Компактное устройство для измерения скорости и направления вращения объекта и магнитная система для сбора данных - RU2346243C2
Код документа: RU2346243C2
Чертежи









Описание
Область техники
Настоящее изобретение относится к компактному устройству для измерения скорости и направления вращения объекта (3). Упомянутое устройство предназначено для работы в суровых условиях окружающей среды, например, при высоком давлении, при высоких температурах и в присутствии коррозийных флюидов. Оно может найти применение, в частности, в нефтедобывающей промышленности, ядерной энергетике, робототехнике, автомобильных секторах промышленности и т.д.
В нефтедобывающей промышленности выполняется обследование углеводородных продуктивных скважин. Для выполнения этого пытаются собрать с наибольшей возможной точностью определенный объем данных, относящихся к многофазному флюиду, протекающему в скважине. Эти данные относятся, например, к свойствам, скорости потока и пропорциональному составу различных фаз флюида.
В автомобильной отрасли стремятся, например, определить скорость и направление вращения колес транспортного средства для того, чтобы активизировать или сохранить в неактивном состоянии систему антиблокировки колес.
Предшествующий уровень техники
Что касается нефтедобывающей отрасли, в углеводородной продуктивной скважине часто имеется трехфазный поток, состоящий из нефти, газа и воды. Эти жидкие фазы имеют неодинаковую плотность, перемещаются с различными скоростями, присутствуют в разных пропорциях и входят в скважину в разных местоположениях. Распределение разных фаз флюида в потоке не является одинаковым и зависит от того, является ли скважина вертикальной, наклоненной или горизонтальной. В действительности, ввиду различия в плотности различных фаз флюида упомянутые фазы становятся прогрессивно стратифицированными по мере того, как наклон скважины увеличивается. В одной и той же части скважины, которая наклонена или даже является горизонтальной, могут иметь место различные фазы, которые перемещаются с различными скоростями и не всегда в одном и том же направлении.
Для определения свойства флюидных фаз в скважине и их пропорционального соотношения можно использовать оптические датчики и/или резистивные датчики. Можно также использовать измерения радиоактивной способности или плотности.
Для измерения скорости и направления вращения потоков в скважине в ней размещают несколько винтов, причем каждый предназначен для вращения под воздействием потока, в который он погружен. Такой винт объединяют с устройством для измерения скорости и направления вращения, чтобы иметь возможность определения значений этих параметров. Предпочтительным является, чтобы такая комбинация не имела никакого контакта, чтобы избежать нарушения свободного движения винта. При использовании по меньшей мере одного магнита, объединенного с винтом, его вращение генерирует изменение магнитного поля, которое может обнаруживаться одним или более магнитными датчиками. Это изменение магнитного поля представляет скорость и направление вращения винта.
Другое ограничение, которое должно учитываться, заключается в том, что устройство для измерения скорости и направления вращения снабжается множеством проводников для соединения с внешней средой, имеющих по возможности малые размеры.
Действительно, указанное устройство для измерения скорости и направления вращения должно, во-первых, снабжаться энергией, а во-вторых, вырабатывать сигналы, соответствующие измерениям, которые оно выполняет. Источник питания может быть размещен на поверхности или в герметичном корпусе, размещенном в скважине вблизи измерительного устройства. Устройство для обработки сигналов, вырабатываемых измерительным устройством, также размещено в упомянутом корпусе. Таким образом, в указанном корпусе размещается устройство для обработки сигналов, выдаваемых оптическими и/или резистивными датчиками. В корпусе существует давление, отличающееся от давления в скважине, и оно обычно равно атмосферному давлению. Герметизированные каналы должны быть предусмотрены для проводников, которые соединяют датчики и устройство для измерения скорости и направления вращения с устройствами обработки и источником питания. Формирование этих герметизированных каналов всегда является затруднительным, и лучше всего не увеличивать их количество ввиду помех, обуславливаемых ими, и для того, чтобы не вызывать утечки.
В применениях, связанных с ядерной энергетикой, также требуется минимизировать число проводников, связанных с устройством измерения, если указанное устройство измерения размещается в радиоактивном кожухе.
Коммерчески доступны различные типы магнитных измерительных датчиков движения, способных измерять скорость и/или направление вращения. Не входя в детали принципа работы таких датчиков, независимо от того, являются ли они датчиками, основанными на эффекте Холла, магниторезистивными датчиками или супермагниторезистивными датчиками, они могут классифицироваться по двум основным категориям.
Первая категория включает в себя датчики линейного типа. Датчик этой категории содержит по меньшей мере один чувствительный элемент, который является чувствительным к напряженности магнитного поля. Его выход выдает аналоговые сигналы при относительно низком напряжении. Эти сигналы пропорциональны напряженности магнитного поля. Датчик этого типа традиционно соединяется со схемой для обработки сигналов. Указанная схема относительно сложна; она содержит усилители, компараторы, интегральные источники тока и схемы управления напряжением, чтобы сформировать соответствующие сигналы. Для того чтобы обеспечить малые габариты, эта сложная схема должна быть выполнена в форме специализированной интегральной схемы, известной под аббревиатурой ASIC, что существенным образом увеличивает затраты на разработку и себестоимость компонента, если он должен изготавливаться в малых количествах. Число проводников, подсоединяемых к устройству данного типа, обычно равно по меньшей мере трем, но традиционно их больше.
Ко второй категории относятся датчики цифрового типа или датчики типа «исключающее ИЛИ-НЕ». Эти датчики массового производства содержат по меньшей мере один чувствительный элемент и электронную схему, вырабатывающую цифровую информацию. Они вырабатывают сигнал, когда обнаруживают определенное пороговое значение магнитного поля. Не рассматривая их во взаимосвязи с их температурными характеристиками, которые не всегда являются оптимальными, данный тип датчика скорости часто не позволяет определять направление, а если они обеспечивают это, то они снабжаются по меньшей мере четырьмя проводниками. Более того, если скорость вращения низкая, разрешение измерения скорости невысоко, вырабатываемый сигнал в общем случае содержит два импульса на один оборот объекта, если объект связан с одиночным магнитом. Если бы использовалось большее количество магнитов, то это привело бы к увеличению помех для объекта при его вращении, что не всегда возможно, и потребовало бы разместить датчик ближе к вращающемуся объекту ввиду сближения силовых линий магнитного поля от одного магнита к другому.
Описание изобретения
Конкретной целью настоящего изобретения является создание устройства для измерения скорости и направления вращения объекта, которое не имеет упомянутых выше недостатков. Оно представляет собой устройство для измерения скорости и направления вращения объекта, которое выполнено особенно компактным, которое приспособлено для работы в суровых условиях окружающей среды и которое имеет наименьшее возможное число электрических проводников для подачи на него питания и для передачи информации, которую оно вырабатывает. Указанное устройство должно работать без контакта с перемещающимся объектом.
Для достижения указанных целей настоящее изобретение использует магнитное измерительное устройство во взаимосвязи со средством восприятия тока, которое создает в проводнике электропитания магнитного измерительного устройства модуляцию тока, протекающего в нем. Модуляция выполняется таким путем, чтобы кодировать информацию, относящуюся как к скорости, так и к направлению вращения объекта. Таким образом, ток, потребляемый устройством для измерения скорости и направления вращения, передает искомую информацию.
Более конкретно, настоящее изобретение относится к устройству для измерения скорости и направления вращения объекта, вблизи которого оно размещается. Оно содержит:
- магнитное измерительное устройство, которое вырабатывает в ответ на вращение объекта, генерирующее изменение магнитного поля, сигналы, характеризующие его скорость и его направление вращения,
- проводник, предназначенный для подсоединения к источнику питания, для подачи тока по меньшей мере к магнитному измерительному устройству,
- средство восприятия тока, размещенное между магнитным измерительным устройством и проводником, которое создает из сигналов, поступающих от магнитного измерительного устройства, модуляцию тока, протекающего в проводнике, причем указанный модулированный ток отображает как скорость, так и направление вращения объекта.
