Герметизированный динамометрический элемент - RU2317530C2
Код документа: RU2317530C2
Чертежи
Описание
Изобретение относится к динамометрическим элементам для измерения механической нагрузки и силы, содержащим упругое тело, снабженное чувствительными средствами для измерения в нем напряжения или деформации этого тела в ответ на измеряемую нагрузку или силу.
Существует большая группа недорогих и не очень точных датчиков нагрузки и силы, в которых упругие тела различной формы, например диски или колеса со спицами, снабжены различными тензодатчиками, индуктивными, емкостными или оптическими датчиками. Такие датчики нагрузки или силы зависимы от точки приложения нагрузки или силы и используются главным образом производителями оборудования в качестве простых датчиков силы, акселерометров и джойстиков.
Более конкретно настоящее изобретение относится к точным динамометрическим элементам с упругим телом, включающим базовый конец, воспринимающую часть для восприятия нагрузки или силы, по меньшей мере две балки, соединяющих указанные базовый конец и воспринимающую часть, и чувствительные средства, предназначенные для восприятия напряжения в упругом теле или деформации упругого тела, обусловленных измеряемой нагрузкой или силой.
Большинство производимых точных динамометрических элементов с тензодатчиками и балками выполнены в виде известного классического механизма Робервала с высокопрочным алюминиевым упругим телом, содержащим базовый конец для установки динамометрического элемента на опорной конструкции, воспринимающую часть для восприятия нагрузки или силы, к которой собственно может прикладываться нагрузка или сила, и две балки, соединяющие базовый конец и воспринимающую часть. Часто между двумя вышеуказанными балками бывает установлена третья балка. Тензодатчики установлены в тех местах на балках, где напряжение, обусловленное измеряемой нагрузкой или силой, имеет максимальное и минимальное значение.
Такая конструкция совершенствовалась на протяжении многих лет, в результате чего достигнута довольно высокая точность. Однако традиционно используемая в ней герметизация тензодатчиков силиконовым каучуком во избежание проблем с креплением и снижением сопротивления изоляции, возникающим во влажной среде, а также присущая тензодатчикам чувствительность к перегрузкам, обусловленная технологией, приводят к тому, что такие динамометрические элементы не выдерживают жестких условий производственной среды. Кроме того, для взаимного соединения тензодатчиков, распределенных по одному или нескольким балкам, и соединения их с сигнальным кабелем с последующей герметизацией необходимы дополнительные производственные операции, которые являются довольно трудоемкими и дорогостоящими.
Целью настоящего изобретения является создание высокоточных динамометрических элементов вышеописанного типа, снабженных чувствительными средствами, которые установлены в герметизированных полостях и с высокой точностью измеряют нагрузку или силу, прикладываемую к динамометрическому элементу, в условиях производственной среды.
Согласно настоящему изобретению эта цель достигнута в динамометрическом элементе указанного высокоточного типа, в котором по меньшей мере одна из указанных балок образует рычаг, соединяющий воспринимающую часть для восприятия нагрузки или силы и гибкую стенку чувствительной камеры, расположенную на базовом конце, причем чувствительная камера включает указанные чувствительные средства, гибкая стенка способна деформироваться под действием указанного рычага в результате смещения воспринимающей части, а чувствительные средства способны измерять деформацию гибкой стенки или напряжение в гибкой стенке.
Таким образом, согласно настоящему изобретению измеряемая нагрузка или сила может быть измерена различными датчиками, которые все изолированы от окружающей среды стенками чувствительных камер, что позволяет динамометрическому элементу работать в неблагоприятной среде.
Согласно настоящему изобретению в предпочтительном варианте выполнения динамометрического элемента чувствительная камера содержит датчики для измерения деформации гибкой стенки или напряжения в гибкой стенке. Важным преимуществом этого варианта выполнения настоящего изобретения является возможность усреднения температурных воздействий, а также возможность компенсации воздействия изгибающих сил посредством регулировки относительной чувствительности датчиков.
В одном из вариантов выполнения динамометрического элемента согласно настоящему изобретению чувствительные средства установлены на поверхности держателя датчиков, обращеной к гибкой стенке, для измерения деформации этой стенки. Этот вариант выполнения представляет собой систему датчиков, которую вследствие правильно заданных расстояний между различными частями датчиков просто установить в динамометрическом элементе, в особенности если указанная поверхность является плоской. Кроме того, на задней стороне держателя датчиков можно установить электронный измерительный модуль.
Еще в одном динамометрическом элементе согласно настоящему изобретению чувствительные средства установлены на держателе датчиков, который в свою очередь установлен на стержне, по существу перпендикулярном к гибкой стенке. Такой динамометрический элемент удобно регулировать, поскольку зазоры между датчиками и соответствующими стенками чувствительной камеры легкодоступны. Кроме того, в этом варианте выполнения настоящего изобретения на задней стороне держателя датчиков можно установить электронный измерительный модуль.
В предпочтительном варианте выполнения динамометрического элемента согласно настоящему изобретению чувствительные средства включают систему датчиков, содержащую ребра, установленные на гибкой стенке по существу перпендикулярно к ней, причем на одном или нескольких ребрах установлены датчики, способные измерять деформацию гибкой стенки. Преимуществом этого варианта выполнения настоящего изобретения является очень высокая чувствительность к измеряемой нагрузке и силам при значительной нечувствительности к напряжениям, обусловленным установкой динамометрического элемента на его основании.
Еще в одном предпочтительном варианте выполнения динамометрического элемента согласно настоящему изобретению чувствительные средства включают систему датчиков, содержащую ребра, установленные на гибкой стенке по существу перпендикулярно к ней, причем по меньшей мере между двумя ребрами установлены датчики, способные измерять деформацию гибкой стенки. Преимуществом этого варианта выполнения настоящего изобретения также является очень высокая чувствительность к измеряемой нагрузке и силам и удобство регулировки датчиков, поскольку зазоры между датчиками и соответствующими ребрами легкодоступны.
В вариантах выполнения предлагаемых динамометрических элементов с использованием ребер ширина рычагов и ребер меньше, чем ширина чувствительной камеры, причем обеспечена возможность деформации гибкой стенки в области между внутренней стенкой чувствительной камеры и краями рычагов и ребер.
В вариантах выполнения предлагаемых динамометрических элементов с использованием ребер эти ребра предпочтительно выполнены в виде отдельных элементов, установленных на гибкой стенке. Тем самым достигается преимущество, поскольку отпадает необходимость в механической обработке довольно тонких ребер. Вместо этого используют процесс установки ребер в виде отдельных элементов на коротких штырях, выполненных на гибкой стенке, или непосредственно на гибкой стенке при минимальных затратах.
Еще в одном предпочтительном варианте выполнения динамометрических элементов согласно настоящему изобретению чувствительные средства содержат по меньшей мере один датчик напряжения, установленный на гибких стенках для измерения напряжения в этих гибких стенках. Преимущество этого варианта выполнения заключается в наличии закрытой чувствительной камеры, которая экранирует датчики от жестких условий окружающей среды.
Еще в одном предпочтительном варианте выполнения динамометрических элементов согласно настоящему изобретению чувствительные средства содержит по меньшей мере один тензодатчик, установленный на гибких стенках для измерения напряжения в этих гибких стенках. Преимущество этого варианта выполнения заключается в наличии закрытой чувствительной камеры, которая экранирует датчики от жестких условий окружающей среды, и в возможности осуществления простого и компактного электрического соединения тензодатчиков.
В одном из вариантов выполнения динамометрического элемента согласно настоящему изобретению, в котором только две балки соединены с базовым концом и воспринимающей частью динамометрического элемента, по меньшей мере одна балка может предпочтительно составлять рычаг, действующий на гибкую стенку. Преимущество заключается в простоте конструкции и отсутствии погрешностей вследствие влияния упругости дополнительных рычагов.
В варианте выполнения динамометрического элемента согласно настоящему изобретению, в котором чувствительные средства установлены на держателе датчиков, который в свою очередь установлен на коротком стержне, по существу перпендикулярном гибкой стенке, на держателе датчиков установлены электроды, обращенные к гибкой стенке. Преимущество этого варианта выполнения настоящего изобретения заключается в довольно большом изменении расстояния между электродами и гибкой стенкой в случае, когда электроды установлены на держателе датчиков на некотором расстоянии от короткого стержня.
Еще в одном варианте выполнения динамометрического элемента согласно настоящему изобретению чувствительные средства содержит два отдельных держателя датчиков, которые расположены один над другим и каждый из которых установлен на коротком стержне, по существу перпендикулярном гибкой стенке, причем на каждом из держателей датчиков установлены электроды, обращенные к гибкой стенке. В этом варианте выполнения настоящего изобретения изменение формы гибкой стенки используется для увеличения расстояние от электрода до гибкой стенки на одном держателе датчиков и уменьшения расстояния от электрода до гибкой стенки на другом держателе при деформации этой гибкой стенки. Преимущество этого варианта выполнения заключается в том, что наклон держателя электродов, установленного на коротком стержне, вносит лишь малые ошибки измерения, поскольку, например, увеличение расстояния на одном конце держателя электродов в значительной степени компенсируется соответствующим уменьшением расстояния на другом конце держателя электродов.
В предпочтительном варианте выполнения настоящего изобретения с двумя отдельными держателями датчиков два отдельных рычага входят в контакт с гибкой стенкой, предпочтительно в местах расположения двух коротких стержней, несущих два держателя датчиков. Преимущество этого варианта выполнения настоящего изобретения заключается в сильной деформации гибкой стенки непосредственно в месте расположения чувствительных средств.
В одном из вариантов выполнения настоящего изобретения датчики для измерения напряжения, прикрепленные к гибкой стенке, приводятся в действие двумя рычагами, входящими в контакт с гибкой стенкой, предпочтительно в местах, где воздействие рычагов приводит к максимальной деформации датчиков напряжения. Преимущество, достигаемое в этом варианте выполнения настоящего изобретения, заключается в сильной деформации гибкой стенки непосредственно в месте расположения чувствительных средств.
Еще в одном варианте выполнения динамометрического элемента согласно настоящему изобретению с ребрами, установленными на гибкой стенке, два рычага контактируют с гибкой стенкой предпочтительно в местах, где воздействие рычагов приводит к максимальному отклонению ребер. Преимущество, достигаемое в этом варианте выполнения настоящего изобретения, заключается в сильном отклонении ребер благодаря сильной деформации гибкой стенки.
В предпочтительном варианте выполнения динамометрического элемента согласно настоящему изобретению базовый конец и воспринимающая часть для восприятия нагрузки удлинены с формированием S-образного динамометрического элемента. Преимущество, достигнутое в этом варианте выполнения настоящего изобретения, состоит в возможности измерения сил натяжения и висячих грузов.
Еще в одном предпочтительном варианте выполнения динамометрического элемента согласно настоящему изобретению базовый конец удлинен с формированием динамометрического элемента с некритическими установочными средствами. Преимущество, достигнутое в этом варианте выполнения настоящего изобретения, заключается в возможности создания динамометрических элементов очень высокой точности, которые в то же время могут быть установлены на шероховатых поверхностях без каких-либо требований к моменту затяжки крепежных винтов.
Еще в одном предпочтительном варианте выполнения динамометрического элемента согласно настоящему изобретению базовый конец снабжен средствами установки динамометрического элемента на вертикальной поверхности. Преимущество, достигнутое в этом варианте выполнения, основано на том факте, что во многих случаях установка элемента возможна только на вертикальных поверхностях.
Еще в одном предпочтительном варианте выполнения динамометрического элемента согласно настоящему изобретению гибкая часть рычага, действующего на гибкую стенку, установлена на некотором расстоянии от воспринимающей части для приема нагрузки в направлении гибкой стенки. Преимущество, достигнутое в этом варианте выполнения, заключается в возможности оптимизации действительной длины рычага по отношению к толщине гибкой стенки при различных допустимых нагрузках динамометрического элемента.
Еще в одном предпочтительном варианте выполнения динамометрического элемента согласно настоящему изобретению базовый конец и воспринимающая часть для восприятия нагрузки удлинены в виде массивных надставок. Преимущество, достигнутое в этом варианте выполнения настоящего изобретения, заключается в возможности снабдить динамометрический элемент крепкими установочными частями, выполненными отдельно от чувствительных частей системы датчиков.
Еще в одном предпочтительном варианте выполнения динамометрического элемента согласно настоящему изобретению базовый конец и воспринимающая часть для восприятия нагрузки удлинены вверх и вниз. Преимущество, достигнутое в этом варианте выполнения настоящего изобретения, заключается в большом расстоянии между балками, которые обеспечивают создание динамометрического элемента, способного противостоять нагрузкам, прикладываемым эксцентрически.
Еще в одном предпочтительном варианте выполнения динамометрического элемента согласно настоящему изобретению гибкая стенка имеет уменьшенную толщину в области рядом с прочной стенкой чувствительной камеры. Преимущество, достигнутое в этом варианте выполнения настоящего изобретения, заключается в том, что деформации гибкой стенки главным образом определяются размерами гибкой стенки.
Еще в одном варианте выполнения настоящего изобретения рычаг выполнен как продолжение гибкой стенки, так что гибкая стенка составляет часть рычага, действующего на гибкую стенку. Чувствительные средства в этом варианте выполнения настоящего изобретения предпочтительно представляют собой датчик измерения напряжения, и этот вариант выполнения дает возможность измерения почти чистого растяжения и сжатия в гибкой стенке.
В предпочтительных вариантах выполнения динамометрических элементов согласно настоящему изобретению вышеупомянутые чувствительные средства являются емкостными. Преимущества, достигнутые с использованием систем с емкостными датчиками, заключаются в очень высокой чувствительности к силам и нагрузкам, приложенным к динамометрическим элементам и в бесконтактном способе измерения, который позволяет выдержать удары и перегрузки, поскольку перегрузкам подвергается только упругое тело, а не система датчиков.
В предпочтительных вариантах выполнения динамометрических элементов согласно настоящему изобретению вышеупомянутые чувствительные средства являются индуктивными. Преимущества, достигнутые с использованием систем с индуктивными датчиками, заключаются в возможности работы в экстремальных условиях окружающей среды и в бесконтактном способе измерения, который позволяет выдержать удары и перегрузки, поскольку перегрузкам подвергается только упругое тело, а не система датчиков.
