Способ и устройство для подтверждения периферийного устройства в системе управления - RU2651619C2
Код документа: RU2651619C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится, в целом, к системам управления и, более конкретно, к способу и устройству для подтверждения работоспособности и возможности использования периферийного устройства в системе управления.
УРОВЕНЬ ТЕХНИКИ
[0002] Системы управления, которые содержат системы управления процессом и приборные системы безопасности (SIS), как правило, содержат один или больше регуляторов для управления процессом или системой обеспечения безопасности. Регуляторы в данных системах часто используют периферийные устройства для выполнения разнообразных функций в среде управления. Например, в системе регулирования уровня жидкости периферийные устройства могут использоваться для контроля и/или регулирования количества жидкости в накопительной емкости. Когда уровень жидкости достигает заранее заданного уровня (высокого или низкого), система управления может реагировать путем использования одного из периферийных устройств, таких как клапан, для регулирования потока жидкости, поступающей в накопительную емкость или выходящей из него.
[0003] Соответствующее обслуживание системы управления процессом или SIS технологической установки может включать контроль действия периферийных устройств, испытания периферийных устройств и ремонт или замену периферийных устройств. Важным вопросом управления персоналом, координирующим систему управления, является знание того, являются ли периферийные устройства доступными для использования и работоспособными. В системе регулирования уровня, реализующей приложение обнаружения высокого уровня, периферийное устройство обычно считается действующим в «сухом» состоянии или условиях, поскольку периферийное устройство не выключается или не приводится в действие, пока уровень жидкости не возрастет до достижения планируемой отметки или предела высокого уровня. Периферийное устройство может, таким образом, оказываться бездействующим или неизменным в течение промежутка времени, когда уровень жидкости остается ниже планируемого высокого уровня. Если закрепленная подвижно часть периферийного устройства является неизменной или бездействующей в течение длительного периода времени, существует опасение, что периферийное устройство не будет функционировать или может иным способом удерживаться от надлежащего действия, когда жидкость достигает планируемого высокого уровня. Поэтому управляющий персонал может предпочесть периодически подтверждать, что периферийное устройство обнаружения уровня является работоспособным и доступным для использования.
[0004] Обычно используемые методы подтверждения работоспособности и/или возможности использования периферийного устройства обнаружения уровня, как правило, требуют, чтобы управляющий персонал посещал место расположения системы управления для копирования возрастания или падения уровня жидкости или имитации обнаружения уровня с помощью периферийного устройства. Один известный метод подтверждения включает изменение уровня жидкости для включения или выключения периферийного устройства обнаружения уровня и подтверждения того, что периферийное устройство работоспособно. Однако изменение уровня жидкости может потребовать длительного времени для подъема или опускания жидкости до заданного уровня, чтобы периферийное устройство могло быть выключено. Другой известный способ подтверждения требует, чтобы управляющий персонал вручную управлял периферийным устройством для имитации выключения периферийного устройства. Однако в некоторых регуляторах уровня, таких как электронные устройства, которые не являются механическими по характеру, управление вручную периферийным устройством может оказаться невозможным.
КРАТКОЕ ОПИСАНИЕ
[0005] В настоящем документе описаны примеры систем и способов для подтверждения возможности использования и/или работоспособности периферийного устройства в станции управления. В соответствии с первым аспектом варианта осуществления системы управления для регулирования процесса система управления содержит периферийное устройство, связанное с процессом и расположенное таким образом, чтобы управлять условиями процесса. Датчик связан с процессом и расположен таким образом, чтобы контролировать процесс на предмет возникновения триггера события, связанного с условиями процесса. Регулятор содержит процессор для управления периферийным устройством, и регулятор функционально связан с периферийным устройством. Запоминающее устройство связано с регулятором, и диагностический модуль сохраняется в запоминающем устройстве и связан с процессором. Диагностический модуль может быть выполнен в процессоре для перемещения периферийного устройства и имитации возникновения триггера события.
[0006] В соответствии со вторым аспектом варианта осуществления система управления, имеющая накопительную емкость для одной или больше жидкостей, содержит поплавок, реагирующий на жидкость в накопительной емкости. Приводной механизм функционально связан с поплавком, а процессор связан с приводным механизмом и способен перемещать поплавок. Датчик содержит вход и выход, причем вход датчика функционально связан с поплавком для приема входного сигнала, представляющего характеристику поплавка или рабочей среды, а выход датчика функционально связан с регулятором для создания выходного сигнала, связанного с входным сигналом. Устройство вывода и запоминающее устройство связаны с процессором. В запоминающем устройстве сохраняется приводящий в действие модуль, который, будучи выполняемым в процессоре, включает приводной механизм, а в запоминающем устройстве сохраняется демонстрирующий модуль, который, будучи выполняемым в процессоре, демонстрирует выходной сигнал датчика на устройстве вывода.
[0007] В соответствии с третьим аспектом варианта осуществления система регулирования уровня содержит подвижный узел, содержащий стержень, имеющий ближний конец и дальний конец. Поплавок прикреплен к дальнему концу стержня, а приводной механизм функционально связан с подвижным узлом. Процессор связан с приводным механизмом и способен перемещать поплавок с помощью подвижного узла. Датчик содержит вход и выход, причем вход датчика функционально связан с подвижным узлом для приема входного сигнала, представляющего одну или больше характеристик поплавка или рабочей среды, а выход датчика функционально связан с процессором для создания выходного сигнала, связанного с входным сигналом. Устройство вывода и запоминающее устройство связаны с процессором. В запоминающем устройстве сохраняется приводящий в действие модуль, который, будучи выполняемым в процессоре, включает приводной механизм, а в запоминающем устройстве сохраняется демонстрирующий модуль, который, будучи выполняемым в процессоре, демонстрирует выходной сигнал датчика на устройстве вывода.
[0008] В соответствии с четвертым аспектом варианта осуществления способ предназначен для подтверждения системы регулирования уровня, снабженной регулятором, связанным с приводным механизмом и подвижным узлом, поплавком, связанным с подвижным узлом, и датчиком для измерения физической величины, представляющей характеристику поплавка или рабочей среды поплавка, который присоединен между подвижным узлом и регулятором. Способ включает в себя приведение в действие приводного механизма для перемещения подвижного узла и приема входного сигнала, представляющего характеристику поплавка или рабочей среды поплавка. Способ включает в себя прием выходного сигнала от датчика, связанного с подвижным узлом, и демонстрацию состояния поплавка.
[0009] В дальнейшем, в соответствии с одним или больше из вышеуказанных первого, второго третьего или четвертого аспектов, система и/или способ управления может дополнительно включать в себя один или больше следующих предпочтительных видов.
[0010] В одном предпочтительном виде выходной сигнал датчика включает в себя дискретную величину, представляющую характеристику поплавка или рабочей среды. Дискретная величина может указывать первое состояние, соответствующее поплавку, установленному ниже заранее заданного уровня, или второе состояние, соответствующее поплавку, установленному на заранее заданном уровне или выше него.
[0011] В другом предпочтительном виде выходной сигнал датчика включает в себя значение (параметра) в непрерывном режиме работы, представляющее характеристику поплавка или рабочей среды.
[0012] В другом предпочтительном виде анализирующий модуль и по меньшей мере один предшествующий выходной сигнал датчика сохраняются в запоминающем устройстве. Анализирующий модуль, который, будучи выполняемым в процессоре, сравнивает выходной сигнал датчика по меньшей мере с одним предшествующим выходным сигналом датчика.
[0013] В другом предпочтительном виде датчик содержит вход и выход, причем вход датчика функционально связан с периферийным устройством для приема входного сигнала, представляющего характеристику периферийного устройства или рабочей среды, а выход датчика функционально связан с регулятором для создания выходного сигнала, связанного с входным сигналом.
[0014] В другом предпочтительном виде система управления содержит подвижный узел, содержащий стержень, поплавок, прикрепленный к дальнему концу стержня, и приводной механизм, связанный с процессором, который способен перемещать поплавок с помощью подвижного узла.
[0015] В другом предпочтительном виде система управления содержит приводящий в действие модуль, сохраненный в запоминающем устройстве, который, будучи выполняемым в процессоре, приводит в действие приводной механизм.
[0016] В другом предпочтительном виде система управления содержит устройство вывода, связанное с регулятором и/или процессором, и сохраненный в запоминающем устройстве демонстрирующий модуль, который будучи выполняемым в процессоре, демонстрирует выходной сигнал на устройстве вывода.
[0017] В еще одном предпочтительном виде характеристика поплавка или рабочей среды включает в себя по меньшей мере, один из следующих параметров: положение уровня поплавка, вес поплавка, массу поплавка, плотность жидкости, выталкивающую силу жидкости и вязкость жидкости.
[0018] В еще одном предпочтительном виде выходной сигнал датчика демонстрируется визуальными и/или звуковыми средствами на устройстве вывода.
[0019] В еще одном предпочтительном виде приводной механизм содержит соленоид.
[0020] В еще одном предпочтительном виде датчик содержит переключатель и/или датчик на эффекте Холла.
[0021] В еще одном предпочтительном виде к ближнему концу стержня прикреплена пружина установки нуля.
[0022] В предпочтительном виде способа демонстрация состояния поплавка включает в себя демонстрацию состояния поплавка визуальными и/или звуковыми средствами.
[0023] В еще одном предпочтительном виде способа этапы могут включать в себя сохранение выходных данных от датчика в запоминающем устройстве.
