Система для замера жидкости и оборудование для топливного бака - RU2688812C1
Код документа: RU2688812C1
Чертежи



Описание
Настоящее изобретение относится к системе для замера жидкости и оборудования для топливного бака, которое, в частности, подходит для воздушного судна.
Уровень техники
Топливные баки для воздушного судна могут иметь особую форму, что затрудняет или делает невозможным измерение уровня топлива внутри каждого топливного бака с использованием единственного датчика. Это, в частности, применимо к топливным бакам, которые расположены в крыльях воздушного судна. Кроме того, воздушное судно может изменять наклон - также называемый угловым положением воздушного судна - и ускорением, так что результат измерения уровня топлива, который выдан одним датчиком в фиксированном месте в баке, соответствует разным количествам топлива в зависимости от углового положения и ускорения воздушного судна. По этим причинам в топливном баке воздушного судна обычно предусмотрено несколько датчиков.
Более того, в конструкции воздушного судна обычно требуется предусмотреть две цепи измерений, которые не зависят друг от друга и которые измеряют уровень топлива в топливном баке воздушного судна во время дозаправки.
Объединение такого запроса с вопросом измерения уровня топлива в баке сложной формы приводит к наличию в каждом топливном баке воздушного судна значительно количества датчиков, обычно от пятнадцати до восемнадцати. Это увеличивает результирующую стоимость системы для замера топлива, а также ее вес. Тем не менее, общий вес является важным вопросом для воздушного судна, так как он увеличивает потребление топлива.
Кроме того, трудно расположить датчики с подходящими соединениями, когда топливный бак и/или крыло воздушного судна выполнены из композитных материалов. Это также увеличивает заинтересованность в уменьшении количества датчиков.
Например, в документе US 7 843 355 описана система для замера жидкости для снабжения одного топливного бака, при этом указанная система содержит две отдельных подгруппы датчиков, которые расположены в баке, и два отдельных процессора. В режиме дозаправки, каждая подгруппа датчиков приписана одному из процессоров, отдельно от другой подгруппы датчиков и другого процессора, так что каждый процессор может получать информацию об уровне топлива по сигналам измерений, которые выданы датчиками соответствующих подгрупп. Таким образом, независимо и параллельно можно получить два результата для уровня топлива.
Но такая структура системы замера жидкости не оптимизирована для топливного бака воздушного судна, хотя она удовлетворяет запросу в отношении двух цепей измерения и может быть приспособлена для любой формы топливного бака.
С учетом этой ситуации, одна задача настоящего изобретения заключается в том, чтобы предложить новую конструкцию системы для замера жидкости, которая также удовлетворяет требованию о наличии двух цепей измерения и которая может подходить для любой формы топливного бака, но которая требует меньшего количества датчиков.
Другая задача настоящего изобретения заключается в том, чтобы предложить новую конструкцию системы для замера жидкости, которая позволяет уменьшить общий вес.
Раскрытие изобретения
Для решения, по меньшей мере, одной из указанных задач или других задач, в соответствии с первым аспектом настоящего изобретения предложена система для замера жидкости, которая содержит:
- множество датчиков, каждый из которых выполнен с возможностью выработки сигнала измерения, указывающего уровень жидкости, который присутствует у этого датчика, когда множество датчиков установлено в баке для жидкости и когда уровень жидкости находится в диапазоне измерения датчика; и
- по меньшей мере, два вычислительных модуля, при этом каждый вычислительный модуль соединен с возможностью приема сигналов измерений от тех датчиков, которые принадлежат некоторой подгруппе датчиков, которые выделены указанному вычислительному модулю, отдельно от другой подгруппы датчиков, которые выделены другому вычислительному модулю, и каждый вычислительный модуль выполнен с возможностью получения информации об уровне жидкости на основе информации об угловом положении и ускорении бака для жидкости, и, по меньшей мере, одного сигнала измерения, который исходит от датчиков подгруппы, которая выделена указанному вычислительному модулю.
Система для замера жидкости, соответствующая изобретению, дополнительно содержит:
- динамически конфигурируемое множество соединений, которое приспособлено для передачи сигнала измерения, который исходит от любого из датчиков, на любой из вычислительных модулей; и
- по меньшей мере, два модуля управления, которые выполнены с возможностью управления множествами соединений, по меньшей мере, в одном первом режиме работы системы для замера жидкости с целью приписывания одной нефиксированной подгруппы датчиков каждому вычислительному модулю, в зависимости от информации об угловом положении и ускорении бака для жидкости и в зависимости от информации, по меньшей мере, от некоторых датчиков, которая указывает находится ли уровень жидкости у каждого датчика в диапазоне измерения указанного датчика или нет, так что каждая нефиксированная подгруппа датчиков, которая приписана одному из вычислительных модулей, отделена от другой нефиксированной подгруппы, которая приписана другому вычислительному модулю, и содержит, по меньшей мере, один датчик, для которого уровень жидкости у этого датчика находится в его диапазоне измерения.
