Устройство контроля взвешивания и соответствующий способ для электронных конвейерных весов - RU2504742C2
Код документа: RU2504742C2
Чертежи
Описание
Область техники
Настоящее изобретение относится к устройству контроля взвешивания и к соответствующему способу. Более конкретно, оно относится к устройствам и способам для контроля взвешивания на электронных конвейерных весах, используемых на ленточном конвейере для мониторинга в режиме реального времени непрерывно транспортируемых материалов.
Уровень техники
Современные электронные конвейерные весы, оснащенные полноподвешенным транспортером и используемые в ленточном конвейере для взвешивания непрерывно транспортируемых материалов, представляют собой устройство контроля взвешивания, в котором транспортер оснащен четырьмя датчиками взвешивания, сигналы от которых соединяют в один маршрут для последующей операции накопления вместе с сигналом от датчика скорости, и результаты отображают в накопителе. Принимая во внимание, что в таком устройстве контроля взвешивания четыре сигнала с данными взвешивания объединяют в один маршрут перед накоплением с сигналом с данными скорости, в случае поломки хотя бы одного из датчиков конвейерные весы в целом не будут обеспечивать точность измерений. Причем такого рода поломку трудно обнаружить в процессе работы, и связанные с этим неточные измерения послужат причиной потерь при транспортировке материалов.
Сущность изобретения
Задача настоящего изобретения заключается в преодолении недостатков известных технических решений путем разработки устройства и способа для контроля взвешивания на электронных конвейерных весах, благодаря которым может быть выявлена неправильная работа определенного датчика взвешивания путем изменения режима комбинирования, при этом электронные конвейерные весы смогут по-прежнему выполнять точные измерения даже при повреждении одного из датчиков взвешивания.
В рамках решения поставленной задачи создано устройство контроля взвешивания, содержащее полноподвешенный взвешивающий транспортер, опирающийся на четыре датчика взвешивания, датчик перемещения и накопитель, при этом клеммы вывода сигналов четырех датчиков взвешивания соединены с накопителем по четырем маршрутам, причем накопитель запрограммирован таким образом, что эти четыре маршрута сигналов с данными взвешивания объединяются в три группы сигналов, так что данные взвешивания взвешивающего транспортера включают одну группу главной накопленной суммы полноподвешенного типа и две группы вспомогательных накопленных сумм одноплечевого типа, при этом накопитель содержит компьютер или электронный прибор контроля взвешивания с дисплеем.
Одна из указанных трех групп сигналов с данными взвешивания представляет собой главную накопленную сумму, полученную от комбинации датчиков А, В, С и D взвешивания, тогда как две другие представляют собой вспомогательную накопленную сумму, полученную от комбинации датчиков А и В взвешивания, и вспомогательную накопленную сумму, полученную от комбинации датчиков С и D взвешивания.
Предложенный в изобретении способ контроля взвешивания включает следующие этапы:
a. четыре маршрута получаемых сигналов с данными взвешивания объединяют в три группы сигналов посредством программного модуля процессора, причем одна группа представляет собой сигнал главной накопленной суммы полноподвешенного типа от А1, В1, С1 и D1, а две другие представляют собой сигналы вспомогательных накопленных сумм одноплечевого типа от А1, В1 и С1, D1;
b. определяют сигналы вспомогательных накопленных сумм, полученных от комбинации датчиков А и В взвешивания и от комбинации датчиков С и D взвешивания;
c. сравнивают их онлайн в режиме реального времени;
если разница между сравниваемыми значениями от указанных двух групп вспомогательных накопленных сумм незначительна и находится в пределах заданного диапазона, на дисплее отображают главную накопленную сумму, полученную от комбинации датчиков А, В, С и D взвешивания;
если разница между сравниваемыми значениями от указанных двух групп вспомогательных накопленных сумм значительна и находится вне заданного диапазона, выходные сигналы из двух групп датчиков взвешивания сравнивают по отдельности, определяя тем самым, какой датчик взвешивания неисправен;
d. подают аварийный звуковой сигнал на вспомогательный интегратор, в том случае, если вспомогательная накопленная сумма, полученная от комбинации А и В или С и D датчиков взвешивания находится вне заданного диапазона, при этом из той комбинации датчиков А и В или С и D, где неисправность не обнаружена, выбирают группу с вспомогательной накопленной суммой, которую используют вместо главной накопленной суммы для отображения на дисплее, что позволяет сохранить достоверность взвешивания на конвейерных весах в случае поломки одного из датчиков взвешивания.