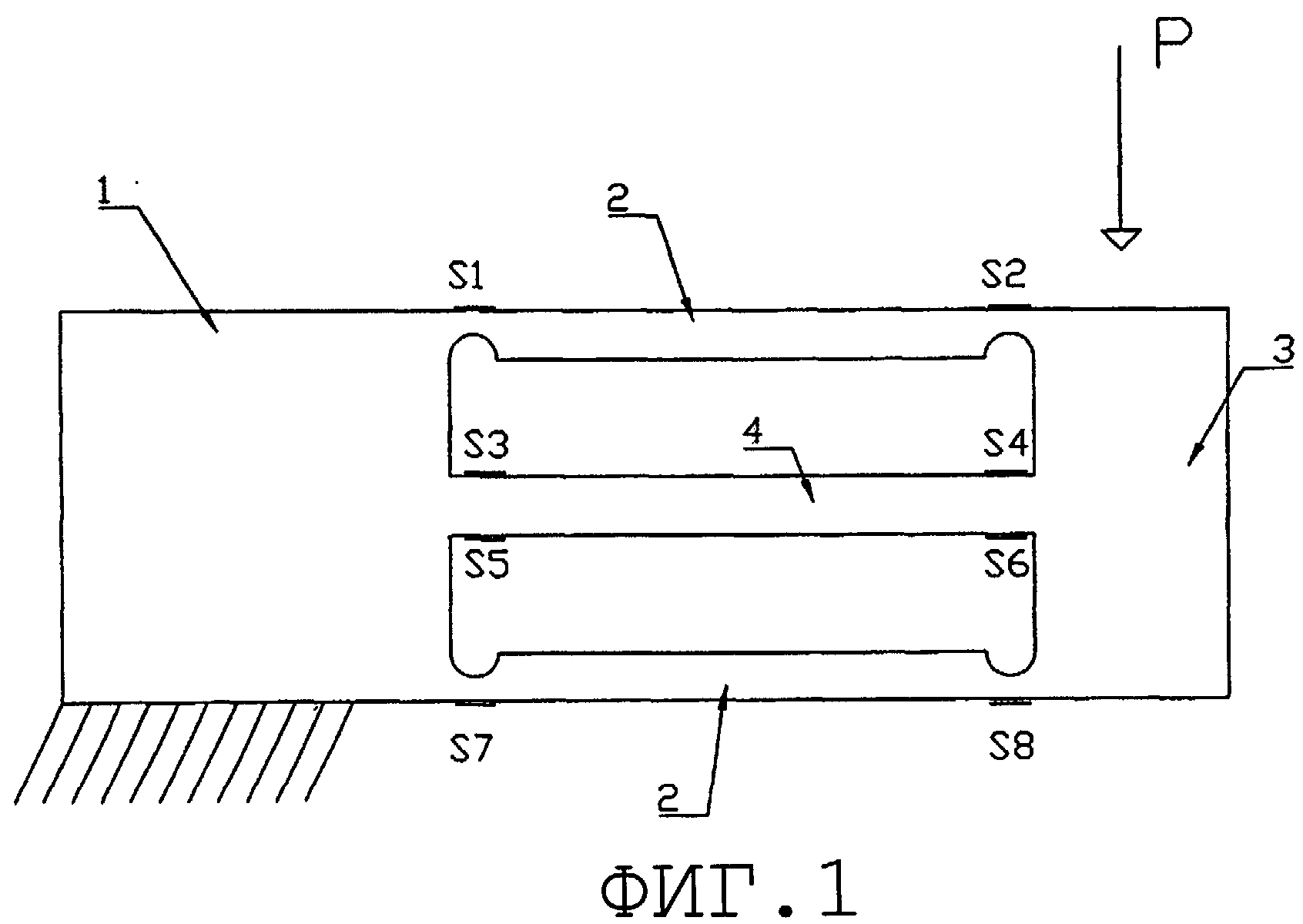
На фиг.1 в качестве аналога показан широко используемый вариант выполнения динамометрического элемента с тензодатчиками,
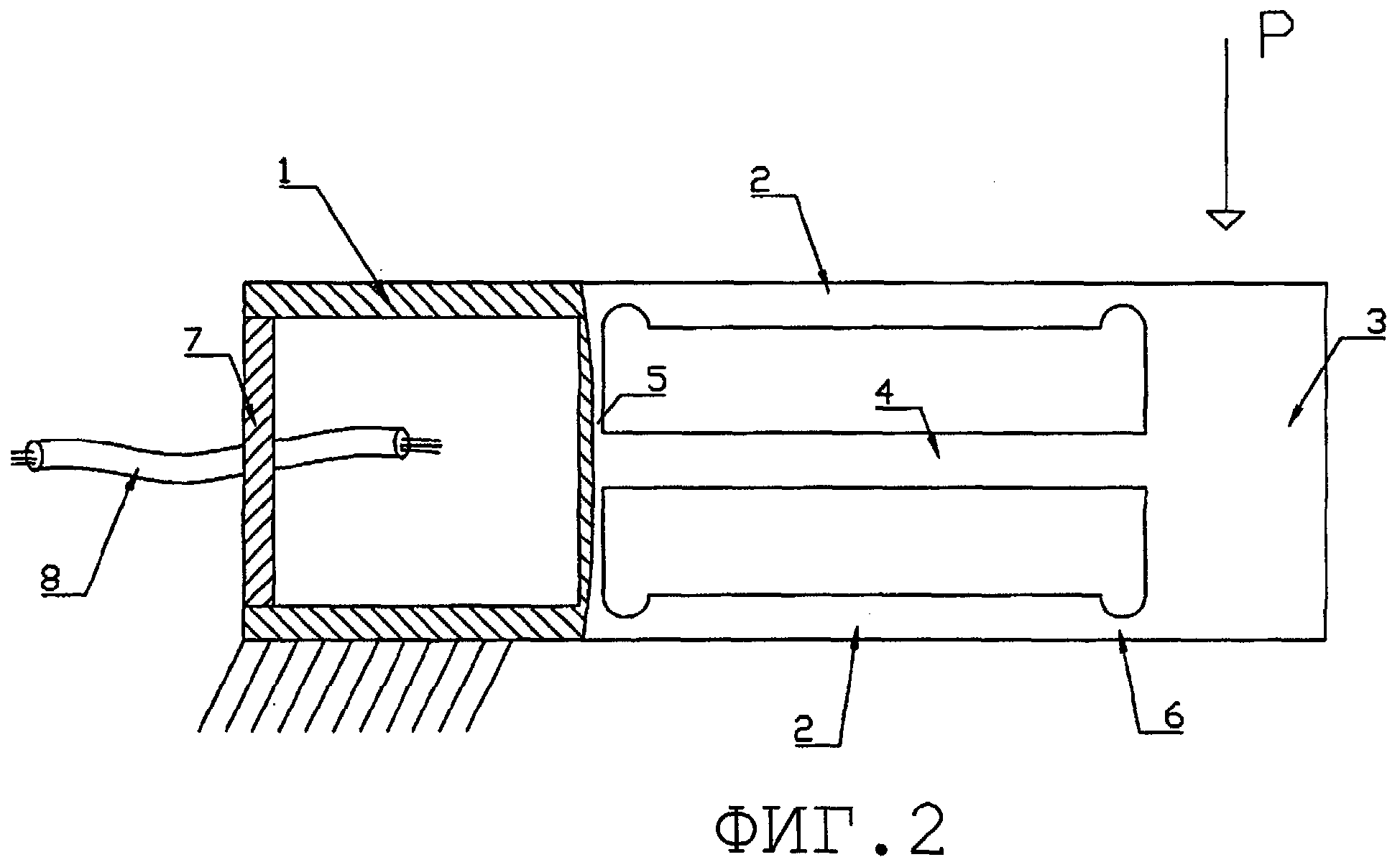
на фиг.2 показан базовый вариант выполнения настоящего изобретения и изображен рычаг, соединяющий воспринимающую часть для восприятия нагрузки и гибкую стенку,
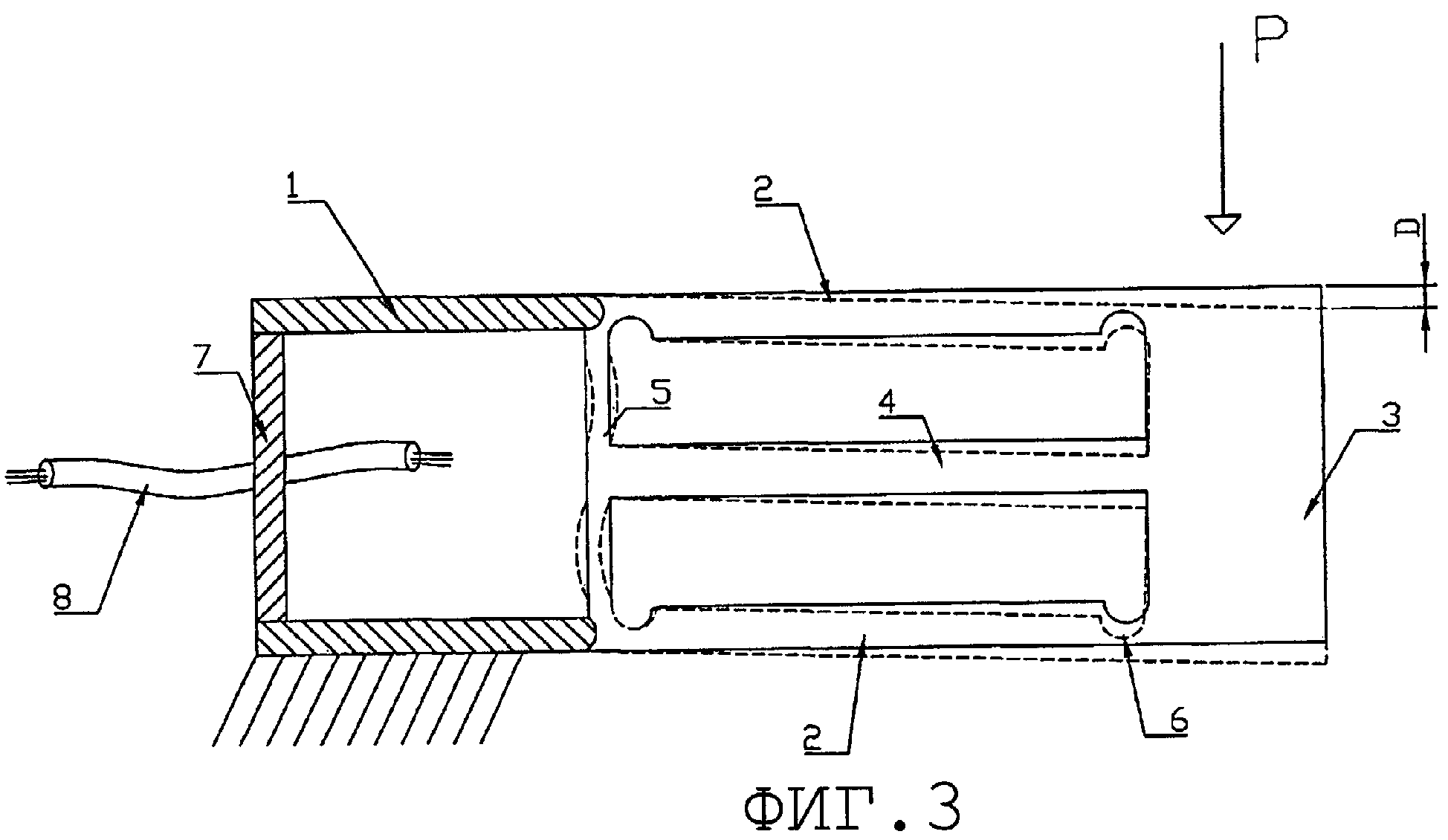
на фиг.3 проиллюстрирована деформация различных частей базового варианта выполнения настоящего изобретения, изображенного на фиг.2, для наглядности чертеж увеличен,
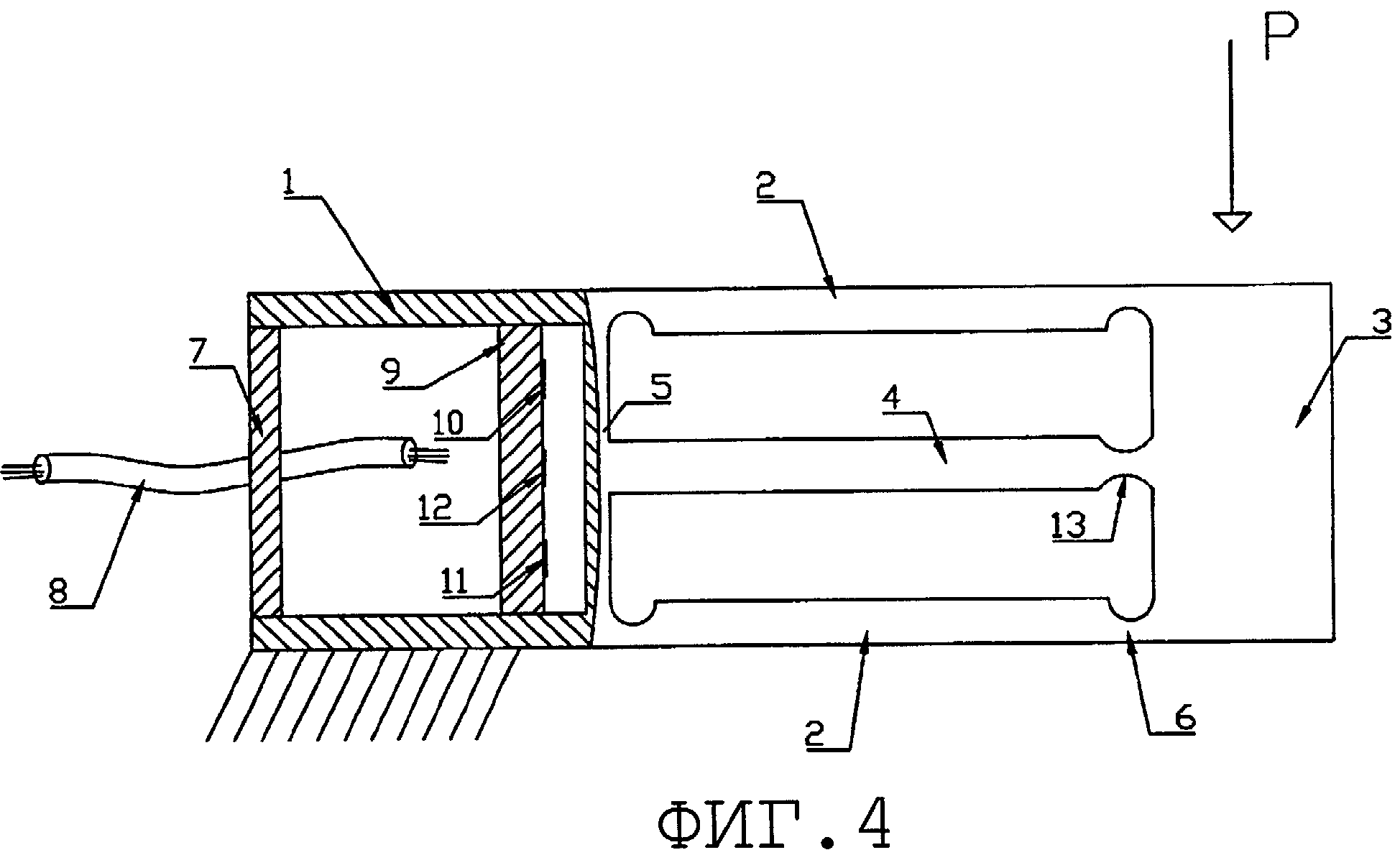
на фиг.4 показан вариант выполнения настоящего изобретения с емкостным или индуктивным чувствительными средствами для измерения деформации гибкой стенки,
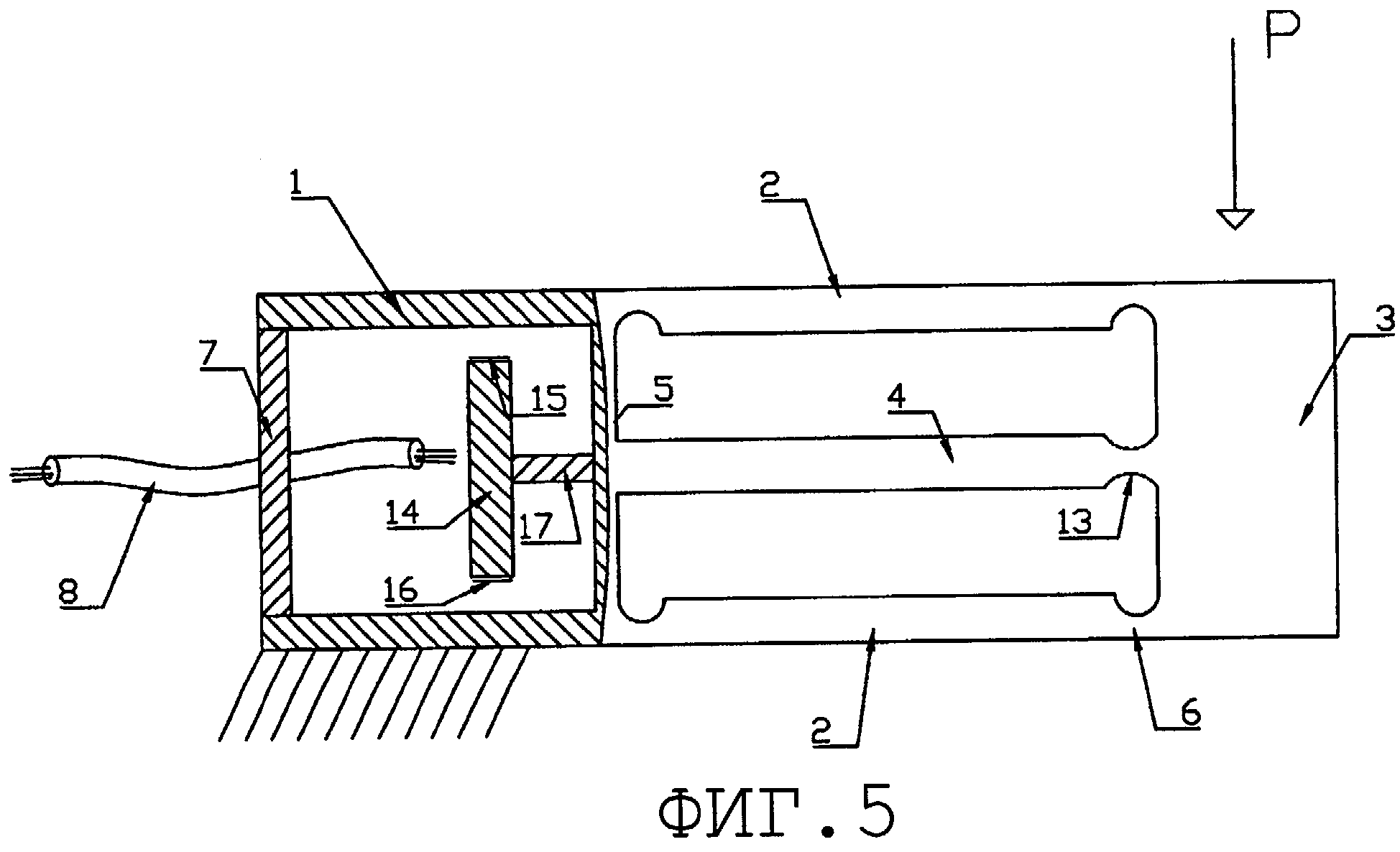
на фиг.5 показан вариант выполнения настоящего изобретения, в котором для измерения смещений, обусловленных деформацией гибкой стенки, использованы емкостные или индуктивные чувствительные средства второго типа,
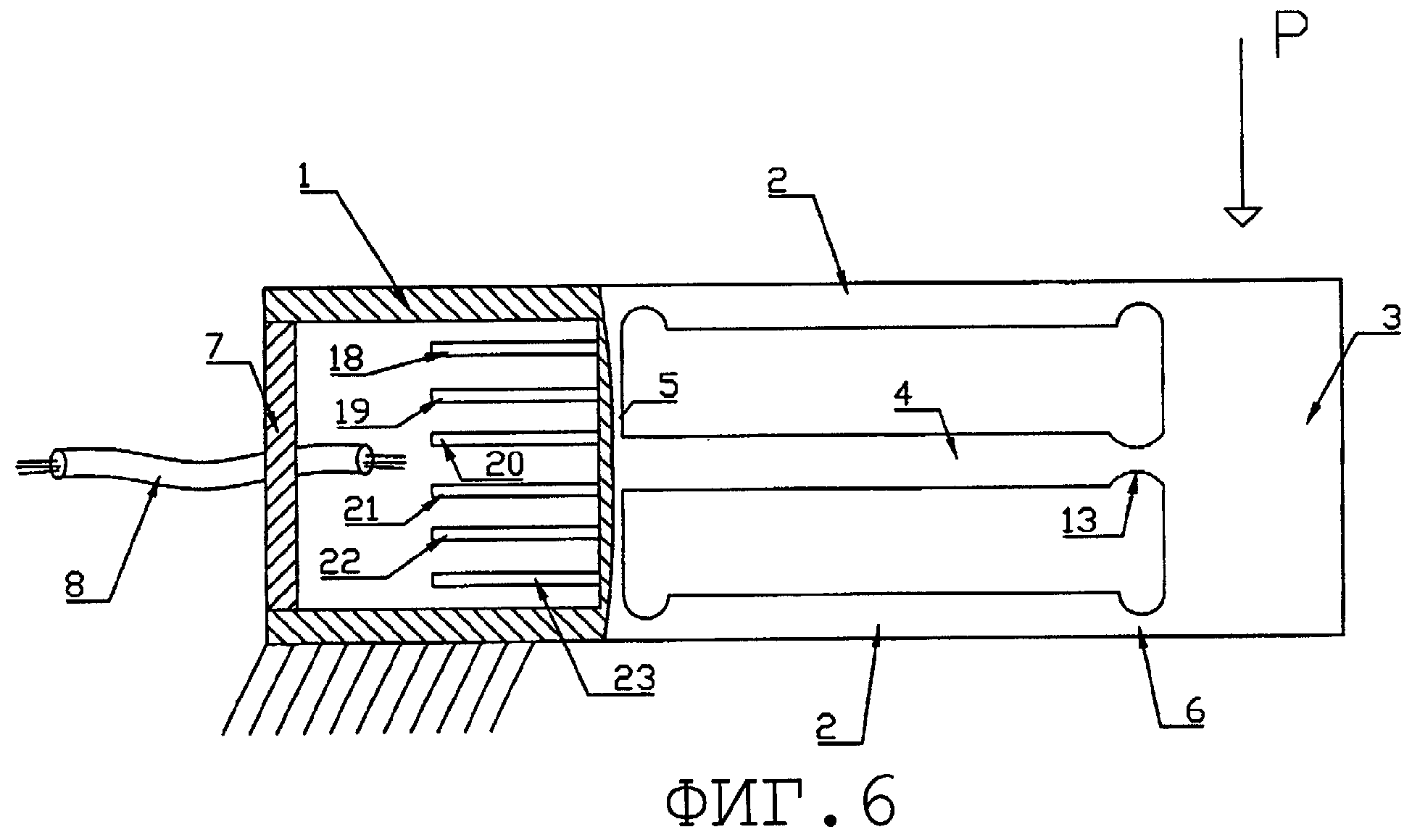
на фиг.6 показан вариант выполнения настоящего изобретения, в котором для измерения смещений, обусловленных деформацией гибкой стенки, использованы емкостные или индуктивные чувствительные средства третьего типа,
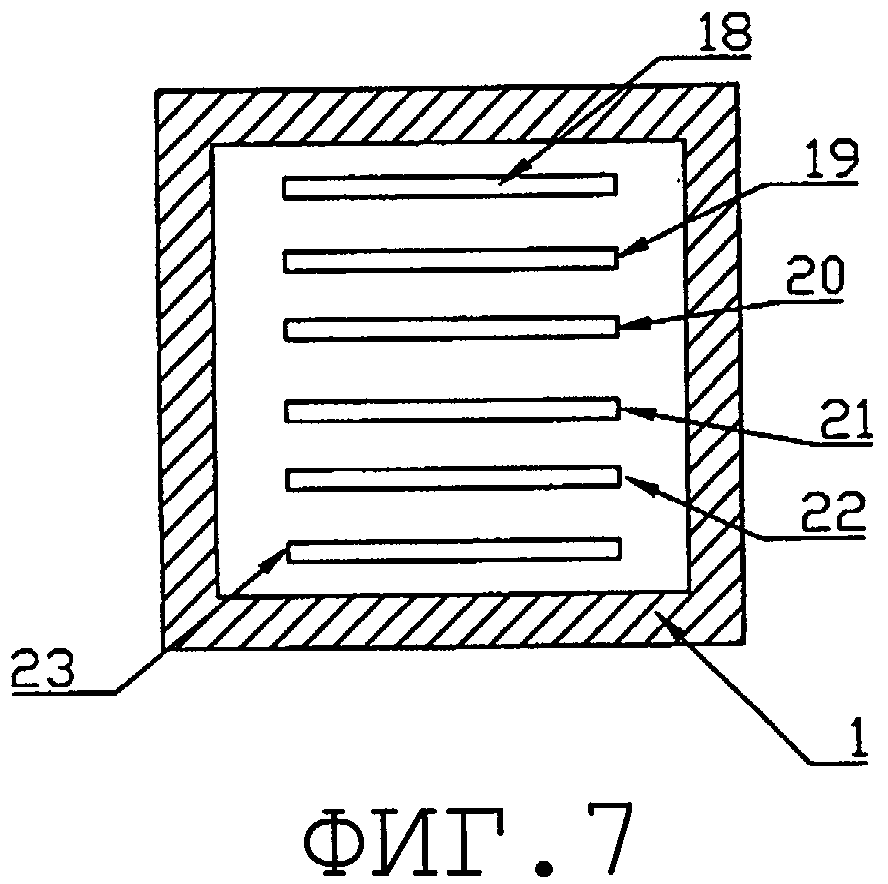
на фиг.7 показан вид системы датчиков, представленной на фиг.6, в направлении, перпендикулярном гибкой стенке,
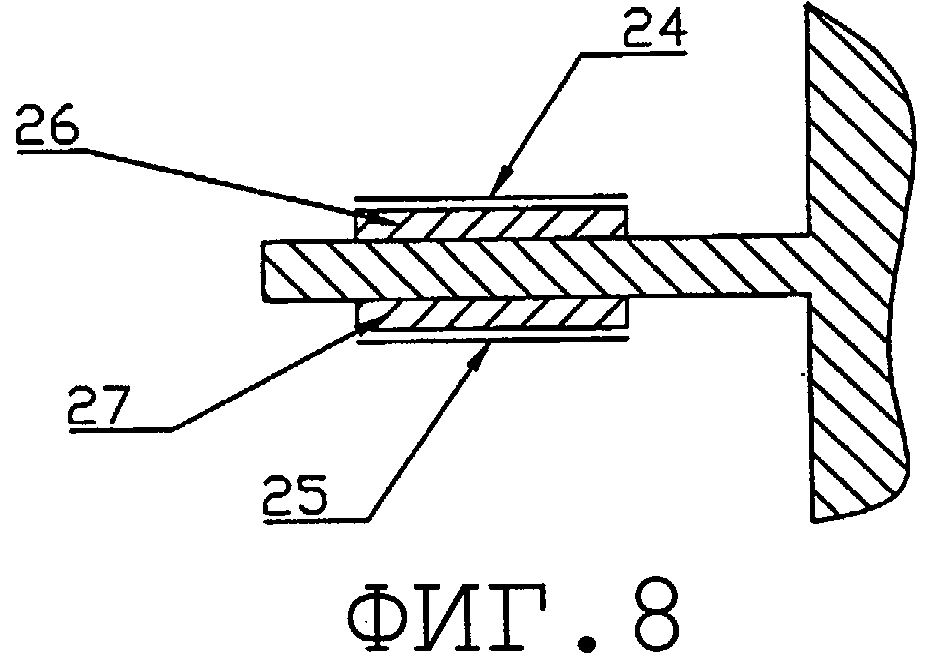
на фиг.8 показан пример размещения емкостных электродов на ребрах, которые установлены на гибкой стенке,
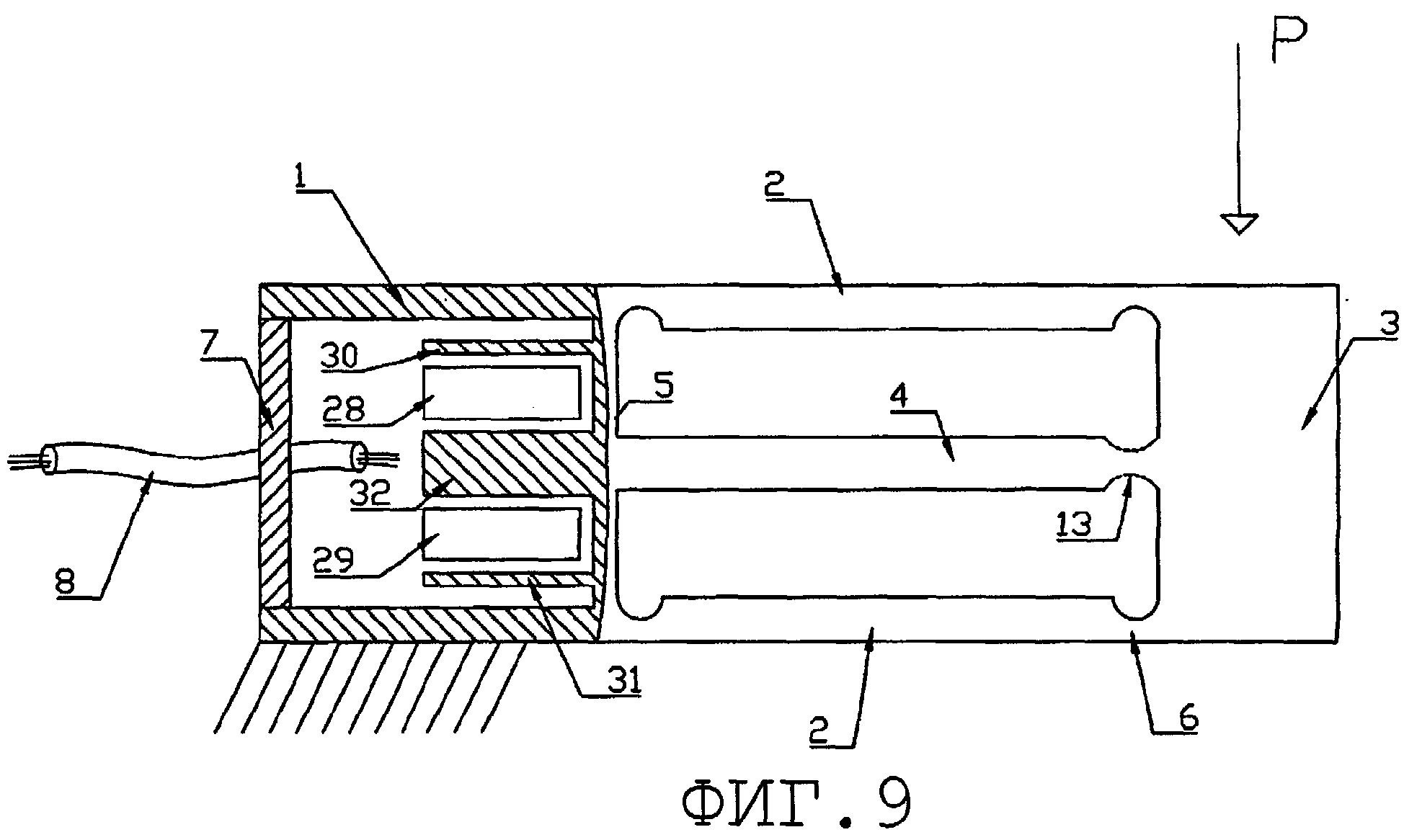
