сигнал 101 силового датчика является одновременным с цифровым сигналом 111 преобразователя, если цифровой сигнал 101 силового датчика и цифровой сигнал 111 преобразователя регистрируются по известной цифровой технологии передачи сигнала при обычном применении к одинаковому значению внутреннего датчика времени микропроцессора 8.
Под синхронной по времени регистрацией, по меньшей мере, двух цифровых сигналов 101 силового датчика понимают однозначное соотнесение обоих измеренных одновременно цифровых сигналов 101 силового датчика. Одновременными являются два цифровых сигнала 101 силового датчика, если цифровые сигналы 101 силового датчика регистрируются по известной цифровой технологии передачи сигнала при обычном применении к одинаковому значению внутреннего таймера микропроцессора 8. Понимается, что два синхронно зарегистрированных цифровых сигнала 101 силового датчика происходят, по меньшей мере, из двух силовых датчиков 13.
По меньшей мере, один цифровой сигнал 111 преобразователя анализируется алгоритмом в микропроцессоре 8 и предоставляется как информация 121 о наличии. При этом на энергонезависимом накопительном элементе 9 занесен в память, по меньшей мере, алгоритм, который загружается в микропроцессор 8. Алгоритм сравнивает цифровой сигнал 111 преобразователя, по меньшей мере, с характерной сигнатурой для наличия транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ над WIM датчиком 5 и отсюда составляет информацию 121 о наличии. Характерная сигнатура - это, по меньшей мере, известная и занесенная в память энергонезависимого накопительного элемента 9 заранее определенная величина сигнала, по меньшей мере, в заранее определенной области частот цифрового сигнала 111 преобразователя. Величина сигнала - это определенная интенсивность измеренного сигнала. Характерная сигнатура загружается в микропроцессор 8.
Если алгоритм находит соответствие в сравнении между загруженной характерной сигнатурой и цифровым сигналом 111 преобразователя, то определено наличие транспортного средства 2, 2‘ 2‘‘ 2‘‘‘ над WIM датчиком 5, и алгоритм формирует положительную информацию 121 о наличии. В противном случае алгоритм формирует отрицательную информацию 121 о наличии.
Как изображено на Фиг.5, алгоритм анализирует в микропроцессоре 8 сигналы 111 преобразователя, по меньшей мере, трех расположенных на расстоянии друг от друга электроакустических преобразователей 10. При этом алгоритм сравнивает цифровые сигналы 111 преобразователя, руководствуясь их формой, и формирует из временного смещения двух известных форм двух цифровых сигналов 111 преобразователя временную разницу времени поступления обоих зарегистрированных цифровых сигналов (111) преобразователя. На следующем этапе алгоритм попарно формирует временную разницу во времени поступления трех сигналов 111 преобразователя различных электроакустических преобразователей 10. Отсюда алгоритм формирует информацию 125 о фазах и предоставляет ее. Точное положение P1, P2 проходящего транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ в окружающем пространстве WIM датчика 5 алгоритм рассчитывает из информации 125 о фазах. Из положения транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ алгоритм формирует информацию 122 о положении транспортного средства и предоставляет ее.
Из информации 122 о положении транспортного средства и временного изменения информации 122 о положении транспортного средства алгоритм создает траекторию T транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ в окружающем пространстве WIM датчика 5. Траектория T предоставляется алгоритмом как информация 123 о траектории транспортного средства. Траектория T - это зависящая от времени математическая кривая пути в трехмерной системе координат. Таким образом, первая производная траектории по времени - это скорость, представленная на Фиг.5 как v1, v2, v3, транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ в окружающем пространстве WIM датчика 5. Вторая производная траектории по времени - это ускорение транспортного средства 2, 2‘ 2‘‘ 2‘‘‘ в окружающем пространстве WIM датчика 5.
Ускорение транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ действует как дополнительная силовая компонента на силовой датчик 13 и, тем самым, влияет на измеренный цифровой сигнал 101 силового датчика. Так, при торможении (отрицательном ускорении) транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ сила, с которой передние колеса транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ воздействовали на покрытие дорожного полотна, повышается на силовую компоненту, которая пропорциональна отрицательному ускорению транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ и весу транспортного средства 2, 2‘, 2‘‘, 2‘‘‘, в то время как сила, с которой задние колеса транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ воздействовали на покрытие дорожного полотна, уменьшена на силовую компоненту пропорционально ускорению и весу транспортного средства 2, 2‘, 2‘‘, 2‘‘‘.
