Устройство для измерения нагрузки транспортного средства - RU182550U1
Код документа: RU182550U1
Чертежи









Описание
Область техники, к которой относится предлагаемая полезная модель
Предлагаемая полезная модель относится к устройству для измерения нагрузки транспортного средства и, в частности, к устройству для измерения нагрузки транспортного средства, которое может быть установлено на гибком опорном приспособлении подвески транспортного средства для немедленного и автоматического измерения нагрузки транспортного средства без измерения вручную, и которое может регистрировать результаты измерения в регистраторе движения с помощью передачи сигнала, или может хранить данные измерения в центре обработки данных посредством сети передачи данных для осуществления управления логистикой.
Описание предшествующего уровня техники
Во избежание перегрузки тяжелыми грузами обычных транспортных средств, а также сомнений по поводу безопасности, на обычном транспортном средстве размещают переносные весы для контроля нагрузки обычного транспортного средства. Однако нагрузку обычного транспортного средства можно измерять только в состоянии покоя, и состояние нагрузки нельзя определить немедленно в процессе движения. Переносные весы также необходимо снимать с транспортного средства после измерения нагрузки транспортного средства, а это неудобно в использовании.
Известно устройство для измерения веса груза автомобиля, описанное в CN 202782852, которое содержит модуль для измерения угла и вычислительное устройство. Модуль для измерения угла устанавливается на рессоре автомобиля и определяет угол деформации рессоры. Таким образом, это устройство может по измеренному углу рассчитать вес. Однако, описанный процесс измерения угла деформации не обладает достаточной чувствительностью, так как для небольших грузов изменения угла деформации малы. Описанное устройство пригодно только для измерения тяжелых грузов.
Для устранения недостатков согласно предлагаемой полезной модели предложено устройство для измерения нагрузки транспортного средства с целью уменьшения или устранения вышеуказанных проблем.
Краткое описание полезной модели
Основной целью предлагаемой полезной модели является обеспечение устройства для измерения нагрузки транспортного средства, и в частности, устройства для измерения нагрузки транспортного средства, которое может быть установлено на гибком опорном приспособлении системы подвески транспортного средства для немедленного и автоматического измерения нагрузки транспортного средства без измерения вручную, и которое может регистрировать результаты измерения в регистраторе движения с помощью передачи сигнала, или может хранить данные измерения в центре обработки данных посредством сети передачи данных для осуществления управления логистикой.
Устройство для измерения нагрузки транспортного средства содержит модуль считывания перемещения, модуль обработки/передачи сигнала, а также модуль приема/обработки сигнала. Модуль считывания перемещения содержит несколько датчиков перемещения, соответственно установленных на гибких опорных приспособлениях системы подвески транспортного средства. Каждый датчик перемещения, подсоединен к двум опорным пластинам соответствующего гибкого опорного приспособления для измерения величины перемещения между двумя опорными пластинами. Модуль обработки/передачи сигнала осуществляет передачу сигналов, которые обнаружены датчиками перемещения, на модуль приема/обработки сигнала. Согласно предлагаемой полезной модели разработано устройство для измерения нагрузки транспортного средства, которое может быть удобно установлено на транспортном средстве и которое может точно определять нагрузку транспортного средства.
В предлагаемом устройстве, датчики перемещения установлены между двумя опорными пластинами транспортного средства, при этом величина перемещения между этими двумя опорными пластинами, измеренная датчиком перемещения, и используется для расчета нагрузки транспортного средства. Предлагаемое устройство измеряет перемещение нагрузки автомобиля непосредственно, поэтому обладает большей чувствительностью по сравнению с известными устройствами.
Другие цели, преимущества и элементы новизны полезной модели будут более понятны из нижеследующего описания и прилагаемых чертежей.