на фиг.9 в качестве примера показаны емкостные электроды, помещенные между ребрами, которые установлены на гибкой стенке,
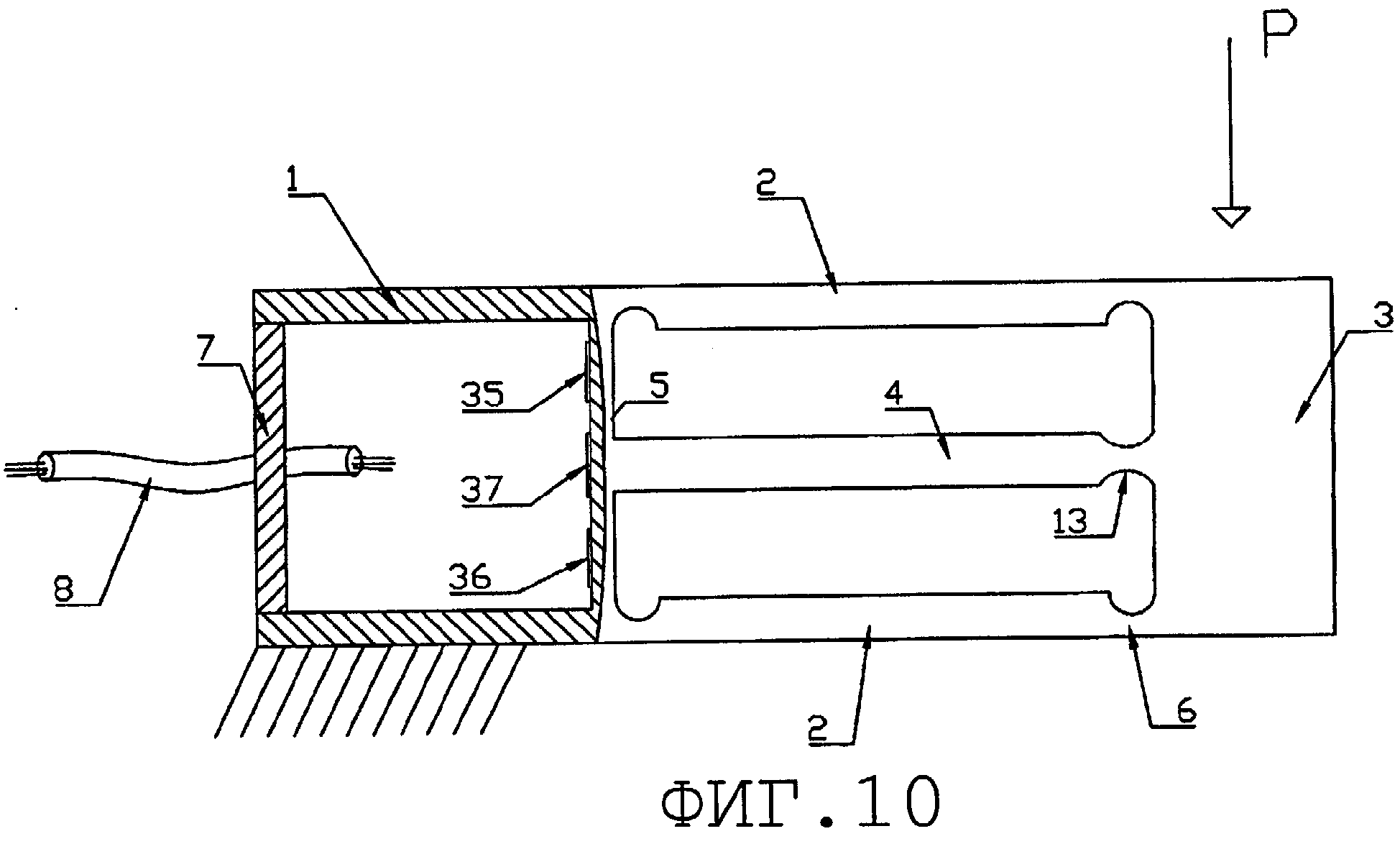
на фиг.10 показан вариант выполнения настоящего изобретения с датчиками напряжения для измерения деформации гибкой стенки,
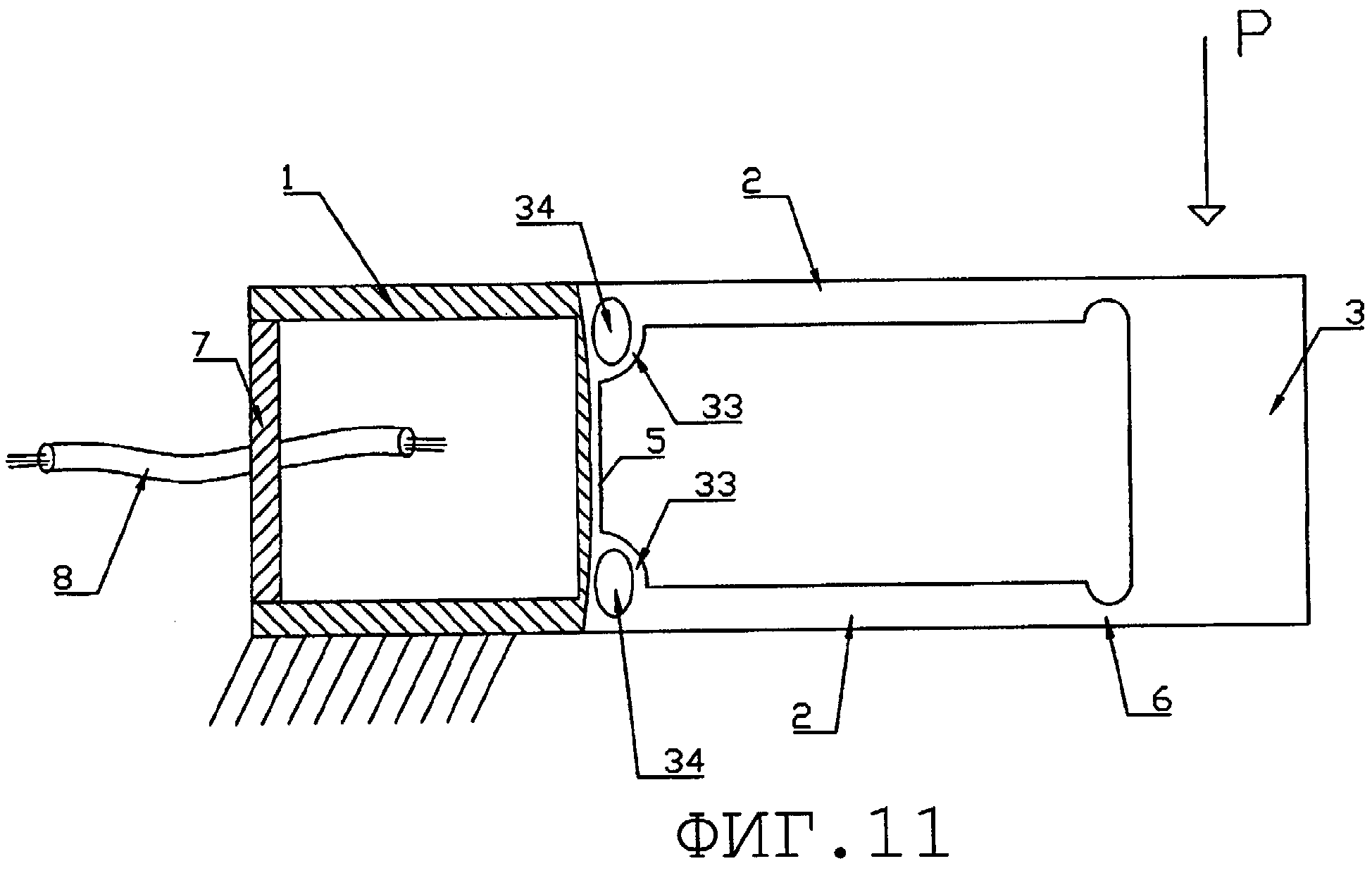
на фиг.11 показан вариант выполнения настоящего изобретения с балками, соединяющими базовый конец и воспринимающую часть для восприятия нагрузки или силы и функционирующими как рычаг, действующий на гибкую стенку,
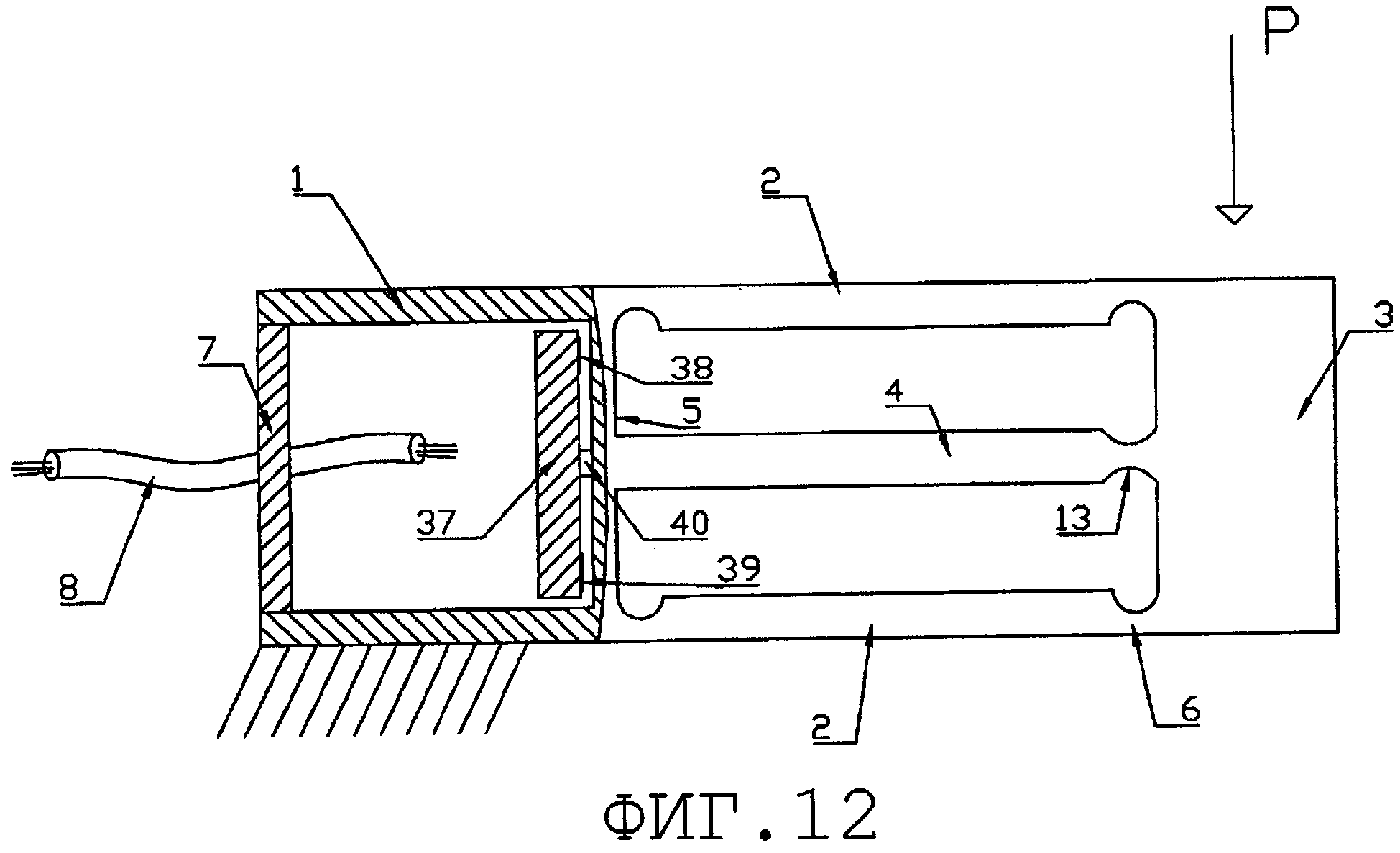
на фиг.12 показан вариант выполнения настоящего изобретения, в котором для измерения деформации гибкой стенки использованы емкостные или индуктивные чувствительные средства другого типа,
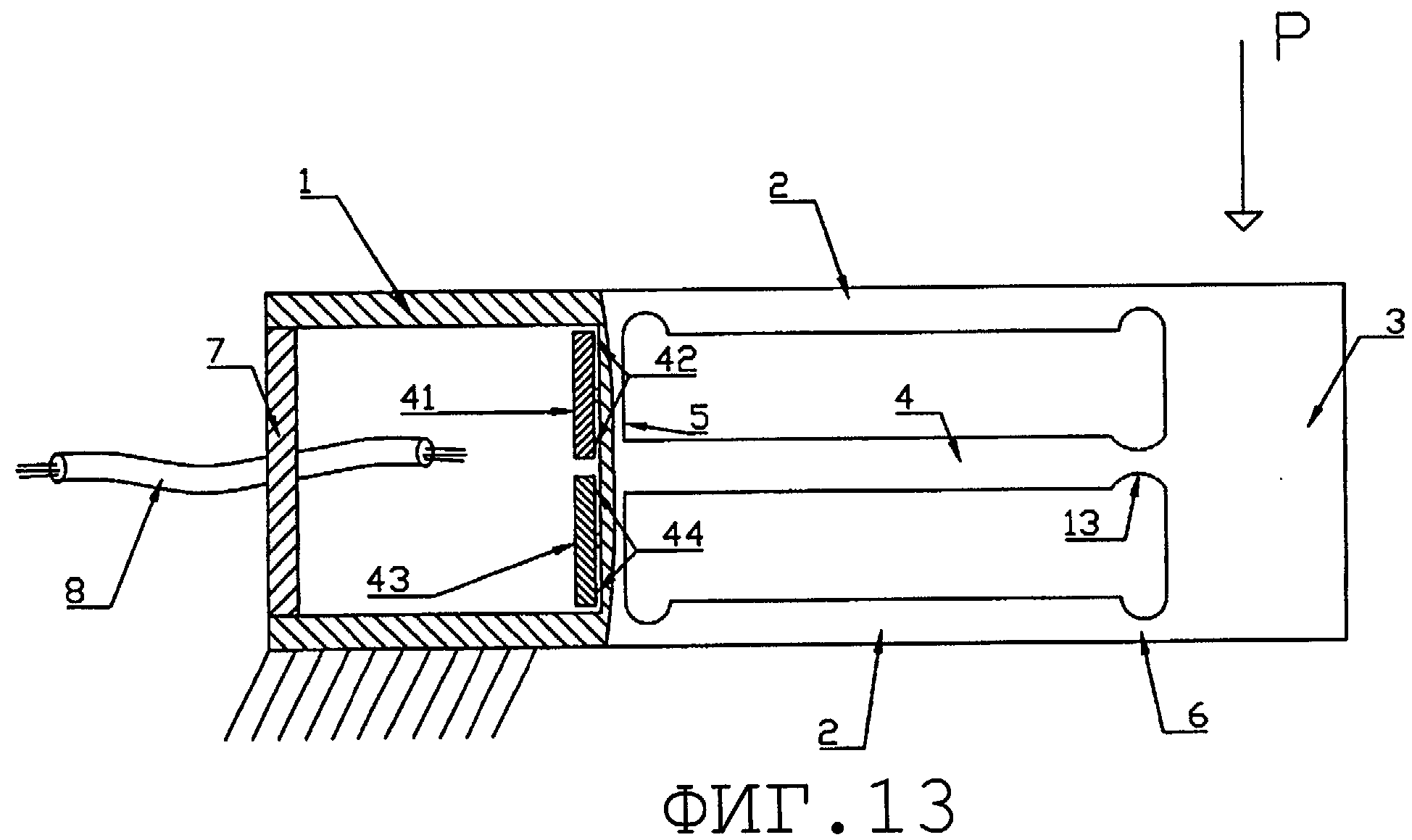
на фиг.13 показан вариант выполнения настоящего изобретения, в котором для измерения деформации гибкой стенки использованы емкостные или индуктивные чувствительные средства еще одного типа,
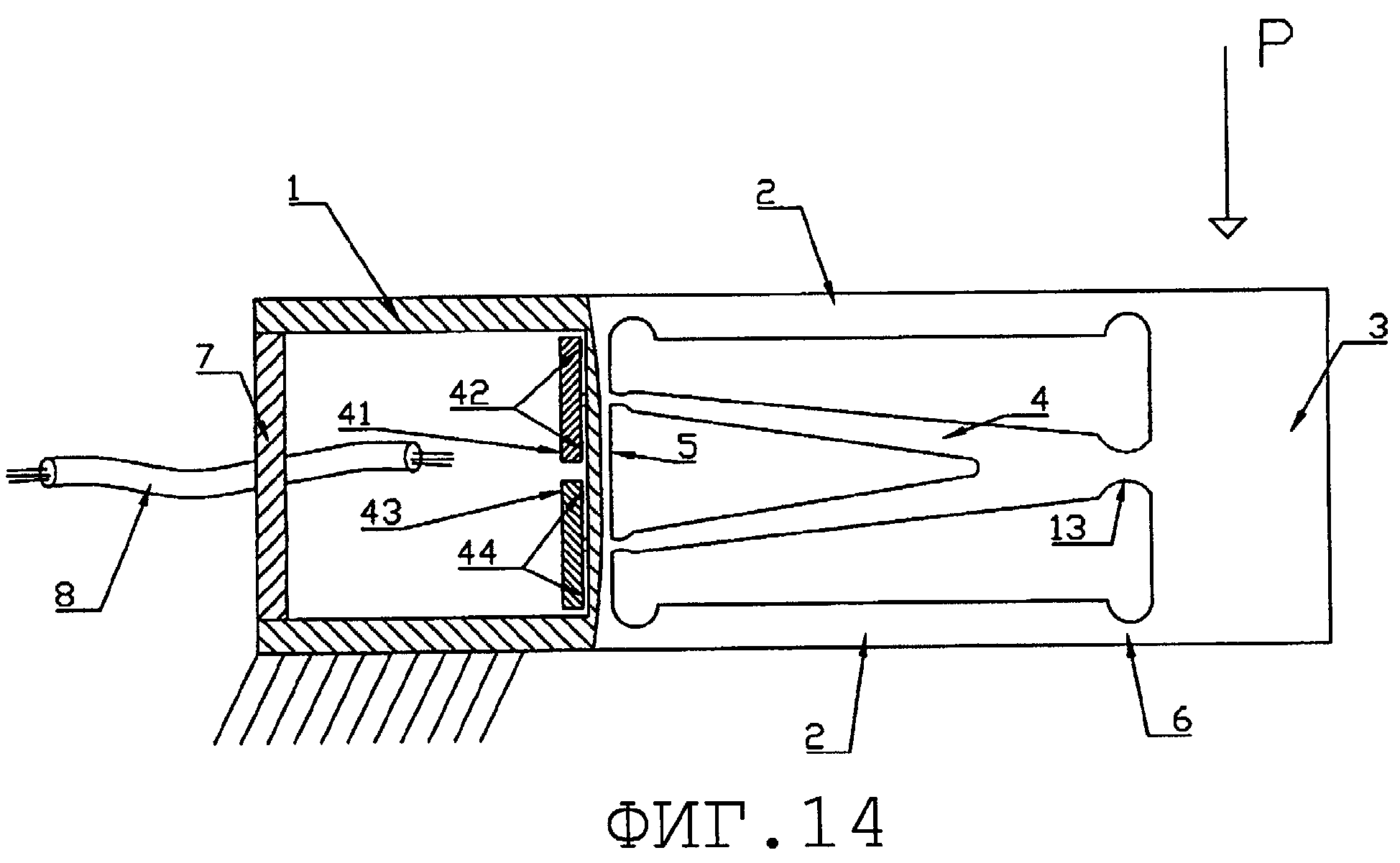
на фиг.14 показано, как в разновидности варианта выполнения настоящего изобретения, представленного на фиг.13, два рычага действуют на гибкую стенку,
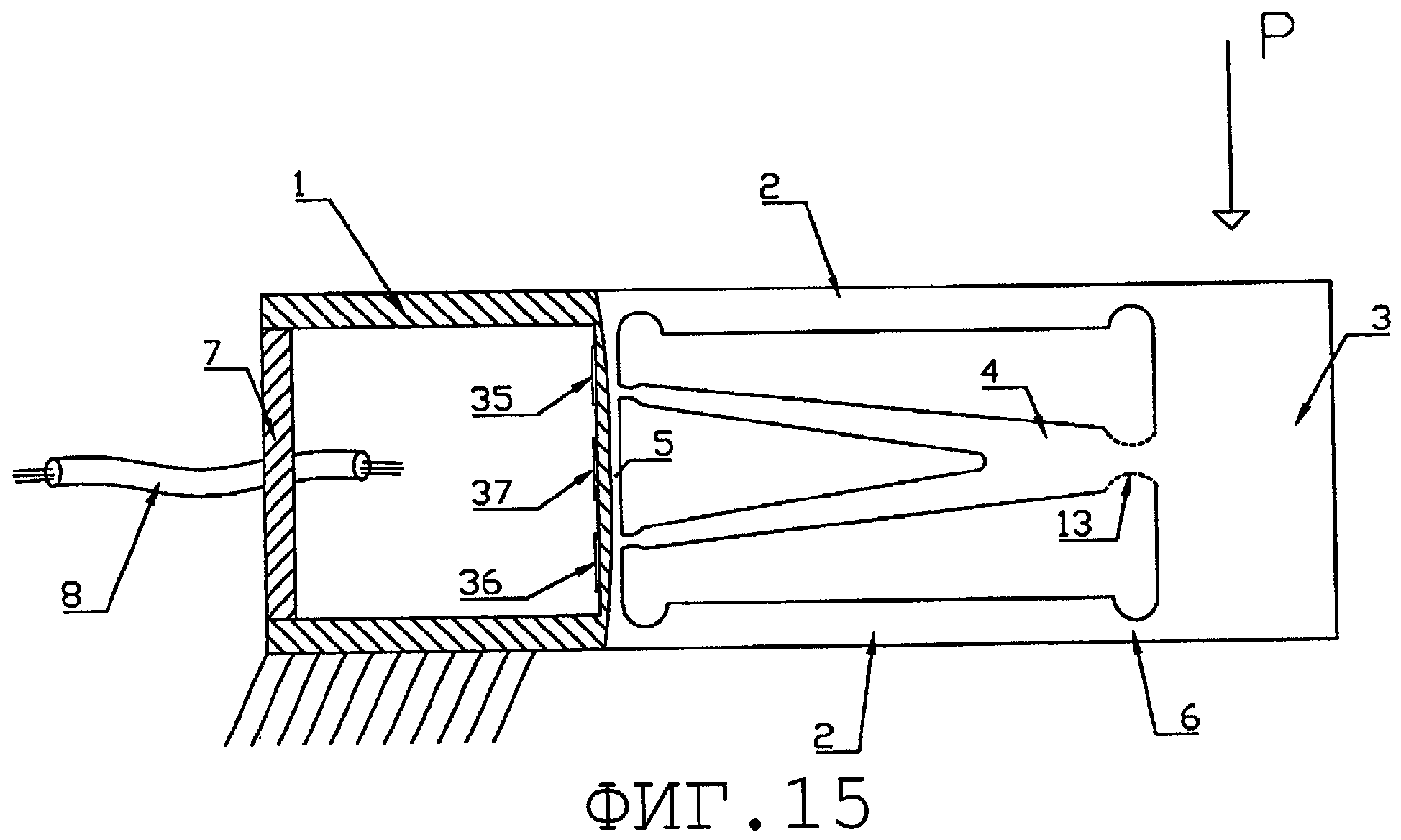
на фиг.15 показано, как в разновидности варианта выполнения настоящего изобретения, представленного на фиг.10, два рычага действуют на гибкую стенку,
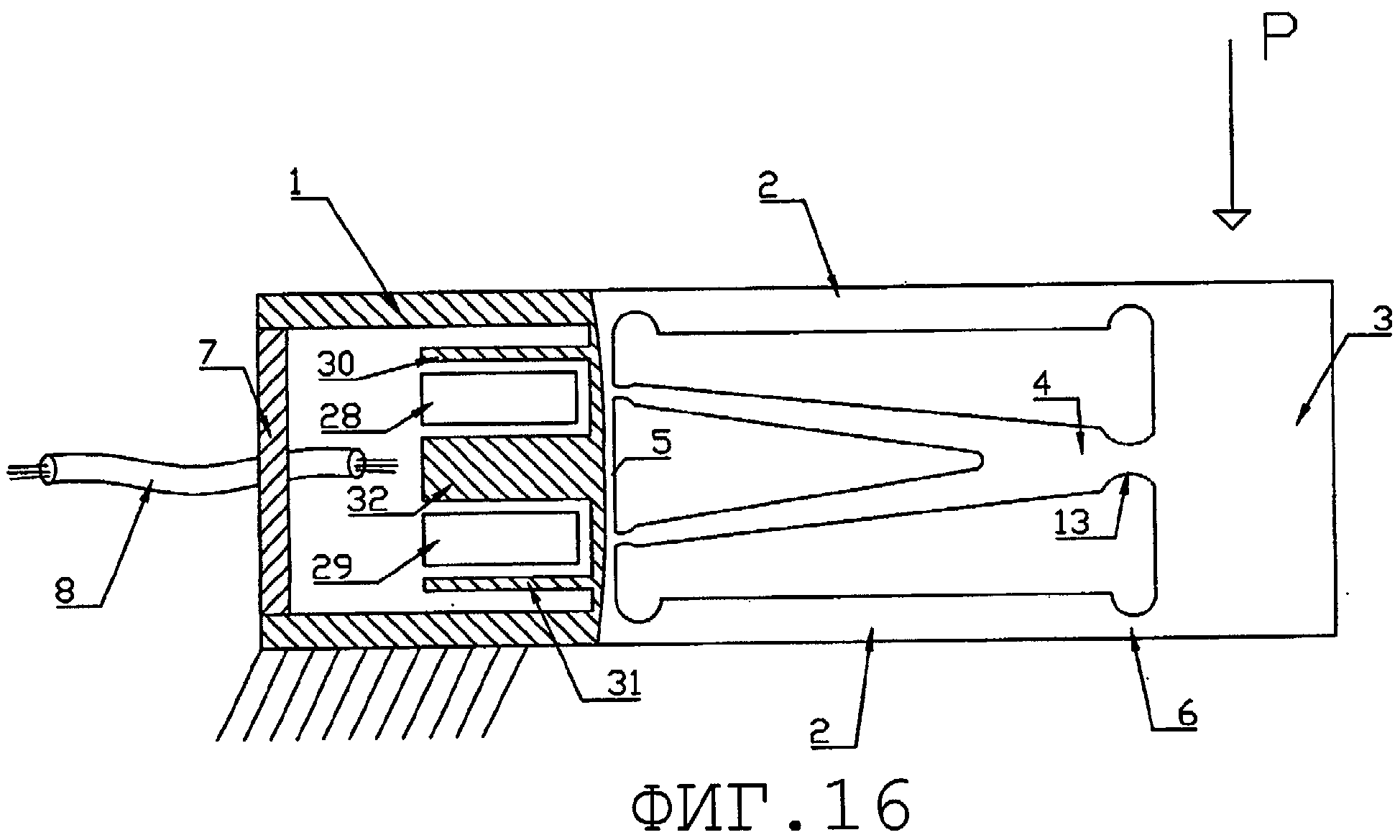
на фиг.16 показано, как в разновидности варианта выполнения настоящего изобретения, представленного на фиг.9, два рычага действуют на гибкую стенку,
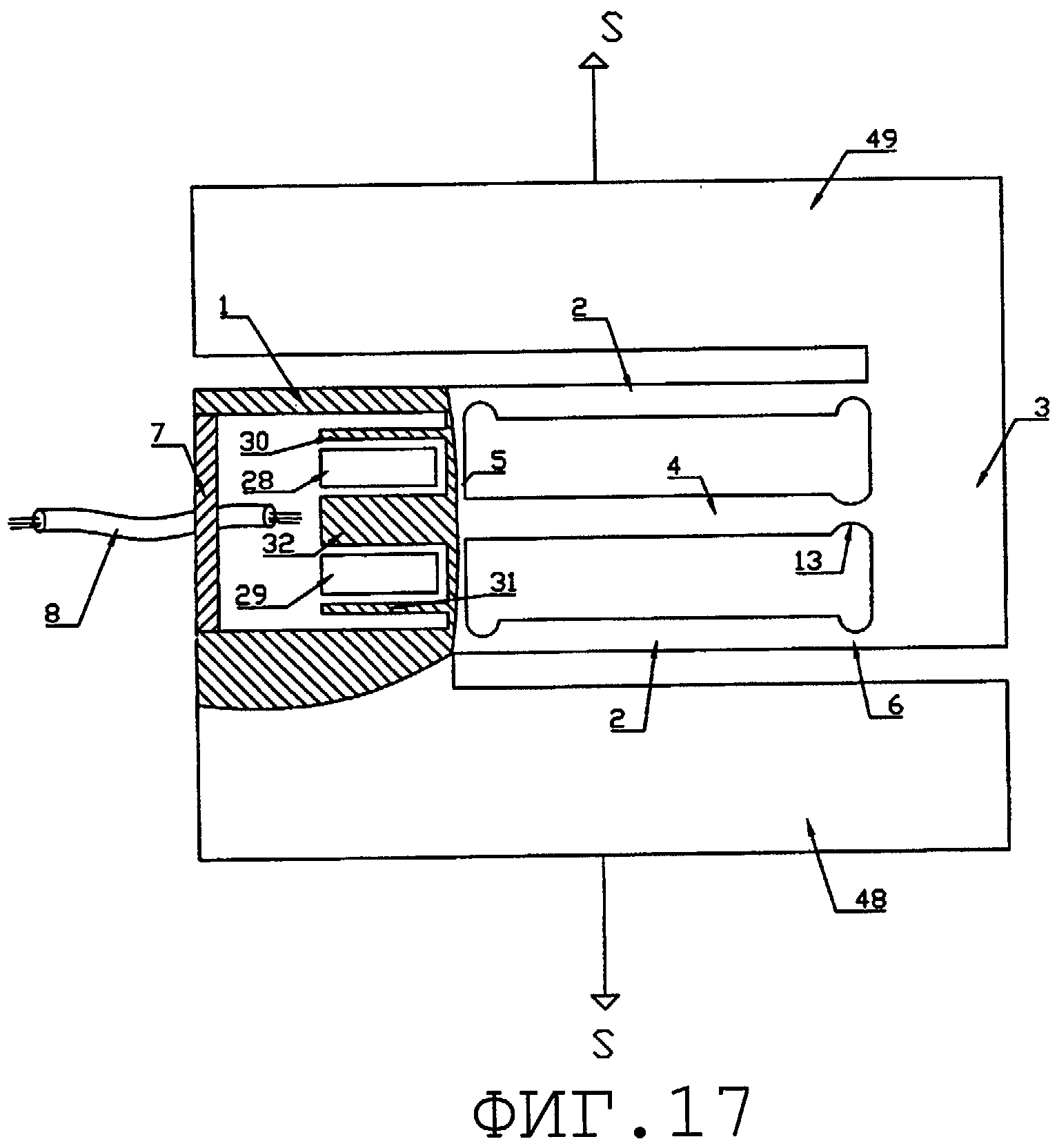