Таким образом, в первом режиме работы каждый вычислительный модуль использует сигналы измерений только от датчиков, принадлежащих подгруппе, которой в текущий момент приписана указанному вычислительному модулю. Таким образом, оба вычислительных модуля получают соответствующую информацию об уровне жидкости независимо друг от друга и параллельно.
Каждая подгруппа датчиков, которые приписаны одному из вычислительных модулей, может содержать несколько датчиков, но также может содержать один единственный датчик, так как эта подгруппа определяет соответствующий модуль управления.
Таким образом, благодаря изобретению, подгруппа датчиков, которые приписаны одному из вычислительных модулей, может изменяться во времени, когда изменяется, по меньшей мере, или уровень жидкости в баке для жидкости или угловое положение или ускорение бака для жидкости.
Благодаря реализации динамически конфигурируемого множества соединений, обе подгруппы датчиков могут быть определены оптимальным образом на основе углового положения и ускорения бака и на основе датчиков, которые фактически работают в своих диапазонах измерения. Таким образом, нефиксированная оптимизация подгрупп датчиков позволяет сократить общее количество датчиков, которые необходимы в баке для получения двух независимых результатов по уровню жидкости для любого уровня жидкости и углового положения бака. Для этой цели система для замера жидкости может быть выполнена с возможностью, соответственно, хранения, по меньшей мере, одной таблицы соответствия или с возможностью выполнения, по меньшей мере, одной программы для каждого модуля управления, при этом указанная таблица соответствия или программа подходит для выбора нефиксированной подгруппы датчиков, которые приписаны одному из вычислительных модулей в первом режиме работы. Такой выбор подгрупп зависит от информации об угловом положении и ускорении бака для жидкости и от информации, указывающей находится или нет уровень жидкости в каждом датчике в диапазоне измерения этого датчика. Эти элементы информации могут образовывать данные таблицы соответствия или программы.
В возможных вариантах осуществления изобретения модули управления могут быть выполнены с возможностью определения нефиксированных подгрупп датчиков, так что, когда для N датчиков уровень жидкости, существующий у каждого из этих N датчиков, находится в диапазоне измерения датчика, N является целым числом, большим единицы, то один из N датчиков выбирают, по меньшей мере, одним из модулей управления для образования нефиксированной подгруппы, которую приписывают одному из вычислительных модулей, который называют вторичным вычислительным модулем, а все другие датчики из N датчиков выбирают, по меньшей мере, другим модулем управления для образования нефиксированной подгруппы, которая приписана другому вычислительному модулю, которую называют первичным вычислительным модулем. Такие варианты осуществления изобретения объединяют максимальную точность для результата, который получают с помощью первичного вычислительного модуля, с избыточностью результата, которую обеспечивает вторичный вычислительный модуль.
В предпочтительных реализациях системы для замера жидкости, соответствующей изобретению, динамическая работа множества соединений может быть реализована в блоках обработки данных. Для этой цели динамически конфигурируемое множество соединений может содержать множество отдельных Y-образных соединительных устройств и два динамически конфигурируемых модуля. Каждое Y-образное соединительное устройство, соответственно, выделено для одного из датчиков и соединено с целью приема сигнала измерения от этого датчика. И далее выполнено с возможностью передачи этого сигнала измерения на оба динамически конфигурируемых модуля. Кроме того, каждый динамически конфигурируемый модуль, один из модулей управления и один из вычислительных модулей могут быть частями одного блока обработки данных, отличного от другого блока обработки данных, который содержит другой модуль управления, другой динамически конфигурируемый модуль и другой вычислительный модуль. Далее, в каждом блоке обработки данных динамически конфигурируемый модуль выполнен с возможностью приема сигналов измерений от Y-образных соединительных устройств и с возможностью передачи или отсутствия передачи каждого из этих сигналов измерений на вычислительный модуль блока обработки данных, чем управляет модуль управления.
В соответствии с некоторым развитием изобретения, модули управления также могут быть выполнены с возможностью управления множеством соединений, по меньшей мере, во втором режиме работы системы для замера жидкости с целью параллельной передачи на оба вычислительных модуля сигнала измерения, который исходит, по меньшей мере, из того же датчика, при условии, что уровень жидкости для этого датчика находится в его диапазоне измерения. Далее, каждый вычислительный модуль получает соответствующую информацию об уровне жидкости отдельно от другого вычислительного модуля, на основе, по меньшей мере, указанного сигнала измерения, который совместно используют оба вычислительных модуля. Такой второй режим работы позволяет каждому вычислительному модулю работать с большим количеством датчиков, тем самым вырабатывать свою информацию об уровне жидкости с улучшенной точностью и улучшенной устойчивостью к неисправностям. Одновременно оба вычислительных модуля обеспечивают избыточность для использования сигналов измерений.