[0024] В еще одном предпочтительном виде способа этапы могут включать в себя сравнение выходных данных от датчика с предшествующими выходными данными от датчика, сохраненными в запоминающем устройстве и извлеченными из него.
[0025] В еще одном предпочтительном виде способа этапы могут включать в себя отправку сигнала тревоги в ответ на выходные данные, полученные от датчика.
[0026] В еще одном предпочтительном виде способа этапы могут включать в себя отправку сигнала тревоги в ответ на сравнение выходных данных от датчика с предшествующими выходными данными от датчика.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
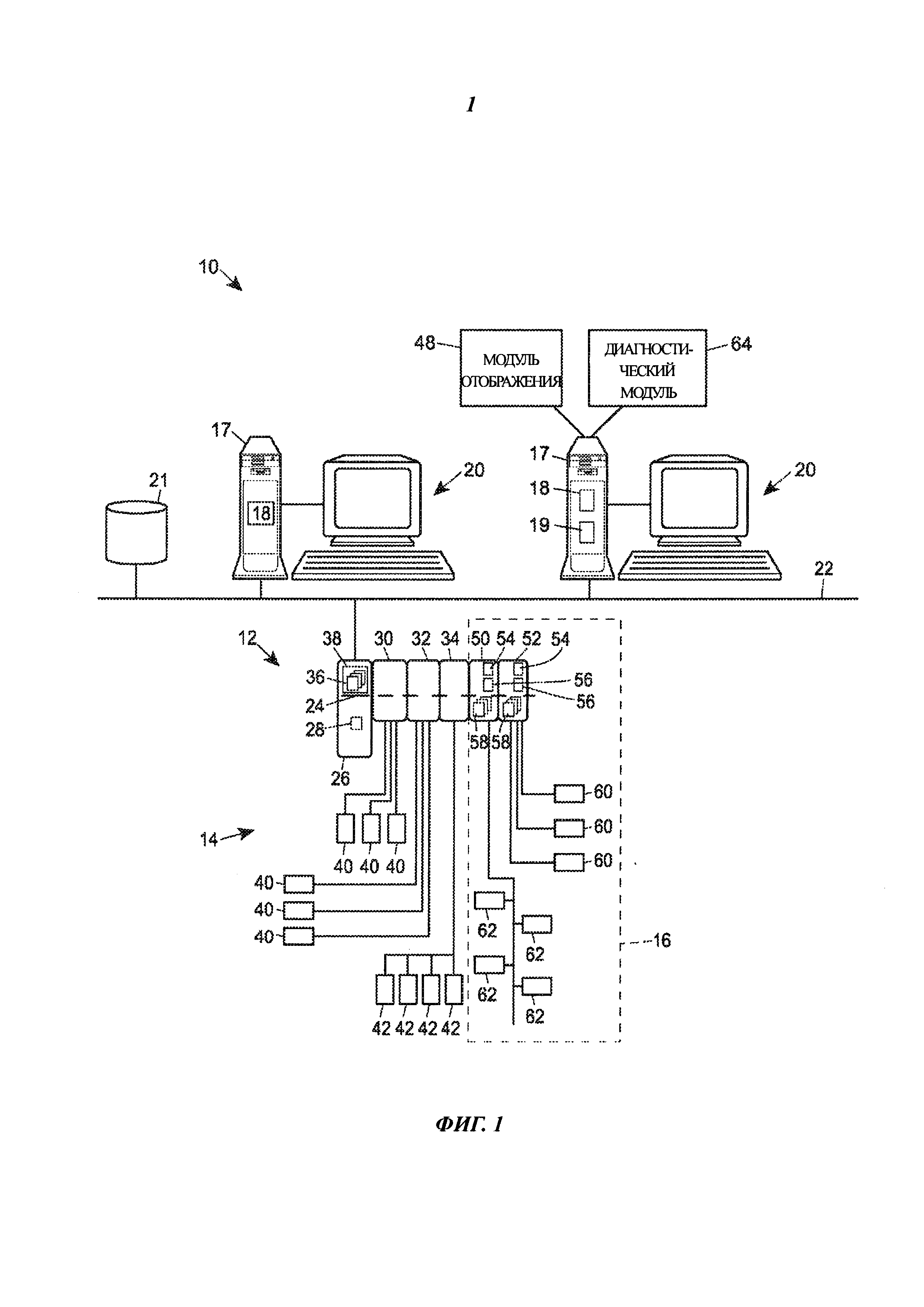
[0027] Фиг. 1 - блок-схема примера технологической установки, содержащей систему управления процессом и систему обеспечения безопасности.
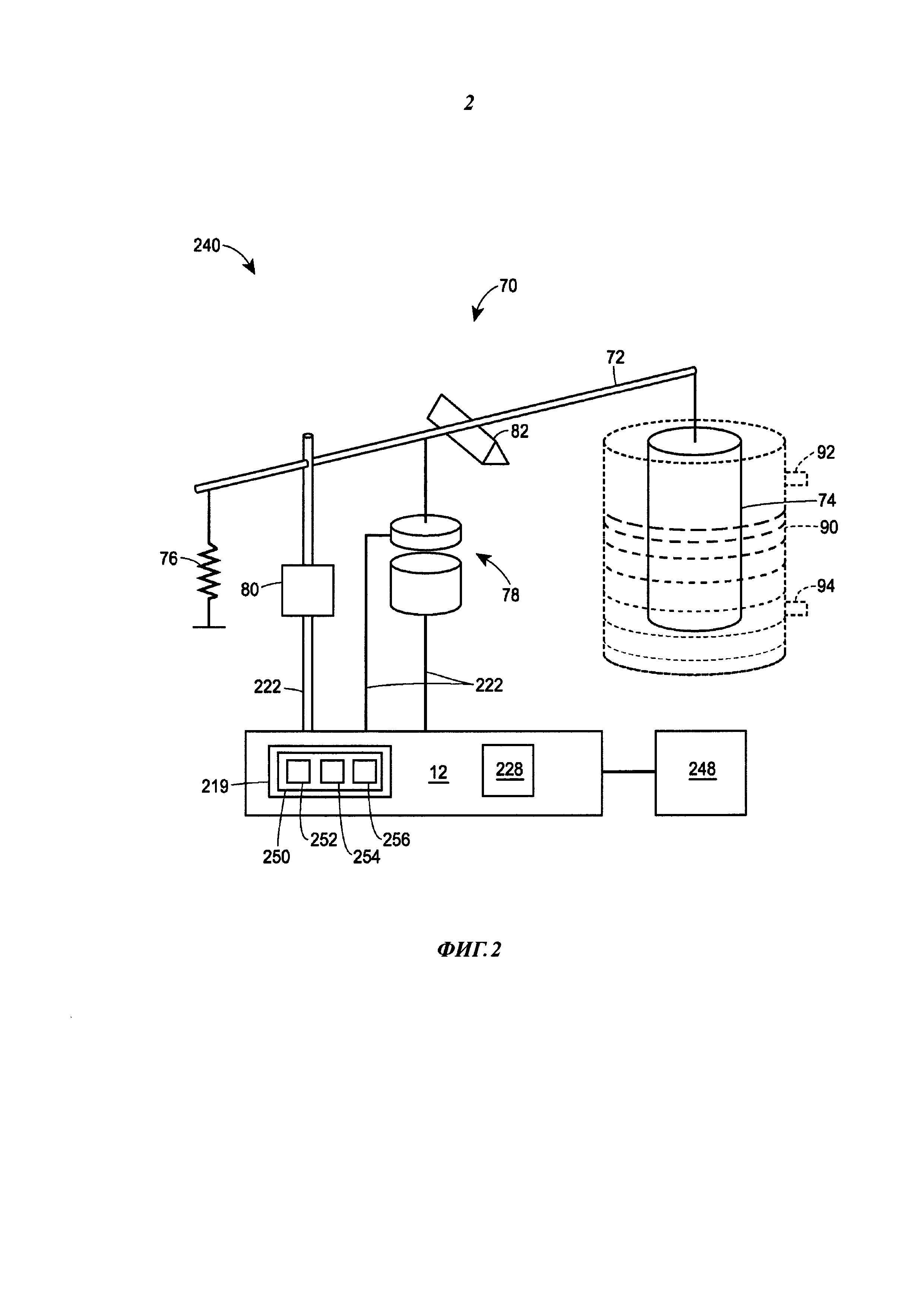
[0028] Фиг. 2 - блок-схема одного варианта осуществления изобретения, функционально связанная с примером периферийного устройства.