на фиг.17 показан вариант выполнения настоящего изобретения, в котором динамометрический элемент приспособлен для измерения сил натяжения и подвешенных грузов,
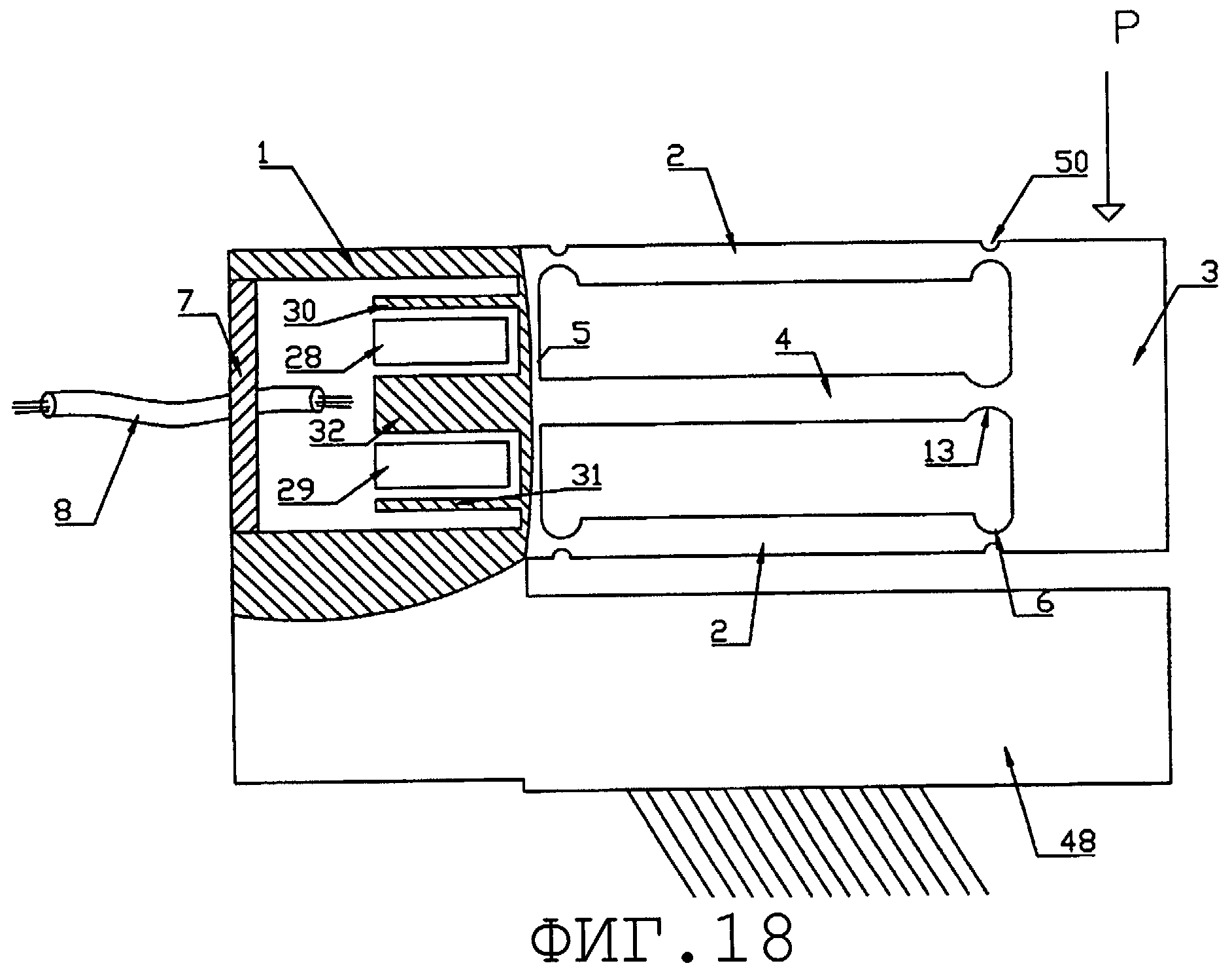
на фиг.18 показан вариант выполнения настоящего изобретения, в котором динамометрический элемент приспособлен для измерения с высокой точностью даже при его установке на шероховатых поверхностях,
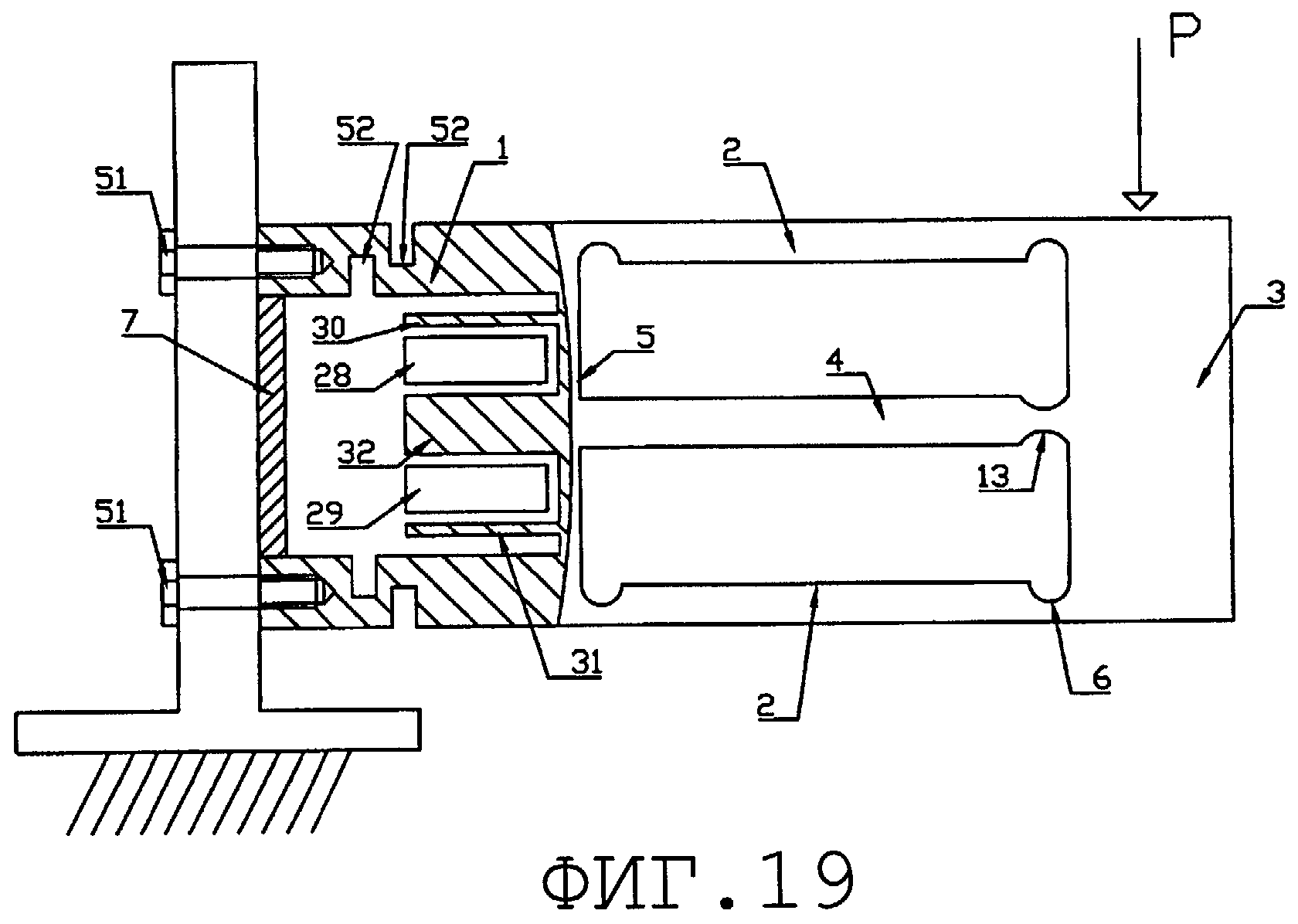
на фиг.19 показан вариант выполнения настоящего изобретения, в котором динамометрический элемент приспособлен для установки на вертикальных поверхностях,
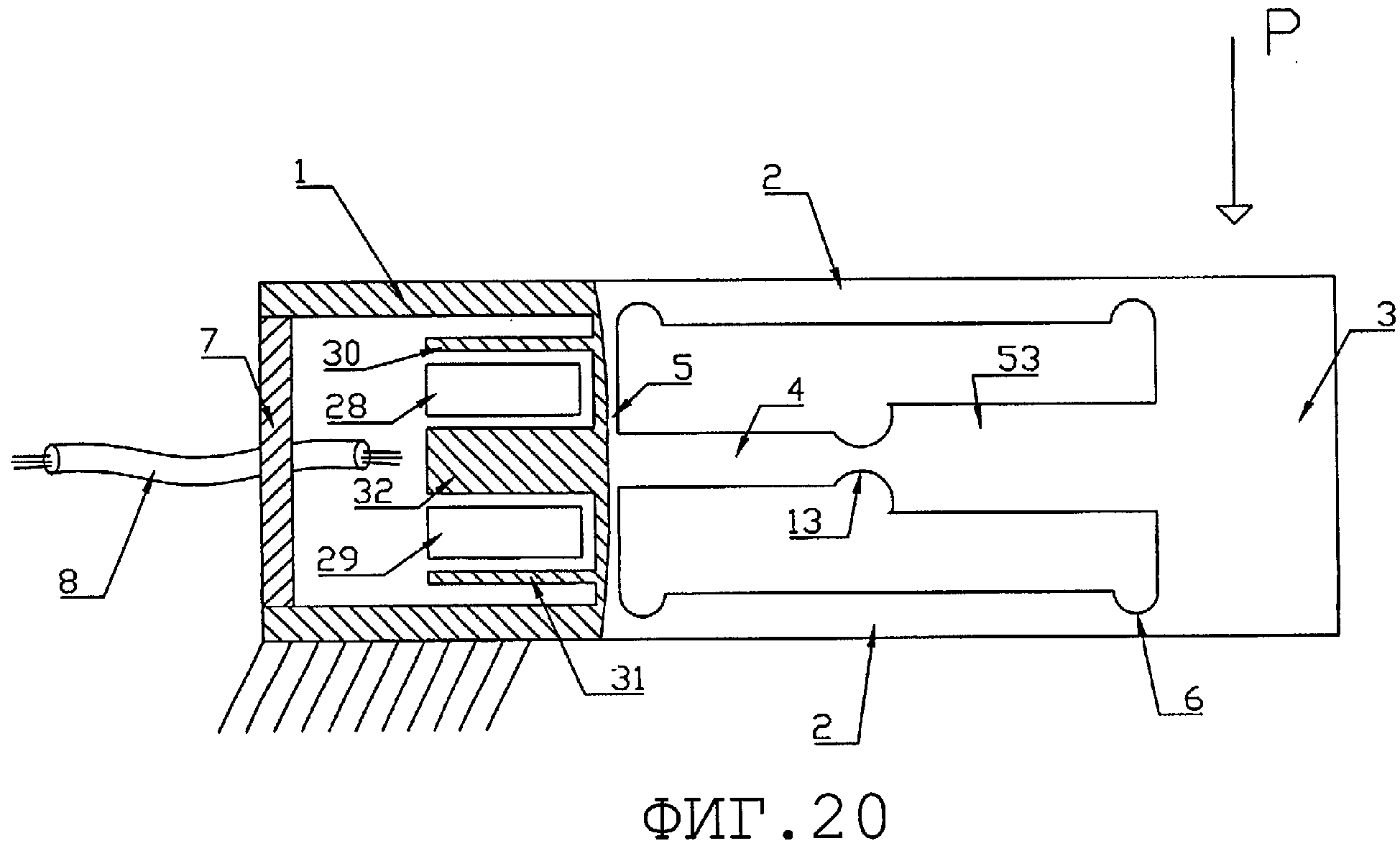
на фиг.20 показан вариант выполнения настоящего изобретения, в котором динамометрический элемент можно оптимизировать путем изменения действительной длины рычага,
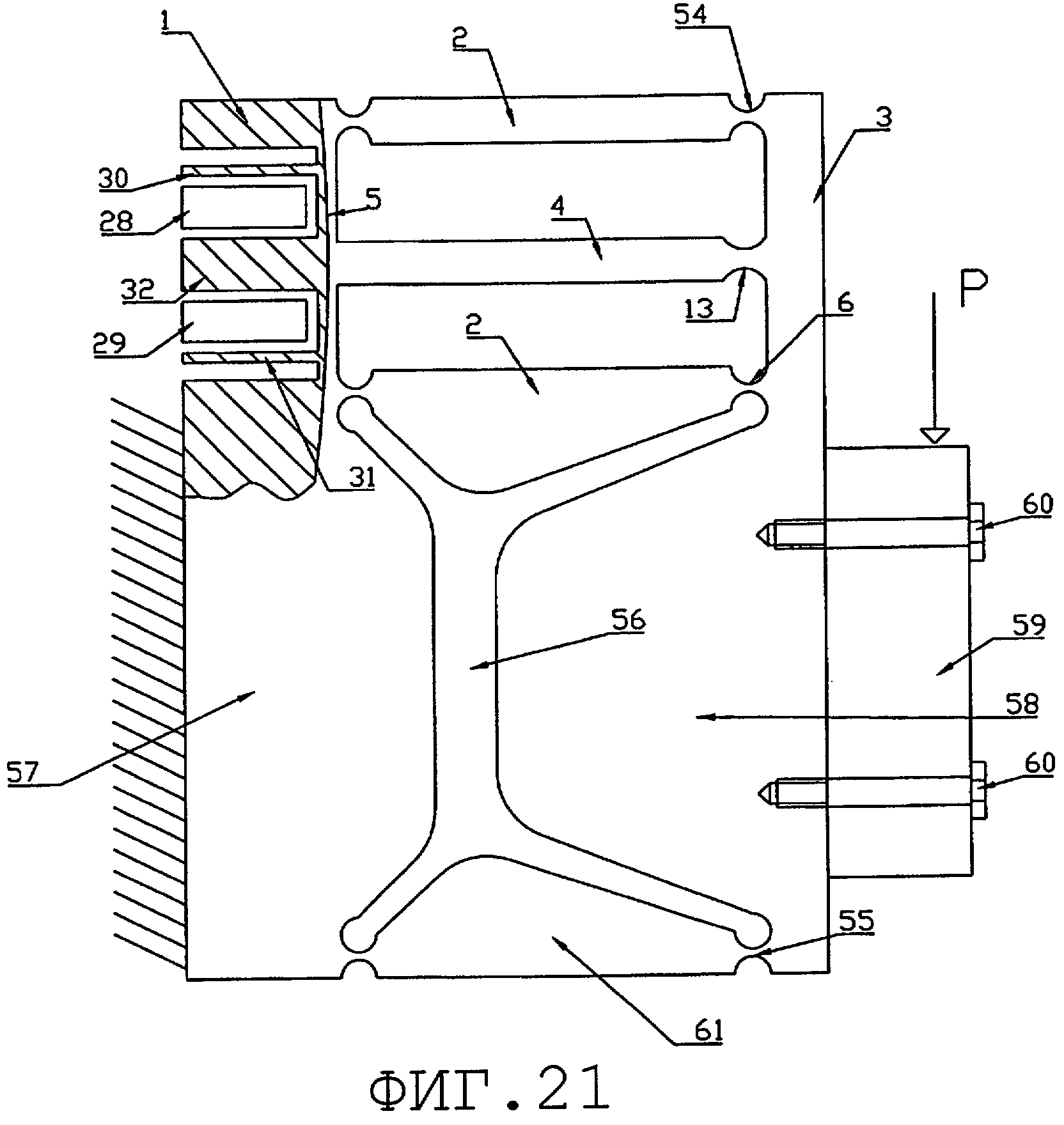
на фиг.21 показан вариант выполнения настоящего изобретения, в котором динамометрический элемент приспособлен для установки при высоких нагрузках,
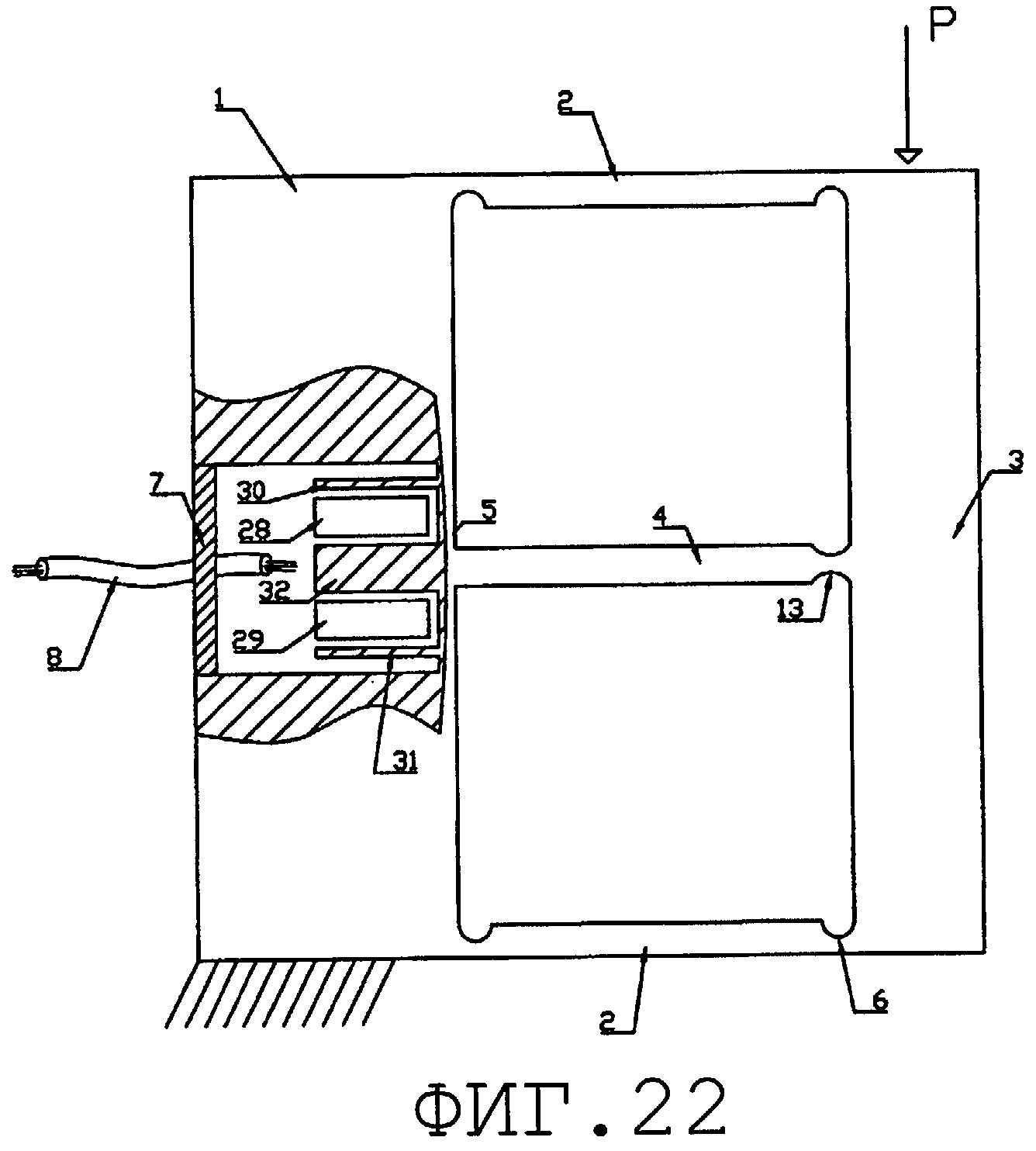
на фиг.22 показан вариант выполнения настоящего изобретения, в котором динамометрический элемент приспособлен для измерения эксцентрических нагрузок, приложенных с высокой степенью эксцентричности,
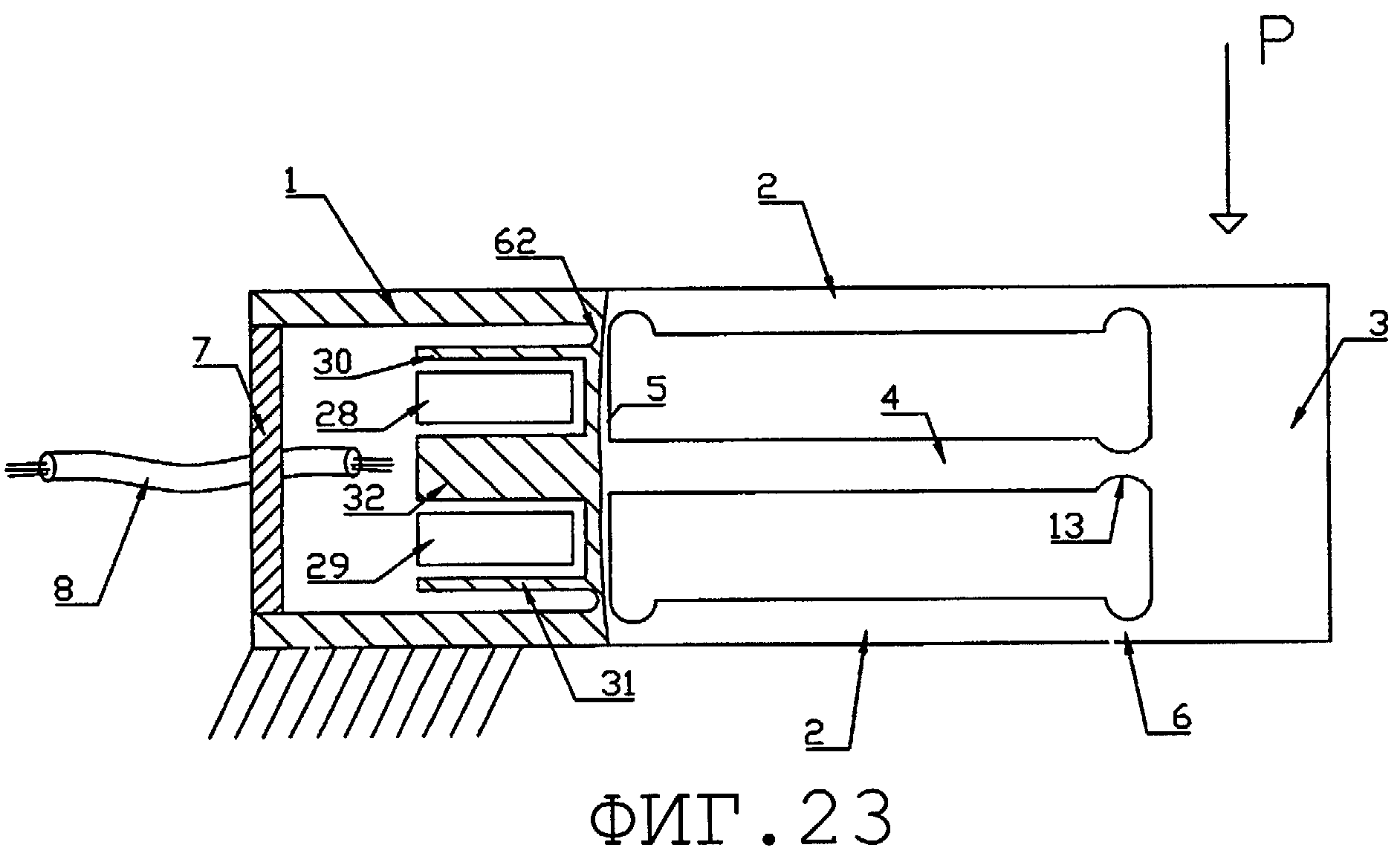
на фиг.23 показан вариант выполнения настоящего изобретения, в котором гибкая стенка динамометрического элемента уменьшена по окружности для отделения области деформации гибкой стенки от стенки чувствительной камеры,
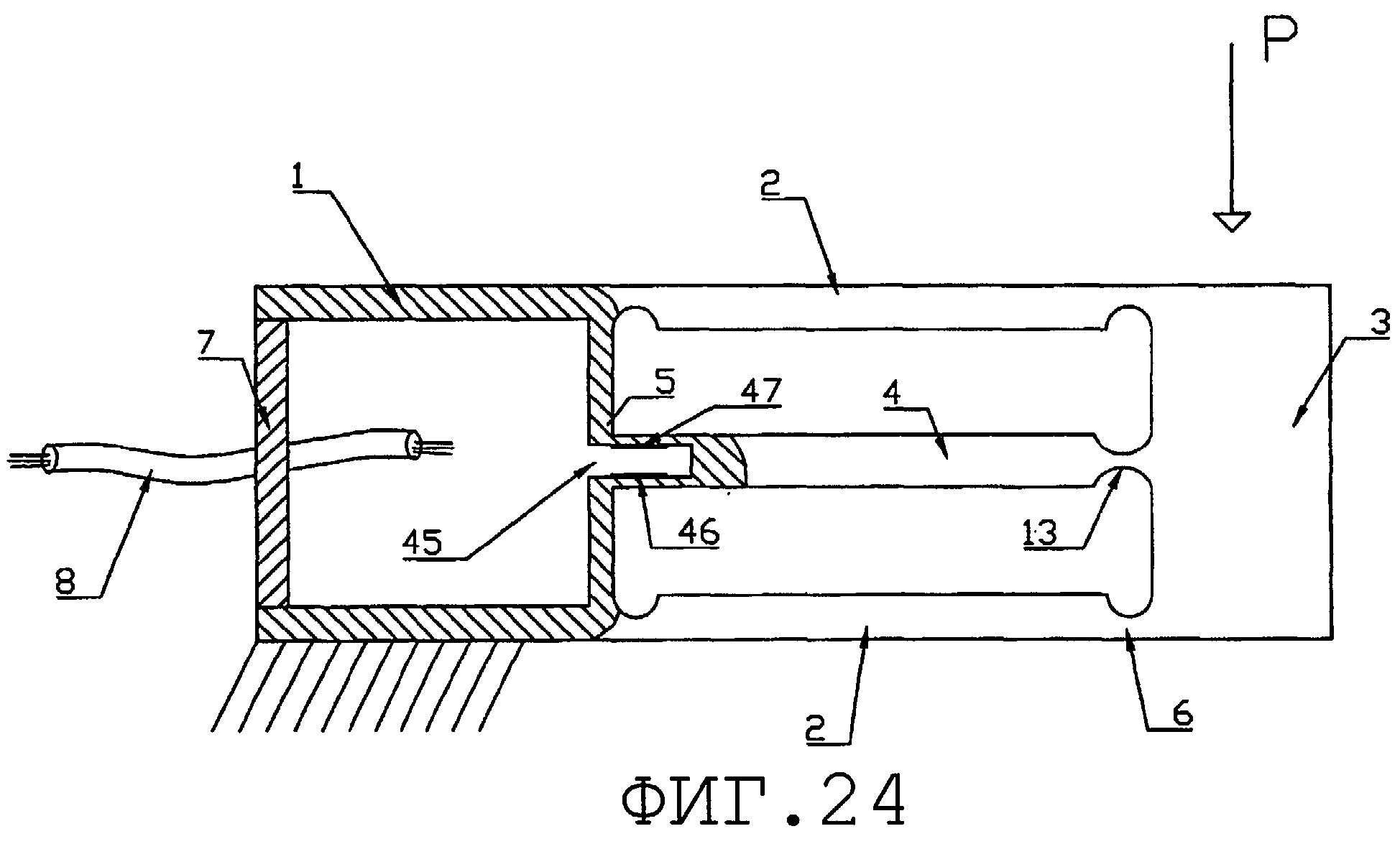
