Способ управления положением двери лифта и устройство для его осуществления - RU2068197C1
Код документа: RU2068197C1
Чертежи




Описание
Изобретение относится к системам управления положением двери лифта и может быть использовано для уменьшения опасности зажатия в дверях лифта.
Сущность изобретения поясняется чертежами,
где:
на фиг. 1 изображен вид спереди автоматической двери лифт
на фиг. 2 показана блок-схема;
на фиг. 3
приведена схема регулирования;
на фиг. 4 показана диаграмма кpивой перемещения;
на фиг. 5 приведена первая блок-схема работы устройства;
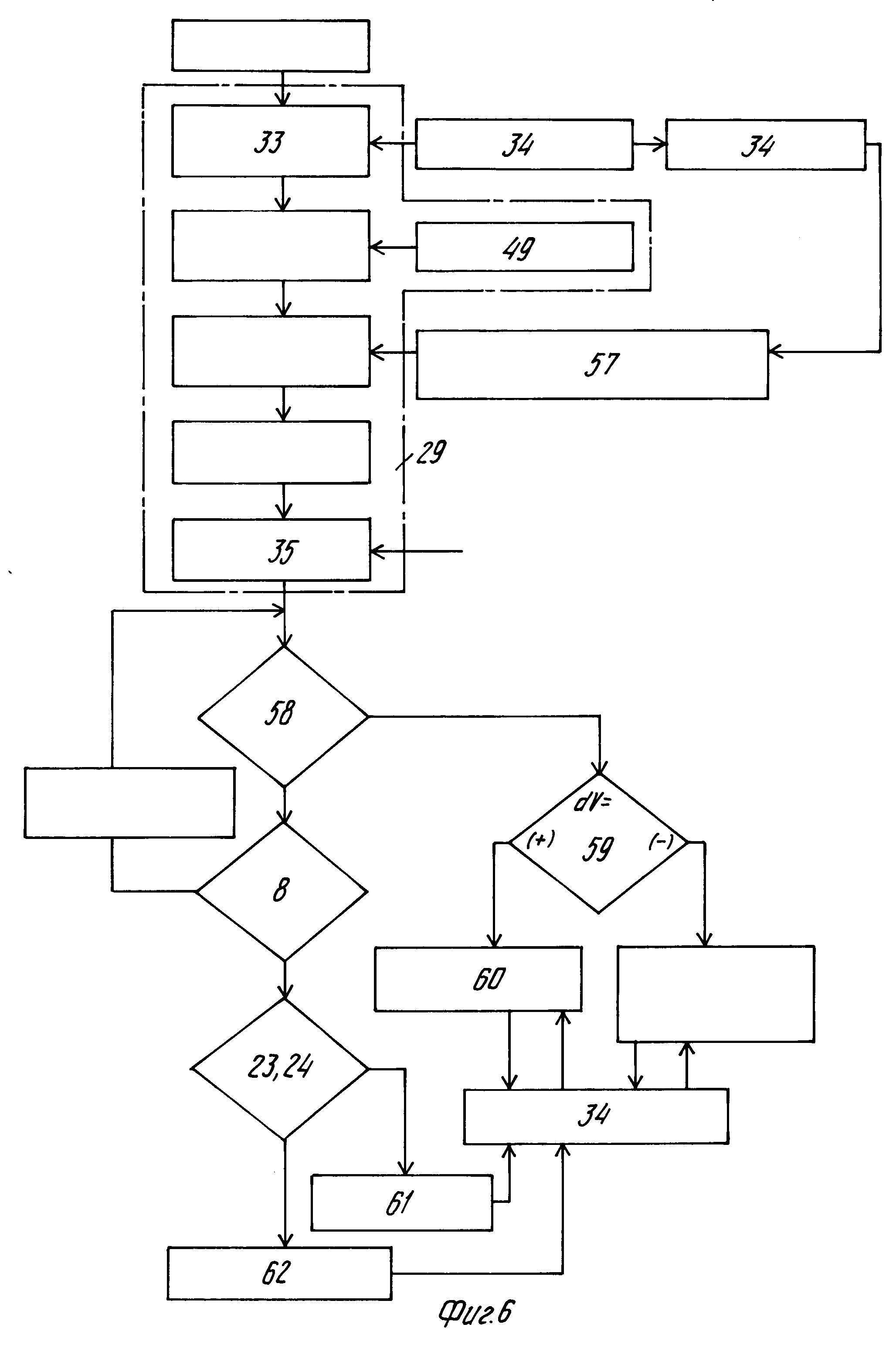
на фиг. 6 изображена
блок-схема.
