Системы и способы для мониторинга высоты выемки и объема материала, вынимаемого для горной машины - RU2718888C2
Код документа: RU2718888C2
Чертежи









Описание
Перекрестные ссылки на родственные заявки
[0001] Данная заявка притязает на приоритет предварительной заявки на патент (США) № 62/199550, поданной 31 июля 2015 года, содержимое которой полностью содержится в данном документе по ссылке.
Область техники, к которой относится изобретение
[0002] Варианты осуществления настоящего изобретения относятся к системам и способам для мониторинга высоты и объема выемки материала, вынимаемого в подземных окружениях непрерывной добычи.
Уровень техники
[0003] Горные машины, к примеру, горные машины непрерывной добычи, используются для того, чтобы извлекать материал (например, уголь) из подземных шахт, например, шахт с камерно-столбовой системой разработки. Горная машина непрерывной добычи извлекает уголь из стенки шахты с использованием смонтированного на стреле-манипуляторе вращающегося режущего барабана, который перемещается с вертикальным сдвигающим (т.е. вверх и вниз) движением в то время, когда машина продвигается внутрь стенки шахты. По мере того, как сдвигающее движение извлекает уголь, конвейер на горной машине непрерывной добычи работает с возможностью перемещать уголь к задней стороне машины и в угольные вагонетки. Горная машина непрерывной добычи работает с возможностью проводить последовательность врубов в угольном пласте.
Сущность изобретения
[0004] Мониторинг высоты и объема выемки материала, вынимаемого из вруба, предоставляет данные, которые могут использоваться для того, чтобы изменять целевые показатели горных работ, идентифицировать возможности профессионального обучения операторов, менять горные работы таким образом, чтобы уменьшать износ добывающего оборудования, уменьшать затраты в силу избыточной выемки и т.п. Соответственно, варианты осуществления изобретения предоставляют способы и системы для автоматизированного мониторинга высоты и объема выемки материала, вынимаемого в подземных окружениях непрерывной добычи.
[0005] Один вариант осуществления предоставляет способ для мониторинга горной машины, включающей в себя электронный контроллер. Способ включает в себя работу горной машины таким образом, чтобы врубаться в забой с использованием сдвигающего движения во множестве местоположений вруба. Способ включает в себя прием, с помощью электронного контроллера из датчика высоты стрелы-манипулятора, данных высоты стрелы-манипулятора. Способ включает в себя прием данных потребления мощности для электромотора режущего барабана. Способ включает в себя определение времени начала вруба на основе времени запуска электромотора конвейера. Способ включает в себя определение времени остановки электромотора конвейера. Способ включает в себя определение того, возникает или нет перебазирование. Способ включает в себя определение времени окончания вруба на основе времени остановки электромотора конвейера и перебазирования, когда возникает перебазирование. Способ включает в себя сохранение, в запоминающем устройстве, соединенном с электронным процессором, времени начала вруба, времени окончания вруба, данных высоты стрелы-манипулятора и данных потребления мощности, когда возникает перебазирование. Способ включает в себя регулирование работы горной машины на основе времени начала вруба, времени окончания вруба, данных высоты стрелы-манипулятора и данных потребления мощности, по меньшей мере, для одного из множества местоположений вруба.
[0006] В другом варианте осуществления, способ включает в себя сортировку данных высоты стрелы-манипулятора и данных потребления мощности во множество элементов выборки. Способ включает в себя определение множества высот выемки, причем каждая из множества высот выемки основана на одном из множества элементов выборки. Способ включает в себя определение поднабора высот выемки на основе множества высот выемки и порогового значения высоты выемки. Способ включает в себя определение средней высоты выемки для местоположения вруба на основе поднабора высот выемки и сохранение, в запоминающем устройстве, средней высоты выемки.
[0007] Другой вариант осуществления предоставляет горную машину. Горная машина включает в себя режущий барабан, включающий в себя электромотор режущего барабана; датчик высоты стрелы-манипулятора; запоминающее устройство; и электронный контроллер, соединенный с датчиком высоты стрелы-манипулятора, электромотором режущего барабана и запоминающим устройством. Электронный контроллер выполнен с возможностью проводить работу горной машины таким образом, чтобы врубаться в забой с помощью режущего барабана со сдвигающим движением во множестве местоположений вруба. Электронный контроллер выполнен с возможностью принимать, из датчика высоты стрелы-манипулятора, данные высоты стрелы-манипулятора. Электронный контроллер выполнен с возможностью принимать данные потребления мощности для электромотора режущего барабана. Электронный контроллер выполнен с возможностью определять время начала вруба на основе времени запуска электромотора конвейера и времени остановки электромотора конвейера. Электронный контроллер выполнен с возможностью определять то, возникает или нет перебазирование. Электронный контроллер выполнен с возможностью, когда возникает перебазирование: определять время окончания вруба на основе времени остановки электромотора конвейера и перебазирования и сохранять, в запоминающем устройстве, соединенном с электронным процессором, время начала вруба, время окончания вруба, данные высоты стрелы-манипулятора и данные потребления мощности. Электронный контроллер выполнен с возможностью регулировать работу горной машины на основе времени начала вруба, времени окончания вруба, данных высоты стрелы-манипулятора и данных потребления мощности, по меньшей мере, для одного из множества местоположений вруба.
[0008] Другие аспекты изобретения должны становиться очевидными при рассмотрении подробного описания и прилагаемых чертежей.
Краткое описание чертежей
[0009] Фиг. 1A и фиг. 1B иллюстрируют горную машину непрерывной добычи согласно некоторым вариантам осуществления.
[0010] Фиг. 2 схематично иллюстрирует систему управления для горной машины непрерывной добычи по фиг. 1 согласно некоторым вариантам осуществления.