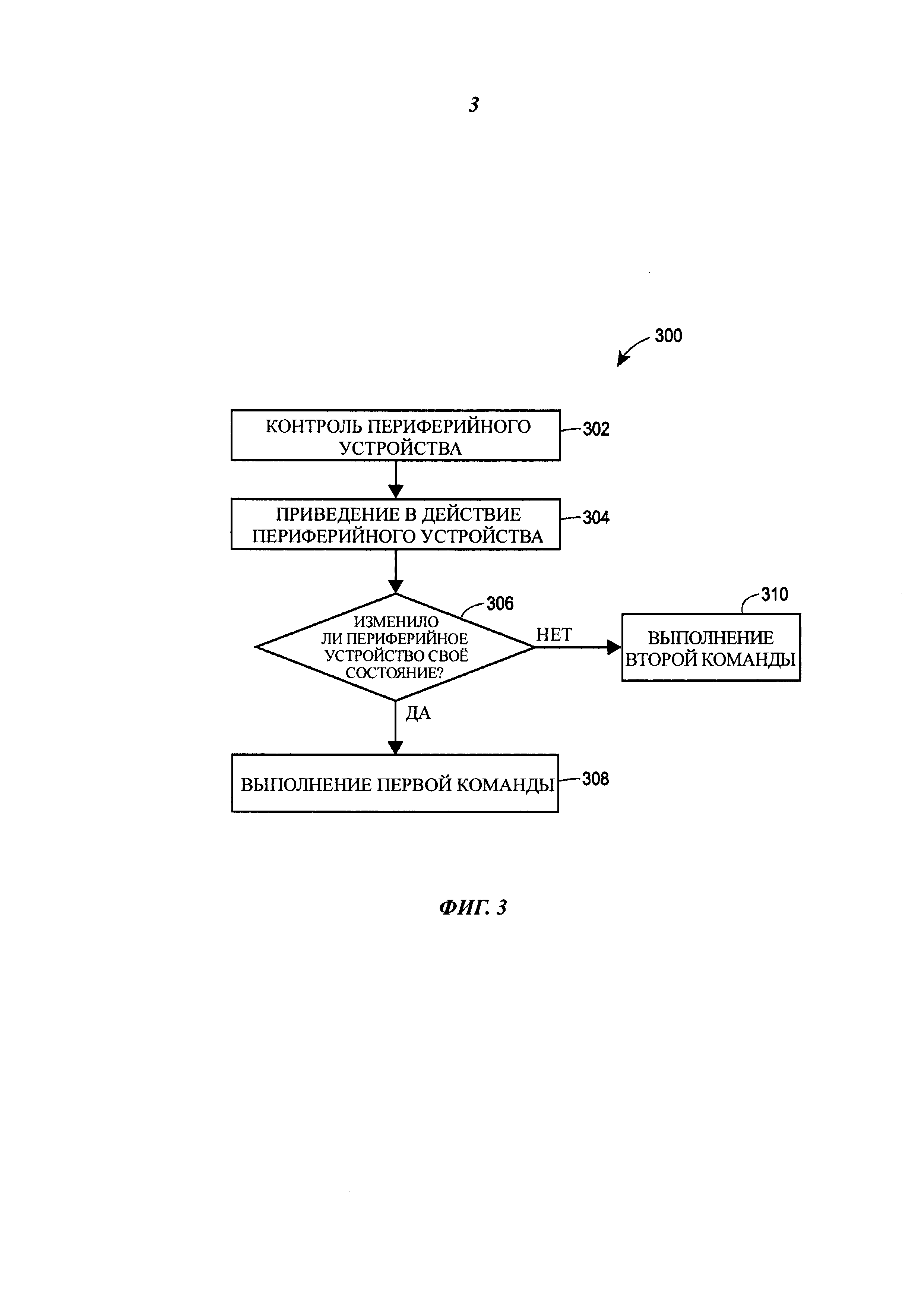
[0029] Фиг. 3 иллюстрирует пример модуля или схему технологического процесса для подтверждения работоспособности и возможности использования примера периферийного устройства, показанного на фиг. 2.
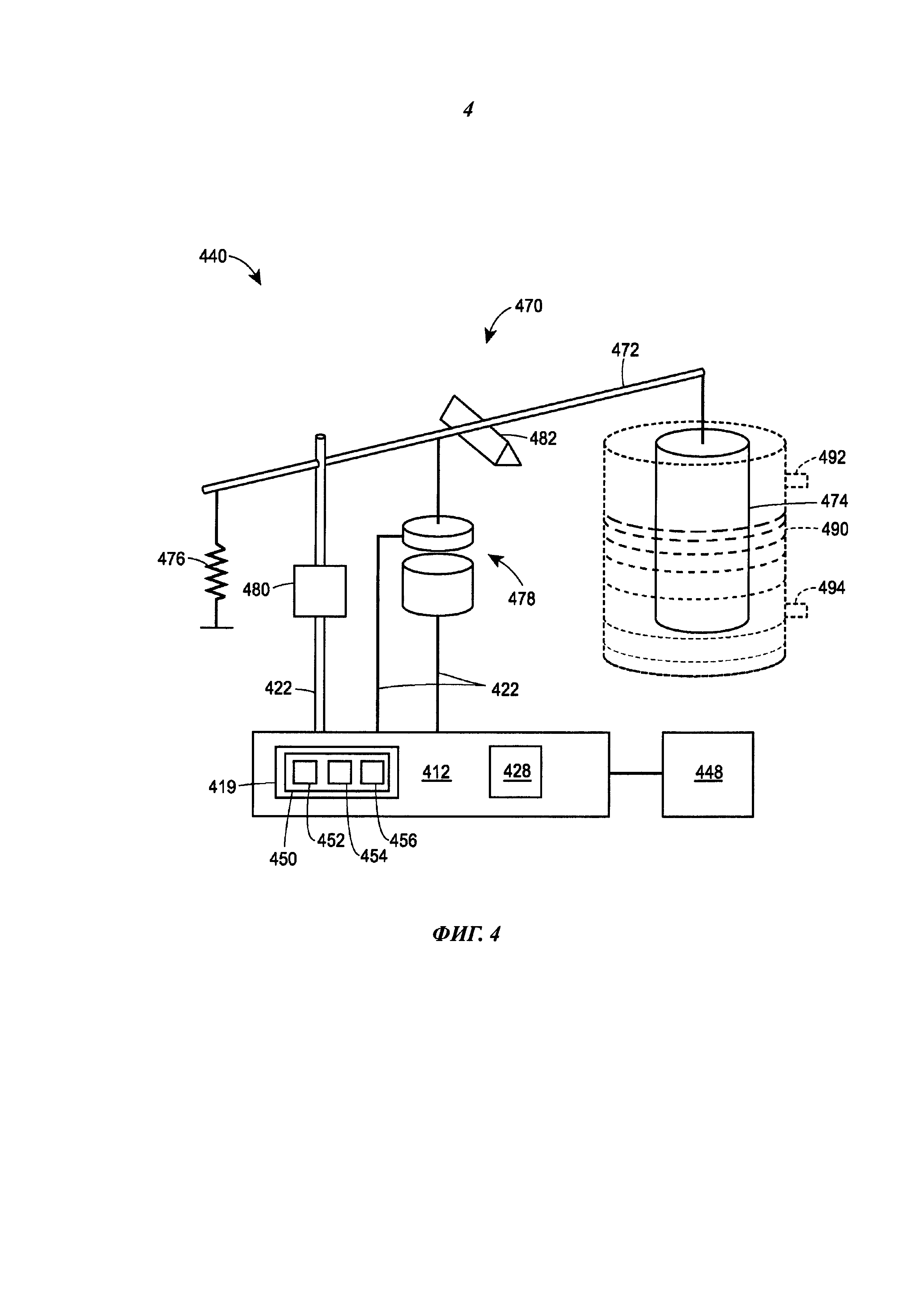
[0030] Фиг. 4 - блок-схема другого варианта осуществления изобретения, функционально связанная с примером периферийного устройства.
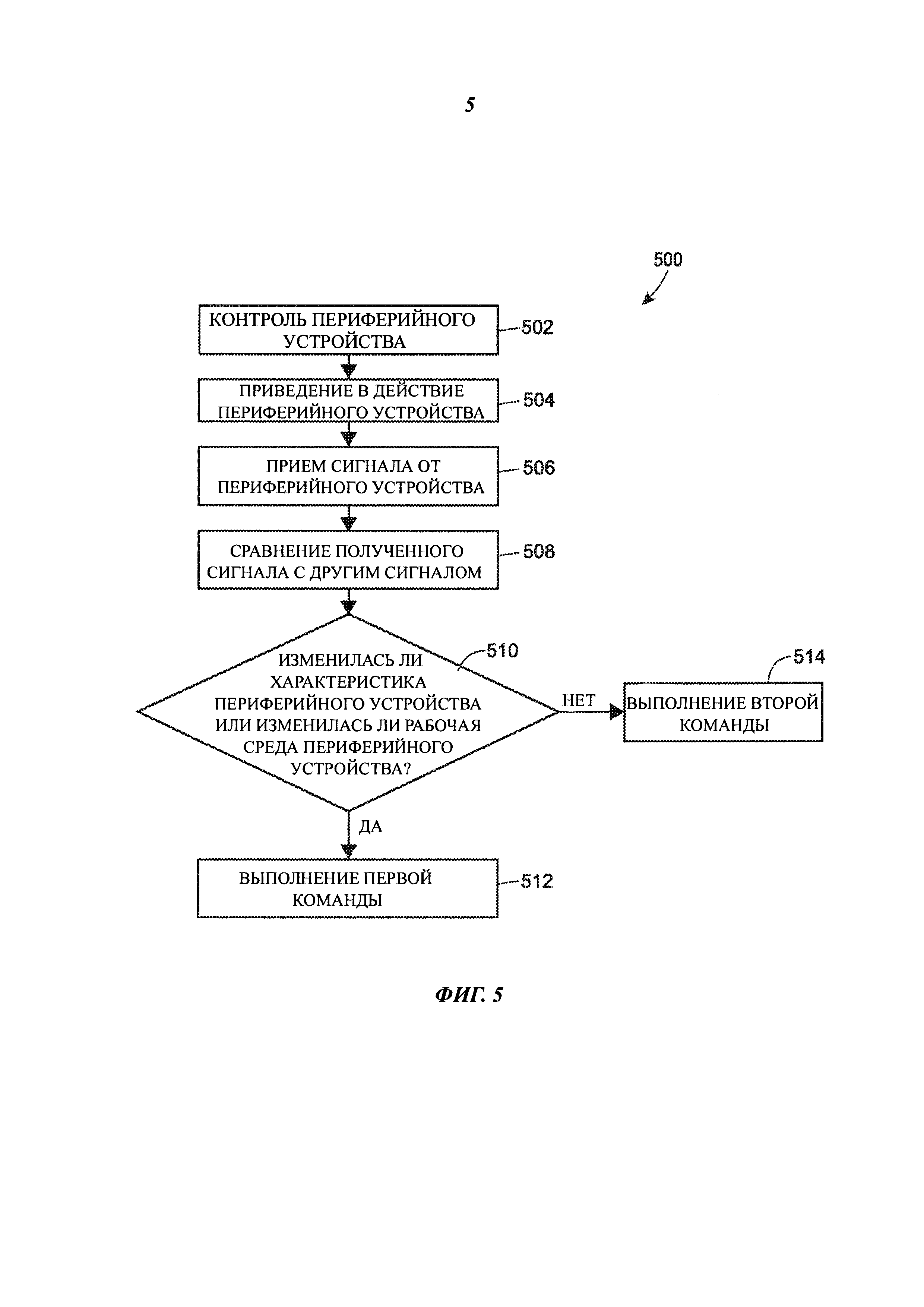
[0031] Фиг. 5 иллюстрирует пример модуля или схему технологического процесса для подтверждения работоспособности и возможности использования примера периферийного устройства, показанного на фиг. 4.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0032] На фиг. 1 показана технологическая установка 10, содержащая узел 12 регулирования процесса / управления безопасностью, который может содержать систему 14 управления процессом, объединенную с системой 16 обеспечения безопасности (изображена пунктирными линиями). Система 16 обеспечения безопасности в целом действует как приборная система безопасности (SIS) и может контролировать действие системы 14 управления процессом для гарантии безопасного действия технологической установки 10. При необходимости система 16 обеспечения безопасности может блокировать команды системы управления процессом 14.