На фиг. 1 представлена автоматическая дверь 1 лифта с двигателем 1 двери, блоком 2 управления приводом двери, ременным контрприводом 3 и приводной лентой 4. С помощью дверных захватов 5 перемещаются дверные створки 6, которые содержат дверные ролики 7. Также на фиг. 1 обозначены концевые выключатели 8, 9, разжимные захваты 10, предохранительные планки 11 с управляющими частями 12, направляющие детали 13, элементы 14 связи и переключательный кулачок 15, который на верхней кромке правой дверной створки 6 приводит в действие в открытом положении концевой переключатель 9 открытого положения, а в закрытом положении концевой переключатель 8 закрытого положения.
На фиг. 2 показана блок-схема, в которой представлены функциональные элементы и их отношения по отношению друг к другу на кабине 16 лифта. Блок 2 управления приводом дверью содержит узел 17 управления и переключающую схему 18. Двигатель 1 двери состоит из двигателя 19 постоянного тока и цифрового тахометра 20. Механический привод 21 состоит из приводных элементов 3, 4 и 5, представленных на фиг. 1. Захваты 10 шахтной двери воздействуют на шахтную дверь 22. Функциональные элементы 21, 6 и 22 воздействуют еще на механический стопор 23, а он на блокировочные контакты 24. Концевые переключатели 8, 9, приводимые в действие дверными створками 6 кабины 16 через переключательные кулачки 15 (фиг. 1) соединены с неизображенной на этой фигуре управляющей логической частью в узле 17, который передает соответствующие сигналы через подвесной кабель 25 в машинное отделение 26. Дверные предохранительные планки 11 и устройство 27 контроля за передним пространством реагируют на воздействия периферии 28 и соединены с блоком 17, а также с машинным отделением 26, в котором находится неизображенный на этой фигуре блок управления лифтом. Узел 29 питания обеспечивает питание всего блока 2 управления приводом двери.
На фиг. 3 показана схема регулирования с дверным приводом. Окруженная в рамку область блока 17 содержит все элементы регулирования двигателя двери. Датчик 29 заданного значения по существу состоит из запомненных кривых 30, 31 и 32 движения, а также из селектора 33 кривых движения, на который воздействует блок 34 управления лифтом. Из датчика 29 заданного значения заданное значение Vref поступает в первый компаратор 35, в который еще подается от цифрового тахометра 20 через цифроаналоговый преобразователь 36 действительное значение Vist. Следующий датчик 37 значения разности имеет первое соединение с компаратором 38 предельного значения и второе соединение со вторым компаратором 39. В компараторе 38 предельного значения, который через второй вход дополнительно еще получает значения допусков из датчика 29 заданного значения, в случае превышений соответствующие сигналы подаются в блок 34 управления лифтом. Селектор 40 учебного движения, на который оказывает воздействие блок 34 управления лифтом, приводит в действие вычислитель 41 учебного движения, который определяет значения для массовой компенсации 42 и фрикционной компенсации 43. В четвертом компараторе 44 эти значения суммируются, и их сумма подается во второй компаратор 39 в качестве компенсационного значения Vк. Выход второго компаратора 39 подведен к регулятору 45, в котором генерируется соответствующее значение установочной величины. Второй вход в случае управляющей части устройства соединен с блоком 34 управления лифтом. Двигатель 19 постоянного тока управляется переключающей схемой 18 по принципу модуляции ширины импульсов. Сила Fmat двигателя подается через третий компаратор 46 к нагрузке 47 привода, которая вызывает как реакцию противодействующую силу FA привода. Сила 48 внешней помехи действует в случае помехи как отрицательная сила Fw на третий компаратор 46. Соединение двигателя 19 постоянного тока с цифровым компаратором 20 является механическим. Цифровой компаратор 20 электрически соединен с цифровым фильтром 35, а через селектор 39 учебного движения с вычислителем 40 учебного движения. Узел 20 также соединен с интегратором 49.
На фиг. 4 показана диаграмма 50 с кривой движения закрытия, которая имеет угловые точки а, b, c, d, e. Кривая 51 действительных заданных значений получается с помощью округляющих фильтрационных схем из кривой 50 движения закрытия. Из кривой 51 действительных-заданных значений получается кривая 52 положительного допуска на расстоянии +dVmax и кривая 53 отрицательных допусков на расстоянии dVmax от кривой действительных заданных значений.