В соответствии со вторым аспектом настоящего изобретения предложено оборудование для топливного бака автомобиля, корабля, воздушного судна или космического корабля, который содержит, по меньшей мере, один бак для жидкости, выполненный с возможностью размещения топлива, находящегося в жидкой фазе, и систему для замера жидкости, которая соответствует первому аспекту изобретения. Далее в топливном баке установлены датчики указанной системы замера жидкости.
Когда оборудование для топливного бака приспособлено для воздушного судна и когда оно может обеспечить второй режим работы, как описано выше, первый режим работы системы для замера жидкости может представлять собой режим двойного контроля, который, в частности, подходит для периода дозаправки, и второй режим работы системы для замера жидкости может представлять собой режим полной точности с улучшенной устойчивостью к неисправностям для всех возможных угловых положений, в частности, для периода полета.
В предпочтительных реализациях изобретения, в системе для замера жидкости могут быть использованы элементы изоляции и/или подходящие устройства с целью предотвращения распространения в системе неисправностей при работе и с целью обеспечения корректной работы при возможных неисправностях некоторых компонентов системы.
В частности, когда множество соединений содержит несколько отдельных соединительных устройств, каждое из которых выполнено с возможностью передачи или отсутствия передачи сигнала измерения, который исходит от одного из датчиков, по меньшей мере, на один из вычислительных модулей, то каждое соединительное устройство может быть снабжено, по меньшей мере, одним элементом сигнальной изоляции, который расположен на сигнальном выходе указанного соединительного устройства. Благодаря таким элементам сигнальной изоляции, при возникновении неисправности в одном из соединительных устройств, каждый вычислительный модуль может по-прежнему работать на основе сигналов измерений, которые передают, по меньшей мере, другое соединительное устройство, которое остается рабочим.
Кроме того, каждое соединительное устройство может быть снабжено элементом изоляции питания, который расположен у входа питания соединительного устройства, так что в случае неисправности одного отдельного устройства соединения, электроэнергия по-прежнему может подаваться на другие соединительные устройства.
Также по причинам избыточности и безопасности, система для замера жидкости может дополнительно содержать:
- два блока подачи электроэнергии, каждый из которых способен подавать электрическую энергию на множество соединений и также возможно на любой из датчиков; и
- устройство подачи питания, которое соединено с целью передачи электрической энергии от любого блока подачи электроэнергии на множество соединений, так что множество соединений может получать электрическую энергию в ходе отдельных периодов работы или от одного из блоков подачи электроэнергии за раз или одновременно от обоих блоков подачи электроэнергии.
Таким образом, для работы системы для замера жидкости, электрическую энергию, необходимую для передачи сигналов измерений на вычислительные модули, может подавать только один из блоков подачи электроэнергии или ее могут подавать параллельно оба блока подачи электроэнергии, в зависимости от мгновенной электрической энергии, доступной в каждом блоке подачи электроэнергии, или в зависимости от признаков обоих блоков подачи электроэнергии.
Эти и другие признаки изобретения далее будут описаны со ссылками на приложенные фиг., которые касаются предпочтительных вариантов осуществления изобретения, но которые не ограничивают изобретение.