[0033] Технологическая установка 10 также содержит одну или больше главных рабочих станций 17 или вычислительных устройств, которые могут быть, например, любым типом компьютера. Каждая рабочая станция 17 может содержать процессор 18, запоминающее устройство 19 и/или пользовательский интерфейс 20, такой как экранный монитор и/или клавиатура, которая доступна управляющему персоналу. В примере технологической установки 10, показанной на фиг. 1, показаны две рабочие станции 17, связанные с узлом 12 регулирования процесса / управления безопасностью и с внешним запоминающим устройством 21 посредством общей линии или канала 22 связи. Канал 22 связи может быть выполнен, используя любую необходимую аппаратуру с шиной или без шины, структуру связи с кабельной или беспроводной связью, или подходящий протокол связи, такой как протокол Ethernet.
[0034] Технологическая установка 10 содержит как устройства системы управления процессом, так и устройства системы обеспечения безопасности, функционально связанные вместе посредством системы шин, которая может быть выполнена на общей системной плате 24, на которой закреплены различные регуляторы процесса и устройства ввода/вывода данных. Технологическая установка 10, показанная на фиг. 1, содержит по меньшей мере один регулятор 26 процесса, снабженный процессором 28 и одним или больше устройств 30, 32, 34 ввода/вывода (I/O) данных системы управления процессом. Каждое устройство 30, 32, 34 ввода/вывода системы управления процессом соединено коммуникативно с рядом периферийных устройств, связанных с регулированием процесса, показанных на фиг. 1 как периферийные устройства 40, 42 регулятора. Регулятор 26, устройства 30, 32, 34 ввода/вывода и периферийные устройства 40, 42 в целом образуют систему 14 управления процессом узла 12 регулирования процесса / управления безопасностью.
[0035] Регулятор 26 процесса, который может быть, только в качестве примера, контроллером DeltaV™, продаваемым компанией Emerson Process Management, или любым другим необходимым типом регулятора процесса, является программируемым для обеспечения выполнения функций управления процессом, используя устройства 30, 32, 34 ввода/вывода и периферийные устройства 40, 42. В частности, процессор 28 регулятора 26 реализует или контролирует один или больше процессов управления или принципов управления во взаимодействии с периферийными устройствами 40, 42 и рабочими станциями 17 для управления технологической установкой 10 или частью технологической установки в любом нужном режиме. Периферийные устройства 40, 42 могут быть любого необходимого типа, такими как датчики, клапаны, передатчики, устройства позиционирования и др., и могут соответствовать любым необходимым открытым, патентованным или другим протоколам связи или программирования включая, например, протокол HART или протокол 4-20 мА (как показано для периферийного устройства 40), любой протокол (опроса) шины, такой как протокол Foundation® Fieldbus (как показано для периферийных устройств 42), или протоколы CAN, Profibus и AS-Interface, и многие другие. Аналогично, каждое из устройств 30, 32, 34 ввода/вывода может быть известным типом устройства ввода/вывода данных управления процессом, использующим любой подходящий протокол связи.
[0036] Регулятор 26 может быть выполнен с возможностью выполнения процесса управления или принципа управления в любом необходимом режиме. Например, регулятор 26 может осуществлять принцип управления с использованием того, что обычно называют функциональными блоками, где каждый функциональный блок является частью или объектом целой подпрограммы управления и действует в сочетании с другими функциональными блоками (с помощью сообщений, называемых ссылками) для осуществления контуров управления процессом в системе 14 управления процессом. Функциональные блоки, как правило, выполняют одну из функций: функция ввода, такая, которая связана с передатчиком, датчиком или другим устройством измерения параметра процесса; функция управления, такая, которая связана с подпрограммой управления, выполняющей пропорционально-интегрально-дифференциальное регулирование (ПИД), регулирование нечеткой логики и др.; или функция вывода, которая управляет действием некоторых устройств, таких как клапан, для выполнения некоторых физических функций в системе 14 управления процессом. Могут также существовать гибриды данных функциональных блоков, а также другие типы функциональных блоков. В то время как здесь представлено описание системы управления с использованием принципа управления по функциональным блокам, который включает в себя принцип объектно-ориентированного программирования, принцип управления или подпрограммы управления могут также быть реализованы или разработаны с использованием других правил, таких как, например, схемы многоступенчатой логики или схемы секвенциальных функций, или с использованием любых необходимых языков или принципов программирования.
[0037] Для целей настоящего описания термины: принцип управления, подпрограмма управления, модуль управления, функциональный блок управления, модуль обеспечения безопасности, логический модуль обеспечения безопасности и контур управления по существу обозначают программу управления, выполняемую для управления процессом, и эти термины могут здесь использоваться как взаимозаменяемые. Однако для целей следующего описания будет использоваться термин модуль управления. Кроме того, следует отметить, что описанный в настоящем документе модуль управления может иметь части, при потребности реализованные или выполняемые на других регуляторах или других устройствах. Кроме того, описанные в настоящем документе модули управления, реализуемые в системе 14 управления процессом и/или системе 16 обеспечения безопасности, могут принимать любой вид, включая программное обеспечение, встроенное программное обеспечение, аппаратуру и любое их сочетание. Например, модули управления, которые могут быть подпрограммами управления или какой-либо частью программы управления, такими как подпрограмма или части подпрограммы (например, строки команды), могут быть реализованы в любом необходимом формате программного обеспечения, например, с использованием многоступенчатой логики, схем секвенциальных функций, графиков подпрограмм управления, объектно-ориентированного программирования или любого другого языка программирования или принципа разработки программного обеспечения. Аналогично, описанные в настоящем документе модули управления могут быть жестко запрограммированы, например, в одном или больше стираемых программируемых постоянных запоминающих устройств, СППЗУ, электрически стираемых программируемых постоянных запоминающих устройств, ЭСППЗУ, специализированных интегральных схем (ASIC), программируемых логических устройств управления (ПЛК), или любых других элементов аппаратуры или встроенного программного обеспечения. Модули управления могут быть разработаны с использованием любых средств проектирования, в том числе, графических средств проектирования или любых других типов средств программирования или проектирования программного обеспечения / аппаратуры / встроенного программного обеспечения.
[0038] Один или больше модулей 36 управления могут быть сохранены в процессоре 38 в регуляторе 26 и выполнены в процессоре 28 регулятора 26, что является типичным в случае, когда функциональные блоки используются или связаны со стандартными устройствами 4-20 мА и некоторыми типами интеллектуальных периферийных устройств, таких как устройства HART. Модули 36 управления могут также быть сохранены в других ячейках 19, 21 памяти в системе 10 или реализованы с помощью самих периферийных устройств 40, 42, которые могут быть случаем с устройствами Fieldbus.
[0039] Система 16 обеспечения безопасности узла 12 регулирования процесса / управления безопасностью содержит одно или больше логических решающих устройств 50, 52 системы обеспечения безопасности. Каждое из логических решающих устройств 50, 52 представляет собой регулятор обеспечения безопасности (также постоянно называемый устройством ввода/вывода данных), имеющий процессор 54, способный выполнять логические модули 58 обеспечения безопасности. Логические модули 58 обеспечения безопасности, которые могут быть аналогичны модулям 36 управления, могут быть сохранены в ячейке памяти 56 одного или обоих логических решающих устройств 50, 52. Логические решающие устройства 50, 52 соединены коммуникативно для создания управляющих сигналов и/или приема сигналов от периферийных устройств 60, 62 системы обеспечения безопасности. Регуляторы 50, 52 обеспечения безопасности и периферийные устройства 60, 62 системы обеспечения безопасности в целом образуют систему 16 обеспечения безопасности по фиг. 1.