Технический результат
Согласно настоящему изобретению, три группы значений накопленных сумм получают путем вычисления трех различных комбинаций выходных сигналов от четырех датчиков взвешивания, при этом накопитель программными средствами выполняет в режиме реального времени сравнение для двух групп значений накопленных сумм; определяет, неисправен ли один из датчиков взвешивания, и тогда подает аварийный сигнал и отображает одну группу значений накопленных сумм от датчиков взвешивания с правильным выходным сигналом. Благодаря этому достоверность взвешивания на электронных конвейерных весах сохраняется даже в случае поломки одного из датчиков взвешивания, что позволяет не останавливать рабочий процесс и получать надежные результаты, не отключая оборудование. Неисправный датчик может быть заменен после завершения всей работы и остановки машины, что позволяет избежать разного рода потерь, связанных с дополнительной поверкой конвейерных весов при замене датчика, и решает проблему падения точности измерения, которое обычно трудно зафиксировать при выходе датчика из строя. Это повышает надежность и точность измерений конвейерных весов и может быть применено для точного и надежного онлайн взвешивания материалов, непрерывно транспортируемых по ленточному конвейеру. Настоящее изобретение характеризуется компактной и рациональной конструкцией и обеспечивает высокую надежность, точность измерений, простоту обслуживания, длительный срок службы и широкую применимость.
Описание чертежей
Фиг.1 схематически поясняет принцип и конструкцию настоящего изобретения.
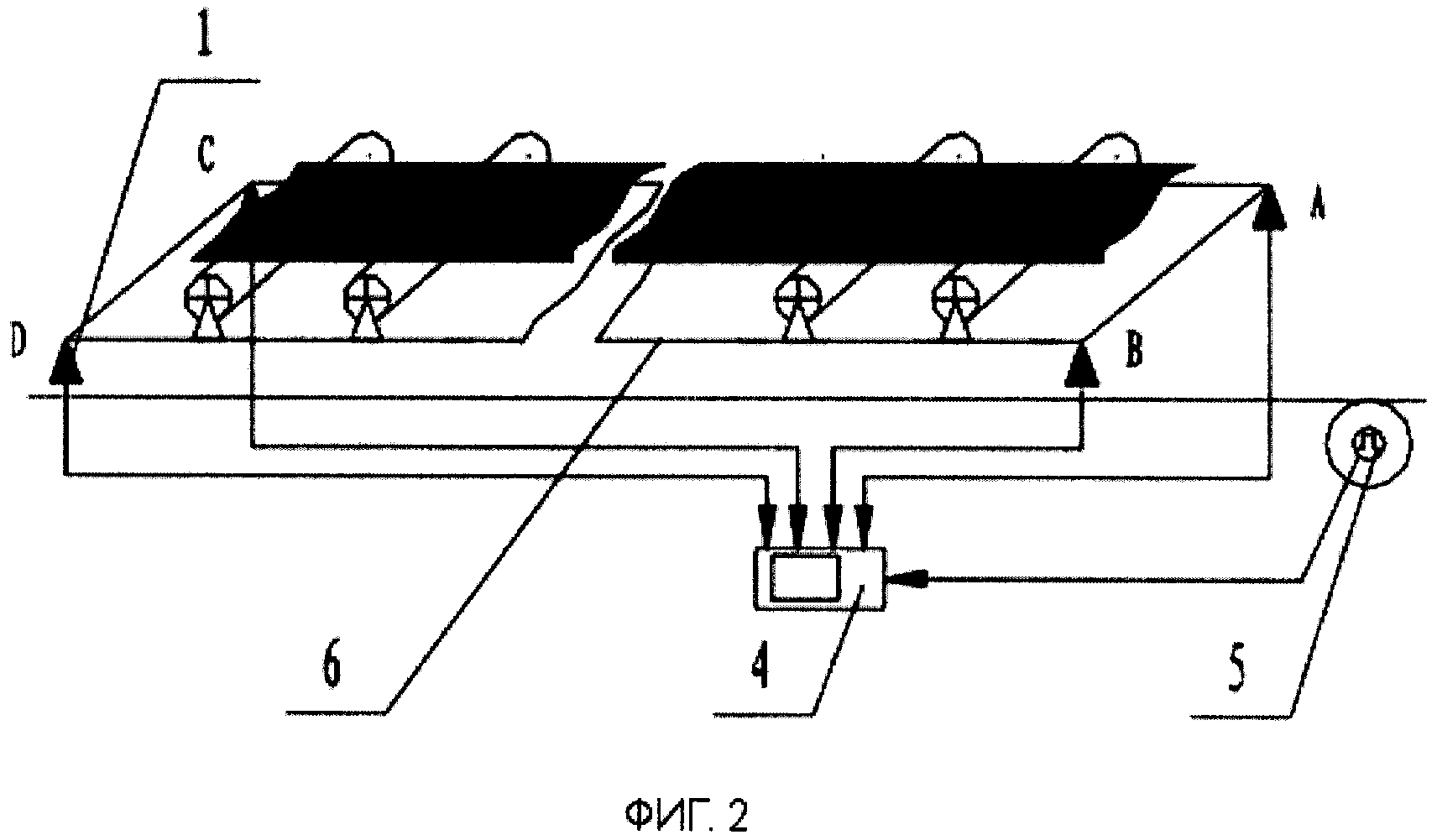
