Устройство на основе лазера для измерения расстояния до совместной цели и/или уровня жидкости - RU2101731C1
Код документа: RU2101731C1
Чертежи







Описание
Изобретение относится к измерению расстояния, в частности расстояния на основе когерентной интерференции лазерного диода.
Известно, что полупроводниковые лазеры, например лазерные диоды, можно применять для измерения расстояния, как описано Дж. Бехеймом и др. в их статье "Измерение расстоянии с использованием модулированного по частоте лазерного диода", Прикладная оптика, т.25, N 9, 1986. Также известно, что для измерения уровня жидкости можно использовать излучение.
Лазерный диод обычно имеет оптический резонатор, содержащий два противоположно расположенных торца (называемые торцевые грани), причем каждый торец имеет известный показатель преломления и среду между ними, усиливающую излучение. Внутри резонатора лазерного диода генерируется излучение при пропускании электрического тока через p-n-переход диода (обычно используют торцы диода, иначе говоря, его грани). Излучение внутри диодного резонатора отражается с периодическим повторением от первой (например, передней) грани к второй (например, задней) грани, таким образом обеспечивается стимулированное излучение и хорошо известное лазерное действие. Обычно передняя и задняя грани являются частично прозрачными (т.е. не на 100% отражательные). Таким образом часть излучения выходит из лазера как с передней, так и с его задней граней. Количество излучения, оставляющего непокрытую грань, определяют по ее показателю преломления.
Как известно, на режим работы лазерного диода может оказывать значительное влияние внешняя оптическая обратная связь, то есть обратная связь части лазерного выходного излучения назад в лазерный резонатор от внешней отражающей поверхности, как описано в статье: Р.Лэнга и др. "Эффекты внешней оптической обратной связи на свойства инжекционного полупроводникового лазера", IEEE Джорнел ов Квантум Электроникс, т.QE-16, N 3, март 1988. Лазерный диод вместе с внешней отражающей поверхностью, например отражающей целью, можно рассматривать как составной или связанный лазерный резонатор, состоящий из диодного резонатора и внешнего резонатора, образованного отражающей целью и гранью лазерного диода, обращенной в сторону цели (например, передняя грань). Расстояние от лазера до внешней поверхности не должно быть больше, чем половина когерентной длины (расстояние, при котором фотоны остаются в одинаковой фазе) выходного излучения, поскольку излучение должно оставаться когерентным на всем расстоянии движения (то есть от него к цели и назад к лазеру ). Эффекты спаренного резонатора в обычных лазерах хорошо известны и они описаны в патенте США N 4550410, озаглавленном "Лазер со спаренным резонатором", выданном Ченауски и др.
Также известно, что если ток, проходящий через лазерный диод, изменяется от одного уровня до другого, то оптическая частота, на которой он работает (или генерирует когерентное излучение в оптическом диапазоне,также называемая несинхронизированная частота лазерного диода), будет изменяться в ответ на это. Точнее сказать, когда ток увеличивается, длина волны лазерного диода становится больше и, следовательно, частота, на которой он работает, уменьшается. Как известно, это происходит потому, что температура материала лазерного диода изменяется в зависимости от тока, который вызывает изменение в показателе преломления материала, что приводит к изменению длины Ld оптического пути (также называют как эффективная длина резонатора диода), которая является произведением показателя преломления материала лазера и физической длины резонатора лазера.
Также известно, что когда оптическая рабочая частота лазера изменяется, интенсивность выходного излучения,
испускаемая от грани,
которая не обращена в сторону цели, будет создавать мелкие пульсации или волнообразные импульсы (их также называют mode-hops или скачки видов колебаний). Эти импульсы
интенсивности являются
результатами когерентной интерференции внутри лазерного диода между излучением, отраженным от цели (которое повторно поступает от грани, обращенной в сторону цели), и
излучением внутри лазерного диода
(при условии, что расстояние от лазера до цели остается постоянным). Как известно, импульсы возникают при интервалах рабочей частоты лазера, равных разности частот
между последовательными модами
внешнего резонатора:
C/2L,(I)
где C скорость излучения;
L расстояние от передней грани до цели.
Также известно, что эти импульсы можно легко обнаружить посредством дифференцирования сигнала интенсивности излучения, испускаемого от задней грани.
Если цель представляет собой целое число длин Ld оптического пути резонатора от лазерного диода, то создается максимальная конструктивная когерентная интерференция, при этом амплитуда импульсов интенсивности выходного сигнала будет максимальной. Аналогично, если расстояние от цели до лазерного диода представляет собой кратное Ld, выраженное не целым числом, то амплитуда импульсов будет уменьшаться из-за эффектов затягивания моды (как описано Лэнгом и др.), однако все же ее можно измерить. Таким образом,пиковая амплитуда импульсов интенсивности изменяется в зависимости от расстояния, однако же ее все же можно измерить независимо от того, является ли цель целым кратным числом Ld от лазера, как описано Лэнгом и др.
В известных экспериментах по измерению расстояния лазерным диодом, описанных Лэнгом и др. и Бехеймом и др. применяли известный фотодетектор и соответствующую электронику для измерения излучения, испускаемого задней гранью лазера и образования сигнала напряжения, указывающего на него. Сигнал напряжения от детектора анализируют для определения расстояния.
Расстояние L от передней грани до цели определяют по известному уравнению
L = Nc/2ΔF, (2)
где N количество
импульсов интенсивности
(или скачки видов колебаний от внешнего резонатора), которые возникают при изменении частоты F лазера;
c скорость излучения;
ΔF изменение частоты
лазера,
которое
имеет место из-за изменения тока возбуждения лазерного диода. Величина L значительно больше (на много порядков величины) длины оптического пути лазерного резонатора. Таким
образом,расстояние L до цели
можно определить просто путем подсчета количества скачков видов колебаний (mode-hops), которые возникают в результате изменения частоты ΔF лазера. Как известно,
теоретическим разрешением в
измерении расстояния является расстояние, соответствующее одному скачку моды колебаний или
ΔL = c/2ΔF (3)
Таким образом, если частота
ΔF равна 50 ГГц, то
ΔL3 мм, что является хорошей разрешающей способностью, как описано у Бехейма и др. Для расстояния, равного 1 м, количество импульсов на пилообразном сигнале
составляет примерно 300.
