Система управления, штанга опрыскивателя, носитель и способ применения - RU2666760C1
Код документа: RU2666760C1
Чертежи
Описание
Изобретение относится к системе управления, предназначенной для оснащения штанги опрыскивателя, установленной на носителе и имеющей регулируемый наклон относительно носителя и земли. Изобретение относится также к штанге опрыскивателя, оснащенной такой системой управления, к носителю, оснащенному такой штангой опрыскивателя, а также к способу применения такой системы управления. Изобретение относится к области штанг сельскохозяйственных опрыскивателей.
Когда сельскохозяйственная машина, оснащенная штангой опрыскивателя, должна работать на неровном участке земли, например, содержащем колеи, как известно, используют установочный домкрат для возврата штанги в положение параллельно земле. Кроме того, как известно, с домкратом объединяют устройство демпфирования для ослабления колебаний штанги, связанных с неровностями земли.
В документе US 2014196996 описан пример системы управления штанги опрыскивателя. Система управления содержит установочный домкрат, имеющий две камеры, разделенные поршнем. Система управления содержит также устройство демпфирования, включающее в себя два накопителя, соответственно связанных с двумя камерами домкрата. Каждый накопитель позволяет компенсировать колебания давления в соответствующей камере.
Настоящее изобретение призвано предложить усовершенствованную систему управления штанги опрыскивателя.
В связи с этим объектом изобретения является система управления, предназначенная для оснащения штанги опрыскивателя, установленной на носителе и имеющей регулируемый наклон относительно носителя, при этом система управления содержит: привод для изменения наклона штанги опрыскивателя; устройство управления приводом; и устройство демпфирования, соединенное с приводом, для ослабления вибраций и колебаний штанги опрыскивателя и, следовательно, для стабилизации наклона. Система управления согласно изобретению содержит также устройство подкачки, работающее одновременно с устройством управления, чтобы компенсировать изменение давления в устройстве демпфирования во время изменения наклона штанги опрыскивателя.
Таким образом, изобретение позволяет корректировать наклон штанги относительно земли, компенсировать неровности земли и подкачивать устройство демпфирования при каждом изменении наклона штанги. На практике это изменение происходит в результате приведения в действие функции коррекции перекоса.
Согласно другим предпочтительным отличительным признакам, рассматриваемым отдельно или к комбинации:
- изменение наклона штанги опрыскивателя происходит в результате ручного приведения в действие функции коррекции перекоса оператором;
- изменение наклона штанги опрыскивателя происходит в результате автоматического приведения в действие функции коррекции перекоса;
- устройство подкачки содержит распределитель, имеющий невозвратное положение и положение циркуляции;
- устройство подкачки содержит также регулируемый ограничитель давления прямого действия и обратный клапан, расположенные параллельно относительно друг друга и последовательно относительно распределителя;
- устройство подкачки расположено на выходе устройства демпфирования относительно привода;
- привод является двухступенчатым домкратом со сквозным штоком, содержащим полый корпус, поршень, выполненный с возможностью перемещения в полом корпусе, шток, неподвижно соединенный с поршнем и выходящим с каждой стороны корпуса, и две камеры, разделенные поршнем в корпусе.
- привод состоит из двух одноступенчатых домкратов, установленных противоположно друг другу и имеющих одинаковое сечение;
- устройство демпфирования содержит два накопителя, каждый из который выполнен с возможностью подзарядки от устройства подкачки в случае разрежения относительно другого накопителя;
- устройство демпфирования содержит два распределителя, работающих по принципу «все или ничего», для активации или деактивации демпфирования;
- устройство демпфирования содержит два пропорциональных распределителя для регулирования жесткости демпфирования.
Объектом изобретения является также штанга опрыскивателя, выполненная с возможностью установки на носителе и имеющая регулируемый наклон, согласно изобретению, штанга опрыскивателя оснащена вышеупомянутой системой управления.
Объектом изобретения является также носитель, например, сельскохозяйственная машина или прицеп, оснащенный вышеупомянутой штангой опрыскивателя. Носитель может быть самоходным, навесным или буксируемым.
Объектом изобретения является также способ применения вышеупомянутой системы управления. Способ содержит этап коррекции перекоса, на котором изменяют наклон штанги опрыскивателя, при этом устройство управления управляет приводом, тогда как устройство подкачки компенсирует изменение давления в устройстве демпфирования. На этом этапе, который является результатом приведения в действие функции коррекции перекоса, подкачка происходит автоматически и одновременно с управлением.