Средство восприятия тока может содержать по меньшей мере один последовательный блок, образованный из резистора и коммутационного элемента, например транзистора.
Частота модулированного тока или число переходов, которые он имеет, отображают скорость объекта. Его форма отображает направление вращения объекта.
Магнитное измерительное устройство может представлять собой линейный датчик, вырабатывающий две пары сигналов со сдвигом фазы относительно друг друга, причем упомянутые сигналы связаны с угловым положением объекта.
Измерительное устройство может содержать два компаратора, на вход каждого из которых подаются сигналы пары, а выход каждого компаратора соединен с проводником через резистор последовательного блока, причем два резистора имеют различные значения.
В предпочтительной конфигурации каждый компаратор содержит элемент для коммутации средства восприятия тока.
Модулированный ток может иметь первую асимметричную форму, когда объект вращается в одном направлении, и ту же форму, но отображенную зеркально, когда объект вращается в другом направлении.
В другой конфигурации магнитное измерительное устройство представляет собой цифровой датчик, вырабатывающий сигнал, представляющий скорость, и сигнал, представляющий направление вращения объекта.
Модулированный ток может иметь коэффициент цикличности больший, чем предварительно определенное пороговое значение, когда объект вращается в одном направлении, и коэффициент цикличности меньший, чем предварительно определенное пороговое значение, когда объект вращается в другом направлении.
Устройство для измерения скорости и направления вращения объекта может содержать два компаратора, на вход каждого из которых подаются сигналы пары, средство для кодирования направления вращения объекта, вход которого соединен с выходом компараторов, средство для смешивания, вход которого соединен с выходом компараторов и с выходом средства кодирования, а выход средства смешивания вырабатывает однозначно определенный сигнал, отображающий скорость и направление вращения объекта, причем указанный однозначно определенный сигнал управляет средством восприятия тока.
Средство кодирования направления вращения может содержать переключающее устройство D.
Устройство для измерения скорости и направления вращения объекта может содержать средство смешивания, вход которого соединен с магнитным измерительным устройством, а выход обеспечивает однозначно определенный сигнал, отображающий скорость и направление вращения объекта, причем упомянутый однозначно определенный сигнал управляет средством восприятия тока.
Средство смешивания может быть образовано схемой на основе логических схем.
Магнитное измерительное устройство, проводник и средство восприятия тока по меньшей мере могут быть помещены в корпус, выполненный из немагнитного материала, причем к проводнику обеспечивается доступ извне указанного корпуса.
Корпус может быть выполнен из металла, например из титана или нержавеющей стали.
Магнитное измерительное устройство соединено с другим проводником для обеспечения подачи питания, причем указанный другой проводник остается заключенным в корпус.
Настоящее изобретение также относится к магнитной системе для сбора данных в потоке, в частности, для углеводородных скважин, которая содержит измерительное устройство, как охарактеризовано выше, и в которой объект имеет форму немагнитного винта, выполненного взаимосвязанным с упомянутым по меньшей мере одним магнитом.
Для обеспечения минимально возможных возмущений потока, в который погружается винт, указанный винт и измерительное устройство размещены на одной линии друг с другом, вдоль оси вращения.
Краткое описание чертежей
Настоящее изобретение поясняется в последующем описании вариантов его осуществления, приведенных только для иллюстрации, но ни в коем случае не для ограничения, со ссылками на чертежи, на которых представлено следующее:
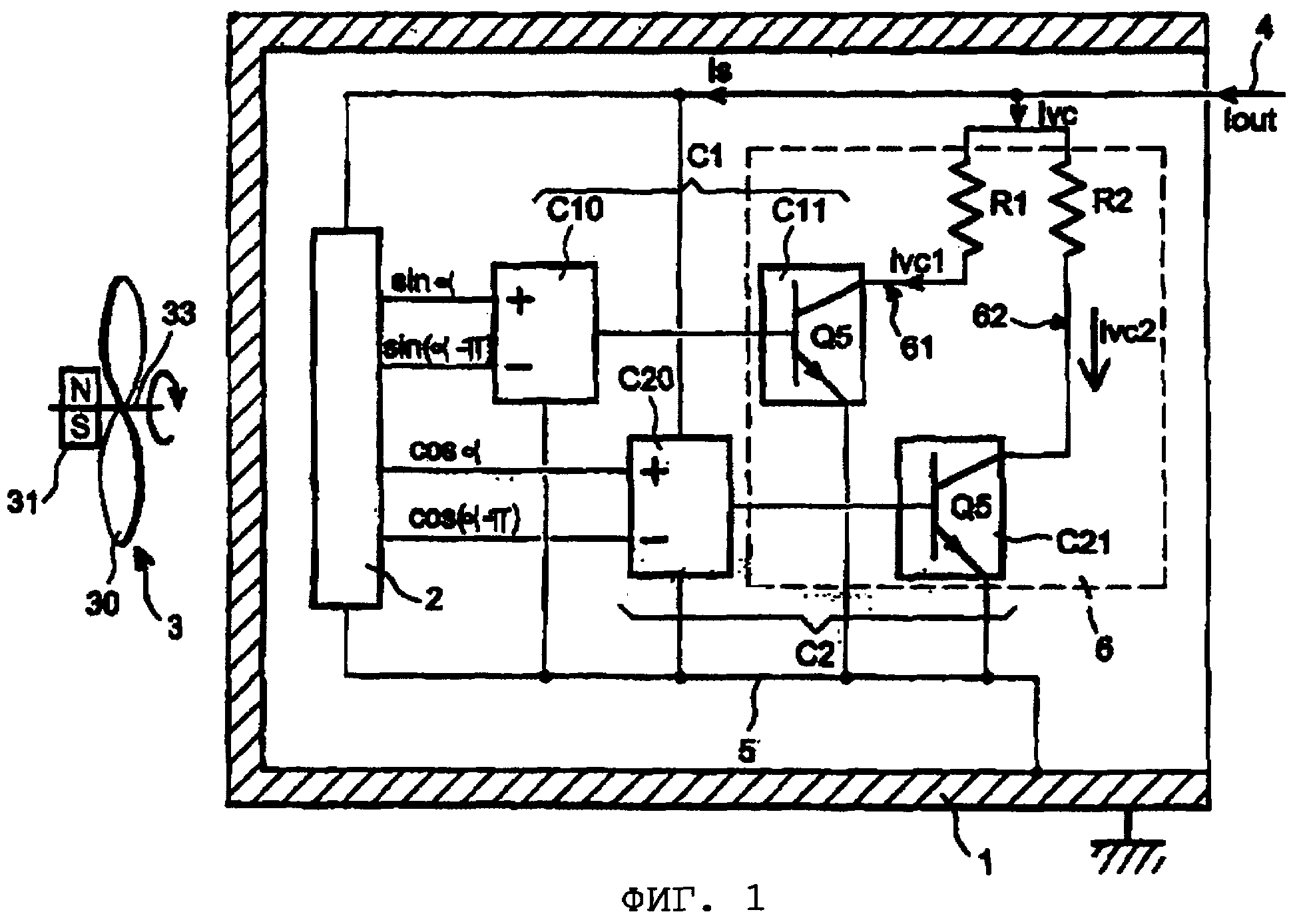
Фиг.1 - электрическая схема первого варианта осуществления устройства для измерения скорости и направления вращения в соответствии с изобретением.