Краткое описание чертежей
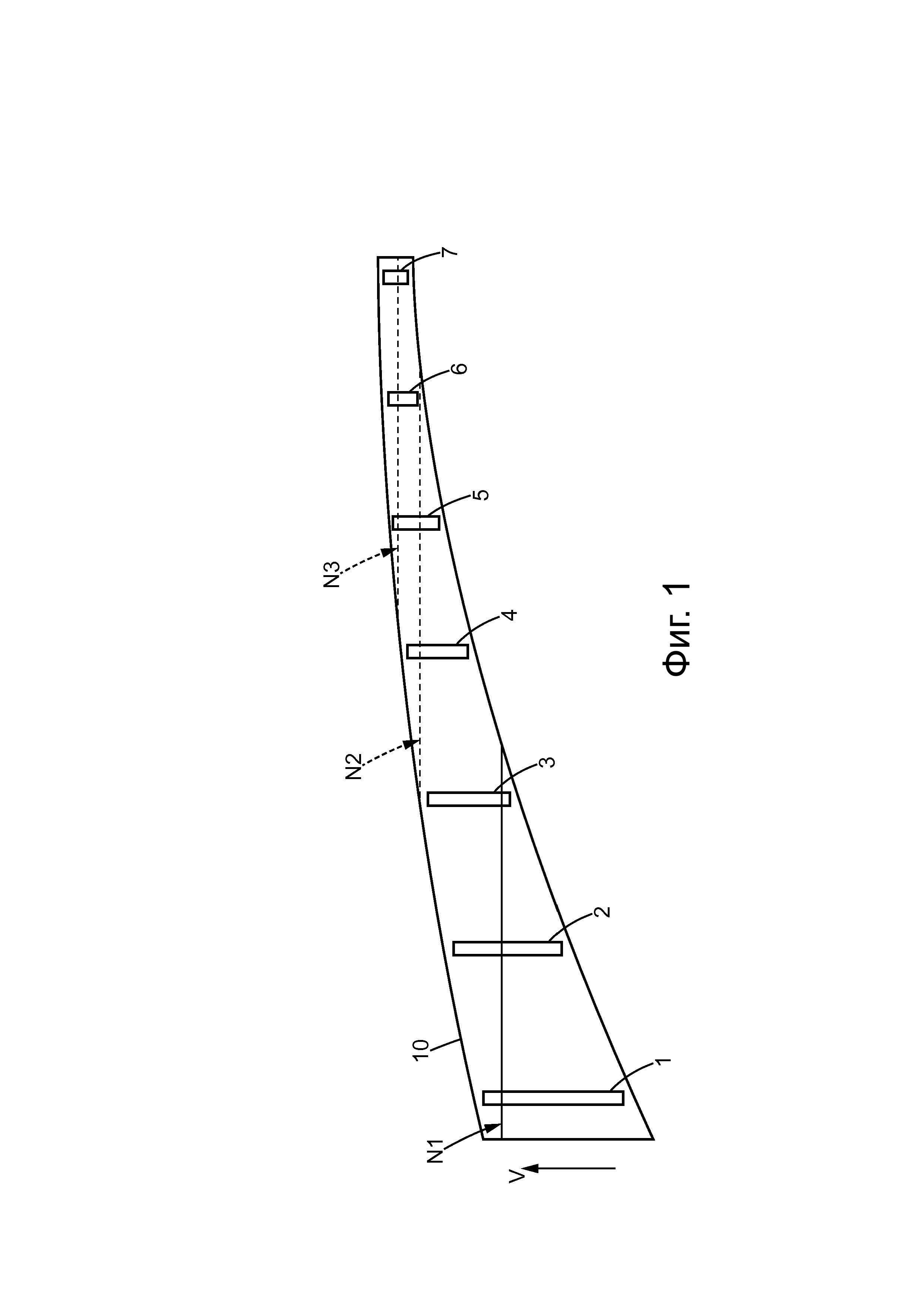
Фиг. 1 - вид, показывающий сечение топливного бака воздушного судна;
фиг. 2 - вид, показывающий структурную схему системы для замера жидкости, соответствующей настоящему изобретению;
фиг. 3 - вид, показывающий альтернативную компоновку системы для замера жидкости, соответствующей настоящему изобретению; и
фиг. 4 - вид, соответствующий фиг. 2 и 3 и показывающий предпочтительный вариант осуществления настоящего изобретения.
Для ясности размеры элементов, которые показаны на этих фиг., не соответствуют фактическим размерам или отношениям размеров. Также одинаковые ссылочные позиции, которые содержатся на разных фиг., обозначают идентичные элементы или элементы с идентичными функциями.
Подробное описание изобретения
Для иллюстрации, а не для ограничения, далее будет описано изобретение, когда оно применяется к воздушному судну, например, предназначенному для транспортировки пассажиров. Ниже перечислены используемые на фиг. 1 и 2 ссылочные позиции и их значения.
10 - топливный бак, например топливный бак, который расположен в крыле воздушного судна;
N1, N2, N3 - три уровня топлива, которые возможны в топливном баке;
V - вертикальное направление;
1 - 7 - датчики для измерения уровня топлива в топливном баке;
11A, 11В - первая и вторая подгруппа соединений соответственно;
110A - соединительные устройства первой подгруппы соединений;
110В - соединительные устройства второй подгруппы соединений;
111А - элемент сигнальной изоляции для каждого соединительного устройства первой подгруппы соединений;
111В - элемент сигнальной изоляции для каждого соединительного устройства второй подгруппы соединений;
112А - элемент изоляции питания для каждого соединительного устройства первой подгруппы соединений;
112В - элемент изоляции питания для каждого соединительного устройства второй подгруппы соединений
20A, 20В - первый и второй блоки обработки данных, обозначенные CPU_A и CPU_B соответственно;
21A, 21В - первый и второй регистры, обозначенные А и В соответственно;
22A, 22В - первый и второй модули управления, обозначенные УПР_A и УПР_B соответственно;
23A, 23В - первый и второй вычислительные модули, обозначенные ВЫЧ_A и ВЫЧ_B соответственно;
12 - система отображения информации, содержащая дисплей в кабине и внешний дисплей;
13 - система измерения тангажа, крена и ускорения для воздушного судна;
14A, 14В - первый и второй блоки подачи электроэнергии, обозначенные А и В соответственно;
15 - устройство подачи питания.