Также известно, что если цель находится в движении (то есть имеет определенную скорость), то на выходном сигнале лазера будут появляться дополнительные импульсы (с описанными подобными характеристиками амплитуды) из-за известного эффекта Доплера (так называемая частота Доплера, Fd). Это происходит независимо от того, изменяется или нет со временем ток возбуждения лазерного диода (то есть частота сигнала лазера в оптическом диапазоне). Следовательно, общее количество импульсов на развертку по току возбуждения (здесь назван как период пилообразного сигнала), испускаемых лазером, связано с расстоянием (Fx) и скоростью (Fd) цели. Точнее для пилообразного сигнала тока возбуждения с повышением и понижением (пилообразный сигнал с положительным наклоном, после которого следует пилообразный сигнал с отрицательным наклоном), когда ток возбуждения увеличивается, а цель перемещается в сторону лазера, количество импульсов, видимых на обратной связи, составляет Fx + Fd. Напротив, когда ток возбуждения уменьшается, а цель перемещается в сторону лазера, количество видимых импульсов равно Fx Fd. Если величина Fd больше, чем Fx (то есть цель перемещается быстрее, чем при определенной скорости), то результат отношения Fx Fd является отрицательным, при этом направление импульсов на уменьшающемся наклоне будет изменять полярность. Если цель перемещается в сторону от лазера, то указанные отношения будут такими же, за исключением того, что знак Fd будет изменяться в обоих случаях, как это известно.
Однако, когда пытаются измерять расстояние на основе когерентной интерференции лазерного диода в реальных условиях, то возникает множество проблем. Во-первых, одной из самых больших проблем, связанных с обнаружением когерентного излучения, являются помехи в виде пятен. Как известно, помехи в виде пятен представляют собой оптические помехи, возникающие в результате рассеяния когерентного излучения, когда оно падает на поверхность, которая не является совершенно плоской (по шкале длин волн). Также все цели демонстрируют ограниченную поверхностную вибрацию, которая увеличивает помехи в виде пятен. Кроме того, если цель является плавающей, например поплавок в топливном баке автомобиля, то будет отмечаться некоторое движение (колебание, которое также увеличивает помехи в виде пятен). Эти помехи мешают обнаружению когерентного излучения и могут привести к периодическому снижению оптической интенсивности в функции расстояния до цели, тем самым препятствуя измерению интенсивности на определенном расстоянии (то есть измерение не достигается) и делая измерение расстояния неточным. Также обычно применяют сфокусированный луч (как показано Бехеймом и др. и Лэнгом и др.) для достижения требуемой интенсивности на цели и обеспечения соответствующей оптической обратной связи.
Во-вторых, Бехейм и др. описывает применение пилообразного сигнала тока с повышением и понижением для возбуждения лазерного диода; однако пилообразный сигнал тока возбуждения с повышением и понижением вызывает смещение постоянного тока в дифференцированной форме импульса, которое изменяется в функции количества импульсов, видимых в данный период времени пилообразного сигнала, в результате амплитуды импульсов будут неодинаковыми, что может привести к неточному измерению расстояния. Кроме того,пилообразный сигнал с повышением и понижением может генерировать импульсы интенсивности в двух противоположных полярностях, таким образом потребуется электронное оборудование для обнаружения обеих полярностей. Также пилообразный сигнал с повышением и понижением вводит неточность вследствие резкого изменения наклона формы волны (от положительного до отрицательного).
Цели изобретения включают в себя разработку устройства на основе лазера для измерения расстояния и/или уровня жидкости, которое позволило бы уменьшить помехи в виде пятен, использовать минимум медленно действующей электроники и уменьшить неточность, вызванную перерывами в сигнале возбуждения лазера.
Согласно первому аспекту настоящего изобретения, лазер, например лазерный диод, имеющий переменную рабочую частоту, регулируемую сигналом возбуждения лазера, испускает выходное излучение, которое преобразуется в коллимированный луч и направляется на цель (или поплавок), имеющую определенные оптические свойства; выходное излучение отражается целью и возвращается назад в лазер; при этом отраженным излучением и излучением внутри лазера создается когерентная интерференция, таким образом образуется сигнал обратной связи, имеющей величину, соответствующую расстоянию от лазера до цели. Согласно дополнительному признаку изобретения,цель плавает на жидкости. В соответствии с еще одним дополнительным признаком изобретения применяют трубку для поплавка и измеряемой жидкости.
Согласно второму аспекту изобретения, лазер, например лазерный диод, имеющий переменную рабочую частоту, регулируемую по сигналам возбуждения лазера, испускает выходное излучение, которое преобразуется в коллимированный лазерный луч и падает на цель (или поплавок), имеющую определенные оптические свойства; выходное излучение отражается целью и возвращается обратно в лазер; при этом между отраженным и излучением внутри лазера отмечается когерентная интерференция, в результате образуется сигнал обратной связи, имеющий величину, соответствующую расстоянию от лазера до цели; причем часть сигнала обратной связи не используется (пропускается) для исключения отклонений в измерении расстояния из-за резких изменений в сигнале возбуждения лазера (т.е. когда возникают перерывы в интенсивности) и/или из-за электронных помех (вызванных дифференцированием или другой обработкой сигнала).
Согласно настоящему изобретению,применяют аппаратуру, которая улучшает точность и надежность лазерных датчиков измерения уровня жидкости за счет уменьшения помех в виде пятен, уменьшения количества электронных элементов, применения низкочастотного электронного оборудования и уменьшения эффектов перерывов в токе возбуждения, которые могут привести к неточностям в измерении уровня жидкостей. Изобретение можно использовать для любого измерения уровня жидкости, например в указателе уровня бензина или в датчике уровня масла для транспортного средства. Дополнительным преимуществом изобретения является то, что используется когерентное излучение, таким образом требуется минимальное обратное рассеяние (нановатты), причем оно не нарушится некогерентным излучением, например солнечный свет, уличные лампы или фары автомобиля. Кроме того, если применяют трубку, то в баке можно разместить подвижные перегородки для дополнительного уменьшения выбрасывания жидкости в баке без создания помех для поплавка или способа измерения.
Указанные и другие цели, признаки и преимущества настоящего изобретения станут более очевидными в свете последующего подробного описания примеров его исполнения со ссылкой на приложенные фигуры.