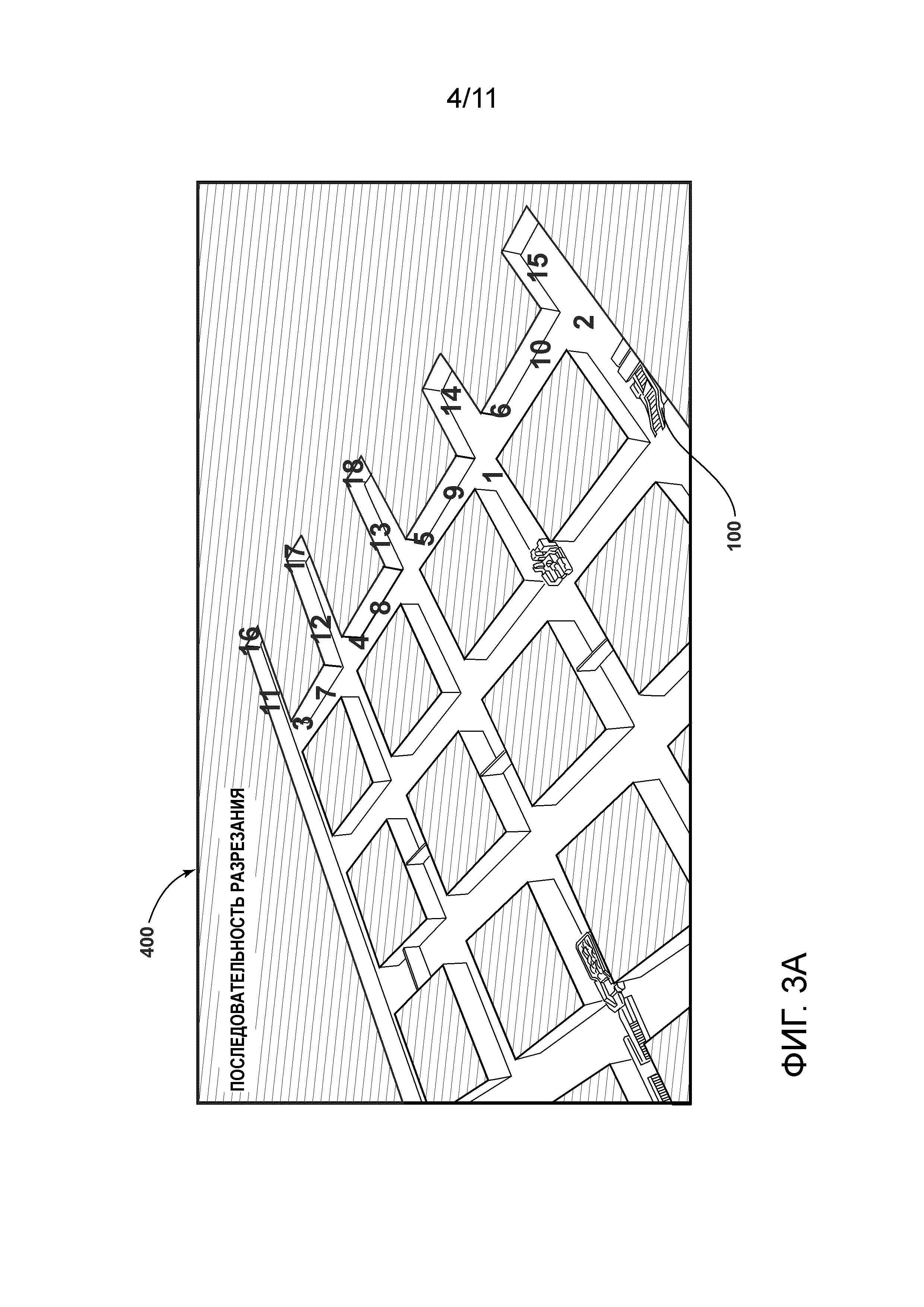
[0011] Фиг. 3A, фиг. 3B и фиг. 3C иллюстрируют горную машину непрерывной добычи, работающую в шахте с камерно-столбовой системой разработки согласно некоторым вариантам осуществления.
[0012] Фиг. 4 является блок-схемой последовательности операций, иллюстрирующей способ для нахождения времен начала и окончания операции в местоположении вруба для горной машины непрерывной добычи по фиг. 1 согласно некоторым вариантам осуществления.
[0013] Фиг. 5 является блок-схемой последовательности операций, иллюстрирующей способ для определения средней выемки в расчете на местоположение вруба для горной машины непрерывной добычи по фиг. 1 согласно некоторым вариантам осуществления.
[0014] Фиг. 6 является диаграммой, иллюстрирующей высоту режущей стрелы-манипулятора во времени согласно некоторым вариантам осуществления.
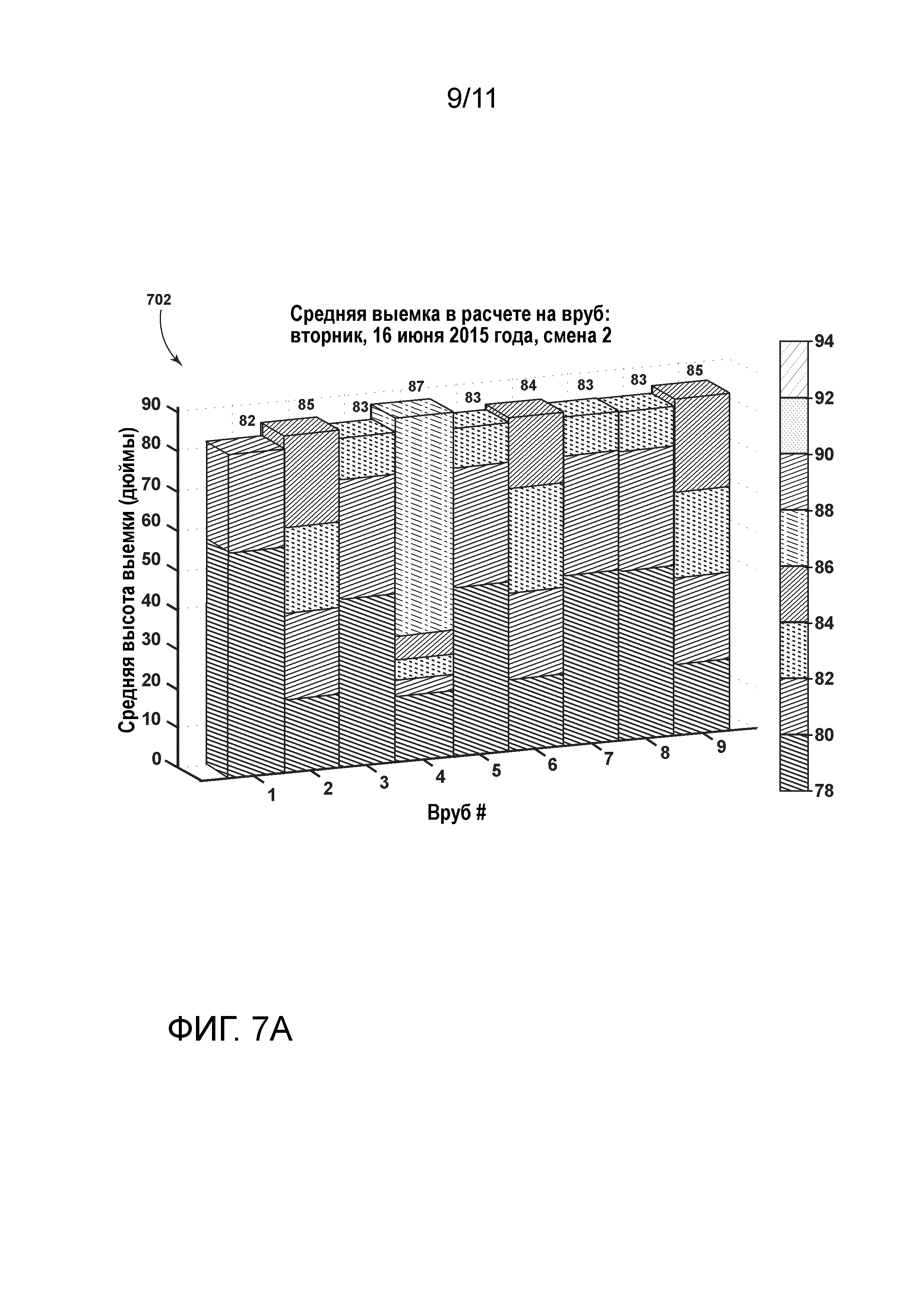
[0015] Фиг. 7A является диаграммой, иллюстрирующей среднюю высоту выемки для последовательности врубов, проведенных посредством горной машины непрерывной добычи согласно некоторым вариантам осуществления.
[0016] Фиг. 7B является диаграммой, иллюстрирующей базовые данные из диаграммы по фиг. 7A согласно некоторым вариантам осуществления.
[0017] Фиг. 8 является диаграммой, иллюстрирующей среднюю выемку в час для горной машины непрерывной добычи согласно некоторым вариантам осуществления.
Подробное описание изобретения
[0018] Перед подробным описанием различных вариантов осуществления следует понимать, что изобретение не ограничено при применении подробностями конструкции и размещения компонентов, изложенными в нижеприведенном описании или проиллюстрированными на прилагаемых чертежах. Изобретение допускает другие варианты осуществления и может быть применено на практике или выполнено различными способами. Кроме того, следует понимать, что формулировки и терминология, используемые в данном документе, служат только для описания и не должны рассматриваться как ограничивающие. Использование "включающий в себя", "содержащий" или "имеющий" и их вариантов имеет намерение содержать в себе элементы, перечисляемые далее, и их эквиваленты, а также дополнительные элементы. Термины "смонтированный", "соединенный (connected)" и "соединенный (coupled)" используются в широком смысле и охватывают прямой и косвенный монтаж, соединение (connection) или соединение (coupling). Дополнительно, "соединенный (connected)" и "соединенный (coupled)" не ограничены физическими или механическими соединениями (connection) или соединениями (coupling) и могут включать в себя электрические соединения (connection) или соединения (coupling), прямые или косвенные. Кроме того, электронная связь и уведомления могут выполняться с использованием любого известного средства, включающего в себя прямые соединения, беспроводные соединения и т.д.