Краткое описание чертежей
На Фиг. 1 изображен вид сбоку в рабочем состоянии устройства для измерения нагрузки транспортного средства согласно предлагаемой полезной модели, установленного на гибком опорном приспособлении системы подвески транспортного средства;
на Фиг. 2 - вид сбоку в частичном разрезе устройства для измерения нагрузки транспортного средства в первом варианте осуществления согласно предлагаемой полезной модели;
на Фиг. 3 - вид сбоку в частичном разрезе устройства для измерения нагрузки транспортного средства во втором варианте осуществления согласно предлагаемой полезной модели;
на Фиг. 4 - вид сбоку в частичном разрезе устройства для измерения нагрузки транспортного средства в третьем варианте осуществления согласно предлагаемой полезной модели;
на Фиг. 5 - вид сбоку в частичном разрезе устройства для измерения нагрузки транспортного средства в четвертом варианте осуществления согласно предлагаемой полезной модели;
на Фиг. 6 - вид сбоку в частичном разрезе устройства для измерения нагрузки транспортного средства в пятом варианте осуществления согласно предлагаемой полезной модели;
на Фиг. 7 - вид сбоку в частичном разрезе устройства для измерения нагрузки транспортного средства в шестом варианте осуществления согласно предлагаемой полезной модели;
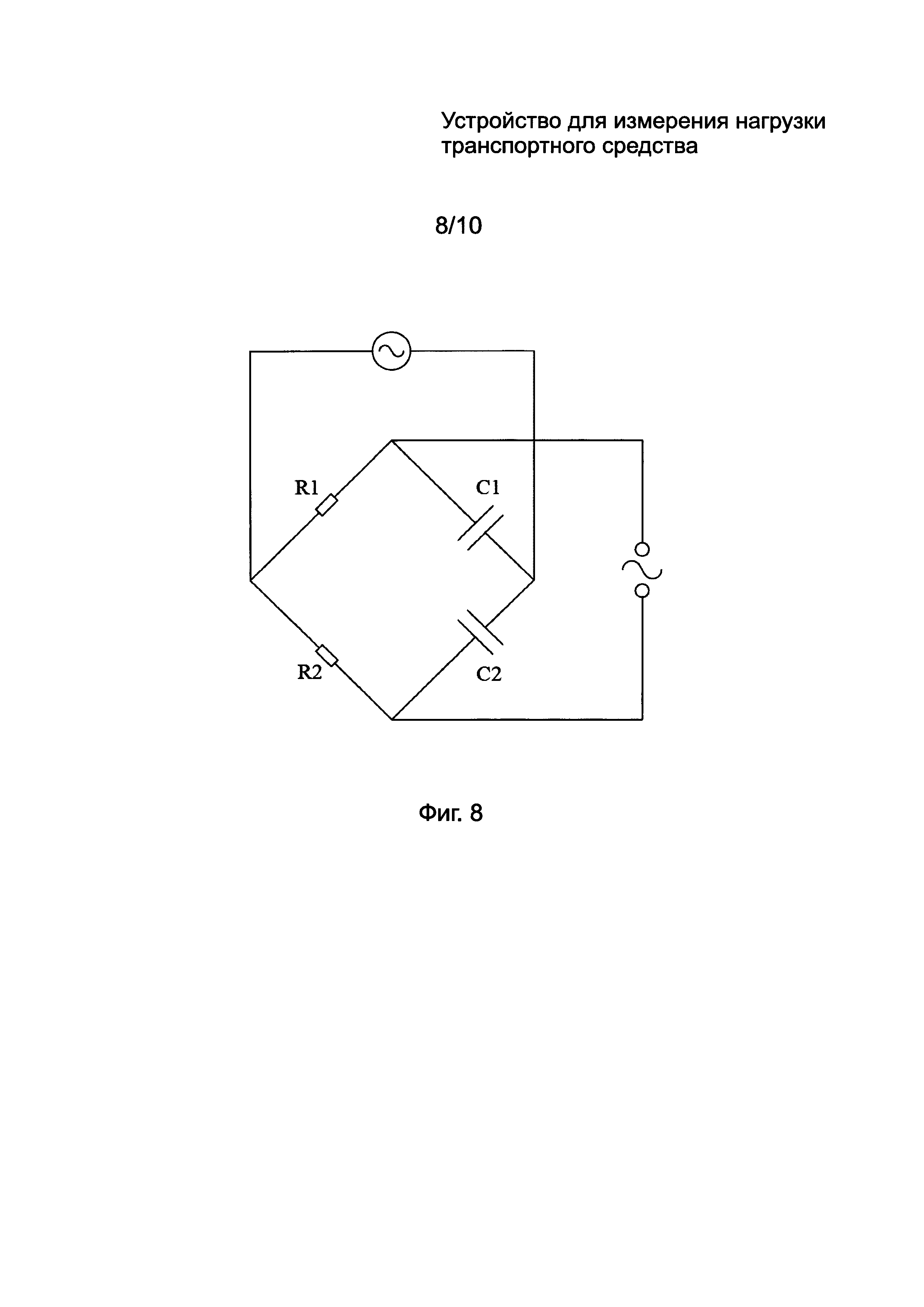
Фиг. 8 представляет собой принципиальную схему устройства для измерения нагрузки транспортного средства, изображенного на Фиг. 7;
на Фиг. 9 - вид сбоку первого варианта модификации устройства для измерения нагрузки транспортного средства, изображенного на Фиг. 2;
на Фиг. 10 - вид сбоку в частичном разрезе второго варианта модификации устройства для измерения нагрузки транспортного средства, изображенного на Фиг. 2.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ ПОЛЕЗНОЙ МОДЕЛИ
Как изображено на Фиг. 1, устройство для измерения нагрузки транспортного средства согласно настоящей полезной модели устанавливают на гибких опорных приспособлениях 40 системы подвески транспортного средства между двумя опорными пластинами 41, 42, которое содержит модуль считывания перемещения 10, модуль обработки/передачи сигнала 20 и модуль приема/обработки сигнала 30.