Фиг.2 схематически изображает конструкцию предложенного устройства контроля взвешивания.
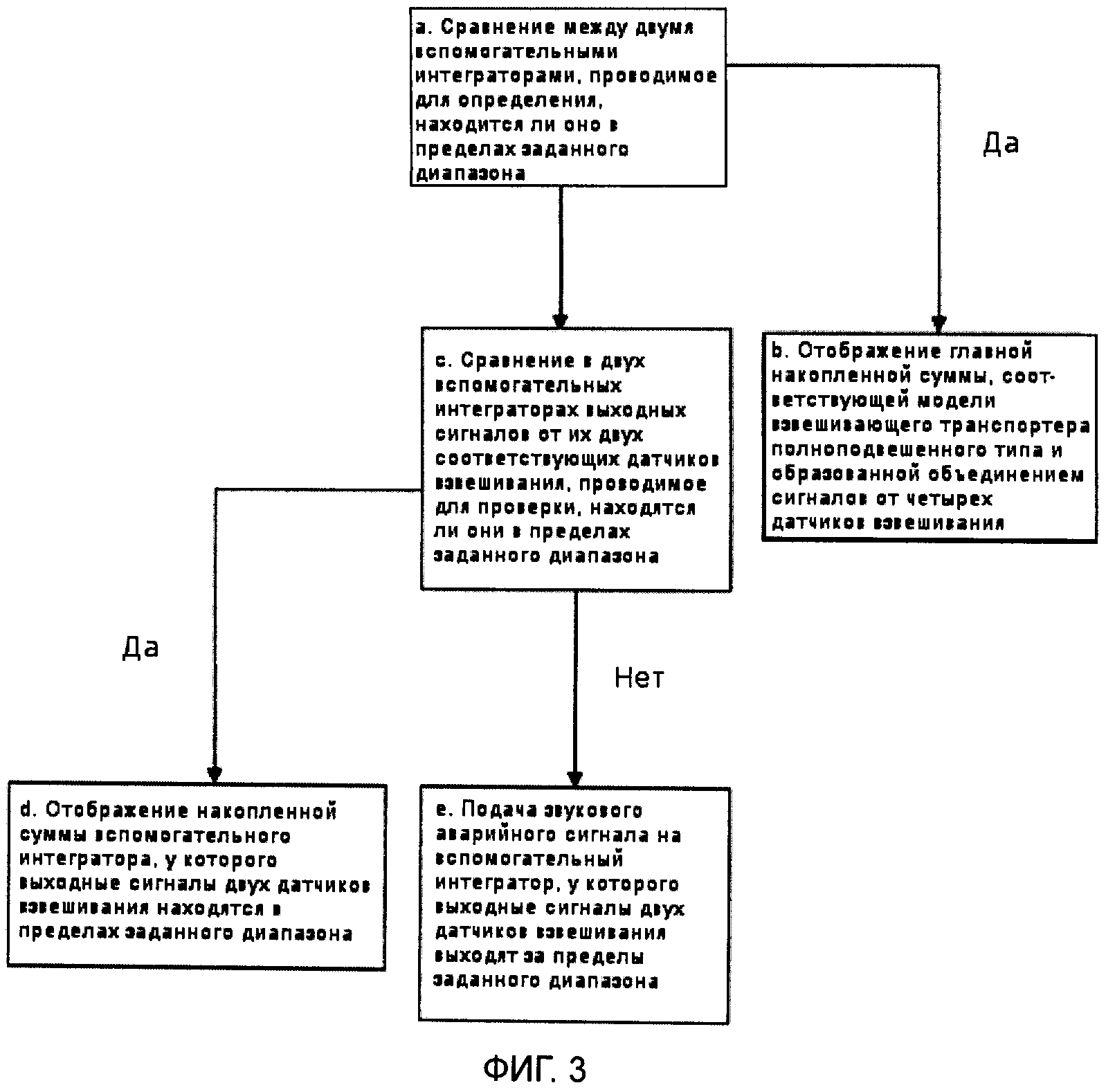
Фиг.3 изображает блок-схему программы сравнения сигналов в настоящем изобретении.
На чертежах используются следующие номера позиций: 1 - датчик взвешивания, 2 - преобразователь сигналов, 3 - вспомогательный интегратор, 4 - накопитель, 5 - датчик перемещения, 6 - взвешивающий транспортер.
Подробное описание вариантов выполнения изобретения
Ниже со ссылкой на приложенные чертежи описаны варианты выполнения изобретения.
Как показано на фиг.1 и 2, предложенное устройство контроля взвешивания состоит из следующих основных частей: четыре датчика (1) А, В, С и D взвешивания, полноподвешенный взвешивающий транспортер (6), опирающийся на указанные четыре датчика (1) взвешивания, датчик (5) перемещения и накопитель (4). Если датчики (1) взвешивания являются аналоговыми, их соединяют с преобразователем (2) сигнала, как показано на Фиг.1. Если датчики (1) взвешивания являются цифровыми, преобразователь (2) сигнала не требуется. Накопитель (4) состоит из следующих основных частей: процессор, формирователь, запоминающее устройство, дисплей и блок питания. В представленном примере в качестве преобразователя (2) сигнала использован 24-разрядный аналого-цифровой преобразователь AD7710, в качестве процессора - 32 - разрядный процессор S3C44B0X, в качестве запоминающего устройства - интегральная схема 39VF160, в качестве формирователя сигнала перемещения - интегральная схема 393, в качестве дисплея - точечная матрица 640×320, в качестве блока питания - источник переменного тока 220 вольт. Процессор включает в себя блок сравнения между собой сигналов с данными взвешивания, два вспомогательных интегратора (3), подсоединенные к этому блоку, и интегральный блок сравнения, подсоединенный между двумя вспомогательными интеграторами (3). Клеммы вывода сигналов четырех датчиков (1) взвешивания соединены с накопителем (4) по четырем отдельным маршрутам. Накопитель (4) запрограммирован таким образом, что четыре маршрута сигналов с данными взвешивания объединяются в три группы, причем одна из этих групп представляет собой главную накопленную сумму, полученную от комбинации датчиков (1) А, В, С и D взвешивания, тогда как две другие представляют собой вспомогательную накопленную сумму, полученную от комбинации датчиков (1) А и В, и вспомогательную накопленную сумму, полученную от комбинации датчиков (1) С и D. Таким образом, данные взвешивания от взвешивающего транспортера (6) образует одну группу главной накопленной суммы полноподвешенного типа и две группы вспомогательных накопленных сумм одноплечевого типа. Сравнение выходных сигналов взвешивающего транспортера 6 выполняется с помощью накопителя. Сравнение, оценка и управление происходят в режиме реального времени. Если одна из групп сигналов оказывается сбойной, накопитель 4 сразу же оценивает ситуацию, выполняет необходимое управление и отображает правильную накопленную сумму. Накопитель (4) может также включать в себя компьютер, позволяющий упростить схему и расчет управления взвешивающим транспортером (6) благодаря использованию соответствующего программного обеспечения.