[0019] Также следует отметить, что множество аппаратных и программных устройств, а также множество различных конструктивных компонентов может использоваться для того, чтобы реализовывать изобретение. Помимо этого, следует понимать, что варианты осуществления изобретения могут включать в себя аппаратные средства, программное обеспечение и электронные компоненты или модули, которые, для целей пояснения, могут быть проиллюстрированы и описаны, как если большинство компонентов реализовано исключительно в аппаратных средствах. Тем не менее, специалисты в данной области техники на основе прочтения данного подробного описания должны признавать, что, по меньшей мере, в одном варианте осуществления, электронные аспекты изобретения могут реализовываться в программном обеспечении (т.е. сохраняться на энергонезависимом машиночитаемом носителе), выполняемом посредством одного или более электронных процессоров. Кроме того, как описано в последующих абзацах, конкретные механические конфигурации, проиллюстрированные на чертежах, имеют намерение примерно иллюстрировать варианты осуществления изобретения, и возможны другие альтернативные механические конфигурации. Кроме того, "контроллеры", приведенные в подробном описании, могут включать в себя компоненты обработки, такие как один или более электронных процессоров (например, микропроцессоров, процессоров цифровых сигналов (DSP), программируемых пользователем вентильных матриц (FPGA), специализированных интегральных схем (ASIC) и т.п.), энергонезависимых машиночитаемых запоминающих устройств, интерфейсов ввода-вывода и различных соединений (например, системную шину), соединяющих компоненты.
[0020] Фиг. 1A и фиг. 1B иллюстрируют примерную горную машину 100 непрерывной добычи. В качестве примера, горная машина 100 непрерывной добычи описывается в данном документе как добывающая уголь. В альтернативных вариантах осуществления, горная машина 100 непрерывной добычи может использоваться для того, чтобы добывать другие вещества. Горная машина непрерывной добычи включает в себя режущую стрелу-манипулятор 102, режущий барабан 104, конвейер 106 и систему 108 откатывания. Режущий барабан включает в себя подходящие режущие долота 110, чтобы отрывать или выдалбливать уголь из забоя (не показан) по мере того, как горная машина 100 непрерывной добычи продвигается внутрь забоя, в то время как режущий барабан вращается посредством электромотора 112 режущего барабана (схематично проиллюстрирован на фиг. 2). Конвейер 106 управляется посредством электромотора 114 конвейера (схематично проиллюстрирован на фиг. 2) таким образом, чтобы перемещать уголь из режущего барабана 104 к задней стороне горной машины 100 непрерывной добычи в ходе добычи.