В практических реализациях изобретения регистр 21А, модуль 22А управления и вычислительный модуль 23А могут быть частями блока 20A обработки данных. Аналогичная конструкция может быть использована для регистра 21В, модуля 22В управления и вычислительного модуля 23В, которые находятся в другом блоке 20В обработки данных.
Топливный бак 10 может иметь любую общую форму, в зависимости от его встраивания в воздушное судно. Представленная форма бака подходит для встраивания в крыло воздушного судна. Бак 10 может быть тоньше и выше в вертикальном направлении V на внешней стороне бака крыла (справа на фиг. 1) по сравнению с противоположной внутренней стороной бака крыла (левая сторона на фиг. 1). Топливо в жидкой фазе находится в баке 10.
Датчики 1-7 закреплены в баке 10 в соответствующих местах. Каждый их них может быть датчиком любого типа, подходящего для независимого измерения мгновенного уровня топлива в месте расположения этого датчика. Например, каждый датчик может содержать электрический конденсатор цилиндрической конструкции. Далее каждое измерение уровня топлива, которое осуществляется любым из датчиков, получают на основе значения емкости этого датчика, которое является функцией уровня топлива. Такой тип датчика и его работа хорошо известны в технике, так что снова их объяснять не нужно.
Работа такого датчика ограничена диапазоном измерения уровня топлива. Такой диапазон измерения может быть ограничен типом самого датчика, в частности, длиной датчика, а также общей формой топливного бака 10. В примере, показанном на фиг. 1, датчики 1-3 эффективно измеряют уровень топлива, при этом первый из этих датчиков расположен рядом с уровнем, обозначенным N1. Но эти датчики 1-3 больше не эффективны для уровня топлива рядом с уровнем, обозначенным N2, а датчики 4 и 5 - эффективны. Аналогично, датчики 5-7 эффективно измеряют уровень топлива, когда он близок к уровню, который обозначен N3. Очевидно, что соответствующие диапазоны измерения датчиков также зависят от углового положения воздушного судна, а именно возможных ненулевых значений тангажа и/или крена и также зависят от ускорения воздушного судна, так как наклон и форма поверхности жидкости в баке 10 изменяются в зависимости от мгновенных значений указанных параметров.
Количество датчиков может быть любым и каждый датчик передает сигналы измерений одновременно на модули 22А и 22В управления. Угловое положение воздушного судна и ускорение измеряют с помощью тангажа, крена и ускорения системы 13 измерения. Предпочтительно, чтобы два множества данных, каждое из которых содержит значения тангажа, крена и ускорения, могли быть получены параллельно из различных источников, таких как отдельные блоки измерения, и каждое множество данных передают на один из модулей 22А, 22В управления, при этом другое множество данных независимо передают на другой модуль управления. На основе значений тангажа, крена и ускорения, и сигналов измерений, принятых от датчиков, каждый модуль 22А, 22В управления определяет и выбирает среди датчиков, которые в текущие моменты работают в своих соответствующих диапазонах измерения. Другие датчики считаются не полезными в текущий момент. Возможно, сигналы измерений, которые выработаны датчиками, для которых уровень топлива находится вне диапазонов измерений этих датчиков, могут указывать на то, что эти датчики находятся за пределами рабочего диапазона, например с использованием заданных максимального и минимального значений сигналов.
Для обеспечения избыточности при определении уровня топлива, воздушное судно имеет два параллельных канала, каждый из которых способен независимо от другого определять уровень топлива. Эти каналы обозначены на фиг. 2 как КАНАЛ_A и КАНАЛ_B. КАНАЛ_A может содержать первую подгруппу 11A соединений, модуль 22А управления, вычислительный модуль 23А, регистр 21А и возможно первый источник множества данных тангажа, крена и ускорения. Аналогично, КАНАЛ_В может содержать вторую подгруппу 11В соединений, модуль 22В управления, вычислительный модуль 23В, регистр 21А и возможно второй источник множества данных тангажа, крена и ускорения. Соединительные устройства 110А и 110В, относящиеся соответственно к подгруппам 11A и 11В соединений, вместе образуют множество соединений, описанное в общей части этого описания.
В соответствии с изобретением каждый из датчиков не приписан на постоянной основе к одному из каналов КАНАЛ_А и КАНАЛ_В, а распределение датчиков между каналами изменяется в отдельных временных периодах, в зависимости, в частности, от фактического уровня топлива, а также тангажа, крена и ускорения воздушного судна. Такое распределение определяют модули 22А и 22В управления и его реализуют с помощью надлежащих команд, которые выдают указанные модули 22А и 22В управления и которые передают на соединительные устройства 110А и 110В.