Модуль считывания перемещения 10 содержит несколько датчиков перемещения 11, соответственно установленных на гибких опорных приспособлениях 40 подвески транспортного средства. Таким образом, количество датчиков перемещения 11 модуля считывания перемещения 10 равно количеству гибких опорных приспособлений 40 системы подвески транспортного средства. Каждый из датчиков перемещения 11 подсоединен к двум опорным пластинам 41, 42 соответствующего гибкого опорного приспособления 40 для определения величины перемещения верхних и нижних концов двух опорных пластин 41, 42. Например, расстояние между двумя опорными пластинами 41, 42 может быть от 200 до 350 миллиметров. Каждый из датчиков перемещения 11 содержит фиксирующий элемент 12, подвижный элемент 13, и модуль обнаружения 14. Фиксирующий элемент 12 подсоединен к нижней пластине из двух опорных пластин 41, 42 (именуемой в дальнейшем - нижняя опорная пластина 41) соответствующего гибкого опорного приспособления 40. Подвижный элемент 13 подсоединен к верхней пластине из двух опорных пластин 41, 42 (именуемой в дальнейшем -верхняя опорная пластина 42) соответствующего гибкого опорного приспособления 40, и подвижно соединен с фиксирующим элементом 12. Модуль обнаружения 14 установлен между фиксирующим элементом 12 и подвижным элементом 13 для обнаружения величины перемещения подвижного элемента 13 относительно фиксирующего элемента 12. Ниже приводятся предпочтительные варианты осуществления датчиков перемещения 11 согласно предлагаемой полезной модели.
Как изображено на Фиг. 2, согласно первому варианту осуществления предлагаемой полезной модели датчик перемещения 11 представляет собой датчик перемещения под давлением, фиксирующий элемент 12А представляет собой полую трубку с верхним отверстием, и подвижный элемент 13А представляет собой полую трубку с нижним отверстием, и которая установлена вокруг фиксирующего элемента 12А. Модуль обнаружения 14А содержит датчик давления 141А, резервуар 142А для хранения масла и соединительный шланг 143А. Датчик давления 141А надежно установлен в фиксирующем элементе 12А. Резервуар 142А для хранения масла надежно установлен в подвижном элементе 13А и содержит масло. Соединительный шланг 143А соединен с датчиком давления 141А и резервуаром 142А для хранения масла.
При применении во время перемещения вниз верхней опорной пластины 42 гибкого опорного приспособления 40 относительно нижней опорной пластины 41 под действием нагрузки транспортного средства, подвижный элемент 13А осуществляет перемещение вместе с верхней опорной пластиной 42, и это позволяет резервуару 142А для хранения масла осуществлять перемещение внутрь вместе с подвижным элементом 13А относительно датчика давления 141А. Затем датчик давления 141А подает сигнал изменения давления потенциальной энергии согласно положению резервуара 142А для хранения масла, и величина перемещения подвижного элемента 13А относительно фиксирующего элемента 12А может быть преобразована с помощью сигнала об изменении давления потенциальной энергии. Величина перемещения представляет собой также величину перемещения верхней опорной пластины 42 относительно нижней опорной пластины 41, и нагрузка транспортного средства может быть рассчитана по величине перемещения. Например, когда нагрузка транспортного средства увеличивается для уменьшения высоты резервуара 142А для хранения масла, и сигнал изменения давления потенциальной энергии, который подается датчиком давления 141А, становится слабее. И наоборот, когда нагрузка транспортного средства уменьшается для увеличения-высоты резервуара 142А для хранения масла, и сигнал изменения давления потенциальной энергии, который подается датчиком давления 141А, становится сильнее.