[0021] Система 108 откатывания включает в себя гусеничную цепь на каждой стороне горной машины 100 непрерывной добычи, которая может независимо управляться таким образом, чтобы работать на идентичных или различных скоростях. Когда гусеничные цепи задаются с идентичной скоростью и направлением, система 108 откатывания перемещает горную машину 100 непрерывной добычи прямо в одном направлении. Система 108 откатывания может перемещать горную машину 100 непрерывной добычи влево или вправо в зависимости от того, увеличивается или уменьшается скорость гусеничных цепей. Например, если скорость правой гусеничной цепи снижается таким образом, что она меньше скорости левой гусеничной цепи, левая гусеничная цепь перемещается быстрее, что заставляет горную машину 100 непрерывной добычи поворачивать вправо. Соответственно, система 108 откатывания работает с возможностью откатывать (т.е. перемещать) горную машину 100 непрерывной добычи в окружении добычи.
[0022] Фиг. 2 схематично иллюстрирует примерную систему 200 управления, а также некоторые элементы горной машины 100 непрерывной добычи. Система 200 управления включает в себя электронный контроллер 202, датчик 204 высоты стрелы-манипулятора, датчик 205 мощности, компьютер 206 управления отображением, сервер 208 и базу 210 данных. Компоненты системы 200 управления функционально соединяются посредством одной или более шин управления или данных либо комбинации вышеозначенного. Компоненты системы 200 управления могут обмениваться данными по проводным соединениям, беспроводным соединениям либо комбинации вышеозначенного. Вариант осуществления, проиллюстрированный на фиг. 2, предоставляется просто в качестве одного примера; система 200 управления может включать в себя большее, меньшее число компонентов или компоненты, отличные от проиллюстрированных компонентов.
[0023] Электронный контроллер 202 включает в себя электронный процессор 212 (например, микропроцессор или другой электронный контроллер), запоминающее устройство 214 и интерфейс 216 ввода-вывода. Электронный процессор 212 выполнен с возможностью извлекать инструкции и данные из запоминающего устройства 214 и выполнять, в числе прочего, инструкции для того, чтобы осуществлять способы, описанные в данном документе, включающие в себя способы 400 и 500 либо их части. Запоминающее устройство 214 может включать в себя постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), другие энергонезависимые машиночитаемые носители либо комбинацию вышеозначенного. Интерфейс 216 ввода-вывода принимает информацию и отправляет информацию в компоненты и устройства за пределами электронного контроллера 202. Например, интерфейс 216 ввода-вывода может передавать сигналы, данные, инструкции и запросы в механическое и электрическое оборудование, расположенное за пределами электронного контроллера 202, которое проводит работу и управляет горной машиной 100 непрерывной добычи.
[0024] В одном варианте осуществления, датчик 204 высоты стрелы-манипулятора представляет собой преобразователь, который передает в электронный контроллер 202 данные, связанные с высотой режущей стрелы-манипулятора 102. Датчик 204 высоты стрелы-манипулятора позиционируется и калибруется с возможностью предоставлять информацию позиции для режущей стрелы-манипулятора 102. Датчик 204 высоты стрелы-манипулятора соединяется с электронным контроллером 202, который определяет позицию (например, высоту) стрелы-манипулятора из данных, полученных через датчик 204 высоты стрелы-манипулятора, в то время как режущий барабан 104 сдвигается вверх и вниз. В некоторых вариантах осуществления, данные высоты стрелы-манипулятора калибруются с использованием данных из других датчиков на горной машине 100 непрерывной добычи, включающих в себя, например, датчики угла поворота шасси.
[0025] Датчик 205 мощности представляет собой датчик (например, преобразователь), соединенный с электронным контроллером 202. Датчик 205 мощности позиционируется и калибруется с возможностью предоставлять данные потребления мощности для компонента горной машины 100 непрерывной добычи, причем эти данные могут использоваться для того, чтобы указывать, когда горная машина 100 непрерывной добычи используется для того, чтобы извлекать материал. Например, электронный контроллер 202 может формировать данные потребления мощности для электромотора 112 режущего барабана с использованием датчика 205 мощности (например, датчика тока или датчика напряжения). Как указано ниже, уровень потребления мощности выше порогового значения указывает то, что электромотор 112 режущего барабана вращает режущий барабан 104 таким образом, чтобы вынимать материал из местоположения вруба, вместо вращения режущего барабана 105 в то время, когда он не контактирует с забоем.
[0026] Компьютер 206 управления отображением предоставляет человеко-машинный интерфейс (HMI) для системы 200 управления. В одном примере, компьютер 206 управления отображением представляет собой компьютер, имеющий устройства для того, чтобы принимать ввод от оператора (например, клавиатуру, мышь или сенсорный экран), и устройства для того, чтобы предоставлять вывод в оператора (например, один или более экранов отображения). В других вариантах осуществления, компьютер 206 управления отображением может представлять собой мобильное вычислительное устройство (например, смартфон или планшетный компьютер) или другое электронное устройство, допускающее работу, как описано в данном документе. Компьютер 206 управления отображением и электронный контроллер 202 электрически подключены и обмениваются данными в электронном виде с использованием одного или более сетевых протоколов, включающих в себя, например, TCP/IP, UDP, протокол диспетчерского управления и сбора данных (SCADA) и OLE для управления технологическими процессами (OPC). Электронный контроллер 202 передает события, сигналы тревоги и данные датчиков, связанные с горной машиной 100 непрерывной добычи, в компьютер 206 управления отображением. Компьютер 206 управления отображением сохраняет эту информацию в одной или более структур запоминающего устройства.
[0027] Система 200 управления либо ее части могут быть включены в горную машину 100 непрерывной добычи либо могут быть удаленными относительно горной машины 100 непрерывной добычи. Например, некоторые компоненты системы 200 управления могут быть расположены на поверхности, тогда как некоторые могут быть расположены под землей. В проиллюстрированном варианте осуществления, поверхностная часть системы 200 управления включает в себя сервер 208, который функционально соединяется с компьютером 206 управления отображением. Сервер 208 и компьютер 206 управления отображением обмениваются данными в электронном виде с использованием одного или более сетевых протоколов, включающих в себя, например, TCP/IP, UDP, протокол диспетчерского управления и сбора данных (SCADA) и OLE для управления технологическими процессами (OPC). Сервер 208 также может подключаться к сети 218 (например, к корпоративной сети или сетям либо к Интернету). Компьютер 206 управления отображением отправляет события, сигналы тревоги и данные датчиков из горной машины на сервер 208. Например, компьютер 206 управления отображением может отправлять данные непосредственно в базу 210 данных (например, базу данных MySQL), соединенную с сервером 208 на поверхности. В другом примере, UDP-пакеты, принятые посредством электронного контроллера 202, преобразуются в OPC-данные и консолидируются в плоские файлы посредством компьютера 206 управления отображением, который отправляет плоские файлы на сервер 208. Плоские файлы могут сохраняться локально (например, в базе 210 данных) или отправляться в удаленную базу данных.