В первом возможном варианте осуществления изобретения, который соответствует фиг. 2, каждое соединительное устройство 110А в первой подгруппе 11A соединений является устройством с двумя состояниями, которое способно или передать сигнал измерения, который был принят на сигнальном входе указанного соединительного устройства, на вычислительный модуль 23А, или не передавать никакого сигнала. Отдельное соединительное устройство 110А предусмотрено независимо для каждого из датчиков 1-7. Каждое соединительное устройство 110В во второй подгруппе 11В соединений также отдельно выделено для передачи сигнала измерения от одного из датчиков 1-7, приписанных указанному соединительному устройству, на вычислительный модуль 23В. Подгруппы 11A и 11В соединений могут иметь аналогичную структуру и отдельное соединительное устройство 110А, 110В выделено для каждого датчика в каждой подгруппе 11А и 11В. Таким образом, сигналы измерений, которые выдают любой из датчиков 1-7, могут быть перенаправлены на любой из вычислительных модулей 23А и 23В или на оба указанных модуля, в зависимости от команд, которые выдают модули 22А и 22В управления, на все соединительные устройства 110А и 110В. В общем, теми соединительными устройствами 110А и 110В, которые выделены датчикам, которые в текущий момент находятся за пределами рабочего диапазона, могут управлять так, чтобы они были в состоянии отсутствия передачи.
Далее, в первом режиме работы, которым управляют модули 22А и 22В управления и который соответствует режиму дозаправки, датчики, для которых уровень топлива находится в их соответствующих диапазонах измерения, распределяют по двум отдельным подгруппам. Модуль 22А управления приписывает первую подгруппу датчиков КАНАЛУ_А путем такого управления теми соединительными устройствами 110А, которые выделены указанным датчикам, чтобы они находились в состоянии передачи сигналов. Одновременно теми соединительными устройствами 110А, которые не соответствуют датчикам первой подгруппе датчиков, управляют так, чтобы они были в состоянии отсутствия передачи. Модуль 22В управления приписывает вторую подгруппу датчиков КАНАЛУ_В путем такого управления соединительными устройствами 110В, которые выделены указанным другим датчикам, чтобы они находились в состоянии передачи сигналов. Также соединительными устройствами 110В, которые не соответствуют датчикам, относящимся ко второй подгруппе датчиков, управляют так, чтобы они были в состоянии отсутствия передачи. Таким образом, уровень топлива может быть определен независимо КАНАЛОМ_А с использованием первой подгруппы датчиков, с одной стороны, и КАНАЛОМ_В с использованием второй подгруппы датчиков, с другой стороны. Модули 22А и 22В управления определяют, соответственно, первая и вторая подгруппы датчиков на основе, по меньшей мере, одного из сигналов измерений, выданных датчиками, которые в текущий момент работают в их диапазонах измерения, и значений тангажа, крена и ускорения. Это может быть достигнуто с помощью модуля 22А управления с использованием таблицы соответствия, которая хранится в регистре 21А, с использованием сигналов измерений и значений тангажа, крена и ускорения как входных данных для указанной таблицы соответствия. В качестве альтернативы таблице соответствия для той же цели может быть использована некоторая программа. Чтобы модуль 22А управления определил подгруппу датчиков, сигналы измерений могут быть использованы только для указания, является ли каждый датчик фактически действующим или он находится за пределами рабочего диапазона. Далее, каждый вычислительный модуль использует точную величину сигналов измерений для получения результата по уровню топлива, который также называется информацией об уровне топлива. Аналогичная работа делается модулем 22В управления с использованием таблицы соответствия, хранящейся в регистре 21В, для определения подгруппы датчиков, которые приписаны КАНАЛУ_В. Для режима дозаправки обе таблицы соответствия или эквивалентные программы приспособлены для образования подгрупп датчиков, которые дополняют друг друга в плане датчиков, в текущий момент работающих в своих соответствующих диапазонах измерения.
Например, когда уровень топлива равен N1 для топливного бака с фиг. 1, первая подгруппа датчиков, приписанная вычислительному модулю 23А или КАНАЛУ_А, может состоять из датчиков 2 и 3, а вторая подгруппа, приписанная вычислительному модулю 23В или КАНАЛУ_В, может состоять из одного датчика 1. Когда уровень топлива равен N2, первая подгруппа датчиков для КАНАЛА_А, может состоять только из датчика 5, а вторая подгруппа для КАНАЛА_В, может состоять только из датчика 4. И когда уровень топлива равен N3, первая подгруппа датчиков для КАНАЛА_А, может состоять из датчиков 6 и 7, а вторая подгруппа для КАНАЛА_В, может состоять только из датчика 5.