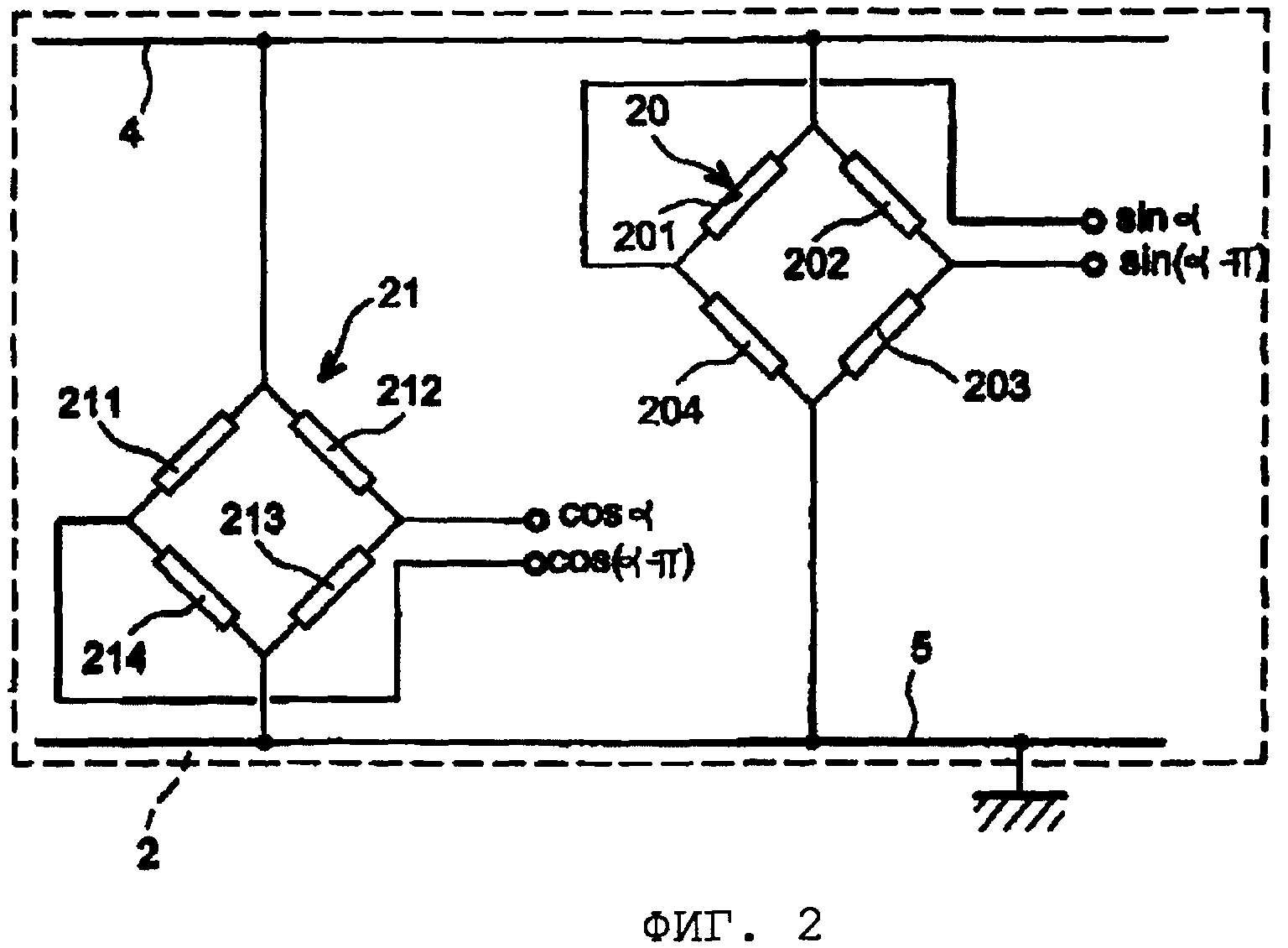
Фиг.2 - электрическая схема магнитного измерительного устройства, которое может быть использовано в устройстве по фиг.1.
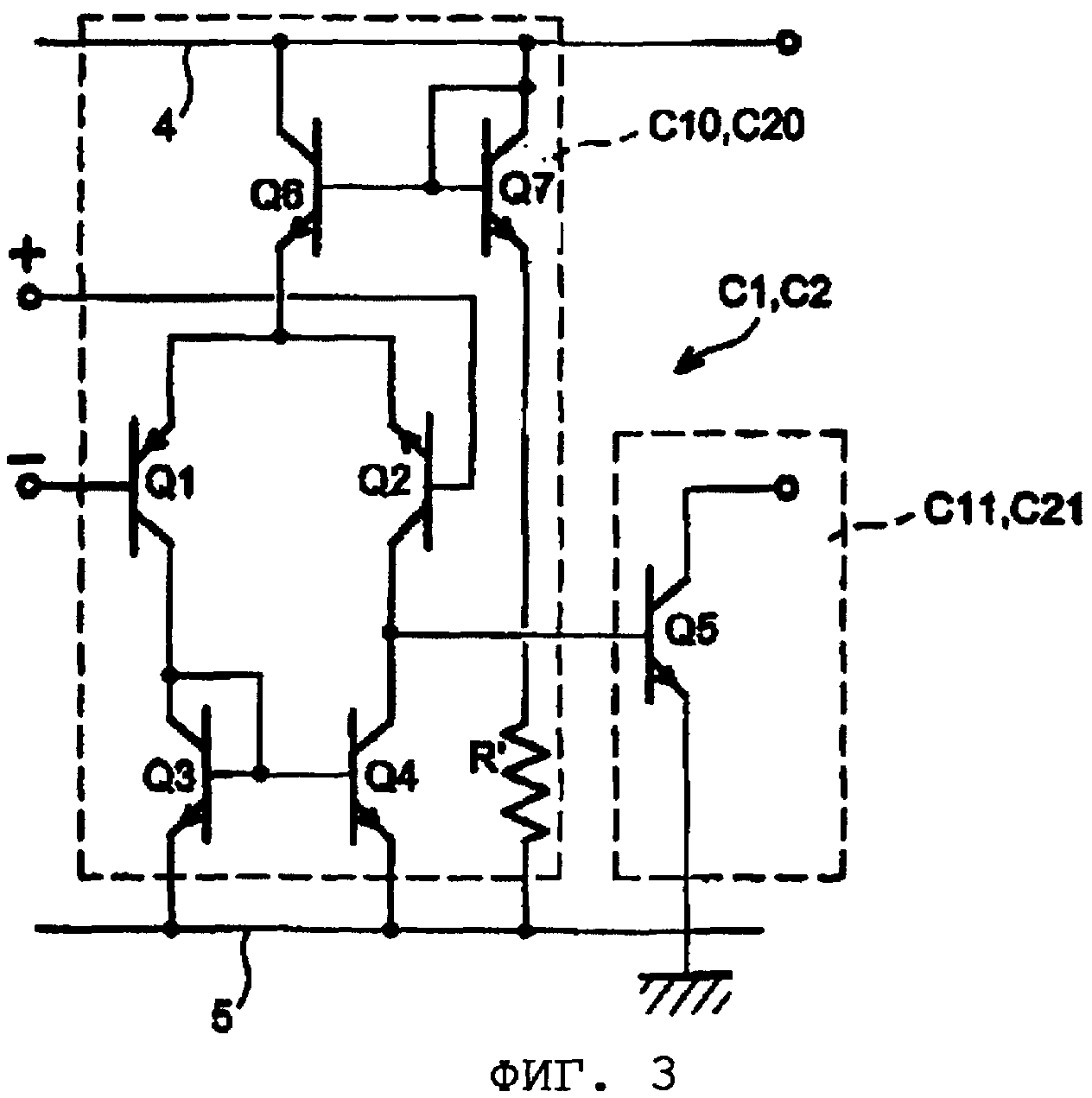
Фиг.3 - электрическая схема компаратора, который может быть использован в устройстве по фиг.2.
Фиг.4A-4E - временные диаграммы компонентов Is, Ivc1, Ivc2, Ivc тока Iout, протекающего в проводнике устройства для измерения скорости и направления вращения по фиг.1, причем фиг.4Е иллюстрирует форму тока Iout.