[0040] Периферийные устройства 60, 62 обеспечения безопасности могут быть любым необходимым типом периферийного устройства, соответствующим любому известному или необходимому протоколу связи, такому, как упомянуты выше, или использующим его. В частности, периферийные устройства 60, 62 могут быть связанными с обеспечением безопасности периферийными устройствами типа, который обычно регулируется посредством отдельной, выделенной системы управления, связанной с обеспечением безопасности, такой как детектор уровня жидкости или клапан аварийного выключения (ESD). В технологической установке 10, показанной на фиг. 1, периферийные устройства 60 обеспечения безопасности изображены, как использующие протокол выделенной или прямой связи, такой как протокол HART или 4-20 мА, тогда как периферийные устройства 62 обеспечения безопасности показаны, как использующие протокол связи через шину, такой как протокол Fieldbus. В общем, устройства обеспечения безопасности (как регуляторы 50, 52, так и периферийные устройства 60, 62 системы обеспечения безопасности), используемые как часть системы 16 обеспечения безопасности, должны рассчитываться как устройства обеспечения безопасности, а это обычно означает, что эти устройства должны проходить процедуру оценки, чтобы оцениваться надлежащим органом как устройство обеспечения безопасности.
[0041] Системная плата 24 (показана пунктирной линией через регулятор 26 процесса, устройства 30, 32, 34 ввода/вывода, и регуляторы 50, 52 обеспечения безопасности) используется для соединения регулятора 26 процесса с картами 30, 32, 34 ввода/вывода данных управления процессом, а также с регуляторами 50, 52 обеспечения безопасности. Регулятор 26 процесса также соединен коммуникативно с шиной 22 и действует как схема разрешения конфликтов шины для осуществления возможности связи каждого из устройств 30, 32, 34 ввода/вывода и регуляторов 50, 52 обеспечения безопасности с любой из рабочих станций 17 или запоминающих устройств 21 через шину 22. Системная плата 24 также обеспечивает возможность регуляторам 50, 52 обеспечения безопасности связываться друг с другом и координировать функции безопасности, выполняемые на каждом из этих устройств, передавать данные друг другу или выполнять другие интегрирующие функции.
[0042] Каждая из рабочих станций 17 может содержать процессор 18 и запоминающее устройство 19 рабочей станции. Один или больше модулей 36 управления и/или логических модулей 58 обеспечения безопасности могут быть сохранены в запоминающем устройстве 19 и могут иметь возможность выполнения в любом из процессоров 18, 28, 54 в технологической установке 10. В общем, один или больше из модулей 36, 58 могут быть выполнены с помощью одного из процессоров для управления и/или контроля процесса с помощью одного или больше периферийных устройств 40, 42, 60, 62. Модуль 48 отображения показан в разобранном виде на фиг. 1, как сохраняемый в запоминающем устройстве 19 одной из рабочих станций 17. Однако при необходимости модуль 48 отображения может сохраняться и выполняться в другой рабочей станции 17 или в другом вычислительном устройстве, связанном с технологической установкой 10. Модуль 48 отображения может быть любым типом интерфейса, который, например, дает пользователю возможность манипулировать значениями данных (например, выполнять считывание или запись), посредством этого изменяя действие модулей 36 управления или 58 обеспечения безопасности в любой из двух или обеих системах, системе 12 управления и системе 14 обеспечения безопасности. Таким образом, если указано, что запись должна быть выполнена, например, в модуле 36 управления, связанном с системой 12 управления, или в одном из периферийных устройств 40, 42, модуль 48 отображения обеспечивает, чтобы запись выполнялась. Кроме того, если указано, что запись должна быть выполнена, например, в логическом модуле 58 обеспечения безопасности, связанном с системой 14 обеспечения безопасности, или в одном из периферийных устройств 60, 62, модуль 48 отображения обеспечивает, чтобы запись выполнялась.
[0043] В общем, система управления содержит регулятор, который выполнен для реагирования на заданный или возникающий триггер события, связанный с условиями процесса. Один или больше модулей управления могут быть выполнены с помощью одного или больше процессоров для контроля и/или управления процессом посредством одного или больше периферийных устройств. Данные о процессе или обеспечении безопасности получаются с помощью периферийного устройства и передаются в регулятор, при этом регулятор при необходимости может корректировать процесс. Например, в системе регулирования уровня, регулятор может контролировать процесс на предмет возникновения триггера события, связанного с уровнем жидкости, превышающим верхний пороговый предел в накопительной емкости. Регулятор может использовать датчик для обнаружения положения устройства, такого как буй или поплавок, расположенный в жидкости. Если поплавок превышает верхний пороговый предел, датчик будет срабатывать, и связанные данные могут быть переданы в регулятор. Регулятор может сохранять и/или сообщать данные управляющему персоналу и/или регулировать заданное значение или положение другого периферийного устройства, такого как клапан, для предотвращения поступления жидкости в накопительной емкости.
[0044] В некоторых системах управления может существовать один или больше компонентов, которые требуется перемещать в ходе нормального режима работы, и в тоже время некоторые из этих компонентов могут быть обычно выключенными или бездействующими во время значительной части их работы. Например, подвижные компоненты, связанные с механизмом обнаружения датчика высокого уровня могут быть бездействующими в течение значительного промежутка времени, если уровень жидкости изредка достигает верхнего порогового предела. Однако когда уровень жидкости достигает верхнего порогового предела, существует опасение, что подвижные компоненты датчика могут не функционировать должным образом из-за длительного бездействия. Для подтверждения того, что периферийное устройство доступно и для гарантии его работоспособности, может быть выполнена диагностическая проверка периферийного устройства, при которой регулятор может имитировать возникновение триггера события для отключения части датчика путем перемещения подвижных компонентов периферийного устройства. Периодическое возбуждение подвижных компонентов может защитить от малоподвижного характера периферийного устройства обнаружения высокого уровня и его нормального «сухого» состояния эксплуатации. После возбуждения подвижных компонентов периферийного устройства регулятор может записывать операции и предпринимать необходимые действия в зависимости от наблюдаемого правильного или неправильного результата, такие как запись и/или передача соответствующих данных, связанных с диагностической проверкой и корректировкой других периферийных устройств в системе управления.
[0045] Один вариант осуществления настоящего изобретения для подтверждения возможности использования и работоспособности периферийного устройства 240, используемого в системе 12 управления технологической установкой показан на фиг. 2. В данном варианте осуществления периферийное устройство 240 используется для контроля уровня жидкости в накопительной емкости 90, который показан пунктирными линиями на фиг. 2 и, как правило, содержит вход 92 и выход 94. Однако должно быть понятно, что в систему и способ по настоящему изобретению может быть интегрирован любой другой тип периферийного устройства, имеющего подвижную часть, такую как клапан или переключатель, используемый для любого другого типа соответствующей функции. Периферийное устройство 240 содержит подвижный узел 70, имеющий продолговатый элемент, такой как стержень или штанга 72, функционально связанный с точкой 82 опоры. Поплавок или плавающее устройство 74 соединен с дальним концом стержня 72. Стержень 72 может перемещаться или поворачиваться вокруг точки 82 опоры в ответ на перемещение поплавка 74. Пружина 76 установки нуля может быть прикреплена к ближнему концу стержня 72 и при необходимости может использоваться управляющим персоналом для корректировки периферийного устройства 240 для действия в соответствии с характеристиками поплавка 74 и/или ожидаемыми условиями окружающей среды.
[0046] Поплавок 74 включает одну или больше характеристик, таких как, например, масса, объем и плавучесть, и расположен в жидкости накопительной емкости 90. Поплавок 74 реагирует на окружающую его рабочую среду и, в частности, на одно или больше свойств или характеристик жидкости, таких как, например, уровень, вязкость, плотность и температура. Поплавок 74 по существу плавает в жидкости, содержащейся в накопительной емкости 90, и способен адаптироваться к колеблющемуся уровню жидкости. Положение поплавка 74 в жидкости накопительной емкости 90 контролируется с помощью процессора 228 через линию или шину 222 связи, а связанная информация может быть передана управляющему персоналу на любой из рабочих станций в установке.
[0047] Приводной механизм 78 функционально связан с подвижным узлом 70. В варианте осуществления, показанном на фиг. 2, приводной механизм 78 присоединен между стержнем 72 и узлом 12 регулирования. Приводной механизм 78 может быть любым типом устройства, способным передавать перемещение к подвижному узлу 70, так, чтобы дублировать перемещение поплавка 74 в результате изменения уровня жидкости. Приводной механизм 78 может быть электрическим, механическим или электромеханическим устройством, таким как, например, соленоид или электромагнит. Процессор 228, который соединен с приводным механизмом 78 через линию или шину 222 связи, способен включать приводной механизм 78 и способствовать перемещению поплавка 74.