Предложенный способ контроля взвешивания содержит следующие этапы: подключение к накопителю (4), содержащему компьютер или электронное устройство контроля взвешивания с дисплеем, четырех датчиков (1) взвешивания, установленных на полноподвешенном взвешивающем транспортере (6), и датчика (5) перемещения, установленного на электронных конвейерных весах; выполнение вычислений для трех различных комбинаций независимых выходных сигналов от четырех датчиков (1) взвешивания посредством программного управления процессором с получением трех рассчитанных результатов различных комбинаций; при этом взвешивающий транспортер (6) на электронных конвейерных весах представлен как один взвешивающий транспортер полноподвешенного типа и два взвешивающих транспортера (6) одноплечевого типа за счет различных комбинаций датчиков (1) взвешивания, что обеспечивает возникновение трех групп значений накопленных сумм, две из которых, от двух взвешивающих транспортеров одноплечевого типа, сравниваются онлайн в режиме реального времени. Если разница между этими двумя группами значений накопленных сумм незначительна и находится в заданном диапазоне, датчики взвешивания считаются исправными. Накопитель (4) отображает главную накопленную сумму, соответствующую модели взвешивающего транспортера (6) полноподвешенного типа и образованную сигналами датчиков А, В, С и D. Если же разница между двумя группами значений накопленных сумм значительна и выходит за пределы заданного диапазона, выходные сигналы датчиков (1) взвешивания в каждой группе сравнивают по отдельности, посредством чего определяется, не вышел ли из строя тот или иной датчик (1) взвешивания. В этом случае накопитель (4) будет отображать вспомогательную накопленную сумму той группы сигналов, которая получена от датчиков (1) с правильным выходным сигналом и соответствует модели взвешивающего транспортера одноплечевого типа. Таким образом, надежность взвешивания на электронных конвейерных весах сохраняется даже при поломке одного из датчиков взвешивания.