Изобретение будет более понятно из нижеследующего описания, представленного в качестве неограничивающего примера со ссылками на прилагаемые чертежи.
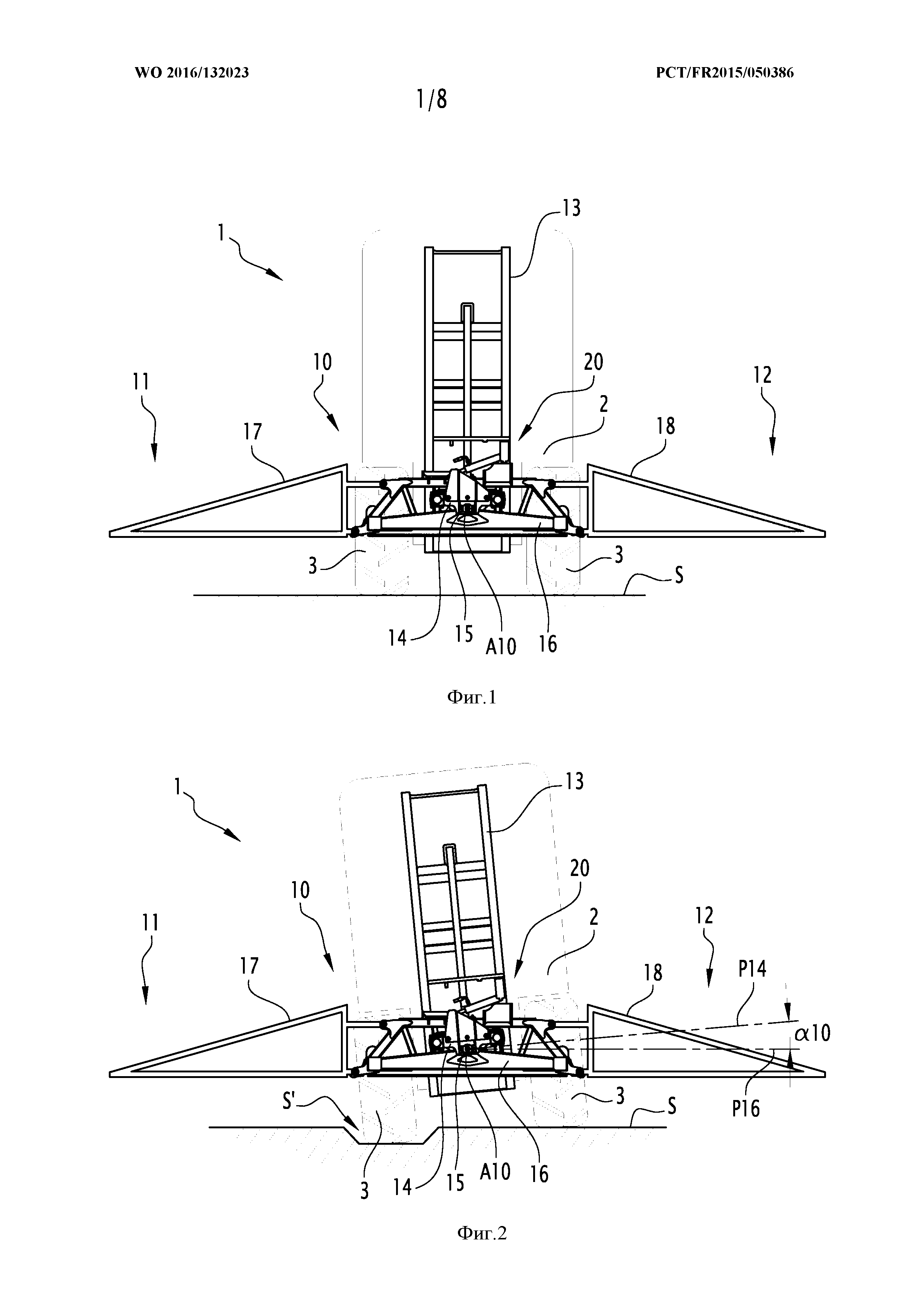
На фиг. 1 показан носитель в соответствии с изобретением типа сельскохозяйственной машины, оснащенной штангой опрыскивателя и системой управления в соответствии с изобретением, вид сзади;
