Метод и система обнаружения на основе активных микроволн - RU2622618C1
Код документа: RU2622618C1
Чертежи

Описание
ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА СХОЖИЕ ЗАЯВКИ
Данная патентная заявка имеет приоритет и включает полностью по ссылке патентную заявку США на частичное продолжение №14/160,895 «УСТРОЙСТВО И МЕТОД НА ОСНОВЕ АКТИВНОГО МИКРОВОЛНОВОГО ИЗЛУЧЕНИЯ», поданную 22 января 2014 года; она также имеет приоритет относительно заявки на патент США №14/319,222 «МЕТОД ДИСТАНЦИОННОГО ДОСМОТРА И АНАЛИЗА ОБЪЕКТОВ», поданной 30 июня 2014 года, которая имеет приоритет относительно предварительной заявки на патент США №61/905,940, поданной 19 ноября 2013 года; она также имеет приоритет относительно заявки на патент США №14/259,603 «ИНТЕЛЛЕКТУАЛЬНЫЙ ДОСМОТРОВЫЙ БАРЬЕР И СИСТЕМА», поданной 23 апреля 2014, которая имеет приоритет относительно предварительной заявки на патент США №61/945,921, поданной 28 февраля 2014 года.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Данное изобретение относится к области дистанционного обнаружения скрытых объектов, а именно методов и механизмов обнаружения диэлектрических взрывчатых веществ, скрытых под одеждой или же расположенных на или поблизости от тела человека.
ИСТОРИЯ ИЗОБРЕТЕНИЯ
В настоящее время для решения задачи обнаружения скрытых взрывчатых веществ используются различные методы. Некоторые из этих методов включают: металлодетекторы, детекторы паров, рентгеновские аппараты и специально обученных собак. Многие страны прилагают значительные усилия по разработке новых методов инспекции человеческого тела, основанных на новых физических принципах, включая Рамановское рассеяние, диэлектрические порталы, устройства, работающие с активными и пассивными терагерцовыми волнами, радары пассивного миллиметрового излучения и порталы на основе активного микроволнового излучения.
Упомянутые выше методы не гарантируют требуемой эффективности удаленного и скрытого досмотра; таким образом, данные устройства не могут обнаружить террориста-смертника в нужный период времени, так чтобы была возможность принять необходимые меры до того, как взрывное устройство будет приведено в действие. Другой заметный недостаток методов, используемых в настоящее время, - отсутствие автоматического принятия решения об опасности обнаруженного объекта, а также высокий уровень ложных срабатываний. Данные недостатки делают невозможным использование данных устройств, к примеру, для досмотра большого количества людей, создающих пассажиропоток на транспортных узлах.
Один из методов обнаружения, используемых в настоящее время для обнаружения металлических и неметаллических взрывных устройств, скрытых на теле, работает следующим образом: принимающая антенна фокусируется на небольшом участке тела человека, используя приходящие от этого участка электромагнитные волны. Радиометрические данные затем обрабатываются соответствующим модулем, записывается интенсивность и положение луча. Измеренная интенсивность полученного сигнала представляется как интенсивность свечения. Анализируя распределения интенсивности свечения, можно определить наличие или отсутствие металлического или неметаллического объекта. Основной недостаток данного метода - низкая контрастность получаемого изображения. Данные метод не может четко разделить неметаллический объект и тело человека, в то время как диэлектрик для волн данной частоты прозрачен.
В международных заявках WO 2011/065869 и WO 2011/065868 описывается метод обнаружения скрытых взрывчатых веществ на человеке при помощи микроволнового изображения и видео изображения данного человека, а также указывается на высокую диэлектрическую постоянную взрывчатых веществ. Данные методы не задействуют MB сигнал, отраженный от внешнего слоя исследуемого пространства для обнаружения срытых объектов в данном пространстве.
По-прежнему сохраняется необходимость в скрытом автоматическом (без участия оператора) досмотре толпы движущихся людей с целью обнаружить террориста-смертника и отделить его от других людей.
ОБЗОР ИЗОБРЕТЕНИЯ
Данное изобретение описывает метод и систему для обнаружения потенциально опасных скрытых объектов, таких как взрывчатые вещества, например, переносимых человеком. Посылая микроволновые сигналы и получая отражения данных сигналов от различных частей тела человека, можно рассчитать расстояние между внешним слоем (например, верхней одеждой) и телом человека. Одновременно, если объект спрятан на человеке, можно рассчитать толщину данного объекта. Данные значения сравниваются и используются для получения трехмерного микроволнового изображения, и если регистрируется резкое изменение этих значений, посылается сигнал тревоги. Резкое изменение обусловлено повышенной диэлектрической постоянной определенных диэлектриков, используемых в качестве взрывчатки и других опасных объектов, которые приводят к изменению скорости прохождения микроволнового сигнала. Данное изобретение использует схожий метод обнаружения путем расположения передатчиков микроволнового сигнала напротив приемников сигнала, таким образом, позволяя делать расчеты и на основе прошедших микроволновых сигналов. Дополнительно, трехмерное видеоизображение точки во времени может накладываться на трехмерное микроволновое изображение, позволяя, таким образом, получать более точные данные и результаты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
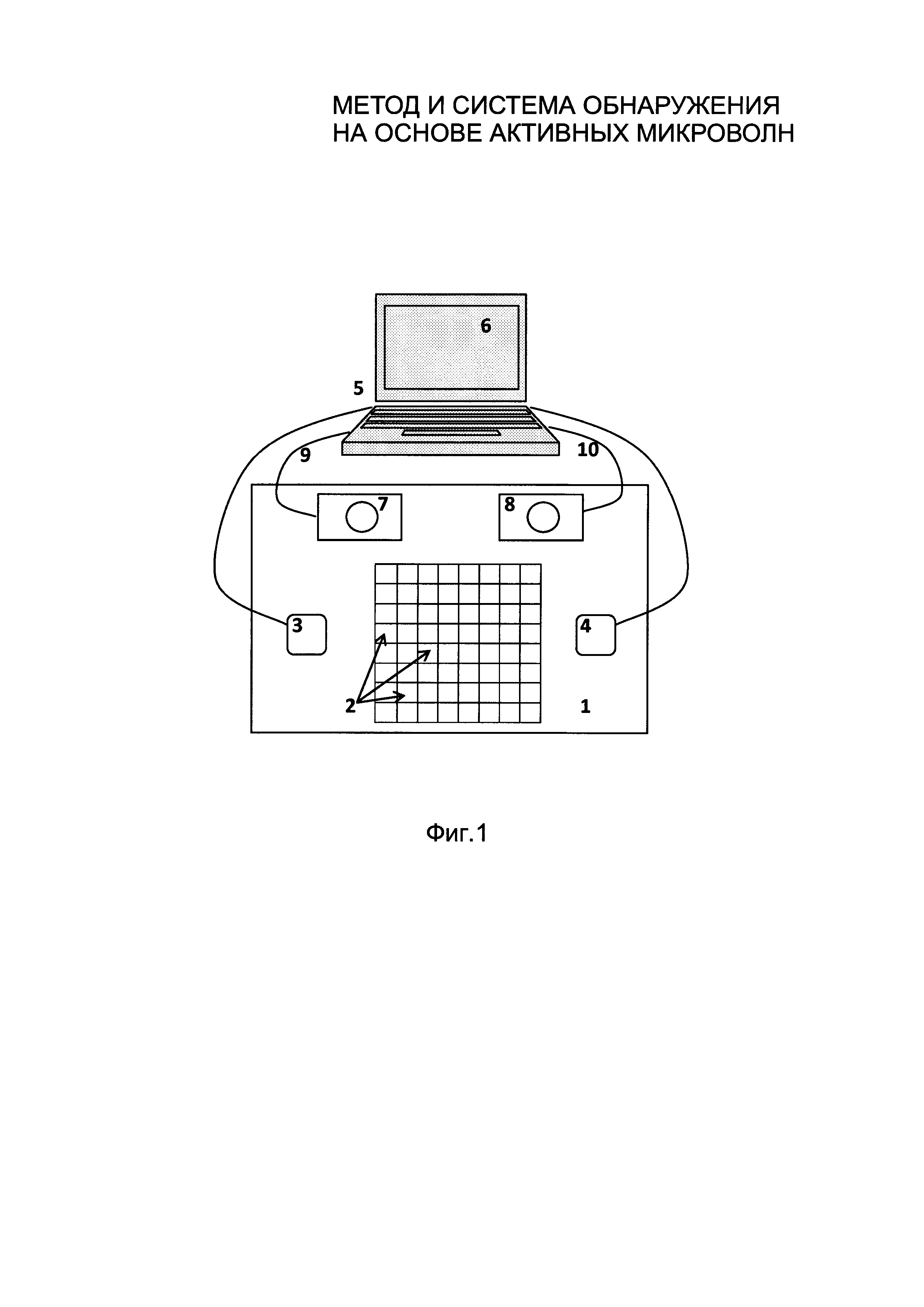
На Фиг. 1 показана схема установки для обнаружения скрытых диэлектрических объектов.