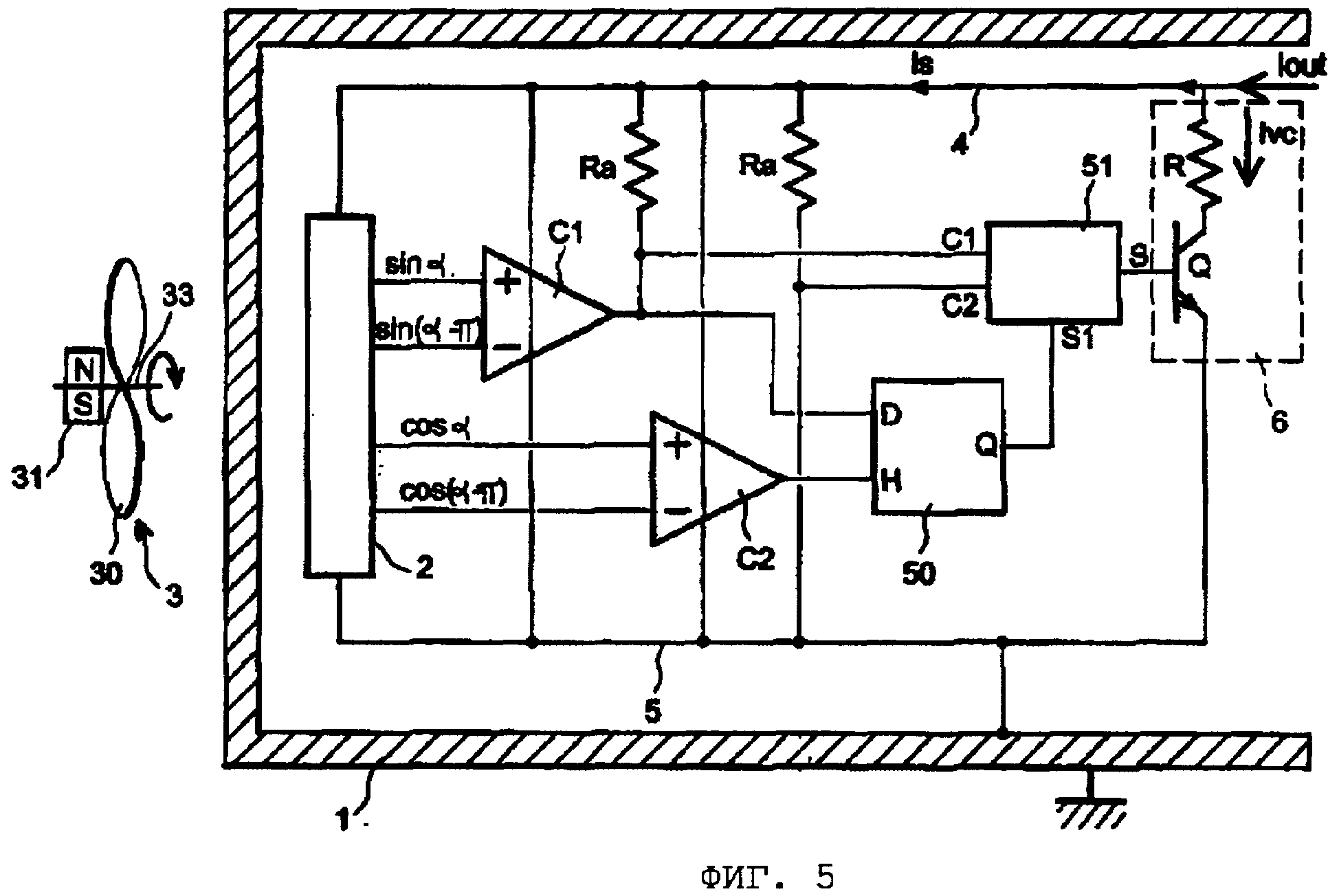
Фиг.5 - электрическая схема второго варианта осуществления устройства для измерения скорости и направления вращения в соответствии с изобретением.
Фиг.6 - электрическая схема средства смешивания, которое может быть использовано в устройстве по фиг.1.
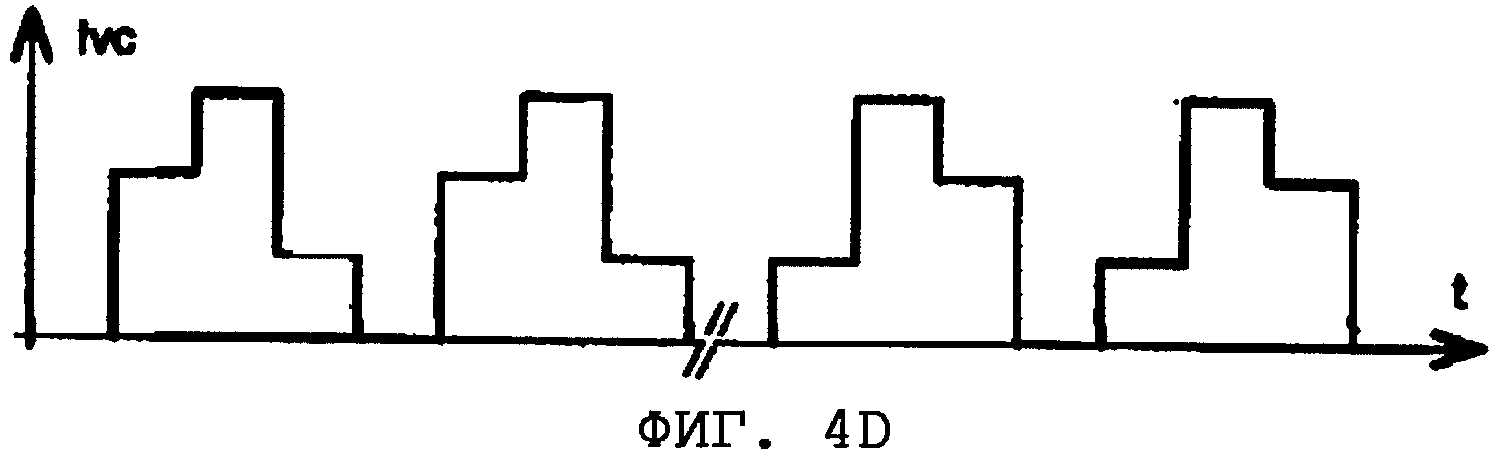
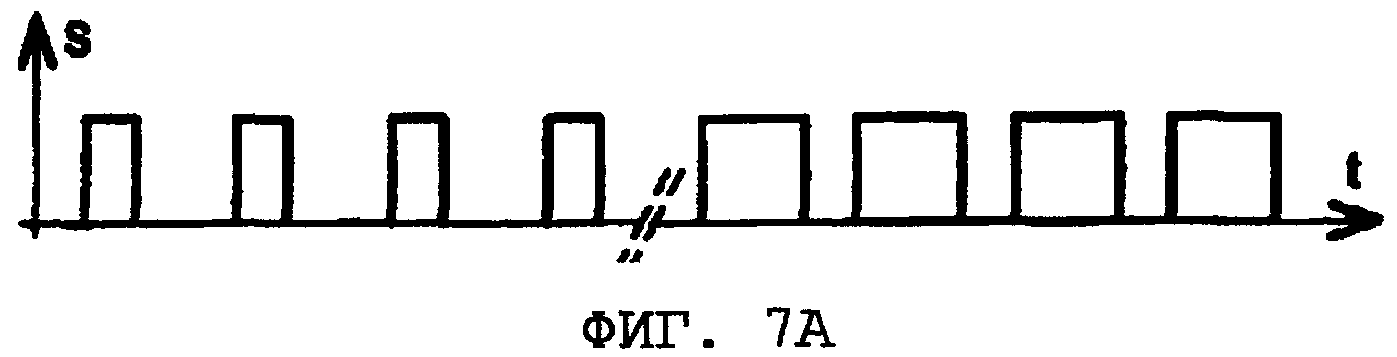
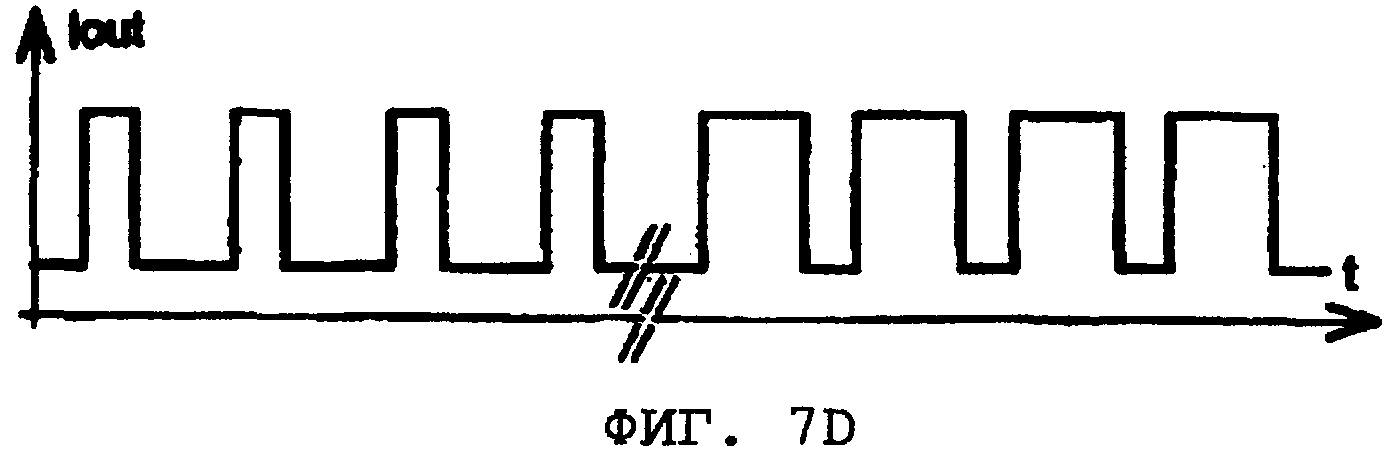
Фиг.7A-7D - временные диаграммы сигнала S, вырабатываемого средством смешивания, и компонентов Is, Ivc тока Iout, протекающего в проводнике электропитания устройства для измерения скорости и направления вращения по фиг.5, причем фиг.7D иллюстрирует форму тока Iout.
Фиг.8А - электрическая схема другого варианта осуществления устройства для измерения скорости и направления вращения в соответствии с изобретением.
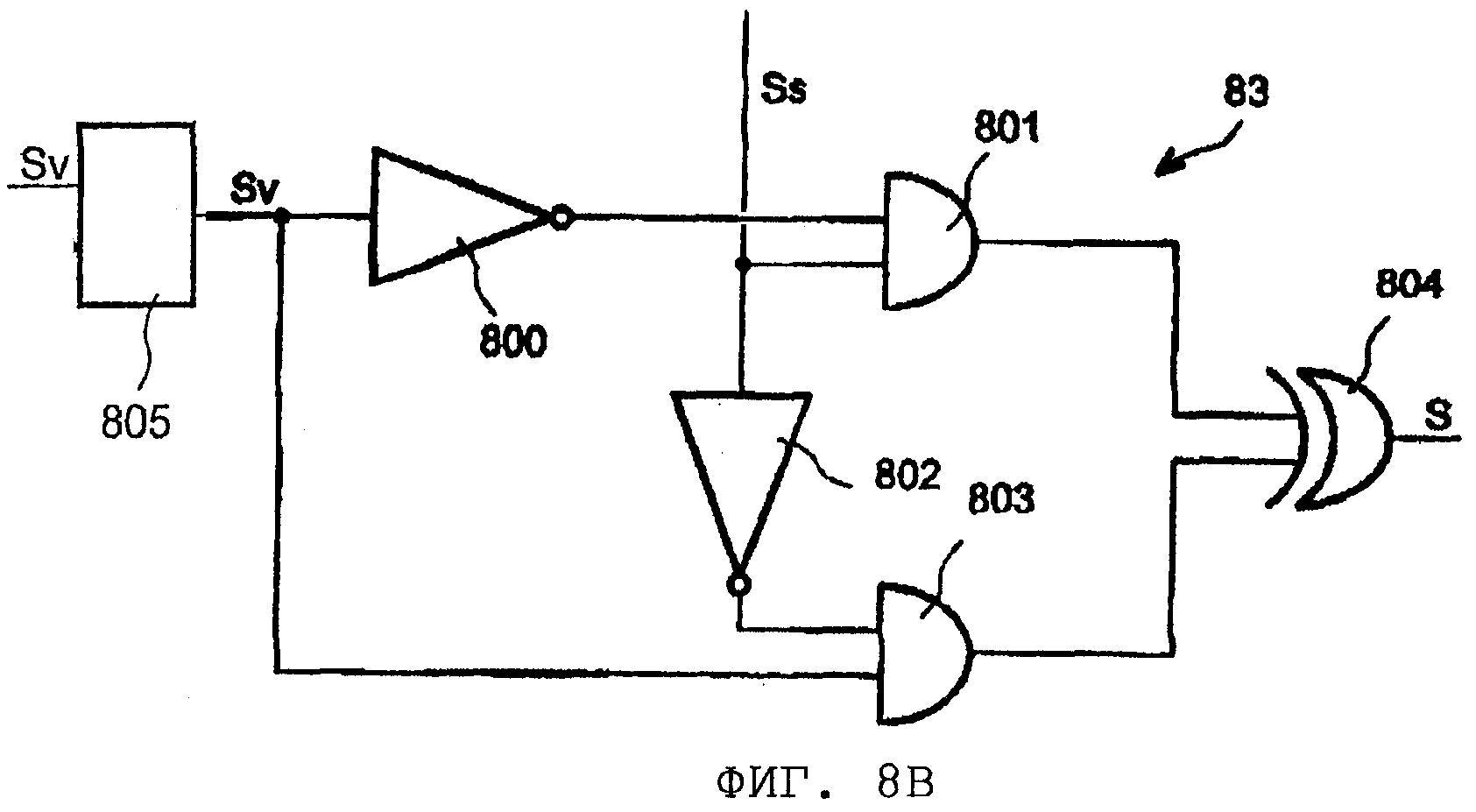
Фиг.8В - электрическая схема средства смешивания, которое может быть использовано в устройстве по фиг.8А.
Фиг.9 - представление магнитной системы для сбора данных в соответствии с изобретением, иллюстрирующее сечение устройства для измерения скорости и направления вращения по фиг.1.
Идентичные, сходные или эквивалентные части на различных чертежах, описанных ниже, обозначены одними и теми же ссылочными позициями для облегчения понимания того, что показано на последовательных чертежах.
Различные элементы, показанные на чертежах, не обязательно должны быть в одинаковом масштабе для облегчения понимания показанного на чертежах.
Детальное описание конкретных вариантов осуществления
На фиг.1 показана электрическая схема устройства для измерения скорости и направления вращения объекта в соответствии с изобретением. Эта конфигурация является предпочтительной конфигурацией изобретения, поскольку она особенно проста, компактна и экономична. Подразумевается, что это устройство для измерения скорости и направления вращения объекта предусматривается для использования на промыслах для добычи углеводородов, и в этом случае объект представляет собой винт, выполненный как составная часть по меньшей мере одного магнита.