Как изображено на Фиг. 9, в первой модификации датчика перемещения 11 согласно первому варианту осуществления предлагаемой полезной модели, датчик перемещения 11 не содержит фиксирующий элемент 12А и подвижный элемент 13А, резервуар 142А для хранения масла непосредственно и надежно установлен на нижней опорной пластине 41, а соединительный шланг 143А подсоединен к резервуару 142А для хранения масла и датчику давления 141А, и это также позволяет обеспечивать обнаруживающее действие, как и вышеупомянутое действие в первом варианте осуществления датчика перемещения 11, изображенного на Фиг. 2.
Как изображено на Фиг. 10, во второй модификации датчика перемещения 11 согласно первому варианту осуществления предлагаемой полезной модели, датчик перемещения 11 содержит по меньшей мере один промежуточный корпус 121, а резервуар 142А для хранения масла и/или датчик давления 141А подсоединены к верхней опорной пластине 42 и/или нижней опорной пластине и 41 посредством по меньшей мере одного промежуточного корпуса 121, и это позволяет резервуару 142А для хранения масла и датчику давления 141А занимать различные положения при установке, независимо от положения верхней опорной пластины 42 и нижней опорной пластины 41. Таким образом, происходит перемещение резервуара 142А для хранения масла вместе с верхней опорной пластиной 42 посредством промежуточного корпуса 121, и перемещение вместе с подвижным элементом 13А относительно датчика давления 141А.
Как изображено на Фиг. 3, согласно второму варианту осуществления предлагаемой полезной модели в датчике перемещения 11 фиксирующий элемент 12В представляет собой полую трубку с верхним отверстием, подвижный элемент 13В представляет собой полую трубку с нижним отверстием, и модуль обнаружения 14В содержит датчик давления 141В, гофрированную трубку 142В, соединительный шланг 143В и нажимную головку 144В. Датчик давления 141В надежно установлен в фиксирующем элементе 12В. Гофрированная трубка 142 В установлена на датчике давления 141В и установлена в фиксирующем элементе 12В. Соединительный шланг 143В установлен в фиксирующем элементе 12В и подсоединен к датчику давления 141В. Модуль обнаружения 14В содержит масло, находящееся между гофрированной трубкой 142В и соединительным шлангом 143В. Соединительный шланг 143В имеет конец, противоположный датчику давления 141В, и клапан 145В, установленный на конце соединительного шланга 143В. Нажимная головка 144В надежно установлена в подвижном элементе 13В по направлению к подвижному элементу 12В и упирается в гофрированную трубку 142В.
При перемещении верхней опорной пластины 42 гибкого опорного приспособления 40 вниз по направлению к нижней опорной пластине 41 под действием нагрузки транспортного средства, происходит перемещение подвижного элемента 13В вместе с верхней опорной пластиной 42. Таким образом, нажимная головка 144В осуществляет давление на гофрированную трубку 142В для деформирования гофрированной трубки 142В. После деформирования гофрированной трубки 142В посредством нажимной головки 144В происходит перемещение масла, которое расположено между гофрированной трубкой 142В и соединительным шлангом 143В, для изменения уровня масла в соединительном шланге 143В, и датчик давления 141В может осуществлять преобразование величины перемещения подвижного элемента 13В относительно фиксирующего элемента 12В для расчета величины перемещения верхней опорной пластины 42 относительно нижней опорной пластины 41. Таким образом, нагрузка транспортного средства может быть рассчитана согласно величине перемещения. При этом, когда непосредственно происходит упирание подвижного элемента 13В в гофрированную трубку 142В, нажимная головка 144В может не быть использована.