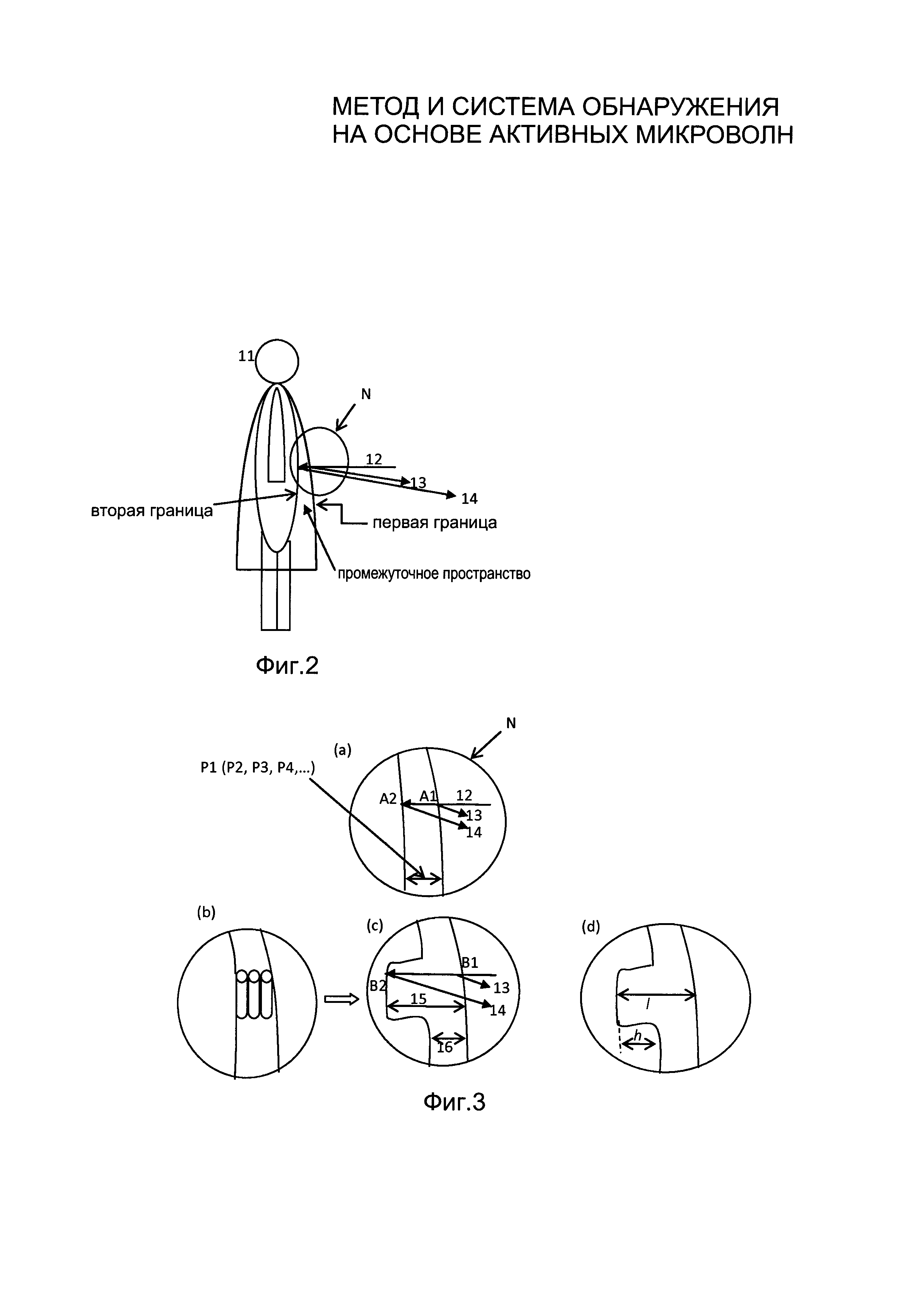
На Фиг. 2 показан путь микроволнового излучения и его отражение от пальто на человеке и границ тела (первая и вторая граница, соответственно).
На Фиг. 3 показаны детали микроволнового (MB) луча при (а) отсутствии и (б), (в), (г) наличии скрытого опасного объекта. На Фиг. 3 (б) показан пример расположения взрывчатых веществ на теле человека под пальто или другой верхней одеждой. На Фиг. 3 (в) и 3 (г) показаны оптические пути и расстояния, измеренные или рассчитанные на основе данного изобретения для случаев присутствия скрытых объектов.
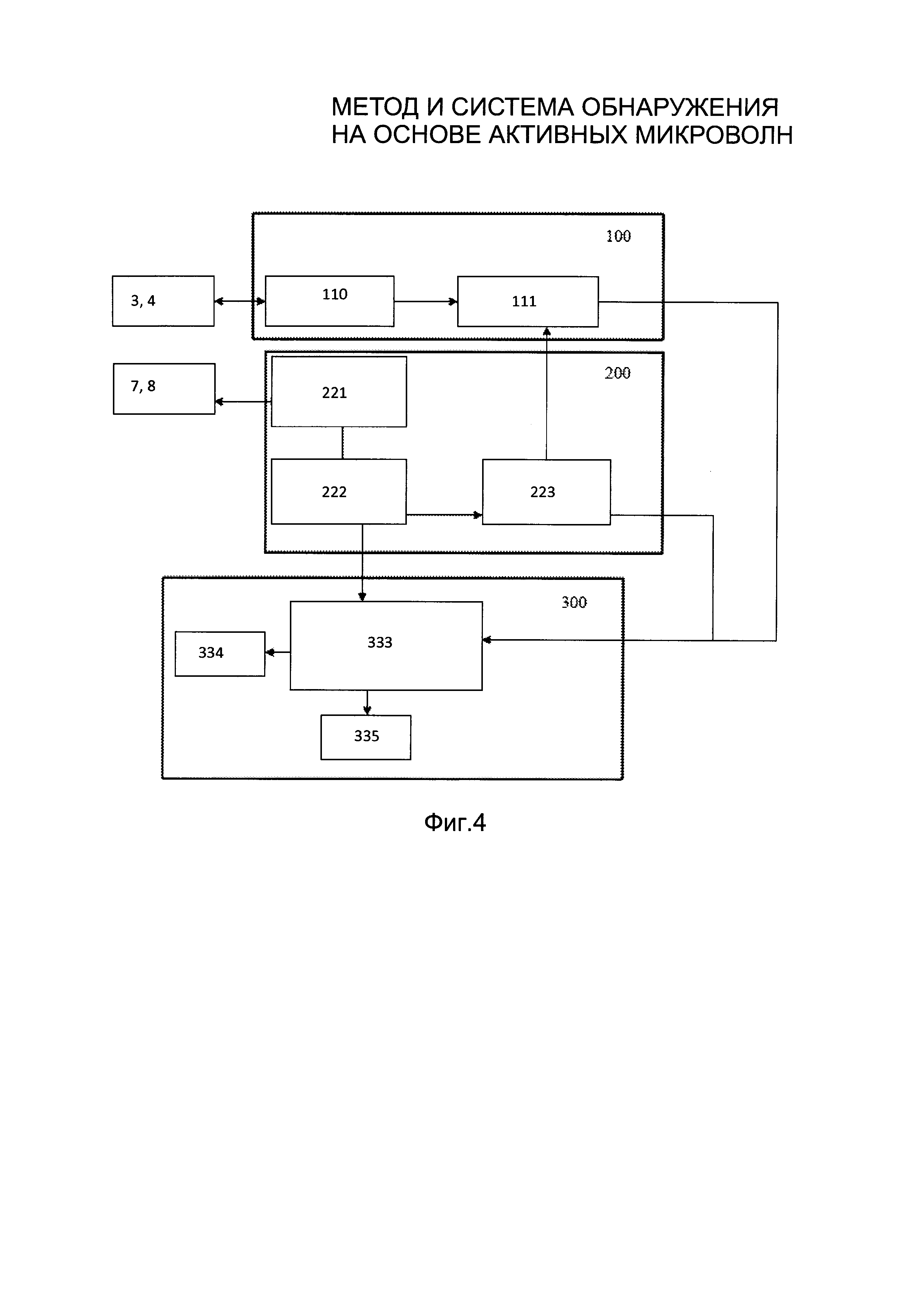
На Фиг. 4 показан пример процедуры анализа трехмерных микроволновых и и видеоизображений, а также автоматический сигнал тревоги.
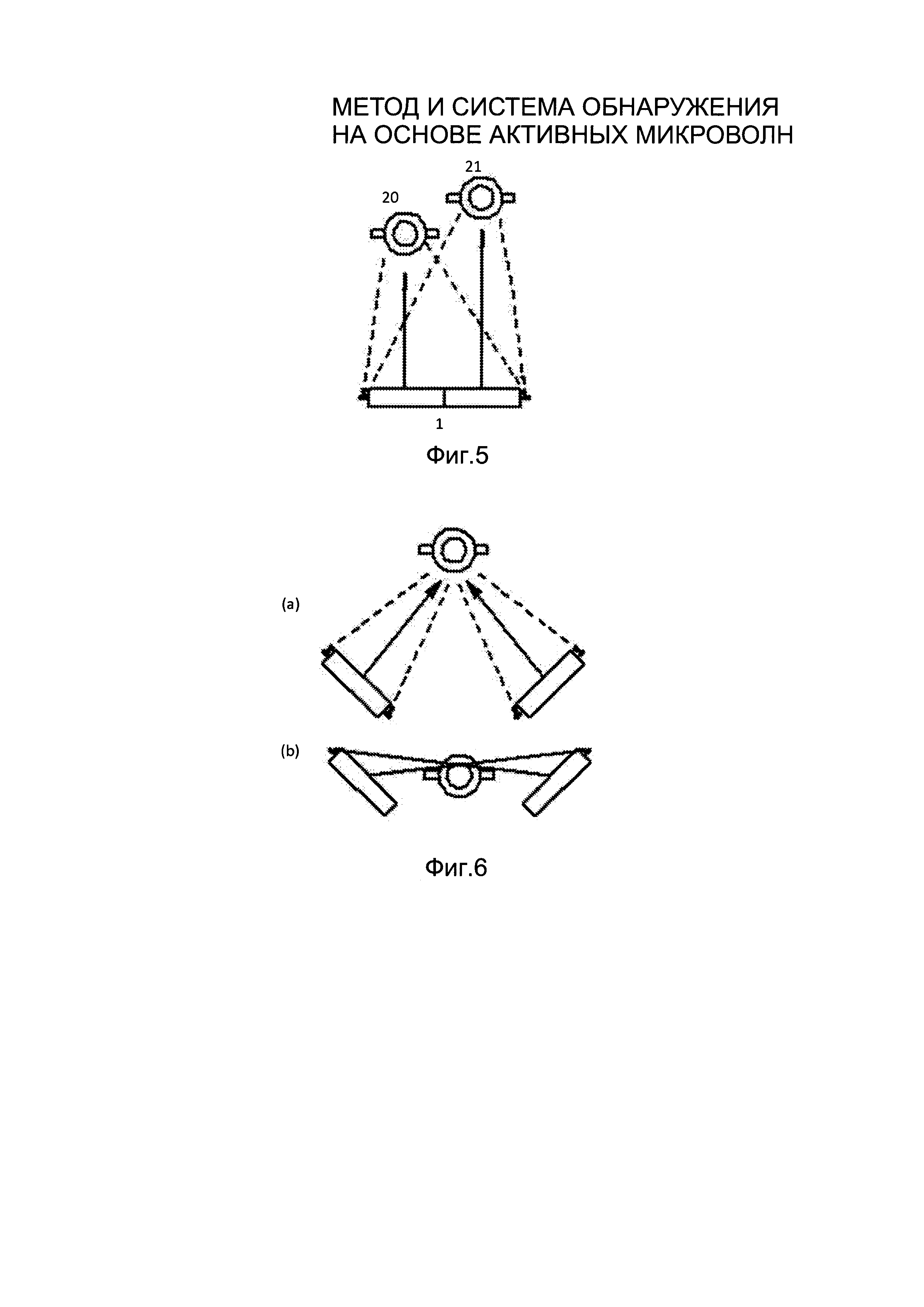
На Фиг. 5 показан вариант плоской конфигурации для настоящего изобретения.