На фиг. 5 представлен этот процесс. Фильтр 54 округляет углы кривой 50 движения закрытия настолько, что из нее получается действительное-заданное значение 51, которое в этом виде имеется на выходе датчика 29 заданного значения как Vref. Он непрерывно определяет, например, 5%-ную часть мгновенного действительно-заданного значения 51 и таким образом получают предельное значение +dVmax положительного допуска. Затем значение это делят в делителе 55. В следующем инверторе 56 образуется предельное значение -dVmax отрицательного допуска.
На фиг. 6 показана блок-схема, которая представляет функцию движения закрытия двери. Здесь также обозначены позицией 57 логический узел управления дверью, позициями 58 и 59 этапы определения предельного значения, позицией 60 формирование сигнала неисправности, позицией 61 формирование сигнала разомкнутой цепи, позицией 62 генерирование сигнала квитирования.
Принцип работы устройства заключается в следующем.
При открытой двери и имеющейся команде движения для лифта блоком 34 управления лифтом селектор 33 кривой движения приводится в положение закрытия. Этот процесс проходит бесконтактно и в виде адресации запоминающего устройства. Кривая 50 движения закрытия, вызываемая в непредставленном запоминающем устройстве, еще выкладывается как несколько кривых с угловыми точками а, b, c, d, e и f. Эти угловые точки определяются по случаю первого учебного движения и расположены, например, следующим образом: а в окрестности 30% b в окрестности 50% с в окрестности 70% d в окрестности 75% е в окрестности 85% и f в окрестности 95% всего пути движения закрытия двери.
По истечении времени выдержки двери открытой, и если отсутствует обнаружение препятствия, логикой управления дверью производится инициирование движения закрытия двери. Затем подается Vref согласно действительному - заданному значению 51. В первый компаратор 35 подается действительное значение Vist, происходящее из цифрового тахометра 20 и преобразованное в цифроаналоговом преобразователе 36 в аналоговое значение. Затем разность обоих значений получается как ошибка dV регулирования.
В компараторе 38 предельного значения ошибка dV
регулирования проверяется на соответствие допуску. В
лишенном помех нормальном случае, т.е. при dV
Регулятор 45 генерирует управляющий сигнал для схемы 18, которая со своей стороны управляет двигателем 19 по вышеуказанному принципу модуляции ширины импульсов.
Сила Fmot двигателя противодействует силе FA реакции, вызываемой нагрузкой 47 привода, которая при ускорении имеет отрицательные значения, а при замедлении положительные значения. Третий компаратор 46 служит для представления сравнения сил и в действительности не имеется. В нормальном случае сила 48 внешней помехи, соответственно Fw не действует.
Временное изменение действительного-заданного значения 51 регулируется в зависимости от пути, что делается возможным с помощью цифрового тахометра 20 через интегратор 49.
Теперь процесс закрытия проходит до тех пор, пока дверь не закроется, что детектируется концевым переключателем 8 закрытого положения. В таком случае в качестве завершения операции закрытия происходит механическая и электрическая блокировка, а также удержание в закрытом состоянии закрытой и заблокированной двери с помощью уменьшенной силы двигателя или с помощью предусматриваемого в случае необходимости удерживающего тормоза, который здесь не представлен. Эти функции также управляются с помощью блока 34 управления лифтом через логику 57 управления дверью. В случае неправильной электрической блокировки образуется сигнал 61 неисправности "электрическая цепь разомкнута", а в нормальном случае генерируется сигнал 62 квитирования, причем оба сигнала предназначены для блока 34 управления лифтом.
Однако, предмет изобретения относится к случаю неисправности, что теперь будет объяснено ниже.
Сила 48 внешней помехи возникает в случае наезжания на препятствие, причем для наглядности примера принимается, что предохранительные планки 11 и устройство 27 контроля за передним пространством умышленно или неумышленно не действуют.
Описание для этого случая начинается с ограничителя 38 предельного значения. В блок-схеме, представленной на фиг. 5, его функция разделена на два этапа, причем на первом этапе 58 устанавливается превышение предельного значения, а на втором этапе 59 определяется его полярность.
Отрицательное значение означает: действительное значение Vist стало меньше мгновенного действительного-заданного значения 51, соответственно Vref более, чем на -dVmax. Положительное значение означает: действительное значение Vist стало больше мгновенного значения Vref более, чем на +dVmax.
Последнее может, например, произойти при разрыве ремня, причем в таком случае внезапно отделившийся двигатель 19 постоянного тока кратковременно генерирует до регулировки такие значения через цифровой тахометр 20 и цифровой фильтр 36. Затем в последовательности образуется сигнал 60 неисправности, после чего происходит отключение с помощью блока 34 управления лифтом, соответственно логики управления дверью. Если закрывающаяся дверь, останавливается или тормозится с помощью силы 48 внешней помехи, то возникает отрицательное превышение, т.е. dV > -dVmax. В этом случае двигатель постоянного тока тормозится до остановки электродинамически, а в случае необходимости механически, и начинается реверсирование, т.е. движение открытия.