на фиг.24 показан вариант выполнения настоящего изобретения, в котором рычаг выполнен как продолжение гибкой стенки, так что гибкая стенка составляет часть рычага, действующего на гибкую стенку.
Известный динамометрический элемент, который показан на фиг.1, закреплен на левом конце, а измеряемая сила или нагрузка Р приложена к его правому концу. Это обычный динамометрический элемент, используемый большинством изготовителей динамометрических элементов с балками и тензодатчиками. Упругое тело, которое обычно изготовлено из высокопрочного алюминия, содержит сплошной базовый конец 1, две балки 2 и сплошную воспринимающую часть 3 для приема нагрузки.
Указанное упругое тело действует как известный механизм Робервала. При приложении нагрузки Р оно блокирует угловые перемещения части 3 и, таким образом, сводит все возможные перемещения части 3 к параллельным перемещениям даже в тех случаях, когда нагрузка или сила Р приложена в значительной степени эксцентрически. Эта свойство, которое делает динамометрический элемент нечувствительным к месту приложения нагрузки, является предпосылкой точных измерений с использованием динамометрических элементов. Часто между двумя балками 2 бывает размещена третья балка 4. В таких динамометрических элементах деформации подвергаются только эти две балки 2 и третья балка 4 и, главным образом, в местах S1-S8, в то время как базовый конец 1 и воспринимающая часть 3 являются сплошными и, таким образом, не деформируются. Поэтому обычно тензодатчики располагают по меньшей мере в одном месте S1-S8, предпочтительно в местах S3-S6, поскольку третья балка 4 благодаря действию балок 2 при деформации приобретает явно выраженную S-образную форму.