Устройство для измерения скорости и направления вращения объекта содержит расположенные внутри защитного корпуса из немагнитного металла 1 магнитное измерительное устройство 2, которое вырабатывает сигналы, характеризующие скорость и направление вращения объекта 3, с которым оно взаимодействует, причем упомянутый объект 3 при вращении генерирует изменение магнитного поля в окрестности магнитного измерительного устройства 2. Изменение магнитного поля является периодическим, если скорость вращения существенно постоянная.
В данном примере винт обозначен ссылочной позицией 30, а магнит - ссылочной позицией 31. Этот корпус 1 может также использоваться для соединения с заземлением, как показано ниже, и в этом случае он выполняется из электропроводного материала.
Для обеспечения функционирования электрический ток должен протекать через магнитное измерительное устройство 2. Оно должно соединяться с источником питания (не показан) посредством проводника 4 электропитания. Указанный проводник 4, соединенный с магнитным измерительным устройством 2, доступен извне защитного корпуса 1. Указанное магнитное измерительное устройство 2 также соединено с другим электрическим проводником 5 для обеспечения его электропитания. Этот другой проводник 5 может также соединяться со вторым выводом (который обычно является заземлением) источника питания для обеспечения обратного пути для тока, и в этом случае он присутствует в защитном корпусе 1 подобно проводнику 4. В особенно интересном варианте осуществления этот другой проводник 5 остается расположенным в защитном корпусе 1 и находится в электрическом контакте с защитным корпусом 1, который обычно соединяется с заземлением. Более точно, защитный корпус 1 помещен в корпусе устройства сбора данных и электрически контактирует с ним, и именно указанный корпус устройства соединен с заземлением. В этом случае будет иметься только один проводник 4, который размещен в корпусе 1.
Для того чтобы обеспечить доступность сигналов, вырабатываемых магнитным измерительным устройством 2, без увеличения числа электрических проводников, выходящих из устройства для измерения скорости и направления вращения объекта, указанное устройство для измерения скорости и направления вращения объекта 3 содержит средство 6 восприятия тока, размещенное между магнитным измерительным устройством 2 и электрическим проводником 4. Указанное средство 6 восприятия тока принимает сигналы от магнитного измерительного устройства 2 после преобразования, если необходимо, и создает в проводнике 4 электропитания модуляцию амплитуды тока, который циркулирует в нем, посредством сигналов от магнитного измерительного устройства. Ток, протекающий в проводнике 4 электропитания, затем передает информацию относительно скорости и направления вращения объекта.
В этом варианте осуществления магнитное измерительное устройство 2 представляет собой датчик на магниторезистивном эффекте типа линейных датчиков. В действительности он представляет собой датчик углового положения. Он вырабатывает сигналы, представляющие угловое смещение α, которое имеется между вращающимся магнитным полем и фиксированным опорным направлением (например, направлением тока, протекающего в элементах, которые образуют датчик). Его эквивалентная диаграмма показана на фиг.2.
Для того чтобы иметь возможность определять два типа информации, иными словами, скорость и направление вращения, необходимо иметь два чувствительных элемента, которые должны вырабатывать смещенные по фазе сигналы, например, на π/2. В описываемом варианте осуществления магнитный датчик 2 содержит первый чувствительный элемент 20 и второй чувствительный элемент 21, причем оба чувствительных элемента выполнены с четырьмя магниторезистивными элементами, соединенными по мостовой схеме. Магниторезистивные элементы обозначены ссылочными позициями 201-204 для первого чувствительного элемента 20 и ссылочными позициями 211-214 для второго чувствительного элемента 21. Сопротивление указанных элементов изменяется как функция напряженности магнитного поля. Первый чувствительный элемент 20 вырабатывает пару сигналов напряжений в противофазе, один из которых пропорционален sin α, а другой пропорционален sin (α-π). Второй чувствительный элемент 21 вырабатывает пару сигналов напряжений в противофазе, один из которых пропорционален cos α, а другой пропорционален cos(α-π).
Два чувствительных элемента 20, 21 являются частью одного и того же магнитного датчика, что означает, что они имеют одинаковые характеристики и более или менее одинаковое температурное поведение.
Вместо использования двух чувствительных элементов одного и того же магнитного датчика можно предусмотреть использование двух отдельных магнитных датчиков. Эта конфигурация является менее предпочтительной, поскольку измерения могут быть искажены, в частности, что касается направления вращения, если устройство для измерения скорости и направления вращения работает в среде, где температура подвержена изменениям и если датчики имеют разную чувствительность.
Каждая пара сигналов напряжений подается на вход компаратора, указанные компараторы обозначены как С1 для первой пары и С2 для второй пары.
Выход первого компаратора С1 соединен через первый калибровочный резистор R1 с электрическим проводником 4. Выход второго компаратора С2 соединен через второй калибровочный резистор R2 с проводником 4 электропитания.
Указанные два калибровочных резистора R1 и R2 имеют разные значения. Можно выбрать, например, R2=2R1, где сопротивление R1 равно 1 кОм. Значения сопротивления выбираются как функция амплитудной модуляции тока.
Однако возможны и другие значения. Компараторы, связанные с калибровочными резисторами R1 и R2, кодируют сигналы, вырабатываемые датчиками углового положения.
Компараторы С1 и С2 являются обычными интегральными компараторами. Компаратор имеет два выходных состояния; он вырабатывает напряжение высокого уровня или напряжение низкого уровня как функцию сигналов, которые подаются на его входы. Упрощенная принципиальная схема обычного компаратора показана на фиг.3. Он содержит в качестве входного каскада дифференциальную пару на транзисторах Q1 и Q2. Инвертирующий вход выполнен на базе транзистора Q1. Неинвертирующий вход выполнен на базе транзистора Q2. Указанная дифференциальная пара подключена между двумя выводами питания, с одной стороны, через источник, образованный схемой токового зеркала, содержащей транзисторы Q6 и Q7, и поляризационным резистором R′, ас другой стороны, через заряд, образованный схемой токового зеркала, содержащей транзисторы Q3 и Q4. Она содержит выходной каскад, образованный транзистором Q5 с открытым коллектором. Указанный транзистор Q5 является транзистором прерывателя. Выход компаратора образован коллектором транзистора Q5.
В устройстве для измерения скорости и направления вращения именно этот коллектор соединен с проводником 4 через один из калибровочных резисторов R1 и R2. Калибровочные резисторы R1 и R2 заменяют согласующие резисторы, которые традиционно используются на выходе компаратора данного типа и которые обычно имеют значение примерно 10 кОм.
Ниже описана работа компаратора. Когда напряжение, приложенное к неинвертирующему входу, является положительным в большей степени, чем напряжение, приложенное к инвертирующему входу, то напряжение на базе транзистора Q5 падает, и транзистор Q5 запирается. Напряжение на выходе компаратора устанавливается на высокий уровень; он равен напряжению питания. Согласующий резистор согласует выходное напряжение компаратора с напряжением питания, когда транзистор Q5 заперт.
Когда напряжение, приложенное к неинвертирующему входу, является положительным в меньшей степени, чем напряжение, приложенное к инвертирующему входу, то напряжение на базе транзистора Q5 возрастает, и транзистор Q5 устанавливается в состояние насыщения. Напряжение на выходе компаратора устанавливается на низкий уровень.
Компараторы С1 и С2, представленные на фиг.1, могут быть представлены как состоящие из входного блока С10, С20, содержащего дифференциальную пару, заряд и источник, причем за указанным входным блоком следует выходной каскад С11, С21, образованный из транзистора Q5, иными словами, коммутационный элемент.
Средство 6 восприятия тока образовано из двух последовательных блоков 61, 62, причем первый блок 61 содержит выходной каскад С11 компаратора С1 и резистор R1, соединенные последовательно, а второй блок 62 содержит выходной каскад С21 компаратора С2 и резистор R2, соединенные последовательно.
Упомянутое средство 6 восприятия тока управляется напряжениями, прикладываемыми к базе каждого из транзисторов Q5 выходного каскада С11, С21 двух компараторов С1, С2.