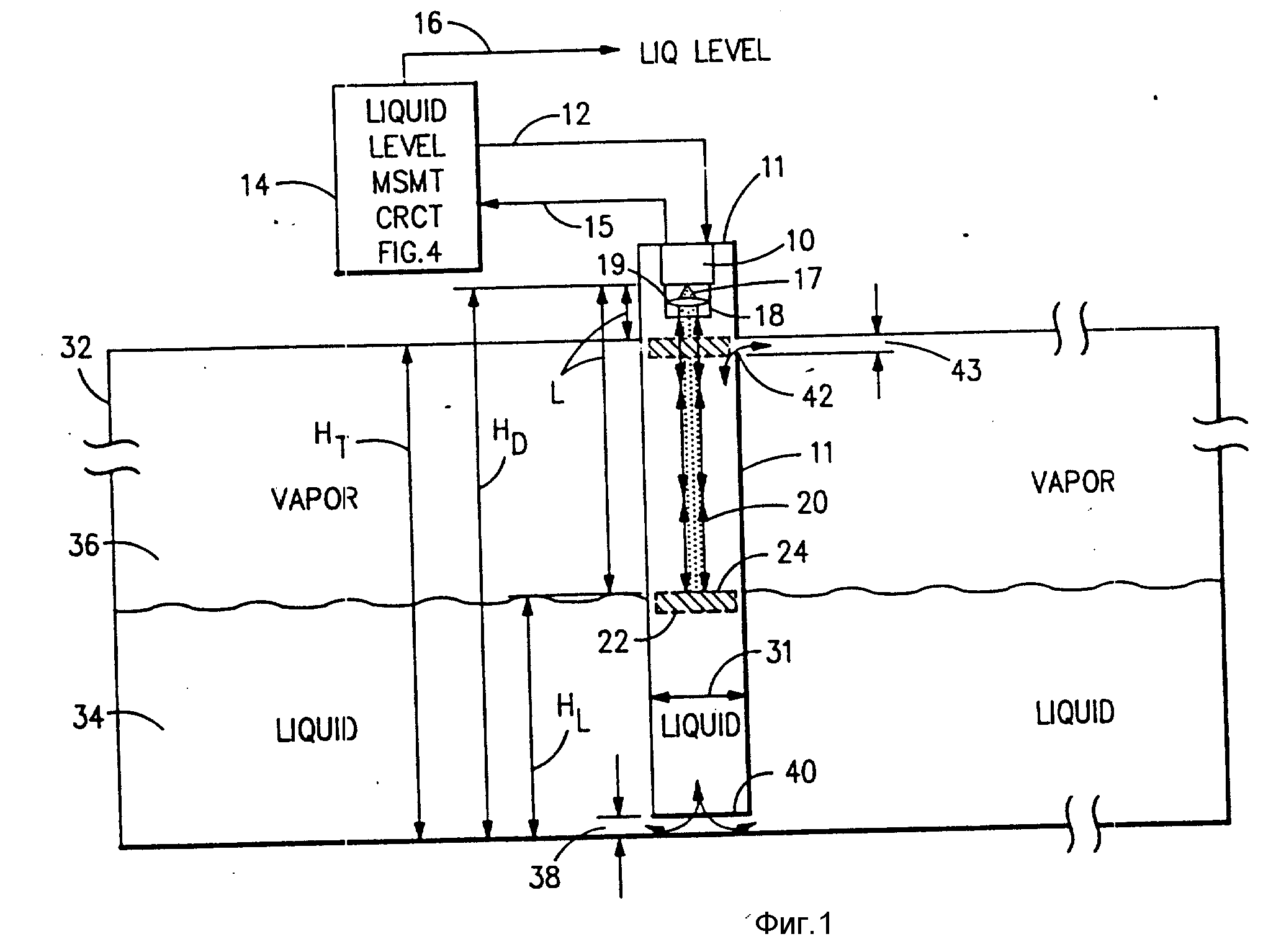
На фиг.1 дан схематический вид устройства для измерения уровня жидкости; на фиг. 2 вид сбоку поплавка, расположенного внутри устройства, представленного фиг. 1, показывающий необязательные фланцы, которые можно добавить для устойчивости; на фиг. 3 два вида нижней части трубки, расположенной внутри устройства, представленного на фиг. 1, показывающие: а) сетчатое днище,в) уплотненное днище с отверстием; на фиг.4 схематическая схема системы измерения уровня жидкости внутри устройства, представленного на фиг.1; на фиг. 5 схематическая блок-схема функционального генератора внутри системы, представленной на фиг. 4; на фиг.6 схематическая блок-схема формирователя сигналов внутри системы, показанной на фиг.4; на фиг.7 - диаграмма сигналов, образующихся в цепи функционального генератора внутри системы, представленной на фиг.4; на фиг.8 диаграмма в крупномасштабном увеличении импульса запирающего сигнала и сигнала установки интегратора в начальное состояние; на фиг.9 другой пример исполнения настоящего изобретения, в котором поплавок не применяют.
Оптимальный способ осуществления изобретения.
Как показано на фиг.1, устройство для измерения уровня жидкости лазерным диодом включает в себя блок 10 известного лазерного диода, например Мицубиси ML 3108, который содержит лазерный диод и фотодиод, подобный тому, который показан на фиг.1 в совместно рассматриваемой заявке США, UTC Docket NR-3418, поданной одновременно с этой заявкой. Блок 10 лазерного диода установлен на верхнем конце цилиндрической трубки 11 (будет описана) и приводится в действие сигналом тока возбуждения на линии 12 от цепи 14 измерения уровня жидкости (будет описана). Блок 10 лазерного диода посылает электронный сигнал обратной связи на линии 15 (от фотодиода внутри блока лазерного диода), указывающий на оптическую обратную связь от лазерного диода. Схема 14 измерения уровня жидкости считывает сигнал на линии 15 и образует сигнал на линии 16, указывающий высоту жидкости (или текучей среды). Блок 10 лазерного диода также создает рассеивающееся выходное излучение 17.