Как изображено на Фиг. 4, согласно третьему варианту осуществления предлагаемой полезной модели датчик перемещения 11 представляет собой ультразвуковой датчик перемещения, фиксирующий элемент 12С представляет собой полую трубку с верхним отверстием, подвижный элемент 13С представляет собой полую трубку с нижним отверстием, и модуль обнаружения 14С содержит ультразвуковой преобразователь 141С и отражающее зеркало 142С. Ультразвуковой преобразователь 141С надежно установлен в фиксирующем элементе 12С, и отражающее зеркало 142С надежно установлено в подвижном элементе 13С и обращено к ультразвуковому преобразователю 141С. Когда происходит перемещение верхней опорной пластины 42 гибкого опорного приспособления 40 вниз по направлению к нижней опорной пластине 41 под действием нагрузки транспортного средства, происходит перемещение подвижного элемента 13С вместе с верхней опорной пластиной 42, что позволяет отражающему зеркалу 142 осуществлять перемещение вместе с подвижным элементом 13С относительно ультразвукового преобразователя 141С. Величина перемещения подвижного элемента 13С относительно фиксирующего элемента 12С может быть преобразована с помощью ультразвукового преобразователя 141С, принимающим отраженный ультразвук от отражающего зеркала 142С. Таким образом, нагрузка транспортного средства может быть рассчитана на основании величины перемещения верхней опорной пластины 42 относительно нижней опорной пластины 41. В третьем варианте осуществления предлагаемого изобретения ультразвуковой преобразователь 141С может быть заменен светочувствительным датчиком перемещения для преобразования величины перемещения посредством определения изменения хода луча света.
Как изображено на Фиг. 5, согласно четвертому варианту осуществления предлагаемой полезной модели датчик перемещения 11 представляет собой магнитострикционный датчик перемещения, фиксирующий элемент 12D представляет собой удлиненную волноводную трубку и содержит чувствительный компонент, расположенный в волноводной трубке, а чувствительный компонент изготовлен из магнитострикционного материала. Подвижный элемент 13D представляет собой полое магнитное кольцо и установлен вокруг фиксирующего элемента 12D. Модуль обнаружения 14D содержит магнитострикционный датчик, надежно закрепленный на нижнем конце фиксирующего элемента 12D. В соответствии с магнитострикционным принципом происходит генерирование импульсного сигнала деформации при помощи двух различных магнитных полей для обеспечения обнаруживающего действия. Магнитострикционный датчик может генерировать импульс тока, и этот импульса тока может быть передан в волноводной трубке для генерирования периферийного магнитного поля вне волноводной трубки.
При перемещении верхней опорной пластины 42 гибкого опорного приспособления 40 в направлении нижней опорной пластины 41 под действием нагрузки транспортного средства, магнитное кольцо осуществляет перемещение вместе с верхней опорной пластиной 42, и происходит генерирование импульсного волнового сигнала механической деформации в волноводной трубке по магнитострикционному принципу. Происходит передача импульсного волнового сигнала механической деформации с фиксированной скоростью звука и его обнаружение при помощи магнитострикционного датчика. Так как время передачи импульсного волнового сигнала механической деформации в волноводной трубке является пропорциональным расстоянию между магнитным кольцом и магнитострикционным датчиком, величина перемещения подвижного элемента 13D относительно фиксирующего элемента 12D может быть точно рассчитана путем измерения времени передачи. Таким образом, нагрузка транспортного средства может быть рассчитана в соответствии с величиной перемещения верхней опорной пластины 42 относительно нижней опорной пластины 41.
Как изображено на Фиг. 6, согласно пятому варианту осуществления предлагаемого изобретения датчик перемещения 11 представляет собой датчик перемещения в виде дифференциальной индукционной катушки, фиксирующий элемент 12Е представляет собой полую трубку с верхним отверстием, предпочтительно, фиксирующий элемент 12Е содержит два элемента предупреждения столкновений 121Е, изготовленные из резинового материала и соответственно расположенные сверху и снизу фиксирующего элемента 12Е. Подвижный элемент 13Е представляет собой подвижный индукционный стержень и простирается в фиксирующем элементе 12Е. Подвижный индукционный стержень содержит верхний конец, подсоединенный к верхней опорной пластине 42. Модуль обнаружения 14Е содержит опорную трубу 141Е и несколько индукционных катушек. Опорная труба 141Е установлена около подвижного индукционного стержня, и индукционные катушки 142Е установлены кольцеобразно на внешней стороне опорной трубы 141Е. Таким образом, модуль обнаружения 14Е содержит три индукционные катушки 142Е, установленные на опорной трубе 141Е от верхней опорной пластины 42 к нижней опорной пластине 41 последовательно. Среднюю индукционную катушку 142Е применяют для осуществления возбуждающего действия для того, чтобы верхняя и нижняя индукционные катушки 142Е осуществляли вынужденные колебания.