На Фиг. 6 показана портальная конфигурация настоящего изобретения для (а) режима работы с отраженным и (в) режима работы с прошедшим излучением.
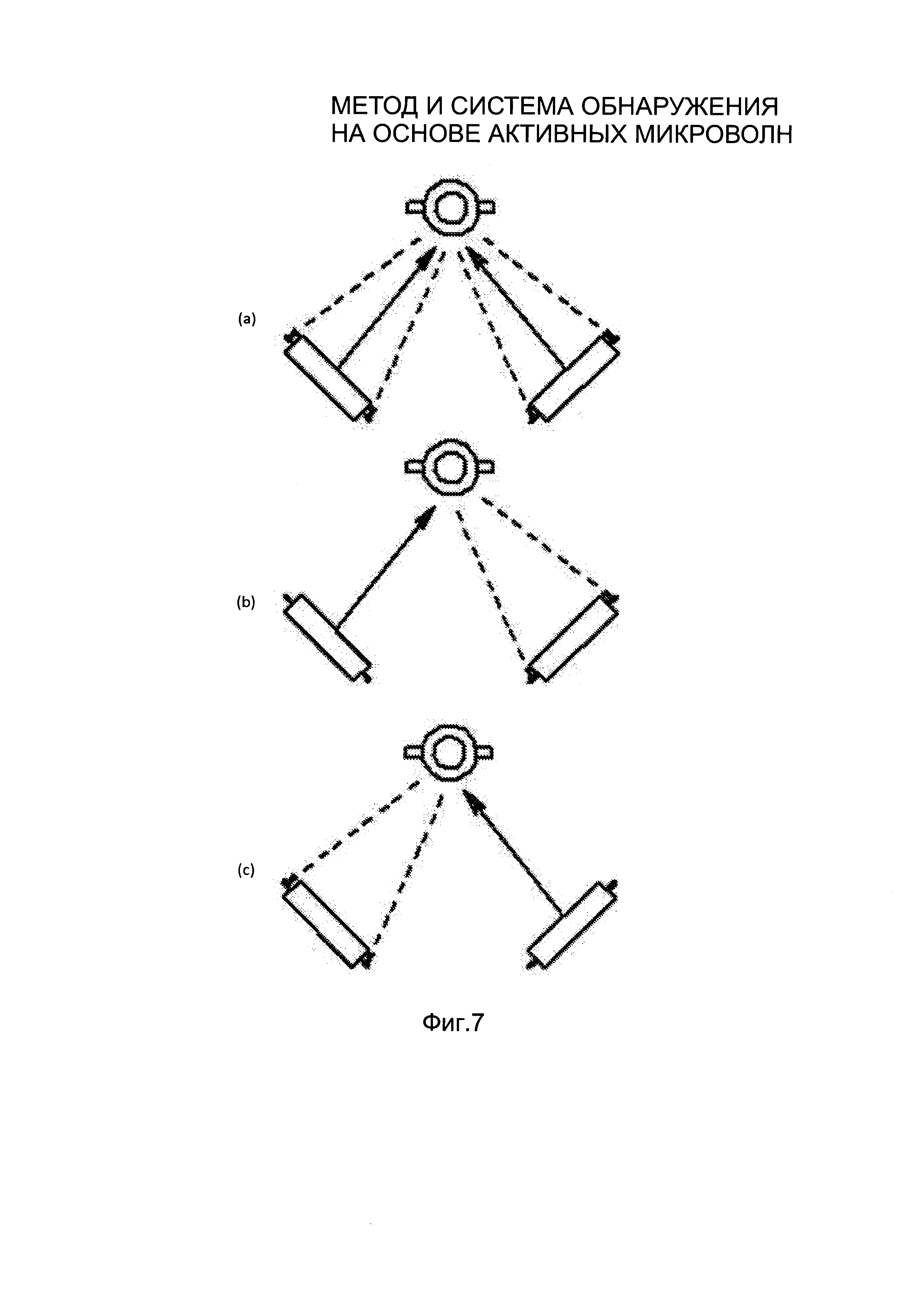
На Фиг. 7 показаны различные варианты построения микроволновых изображений для портальной конфигурации настоящего изобретения.
На Фиг. 8 показан вариант портальной конфигурации настоящего изобретения, использующий вдвое больше излучающих/принимающих антенных решеток.
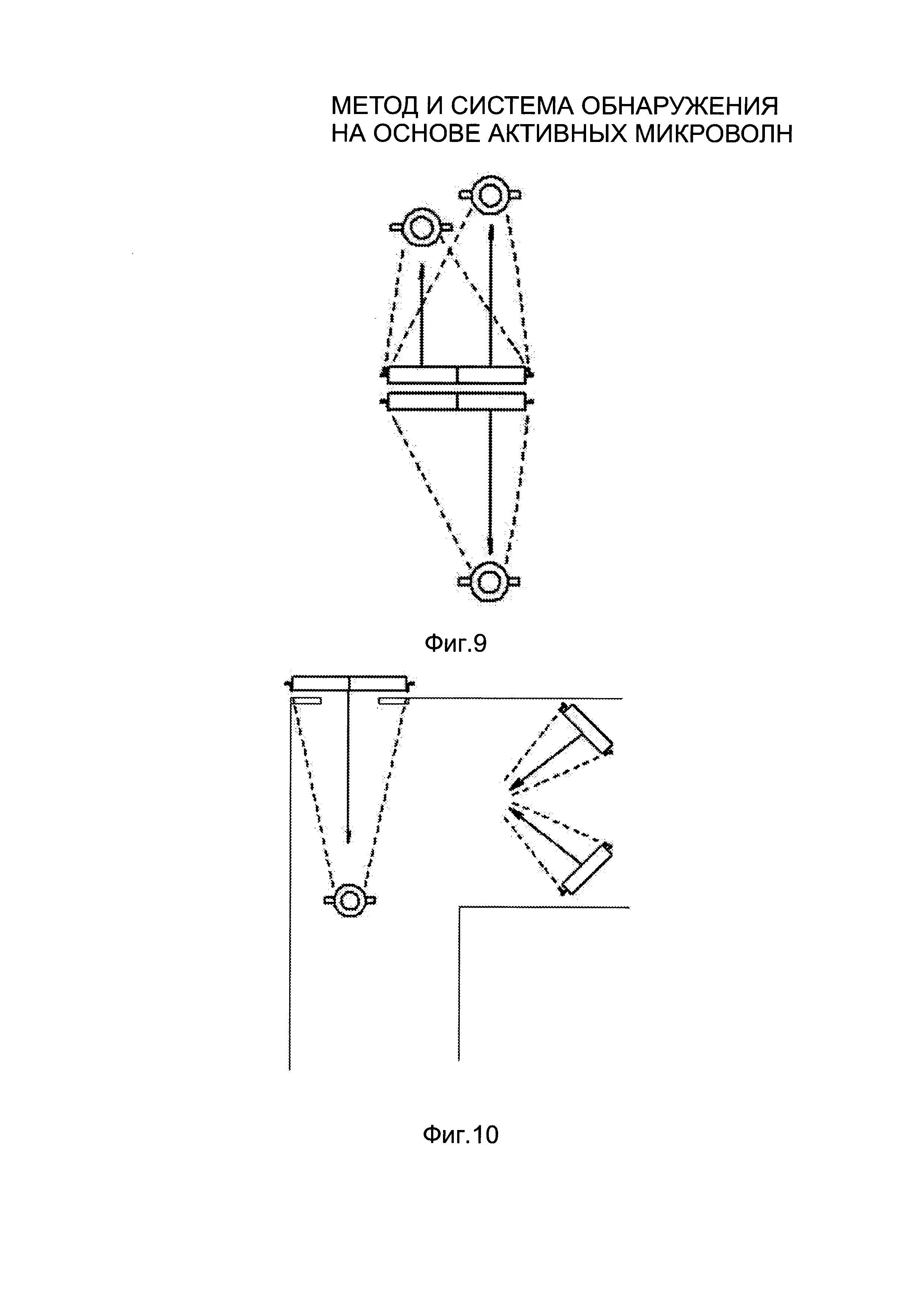
На Фиг. 9 показан вариант плоской конфигурации для настоящего изобретения, использующий вдвое больше излучающих/принимающих антенных решеток.
На Фиг. 10 показан пример того, как плоская и портальная конфигурации могут быть использованы одновременно.
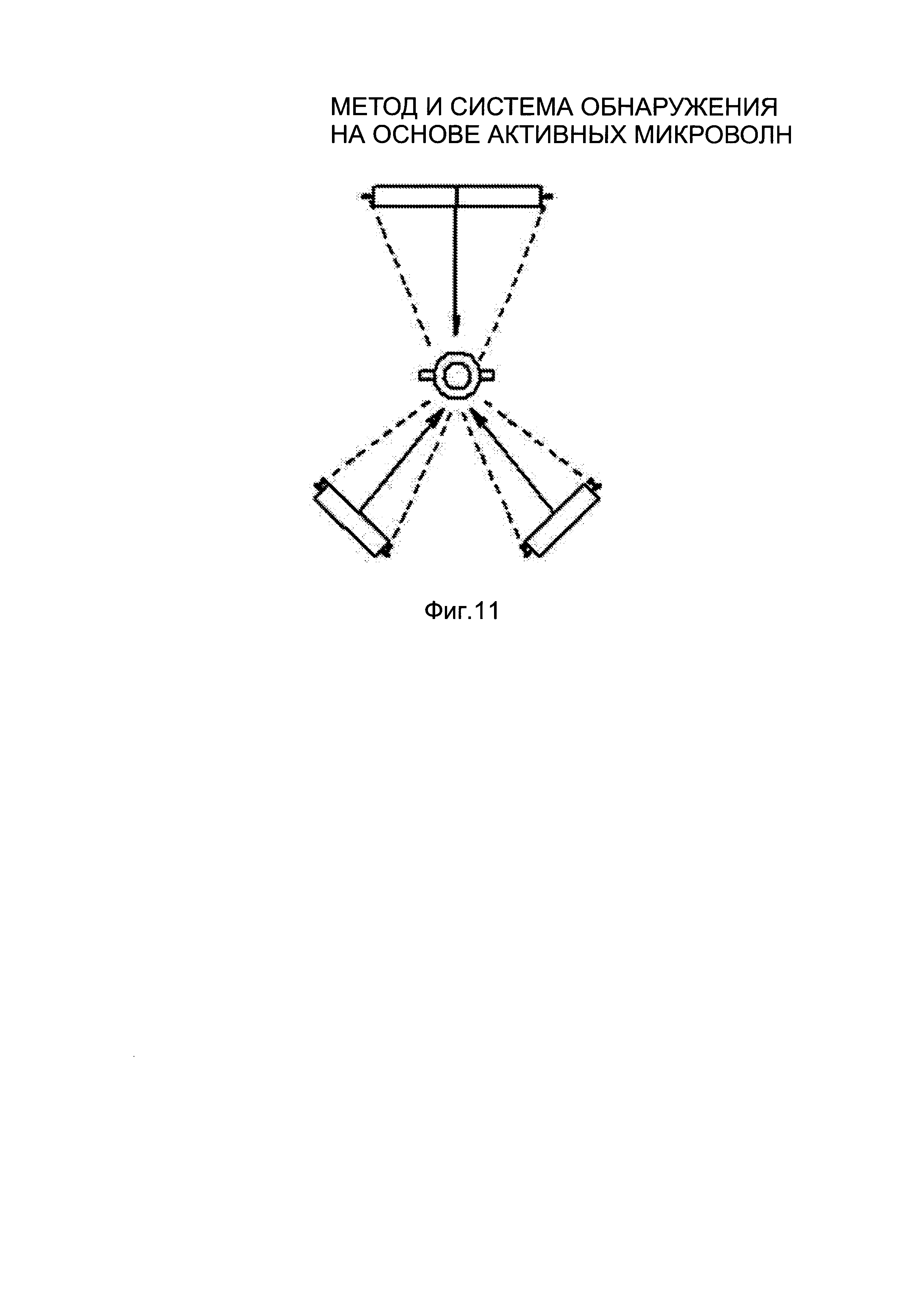
На Фиг. 11 показан другой вариант одновременного использования плоской и портальной конфигураций.
ДЕТАЛЬНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОЙ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
В данной заявке описывается Активное Микроволновое Устройство (АМУ) для дистанционного автоматического обнаружения СВУ (самодельное взрывное устройство) и других потенциально опасных диэлектрических объектов, переносимых на теле и скрытых под одеждой или в рюкзаках или другом багаже. АМУ работает, посылая микроволны (в диапазоне длин вол от 1 миллиметра до 20 сантиметров, но предпочтительно реализовать данное изобретение, используя микроволны в диапазон от 1 мм до нескольких см) в направлении движущейся цели (например, человека) и затем регистрируя отраженные волны. Данные анализируются в реальном времени при помощи высокоскоростного графического процессора, чтобы получить изображение потенциально скрытого объекта и информацию о его объеме и диэлектрических свойствах, что позволит отличить безопасный объект от потенциального взрывчатого вещества. Данная информация затем используется для автоматического определения уровня опасности найденной «аномалии» без привлечения оператора.
Данное изобретение представляет систему для обнаружения диэлектрического объекта в исследуемом пространстве, при этом исследуемое пространство располагается между внутренним и внешним слоем, включая по меньшей мере два микроволновых (MB) источника и по меньшей мере один MB приемник, которые позволяют формировать трехмерное MB изображение исследуемого пространства; при этом данные трехмерные микроволновые изображения формируются излучаемыми MB сигналами от MB источников, направленными на исследуемое пространство, при этом каждый MB сигнал частично отражается от внешнего слоя, а оставшаяся часть MB сигналов проходят через исследуемое пространство, при этом оставшаяся часть MB сигналов частично отражаются от внутреннего слоя, а указанные MB приемники получают отраженные от внешнего и внутреннего слоя сигналы; система также включает компьютер/вычислительное устройство, используемое для определения по меньшей мере двух расстояний Р1 и Р2 между по меньшей мере двумя наборами точек, при этом P1=(А2-А1) и Р2=(В2-В1); при этом А1 является точкой первого MB луча, отраженного от внешнего слоя, а А2 является точкой того же самого первого MB луча, отраженного от внутреннего слоя; при этом В1 является точкой второго MB луча, отраженного от внешнего слоя, и В2 является точкой того же самого второго MB луча, отраженного от внутреннего слоя, при этом по меньшей мере два набора точек располагаются друг от друга на предварительно заданном расстоянии S; также указанное устройство используется для расчета разницы D между Р1 и Р2 и для сравнения разницы D с предустановленным пороговым значением Т; система также включает систему оповещения, служащую для указания на потенциальное наличие скрытого диэлектрического объекта между внутренним и внешним слоем, если разница Р1 и Р2 больше, чем пороговое значение Т.
Также изобретение представляет метод обнаружения скрытых объектов в исследуемом пространстве, которое располагается между внутренним и внешним слоем, включает передачу микроволновых сигналов (MB) от MB источников в направлении исследуемого пространства, часть сигналов отражается от внешнего слоя, а часть от внутреннего; метод включает получение MB приемником первого и второго MB сигналов, отраженных обратно от внешнего и внутреннего слоя; первый и второй сигнал соответствует первому и второму трехмерному MB изображению, при этом первое трехмерное MB изображение соответствует внешнему слою исследуемого пространства, а второе трехмерное MB изображение соответствует внутреннему слою исследуемого пространства; включает определение по меньшей мере двух расстояний, Р1 и Р2, где Р1=(А2-А1) и Р2=(В2-В1); при этом А1 является точкой первого MB луча, отраженного от внешнего слоя, а А2 является точкой того же самого первого MB луча, отраженного от внутреннего слоя; при этом В1 является точкой второго MB луча, отраженного от внешнего слоя, и В2 является точкой того же самого второго MB луча, отраженного от внутреннего слоя; при этом А1 и В1 располагаются друг от друга на предварительно указанном расстоянии S; включает расчет разницы D между Р1 и Р2, сравнение разницы D с предустановленным пороговым значением Т; включает указание на то, что различие D превосходит предустановленное пороговое значение Т. В одной из реализаций метод также включает определение по меньшей мере третьего и четвертого расстояния Р3 и Р4 для третьего и четвертого сигнала, при этом Р3=(С2-С1) и Р4=(D2-D1), где С1 является точкой третьего MB луча, отраженного от внешнего слоя, С2 является точкой того же самого третьего MB луча, отраженного от внутреннего слоя; при этом D1 является точкой четвертого MB луча, отраженного от внешнего слоя, a D2 является точкой того же самого четвертого MB луча, отраженного от внутреннего слоя. Р3 и Р4 могут использоваться для повышения точности сигнала тревоги, когда разница между Р1 и Р2 больше порогового значения Т. Р3 и Р4 могут определяться в той же зоне, что и Р1 и Р2, но с других углов обзора. Р3 и Р4 также могут быть использованы для обнаружения скрытых объектов в других зонах, нежели зона, где определены Р1 и Р2.
Исследуемое пространство может находиться между телом человека и одеждой человека или между двумя слоями одежды. Внешний слой предпочтительно иметь как границу между воздухом и верхней одеждой человека. Схема 1 установки для обнаружения скрытых диэлектрических объектов показано на Фиг. 1. В одной реализации пространство облучается микроволновым излучением при помощи двух или более элементарных микроволновых излучателей 2 (На Фиг. 1 показаны 64 излучателя в качестве примера). Сигнал, отраженный от исследуемого пространства, приходит на один (или более) параллельный канал детектирования 3 и 4. Полученный сигнал проходит когерентную обработку в цифровом обработчике сигналов (ЦОС) 5 для получения значений максимальной интенсивности восстановленной конфигурации рассеивающих объектов в исследуемом пространстве в зависимости от расстояния от элементарных излучателей до цели. Информация, полученная после обработки, выводится на монитор 6 в виде восстановленного трехмерного микроволнового изображения.
В одной из реализаций метода изобретения цифровой обработчик сигналов (ЦОС) осуществляет когерентную обработку, при которой рассчитываются трехмерные MB изображения с учетом информации об амплитуде и фазе электромагнитных полей, отраженных от исследуемого пространства.
В другой реализации изобретения получается дополнительное видеоизображение цели при помощи двух или более видеокамер 7 и 8, которые синхронизированы с микроволновыми излучателями 2 через ЦОС 5. Полученное видеоизображение передается по каналам 9 и 10 на ЦОС 5, далее они преобразуются в цифровые, и затем получается трехмерное изображение цели, которое выводится на монитор 6. Трехмерное микроволновое и видеоизображение затем передаются в общую координатную систему, где они накладываются друг на друга (детальное описание приведено ниже). Точка наблюдения, или перспектива, для системы 1, как показано на Фиг. 1, дана с позиции положения досматриваемого человека.
Иногда в заявке дано указание на излучатель и излучающую антенну, а иногда на передатчик или передающую антенну. Данные термины излучатель/излучающая антенна/передатчик/передающая антенна взаимозаменяемы, если для квалифицированного специалиста из контекста, где использованы данные термины, не следует иного.