[0028] Как проиллюстрировано, электронный контроллер 202 соединяется с электромотором 112 режущего барабана, электромотором 114 конвейера и системой 108 откатывания. Электронный контроллер 202 отправляет и принимает управляющие данные и данные о состоянии в/из электромотора 112 режущего барабана, электромотора 114 конвейера и системы 108 откатывания. Например, электронный контроллер 202 может принимать данные из системы 108 откатывания, указывающие скорость и направление гусеничных цепей. В другом примере, электронный контроллер 202 принимает данные, указывающие то, работает либо нет электромотор 112 режущего барабана или электромотор 114 конвейера.
[0029] Фиг. 3A, фиг. 3B и фиг. 3C иллюстрируют пример горной машины 100 непрерывной добычи, работающей в шахте 300 с камерно-столбовой системой разработки. На фиг. 3B, горная машина 100 непрерывной добычи работает с возможностью извлекать уголь из забоя посредством продвижения внутрь забоя при сдвиге. Сдвиг является повторяющимся перемещением режущей стрелы-манипулятора 102 из нижней позиции, как показано на фиг. 1A, в верхнюю позицию, как показано на фиг. 1B, или наоборот. В ходе сдвига, вертикальное расстояние между наименьшей высотой и наибольшей высотой, из которой материал извлекается посредством режущего барабана 104, известно как высота выемки. Режущий барабан 104 вращается посредством электромотора 112 режущего барабана и извлекает уголь из забоя. Конвейер 106 приводится в действие посредством электромотора 114 конвейера, чтобы перемещать уголь из режущего барабана 104 к задней стороне горной машины 100 непрерывной добычи в угольную вагонетку 302. Электромотор 112 режущего барабана и электромотор 114 конвейера известны как добывающие электромоторы. Когда добывающий электромотор работает, горная машина 100 непрерывной добычи работает (т.е. добывает уголь). В альтернативных вариантах осуществления, другие конфигурации электромотора могут указывать добычу.
[0030] Как проиллюстрировано на фиг. 3A, горная машина 100 непрерывной добычи добывает уголь посредством проведения врубов в местоположениях 1-18 вруба. Вруб представляет собой работу горной машины 100 непрерывной добычи для того, чтобы извлекать уголь из местоположения вруба. Вруб проводится за два прохода. Фиг. 3B иллюстрирует горную машину 100 непрерывной добычи, проводящую первую половину вруба в местоположении вруба. Когда первая половина вруба проведена, горная машина 100 непрерывной добычи выезжает задним ходом из местоположения вруба с использованием системы 108 откатывания и "доворачивает". Доворачивание выравнивает горную машину 100 непрерывной добычи таким образом, чтобы проводить вторую половину вруба (т.е. вруб в первый слой породы). Фиг. 3C иллюстрирует горную машину 100 непрерывной добычи, готовящуюся проводить вруб в первый слой породы. Когда горная машина 100 непрерывной добычи завершает вруб, она выполняет перебазирование (т.е. она перемещается в следующее местоположение вруба). Возвращаясь к фиг. 3A, через последовательность врубов, доворачиваний и перебазирований, горная машина 100 непрерывной добычи проводит врубы в местоположениях 1-18 вруба, извлекая уголь из угольного пласта и оставляя столбы в шахте, чтобы формировать шахту 300 с камерно-столбовой системой разработки. Вследствие ряда факторов (например, дисперсии в структуре угольного пласта, различных технологий, используемых посредством горнодобывающих операторов, технического обслуживания машин и т.п.), время, которое требуется на то, чтобы проводить вруб, может варьироваться для каждого местоположения вруба. Количество угля, вынимаемого из вруба, может определяться с использованием высоты выемки и времени вруба (например, определяться из времен начала и окончания для операции вруба), которые, в свою очередь, могут использоваться для того, чтобы изменять работу горной машины 100 непрерывной добычи.
[0031] Фиг. 4 иллюстрирует примерный способ 400 для определения посредством электронного контроллера 202 времен начала и окончания операции в местоположении вруба. Следует отметить, что способ 400 может осуществляться с использованием контроллеров, отличных от электронного контроллера 202. Способ 400 начинается, когда горная машина 100 непрерывной добычи позиционируется перед забоем для вруба (т.е. в местоположении вруба). На этапе 401, запускается добывающий электромотор. Например, электромотор 114 конвейера начинает передачу сигналов в отношении того, что первая угольная вагонетка поднята сзади горной машины 100 непрерывной добычи и готова к загрузке углем. Соответственно, время начала вруба определяется от первого времени, когда электромотор 114 конвейера включается (т.е. от времени запуска электромотора конвейера) после того, как горная машина 100 непрерывной добычи позиционируется на режущей поверхности. На этапе 402, время, когда электромотор 114 конвейера включается, регистрируется (например, записывается в запоминающее устройство 214) в качестве времени начала вруба.
[0032] На этапе 403, горная машина 100 непрерывной добычи начинает или продолжает работать с возможностью проводить вруб посредством работы со сдвигающим движением при одновременном продвижении внутрь угольного пласта. В то время, когда горная машина 100 непрерывной добычи работает с возможностью проводить вруб, электронный контроллер 202 формирует данные высоты стрелы-манипулятора с использованием сигналов, принимаемых из датчика 204 высоты стрелы-манипулятора. Данные высоты стрелы-манипулятора представляют высоту стрелы-манипулятора 102 по мере того, как сдвигающая операция перемещает режущий барабан 104 вверх и вниз по угольному пласту (т.е. по забою). Например, фиг. 6 иллюстрирует диаграмму 600, которая включает в себя линию 602 тренда, иллюстрирующую высоту стрелы-манипулятора во времени. В некоторых вариантах осуществления, данные высоты стрелы-манипулятора могут формироваться посредством использования дополнительных датчиков (например, датчика угла поворота шасси).