Ниже изобретение описано подробно с ссылкой на фиг.2, на которой показано базовое изобретение, в котором упругое тело содержит базовый конец 1, две балки 2, воспринимающую часть 3 для приема нагрузки, а кроме того, чувствительную камеру, предназначенную для установки чувствительных средств и включающую гибкую стенку 5. В предпочтительном варианте чувствительная камера расположена на базовом конце 1, как показано на фиг.2.
Третья балка 4, которая в настоящем изобретении действует как рычаг 4, помимо этого соединяет гибкую стенку 5 с воспринимающей частью 3 динамометрического элемента.
Балки 2, которые являются жесткими в средней части, но имеют гибкие концы 6, связывают вместе базовый конец 1 и воспринимающую часть 3, в результате чего часть 3 может совершать лишь параллельные смещения, даже когда сила Р приложена в значительной степени эксцентрически. Эта конструкция, которая делает динамометрический элемент нечувствительным к точке приложения нагрузки, является предпосылкой точных измерений с использованием динамометрических элементов.
Крышка 7, в которой может быть установлен кабель 8 для подачи питания и пересылки сигналов к датчику и от датчика, закрывает чувствительную камеру с гибкой стенкой 5.
На фиг.3 проиллюстрированы смещение D части 3 для приема нагрузки, угловое перемещение балок 2 и рычага 4 и деформация гибкой стенки 5 при приложении нагрузки Р. Для наглядности все смещения и деформации преувеличены. Для точности динамометрического элемента согласно настоящему изобретению важно, чтобы упругость и жесткость динамометрического элемента определялись в наибольшей степени размерами гибкой стенки, а также очень важно, чтобы жесткость гибких частей 6 балок 2 была пренебрежимо малой.