[0048] Модули 250 управления, которые могут содержать один или больше диагностических модулей, сохраняются в запоминающем устройстве 219, которое соединено коммуникативно с процессором 228. Будучи выполняемым в процессоре 228, диагностический модуль способен выполнять диагностическую проверку или часть диагностической проверки в периферийном устройстве 240. Например, диагностический модуль может содержать: приводящий в действие модуль 252, который способствует приведению в действие приводного механизма 78, демонстрирующий модуль 254, который способствует демонстрации результата диагностической проверки на устройстве 248 вывода, и анализирующий модуль 256, который может анализировать и сравнивать результаты одной или большего количества диагностических проверок. Диагностический модуль содержит команды или инструкции, которые могут быть отправлены в приводной механизм 78 с помощью процессора 228 для передачи перемещения к поплавку 74. Команды могут инициироваться управляющим персоналом и по отдельности передаваться с помощью процессора 228 по мере необходимости, и/или команды могут быть запрограммированы для периодической передачи или в ответ на триггер события, такой как, например, прохождение периода бездействия для периферийного устройства 240. Управляющий персонал может назначать момент и/или триггер события для выполнения диагностической проверки периферийного устройства 240 регулирования уровня, что может обеспечить увеличенную гибкость в обслуживании периферийного устройства 240. Все формулировки, сравнения и определения, связанные с диагностической проверкой и любыми последующими ответными действиями, могут применяться в рамках взаимодействия с узлом 12 регулирования.
[0049] Датчик 80 механически соединен и/или функционально связан с подвижным узлом 70 в любой необходимой конфигурации, в которой датчик способен измерять величину, которая представляет характеристику периферийного устройства 240 и/или рабочей среды. Характеристика периферийного устройства 240 или рабочей среды может включать в себя, например, уровень жидкости, вязкость жидкости, выталкивающую способность жидкости, плотность жидкости, массу поплавка, вес поплавка или плавучесть поплавка. Датчик 80 способен преобразовывать измеренную величину в сигнал данных, который может быть в виде механического сигнала или электрического сигнала, такого как, например, аналоговое или цифровое напряжение.
[0050] В варианте осуществления, показанном на фиг. 2, датчик 80 способен измерять и/или обнаруживать перемещение поплавка 74 с помощью стержня 72, который может быть механически соединен или функционально связан с приводным механизмом 78. Перемещение поплавка 74 при содействии приводного механизма 78 может, следовательно, быть обнаружено датчиком 80 с помощью перемещения стержня 72. Перемещение поплавка 74 может быть измерено и преобразовано в данные, передаваемые на выход датчика 80. Данные могут быть в виде электрического сигнала, такого как аналоговое или цифровое напряжение, или, например, положения переключателя, и могут считываться блоком наблюдения или функционально связанным устройством, таким как процессор 228. Процессор 228 может предпринимать следующее действие в ответ на данные, представленные датчиком 80, и/или данные могут отображаться визуальными и/или звуковыми средствами на устройстве 248 вывода данных и/или сохраняться в запоминающем устройстве 219 в узле 12 управления.
[0051] На фиг. 3 изображена блок-схема 300 варианта осуществления способа по изобретению, который может использоваться с конфигурацией, показанной на фиг. 2, где работоспособность и/или возможность использования периферийного устройства 240 может быть подтверждена на дискретной или периодической основе. В частности, периферийное устройство 240 может быть проверено, чтобы гарантировать, что поплавок 74 обладает возможностью перемещения и способен функционировать надлежащим образом. Перемещение поплавка 74 контролируется процессором 228 с помощью датчика 80 (этап 302). Выход датчика 80 может включать в себя одно или больше состояний. Например, первое состояние может быть связано с частью периферийного устройства 240, находящегося в первом положении, таком, когда поплавок 74 находится в положении ниже заранее заданного уровня, тогда как второе состояние может быть связано с поплавком 74 находящимся во втором положении вблизи или выше заранее заданного уровня. Приводной механизм 78 приводится в действие посредством выполнения приводящего в действие модуля 250 процессором 228 (этап 304). Приводящий в действие модуль 250 может сохраняться в одной из ячеек памяти в системе управления. После того как приводной механизм 78 приведен в действие с помощью процессора 228, состояние датчика 80, или то, изменил ли датчик свое состояние, определяется процессором 228 (этап 306). Если датчик 80 изменил состояние, процессор 228 может выполнить первую команду (этап 308). Первая команда может включать в себя запись полученного состояния в одном или больше запоминающих устройств и/или демонстрацию результата посредством выполнения демонстрирующего модуля 254. Полученное состояние может быть представлено визуальными и/или звуковыми средствами на устройстве 248 вывода данных одного или больше пользовательских интерфейсов или рабочих станций в системе управления. Как вариант, если датчик 80 не изменил состояние, процессор 228 может выполнить вторую команду (этап 310). Вторая команда может включать в себя запись полученного состояния в одном или больше запоминающих устройств и/или представление результата визуальными и/или звуковыми средствами с помощью демонстрирующего модуля 254 на устройстве 248 вывода данных одного или больше пользовательских интерфейсов или рабочих станций в системе управления.
[0052] Другой вариант осуществления изобретения для подтверждения работоспособности и возможности использования периферийного устройства, интегрированного в систему управления, показан на фиг. 4. В данном варианте осуществления периферийное устройство 440 используется для контроля и регулирования уровня жидкости в накопительной емкости 490, который показан пунктирными линиями на фиг. 4 и, как правило, содержит вход 492 и выход 494. Однако должно быть понятно, что периферийное устройство может быть любым другим типом периферийного устройства, имеющего подвижную часть, такую как клапан или переключатель, которая может быть интегрирована в систему и способ по изобретению. Периферийное устройство 440 содержит подвижный узел 470, имеющий продолговатый элемент, такой как стержень или штанга 472, функционально связанный с точкой 482 опоры. Поплавок или плавающее устройство 474 соединен с дальним концом стержня 472. Стержень 472 может перемещаться или поворачиваться вокруг точки 482 опоры в ответ на перемещение поплавка 474. Пружина 476 установки нуля может быть прикреплена к ближнему концу стержня 472 и может использоваться для корректировки периферийного устройства 440 в соответствии с характеристиками поплавка 474 и/или ожидаемыми условиями окружающей среды.
[0053] Поплавок 474 включает одну или больше характеристик, таких как, например, масса, объем и плавучесть, и расположен в жидкости накопительной емкости 490. Поплавок 474 реагирует на окружающую его рабочую среду и, в частности, на одно или больше свойств или характеристик жидкости, таких как, например, уровень, вязкость, плотность и температура. Поплавок 474 по существу плавает в жидкости, содержащейся в накопительной емкости 490, и способен адаптироваться к колеблющемуся уровню жидкости. Положение поплавка 474 в жидкости накопительной емкости 490 контролируется с помощью процессора 428 через линию или шину 422 связи, а связанная информация может быть передана управляющему персоналу на любой из рабочих станций в установке.
[0054] Приводной механизм 478 функционально связан с подвижным узлом 470 и может быть присоединен между стержнем 472 и процессором 428 узла 412 управления. Приводной механизм 478 может быть любым типом устройства, которое способно передавать перемещение к подвижному узлу 470, который в итоге вызывает перемещение поплавка 474. Приводной механизм 478 может быть электрическим, механическим или электромеханическим устройством, таким как, например, соленоид или электромагнит. Процессор 428, который соединен с приводным механизмом 478 через линию или шину 422 связи, способен включать приводной механизм 478 и способствовать перемещению поплавка 474.
[0055] Модули 450 управления, которые могут содержать один или больше диагностических модулей, сохраняются в запоминающем устройстве 419, которое соединено коммуникативно с процессором 428. Будучи выполняемым в процессоре 428, диагностический модуль способен выполнять диагностическую проверку или часть диагностической проверки в периферийном устройстве 440. Например, диагностические модули могут содержать: приводящий в действие модуль 452, который способствует приведению в действие приводного механизма 478, демонстрирующий модуль 454, который способствует демонстрации результата диагностической проверки на устройстве 448 вывода, и анализирующий модуль 456, который может анализировать и сравнивать результаты одной или большего количества диагностических проверок. Диагностический модуль содержит команды или инструкции, которые могут быть отправлены в приводной механизм 478 с помощью процессора 428 для передачи перемещения к поплавку 474. Команды могут инициироваться управляющим персоналом и по отдельности передаваться с помощью процессора 428 по мере необходимости, и/или команды могут быть запрограммированы для периодической передачи или в ответ на триггер события, такой как, например, прохождение периода бездействия для периферийного устройства 440. Управляющий персонал может назначать один или больше моментов и/или триггеров события для выполнения диагностической проверки периферийного устройства 440 контроля уровня, что может обеспечить увеличенную гибкость в обслуживании периферийного устройства 440. Все формулировки, сравнения и определения, связанные с диагностической проверкой и любыми последующими ответными действиями, могут применяться в рамках взаимодействия с узлом 412 регулирования.
[0056] Рабочая среда и/или одна или больше характеристик поплавка 474 может контролироваться процессором 428 с помощью датчика 480, механически соединенного и/или электрически связанного с подвижным узлом 470. Датчик 480 может быть дискретным или цифровым преобразователем, способным получать и/или принимать одно или больше измерений величин, которые представляют рабочую среду или одну или больше характеристик периферийного устройства 440. Как вариант, датчик 480 может быть пропорциональным или аналоговым преобразователем, способным непрерывно получать и/или измерять величину, или ту, которая представляет рабочую среду, или одну или больше характеристик периферийного устройства 440. Характеристика периферийного устройства 440 или рабочей среды может включать в себя, например, уровень жидкости, вязкость жидкости, выталкивающую способность жидкости, плотность жидкости, массу поплавка, вес поплавка или плавучесть поплавка. Датчик 480 способен преобразовывать полученную и/или измеренную величину в сигнал данных, который может быть в виде механического сигнала или электрического сигнала, такого как, например, аналоговое или цифровое напряжение.