На блоке 10 лазерного диода установлен блок 18 линзы, содержащий известную линзу 19, например градуированную стержневую микролинзу (линзаGRIN) фирмы Ниппон Шит Гласс Компани (NSG)W 30-0110-078, имеющую диаметр 3 мм, длину 3,3 мм и противоотражательное покрытие. Линза 19 установлена на известном расстоянии, например 3/16" (4,8 мм) от блока 10 лазерного диода для образования коллимированного выходного лазерного луча 20, имеющего диаметр примерно 1/8 (3,2 мм). Если это требуется, то можно применять линзы другого диаметра при условии, что интенсивность достаточно высокая для создания соответствующего отраженного луча. Либо линзу 19 можно прямо соединить с блоком 10 лазерного диода. Коллимированный луч 20 падает на поплавок (или цель) 22, который расположен на переменном расстоянии L от блока 10 лазерного диода. Поплавок отражает лазерный луч назад через линзу 19 в блок 10 лазерного диода, что способствует созданию когерентной интерференции внутри лазерного диода, как было описано. Выходной сигнал на линии 15 от блока 10 лазерного диода посылает импульсы, наложенные на форму волны сигнала возбуждения, которые указывают расстояние L от передней части блока 10 лазерного диода до поплавка 22, как было описано.
Размер поплавка 1/4" (6,4 мм) в диаметре (слегка меньше диаметра трубки 11) и примерно 3/16" (4,8 мм) толщины; однако, если это требуется, то можно применять другие геометрии и другую толщину. Поплавок может быть изготовлен из сплошной или полой пластмассы, древесины или любого другого плавучего материала. Верхняя поверхность 24 поплавка 22 покрыта отражающей лентой, например отражающей лентой марки Scotchlite,для обеспечения максимального отражения коллимированного лазерного луча 20 назад к блоку 10 лазерного диода. Как верхняя, так и нижняя стороны поплавка могут быть покрыты отражающей лентой, если это требуется в том случае, когда поплавок переворачивается. Вместо отражательной ленты можно применять другие подобные средства при условии, что будет обеспечиваться соответствующее отражение.
Поплавок 22 расположен в цилиндрической трубке 11 диаметром 31 примерно 3/8" (9,5 мм), которая установлена в баке 32, имеющем обычно высоту Hт примерно 1 фут (0, 305 м) и содержащем жидкость 34, например бензин и пар (или воздух) 36. Верхний конец трубки 11 поднят над верхней частью бака 32 так, чтобы блок 18 линзы находился заподлицо с верхней частью бака или выше ее для измерения уровня жидкости, когда поплавок 24 расположен в верхней части бака. Трубка 11 проходит в бак 32 на расстояние, которое слегка меньше высоты Hт бака на расстояние 38, например, 1/4" (6,4 мм). Трубку 11 можно изготовить из стекла, пластмассы, металла или другого непористого материала. Либо вся трубка 11 может быть выполнена из сетки или перфорированного материала, однако это может привести к повышению турбулентности жидкости на поплавке 22. Также трубка 11 необязательно должна быть цилиндрической по форме при условии, что поплавок сможет перемещаться вертикально при изменении уровня жидкости. Жидкость 34 входит и оставляет трубку 11 через нижний конец 40 трубки 11, который может быть полностью открытый (т.е. не закрыт); однако жидкость 34 может входить и выходить из трубки 11 с боков, а не через ее нижний конец 40 или также и через нижний конец. Трубка 11 также имеет выпускное отверстие 42, вблизи ее верхнего конца, диаметром 43 примерно 1/8" (3,2 мм). Выпускное отверстие 42 позволяет пару свободно входить и выходить из трубки 11, таким образом исключается перепад давления между паровой зоной внутри трубки 11 (над поплавком 22) и паровой зоной 36 снаружи трубки 11. Понятно, что выпускное отверстие 42 необходимо только, если трубка 11 изготовлена из сплошного материала.
Обратимся к фиг.2, если поплавок 22 очень тонкий и требуется исключить перевертывание поплавка 22, то поплавок может иметь один или несколько фланцев 220 (или направляющие), выступающих от верхней стороны 24 или/и от нижней стороны поплавка 22. Однако, если фланцы выступают от нижней стороны поплавка 22, то возможно потребуются соответствующие канавки в баке 32, чтобы можно было измерять уровень жидкости до дна бака 32.
Как показано на фиг.3, нижний конец 40 трубки 11 можно покрыть сеткой 222 или полностью закрыть, за исключением небольшого отверстия 224. Для уменьшения скорости потока жидкости 34 внутрь трубки 11 и из нее и чтобы уменьшить турбулентность потока жидкости на поплавке 22, можно эффектно использовать отверстие 224. Закрытие нижнего конца 40 трубки 11 также позволяет предупредить выпадение поплавка 22 из трубки 11 во время установки трубки 11 в баке 32.
Как показано на фиг.4, система 14 для измерения уровня жидкости включает в себя функциональный генератор 100, который посылает сигнал напряжения на линии 102 в задающее устройство 104 лазерного диода, например Melles Griot часть N 06DLD201. Задающее устройство 104 лазерного диода преобразует сигнал напряжения, которое составляет от 0 до 20 мВ, на линии 102 в сигнал тока величиной от 29 до 31 мА (фиг.7, снимок d) на линии 12, который возбуждает блок 10 (фиг.1) лазерного диода. Можно применять другие задающие устройства для лазерного диода и другие интервалы величин напряжения и тока, если это потребуется. В соответствии с изобретением возбуждение лазерного диода осуществляется в активной зоне диода посредством пилообразного сигнала тока возбуждения на линии 12, состоящего из ряда последовательных периодических пилообразных сигналов с положительным наклоном (фиг.7, снимок d), со смещением постоянного тока на величину примерно 30 мА. Если это требуется, то можно применять другие интервалы и смещения сигналов. Частота развертки сигнала тока возбуждения на линии 12 равняется 2 кГц; однако, если это требуется, то можно применять другие частоты, как будет описано. Функциональный генератор 100 также генерирует запирающий сигнал на линии 106 (будет описано).
Теперь рассмотрим фиг. 5. Функциональный генератор 100 включает в себя генератор колебаний 300, например счетчик-таймер Texas Instruments 555 с соответствующими наружными резисторами и конденсаторами. Генератор колебаний 300 посылает синхронизирующий сигнал прямоугольной формы (фиг.7, снимок a) на линии 302 на вход нарастающего фронта импульса 304 с однотактовым режимом, например National Semicond, CD 45283, которое посылает импульс высокого уровня с заданной длительностью по времени, например 10 мкс, на линии 106, когда сигнал синхронизации изменяется от состояния низкого уровня до состояния высокого уровня. Полученная форма волны (фиг.7, снимок b) представляет собой короткий импульс высокого уровня вначале каждого периода пилообразного сигнала (фиг. 7, снимок b) и его называют запирающим сигналом (будет описано).