[0033] В то время, когда горная машина 100 непрерывной добычи работает с возможностью проводить вруб, электронный контроллер 202 также формирует данные потребления мощности. В некоторых вариантах осуществления, данные потребления мощности служат для электромотора 112 режущего барабана (например, число ампер, потребленных посредством электромотора 112 режущего барабана). В таких вариантах осуществления, данные потребления мощности могут формироваться с использованием сигналов, принимаемых из датчика 205 мощности, данные могут приниматься из электромотора 112 режущего барабана непосредственно (например, из датчиков, неразъемных с электромотором) либо могут быть определены посредством электронного контроллера 202 (например, на основе управляющих сигналов, отправленных в электромотор). В других вариантах осуществления, электронный контроллер 202 формирует данные потребления мощности для других типов тяги горной машины 100 непрерывной добычи (например, гидравлической).
[0034] Возвращаясь к фиг. 4, на этапе 404, электронный контроллер 202 определяет то, выключен или нет добывающий электромотор. Когда добывающий электромотор не выключен, счетчики перебазирования (пояснены ниже) сбрасываются, и горная машина 100 непрерывной добычи продолжает работу на этапе 403. Как отмечено выше, время начала вруба регистрируется, когда горная машина 100 непрерывной добычи начинает вруб в местоположении вруба. Когда вруб закончен (т.е. оба прохода выполнены в местоположении вруба), горная машина 100 непрерывной добычи выполняет перебазирование (т.е. перемещение в другое местоположение вруба). Время окончания вруба определяется от последнего времени, когда электромотор 114 конвейера работает до того, как возникает перебазирование (т.е. от времени остановки электромотора конвейера). Чтобы определять время окончания вруба, способ 400 определяет то, возникает или нет перебазирование. В ходе перебазирования, добывающий электромотор выключен, и горная машина 100 непрерывной добычи откатывается (т.е. перемещается) в другое местоположение вруба. Соответственно, на этапе 408 определяется то, откатывается или нет горная машина 100 непрерывной добычи. Когда горная машина 100 непрерывной добычи не откатывается, способ 400 переходит к этапу 403.
[0035] Когда горная машина 100 непрерывной добычи откатывается (например, когда система 108 откатывания работает), счетчики перебазирования запускаются или постепенно увеличиваются на этапе 410. Поскольку добывающий электромотор выключен во время перебазирования, выключение добывающего электромотора может указывать то, что возникает перебазирование. Тем не менее, в ходе вруба, добывающий электромотор может выключаться один или более раз (например, когда горная машина 100 непрерывной добычи "доворачивает", чтобы начинать второй проход, сменять угольные вагонетки, для короткого технического обслуживания и т.д.). Соответственно, один вариант осуществления способа 400 использует счетчики перебазирования, чтобы определять то, возникает или нет перебазирование. Каждый счетчик перебазирования представляет период времени, в течение которого состояние или работа машины присутствует или возникает. Для каждого счетчика перебазирования определяется пороговое значение. Когда пороговое значение счетчика перебазирования удовлетворяется, это указывает то, что возникает возможное перебазирование. Счетчики перебазирования включают в себя, например, пороговое время перебазирования (например, количество времени, которое горная машина 100 непрерывной добычи находится в состоянии перебазирования), контрольное время откатывания с перебазированием (например, количество времени откатывания, которое должно быть накоплено для того, чтобы перемещение считалось фактическим перебазированием) и контрольное время ожидания перебазирования (например, количество времени, которое горная машина 100 непрерывной добычи может бездействовать (т.е. не выполнять забивку) после инициирования счетчиков перебазирования перед проверкой того, возникает или нет перебазирование фактически).
[0036] На этапе 412, счетчики перебазирования проверяются, чтобы определять то, удовлетворяют или нет какие-либо из них соответствующим пороговым значениям. Когда пороговое значение счетчиков перебазирования удовлетворяется, возможное перебазирование регистрируется на этапе 414. Когда пороговое значение не удовлетворяется, электронный контроллер 202 определяет то, поворачивает или нет горная машина 100 непрерывной добычи, на этапе 416. Чтобы определять то, поворачивает или нет горная машина 100 непрерывной добычи в данный момент, следующее уравнение может использоваться для того, чтобы определять то, насколько машина поворачивает в этот момент:
%Deg/Sec=(RHTramSpeed/TrackDist-LHTramSpeed/TrackDist)*360/2,
где RHTramSpeed является скоростью правой гусеничной цепи системы 108 откатывания, LHTramSpeed является скоростью левой гусеничной цепи системы 108 откатывания, и TrackDist является расстоянием от центра горной машины 100 непрерывной добычи до соответствующих гусеничных цепей. %Deg/sec сравнивается с заданной точкой (в градусах), которая, когда удовлетворяется, указывает то, что горная машина 100 непрерывной добычи поворачивает в эту самую секунду.
[0037] Когда горная машина 100 непрерывной добычи не поворачивает, горная машина 100 непрерывной добычи продолжает работу на этапе 403. Когда горная машина 100 непрерывной добычи поворачивает, счетчик гусеничных следов запускается или постепенно увеличивается на этапе 418. На этапе 420, электронный контроллер 202 определяет то, удовлетворяется или нет пороговое значение времени поворачивания с перебазированием (например, количество времени, которое машина должна считаться поворачивающей, чтобы указывать возможное перебазирование). Пороговое значение времени поворачивания с перебазированием задается таким образом, чтобы обнаруживать короткие перемещения горной машины 100 непрерывной добычи (например, выезд задним ходом из одного местоположения вруба и поворот на 90°, чтобы начинать вруб в забой). Такие короткие перемещения указывают перебазирование, но пороговое значение счетчика перебазирования не может удовлетворяться вследствие короткого расстояния между местоположениями вруба. Соответственно, когда пороговое значение времени поворачивания с перебазированием удовлетворяется, возможное перебазирование регистрируется на этапе 414. Когда пороговое значение времени поворачивания с перебазированием не удовлетворяется, горная машина 100 непрерывной добычи продолжает работу на этапе 403.