[0057] Данные, переданные датчиком 480, могут анализироваться управляющим процессором 428 для определения рабочих условий поплавка 474. Анализ может включать в себя сравнение нормативных данных с данными, полученными в процессе измерений. Кроме того, анализ может включать в себя сравнение данных, полученных в процессе нескольких измерений, принятых в различные моменты. Нормативные данные и данные, полученные путем измерений, могут быть сохранены в запоминающем устройстве 419 системы управления. В зависимости от результата сравнения управляющий процессор 428 может сохранять результирующий анализ в запоминающем устройстве 419 в системе управления 412 и/или отображать результирующий анализ визуальными или звуковыми средствами на устройстве 448 вывода данных.
[0058] В варианте осуществления, показанном на фиг. 4, процессор 428 способен приводить в действие приводной механизм 478 для подъема поплавка 474 из жидкости. После возвращения поплавка 474 в жидкость непрерывный датчик 480, который может содержать датчик на эффекте Холла, может принимать непрерывные измерения, связанные с положением поплавка 474 в жидкости. Более конкретно, после возвращения в жидкость поплавок 474 будет, вероятно, всплывать и погружаться, в конечном счете, достигая более устойчивого положения в жидкости. В течение этого времени датчик 480 может получать данные, связанные с качанием поплавка 474, например, частоту, амплитуду, демпфирование и/или резонанс качания поплавка. Эти данные могут быть связаны с характеристиками поплавка 474 и/или рабочей средой. Датчик 480 способен преобразовывать данные, принятые от подвижного узла 470, в представляющий сигнал, подаваемый как выходной сигнал в управляющий процессор 428. Данные представляющего сигнала могут сохраняться в запоминающем устройства 419 и/или анализироваться с помощью анализирующего модуля 456 и сравниваться с другими связанными данными, сохраненными в запоминающем устройстве для определения того, возникли ли изменения в эксплуатационных характеристиках поплавка 474 и/или рабочей среды. Данные могут также сравниваться с данными норматива, чтобы помочь определению того, находится ли одна или больше характеристик поплавка в надлежащем рабочем порядке, или того, изменилась ли рабочая среда.
[0059] Анализ данных может обнаружить, что одна или больше характеристик поплавка 474 изменилась, начиная с ее исходного состояния. Любые изменения характеристик поплавка могут влиять на возможность и точность измерений периферийного устройства 440, и может потребоваться ремонт или замена поплавка 474. Например, известно, что парафин и другие инородные вещества пристают к поплавку во время использования, что может влиять на характеристики плавучести поплавка. Изменение в характеристике плавучести поплавка может быть выведено путем наблюдения за изменением в частоте, амплитуде, демпфировании и/или резонансе качания поплавка.
[0060] Анализ данных может также обнаружить, что рабочая среда поплавка изменилась, начиная с ее исходного состояния. В частности, любое изменение в текучей среде в накопительной емкости 490 может поддаваться обнаружению вследствие изменения относительно измеренных в исходном состоянии характеристик поплавка 474. То есть, если в накопительной емкости 490 была добавлена другая жидкость, изменение в вязкости, плотности или марке жидкости может поддаваться обнаружению по изменению в частоте, амплитуде, демпфировании и/или резонансе поплавка 474.
Таким образом, при знании характерного свойства (свойств) поплавка 474 и среды, в которой, как ожидается, должен работать поплавок, изменения, обнаруженные в любом из характерных свойств поплавка, могут представлять изменения рабочих условий поплавка или рабочей среды поплавка, таких как уровень или плотность жидкости.
[0061] На фиг. 5 изображена блок-схема 500 варианта способа по изобретению, который может использоваться в варианте осуществления, показанном на фиг. 4, где работоспособность датчика 480 может быть подтверждена на постоянной основе с помощью пропорционального датчика 480. В частности, процессор регулятора непрерывно контролирует периферийное устройство с помощью пропорционального датчика (этап 502). Приводной механизм 480 приводится в действие с помощью регулятора (этап 504), и поплавок 474 поднимается из жидкости, и обеспечивается возможность его возвращения в жидкость. Непрерывный сигнал принимается датчиком 480, преобразуется и подается к регулятору (этап 506) для анализа. Анализ может включать в себя сравнение самого последнего принятого выходного сигнала с нормативными данными, связанными с характеристиками поплавка и/или с рабочими характеристиками поплавка или анализ может включать в себя сравнение самого последнего принятого выходного сигнала с предшествующим принятым выходным сигналом или компиляцией предшествующих принятых выходных сигналов (этап 508). Путем выполнения анализирующего модуля в процессоре 428 регулятор 412 определяет, возникли ли изменения в характеристиках, измеренных в исходном состоянии поплавка (этап 510), и/или рабочей среде. Если произошли значительные изменения одной или больше характеристик поплавка и/или рабочей среды, процессор 412 может выполнять первую команду (этап 512). Первая команда может включать в себя запись данного результата в запоминающем устройстве 419 и/или отображение результата визуальными или звуковыми средствами на пользовательском интерфейсе 448. Кроме того, первая команда может включать в себя отображение и/или регистрацию сигналов тревоги, связанных с измененным сигналом. Если не было достаточного изменения характеристик поплавка, процессор 428 может выполнять вторую команду (этап 514). Вторая команда может включать в себя запись данного результата в запоминающем устройстве 419 и/или отображение результата визуальными или звуковыми средствами на одном или больше пользовательских интерфейсов в технологической установке. Отображению состояния устройства может способствовать один или больше процессоров, выполняющих показывающий модуль.
[0062] Прошлые методы подтверждения для накопительных емкостей жидкости включали периферийные устройства регулирования уровня, требующие присутствия управляющего персонала на месте установки периферийного устройства. Кроме того, для накопительных емкостей с встроенными выносными камерами система регулирования уровня должна быть приостановлена, когда выносная камера извлекается, осушается, повторно заполняется и проверяется. Из приведенного выше описания очевидно, что настоящее изобретение легко адаптируется к существующим электромеханическим системам регулирования уровня и способно обеспечивать быструю и точную оценку компонентов и рабочей среды удаленного периферийного устройства без вмешательства в систему управления и без необходимости присутствия управляющего персонала на месте установки периферийного устройства.
[0063] Хотя в настоящем документе раскрыты определенные варианты осуществления способов, устройств и изделий, объем защиты данного патента не ограничивается ими. Наоборот, данный патент охватывает все способы, устройства и изделия, явно подпадающие под объем защиты прилагаемой формулы, буквально или согласно доктрине эквивалентов.
[0064] В данном описании множественные примеры могут реализовать компоненты, операции или структуры, описанные как единичные примеры. Хотя отдельные операции одного или больше способов показаны и описаны как отдельные операции, одна или больше отдельных операций могут быть выполнены одновременно, и нет никаких требований, чтобы операции выполнялись в показанном порядке. Структуры и функции, показанные как отдельные компоненты в примерах конфигураций, могут быть реализованы как объединенная структура или компонент. Аналогично, структуры и функциональные возможности, представленные в виде единственного компонента, могут быть реализованы в виде отдельных компонентов. Эти и другие варианты, модификации, дополнения и усовершенствования попадают под объем действия настоящего документа.
[0065] Например, система 10 управления может включать, помимо прочего, любые сочетания локальной вычислительной сети (LAN), региональной вычислительной сети (MAN), глобальной вычислительной сети (WAN), мобильной, проводной или беспроводной сети, частной сети, или виртуальной частной сети. Кроме того, хотя для простоты и ясности описания на фиг. 1 показаны только две рабочие станции, понятно, что поддерживается и может быть реализовано любое количество рабочих станций или пользовательских интерфейсов.
[0066] Кроме того, определенные варианты осуществления описаны здесь, как включающие логическую схему или множество компонентов, модулей или механизмов. Модули могут представлять собой либо модули программного обеспечения (например, код, реализованный на машиночитаемом носителе или в сигнале передачи) или аппаратные модули. Аппаратный модуль представляет собой материальный блок, способный выполнять определенные действия, и может быть конфигурирован или скомпонован определенным способом. В вариантах осуществления одна или больше компьютерных систем (например, автономная, клиентская или клиентская или серверная компьютерная система) или один или больше аппаратных модулей компьютерной системы (например, процессор или группа процессоров) могут быть конфигурированы с помощью программного обеспечения (например, приложения или части приложения) как аппаратный модуль, который действует для выполнения определенных операций, как описано в настоящем документе.
[0067] В различных вариантах осуществления аппаратный модуль может быть выполнен как механический или электронный. Например, аппаратный модуль может содержать выделенную схему или логическую схему, которая сконфигурирована на постоянной основе (например, как процессор специального назначения, такой как программируемая пользователем вентильная матрица (FPGA) или специализированная интегральная схема (ASIC)) для выполнения определенных операций. Аппаратный модуль может также содержать программируемую логику или схему (например, как входящую в универсальный процессор или другой программируемый процессор), которая временно конфигурирована с помощью программного обеспечения для выполнения определенных операций. Должно быть понятно, что решение для реализации аппаратного модуля механическим путем, в выделенной и конфигурированной на постоянной основе схеме, или во временно конфигурированной схеме (например, конфигурированной с помощью программного обеспечения), может быть вызвано соображениями стоимости и времени.