Синхронизирующий сигнал на линии 302 также связан с входом нарастающего фронта импульса второго устройства 306 с однотактовым режимом (такое же, как первое устройство 304 с однотактовым режимом), которое также посылает импульсный сигнал высокого уровня с заданной длительностью по времени меньше, чем продолжительность запирающего сигнала, например 1 мкс линии 308, когда синхронизирующий сигнал изменяется от состояния низкого уровня до состояния высокого уровня, то есть так называемый сигнал установки интегратора в начальное состояние (фиг.7, снимок c). Линия 308 соединена с восстанавливаемым электронным интегратором 310, содержащим оптический усилитель A1 с конденсатором C1 и резистором R1, имеющим конфигурацию стандартного инвертирующего интегратора, и с аналоговым переключателем 312, например аналоговые устройства АД7512, параллельно соединенного с конденсатором C1 для обеспечения способности возврата к начальному состоянию.
Заданное эталонное напряжение Vint интегратора создается на линии 314 к интегратору 310, который интегрирует напряжение Vint со скоростью, определенной резистором R1 и конденсатором C1, как это известно. На линии 308 к интегратору 310 образуется сигнал установки интегратора в начальное состояние, который посылается в аналоговый переключатель 312. Когда сигнал установки интегратора в начальное состояние -низкого уровня, переключатель размыкается, а интегратор 310 интегрирует входной сигнал Vint. Напротив, когда сигнал установки интегратора в начальное состояние высокого уровня, переключатель 312 замыкается, таким образом происходит зашунтирование накоротко конденсатора C1 и установка на OV выходного напряжения на линии 102. Результирующий сигнал имеет пилообразную форму волны (фиг.7, снимок d) на линии 102, причем этот сигнал используют для возбуждения блока 10 лазерного диода. Понятно, что продолжительность импульсов установки интегратора в начальное состояние должна быть достаточной, чтобы конденсатор C1 смог разрядиться до заданного уровня напряжения. Если это требуется, то можно применять другие варианты исполнения интегратора 310, который может возвращаться к начальному состоянию.
Как показано на фиг.4, сигнал тока на линии 15 от блока 10 лазерного диода (фиг. 1) передается в известный преобразователь 110 тока в напряжение (I/V), который преобразует входной ток в выходное напряжение на линии 112, имеющее характеристики, подобные характеристикам входного напряжения, т.е. пилообразные сигналы и импульсы, связанные с изменением интенсивности, но в единицах напряжения. Преобразователь 110 тока в напряжение содержит широкополосный операционный усилитель с низким уровнем шумов, фотодиод внутри блока 10 лазерного диода, резисторы, конденсаторы и напряжение смещения, подобные тем, которые описаны в упомянутой одновременно рассматриваемой заявке. Преобразователь тока в напряжение также уменьшает высокочастотные помехи посредством уменьшения частот больше, чем на 1,6 МГц, и смещения уровня выходного напряжения постоянного тока до заданного уровня. Как описано в упомянутой одновременно рассматриваемой заявке, сигнал выходного напряжения на линии 112, подобный форме волны 200 (фиг.4, снимок a), связан с током через фотодиод. Изменение в выходном напряжении составляет примерно 150 мВ, которое соответствует изменению на 2 мА в интервале тока возбуждения лазерного диода (и следовательно, в интенсивности выходного сигнала) от 29 до 31 мА. Аналогично импульсы напряжения в интервале от 1 до 2 мВ максимум соответствуют импульсам тока, представляющим оптическую когерентную интерференцию, которая рассматривалась ранее. Если это требуется, то можно применять другие конфигурации преобразователя 110 тока в напряжение. Сигнал напряжения на линии 112 передается в фильтр верхних частот (HPF) 114, который действует в качестве дифференциатора для отделения и усиления высокочастотных импульсов (фиг.4, снимок a) от низкочастотного пилообразного сигнала (фиг. 7, снимок d). Более конкретно, фильтр верхних частот 14 представляет собой однополюсный фильтр с положительной характеристикой крутизны 20 дБ/декада, имеющий коэффициент усиления по постоянному току, равный нулю, и частоту разрыва 120 кГц, выше которой характеристика усиления фильтра является плоской при коэффициенте усиления 10. Выходной сигнал из фильтра верхних частот 114 представляет собой дифференцированный сигнал, подобный показанной форме волны 202 (фиг.4, снимок b). Фильтр 114 содержит оптические усилители, например ОР470, резисторы и конденсаторы в известной конфигурации с отрицательной обратной связью, подобной конфигурации, описанной в упомянутой одновременно рассматриваемой заявке. Если это потребуется, то можно применять другие оптические усилители и конфигурации элементов.
Дифференцированный сигнал из фильтра верхних частот 114 передается на линии 116 в схему 118 формирования сигналов. Схема 118 формирования сигналов усиливает сигнал на линии 116,например, в 50 раз, удаляет смещение постоянного тока из формы волны, устанавливает на нуль (или запирает) часть сигнала, смещает уровень постоянного тока сигнала для получения постоянного значения (OV) для нижней части сигнала и обеспечивает некоторое ограничение фильтрование высокой частоты. Образованный на линии 112 сигнал (фиг.4, снимок c) имеет серию импульсов, проходящих от общего минимально напряжения (контрольная плоскость) величиной примерно 0 В. Если это требуется, то можно применять другое общее минимальное напряжение.
Более конкретно, как показано на фиг.6, схема 118 формирования сигналов включает в себя каскад усиления 250 (т.е.усилитель), содержащий известную электронику, например оптические усилители и резисторы, которые усиливают в 50 раз дифференцированный сигнал на линии 116. Если это потребуется, то можно применять другие каскады усиления. Усиленный дифференцированный сигнал передается на линии 252 на первый вход сумматора 255, где он добавляется к заданному напряжению V1 постоянного тока, подаваемому на линии 258 на второй вход сумматора 255, имеющему такую же величину и противоположный знак составляющей Vdc постоянного тока (фиг.4, снимок b) усиленного дифференцированного сигнала на линии 252, а результирующий сигнал образуется на линии 260, имеющей удаленную составляющую постоянного тока (сравните снимки b и c на фиг.4).