При применении верхняя опорная пластина 42 гибкого опорного приспособления 40 осуществляет перемещение вниз по направлению к нижней опорной пластине 41 под действием нагрузки транспортного средства, подвижный элемент 13Е осуществляет перемещение вместе с верхней опорной пластиной 42, и подвижный индукционный стержень осуществляет перемещение относительно индукционных катушек 142Е, которые расположены на опорной трубке 141Е. Величина перемещения подвижного элемента 13Е относительно фиксирующего элемента 12Е может быть преобразована за счет разности индуктивности катушки между верхней индукционной катушкой 142Е и нижней индукционной катушкой 142Е. Таким образом, нагрузка транспортного средства может быть рассчитана согласно величине перемещения верхней опорной пластины 42 относительно нижней опорной пластины 41.
Как изображено на Фиг. 7, согласно шестому варианту предлагаемой полезной модели датчик перемещения 11 представляет собой емкостный датчик перемещения, фиксирующий элемент 12F представляет собой полую трубку с верхним отверстием, подвижный элемент 13F представляет собой индукционный стержень и простирается в фиксирующем элементе 12F. Индукционный стержень имеет верхний конец, подсоединенный к верхней опорной пластине 42, изолирующую пленку, нанесенную на внешнюю поверхность индукционного стержня, и по меньшей мере один полюс заземления конденсатора, установленный сквозь индукционный стержень. Модуль обнаружения 14F имеет верхнюю опорную трубку 141F, нижнюю опорную трубку 145F, и диэлектрик 142F. Верхняя опорная трубка 141F и нижняя опорная трубка 145F установлены на внешней поверхности индукционного стержня рядом с изолирующей пленкой. Диэлектрик 142F размещен между верхней опорной трубкой 141F нижней опорной трубкой 145F и индукционным стержнем для образования двух электрических конденсаторов 143F, 144F между верхней опорной трубкой 141F, индукционным стержнем и нижней опорной трубкой 145F.
При применении верхняя опорная пластина 42 гибкого опорного приспособления 40 осуществляет перемещение вниз по направлению к нижней опорной пластине 41 под действием нагрузки транспортного средства, подвижный элемент 13F осуществляет перемещение вместе с опорной пластиной 42, и индукционный стержень осуществляет перемещение относительно верхней опорной трубки 141F и нижней опорной трубки 145F. Диэлектрик 142F распределен между двумя конденсаторами 143F, 144F через сквозное отверстие подвижного элемента 13F, и это может изменять величины емкости двух конденсаторов 143F, 144F. Величина перемещения подвижного элемента 13F относительно фиксирующего элемента 12F может быть преобразована на основании изменения величин емкости двух конденсаторов 143F, 144F. Нагрузка транспортного средства может быть рассчитана согласно величине перемещения верхней опорной пластины 42 относительно нижней опорной пластины 41.
Эквивалентная схема цепи для определения разности величин емкости двух конденсаторов 143F, 144F изображена на Фиг. 8, конденсатор 143F подсоединен к конденсатору 144F последовательно для определения разности величин емкости, индуктивностей, и изменения сопротивления между двумя конденсаторами 143F, 144F для того, чтобы рассчитать вышеуказанную величину перемещения. Согласно предлагаемой полезной модели схема содержит два резистора для образования полумоста, а другой полумост является конденсатором; последующие изменения индукции могут также использовать данный мост, который является полумостом для сопротивления, другой полумост является индуктором, может компенсировать многие изменения, вызываемые окружающей средой, уменьшать ошибку считывания.
Предпочтительными вариантами осуществления полезной модели являются только виды датчиков перемещения, перечисленные в предлагаемой полезной модели, и, следовательно, не ограничивают применение других видов. Каждый из датчиков перемещения 11 может представлять собой лазерный датчик перемещения, датчик перемещения Холла, фотоэлектрический датчик перемещения, магнитный датчик перемещения или вихревой датчик перемещения, и т.п. Таким образом, датчик перемещения, способный измерять величину перемещения между двумя опорными пластинам 41, 42 каждого гибкого опорного приспособления 40, должен быть техническим признаком, раскрываемым в предлагаемой полезной модели.