Точно также при радиальном ускорении транспортного средства 2, 2‘, 2‘‘, 2‘‘‘, которое движется по искривленной кривой пути в трехмерной системе координат, дополнительная силовая компонента действует на силовой датчик 13 и, таким образом, влияет на измеренный цифровой сигнал 102 силового датчика. Так, при левом повороте, который проходит транспортное средство 2, 2‘, 2‘‘, 2‘‘‘, сила, с которой правые колеса транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ действовали на покрытие дорожного полотна, повышается, сила, с которой левые колеса транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ воздействовали на покрытие дорожного полотна, уменьшается, соответственно на силовую компоненту пропорционально радиальному ускорению транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ и весу транспортного средства 2, 2‘, 2‘‘, 2‘‘‘.
Из информации 123 о траектории транспортного средства и цифровых сигналов 101 силового датчика алгоритм формирует скорректированные цифровые сигналы 102 силового датчика проехавших над WIM датчиком 5 колес транспортного средства 2, 2‘, 2‘‘, 2‘‘‘. Из информации 123 о траектории транспортного средства алгоритм рассчитывает ускорение или радиальное ускорение транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ на позиции силового датчика 13 и рассчитывает из измеренной силы, с которой колесо действует на силовой датчик 13, долю силы (силовую компоненту), которая имеет место из-за ускорения транспортного средства 2, 2‘, 2‘‘, 2‘‘‘, формирует разницу этой силовой компоненты и измеренного цифрового сигнала 101 силового датчика и отсюда генерирует скорректированный цифрой сигнал 102 силового датчика Тем самым, скорректированный цифровой сигнал 102 силового датчика является независимым от силы, действовавшей от ускорения или радиального ускорения транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ на участок дорожного полотна.
В предпочтительной форме исполнения алгоритм формирует скорректированный цифровой сигнал 102 силового датчика из информации 123 о траектории транспортного средства и, по меньшей мере, из цифрового сигнала 101 силового датчика проехавших над WIM датчиком 5 колес транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ и, по меньшей мере, из следующей величины измерения; при этом другая величина измерения также, но не исключительно, может быть температурой, при этом температура измеряется температурным зондом 16 как сигнал 130 температурного зонда, преобразуется A/D преобразователем 11 и предоставляется в цифровой форме как цифровой сигнал 131 температурного зонда. Алгоритм корректирует цифровой сигнал 101 силового датчика на основании заранее известной температурной зависимости силового датчика 13, до того, как алгоритм вычтет выше описанную силовую компоненту, которая пропорциональна радиальному ускорению или ускорению транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ и весу транспортного средства 2, 2‘, 2‘‘, 2‘‘‘, из цифрового сигнала 101 силового датчика, и сформирует результат как скорректированный цифровой сигнал силового датчика.
В предпочтительной форме исполнения, в случае положительной информации 121 о наличии, алгоритмом в микропроцессоре 8 или во внешнем элементе 7 оценки все доступные скорректированные цифровые сигналы 102 силового датчика соотносятся с транспортным средством 2, 2‘ 2‘‘ 2‘‘‘.
Алгоритм во внешнем элементе 7 оценки определяет скорректированную осевую нагрузку всех осей и скорректированную общую нагрузку транспортного средства 2, 2‘, 2‘‘, 2‘‘‘ и предоставляет ее в цифровом виде. Благодаря использованию скорректированных цифровых сигналов 102 силового датчика для этого определения повышается точность измерения проехавших колесных нагрузок, осевых нагрузок и общей нагрузки транспортного средства 2, 2‘, 2‘‘, 2‘‘‘.
WIM датчик 5 имеет в одной форме исполнения электронный элемент 15 передачи сигнала; при этом в предпочтительной форме исполнения на электронном элементе 15 передачи сигнала расположен элемент подключения для провода, при этом провод используется для передачи предоставленных в WIM датчике сигналов на внешнее устройство оценки; при этом предпочтительной форме исполнения на элементе передачи сигнала расположен передатчик и приемник электромагнитных волн; при этом элемент 15 передачи сигнала передает предоставленные в WIM датчике 5 сигналы с помощью электромагнитных волн на внешний элемент 7 оценки. Внешний элемент 7 оценки - это, например, ноутбук или персональный компьютер или децентрализованная IT-инфраструктура.
В следующей форме исполнения, по меньшей мере, в объеме 20, 21 расположен источник энергоснабжения 14, как изображено на Фиг.7 в предпочтительной форме исполнения; при этом источник энергоснабжения 14 снабжает, по меньшей мере, один электронный элемент WIM датчика 5 электрической энергией.
В предпочтительной форме исполнения не окончательный список электронных элементов включает в себя, по меньшей мере, один из следующих элементов: силовой датчик 13, электроакустический преобразователь 10, A/D преобразователь 11, элемент 15 передачи сигнала, температурный зонд 16.