Обнаружено, что когда сигнал тока возбуждения диода на линии 12 (фиг.1, 4) резко изменяет фронт (т.е. демонстрирует прерывистость), то на сигнале оптической обратной связи образуются гармоники высокой частоты, вызывающие образование дополнительных импульсов за короткий отрезок времени, например 10 мкс, вблизи прерывистости, таким образом искажая измерения расстояния. Также установлено, что сигнал на линии 116 имеет пики 203 (фиг.4, снимок b) на спадающих фронтах пилообразного сигнала из-за эффектов дифференциатора фильтра верхних частот 114 и вызывает общее смещение в уровне сигнала, что приводит к неточности в измерении импульсов. Кроме того, установлено, что установка на нуль или запирание сигнала во время этого периода времени исключает искажение измерения без какого-либо ущерба значительной точности, как описано в упомянутой, одновременно рассматриваемой заявке.
Сигнал на линии 260 из сумматора 255 передается на один вход известного аналогового переключателя 262, например аналоговые устройства, часть АД7512. Другой вход переключателя 262 соединен с линией 264, которая подсоединена к заземлению (OV). Запирающий сигнал (фиг.7, снимок b) на линии 106 из функционального генератора 100 также передается переключателю 262 и управляет выбором выходного сигнала, образованного на линии 270. Когда запирающий сигнал высокий, переключатель 262 передает на линию 270 сигнал из сумматора 255 на линии 260. Аналогично, когда запирающий сигнал низкий, переключатель 262 передает на линию 270 сигнал OV на линии 260. Как было описано, запирающий сигнал (фиг.4, снимок b) посылает короткий импульс во время перерывов в пилообразном сигнале тока возбуждения (фиг.4, снимок d), то есть в конце пилообразного сигнала. Таким образом выходной сигнал на линии 270 подобен входному сигналу на линии 260,за исключением, что сигнал устанавливается на 0 в течение короткого периода времени, например 10 мкс, в начале каждого изменения тока (из-за импульсов запирающего сигнала). Таким образом,эти импульсы фактически запирают сигнал на линии 260. Если помехи, возникающие из-за высокочастотных составляющих в оптическом сигнале обратной связи, отраженном назад от цели 26 или от фильтра верхних частот, не представляют проблему, то переключатель 262 можно удалить, если это потребуется.
Как показано на фиг.8, идеально для данного периода пилообразного сигнала (фиг. 7, снимок b) каждый импульс запирающего сигнала (фиг.7, снимок b) на линии 106 должен иметь его нарастающий фронт прежде, чем каждый импульс установки интегратора в начальное состояние (фиг.7, снимок c) на линии 308, и иметь спадающий фронт после каждого импульса сигнала установки интегратора в начальное состояние для обеспечения запирания требуемого сигнала в течение непродолжительного времени до и после спадающего фронта пилообразного сигнала. Однако нарастающие фронты запирающего сигнала и сигнала установки интегратора в начальное состояние могут возникнуть одновременно (как показано на фиг.7), поскольку имеется достаточная задержка по времени между разрывом в спадающем фронте пилообразного сигнала и его эффектом на сигнал обратной связи на линии 15 из блока 10 лазерного диода, чтобы переключатель 262 мог запирать требуемый сигнал.
Как показано на фиг.6, схема 118 формирования сигналов также включает в себя цепь 272 восстановления постоянного тока, в которую подается сигнал на линии 270. Цепь 272 восстановления постоянного тока сдвигает входной сигнал так, что часть сигнала малой величины всегда имеет одно значение, например OV.
Сигнал на линии 270 посылается на первый вход сумматора 274 и также детектору 278 отрицательного пика. Детектор 270 отрицательного пика посылает положительный сигнал на линии 280, представляющий среднее наименьшее значение (например, в пределах истекших 2 мс) входного сигнала. Сигнал на линии 280 посылается на второй вход сумматора 274, таким образом сигнал на линии 270 сдвигается в сторону старших разрядов на величину, которая была ниже 0 В. На линии 282 образуется результирующий сигнал. Причины для применения цепи восстановления постоянного тока те же, которые описаны в одновременно рассматриваемой заявке.
Сигнал из цепи 272 восстановления постоянного тока на линии 282 передается в известный фильтр 284 низких частот, содержащий оптические усилители, резисторы и конденсаторы, причем он выполнен в известной конфигурации с отрицательной обратной связью. Разрушающая частота фильтра 284 равна 1 МГц. Фильтр удаляет нежелательные высокочастотные помехи из сигнала до его передачи в остальную часть схемы на линии 120. Если это потребуется, то можно применять другой фильтр или не фильтр низких частот в зависимости от количества и частоты присутствующих помех. Если это потребуется, то можно применять другие конфигурации для схемы 118 формирования сигналов или любой ее части.
Как показано на фиг. 4, сигнал на линии 120 из схемы 118 формирования сигналов передается на первый вход схемы 128 компаратора. Сигнал эталонного напряжения передается на линии 130 на второй вход схемы 128 компаратора. Величина эталонного сигнала устанавливается на заданном уровне, например, посредством делителя напряжения, выше пола помех дифференцированного, импульсного запертого сигнала на линии 120 и ниже наименьшего пика импульсов, ожидаемых на входном сигнале. Компаратор образует выходной сигнал на линии 132, имеющий либо низшее, например OV, или высшее, например 5V состояние. Когда величина входного сигнала на линии 120 превышает величину эталонного напряжения на линии 130, выходной сигнал из схемы 128 компаратора на линии 132 высокий. Напротив, когда величина входного сигнала меньше величины эталонного сигнала, выходной сигнал из схемы 128 компаратора на линии 132 низкий. Схема 128 компаратора содержит известный компаратор, например М211Н, с положительной обратной связью, добавленной для получения гистерезиса, например, +/- 5 мВ к порогу, установленному эталонным сигналом с тем, чтобы исключить побочные шумы, вызывающий изменение состояния выходного сигнала. Схема 128 компаратора также образует импульсы, имеющие более равномерную амплитуду на выходе, например 5 В, и меньше шумов, чем входной сигнал на линии 120.Если это потребуется, то можно применять другие конфигурации схемы 128 компаратора.