Выходные сигналы от датчиков (1) А, В, С и D взвешивания, пройдя через преобразователь (2) сигнала (в котором нет необходимости, если выходные сигналы от датчиков (1) А, В, С и D являются цифровыми), образуют четыре независимых маршрута сигналов А1, В1, С1 и D1 и поступают в процессор для обработки. Сигнал с данными скорости от датчика (5) перемещения, пройдя через формирователь, превращается в цифровой сигнал с данными скорости, и также поступает в процессор для обработки. Два вспомогательных интегратора (3) в программных модулях процессора генерируют две вспомогательные накопленные суммы электронных конвейерных весов путем объединения сигналов с данными взвешивания и цифровых сигналов с данными скорости от двух групп А1, В1 и С1, D1 соответственно. Имеющийся в процессоре интегральный блок сравнения выполняет программным модулем в режиме реального времени сравнение, оценку и контроль вспомогательных накопленных сумм от двух вспомогательных интеграторов (3). При нормальных рабочих условиях в качестве главной накопленной суммы электронных конвейерных весов используется накопленная сумма, соответствующая модели полноподвешенного взвешивающего транспортера (6) и составленная из данных от четырех датчиков (1) взвешивания. Если разница между указанными группами значений находится в пределах заданного диапазона, процессор отправляет на дисплей для отображения эту главную накопленную сумму; если же разница между ними выходит за пределы заданного диапазона, блок сравнения сигналов с данными взвешивания посредством программного модуля процессора сравнивает сигналы А1, В1 и С1, D1 в двух группах от двух вспомогательных интеграторов (3) по отдельности, причем если разница между сигналами А1 и В1 находится в пределах заданного диапазона, процессор отправляет на дисплей для отображения накопленную сумму от вспомогательных интеграторов (3) для сигналов А1 и В1 и подает звуковой аварийный сигнал в отношении цифровых сигналов С1 и D1 во вспомогательных интеграторах (3). Если же в упомянутом случае за пределы заданного диапазона выходит разница между сигналами А1 и В1, процессор отправляет на дисплей для отображения накопленную сумму от вспомогательных интеграторов (3) для сигналов С1 и D1 и подает звуковой аварийный сигнал в отношении цифровых сигналов А1 и В1 во вспомогательных интеграторах (3). В отличие от описанных выше случаев, для электронных конвейерных весов могут быть заданы три действенные комбинации, не требующие изменений в конструкции, если не считать изменения функции шарнирной точки между датчиком (1) взвешивания и взвешивающим транспортером (6). В полноподвешенном взвешивающем транспортере (6) I типа все шарнирные точки между четырьмя датчиками (1) А, В, С, D взвешивания и взвешивающим транспортером (6) служат точками измерения силы, и в этом случае электронные конвейерные весы путем комбинирования и трансформации превращаются в полноподвешенный взвешивающий транспортер (6). Во взвешивающем одноплечевом транспортере (6) II типа шарнирные точки между датчиками (1) А, В взвешивания и взвешивающим транспортером (6) служат только точками опоры, тогда как шарнирные точки между датчиками (1) взвешивания С, D и взвешивающим транспортером (6) по-прежнему служат точками измерения силы, и в этом случае электронные конвейерные весы путем комбинирования и трансформации превращаются во взвешивающий транспортер (6) одноплечевого типа, причем шарнирные точки между датчиками (1) А, В взвешивания и взвешивающим транспортером (6) используются как точки опоры, а шарнирные точки между датчиками (1) С, D взвешивания и взвешивающим транспортером (6) используются как точки измерения силы. И во взвешивающем одноплечевом транспортере (6) III типа шарнирные точки между датчиками (1) взвешивания А, В и взвешивающим транспортером (6) служат точками измерения силы, тогда как шарнирные точки между датчиками (1) С, D взвешивания и взвешивающим транспортером (6) служат точками опоры, и в этом случае электронные конвейерные весы путем комбинирования и трансформации превращаются в взвешивающий транспортер (6) одноплечевого типа, причем шарнирные точки между датчиками (1) А, В взвешивания и взвешивающим транспортером (6) используются как точки измерения силы, а шарнирные точки между датчиками (1) С, D взвешивания и взвешивающим транспортером (6) используются как точки опоры. В случае неисправности, до тех пор пока один из двух вспомогательных интеграторов (3) является исправным, система электронных конвейерных весов будет продолжать работать нормально. Причем в этом случае электронные конвейерные весы путем комбинирования и трансформации превращаются в взвешивающий транспортер (6) одноплечевого типа, что позволяет осуществлять непрерывные измерения в системе взвешивания и не останавливать ее. Замену датчика взвешивания можно не проводить до штатной остановки оборудования, в результате чего удается избежать потерь, связанных с дополнительной поверкой конвейерных весов при замене датчика и с неточностью измерений. Тем самым решается проблема неточных измерений, которая обычно возникает при отказе датчика во время транспортировки, что позволяет повысить надежность системы электронных конвейерных весов.