Разумеется, могут иметься также электронные элементы с различными задачами в форме одиночного электронного компонента, как например, специализированного встроенного коммутатора, сокращенно ASIC. Также может иметься несколько электронных элементов со схожими задачами в форме единичного электронного компонента.
В форме исполнения WIM датчика 5 источник энергоснабжения 14 - это единственный источник электрической энергии WIM датчика 5. В следующей форме исполнения источник энергоснабжения 14 - дополнительный источник электрической энергии WIM датчика 5, например, бесперебойное снабжение током или общее запасное снабжение током; при этом последнее в случае исчезновения напряжения сети означает короткое прерывание снабжения током до того, как ток автоматически возобновиться с помощью источника энергоснабжения 14.
В предпочтительной форме исполнения источник энергоснабжения 14 снабжает электрической энергией, по меньшей мере, один расположенный на участке 1 дорожного полотна электронный элемент.
Если снабжение электронного элемента электрической энергией заканчивается, то это в дальнейшем обозначается как выключение источника энергоснабжения 14 для электронного элемента, даже если источник энергоснабжения 14 неизменно снабжает электрической энергией другие электронные элементы. Аналогично в дальнейшем возобновление снабжения электронного элемента электрической энергией обозначается как включение источника энергоснабжения 14 для электронного элемента. Также в дальнейшем сокращение источником энергоснабжения 14 питания электрической энергией электронного элемента обозначается как сокращение энергоснабжения 14 для электронного элемента.
Алгоритм в микропроцессоре 8 включает или выключает источник энергоснабжения 14, по меньшей мере, одного расположенного на участке 1 дорожного полотна электронного элемента или переводит, по меньшей мере, один расположенный на участке 1 дорожного полотна электронный элемент из режима работы в режим низкой энергии, в режиме низкой энергии электронные компоненты имеют уменьшенное энергопотребление, чем в режиме работы.
Источник энергоснабжения 14 предоставляет электрическую энергию в течение продолжительности энергоснабжения, продолжительность энергоснабжения завершается, если источник энергоснабжения 14 значительно разряжен.
В предпочтительной форме исполнения с помощью информации 121 о наличии происходит приведение в соответствие источника энергоснабжения 14 отдельных электронных элементов или групп электронных элементов WIM датчика 5; при этом приведение в соответствие - это, в частности, сокращение или отключение источника энергоснабжения 14, благодаря чему продолжительность энергоснабжения значительно повышается. С помощью алгоритма в микропроцессоре 8 при отсутствии распознавания наличия колеса 11 на участке 1 дорожного полотна отключается или сокращается энергоснабжение 14, по меньшей мере, одного расположенного на участке 1 дорожного полотна электронного элемента, электронный элемент не является необходимым для регистрации наличия колеса 11 на участке 1 дорожного полотна. При распознанном наличии колеса 11 на участке 1 дорожного полотна отключенный или сокращенный источник энергоснабжения 14 снова включается. Благодаря отключению или сокращению источника энергоснабжения 14 удлиняется продолжительность энергоснабжения источником электроснабжения 14. В предпочтительной форме исполнения коммутационная операция или сокращение источника энергоснабжения 14, по меньшей мере, для одного расположенного на участке 1 дорожного полотна электронного элемента происходит с помощью алгоритма на основе информации 121 о наличии.
В предпочтительной форме исполнения оценка, по меньшей мере, цифрового сигнала 111 преобразователя делает возможным вычисление актуальной шумовой нагрузки. Вычисление актуальной шумовой нагрузки происходит с помощью алгоритма в микропроцессоре 8 или во внешнем элементе 7 оценки, алгоритм определяет уровень звукового давления цифрового сигнала 11 преобразователя. Из уровня звукового давления вычисляется звуковая эмиссия проезжающего транспортного средства 2, 2‘, 2‘‘, 2‘‘‘. Звуковая эмиссия сравнивается с предварительно заданным граничным значением для звуковой эмиссии. Результат этого сравнения предоставляется как звуковой сигнал и передается с помощью элемента передачи сигнала на внешний элемент оценки или на ноутбук, или на персональный компьютер, или на децентрализованную IT-инфраструктуру через Интернет.