Следовательно, в этом первом режиме работы вычислительный модуль 23А получает первый результат по уровню топлива, и вычислительный модуль 23В получает второй результат для того же уровня топлива. Каждый результат вычисляют и передают отдельно на систему 12 отображения информации. Таким образом, каждый результат может быть показан или на внешнем дисплее, который предназначен для оператора дозаправки, или на дисплее в кабине, или как на внешнем дисплее, так и на дисплее в кабине. При общей корректной работе первый и второй результаты по уровню топлива должны согласовываться, хотя они были получены с помощью полностью независимых подгрупп датчиков и каналов обработки.
Во втором режиме работы, которым управляют модули 22А и 22В управления и который соответствует режиму работы в полете, датчики, для которых уровень топлива находится в соответствующих диапазонах измерения, одновременно приписывают обоим каналам: КАНАЛУ_А и КАНАЛУ_В. Таким образом, результаты по уровню топлива, полученные каждым из вычислительных модулей 23А, 23В, обладают максимальной точностью. Эти результаты из обоих каналов направляют независимо в систему 12 отображения информации.
Блок 14А подачи электроэнергии подает питание на блок 20А обработки данных, включающий модуль 22А управления и вычислительный модуль 23А. Аналогично, блок 14В подачи электроэнергии подает питание на блок 20В обработки данных, включающий модуль 22В управления и вычислительный модуль 23В. Но предпочтительно, чтобы устройство 15 подачи питания подавало питание на все соединительные устройства 110А и 110В. Возможно, каждый датчик для измерения уровня топлива в топливном баке 10 может питаться через соединительное устройство, которое передает свои сигналы измерений на надлежащий вычислительный модуль (модули), в зависимости от режима работы системы и подгрупп датчиков. Устройство 15 подачи питания может быть выполнено с возможностью передачи на соединительные устройства 110А и 110В электрической энергии, подаваемой из любого из блоков 14А и 14В подачи электроэнергии или подаваемой одновременно из обоих блоков подачи электроэнергии. В частности, когда один из блоков 14А и 14В подачи электроэнергии неисправен, например, его выходное напряжение слишком мало, то устройство 15 подачи питания передает электрическую энергию, которую вырабатывает один из надлежащим образом работающих блоков 14А и 14В подачи электроэнергии или оба блока подачи электроэнергии, чтобы достичь необходимого для соединительных устройств количества электрической энергии. Таким образом, передача сигналов измерений не изменяется в зависимости от режима работы.
Описанные улучшения касаются обеспечения безопасности работы при неисправности одного из соединительных устройств 110А или 110В. Предполагается, что это позволит системе для замера жидкости снова работать в любом режиме работы, но на основе только других соединительных устройств, которые по-прежнему работают нормально.
Во-первых, каждое соединительное устройство 110А, 110В может быть снабжено на входе питания элементом 112А, 112В изоляции питания соответственно. Этот элемент изоляции питания обеспечивает то, что неисправность в любом из соединительных устройств 110А и 110В, такая как короткое замыкание, не будет распространяться вдоль сети подачи электрической энергии соответствующего канала. Задача элемента 112А, 112В изоляции питания при возникновении такой неисправности заключается в отсоединении или электрической изоляции соединительного устройства 110А, 110В, которое содержит неисправность, от сети подачи электрической энергии. Такой элемент 112А, 112В изоляции питания может быть основан на плавкой вставке или любой схеме разъединения электрического соединения, которая расположена на входе питания каждого соединительного устройства 110А, 110В.
Во-вторых, каждое соединительное устройство 110А, 110В может быть снабжено на сигнальном выходе элементом 111А, 111В сигнальной изоляции соответственно. Этот элемент сигнальной изоляции обеспечивает то, что неисправность в любом из соединительных устройств 110А и 110В не будет распространяться до вычислительного модуля 23А, 23В соответствующего канала. Задача элемента 111А, 111В сигнальной изоляции при возникновении такой неисправности заключается в изоляции соединительного устройства 110А, 110В, которое содержит неисправность, от вычислительного модуля 23А, 23В в зависимости от канала. Такой элемент 111А, 111В сигнальной изоляции может быть основан на резисторах или любой электронной схеме, которая расположена на сигнальном выходе каждого соединительного устройства 110А, 110В.