[0038] Когда возможное перебазирование зарегистрировано на этапе 414, это указывает то, что, возможно, возникает перебазирование. Использование счетчиков перебазирования помогает обеспечивать то, что возникает перебазирование, а не, например, выполнение доворота посредством горной машины 100 непрерывной добычи в идентичном врубе. На этапе 422, электронный контроллер 202 определяет то, удовлетворяется или нет пороговое значение времени работы конвейера. Полное время, которое электромотор конвейера включен между началом и окончанием вычисленного вруба, сравнивается с пороговым временем, которое конвейеры должны быть включены, чтобы обозначать то, что возникает вруб. Когда пороговое значение времени работы конвейера не удовлетворяется, возможное перебазирование определяется как не перебазирование на этапе 424, и горная машина 100 непрерывной добычи продолжает работу на этапе 403.
[0039] Когда пороговое значение времени работы конвейера удовлетворяется, это указывает то, что возникает перебазирование, а не доворот или другое событие. Соответственно, перебазирование регистрируется на этапе 426; счетчики перебазирования сбрасываются на этапе 428; и время окончания вруба регистрируется на этапе 430. Время окончания вруба определяется от последнего времени, когда работает электромотор 114 конвейера до того, как возникает перебазирование, зарегистрированное на этапе 426. Способ 400 переходит к этапу 401, когда добывающий электромотор запускается с тем, чтобы начинать добычу в новом местоположении вруба.
[0040] Количество угля, вынимаемого из врубов, в числе прочего, может определяться с использованием высоты выемки и времен начала и окончания вруба, определенных с использованием способа 400. Фиг. 5 иллюстрирует примерный способ 500 для определения средней выемки в расчете на местоположение вруба. В качестве примера, способ 500 описывается как выполняемый с использованием электронного контроллера 202. Это не должно считаться ограничением. Способ 500 может осуществляться посредством электронного контроллера 202, сервера 208, другого контроллера (не показан) либо комбинации вышеприведенного.
[0041] Способ 500 начинается с извлечения и совмещения данных в течение определенного периода времени (например, дня, смены и т.д.). Данные включают в себя времена начала и окончания вруба, данные высоты стрелы-манипулятора и данные потребления мощности, как описано выше. Данные могут быть извлечены из запоминающего устройства 214, базы 210 данных или из другого машиночитаемого носителя хранения данных, интегрированного или отдельного от горной машины 100 непрерывной добычи. Альтернативные варианты осуществления могут включать в себя большее число или другие источники данных, полезные для определения высоты выемки. Поскольку данные могут исходить из отдельных источников на горной машине 100 непрерывной добычи, могут быть различные числа точек данных для данной переменной в течение идентичного периода времени. Совмещение данных заключает в себе регулирование точек данных на предмет соответствия за анализируемый период времени. Например, электронный контроллер 202 может определять, в течение каждой секунды, точку данных, представляющую высоту стрелы-манипулятора, и точку данных, представляющую потребление мощности за эту секунду (например, число ампер, потребленных посредством электромотора 112 режущего барабана).
[0042] На этапе 504, местоположения вруба определяются для совмещенных данных на основе времен начала вруба и времен окончания вруба, как определено, например, с использованием способа 400. На этапе 506, если местоположения вруба не найдены за анализируемый период времени, электронный контроллер 202 сообщает то, что врубы не найдены, на этапе 508. Например, электронный контроллер 202 может отображать, на компьютере 206 управления отображением, сообщение оператору горной машины 100 непрерывной добычи. На этапе 510, электронный контроллер 202 определяет то, обработаны или нет все найденные местоположения вруба на этапе 506.
[0043] Когда, по меньшей мере, одно местоположение вруба остается, на этапе 512 электронный контроллер 202 определяет данные высоты стрелы-манипулятора и данные потребления мощности для местоположения вруба посредством извлечения данных между временем начала вруба и временем окончания вруба для этого местоположения. На этапе 514, данные, определенные на этапе 512, сортируются в элементы выборки (например, множество элементов выборки). В одном примере, используются тридцатисекундные элементы выборки. В других примерах, могут использоваться меньшие или большие элементы выборки данных. На этапе 516, для каждого элемента выборки данных, максимальная высота стрелы-манипулятора и минимальная высота стрелы-манипулятора определяются из данных высоты стрелы-манипулятора в этом элементе выборки данных. В некоторых вариантах осуществления, чтобы помогать обеспечивать то, что машина проводит добычу в то время, когда стрела-манипулятор перемещается (вместо перемещения стрелы-манипулятора для технического обслуживания или других целей), значение данных потребления мощности, соответствующее каждому из минимальных и максимальных значений высоты, должно удовлетворять пороговому значению. Например, пороговое значение может определяться на основе потребляемой мощности при приведении в действие режущий барабан 104, когда горная машина 100 непрерывной добычи извлекает материал. В одном варианте осуществления, когда число ампер, потребленных посредством электромотора 112 режущего барабана, удовлетворяет пороговому значению (например, 64 ампера), это указывает то, что горная машина 100 непрерывной добычи добывает уголь. Аналогично, когда число потребленных ампер ниже порогового значения, это указывает то, что хотя режущая стрела-манипулятор 102 может сдвигаться, горная машина 100 непрерывной добычи не добывает уголь. Пороговое значение может варьироваться в зависимости от характеристик горной машины 100 непрерывной добычи (например, размера электромотора 112 режущего барабана) и типа тяги, которая приводит в действие режущий барабан 104 (например, электрическая, гидравлическая и т.д.).
[0044] На этапе 518, электронный контроллер 202 определяет множество высот выемки (т.е. по одной высоте выемки для каждого из элементов выборки). Для каждого элемента выборки, следующая формула может использоваться для того, чтобы определять высоту выемки:
Высота выемки=(BHmax-BHmin)+CDdia
где BHmax является максимальной высотой стрелы-манипулятора для элемента выборки, BHmin является минимальной высотой стрелы-манипулятора для элемента выборки, и CDdia является диаметром режущего барабана.
[0045] На этапе 520, средняя высота выемки для местоположения вруба определяется посредством значений высоты выемки для элементов выборки этого местоположения вруба. В некоторых вариантах осуществления, электронный контроллер 202 определяет поднабор высот выемки для местоположения вруба на основе порогового значения высоты выемки. Для каждого элемента выборки, определенная высота выемки сравнивается с предварительно определенной минимальной высотой выемки. Если определенное значение не удовлетворяет предварительно определенному минимуму, то предварительно определенное значение заменяется на NaN (т.е. не число). Поднабор оставшихся определенных значений усредняется, чтобы определять среднюю высоту выемки для местоположения вруба.