Сигнал из схемы 128 компаратора на линии 132 передается в известный формирователь 134 импульсов, имеющий, например, однотактовый режим.
Формирователь 134 импульсов посылает импульсы на линии 136, которые более "чистые", то есть импульсы более прямоугольные, а их фронты более вертикальные, чем у сигнала из компаратора 128 на линии 132, и они имеют постоянную длительность, например 1 мкс.
Импульсный выходной сигнал из формирователя 134 импульсов передается на линии 136 в известный фильтр 138 низких частот. Фильтр 138 низких частот содержит оптический усилитель, резисторы и конденсаторы в известной схеме с отрицательной обратной связью. Частота пробоя фильтра 138 низких частот равна 0,02 Гц (соответствует постоянной времени,примерно 10 с); однако если это требуется, то можно применять другие частоты. Фильтр 138 низких частот передает сигнал на линии 140, соответствующий среднему значению сигнала на линии, который связан непосредственно с рабочим циклом и,следовательно, со средним количеством импульсов, появляющихся на сигнале обратной связи от лазерного диода (поскольку длительность импульса постоянная). Таким образом фильтр низких частот посылает сигнал пропорционально расстоянию L до поплавка 22 (фиг.1).
Сигнал на линии 140 передается каскаду 142 усиления, который умножает величину сигнала на линии 140 на заданное значение, например CK/2ΔF где K - постоянная пропорциональности, устанавливающая отношение между уровнем постоянного тока на линии 140 и количеством импульсов для передачи сигнала на линии 146, соответствующего расстоянию до поплавка 22, в требуемых единицах, например дюймах. Сигнал на линии 146 передается на отрицательный первый вход сумматора 148, а сигнал напряжения Vd, соответствующий высоте Hd (фиг.1) от нижней части, блока 10 лазерного диода до днища бака 32, передается на второй вход сумматора 148. Сумматор 148 вычитает расстояние L из расстояния Ht и передает результирующий сигнал на линии 16, указывающий высоту жидкости HL от днища бака 32 вблизи трубки 11. Затем высоту HL можно легко перевести в объем, например в галлоны жидкости в баке 32.
Как было описано, для возбуждения блока 10 лазерного диода применяют сигнал с пилообразной формой волны (фиг.7, снимок a) в соответствии с изобретением. Известно, что количество импульсов, появляющихся на сигнале обратной связи (фиг.4, снимок a) на линии 15, пропорционально расстоянию и скорости поплавка 22 (или цели, фиг.1), как описано в упомянутой совместно рассматриваемой заявке. Также известно, что полярность импульсов Fd скорости определяют по направлению, в котором перемещается поплавок 22. Точно, если цель перемещается в сторону лазера, импульсы скорости будут положительными, а если цель перемещается в сторону от лазера, то они будут отрицательными (т.е. полярность определяется по направлению составляющей скорости цели).
Когда поплавок плавает на поверхности жидкости 34 в баке 32, высота HL жидкости колеблется из-за пульсации на поверхности жидкости 34, вызванной движением бака и другими эффектами. Однако колебания высоты жидкости изменяются на равное количество выше и ниже уровня жидкости в устойчивом (спокойное) состоянии. Таким образом импульсы расстояния Fx будут равны в среднем уровню жидкости в устойчивом ее состоянии. Также установлено, что скорость поплавка в обоих направлениях примерно симметричная. Таким образом, количество импульсов скорости Fx для добавления пилообразного сигнала к расстоянию Fx в одном направлении будет равно количеству импульсов скорости F0, вычтенных из величины F0 в другом направлении. Таким образом, в среднем влияние скорости на уровень постоянного тока от фильтра 138 будет составлять нуль (требуемое значение устойчивого состояния).
Известно,
что применение когерентного излучения приводит к появлению на сигнале обратной связи помех в виде пятен, как было описано. Также известно, что размер (диаметр) оптических помех
в виде пятен на рабочей
диафрагме объектива пропорционален диаметру луча, когда он попадает на цель, причем его можно определить по известному уравнению
Ds= λL/Db
(4)
где Ds диаметр оптических помех в виде пятен;
Db диаметр падающего луча;
L расстояние от цели до лазерам;
λ длина волны
падающего луча.
Таким образом, чем меньше диаметр падающего луча, тем больше диаметр пятна. Если диаметр пятна Ds большой, то оптический сигнал обратной связи будет демонстрировать выпадение сигнала при изменении расстояния до цели, то есть будут создаваться большие перепады в интенсивности при определенных расстояниях. Это выпадение сигнала может препятствовать измерению расстояния, поскольку количество излучения между пятнами может быть настолько малым, что оно не будет обнаруживаться компаратором 128. Поскольку помехи в виде пятен связаны с диаметром луча, то применение коллимированного луча создает постоянные помехи в виде пятен, когда цель перемещается (так как диаметр луча постоянный), таким образом создается постоянный пол помех, по которому измеряют импульсы интенсивности на сигнале обратной связи.
Установлено, что применение коллимированного луча вместо сфокусированного луча, который используют Бехейм и др. и Лэнг и др. вместе с отражающей лентой на цели создает постоянные помехи в виде пятен, если цель перемещается, при этом достигается соответствующая интенсивность оптической обратной связи, Таким образом, когда применяют коллимированный луч и "кооперативную" цель (т.е. цель, имеющую индивидуальные свойства отражения),подобную поплавку 22, то можно применять низкочастотное электронное оборудование для возбуждения лазерного диода и анализа сигнала обратной связи. Хотя задающая частота пилообразного сигнала в соответствии с изобретением равна 2 кГц,однако, можно применять другие задающие частоты пилообразного сигнала (ниже или выше), если это потребуется.
Хотя изобретение относится к измерению уровня жидкости, однако его можно использовать в равной степени для измерения расстояния до "кооперативных" отражающих целей, а не для тех, которые плавают на жидкости, при условии, что цель имеет соответствующий коэффициент отражения, а коллимированный луч имеет достаточную мощность для обеспечения необходимой интенсивности оптической обратной связи.