Ток Iout, протекающий в проводнике 4 электропитания, может быть разделен на ток питания Is, предназначенный для питания магнитного измерительного устройства 2 и компараторов С1, С2, и ток Ivc, поглощаемый средством 6 восприятия тока, причем ток Ivc в свою очередь может быть разделен на ток Ivc1, поглощаемый первым блоком 61 средства 6 восприятия тока, и ток Ivc2, поглощаемый вторым блоком 62 средства 6 восприятия тока.
На фиг.4А схематично представлена форма тока Is, на фиг.4В - форма тока Ivc1 и на фиг.4С - форма тока Ivc2 как функция времени. На фиг.4D показан ток Ivc, поглощаемый средством 6 восприятия тока, представляющий собой сумму токов Ivc1 и Ivc2. Предполагается, что объект 3 совершает один оборот в одном направлении и один оборот в другом направлении.
Ток питания Is является по существу постоянным во времени, когда объект 3 приводится во вращение. Токи Ivc1, Ivc2 имеют сдвиг по фазе на π/2, поскольку один из них соответствует синусу, а другой - косинусу одного и того же угла. Когда объект вращается в одном направлении, ток Ivc1 опережает ток Ivc2, а когда объект 3 вращается в другом направлении, имеет место обратное соотношение. Амплитуды токов Ivc1 и Ivc2 различны, так как калибровочные резисторы R1 и R2 различаются. При выборе величин резисторов R1 и R2 различающимися в два раза амплитуда одного из токов в два раза превышает амплитуду другого тока.
Ток Ivc принимает форму асимметричного сигнала, изменяющегося ступенчато дважды за каждый оборот объекта 3. Он имеет одну форму, когда объект 3 вращается в одном направлении, и ту же форму, но имеющую вид зеркально повернутого представления, когда объект 3 вращается в другом направлении. Его частота или число переходов асимметричного сигнала отображает скорость объекта. Ток отображает как скорость, так и направление вращения объекта 3.
Ток Iout представлен на фиг.4Е. Он имеет ту же самую характеристику, что и ток Ivc, поскольку ток Is просто добавляется к нему. Поэтому форма тока Iout, поглощаемого устройством для измерения скорости и направления вращения, указывает на направление вращения. Частота тока Iout указывает, со своей стороны, на скорость вращения. Ток Iout передает информацию как о скорости, так и о направлении вращения объекта 3.
Ток Iout имеет 8 переходов на один оборот объекта 3. Даже если объект 3 вращается с низкой скоростью, ток Iout имеет хорошее разрешение по скорости.
Устройство для определения скорости и направления вращения не требуется помещать в стабилизированное магнитное поле, чтобы обеспечивать его корректную работу. Измерения, которые оно осуществляет, не подвергаются влиянию температурных изменений, хотя они действуют на напряженность магнитного поля и/или на чувствительность магнитного датчика.
Этот тип устройства для измерения скорости и направления вращения не очень чувствителен к незначительным вариациям относительного положения объекта по отношению к магнитному датчику ввиду наличия двух компараторов С1 и С2, каждый из которых принимает два сигнала в противофазе от одного и того же чувствительного элемента.
На фиг.5 показано, исходя из того же самого магнитного датчика 2, другое средство для обработки сигналов, которые он вырабатывает. Два компаратора С1 и С2, как показано на фиг.1, вновь представлены. Их выход соединен с проводником 4 электропитания через согласующий резистор Ra. Теперь компараторы С1 и С2 используются обычным способом и больше не являются средством восприятия тока для модулирования тока, протекающего в проводнике 4 электропитания. Как и ранее, компараторы вырабатывают сигналы в виде импульсов, которые имеют коэффициенты цикличности, близкие к 50%. Они отличаются тем, что имеют сдвиг по фазе на π/2. Их частота характеризует скорость вращения объекта.
В этой конфигурации средство 6 восприятия тока включено между магнитным измерительным устройством 2 и проводником 4 электропитания для модуляции тока, протекающего в проводнике электропитания, чтобы отражать как скорость, так и направление вращения объекта.
Однако теперь на средство 6 восприятия тока подается однозначно определенный сигнал S, полученный из сигналов, выработанных компараторами С1, С2.
Ниже описано, каким образом формируется однозначно определенный сигнал S, который передает информацию как о скорости, так и о направлении вращения. Сначала описано, каким образом выделить сигнал S1, который непосредственно отображает направление вращения. Для этого используется средство для кодирования направления вращения 50, которое может иметь форму переключающего устройства. Выход первого компаратора С1 соединен с информационным входом D переключающего устройства, выход второго компаратора С2 соединен с входом Н таймера переключающего устройства. Возможно инверсное соотношение. На выход Q переключающего устройства выдается сигнал S1; он имеет высокий уровень, если объект вращается в одном направлении, и низкий уровень, если объект вращается в другом направлении.
Также обеспечивается средство для смешивания 51, объединяющее сигналы с компараторов С1, С2 (обозначенные соответственно как С1 и С2 для упрощения), и средство кодирования направления вращения 50 для генерирования однозначно определенного сигнала S, представляющего как скорость, так и направление вращения объекта. Указанный сигнал S предназначен для управления средством 6 восприятия тока, которое предназначается для модулирования тока, протекающего в проводнике 4.
Упомянутое средство 51 смешивания оказывает влияние на коэффициент периодичности. Оно вырабатывает сигнал, имеющий коэффициент периодичности, превышающий предварительно определенное пороговое значение, если объект вращается в одном направлении, и сигнал, имеющий коэффициент периодичности меньший, чем предварительно определенное значение, если объект вращается в другом направлении. Частота упомянутого сигнала непосредственно характеризует скорость вращения объекта. Предварительно определенное пороговое значение в данной конфигурации составляет 50%.
Указанное средство 51 для смешивания может быть образовано логической схемой, показанной на фиг.6. Указанная логическая схема содержит первую логическую схему «И» 60, один вход которой соединен с выходом первого компаратора С1, а другой вход которой соединен с выходом второго компаратора С2. Выход первой логической схемы «И» 60 соединен с входом первого инвертора 61. Выход первого инвертора 61 соединен с одним из входов второй логической схемы «И» 63. Другой вход второй логической схемы «И» 63 соединен с выходом средства 50 кодирования направления вращения. Выход Q средства 50 кодирования также связан с входом второго инвертора 62. Выход второго инвертора 62 соединен с одним из входов третьей логической схемы «И» 64. Другой вход третьей логической схемы «И» 64 соединен с выходом первой логической схемы «И» 60. Выход второй логической схемы «И» 63 соединен с одним из входов логической схемы «исключающее ИЛИ» 65. Другой вход логической схемы «исключающее ИЛИ» 65 соединен с выходом третьей логической схемы «И» 64. На выходе логической схемы «исключающее ИЛИ» 65 вырабатывается однозначно определенный сигнал S, отражающий как скорость, так и направление вращения объекта. Такой сигнал S показан на диаграмме, представленной на фиг.7А. На первом сегменте сигнал S имеет коэффициент цикличности менее 50%, это указывает на то, что объект вращается в одном направлении. На втором сегменте сигнал S имеет коэффициент периодичности больше, чем 50%; это указывает на то, что объект вращается в другом направлении. Частота упомянутого сигнала непосредственно представляет скорость объекта.
Упомянутый однозначно определенный сигнал S подается на вход средства 6 восприятия тока, предназначенного для модуляции тока lout, протекающего в электрическом проводнике 4. Упомянутое средство 6 восприятия тока образовано коммутационным элементом Q, представленным в форме транзистора, база которого соединена с выходом средства 51 смешивания, коллектор которого соединен с проводником 4 через резистор R и эмиттер которого соединен с другим проводником 5.