Трехмерное микроволновое изображение. Определение наличия потенциально опасного объекта, переносимого целью (человеком) 11 осуществляется следующим образом (Фиг. 2). Некоторые первично испущенные микроволны 12 частично отражаются первой (внешней) границей (обычно это пальто/куртка/верхняя одежда человека), формируя отраженный пучок 13 (см. Рис 3(a) - расширенный вид зоны N - для большей детальности). То же излучение/волна затем проходит через пальто до того момента, пока она не отразится от второй (внутренней) границы, человеческого тела, формируя второй отраженный пучок 14. Таким образом, происходит по меньшей мере два отражения одной волны - одно отражение от внешней границы цели и/или объекта (например, первая граница, или граница воздух/промежуточное пространство), а другое отражение происходит после того, как волна проходит через промежуточное пространство и отражается от тела цели (например, противоположная сторона скрытого диэлектрического объекта, при его наличии). Измеренное расстояние Р1 в промежуточном пространстве между первой и второй границей записывается и затем используется для определения наличия скрытых объектов, P1=(А2-А1) - расстояние между точкой А2 на второй границе и соответствующая точка А1 на первой границе. Данный процесс повторяется для измерения по меньшей мере еще одного расстояния и продолжается при необходимости измерения других расстояний, позволяя микроволновым пучка попадать и отражаться от различных точек на первой и второй границе. Каждый дополнительный микроволновый пучок, отраженный от дополнительной точки на первой и второй границах B1, C1, D1, … и В2, С2, D2, … позволяет измерить дополнительные расстояние Р2, Р3, Р4, … между первой и второй границами. Микроволновые сигналы испускаются и регистрируются постоянно, что позволяет воссоздать трехмерное микроволновое изображение исследуемого пространства. Первое трехмерное MB изображение соответствует первой границе, второе - второй границе. Данный метод позволяет определить наличие скрытых диэлектрических объектов на теле человека под верхней одеждой или переносимых на теле. Зона N увеличена и показана детально на Фиг. 3(a). Фиг. 3(a) иллюстрирует случай, в котором скрытый объект отсутствует. Фиг. 3(б) иллюстрирует то, как взрывчатое вещество проносится на теле под пальто. Предпочтительная реализация настоящего изобретения обнаруживает скрытые объекты, являющиеся взрывчатыми веществами или их компонентами. В одной реализации данного изобретения представленный метод используется для обнаружения скрытых взрывных устройств на теле террориста-смертника в толпе движущихся людей. Диэлектрическая постоянно взрывчатых веществ составляет 3. MB излучение, проходящее через среду с такой высокой диэлектрической постоянной, ведет себя так же, как если бы оно проходило сквозь воздух, но более длинное расстояние, и таким образом, изображение скрытого объекта показано как углубление на теле, что показано на Фиг. 3(с). Данное, кажущееся более длинным, расстояние, получается из-за резкого измерения длины пути микроволнового луча, что и регистрируется приемниками, поскольку MB луч в первой зоне 15 имеет удлинение пути по сравнению с MB лучом во второй зоне 16. Путем измерения фазы и амплитуды приходящих отраженных микроволн, можно определить путь микроволн (например, путь микроволнового луча/сигнала), а также зарегистрировать резкое изменение этого пути в определенных зонах, если оно есть. Поскольку микроволны распространяются медленнее в объекте с высокой диэлектрической константой (постоянной), они достигают второй границы позднее, что указывает на наличие в зоне объекта (по сравнению с зонами, в которых объекта нет, например, сверху, снизу или по сторонам от объекта). Если изменение значения пути волны превышает предустановленное пороговое значение, это служит указанием на наличие скрытого объекта.
В предпочтительной реализации пороговое значение Т соответствует разрешению системы по глубине в направлении, перпендикулярном первой и второй границам (т.е. внешнему и внутреннему слою, также называемым границами). В предпочтительной реализации изобретения разрешение составляет 1 см. Разрешение зависит от диапазона используемых MB частот. Разрешение равно скорости света в вакууме поделенной на двойной диапазон используемых MB частот. Диапазон MB частот обычно составляет 15 ГГц, что дает разрешение по глубине 1 см.
Дополнительный путь, h (см. Фиг. 3(д)), равен

Сигналы от первой и второй границы могут быть использованы для восстановления двух трехмерных MB изображений человека, одно будет соответствовать верхней одежде, а другое - телу человека, как описано выше. Однако, сигнал полученный от первой границы исследуемого пространства из-за малого его значения, может быть искажен боковыми полями (т.е. вторичными максимумами) сигнала от второй границы. Предпочтительно использовать дополнительно синхронизированное видеоизображение границы, если соотношение сигнал/шум очень низкое (см. Фиг. 1 и 4).
MB излучение, испускаемое с различных углов и отраженное излучение, также приходящее с различным углов, обрабатываются одинаковым образом, позволяя аккумулировать дополнительные данные для улучшения точности разрешения изображения и самого процесса обнаружения. Различные конфигурации системы описаны ниже.
Одновременное получение трехмерного MB и видеоизображения.
Дополнительно трехмерное видеоизображение цели может быть записано в то же время, что и MB изображение. В данной предпочтительной реализации изобретения метод, используемый в изобретении, таким образом, включает также формирование трехмерного оптического изображения внешнего слоя исследуемого пространства, позволяя синхронизировать трехмерное оптическое изображение и расположение точек A1, В1 и опционально С1 и D1, определять точки А1', В1' и опционально С1' и D1' на трехмерном оптическом изображении, которые соотносятся с точками A1, В1 и опционально С1 и D1, рассчитывать разницу Р1'=(А2-А1'), Р2'=(В2-В1') и опционально Р3'=(С2-С1') и Р4'=(D2-D1') и сравнивать значения P1 with Р1', Р2 с Р2' и опционально Р3 с Р3' и Р4 с Р4'. Таким же образом, система, заявленная как изобретение, описанная выше, которая также включает по меньшей мере две камеры, записывающие оптические изображения исследуемого пространства и адаптированные для формирования трехмерного оптического изображения исследуемого пространства; и компьютер, который адаптирован для синхронизации по времени и наложения цифрового изображения пространства трехмерного оптического изображения и трехмерного MB изображения, формируемого по меньшей мере двумя микроволновыми источниками и по меньшей мере одним микроволновым приемником для исследуемого пространства, при этом MB отражаются от внешнего слоя. Сигнал, отраженный от внешнего слоя (точки А1 и В1), может быть в несколько раз слабее по сравнению с сигналом, отраженным от внутреннего слоя (точки А2 и В2). Точки (А1', В1') внешнего слоя, выделенные на трехмерном оптическом изображении внешнего слоя исследуемого пространства (полученного стерео видеокамерами), может использоваться для расчета Р1' и Р2' и сравнения их с Р1 и Р2.
По преимуществу более 100 микроволновых источников использованы в данном методе, составляющем описываемое изобретение. Также предпочтительно использовать источники, которые имеют спектр, включающий множество частот.
По преимуществу по меньшей мере две видеокамеры 7 и 8 (см. Фиг. 1) записывают изображения цели, а ЦОС 5 восстанавливается трехмерное видеоизображение объекта. Оптические лучи не проходят через внешнюю границу (т.е., через верхнюю одежду человека в нашем примере). Данное трехмерное видеоизображение синхронизируется по времени с трехмерным микроволновым изображением. Наложение трехмерного видеоизображения и трехмерного MB изображения внешней границы позволит достичь большей точности при определении расположения внешней границы и улучшит расчет дополнительного пути h. В одной из реализации система также дополнительно оснащена автоматической системой тревоги, которая приводит в действие звуковое или визуальное оповещение, если расстояние h больше предустановленного порогового значения, и таким образом есть подозрение, что в зоне присутствует скрытый(-ые) объект(-ы).
В другой реализации автоматическая система тревоги включает также передачу фотографии подозреваемого, его/ее координаты и расположение скрытого(-ых) объекта(-ов), обнаруженных на его/ее теле офицеру безопасности или сотрудникам группы быстрого реагирования. Разрешение системы достаточно для обнаружения потенциально опасных объектов на теле человека без нарушения его личной неприкосновенности.
В еще одной реализации программное обеспечение для обработки микроволнового изображения подает сигнал тревоги, указываю только те части/объекты цели, которые вызывают подозрение (т.е. создают сигнал тревоги в системе путем обнаружения опасности на микроволновом изображении). И наконец, только эти части/объекты целей, которые опознаны как подозрительные, выбираются из видеоизображения обрабатывающим программным обеспечением. Таким образом, восстанавливается не полностью вся зона досмотра, но обрабатывающее программное обеспечение, для экономии ресурсов и времени, создает трехмерное микроволновое изображение с наложенным видеоизображением только для тех частей/объектов и областей, которые интересны с точки зрения безопасности и обнаружения потенциальной угрозы.
Конфигурации. АМУ может производиться в различных конфигурациях: (1) как портал для прохода для досмотра множества движущихся людей (предпочтительно таким образом, чтобы люди не перекрывали друг друга, т.е. шли один за другим или рядом); или (2) как единый модуль для дистанционного досмотра множества движущихся целей. АМУ может использоваться на объектах общественного транспорта в различных сценариях или как отдельная система или в комбинации с другими сенсорами, системой видеослежения или с системой сбора данных. АМУ может использоваться в комбинации с автоматическими дверями (например, с вращающимися входными дверями) или воротами, которые могут мгновенно блокироваться, если срабатывает сигнал тревоги, полученный от АМУ в реальном времени. Данный сценарий также позволяет мгновенно отделить подозрительного человека от других людей. В реализации данного метода по обнаружению скрытых объектов в исследуемом пространстве, исследуемое пространство статично или движется со средней скоростью пешехода не менее 2 км/ч или по меньшей мере 5 км/ч.
Достоинство представленного изобретения включает, но не ограничивается: (1) Дистанционный досмотр на расстоянии (к примеру, 10 метров); (2) Досмотр целей в реальном времени (десять или более кадров в секунду); (3) Досмотр множества целей одновременно (по меньшей мере 4-5 одновременно); (4) Скрытый досмотр и установка (устройство можно замаскировать, например, как рекламную панель); (5) Безопасную эксплуатацию и уровень излучения (общая мощность микроволнового излучения в 30 раз меньше, чем допустимо в общественных местах); (6) Избирательность по отношению к диэлектрическим объектам (диэлектрическая постоянная взрывчатого вещества около или выше 3, в то время как безопасные объекты имеют диэлектрическую постоянную 2,5 или меньше); (7) Избирательность по отношению к металлическим объектам; (8) Присвоение уровня опасности при обнаружении объекта; (9) Автоматическую систему распознавания угрозы; (10) Не нарушает личную неприкосновенность (разрешение трехмерного микроволнового изображения низкое, а системе автоматического оповещения об опасности не требуется выводить на монитор трехмерное изображение); (11) опционально - трехмерная видеосистема; и (12) Одновременный досмотр в реальном времени тела и переносимого багажа (например, ручной клади, чемоданов на колесиках и т.д.).