На фиг.4 показано базовое изобретение с емкостным датчиком, который установлен в чувствительной камере, включающей держатель 9 датчика, который может быть выполнен в виде керамического диска, и электроды 10 и 11, чувствительные к смещению, обращенные к гибкой стенке 5 и расположенные на некотором расстоянии от нее, предпочтительно в месте максимальной деформации. В середине держателя датчиков, где среднее смещение гибкой стенки минимально, изображен эталонный электрод 12, наличие которого не обязательно. Возможно также размещение этого электрода на внешней периферии держателя 9 датчиков, где смещение по существу равно нулю. Емкостные электроды могут быть соединены с цепью измерителя емкости, установленной на тыльной стороне держателя 9 датчиков. Эта цепь может быть, например, выполнена согласно патенту США №4737706.
Вместо емкостных электродов могут быть использованы индуктивные датчики в виде небольших катушек, предпочтительно размещенные в тех же самых местах на держателе 9 датчиков, что и емкостные электроды. На тыльной стороне держателя 9 датчиков может быть размещена цепь, реагирующая на изменение индуктивности катушек или на вихревые токи при перемещении гибкой стенки в результате действия измеряемой силы.
Во всех вариантах выполнения настоящего изобретения рычаг 4 предпочтительно имеет более тонкое поперечное сечение 13 на том конце, которым рычаг закреплен в части 3 упругого тела, в результате чего при том же смещении части 3 деформации гибкой стенки 5 увеличиваются.