Ток Iout, протекающий в электрическом проводнике 4, может быть разделен на ток питания Is магнитного измерительного устройства 2 и электронных средств, расположенных до входа средства 6 восприятия тока, и ток Ivc, поглощаемый средством 6 восприятия тока, когда оно управляется сигналом S. Диаграмма на фиг.7В показывает форму тока Is, диаграмма на фиг.7С показывает форму тока Ivc, ее форма отслеживает форму сигнала S. Диаграмма на фиг.7D показывает форму тока Iout.
Вместо использования магнитного измерительного устройства типа линейного магнитного датчика можно использовать коммерчески доступный цифровой магнитный датчик 80, имеющий выход 81, на котором вырабатывается сигнал Sv, непосредственно отображающий скорость объекта 3, и выход 82, на котором вырабатывается сигнал Ss, непосредственно отображающий направление вращения объекта 3. Этот вариант осуществления представлен на фиг.8А. Магнитный датчик может представлять собой магнитный датчик на эффекте Холла или супермагнитнорезистивный датчик.
Два выхода магнитного датчика соединены со средством 83 смешивания для генерирования однозначно определенного сигнала S, представляющего как скорость, так и направление вращения объекта 3, указанный однозначно определенный сигнал S предназначен для управления средством 6 восприятия тока, предназначенным для модуляции тока, протекающего в проводнике 4 электропитания.
Упомянутое средство 83 смешивания может быть сопоставимым с представленным на фиг.5 и 6 и может выполнять кодирование сигналов, приложенных к его входу, на основе коэффициента цикличности.
На фиг.8В показан вариант осуществления средства 83 смешивания. Он использует логическую схему, состоящую из моностабильной схемы 805, вход которой соединен с выходом 81 магнитного датчика 80 (тем, на котором вырабатывается сигнал Sv). Моностабильная схема 805 используется для нарушения симметрии сигнала Sv, который имеет коэффициент периодичности, равный 50%. Она генерирует импульсы управляемой длительности, чтобы получить сигнал, имеющий коэффициент цикличности, отличный от 50%. Выход моностабильной схемы 805 соединен с входом первого инвертора 800. Выход первого инвертора 800 соединен с одним из входов первой схемы «И» 801. Другой вход первой схемы «И» 801 соединен с выходом 82 магнитного датчика 80 (тем, на котором вырабатывается сигнал Ss). Выход 82 магнитного датчика 80 также соединен с входом второго инвертора 802. Выход второго инвертора 802 соединен с одним из входов второй схемы «И» 803. Другой вход второй схемы «И» 803 соединен с выходом 81 магнитного датчика 80. Выход первой схемы «И» 801 соединен с одним из входов схемы «исключающее ИЛИ» 804. Другой вход схемы «исключающее ИЛИ» соединен с выходом второй схемы «И» 803. На выходе схемы «исключающее ИЛИ» вырабатывается однозначно определенный сигнал S, отображающий как скорость, так и направление вращения объекта. Если он имеет коэффициент периодичности, например, менее 50%, то это означает, что объект вращается в одном направлении. Если он имеет коэффициент цикличности, например, более 50%, то это означает, что объект вращается в другом направлении. Частота упомянутого однозначно определенного сигнала S непосредственно представляет скорость объекта. Указанный однозначно определенный сигнал используется для управления средством 6 восприятия тока, которое имеет ту же самую форму, что и показанная на фиг.5. Другое различие устройства для измерения скорости и направления вращения, выполненного согласно фиг.8А, состоит в том, что другой проводник 5 также доступен извне защитного корпуса 1. Этот другой проводник 5 больше не заключен в защитном корпусе 1.
Защитный корпус 1 может быть выполнен из немагнитного материала, который устойчив к воздействиям внешней среды, в которую он должен погружаться.
В случае применения, связанного с нефтяной отраслью, жидкость имеет температуру, примерно равную 150°С, давление, примерно равное 108 Па, и может быть весьма коррозионной. Она может включать в себя серосодержащие соединения, песок и другие обломки породы в суспензии и т.д. Защитный корпус 1 может быть выполнен, например, из немагнитного титана или нержавеющей стали.
Он может иметь форму небольшой цилиндрической трубки с осью XX′, имеющей внешний диаметр около 5 мм и длину около 25 мм. Магнитное измерительное устройство 2 и связанные с ним схемы С1, С2, R1, R2 могут иметь форму интегрального модуля на нескольких чипах (МСМ). Упомянутый модуль вставляется в корпус 1, позволяющий проводнику 4 проходить наружу и, в случае необходимости, также проводнику 5. Корпус 1 затем заполняется материалом-заполнителем, таким как эпоксидная смола, чтобы обеспечить сцепление всех компонентов вместе.
На фиг.9 представлена магнитная система для сбора данных в потоке, в частности, для углеводородных скважин. Она содержит показанное в разрезе устройство для измерения скорости и направления вращения в соответствии с изобретением к его конфигурации по фиг.1. Система дополнительно содержит объект, который имеет форму немагнитной крыльчатки 30, выполненной совместно с по меньшей мере одним магнитом 31. Магнитный датчик 2, компараторы С1, С2 и калибровочные резисторы R1, R2 смонтированы на подложке 6, например, типа гибкой печатной схемы. Электрические соединения между угловым магнитным датчиком 2, компараторы С1, С2 и калибровочные резисторы R1, R2 выполнены на подложке 6. Использованные компоненты (например, компараторы С1, С2), если они в интегральном исполнении, могут быть смонтированы открыто на подложке 6. Заполняющий материал обозначен ссылочной позицией 7. Чтобы использовать по возможности меньше места, компоненты размещены на двух основных поверхностях подложки 6. В примере по фиг.9 резисторы R1, R2 на поверхности подложки 6, а компараторы C1, C2 - на другой поверхности. Магнитный датчик 2 расположен на торце положки 6. Он закреплен по существу перпендикулярно плоскости подложки 6.
Объект 3 может быть расположен на продолжении корпуса 1, вдоль оси вращения 32, как показано на фиг.1, 5, 8A и 9. Ось вращения 32 объекта и ось XX′ корпуса 1 совпадают. Если объект расположен, как показано на фиг.1, 5, 8A и 9, расстояние между объектом 3 и магнитным датчиком 2 может составлять несколько миллиметров. Это расстояние зависит от чувствительности датчика и интенсивности магнитного поля, которое является функцией размеров магнита и его материала.
Фиг.9 иллюстрирует, что объект 3 может быть размещен рядом с корпусом 1, их оси 32, XX′ смещены, но по существу параллельны. Объект 3 в этом положении показан пунктирной линией.
Хотя представлены и детально описаны различные варианты осуществления настоящего изобретения, следует иметь в виду, что различные изменения и модификации могут быть осуществлены без отклонения от объекта изобретения
Реферат
Изобретение предназначено для работы в условиях высоких температур и давлений, а также коррозионной текучей среды, в частности, в нефтяной промышленности. Устройство размещено вблизи объекта измерения и содержит магнитное измерительное устройство, которое вырабатывает в ответ на вращение объекта, формирующее изменение магнитного поля, сигналы, представляющие его скорость и его направление вращения. Подача тока питания в магнитное измерительное устройство от соответствующего источника осуществляется по двум проводникам, один из которых может входить в электрический контакт с корпусом. Между магнитным измерительным устройством и проводником размещено средство восприятия тока, которое создает из сигналов, поступающих от магнитного измерительного устройства, модуляцию протекающего в проводнике тока, отображающего как скорость, так и направление вращения объекта. Устройство входит в состав системы для сбора данных в потоке, содержащей немагнитную крыльчатку, выполненную совместно с по меньшей мере одним магнитом. Изобретение обеспечивает повышение точности измерения за счет минимизации электрических проводников для подачи питания и передачи измерительной информации. 2 н. и 19 з.п. ф-лы, 9 ил.
Комментарии