На Фиг. 4 представлена диаграмма с детальным изображением базового алгоритма, используемого обрабатывающим программным обеспечением. Данный алгоритм на заключительном этапе посылает сигнал тревоги о потенциально опасных диэлектриках или других взрывчатых веществах, находящихся или скрытых на досматриваемой цели, и используется для восстановления микроволнового изображения с наложением на видеоизображение для корреляции, обнаружения, быстрого определения координат и сбора опасного материала. Существует три блока, которые получают обрабатывают и/или передают информацию. Блок обработки микроволновых данных 100 включает центр сбора данных 110 и центр восстановления трехмерного микроволнового изображения 111. Блок обработки стерео-видеоизображения 200 включает центр сбора видеоданных 221, центр восстановления трехмерного видеоизображения 222 и блок определения целевой зоны 223. Блок анализа и принятия решения 300 включает центр анализа изображения 333, а также центры генерирующие сигнал тревоги 334 или сигнал об отсутствии опасности 335. Принимающие антенны 3, 4 получают данные о микроволнах, отраженных от и/или прошедших через цель и зону досмотра. Принимающие антенны 3, 4 передают эти данные в центр по сбору микроволновых данных 110, который в свою очередь далее передает эти данные в центр восстановления трехмерного изображения 111. Одновременно данные о стерео-видеоизображении, записанном видеокамерами 7,8 передаются в центр сбора видеоданных 221, который в свою очередь передает видеоданные в центр восстановления трехмерного видеоизображения 222. Центр восстановления трехмерного видеоизображения 222 затем посылает видеоданные в блок определения целевой зоны 223. Блок определения целевой зоны 223 связан с центром восстановления трехмерного микроволнового изображения 111, что позволяет соотнести (или синхронизировать) микроволновые данные с видеоданными, позволяя, таким образом, получить информацию соответствующую определенному временному отрезку, а затем он передает синхронизированные данные в блок анализа и принятия решения 300. Общие анализ трехмерных микроволновых изображений и трехмерных видеоизображений осуществляется центром анализа изображений 333, который получает данные от центра восстановления трехмерного видеоизображения 222 блока обработки стерео-видеоданных 200 (видеоданные до и после фильтруются блоком определения целевой зоны 223), а также от центра восстановления трехмерного микроволнового изображения 111 блока обработки микроволновых данных 100. Наконец, центр анализа изображений 333 определяет на основе всех полученных данных и используя описанные здесь методы, посылать сигнал тревоги 334 или сигнал отсутствия тревоги 335.
Автоматическое распознавание угрозы. Сигнал тревоги посылается в том случае, если после анализа объема, массы, формы и диэлектрической постоянной объекта или объектов, найденных на цели, например, скрытых под одеждой или в багаже, какой-либо параметр или комбинация параметров превышает или лежит в пределах установленных границ или предустановленных ограничений и порогов. Сигнал тревоги посылается автоматически после обработки трехмерного микроволнового изображения (и видеоизображений) без участия оператора. Сигнал тревоги может посылаться по беспроводным сетям, кабельным сетям и мобильным сетям, на указанный монитор/компьютер любой системы наблюдения, безопасности или комплексной системы видеонаблюдения. В дополнение к автоматическому сигналу тревоги в реальном времени может быть также выслано фото/видеоизображение потенциальной угрозы (и человека, несущего данную угрозу), включая координаты его/ее нахождения.
Дистанционное обнаружение на расстоянии (до 10 метров). Для того чтобы получить наименьшее микроволновое изображение, требуется по меньшей мере одна передающая и две принимающих антенны, или наоборот, т.е. одна принимающая и две передающих. Для того, чтобы обнаружить объекты, скрытые на движущихся на каком-то расстоянии целях рекомендуется использовать решетку (или множество) передающих и принимающих антенн, а не просто один описанный выше набор. Решетка передающих и принимающих антенн расширяет зону досмотра, увеличивает разрешение системы, поскольку увеличивает апертуру системы и улучшает соотношение сигнал/шум. Например, одна из реализаций антенной решетки включает 256 элементов, которые составляют 16 линеек антенны. Каждая линейка включает 16 элементарных антенн (16×16). Данная решетка также включает отдельные антенны, которые по преимуществу располагаются на расстоянии меньшем, чем половина длины волны для максимальной частоты из используемого диапазона частот. Это требуется для получения однозначного восстановленного трехмерного микроволнового изображения.
Излучение элементарной антенны постоянное (или импульсное). Отраженный сигнал регистрируется одновременно всеми принимающими антеннами. Если используется несколько излучающих антенных решеток, работающих одновременно, для различения сигналов, приходящих с различных излучающих антенных решеток, используется низкочастотная модуляция. Для улучшения соотношения сигнал/шут одна элементарная антенна из антенной решетки может испускать сигнал в один момент на одной из выбранных частот 16/32. Ширина излучения узкая (т.е. ширина на 3 порядка меньше, чем значение частоты), что позволяет сигналу не сливаться с внешними и фоновыми частотами.
Принимающая антенная решетка включает отдельные антенны, расположенные таким образом, что зона, в которой принимаются отраженные сигналы (охват антенны), позволяет получить трехмерное микроволновое изображение с различных сторон (или углов зрения) на движущуюся(-иеся) цель(-и). Количество отдельных антенн определяется желаемым качеством синтезируемой апертуры, разрешением, соотношением сигнал/шум и ресурсами. Скорость восстановления трехмерного микроволнового изображения в реальном времени может составлять 10 кадров/секунду. Скорость записи распределения амплитуды-фазы для всех пар [1024×8] приемо-передающих антенн и на всех 16/32 выбранных частотах позволяет рассматривать движущиеся цели как практически или близкие к статическим во время записи одного кадра. Скорость обработки данных и восстановления трехмерного микроволнового изображения (кадра) определяется наличествующими ресурсами. Полученная скорость 10 кадров/изображений в секунду, например, достигается благодаря распределению вычислительных ресурсов между различными процессорами (и благодаря параллельным расчетам), которые работают одновременно над различными задачами, которые могут включать процесс сбора данных, восстановление и обработку трехмерных микроволновых изображений, обработку и синхронизацию трехмерных видеоизображений.
Досмотр в реальном времени и уровень обнаружения. Здесь дано объяснение примерных условий для сбора и обработки данных, а также скорость сбора и обработки данных для движущейся цели, наблюдаемой данным изобретением: время, необходимое для получения одного кадра (т.е. для получения данных о распределении амплитуды-фазы для всех пар [1024×8] приемо-передающих антенн и на всех 16/32 выбранных частотах для восстановления трехмерного микроволнового и видеоизображения в данной реализации системы), должно быть меньше, чем время, нужное цели, чтобы сместиться на 1/8 длину волны на максимальной частоте из используемого диапазона частот. Время для измерения одного кадра - менее 2 миллисекунд. Обработка кадра (восстановление до 100×100×32 (В×Ш×Г) точек на трехмерном микроволновом и видеоизображении) занимает около 100 миллисекунд. Одна восьмая (1/8) длины волны на максимальной частоте (т.е. 18 ГГц или 1,6 см) составляет около 0,2 сантиметров. Средняя скорость движения цели, к примеру, 5 км/ч (или 1,4 м/с или 0,14 см/мс). В настоящий момент скорость сбора и обработки данных, достижимая для представленного изобретения, составляет около 10 кадров в секунду.
Одновременный досмотр нескольких целей. Если в исследуемом пространстве находится или движется несколько целей, система работает и данные собираются таким же образом и за то же время, как и в случае с одиночной целью. Однако, когда система осуществляет восстановление трехмерного микроволнового или видеоизображения, она автоматически регистрирует положение всех целей и объектов в зоне досмотра, что требует больше вычислительных ресурсов. Таким образом, восстановление трехмерного микроволнового и видеоизображения предпочтительно осуществлять, также в реальном времени, регулируя отдельно качество, скорость или разрешение, что позволит сохранить скорость расчетов. Например, скорость расчетов можно сохранить снизив частоту восстановления кадров (например, с 10 кадров до 5 кадров в секунду) или снизив количество точек восстанавливаемого микроволнового изображения. Альтернативным вариантом является увеличение вычислительных ресурсов, что решило трудности работы с множественными целями без необходимости снижения качества, скорости или разрешения. Использование видеоданных также может помочь снизить объем непосредственно обрабатываемых микроволновых данных (например, исследуется только область, где обнаружены объекты), таким образом, досмотр будет проходить отдельно, но одновременно для каждой из обнаруженных целей.
Сигнал тревоги подается после анализа, проведенного блоком анализа и принятия решения. Данный блок анализирует кадры, сохраненные в памяти компьютера и выбирает цели с «опасными» объектами. «История» кадров постоянно записывается и хранится в памяти компьютера. На каждом кадре или группе кадров стоит временная отметка, указывающая, когда он был получен. Сигнал тревоги подается и срабатывает автоматически в реальном времени. Возможная задержка на долю секунды, по сравнению с моментом получения кадра, что обусловлено тем, что обрабатываются несколько кадров из «истории». «История» кадров остается в памяти компьютера в течение времени, пока цели остаются или движутся через зону досмотра. Если в зоне досмотра в момент времени никого нет, то система переходит в режим ожидания. Система автоматически переключается в режим сбора данных и начинает их обработку, как только цель(-и) появляются в зоне досмотра. Когда цель(-и) движется через зону досмотра (на расстоянии до 10 метров от устройства), система в среднем принимает, восстанавливает и записывает в «историю» около 100 кадров (со скоростью 10 кадров в секунду). Цель (например, человек) на этих кадрах показывается с различным углов, как его/ее «видит» антенна во время его/ее движения. Если цель движется во время процесса обработки кадров, при этом обработка включает кадры, записанные в «историю» кадров, то обнаружение скрытых объектов возможно - объекты не обнаруживаются, если человек стоит на месте.
Скрытая установка и досмотр. Для того чтобы сделать работу системы незаметной, ее можно замаскировать как обычную рекламную панель. Панель может быть сделана из материалов, прозрачных для микроволн (например, пластик, дерево, ткань и т.д.)
Трехмерная видеосистема. Предпочтительно в данном изобретении использовать трехмерную видеосистему. Предпочтительно использовать по меньшей мере 2 видеокамеры, что позволит восстановить «карту глубины» досматриваемой зоны в реальном времени. Карта глубины используется вместе с трехмерным микроволновым изображением в процессе обработки и в процессе формирования общей синхронизированной координатной системы. Трехмерное изображение используется: (1) для обнаружения/определения положения людей в зоне досмотра; (2) для локализации и ограничения определенных областей/зон внутри зоны досмотра, для которых необходимо восстановление микроволнового изображения найденного объекта (например, объекты, спрятанные на теле человека или в багаже), его обработка и/или синхронизация; (3) для получения первой границы (т.е. воздух/граница диэлектрика) на микроволновом изображении, что то же самое, что и «одежда/граница диэлектрика» на видеоизображении (4) для передачи ответственному персоналу автоматического сигнала тревоги и фото/видео данных о потенциальной угрозе (например, о террористе), включая, но исчерпываясь, координаты его/ее положения в пространстве. Фото/видеоизображения могут быть цветными или черно-белыми. В то время как цель(-и) движутся в зоне досмотра или в зоне работы микроволновой/видеосистемы, компьютер может сохранять в памяти микроволновые и видеоизображения (например, 10 кадров в секунду), полученные системой с различных точек или углов зрения. Данная информация лучше и полезнее, чем информация о статичной (неподвижной) цели в зоне досмотра. Алгоритм обнаружения использует информацию о движущейся цели (что лучше) для анализа нескольких сохраненных в «истории» кадров. Чем больше есть кадров с различных углов, тем больше информации есть у системы для автоматического обнаружения опасного объекта, и тем эффективнее и точнее будет процедура обнаружения.