На фиг.5 показано базовое изобретение с другим емкостным датчиком, включающим держатель 14 датчиков с емкостными электродами 15 и 16, установленный на стержне 17, который может быть продолжением рычага 4. Легко видеть, что благодаря рычагу 4 смещение воспринимающей части 3 преобразуется в деформацию гибкой стенки 5, которая, в свою очередь, благодаря стержню 17 преобразуется в изменение расстояния от емкостных электродов 15 и 16 до внутренних стенок чувствительной камеры.
Кроме того, в этом варианте выполнения настоящего изобретения емкостные электроды могут быть заменены индуктивными датчиками.
Во всех вариантах выполнения настоящего изобретения чувствительная камера может иметь круглое, прямоугольное или любое другое поперечное сечение, а держатель 9 датчиков, представленный на фиг.4, и держатель 14 датчиков, представленный на фиг.5, может предпочтительно иметь форму, соответствующую поперечному сечению чувствительной камеры с целью достижения максимального изменения емкости при определенной деформации гибкой стенки 5.
Если, например, поперечное сечение чувствительной камеры на фиг.5 является прямоугольным, держатель 14 датчиков предпочтительно также выполнен прямоугольным, при этом электроды 15 и 16 расположены на верхней и нижней горизонтальных поверхностях держателя 14.
Согласно настоящему изобретению емкостные электроды могут быть расположены на внутренней стенке полости, причем соответствующие заземленные электроды расположены на держателе 9 или 14.
В предпочтительном варианте выполнения настоящего изобретения в еще одной системе с емкостными датчиками, изображенной на фиг.6, из гибкой стенки выступают ребра 18, 19, 20, 21, 22 и 23, предпочтительно перпендикулярно к ней.
Как показано на фиг.3, когда гибкая стенка под действием рычага 4 испытывает деформацию, расстояние от концов ребер до емкостных электродов, расположенных либо на концах ребер, либо между ребрами, увеличивается или уменьшается, что обеспечивает создание очень чувствительной системы с емкостными датчиками.
Ребра предпочтительно выполнены из того же материала, что и упругое тело, путем механической обработки полости, однако во избежание механической обработки сравнительно длинных ребер они могут быть выполнены по отдельности и установлены на коротких ножках, полученных путем механической обработки гибкой стенки, или непосредственно на гибкой стенке. Чтобы ребра могли отклоняться, необходимо, как показано на фиг.7, чтобы ширина ребер была меньше, чем ширина гибкой стенки, настолько, чтобы гибкая стенка могла изгибаться в области между внутренней стороной чувствительной камеры и краями ребер.
Аналогично рычаг 4 предпочтительно, но не обязательно, имеет по существу ту же ширину, что и ребра.
На фиг.8 показано ребро с емкостными электродами 24 и 25, установленными на изолирующих слоях 26 и 27. Если, например, на ребрах 19 и 22 имеются емкостные электроды, как показано на фиг.8, а ребра 18, 20, 21 и 23 заземлены, деформация гибкой стенки 5, как показано на фиг.3, увеличивает обе емкости электродов на ребре 19 одновременно с уменьшением емкостей электродов на ребре 22. Согласно настоящему изобретению количество ребер может быть увеличено или уменьшено и, например, ребра 20 и 21 могут быть объединены в одно. Аналогично емкостные электроды могут также быть установлены на одной или на обеих сторонах любого количества ребер.
Например, если ребра 18 и 23 снабжены электродами, как показано на фиг.8, емкость одного электрода на каждом ребре увеличивается, в то время как емкость другого уменьшается, поскольку внутренние стенки вместе с ребрами 19 и 22 работают как противоэлектроды.
Аналогично ребра 20 и 21 могут быть снабжены электродами, как показано на фиг.8, а заземленное ребро может быть помещено между ребрами 20 и 21.
Кроме того, в этом варианте выполнения настоящего изобретения емкостные электроды могут быть заменены индуктивными датчиками.
В предпочтительном варианте выполнения настоящего изобретения, показанном на фиг.9, отдельные измерительные электроды 28 и 29 помещены между ребрами и, предпочтительно, но не обязательно, установлены в фиксированном положении относительно гибкой стенки 5 или внутренней стенки чувствительной камеры. Ребра 30 и 31 целесообразно размещать на гибкой стенке 5 в таких местах, где она подвергается достаточной деформации. В этом случае, когда при приложении нагрузки или силы Р расстояние от ребра 32, которое может быть продолжением рычага 4, до электрода 28 уменьшается, расстояние от соответствующим образом размещенного ребра 30 до электрода 28 при деформации стенки также уменьшается.
Аналогично расстояние от электрода 29 до ребер 32 и 31 увеличивается.
Кроме того, в этом варианте выполнения настоящего изобретения емкостные электроды могут быть заменены индуктивными датчиками.
Преимуществом всех вариантов выполнения настоящего изобретения, в которых внутренняя стенка полости не используется в качестве противоэлектрода, а вместо нее используются другие электроды, например, установленные на ребрах или установленные отдельно, является то, что деформация стенок чувствительной камеры, окружающих гибкую стенку 5, например, вследствие напряжений, возникших при установке динамометрического элемента, не порождает измерительных ошибок.
На фиг.10 показано базовое изобретение с использованием датчиков напряжения, которые предпочтительно выполнены в виде тензодатчиков 35 и 36 и которые предпочтительно размещены в местах, где гибкая стенка 5 испытывает максимальные деформации. В том месте, где деформации минимальны, может быть дополнительно размещен эталонный тензодатчик 37.
По сравнению с известными динамометрическими элементами с тензодатчиками предлагаемый динамометрический элемент с тензодатчиками обладает очень важным преимуществом, которое заключается в том, что без каких-либо дополнительных производственных операций тензодатчики оказываются защищены от воздействия окружающей среды. Кроме того, электрические соединения упрощены, поскольку все тензодатчики расположены рядом друг с другом.
При малых затратах в производственных масштабах можно изготовить специальную систему тензодатчиков, причем все тензодатчики интегрированы в один блок.
Согласно настоящему изобретению напряжения в гибкой стенке можно измерять другими средствами измерения напряжения, например оптическими или индуктивными.
Согласно настоящему изобретению и как показано на фиг.11, функцию рычага 4 в вышеописанных вариантах выполнения настоящего изобретения может выполнять один рычаг 33 или оба рычага 33, которые могут быть выполнены как часть балок 2, соединяющих базовый конец 1 и воспринимающую часть 3. Для обеспечения возможности деформации гибкой стенки на базовом конце 1 выполнены отверстия или щели, которые предпочтительно могут быть размещены в тех же местах, где размещены отверстия 34, показанные на фиг.11.
Как показано в фиг.12, держатель 37 электродов с датчиками 38 и 39, обращенными к гибкой стенке 5, может быть также установлен на коротком стержне или ребре 40. Деформация гибкой стенки 5 под действием рычага 4 измеряется по изменению расстояния между датчиками или электродами 38 и 39 и гибкой стенкой 5.
Другая конфигурация согласно настоящему изобретению показана на фиг.13, на которой два держателя 41 и 43 датчиков или электродов установлены отдельно на стержнях или ребрах в подходящих местах на гибкой стенке 5, причем электроды 42 и 44 обращены к гибкой стенке. Расстояние от электродов, размещенных на одном держателе датчиков, до гибкой стенки будет возрастающим, а расстояние от электродов, размещенных на другом держателе датчиков, до гибкой стенки будет уменьшающимся. Если каждый держатель датчиков снабжен только одним электродом, закрывающим его поверхность, наклон держателя электродов на коротком стержне внесет лишь небольшую погрешность, поскольку уменьшение расстояния на одном конце держателя электродов в значительной степени компенсируется соответствующим увеличением расстояния на противоположном его конце.
Как показано на фиг.14, рычаг 4 динамометрического элемента, представленного на фиг.13, может предпочтительно быть разделен на два отдельных рычага, каждый из которых воздействует непосредственно на гибкую стенку, предпочтительно в тех двух местах, где на стержнях установлены держатели датчиков.
Аналогично, как показано на фиг.15, рычаг 4 динамометрического элемента, представленного на фиг.10, может предпочтительно быть разделен на два отдельных рычага, каждый из которых воздействует непосредственно на гибкую стенку, предпочтительно в тех двух местах, где в тензодатчиках вызывается максимальное напряжение.
Как показано на фиг.16, рычаг 4 динамометрического элемента, представленного на фиг.9, может предпочтительно быть разделен на два отдельных рычага, каждый из которых воздействует непосредственно на гибкую стенку, предпочтительно в тех двух местах, где имеет место максимальное отклонение ребер.
Как показано на фиг.17, в динамометрических элементах согласно настоящему изобретению базовый конец 1 и воспринимающая часть 3 предпочтительно удлинены соответственно частями 48 и 49, что обеспечивает создание хорошо известных S-образных динамометрических элементов, которые идеально подходят для измерения сил натяжения и подвешенных грузов. Динамометрический элемент на фиг.17 показан с системой датчиков, изображенной на фиг.9, но может быть выполнен с любой из систем датчиков согласно настоящему изобретению.
Кроме того, динамометрические элементы согласно настоящему изобретению, предназначенные для особо высокоточных измерений, могут, как показано на фиг.18, иметь базовый конец 1, удлиненный частью 48, что позволяет избежать ситуации, когда напряжения, созданные при установке динамометрического элемента, достигают системы датчиков. Для облегчения точной механической обработки гибких частей 6 балок 2 пазы 50 во внутренней части и внешней части балок выполняют одновременно. Динамометрический элемент на фиг.18 показан с системой датчиков, изображенной на фиг.9, но может быть выполнен с любой из систем датчиков согласно настоящему изобретению.
На фиг.19 динамометрический элемент согласно настоящему изобретению показан со средствами его установки на вертикальной поверхности. Чтобы установочные напряжения от болтов 51 не достигли системы датчиков, на внутренней и внешних поверхностях чувствительной камеры можно выполнить фрезерованием пазы 52. Динамометрический элемент на фиг.19 показан с системой датчиков, изображенной на фиг.9, но может быть выполнен с любой из систем датчиков согласно настоящему изобретению.
На фиг.20 показан динамометрический элемент согласно настоящему изобретению, причем гибкая часть 13 рычага 4 перемещена из части для приема нагрузки ближе к базовому концу 1 благодаря удлинителю 53. Для максимально высокой точности измерений балки 2 должны иметь наименьшую возможную жесткость. Это может быть достигнуто путем изготовления гибкой части 6 очень малой толщины, что не очень хорошо из-за снижения прочности детали, или путем удлинения балок 2. Если балки 2 сделаны более длинными, рычаг 4 также становится более длинным, что уменьшает отклонение гибкой стенки при определенном смещении части 3 для приема нагрузки. Поскольку при высокоскоростных измерениях отклонение части 3 должно оставаться малым, оптимум может быть достигнут путем подбора длины рычага 4 относительно длины удлинителя 53, что в совокупности с размерами гибкой стенки 5 определяет предельные возможности динамометрического элемента. Динамометрический элемент на фиг.20 показан с системой датчиков, изображенной на фиг.9, но может быть выполнен с любой из систем датчиков согласно настоящему изобретению.
Динамометрический элемент согласно настоящему изобретению, изображенный на фиг.21, имеет массивные надставки 57 и 58, проходящие соответственно от базового конца 1 и воспринимающей части 3, что облегчает установку динамометрического элемента при высоких нагрузках. Тело динамометрического элемента на фиг.21 обычно изготавливают фрезеровкой балок 2, рычага 4, гибких частей 6, 13, 54 и 55 и системы датчиков в чувствительной камере. Жесткие надставки 57 и 58 могут быть с небольшими расходами выполнены плазменной резкой путем вырезания материала в месте 56. К динамометрическому элементу может быть присоединена болтами 60 внешняя воспринимающая часть 59 для приема нагрузки без внесения погрешностей, вызванных напряжениями от болтов благодаря сплошной конфигурации надставок 57. Аналогично динамометрический элемент может быть установлен на базовой конструкции без внесения погрешностей благодаря сплошной надставке 58. Динамометрический элемент на фиг.21 показан с системой датчиков, изображенной на фиг.9, но может быть выполнен с любой из систем датчиков согласно настоящему изобретению.
На фиг.22 показан динамометрический элемент согласно изобретению, в котором расстояние между балками 2 увеличено для уменьшения деформации в балках 2 в том случае, когда нагрузка Р приложена в значительной степени эксцентрически. Динамометрический элемент на фиг.22 показан с системой датчиков, изображенной на фиг.9, но может быть выполнен с любой из систем датчиков согласно настоящему изобретению.
Гибкая стенка в динамометрическом элементе согласно настоящему изобретению, изображенному на фиг.23, уменьшена по окружности для изоляции деформаций гибкой стенки от стенки чувствительной камеры. Это означает, что деформация гибкой стенки практически целиком определяется размерами самой гибкой стенки, а это является предпосылкой для точных измерений. Динамометрический элемент на фиг.23 показан с системой датчиков, изображенной на фиг.9, но может быть выполнен с любой из систем датчиков согласно настоящему изобретению.
На фиг.24 показан динамометрический элемент, в котором рычаг выполнен как продолжение гибкой стенки, и при этом сформирована полость 45, что дает возможность установки, например, тензодатчиков 46 и 47 в этой полости. Кроме того, в полости 45 или на поверхности гибкой стенки вокруг полости 45 могут быть установлены другие типы датчиков, помимо упомянутых выше.
Очень важным преимуществом всех вариантов выполнения настоящего изобретения является то, что герметизация чувствительной камеры выполнена на расстоянии от гибкой стенки, и поэтому она не влияет на измерения. Способ герметизации системы датчиков в известных динамометрических элементах включает использование металлического сильфона или металлических крышек, которые благодаря своей упругости влияют на измерения. Кроме того, они являются дорогостоящими и не подходят для работы в условиях производственной среды.
Из-за высокой чувствительности системы емкостных датчиков требования к материалу упругого тела по пределу текучести довольно низки, поэтому при использовании емкостных датчиков можно применять такие производственные процессы, как плазменная резка, спекания и отливка, которые не являются дорогостоящими при больших объемах производства. Здесь проиллюстрированы и описаны предпочтительные варианты выполнения настоящего изобретения, однако специалистам в данной области техники должно быть понятно, что раскрытые здесь варианты выполнения настоящего изобретения могут быть подвержены изменениям.
Соответственно, настоящее изобретение не должно быть ограничено раскрытыми вариантами его выполнения.
Например, гибкая стенка с чувствительными средствами может быть размещена в воспринимающей части 3, а гибкие стенки с датчиками могут быть размещены как на базовом конце, так и на конце для приема нагрузки.
Кроме того, рычаг 4 согласно настоящему изобретению может быть размещен в любом месте между гибкой стенкой 5 и частью 3 для приема нагрузки.
Кроме того, динамометрические элементы согласно настоящему изобретению могут иметь более двух рычагов, контактирующих с гибкой стенкой, что позволяет подобрать деформацию гибкой стенки в зависимости от параметров конкретных датчиков.
Реферат
Изобретение относится к измерительной технике и может быть использовано для измерения механической нагрузки и силы. Устройство содержит тело с базовым концом, воспринимающую часть для восприятия нагрузки или силы и по меньшей мере две балки, соединяющих базовый конец и воспринимающую часть. По меньшей мере одна из указанных балок образует рычаг, соединяющий воспринимающую часть и гибкую стенку чувствительной камеры, расположенной на базовом конце. Гибкая стенка способна деформироваться в результате смещения воспринимающей части под действием указанного рычага, а чувствительные средства способны измерять деформацию гибкой стенки или напряжение в гибкой стенке. Технический результат заключается в создании высокоточных динамометрических элементов, на которых снижено влияние температурных воздействий производственной среды. 14 з.п. ф-лы, 24 ил.
Комментарии