[0068] Соответственно, термин «аппаратный» следует понимать, как охватывающий материальный объект, будь то объект, который физически построен, конфигурирован на постоянной основе (например, аппаратно реализован), или временно конфигурирован (например, запрограммирован) для работы в определенном режиме или для выполнения определенных операций, описанных в настоящем документе. Рассматривая варианты осуществления, в которых аппаратные модули временно конфигурированы (например, запрограммированы), каждый из аппаратных модулей не нуждается в конфигурировании или обработке в любой момент времени. Например, когда аппаратные модули содержат универсальный процессор, конфигурированный, используя программное обеспечение, универсальный процессор может быть конфигурирован как соответствующие различные аппаратные модули в разное время. Программное обеспечение может соответствующим образом конфигурировать процессор, например, чтобы составлять отдельный аппаратный модуль в один момент времени, и чтобы составлять другой аппаратный модуль в другой момент времени.
[0069] Аппаратные и программные модули могут представлять информацию в другие аппаратные и/или программные модули и принимать информацию от них. Соответственно, описанные аппаратные модули можно рассматривать как соединенные коммуникативно. Если множество таких аппаратных или программных модулей существует одновременно, сообщение может осуществляться путем передачи сигнала (например, по соответствующим схемам и шинам), которые соединяют аппаратные и программные модули. В вариантах осуществления, в которых множество аппаратных модулей или программ конфигурированы или подвергнуты обработке в разные моменты времени, сообщение между такими аппаратными или программными модулями может осуществляться, например, путем сохранения и извлечения информации в структурах памяти, к которым имеет доступ множество аппаратных или программных модулей. Например, один аппаратный или программный модуль может выполнять операцию и сохранять выходные данные этой операции в запоминающем устройстве, с которым он соединен коммуникативно. Дальнейший аппаратный или программный модуль может затем, в более позднее время, получать доступ к запоминающему устройству для извлечения и обработки сохраненных выходных данных. Аппаратные и программные модули могут также инициировать сообщение с устройствами ввода или вывода и могут работать на ресурсе (например, сбор данных).
[0070] Различные операции примеров способов, описанных в настоящем документе, могут быть выполнены, по меньшей мере частично, с помощью одного или больше процессоров, которые временно конфигурированы (например, с помощью программного обеспечения) или конфигурированы на постоянной основе для выполнения соответствующих операций. Будучи конфигурированными либо временно, или на постоянной основе, такие процессоры могут представлять собой реализованные в процессоре модули, которые работают, чтобы выполнять одну или больше операций или функций. Упоминаемые здесь модули могут в некоторых вариантах осуществления содержать реализованные в процессоре модули.
[0071] Аналогично, описанные здесь способы или подпрограммы могут быть по меньшей мере частично реализованными в процессоре. Например, по меньшей мере некоторые из операций способа могут быть выполнены с помощью одного из процессоров или реализованных в процессоре аппаратных модулей. Выполнение определенных операций может быть распределено между одним или больше процессоров, не только пребывающих в одном компьютере, но развернутых на ряде вычислительных машин. В некоторых вариантах осуществления процессор или процессоры могут быть расположены в одном месте (например, в среде установки, офисной среде, или в качестве группы серверов), тогда как другие в других вариантах осуществления процессоры могут быть распределены по ряду местоположений.
[0072] Один или больше процессоров могут также действовать для поддержки выполнения соответствующих операций в среде «облачных вычислений или в виде «программное обеспечение как услуга» (SaaS). Например, по меньшей мере некоторые из операций могут быть выполнены группой компьютеров (как примеры вычислительных машин, содержащих процессоры), эти операции доступны через сеть (например, Интернет) и через один или больше соответствующих интерфейсов (например, интерфейсы прикладных программ (APIs)).
[0073] Выполнение определенных операций может быть распределено между одним или больше процессоров, не только пребывающих в одном компьютере, но развернутых на ряде вычислительных машин. В некоторых вариантах осуществления один или больше процессоров или реализованных в процессоре модулей могут быть расположены в одном географическом местоположении (например, в среде установки или офиса). В других вариантах осуществления один или больше процессоров или реализованных в процессоре модулей могут быть распределены по ряду географических местоположений.
[0074] Некоторые части настоящего описания представлены в терминах алгоритмов или символических представлений операций с данными, сохраненными как биты или двоичные цифровые сигналы в памяти вычислительной машины (например, памяти компьютера). Эти алгоритмы или символические представления являются примерами методов, обычно используемых специалистами в области обработки данных, чтобы передать сущность их работы другим специалистам в данной области. Используемые здесь «алгоритм» или «подпрограмма» представляют собой самосогласованную последовательность операций или аналогичную обработку, ведущую к желаемому результату. В настоящем контексте алгоритмы, подпрограммы и операции включают в себя физические манипуляции с физическими величинами. Как правило, но не обязательно, такие величины могут принимать вид электрических, магнитных или оптических сигналов, которые могут быть сохранены, доступны, переданы, объединены, сравнены или иным образом обработаны с помощью вычислительной машины. Удобно время от времени, главным образом, из соображений обычного использования называть такие сигналы, используя такие слова как «данные, «содержание» «биты», «значения», «элементы», «символы», «знаки», «термины», «числа», «цифры» и т.п. Однако эти слова являются просто удобными ярлыками и должны быть связаны с соответствующими физическими величинами.
[0075] Если специально не указано иное, описание в настоящем документе с использованием таких слов как «обработка», «вычисление», «расчет», «определение», «представление», «отображение» или других может относиться к действиям или процессам вычислительной машины (например, компьютера), которая манипулирует или преобразует данные, представленные как физические (например, электронные, магнитные или оптические) величины в одном или больше запоминающих устройств (например, энергозависимой памяти, энергонезависимой памяти, или их сочетании), регистрах, или других компонентах вычислительной машины, которая принимает, сохраняет, передает или отображает информацию.
[0076] Используемая в настоящем документе ссылка на «один вариант осуществления» или «вариант осуществления» означает, что конкретный элемент, признак, структура или характеристика, описанная в связи с вариантом осуществления, включена по меньшей мере в один вариант осуществления. Появление фразы «в одном варианте» в различных местах описания не обязательно относится к одному и тому же варианту осуществления.
[0077] Некоторые варианты осуществления могут быть описаны с использованием выражений «соединенный» и «связанный» вместе с их производными. Например, некоторые варианты осуществления могут быть описаны с использованием термина «соединенный», чтобы указать, что два или больше элементов находятся в непосредственном физическом или электрическом контакте. Однако термин «соединенный» может также означать, что два или больше элементов не находятся в прямом контакте друг с другом, но тем не менее по-прежнему совместно действуют или взаимодействуют друг с другом. Варианты осуществления не ограничены этим контекстом.
[0078] Использованные здесь термины «содержит», «содержащий», «включает в себя», «включающий в себя», «имеет», «имеющий» или любые другие их варианты предназначены для охвата неисключительного включения. Например, процесс, способ, изделие или устройство, которое содержит перечень элементов, не обязательно ограничен только этими элементами, но может содержать другие элементы, не явно перечисленные или присущие такому процессу, способу, изделию или устройству. Кроме того, если явно не указано противоположное, «или» относится у включающему «или», а не к исключающему «или». Например, условие А или В удовлетворяется одним из следующих положений: А является истинным (или присутствует), а В является ошибочным (или не присутствует), А является ошибочным (или не присутствует), а В является истинным (или присутствует), и как А, таки и В являются истинными (или присутствуют).
[0079] Кроме того, использование неопределенных артиклей "а" и "an" используется здесь для описания элементов и компонентов вариантов осуществления. Это делается просто для удобства, и чтобы дать общее представление описания. Настоящее описание следует понимать как включающее один или по меньшей мере один, и единственное число также включает множественное число, если только не очевидно, что это означает иное.
[0080] Кроме того, только с целью иллюстрации на чертежах изображены предпочтительные варианты осуществления системы подтверждения для периферийного устройства в системе управления. Специалисту в данной области из выше изложенного должно быть понятно, что альтернативные варианты осуществления структур и способов, показанных в настоящем документе, могут быть использованы без отступления от описанных здесь принципов.
Реферат
Представлена система регулирования уровня жидкости в технологической установке. Система регулирования уровня жидкости содержит: подвижный узел, содержащий стержень, при этом стержень подвижного узла включает в себя ближний конец и дальний конец; поплавок, прикрепленный к дальнему концу стержня; приводной механизм, функционально связанный с подвижным узлом; процессор, связанный с приводным механизмом и выполненный с возможностью перемещения поплавка с помощью подвижного узла; датчик, содержащий вход и выход, причем вход датчика функционально связан с подвижным узлом для приема входного сигнала, представляющего характеристику поплавка или рабочей среды, а выход датчика функционально связан с процессором для создания выходного сигнала, связанного с входным сигналом; запоминающее устройство, связанное с процессором; приводящий в действие модуль, сохраненный в запоминающем устройстве, который, будучи выполняемым в процессоре, приводит в действие приводной механизм; устройство вывода данных, соединенное с процессором, и демонстрирующий модуль, сохраненный в запоминающем устройстве, который, будучи выполняемым в процессоре, демонстрирует выходной сигнал датчика на устройстве вывода данных. Технический результат – упрощение конструкции и повышение надежности. 4 н. и 28 з.п. ф-лы, 5 ил.
Комментарии