Конфигурация АМУ. Настоящее изобретение может работать (1) постоянно или (2) в режиме ожидания, активируется внешним воздействием (например, когда цель попадает в зону досмотра или зону охвата микроволновой/видеосистемы). Установка может работать как в помещении, так и на улице, в различных условиях освещенности (например, если света мало, можно использовать ИК-камеры). Система может быть настроена для использования в различных конфигурациях (передающие и принимающие антенные решетки могут располагаться по-разному относительно друг друга) в зависимости от конкретного сценария и места использования.
«Плоская» конфигурация (см. Фиг. 5) относится к системе, когда передающие и принимающие антенные решетки зафиксированы на одной раме или модуле конфигурации 1. В «плоской» конфигурации система использует только одну технологию для обнаружения потенциально опасных объектов, скрытых на цели или в багаже (например, в рюкзаке, сумке, чемодане и т.д.), при этом это технология «отражения» первичного излучения (испускаемого микроволновой антенной решеткой) от цели. В «плоской» конфигурации зона досмотра шире, чем в «портальной» конфигурации (объяснение дано ниже), таким образом, эта конфигурация потенциально больше подходит для дистанционного обнаружения опасных объектов на человеке 20 или нескольких людях 20 и 21 одновременно на расстоянии нескольких метров. При использовании «плоской» конфигурации можно получить трехмерно MB изображение, а расчет наличия скрытого диэлектрического объекта зависит от фазовой разницы между отражения от первой и второй границы цели. Следует отметить, что большее количество приемников и передатчиков, расположенных под различными углами к зоне досмотра и к цели, обеспечат более точные и информативные результаты.
«Портальная» конфигурации (см. Фиг. 6) относится к системе, когда приемные и передающие антенны располагаются по обе стороны от так называемого «портала» (т.е. зоны прохода), при этом они расположены под углом к направлению движения цели(-ей). В данной конфигурации система использует две технологии для обнаружения потенциально опасных объектов, скрытых на цели или в багаже. Первая технология «отражения» первичного излучения (испускаемого решеткой микроволновых антенн) от цели(-ей), и вторая технология «прохождения» первичного микроволнового излучения сквозь объект. На Фиг. 6(a) показано как используется технология «отражения», в то время как на Фиг. (б) показано использование технологии «прохождения». При помощи технологии отражения, обнаружение скрытых объектов осуществляется в чем-то схожим образом, что и в «плоской» конфигурации системы (т.е. на основании разницы фаз отраженных микроволн). В случае с технологией «прохождения», микроволновый сигнал проходит через скрытый диэлектрический объект, если он есть, и таким образом, микроволны не отражаются. Вместо этого приемники/регистрирующие микроволны устройства располагаются напротив передатчиков сигнала, чтобы получить микроволновой сигнал, прошедший через скрытый диэлектрический объект, расположенный на теле или в багаже. Обнаружение объекта и расчет толщины осуществляются путем измерения задержки фазы, если она есть, волны, проходящей через объект. На основе технологии «прохождения» не происходит восстановления трехмерного MB изображения; вместо этого, просто измеряется задержка фазы микроволн, прошедших через скрытые объекты, если таковые есть. Задержка фазы обусловлена прохождением микроволн через среду с высокой диэлектрической постоянной (например, около 3 для взрывчатых веществ). Следует снова отметить, что чем больше приемников и передатчиков (например, расположенных иначе, чем прямо перпендикулярно направлению движущейся цели) располагается под различными углами к зоне досмотра, тем более точными и информативными будут результаты.
В «портальной» конфигурации системы алгоритм обнаружения обрабатывает данные, полученные обеими технологиями. Система подает сигнал тревоги на основе данных, полученных только от одной из технологий (прохождения или отражения), или альтернативно, система может посылать общий сигнал тревоги, который определяется на основе логики «ИЛИ», применяемой к обоим сигналам (если есть сигнал тревоги от одной из технологий). Алгоритм обнаружения использует одновременно данные из одного или нескольких микроволновых изображений, полученных технологией «отражений». Различные микроволновые изображения формируются, пока сигнал испускается/принимается антеннами, расположенными на одной половине указанного портала, с левой или с правой стороны относительно направления движения цели(-ей). Перекрестные микроволновые изображения формируются, пока сигнал испускается/принимается передающими/принимающими антеннами, расположенными в различных блоках (половинах портала). Когда сигнал испускается левой частью портала, правая часть регистрирует его, и наоборот (см. Фиг. 7).
Использование нескольких микроволновых изображений для анализа (полученных с левых и правых частей портала и от перекрестных изображений) позволяет набрать больше углов, с которых видно тело цели (например, человека) и скрытые объекты, что повышает точность автоматической системы тревоги и уровень обнаружения. Таким образом система может обнаруживать объекты, которые могут быть скрыты от одной части портала, например, находится сзади, сбоку или спереди от цели. В «портальной» конфигурации алгоритм обнаружения позволяет одновременно обнаруживать объекты, расположенные сбоку или спереди на цели, используя технологию «отражения», и сзади и сбоку на цели, используя технологию «прохождения». В «портальной» конфигурации с удвоенным числом передающих/принимающих антенных решеток (см. Фиг. 8), расположенных попарно с различных сторон (например, слева и справа) относительно направления движения цели, изображения целей получаются с различных углов досмотра и со всех сторон (спереди, сзади, слева и справа). Алгоритм обнаружения позволяет обнаруживать объекты по бокам или спереди и сзади на теле при работе технологии «отражения», и спереди/сзади на теле при работе технологии «прохождения». В таком случае (Фиг. 8) количество одиночных и перекрестных изображений увеличивается, что повышает в свою очередь точность автоматического сигнала тревоги и уровень детектирования. Объекты, скрытые в любом месте на теле могут быть обнаружены (т.е. используется псевдо-трехмерное голографическое изображение).
В «плоской» конфигурации при использовании удвоенного числа передатчиков/приемников, когда первые и вторые блоки испускают/принимают микроволновое излучение в/с разных направлениях, опасные объекты спереди на цели обнаруживаются, когда цель движется по направлению к системе, в то время как объекты сзади на теле (например, рюкзак) обнаруживаются, когда цель уходит от системы. В таком типе «плоской» конфигурации обнаружение осуществляется спереди и сзади одновременно (см. Фиг. 9).
Дополнительно существуют сценарии, когда две конфигурации системы могут использовать в комбинации (т.е. по меньшей мере одна «портальная» конфигурация и одна «плоская». Следующие две реализации представляют собой пример, но не исчерпывающий, того, как система в конфигурации «плоскость» и «портал» может быть объединена для дальнейшего обнаружения:
В конфигурации «плоскость» осуществляется первичное дистанционное обнаружение опасных объектов на теле движущегося человека. Автоматический сигнал тревоги посылается на «портальную» систему, которая, используя две технологии (отражения и прохождения), досматривает либо все цели в зоне досмотра, либо только те цели, которые были отобраны системой в «плоской» конфигурации. В данном сценарии (см. Фиг. 10 и 11, например, показывающие различные конфигурации), вероятность и точность обнаружения опасного объекта повышается, а уровень ложных срабатываний низкий. Низкий уровень ложных срабатываний - это очень важный аспект, особенно для систем обнаружения, работающих на объектах общественного транспорта или в местах с интенсивным пассажиропотоком. Высокий уровень ложных срабатываний потенциально привел бы к невозможности нормальной работы общественного транспорта, нарушил бы схему проведения общественного мероприятия и т.д.
В «портальной» конфигурации осуществляется первичное обнаружение опасных объектов, скрытых спереди или сзади на движущейся цели, при этом используются две технологии (отражения и прохождения). Автоматический сигнал тревоги посылается на систему в «плоской» конфигурации, которая производит подтверждающий досмотр либо всех целей в зоне досмотра, либо только тех целей, которые были отобраны системой в «портальной» конфигурации. В данном сценарии (см. Фиг. 10 и 11, например, показывающие различные конфигурации) вероятность и точность обнаружения опасного объекта также повышается, а уровень ложных срабатываний тоже сравнительно мал. Для реализации сценария данного типа, после системы в конфигурации «портал» можно установить автоматическую дверь, ворота, барьер и т.д., чтобы разделить людей на два потока. Первый поток будет включать цели, на которых первая система обнаружила опасные объекты, и эти цели будут посылаться ко второй системе в другой конфигурации («плоскость» или «портал») на подтверждающий досмотр.
Когда несколько систем в конфигурациях «плоскость» или «портал» работают одновременно в различных частях исследуемого пространства (например, транспортные станции или проходы на общественные мероприятия) и обнаруживают опасный объект, посылается сигнал тревоги на центральную панель управления системой безопасности. Вместе с сигналом тревоги, передается также информация с номером сработавшего устройства, фото/видеоизображения и координаты подозрительной цели. В особых случаях систему можно оборудовать специальными механическими устройствами, дверями, вращающимися дверями, барьерами и т,д., которые могут использоваться для автоматической блокировки, перенаправления, разделения или изоляции подозрительных целей/людей в случае срабатывания сигнала тревоги. Чем больше используется систем, которые управляются и подключены к одному блоку управления и обработки данных, тем более эффективно можно распределять ресурсы, используемые для обработки данных, и тем выше вероятность и точность обнаружения, при этом одновременно тем ниже будет уровень ложных срабатываний.
В предпочитаемом методе, относящемся к настоящему изобретению, MB излучение испускается передатчиком и проходит через зону досмотра, не отражаясь от двух слоев, и оно используется для улучшения точности метода путем регистрации на дополнительном приемнике амплитуды и фазы MB излучения, которое прошло через зону досмотра без отражения, в то время как амплитуда и фаза MB излучения, прошедшего через исследуемую зоны, используется для определения изменения длины оптического пути MB излучения, проходящего через зону досмотра, и сравнения этих значений со значениями для излучения, прошедшего через свободное пространство между передатчиком и дополнительным приемником.
В соответствии с данным изобретением, система по преимуществу включает дополнительный MB приемник, регистрирующий MB сигнал, прошедший через исследуемое пространство и через внутренний и внешний слои без отражения; сигнал тревоги используется для указания на возможное присутствие скрытого диэлектрического объекта между внутренним и внешним слоем, если дополнительный приемник зарегистрировал увеличение (или изменение) длины оптического пути из-за присутствия объекта с повышенной диэлектрической постоянной в области досмотра.