На фиг. 3 показан возможный альтернативный вариант осуществления системы для замера жидкости, также в соответствии с настоящим изобретением, но с другим расположением компонентов. В основном оба соединительных устройства 110А и 110В, которым был выделен на фиг. 2 один и тот же датчик из датчиков 1-7 уровня топлива, но были соединены отдельно и соответственно с вычислительными модулями 23А и 23В, объединены в одно соединительное устройство с двойным соединением, которое называется соединительным устройством с двойным соединением. Таким образом, для каждого датчика предусмотрено одно отдельное соединительное устройство 110 с двойным соединением. Таким образом, все соединительные устройства 110 с двойным соединением образуют одно множество соединений, обозначенное 11. Модули 22А и 22В управления управляют каждым из соединительных устройств 110 с двойным соединением, так что сигналы измерений, которые выданы соответствующим датчиком, передают или только на вычислительный модуль 23А или только на вычислительный модуль 23В или на оба модуля, в зависимости от режима работы. Первый и второй режимы работы, описанные ранее со ссылками на фиг. 1 и 2, применимы в рассматриваемом случае, в частности для подгрупп датчиков, приписанных каждому вычислительному модулю 23А, 23В для первого режима работы.
Вход питания каждого соединительного устройства 110 с двойным соединением также может быть снабжен элементом изоляции питания, который в рассматриваемом случае обозначен 112, и оба сигнальных выхода соединительного устройства 110 с двойным соединением, соединенные соответственно с вычислительными модулями 23А и 23В, могут быть снабжены элементами 111А и 111В сигнальной изоляции.
На фиг. 4 показан другой вариант осуществления системы для замера жидкости, которая также соответствует настоящему изобретению и в которой переменная передача сигналов измерений, которые выданы датчиками 1-7, реализована в блоках 20А и 20В обработки данных. С учетом варианта осуществления изобретения с фиг. 3, каждое соединительное устройство 110 с двойным соединением заменено Y-образным соединительным устройством 110’ с одним сигнальным входом и двумя сигнальными выходами. Каждое Y-образное соединительное устройство 110’ соединено у входа с одним из датчиков 1-7 с целью приема сигналов измерений только от этого датчика. Оба сигнальных выхода каждого Y-образного соединительного устройства 110’ соединены соответственно с блоками 20А и 20В обработки данных. Каждое Y-образное соединительное устройство 110’ является пассивным, так что оно одновременно передает каждый сигнал измерения на оба блока 20А и 20В обработки данных. Все Y-образные соединительные устройства 110’ образуют множество соединений, которое на фиг. 4 обозначено как 11’. Также они могут быть снабжены элементами 111А, 111В сигнальной изоляции и элементами 112 изоляции питания.
В варианте осуществления изобретения на фиг. 4 каждый блок 20А (соответственно 20В) обработки данных дополнительно содержит динамически конфигурируемый модуль 110А’ (соответственно 110В’), который функционально занимает промежуточное положение между модулем 22А (соответственно 22В) управления и вычислительным модулем 23А (соответственно 23В). Динамически конфигурируемые модули 110А’ и 110В’ обозначены на фиг. 4 как ВЫБОР_А и ВЫБОР_В и они могут быть программными. Каждый из них принимает все сигналы измерений от датчиков 1-7 и каждый из них передает выбранные сигналы из этих сигналов измерений под управлением модулей 22А и 22В управления. Работа модулей 22А и 22В управления и вычислительных модулей 23А, 23В может быть идентична работе аналогичных модулей из варианта осуществления изобретения на фиг. 3, но фактическая реализация выбора датчиков как определяемая модулями 22А и 22В управления в рассматриваемом случае осуществляется динамически конфигурируемыми модулями 110A’, 110B’ в блоках 20А, 20В обработки данных.
Ясно, что изобретение может быть осуществлено при изменении вторичных аспектов, при этом будут сохранены основные достоинства. В основном, в режиме дозаправки изобретение обеспечивает динамически конфигурируемые подгруппы датчиков, подходящие для получения двух результатов по уровню топлива, независимо друг от друга. Основное достоинство заключается в сокращении общего количества датчиков уровня топлива, которые необходимы для получения двух независимых результатов при любом уровне топлива, тангаже, крене и ускорении воздушного судна. Обычно изобретение может позволить сократить количество датчиков примерно на 15%, при одновременном обеспечении информации об уровне топлива с аналогичной точностью и независимостью для одного и того же топливного бака.
Реферат
Изобретение относится к системе для замера жидкости и оборудования для топливного бака, которое, в частности, подходит для воздушного судна, космического корабля или автомобиля. Система для замера жидкости содержит множество датчиков уровня топлива и два вычислительных модуля, выполненных с возможностью определения информации об уровне жидкости на основе сигналов измерений, которые исходят от датчиков. В режиме дозаправки датчики распределены на две динамически конфигурируемые подгруппы, которые отделены друг от друга и приписаны соответственно вычислительным модулям для получения независимо друг от друга двух результатов по уровню топлива. Техническим результатом является уменьшение общего веса системы для замера жидкости, необходимой для получения надежных результатов, при любом уровне топлива, а также угловом положении и ускорении воздушного судна. 2 н. и 8 з.п. ф-лы, 4 ил.
Комментарии