В этой связи необходимо еще ответить на вопрос, почему -dVmax превышается при допустимом максимальном силовом воздействии, равном, например, 150 Н. Характеристика двигателя и коэффициент усиления регулирования дают при определенной силе 48 внешней помехи воспроизводимую ошибку dV регулирования. Эти оба фактора позволяют определить соответствующие положительную 53 и прежде всего отрицательную кривую 52 допуска.
Требуется чтобы значения срабатывания для остановки и реверсирования оставались постоянными. Это обеспечение постоянства достигается путем суммирования действительного компенсационного значения Vk во втором компараторе 39. Действительное компенсационное значение Vk при каждом учебном движении определяется заново. Учебное движение и определение компенсационного значения осуществляются следующим образом.
Как упоминалось в начале, датчик 29 заданного значения имеет кривую 30 учебного движения, которая при необходимости вызывается из блока 34 управления лифтом с помощью селектора 33 кривой движения. Одновременно приводится в действие также и селектор 40 учебного движения, и учебное движение осуществляется как движение закрытия с постоянной и очень малой скоростью. Временное изменение ошибки dV регулирования, зарегистрированное при этом с помощью вычислителя учебного движения, дает в фазе ускорения указание на подлежащую ускорению массу, а по всему изменению информацию о фрикционных соотношениях с помощью установленной ошибки dV регулирования. С первым вычисляется значение 42 компенсации массы, а со вторым значение 43 компенсации трения. Оба компенсационных значения, вместе подсчитанных в четвертом компараторе 44, затем при любом нормальном движении закрытия подаются во второй компаратор 39.
Таким образом, постоянно компенсируются медленно изменяющиеся условия трения и значение срабатывания для ограничения усилия закрытия удерживается постоянным.
Самое первое учебное движение служит, как общепринято, для регистрации данных о пути, с помощью которых затем определяются угловые точки, ускорения и скорости для кривых 31 и 32 движения. Учебные движения могут по необходимости осуществляться через любые промежутки времени. Это может производиться через 24 часа или даже при каждом закрытии двери без команды движения для лифта.
В случае чрезмерного, соответственно определенного ухудшения КПД более не образуется никаких компенсационных значений Vk , однако вместо них в блок управления лифтом подается сигнал неисправности. Для плавного ускорения и тем самым также для большой достижимой скорости двери, в частности, для движения открытия требуются соответственно большие токи двигателя. Вследствие существующей тепловой инерции электродвигателя, соответственно, двигателя постоянного тока такой двигатель может быть кратковременно без повреждения нагружен очень большими токами, которые в несколько раз превышают допустимый ток длительной нагрузки. Предел тока задается только угольными щетками и коллектором, которые однако при необходимости могут быть сняты. Предпочтительно предусмотреть ограничение тока в виде электронного предохранителя в качестве полупроводниковой защиты в переключательной электронике. Кроме того, требуется, чтобы защита от зажатия оставалась действенной до конца движения закрытия. С помощью описанного способа и устройства возможно обеспечить работу ограничителя усилия закрытия вплоть до последнего миллиметра движения закрытия. Это особенно эффективно против зажатия и повреждения узких человеческих конечностей, как, например, рук и пальцев, однако также и частей одежды. Важность защиты от зажатия в последней фазе движения закрытия следует выделить также еще и под другим аспектом. Как показано на фиг. 1, обычно автоматические двери 1 лифта оснащены предохранительными планками 11. Однако, они выполняют свою функцию только до определенного расстояния друг от друга. Когда передние кромки двери при движении закрытия приблизятся друг к другу на расстояние, например, от пяти до двух сантиметров, системы детектирования предохранительных планок должны быть сделаны нечувствительными или даже отключены с целью предотвращения собственных детектирований. ЫЫЫ2 ЫЫЫ4
Реферат
Использование: системы управления положением двери лифта. Сущность изобретения: задают величину допуска ошибки регулирования скорости двигателя привода перемещения дверных створок и при возникновении усилия внешней помехи, обусловленной находящимся в дверных створках лицом или предметом и мешающей закрытию двери, двигатель привода перемещения дверных створок останавливают или реверсируют при превышении ошибкой регулирования скорости двигателя привода перемещения дверных створок, обусловленной усилием внешней помехи, величины заданного допуска ошибки регулирования скорости двигателя привода перемещения дверных створок. 6 ил.

Комментарии