Безопасная эксплуатация и излучение. Общая мощность микроволнового излучения данного изобретения 2 В/м (10 ГГц), что в 30 раз меньше, чем допустимое для общественным мест значение (61 В/м).
Личная неприкосновенность. Разрешение трехмерного микроволнового изображения низкое, а автоматическая система определения уровня опасности не выводит трехмерное изображение на монитор. Для формирования сигнала тревоги в автоматическом режиме (автоматическая система определения уровня опасности) не обязательно, чтобы оператор просматривал двумерные/трехмерные микроволновые или видеоизображения на мониторе самостоятельно. Разрешение микроволнового изображения, к примеру, 4 см (относительно используемого диапазона частот), поэтому невозможно показать/записать изображение каких либо частей тела человека, который находится в зоне работы установки.
Разрешение систему. Разрешение системы в конфигурации «плоскость» определяется средней частотой (13 ГГц), расстоянием до объекта и имеющимся размером апертуры (например, разрешение системы в конфигурации «плоскость» составляет 4×4 см при расстоянии 1 метр, без учета синтеза апертуры). Разрешение системы в направлении перпендикулярном первой и второй границам определяется диапазон используемых частот (8-18 ГГц) (например, разрешение системы по глубине 1 или 1,5 см).
Описание предпочтительной реализации изобретения представлено в иллюстративных и описательных целях. Оно не предписывает и не ограничивает возможные формы реализации изобретения теми, что здесь описаны. Очевидно, для квалифицированных специалистов в данной области может быть ясно, что возможны множественные модификации и вариации.
Настоящее изобретение также имеет отношение к:
Реализация 1: Метод обнаружения скрытых диэлектрических объектов в исследуемом пространстве, включающий:
передачу микроволновых (MB) сигналов от MB источников в направлении досматриваемого человека, сигнал частично отражается от первой границы между воздухом и внешней границей промежуточного пространства, остальная часть сигнала почти полностью отражается от второй границы между промежуточным пространством и телом человека,
получение от MB приемника первого и второго ответного MB сигнала, отраженных от первой и второй границы; первый и второй ответный сигнал соответствуют первому и второму трехмерному MB изображению досматриваемого человека;
определение по меньшей мере двух оптических путей, Р1 и Р2, между по меньшей мере двумя наборами точек, где P1=(А2-А1) и Р2=(В2-В1); при этом А1 является точкой первого MB луча, отраженного от первой границы, а А2 является точкой того же самого первого MB луча, отраженного от второй границы; при этом В1 является точкой втор MB луча, отраженного от первой границы, и В2 является точкой того же самого второго MB луча, отраженного от второй границы, а оптический путь - путь микроволнового излучения в среде, составляющей промежуточное пространство;
определение наличия скрытого диэлектрического объекта между первой и второй границами, если разница между Р1 и Р2 больше, чем пороговое значение из-за высокого значения диэлектрической константы в промежуточном пространстве между В2 и В1.
Реализация 2: Метод реализации 1, при котором пороговое значение составляет около 1 см.
Реализация 3: Метод реализации изобретения 1 или 2, также включающий формирование третьего и четвертого трехмерного MB изображение на основе третьего и четвертого ответных сигналов; при этом третий и четвертый ответные сигналы получаются с углов, отличных от углов, с которых получены первый и второй ответные сигналы, а также определение по меньшей мере еще двух оптических путей, Р3 и Р4, при этом Р3=(С2-С1) и Р4=(D2-D1), а С1 является точкой третьего MB луча, отраженного от первой границы, и С2 является точкой того же самого третьего MB луча, отраженного от второй границы; при этом D1 является точкой четвертого MB луча, отраженного от первой границы, a D2 является точкой того же самого четвертого MB луча, отраженного от второй границы, что позволяет повысить качество изображения и несет добавочную информацию для определения наличия скрытых диэлектрических объектов.
Реализация 4: Метод реализации изобретения от 1 до 3, также включающий использование MB излучения, проходящего через промежуточное пространство без отражения от человеческого тела путем:
регистрации амплитуды и фазы MB излучения, прошедшего через промежуточное пространство без отражения от человеческого тела;
определения наличия скрытого диэлектрического объекта, если в зарегистрированном сигнале задержка фазы превышает установленный фазовый порог, задержка же может происходить из-за прохождения промежуточного пространства, имеющего повышенную диэлектрическую константу.
Реализация 5: Метод реализации изобретения от 1 до 4, также включающий трехмерное изображение досматриваемого человека в видимом диапазоне, синхронизацию трехмерного изображения в видимом диапазоне с трехмерным MB изображением в той же временной точке и наложение трехмерного оптического изображения на трехмерное MB изображение, что повышает точность определения наличия скрытого диэлектрического объекта.
Реализация 6: Метод реализации изобретения от 1 до 5, в котором скрытые объекты являются взрывчатыми материалами или их компонентами.
Реализация 7: Метод реализации изобретения от 1 до 6, в котором MB источники имеют спектр, включающий множество частот.
Реализация 8: Метод реализации изобретения от 1 до 7, в котором MB источники могут сканировать область пространства, получая ее изображения.
Реализация 9: Метод реализации изобретения от 1 до 8, в котором более чем more than MB источников используются для формирования трехмерных изображений.
Реализация 10: Метод реализации изобретения от 1 до 9, в котором процессор цифровой обработки сигналов (ЦОС) осуществляет когерентную обработку, рассчитывая трехмерное MB изображение, с учетом данных об амплитуде и фазе электромагнитных полей, отразившихся от досматриваемого человека.
Реализация 11: Метод реализации изобретения от 1 до 10, в котором метод используется для обнаружения скрытых бомб на теле террориста-смертника в толпе движущихся людей.
Реализация 12: Метод реализации изобретения от 1 до 11, в котором метод используется для сканирования по меньшей мере двух досматриваемых людей одновременно.
Реализация 13: Метод реализации изобретения от 1 до 12, в котором досматриваемый человек движется по меньшей мере со скоростью 5 км/ч.
Реализация 14: Система для обнаружения скрытых диэлектрических объектов в исследуемом пространстве, включающая:
по меньшей мере два микроволновых (MB) источника и по меньшей мере один MB приемник, формирующих трехмерное MB изображение исследуемого пространства;
в которой указанные трехмерные микроволновые изображения получаются на базе MB сигналов, испускаемых MB источниками в направлении досматриваемого человека, при этом MB сигнал частично отражается от первой границы между воздухом и промежуточным пространством, а остальная часть MB сигналов проходит через промежуточное пространство, и остаточная часть MB сигналов почти полностью отражается от второй границы между промежуточным пространство и телом досматриваемого человека, при этом указанный MB приемник регистрирует сигналы, отраженные от первой и второй границ;
компьютер/вычислительное устройство для определения по меньшей мере двух оптических путей, Р1 и Р2, между по меньшей мере двумя наборами точек, при этом Р1=(А2-А1) и Р2=(В2-В1); при этом А1 является точкой первого MB луча, отраженного от первой границы, а А2 является точкой того же самого первого MB луча, отраженного от второй границы; при этом В1 является точкой второго MB луча, отраженного от первой границы, и В2 является точкой того же самого второго MB луча, отраженного от второй границы, при этом оптический путь - это путь микроволнового излучения в среде, составляющей промежуточное пространство;
а также систему тревоги для подачи сигнала о вероятном наличии скрытого диэлектрического объекта, располагающегося между первой и второй границами, если разница между Р1 и Р2 больше, чем пороговое значение, что обусловлено повышенным значением диэлектрической постоянной в промежуточном пространстве между точками В2 и В1.
Реализация 15: Система из реализации 14, также включающая:
по меньшей мере две камеры для записи оптических изображений досматриваемого человека и для формирования трехмерных изображений досматриваемого человека в видимом диапазоне,
и компьютер для синхронизации во времени и цифрового пространственного наложения трехмерного изображения в видимом диапазоне и трехмерного MB изображения, являющегося отражением сигнала от первой границы, что повышает точность определения положения первой границы и улучшает точность обнаружения скрытых объектов.
Реализация 16: Система из реализации 14 или 15, также включает:
дополнительный MB приемник, регистрирующий MB сигнал, проходящий через промежуточное пространство без отражения;
и систему тревоги для подачи сигнала о вероятном наличии скрытого диэлектрического объекта, располагающегося между первой и второй границами, если
дополнительный приемных зарегистрировал задержку фазы принятого MB сигнала, прошедшего через промежуточное пространство; данная задержка обусловлена наличием в промежуточном пространстве объекта с повышенной диэлектрической постоянной.
Реализация 17: Система из реализации от 14 до 16, в которой скрытые объекты являются взрывчатыми веществами или их компонентами. Подразумевается, что границы изобретения определяются следующей формулой изобретения и ее эквивалентами.
Более того, слова «образец» и «образцовый» здесь используются для обозначения примера, конкретного образца или иллюстрации. Любой аспект или конфигурация, описанная здесь словом «образцовый» не обязательно обозначает предпочтительный или наилучший по сравнению с другими аспектами или конфигурациями. Скорее, использование слов «образец» и «образцовый» служит для представления концепции в определенном аспекте. Также при использовании в данной заявке союз «или» скорее имеет включающую, а не исключающую функцию. Если не сказано иное или это не очевидно из контекста, «X включает А или Б» обозначает обычную включающую комбинацию. А именно, если X включает А; X включает Б; или X включает как А, так и Б, тогда «X включает А или Б», что подтверждается последующими примерами. В дополнение, местоимения «какой-то», «любой» используются в заявке и соответствующей формуле изобретения обычно для обозначения «один и более», если только не указано иное или из контекста не явствует, что речь идет о единственном числе.
Реферат
Использование: для обнаружения потенциально опасных и/или взрывчатых веществ, скрытых под одеждой или в багаже. Сущность изобретения заключается в том, что путем излучения, отражения и регистрации микроволн можно получить трехмерное изображение интересующего объекта. На изображении будет присутствовать контур движущегося человека, а также диэлектрические объекты, скрытые на его теле. Путем измерения фазы и амплитуды микроволн, отраженных от диэлектрического объекта, можно определить длину оптического пути микроволн, прошедших через скрытый объект, что позволит получить трехмерное изображение области скрытого объекта. Одновременно можно использовать несколько излучателей и приемников, также возможно наложение на микроволновое изображение видеоизображения. Технический результат: повышение точности обнаружения потенциально опасных и/или взрывчатых веществ, скрытых под одеждой или в багаже. 2 н. и 15 з.п. ф-лы, 11 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ дистанционного досмотра цели в контролируемой области пространства
Комментарии