В следующей форме исполнения в объеме 20, 21 профиля 6 расположен, по меньшей мере, акустический генератор 12 сигнала, как показано на Фиг.8; акустический генератор 12 сигнала генерирует акустические сигналы с частотами в ультразвуковой области между 21 кГц и 1 ГГц; акустический генератор 12 сигнала - это дополнительный источник звуковых волны, который существует дополнительно к вышеназванным, исходящим от транспортного средства 2, 2‘ 2‘‘ 2‘‘‘ источникам звуковых волн; звуковые волны распространяются известным образом и отражаются от элементов транспортного средства 2, 2‘ 2‘‘ 2‘‘‘. Поэтому, звуковые волны, исходя из акустического генератора 12 сигнала, дополнительно к созданным транспортным средством 2, 2‘ 2‘‘ 2‘‘‘ звуковым волнам регистрируются, по меньшей мере, электроакустическим преобразователем 10, при этом зарегистрированные звуковые волны акустического генератора 526 сигналов, одинаково с созданными транспортным средством 2, 2‘ 2‘‘ 2‘‘‘ звуковыми волнами, используются для определения наличия транспортного средства 2, 2‘ 2‘‘ 2‘‘‘. Акустический генератор 12 сигнала управляется алгоритмом в микропроцессоре 511, при этом алгоритм управляет частотой, длительностью и интенсивностью генерированных звуковых волн.
Зная данное изобретение, специалист может разместить несколько WIM датчиков 5 с электроакустическими преобразователями 10 на расстоянии друг от друга в дорожном полотне. Цифровые сигналы 111 преобразователя и цифровые сигналы 101 силового датчика регистрируются во внешнем элементе 7 оценки; при этом регистрация цифровых сигналов 111 преобразователя и цифровых сигналов 101 силового датчика нескольких WIM датчиков 5 позволяет повысить точность измерений; при этом регистрация цифровых сигналов 111 преобразователя и цифровых сигналов 101 силового датчика нескольких WIM датчиков 5 позволяет проверить измеренные сигналы на соответствие.
В следующей предпочтительной форме исполнения WIM датчика 5 за конфигурируемый интервал времени, по меньшей мере, один цифровой сигнал 111 преобразователя по времени синхронизируется, по меньшей мере, с цифровым сигналом 101 силового датчика и с временной меткой запоминается на энергонезависимом накопительном элементе 9 или на внешнем элементе 7 оценки, при этом временная метка 141 состоит из даты и времени суток и предоставляется алгоритмом в микропроцессоре 8.
Список ссылочных обозначений
1-Участок дорожного полотна
2, 2’, 2’’, 2’’’-Транспортное средство, транспортное средство с прицепом, комбинация транспортных средств
3-WIM датчик
4, 4’, 4’’, 4’’’-Другие внешние датчики для распознавания наличия
транспортного средства
5-WIM датчик в первой предпочтительной форме
исполнения
6-Профиль
7-Внешний элемент оценки
8-Микропроцессор
9-Энергонезависимый накопительный элемент
10-Электроакустический преобразователь
11-A/D-преобразователь
12-Генератор сигнала
13-Силовой датчик
14-Источник энергоснабжения
15-Элемент передачи сигнала
16-Температурный зонд
20-Объем
21-Объем
100-Сигнал силового датчика
101-Цифровой сигнал силового датчика
102-Скорректированный цифровой сигнал силового датчика
110-Сигнал преобразователя
111-Цифровой сигнал преобразователя
121-Информация о наличии
122-Информация о положении транспортного средства
123-Информация о траектории транспортного средства
125-Информация о фазах
126-Информация о нагрузке
130-Сигнал температурного зонда
131-Цифровой сигнал температурного зонда
P1-Первое положение
P2-Второе положение
v1-Первая скорость
v2-Вторая скорость
v3-Третья скорость
T-Траектория
XX‘-Направление движения
YY‘-Продольная ось
ZZ‘-Направление вверх.
Реферат
Изобретение относится к технике контроля движения транспортных средств. Оно касается WIM датчика для определения нагрузок транспортных средств на участке дорожного полотна при проезде колеса транспортного средства через WIM датчик. WIM датчик расположен на участке дорожного полотна в поверхности дорожного полотна и образует с поверхностью дорожного полотна плоскость. WIM датчик выполнен как сформированный удлиненным вдоль продольной оси профиль, по меньшей мере, с объемом, в котором расположен, по меньшей мере, силовой датчик. Силовой датчик генерирует сигнал силового датчика, сигнал силового датчика соответствует динамической силе реакции грунта при проезде колеса, колесо действует с силой на участок дорожного полотна. При этомв объеме расположен, по меньшей мере, электроакустический преобразователь, и при этом электроакустический преобразователь измеряет звуковые волны и предоставляет их как сигнал преобразователя. Технический результат заключается в упрощении конструкции и установки устройства в дорожное полотно за счет исключения внешних датчиков и повышение точности измерений. 2 н. и 13 з.п. ф-лы, 8 ил.
Комментарии