На Фиг.3 представлена блок-схема сравнения сигнала, согласно которой.
a. Сравнение между двумя вспомогательными интеграторами (3), проводимое для определения, находится ли оно в пределах установленного диапазона.
b. Да. Отображение главной накопленной суммы, соответствующей модели взвешивающего транспортера (6) полноподвешенного типа и образованной объединением сигналов от четырех датчиков (1) взвешивания.
c. Нет. Сравнение в двух вспомогательных интеграторах (3) выходных сигналов двух датчиков взвешивания, проводимое для проверки, находятся ли они в пределах установленного диапазона.
d. Да. Отображение накопленной суммы вспомогательного интегратора, полученной с двух датчиков (1) взвешивания, у которых выходные сигналы находятся в пределах установленного диапазона.
e. Нет. Подача звукового аварийного сигнала на вспомогательные интеграторы, если выходные сигналы двух датчиков (1) взвешивания выходят за пределы установленного диапазона.
Реферат
Настоящее изобретение относится к устройству контроля взвешивания на электронных конвейерных весах, содержащему четыре датчика (1) взвешивания, подвешенный взвешивающий транспортер (6), датчик (5) перемещения и накопитель (4). Указанные четыре датчика (1) взвешивания последовательно соединены с накопителем (4) с образованием группы главных накопленных значений и двух групп вспомогательных накопленных значений на основе выходных сигналов этих четырех датчиков (1) взвешивания. Указанные две группы вспомогательных накопленных значений сравнивают между собой. Если разница между этими группами вспомогательных накопленных значений находится в пределах заданного диапазона, на дисплее отображают главное накопленное значение. Если разница между этими группами вспомогательных накопленных значений находится вне заданного диапазона, определяют неисправный датчик (1) взвешивания и отображают правильное вспомогательное накопленное значение. Также изобретение относится к соответствующему способу контроля взвешивания на электронных конвейерных весах. Технический результат заключается в сохранении достоверности взвешивания на электронных конвейерных весах даже в случае поломки одного из датчиков взвешивания, что позволяет не останавливать рабочий процесс и получать надежные результаты, не отключая оборудование. Неисправный датчик может быть заменен после завершения всей работы и остановки машины, что позволяет избежать разного рода потерь, связанных с дополнительной поверкой конвейерных весов при замене датчика, и решает проблему падения точности измерения, которое обычно трудно зафиксировать при выходе да�
Формула
а. четыре маршрута получаемых сигналов с данными взвешивания объединяют в три группы сигналов посредством программного модуля процессора, причем одна группа представляет собой сигнал главной накопленной суммы полноподвешенного типа от A1, B1, C1 и D1, а две другие представляют собой сигналы вспомогательных накопленных сумм одноплечевого типа от А1, В1 и C1, D1;
b. определяют сигналы вспомогательных накопленных сумм, полученных от комбинации датчиков (1) А и В взвешивания и от комбинации датчиков (1) С и D взвешивания;
с. сравнивают их онлайн в режиме реального времени;
если разница между сравниваемыми значениями от указанных двух групп вспомогательных накопленных сумм незначительна и находится в пределах заданного диапазона, на дисплее отображают главную накопленную сумму, полученную от комбинации датчиков (1) А, В, С и D взвешивания;
если разница между сравниваемыми значениями от указанных двух групп вспомогательных накопленных сумм значительна и находится вне заданного диапазона, выходные сигналы из двух групп датчиков взвешивания сравнивают по отдельности, определяя тем самым, какой датчик взвешивания неисправен;
d. подают аварийный звуковой сигнал на вспомогательный интегратор, в том случае, если вспомогательная накопленная сумма, полученная от комбинации А и В или С и D датчиков (1) находится вне заданного диапазона, при этом из той комбинации датчиков (1) А и В или С и D, где неисправность не обнаружена, выбирают группу с вспомогательной накопленной суммой, которую используют вместо главной накопленной суммы для отображения на дисплее, что позволяет сохранить достоверность взвешивания на конвейерных весах в случае поломки одного из датчиков (1) взвешивания.
Комментарии