[0046] На этапе 522, средняя высота выемки и данные, используемые для того, чтобы определять ее, сохраняется в запоминающем устройстве (например, в запоминающем устройстве 214 или в базе 210 данных). На этапе 510, способ повторяется для каждого местоположения вруба, чтобы определять среднюю высоту выемки для всех местоположений вруба, содержащихся в данных. На этапе 524, когда все местоположения вруба обработаны, электронный процессор выводит графическое представление (например, визуальное представление средней высоты выемки для последовательности местоположений вруба) и таблицу данных, на основе средних высот выемки для местоположений вруба. Например, фиг. 7A иллюстрирует график 702, который иллюстрирует множество параллельных столбцов, которые указывают средние высоты выемки для девяти местоположений вруба. Фиг. 7B иллюстрирует таблицу 704, которая иллюстрирует данные, проиллюстрированные на фиг. 7A, причем эти данные определены с использованием способов 400 и 500. В некоторых вариантах осуществления, времена операции в местоположении вруба и средняя высота выемки могут использоваться для того, чтобы определять объем материала (например, угля), вынимаемого в ходе вруба.
[0047] В некоторых вариантах осуществления, средняя высота выемки для данной единицы времени (например, часа, смены, дня) может определяться и представляться визуально. Например, данные для высоты стрелы-манипулятора и потребления мощности могут извлекаться и совмещаться для времен начала и окончания конкретного периода, к примеру, дня. Как описано выше, данные могут быть сортированы в элементы выборки, и высоты выемки могут определяться, как описано выше. Данные могут восстанавливаться в исходную форму, например, в элементы выборки в один час (т.е. состоять из 120 30-секундных элементов выборки). Для каждого элемента выборки в один час, может определяться средняя высота выемки за каждый час в течение дня. Например, фиг. 8 иллюстрирует график 800, который иллюстрирует среднюю выемку в час в течение нескольких дней.
[0048] Возвращение теперь в фиг. 5, когда данные обработаны, сохранены и сообщены, они могут использоваться для того, чтобы регулировать работу горной машины на этапе 526. Например, сдвигающее движение может регулироваться таким образом, чтобы повышать добычу горной машины 100 непрерывной добычи. В некоторых вариантах осуществления, определяется заданная точка местоположения добычи, и сдвигающая операция регулируется на основе заданной точки. Заданная точка определяется на основе высоты пласта желательного материала (например, угля) и, по меньшей мере, одного горнотехнического состояния. Горнотехническое состояние может представлять собой объем других материалов (например, породы или глины), которые может потребоваться вынимать на площадке шахты. Например, внепластовое разубоживание может уменьшаться посредством регулирования высоты выемки на основе заданной точки, определенной для того, чтобы формировать меньшее разубоживание. Меньшее разубоживание требует меньшей обработки добытого материала. В другом примере, поскольку породы и глина выше и ниже угольного пласта являются более тяжелыми и более абразивными, чем уголь, заданная точка может определяться таким образом, чтобы уменьшать износ добывающего оборудования.
[0049] Заданная точка или оперативное регулирование может определяться на основе других горнотехнических состояний. Например, оседание почвы зачастую компенсируется на основе выемки. Уменьшенная избыточная выемка сокращает эти компенсационные затраты. Кроме того, непотребляемая вырабатываемая порода, вынесенная к поверхности, считается опасным материалом. Устройство долгосрочного или долговременного хранения данных является дорогостоящим. Помимо этого, горное оборудование номинально рассчитано на срок службы на основе накопленных обрабатываемых тонн. Сокращение обработки нетоварного материала повышает общую ценность оборудования. Соответственно, некоторые варианты осуществления уменьшают избыточную выемку посредством регулирования работы горной машины 100 непрерывной добычи.
[0050] В другом примере, средние высоты выемки могут сравниваться между отдельными операторами, чтобы идентифицировать возможности профессионального обучения операторов. Данные выемки также могут сравниваться с другими данными добычи, чтобы определять тренды или корреляции. Шаблоны могут идентифицироваться посредством сравнения данных выемки по оператору, смене или местоположению вруба. Это позволяет идентифицировать возможности профессионального обучения операторов, демонстрировать расхождения между сменами или предоставлять другую аналитическую информацию по выработке шахты, которая до этого была невозможной. Мониторинг выемки обеспечивает возможность представления на основе принципа "наиболее успешная практика". Наилучшие циклы вруба и технологии работы оператора могут вознаграждаться, приводя к более высокой приоритезации относительно внепластового разубоживания.
[0051] Различные признаки и преимущества изобретения излагаются в прилагаемой формуле изобретения.
Реферат
Группа изобретений относится к системе и способу для мониторинга высоты выемки и объема материала, вынимаемого для горной машины. Способ включает этапы, на которых проводят работу горной машины таким образом, чтобы врубаться в забой с использованием сдвигающего движения во множестве местоположений вруба. Для каждого из множества местоположений вруба: формируют, с использованием датчика высоты стрелы-манипулятора, смонтированного на стреле-манипуляторе горной машины, данные высоты стрелы-манипулятора. Формируют, с использованием датчика мощности, данные потребления мощности. Определяют, с помощью электронного контроллера, время начала вруба на основе времени запуска электромотора конвейера, определяют время остановки электромотора конвейера, определяют, возникает или нет перебазирование. Когда возникает перебазирование, определяют время окончания вруба на основе времени остановки электромотора конвейера и перебазирования, сохраняют, в запоминающем устройстве, соединенном с электронным процессором, время начала вруба, время окончания вруба, данные высоты стрелы-манипулятора и данные потребления мощности. Регулируют работу горной машины на основе времени начала вруба, времени окончания вруба, данных высоты стрелы-манипулятора и данных потребления мощности по меньшей мере для одного из множества местоположений вруба. Технический результат заключается в уменьшении износа добывающего оборудования, уменьшении затрат в силу избыточной выемки. 2 н. и 18 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ получения призабойного пространства с применением систем автоматизации
Комментарии