Модуль обработки/передачи сигнала 20 подсоединен к модулю считывания перемещения 10 для обработки и передачи сигналов, которые обнаружены датчиками перемещения 11 модуля считывания перемещения 10. Кроме того, модуль обработки/передачи сигнала 20 может быть также образован вместе с модулем считывания перемещения 10 как одно целое. Модуль обработки/передачи сигнала 20 содержит несколько процессоров/передатчиков сигнала, соответственно подсоединенных к датчикам перемещения 11 модуля считывания перемещения 10. Кроме того, каждый из процессоров/передатчиков сигнала может представлять собой проводной передатчик сигнала или беспроводной передатчик сигнала, такой как Блютус (Bluetooth), передатчик инфракрасных сигналов или сигналов беспроводной сети, и т.п.
Модуль приема/обработки сигнала 30 подсоединен к модулю обработки/передачи сигнала 20 для приема, обработки и агрегирования сигналов, передаваемые с модуля обработки/передачи 20 проводным или беспроводным (Блютус) способом. Кроме того, модуль приема/обработки сигнала 30 может представлять собой прибор автомобиля, приборный блок, глобальную систему позиционирования (GPS), телефон, мобильное устройство, или компьютер, который установлен на транспортном средстве. Прибор автомобиля имеет дисплей, рабочие кнопки и функцию передачи коротких сообщений (SMS), и может осуществлять передачу обнаруживаемой информации в центр обработки данных. После приема соответствующих сигналов, модуль приема/обработки сигнала 30 может производить вычисления и обеспечивать предупредительную информацию для пользователей или водителей.
В соответствии с вышеупомянутыми конструктивными взаимосвязями и признаками, при применении устройства для измерения нагрузки транспортного средства согласно настоящей полезной модели, каждый из датчиков перемещения 11 модуля считывания перемещения 10 установлен между двумя опорными пластинами 41, 42 каждого гибкого опорного приспособления 40 транспортного средства, и величина перемещения между двумя опорными пластинами 41, 42 может быть обнаружена при помощи датчика перемещения 11 для расчета нагрузки транспортного средства. К тому же, происходит передача обнаруживаемых сигналов на модуль обработки/передачи сигнала 20 и прием и обработка модулем приема/обработки сигнала 30 для обеспечения водителей, центра технического обслуживания или центра управления логистикой четкой и точной информацией о нагрузке транспортного средства.
Кроме того, предлагаемое устройство для измерения нагрузки транспортного средства не требует демонтажа после измерения нагрузки транспортного средства, и это более удобно в применении, по сравнению с обычными путевыми весами. К тому же, так как устройство для измерения нагрузки не требует демонтажа после измерения, пользователь может получать информацию о нагрузке транспортного средства немедленно и в любое время. Следовательно, водитель может немедленно осуществлять контроль состояния транспортного средства, например, при утрате предметов груза во время движения, водитель может получать предупредительный сигнал и может немедленно отреагировать для уменьшения потери и вреда.
Несмотря на то, что в нижеприведенном описании изложены многочисленные характеристики и преимущества предлагаемой полезной модели в сочетании с особенностями конструкции и признаками полезной модели, раскрытые сущности полезной модели носят только иллюстративный характер. Изменения могут быть осуществлены в отношении деталей, в особенности, в отношении формы, размера и расположения частей в пределах принципов полезной модели в полной мере, как указано в широком общеупотребительном значении терминов, используемых в прилагаемой формуле полезной модели.
Реферат
Устройство для измерения нагрузки транспортного средства содержит модуль считывания перемещения, модуль обработки/передачи сигнала, а также модуль приема/обработки сигнала. Модуль считывания перемещения содержит несколько датчиков перемещения, соответственно установленных на гибких опорных приспособлениях системы подвески транспортного средства. Каждый датчик перемещения подсоединен к двум опорным пластинам соответствующего гибкого опорного приспособления для измерения величины перемещения между двумя опорными пластинами. Модуль обработки/передачи сигнала осуществляет передачу сигналов, которые обнаружены датчиками перемещения, на модуль приема/обработки сигнала. Согласно предлагаемой полезной модели устройство для измерения нагрузки транспортного средства может быть удобно установлено на транспортном средстве и может точно определять нагрузку транспортного средства. 11 з.п. ф-лы; 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для измерения изменения нагрузки автомобиля с независимо подвешенными полуосями для управления регулятором торможения по нагрузке
Комментарии