Следует понять, хотя применение сигнала с пилообразной формой волны (фиг. 7, снимок А) и позволяет уменьшить количество электронного оборудования, необходимого для обработки сигнала обратной связи и определения уровня жидкости, однако можно применять другие формы волны, например формы волны с обратным изменением вверх вниз по линейному закону или с изменением вверх с последующим шагом плоской характеристики внизу (как описано в упомянутой, одновременно рассматриваемой заявке), при условии, что помехи в виде пятен уменьшаются при применении коллимированного луча и цели с отражающей лентой или соответствующими свойствами отражения.
Для специалистов в данной области техники должно быть ясно, что существует множество других известных конфигураций схем, которые можно применять для реализации функции обработки сигналов, выполняемой схемой 14 измерения уровня жидкости, т.е. изоляция импульсов и определение количества импульсов за цикл изменения какой-либо величины по линейному закону. Хотя изобретение было описано на примере применений электронных устройств, в качестве технического обеспечения, однако, специалистам в данной области техники должно быть ясно, что изобретение будет действовать также хорошо, если аппаратные схемы 100, 114, 118, 122, 128, 134, 138, 142, 148 реализуются за счет применения компьютера с программным обеспечением и аналого-цифрового преобразователя для преобразования сигнала на линии 112 в цифровые двоичные разряды со скоростью, которая превышает, по крайней мере, в два раза самую большую частоту преобразования, например, достаточна частота 1,5 МГц для аналого-цифрового преобразования 300 импульсов в течение пилообразного сигнала длительностью 5 мс.
Также должно быть ясно, что уровень жидкости HL можно преобразовать в уровень процент или часть по объему жидкости в баке путем известных вычислений с использованием размеров и геометрии бака. Если это осуществляют с применением средств программного обеспечения и используют для транспортного средства, то многие различные геометрии бака можно заранее хранить в памяти и осуществлять поиск на основе марки и модели транспортного средства.
Также вместо применения трубки 11 геометрия бака 32 может иметь зону, которая изолирует жидкость на участке, пригодном для удержания поплавка. Кроме того, если применяют трубку 11, то в баке можно разместить незакрепленные перегородки для дополнительного уменьшения вытеснения жидкости в баке без создания помех для поплавка или процесса измерения. Хотя изобретение было описано на примере применения лазерного диода, однако, оно будет действовать в равной степени хорошо с любым лазером, имеющим оптическую рабочую частоту, которая может изменяться в приемлемых пределах и другие характеристики, совместимые с измерением расстояния (как было описано).
Вместо поплавка можно использовать поверхность жидкости для отражения луча 20, как показано в другом варианте исполнения на фиг.9. Диаметр 31 трубки 11 достаточно мал, чтобы вызвать известный эффект мениска, а поверхность 250 жидкости 34 изогнута вверх (смачивает стороны трубки 11). Эффект мениска зависит от состава материала трубки 11 и типа измеряемой жидкости 34. Изогнутая поверхность 250 жидкости действует в качестве изогнутой (вогнута) отражающей поверхности (из-за отражения по Френелю), от которой отражается луч 20, и образует сфокусированный луч, имеющий фокусное расстояние, равное половине радиуса кривизны поверхности 250. Если расстояние от блока 10 лазера до жидкости значительно больше, чем фокусное расстояние (т.е. радиус кривизны поверхности 250 большой), то возвращающийся луч появляется, как это видно в перспективе блока 10 лазера (фиг.1), как коллимированный луч. Понятно, что эффект мениска и,следовательно, степень кривизны поверхности 250 являются постоянным независимо от уровня жидкости и движения жидкости в баке 32. Таким образом отражательная способность поверхности 250 жидкости будет постоянной. Следует отметить, что хотя возможно некоторое рассеяние падающего измерения, однако, большая часть излучения будет отражаться назад к блоку 10 лазера.
Не совсем плоскую поверхность жидкости нельзя использовать, поскольку существует только одно точное условие жидкости (например, совершенно плоская без ряби поверхность и расположенная точно перпендикулярно к падающему лучу 10), при котором она будет отражать луч 20 непосредственно назад блоку 10 лазера. Таким образом, плоская поверхность жидкости очень чувствительна к движению жидкости внутри бака 32.
Также для специалиста в данной области техники должно быть ясно, что функция обработки сигнала запирание части сигнала обратной связи из блока 10 лазерного диода (фиг.1) будет обеспечивать выполнение намеченной функции (т. е. устранение нежелательных помех, связанных с перерывами в сигнале возбуждения лазера) независимо от типа применяемого лазерного луча (т.е. сфокусированный или коллимированный) и типа применяемой цели (т.е. кооперативная или нет).
Другие патенты, относящиеся к оптическому когерентному измерению расстояния, включают в себя патент США N 4733609 (Гудвин и др.), а другие патенты, связанные с оптическим измерением уровня жидкости, включают в себя патенты США NN 4689489 (Коле) и 4938590 (Ишида).
Хотя изобретение было описано и показано на примере конкретных исполнений, однако, в объеме изобретения возможны указанные и другие различные изменения, исключения и дополнения.
Реферат
Устройство на основе лазерного диода для измерения расстояния включает в себя блок 10 лазерного диода, содержащий лазерный диод и фотодиод, который испускает свет 17 на линзу 19, образующую коллимированный луч 20, падающий на поплавок 22, который покрыт отражающей лентой на его верхней поверхности 24. Луч 20 отражается от поплавка 22 назад к блоку 10 лазерного диода 10, побуждая блок 10 передавать сигнал, имеющий импульсы величины (из-за когерентной интерференции) на линии 15, в схему 14 измерения уровня жидкости 14, соответствующий расстоянию L до поплавка 22. Применение коллимированного луча 20 и отражающей ленты на поплавке 22 позволяет уменьшить помехи в виде пятен, при этом обеспечивается соответствующая обратная связь оптической интенсивности. Блок 10 лазера возбуждается сигналом с пилообразной формой волны, который уменьшает обработку электродными средствами. Схема 14 измерения расстояния запирает сигнал обратной связи во время перерывов в сигнале возбуждения лазерного диода для уменьшения искажения в измерении расстояния из-за помех. Либо поплавок можно исключить и изготовить трубку 11 достаточно небольшого размера для образования кривизны на поверхности 250 жидкости для достижения эффекта мениска, которая образует изогнутую отражающую поверхность для постоянного отражения падающего луча 20 назад к блоку 10 лазера. 2 с. и 10 з.п.ф-лы, 9 ил.
Комментарии