на фиг. 2 показан вид, аналогичный виду на фиг. 1, при этом штанга опрыскивателя, наклонена относительно машины и земли, а одно колесо машины находится в колее;
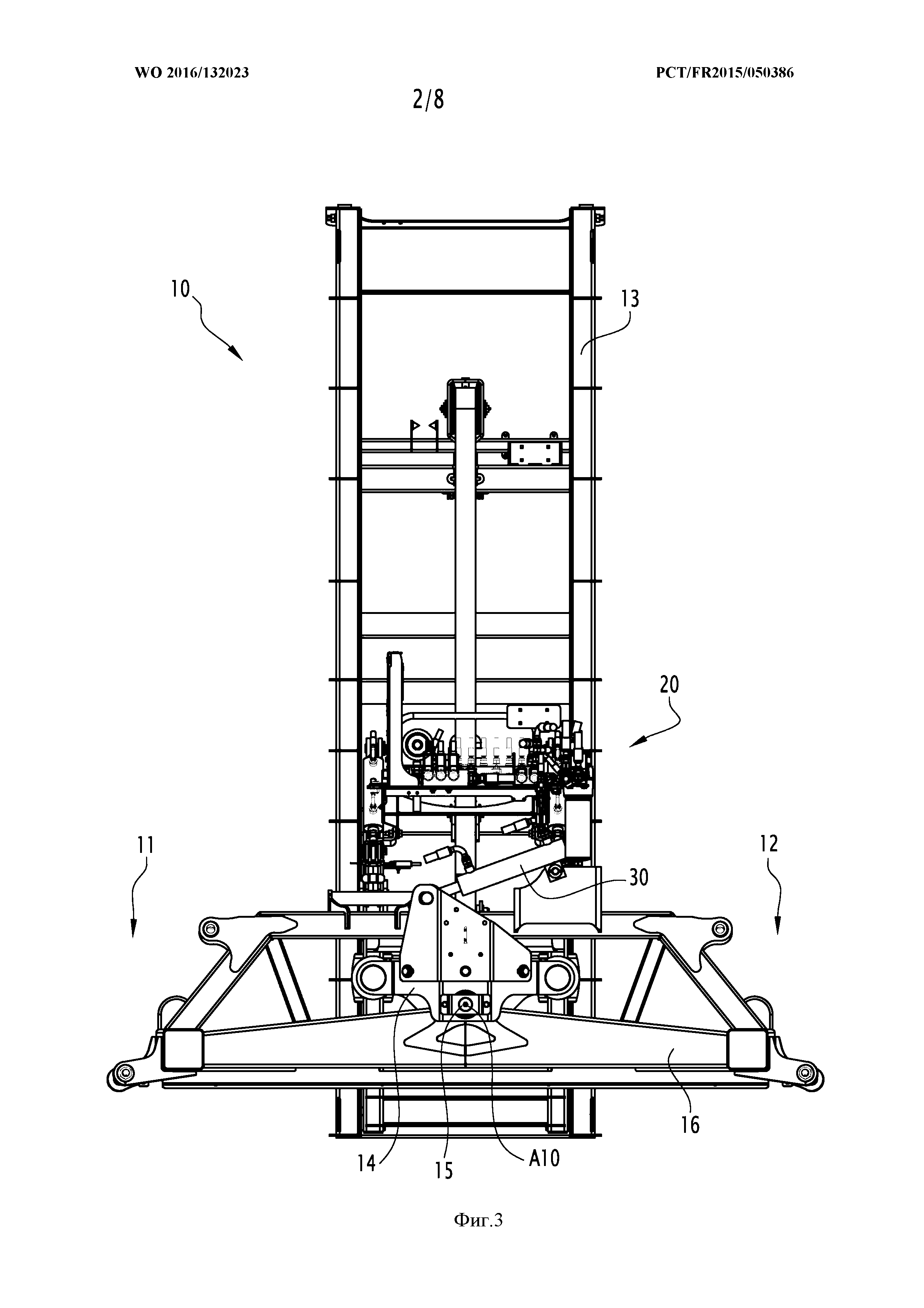
на фиг. 3 показана часть штанги опрыскивателя, изображенная на фиг. 1 и 2, увеличенный вид сзади;
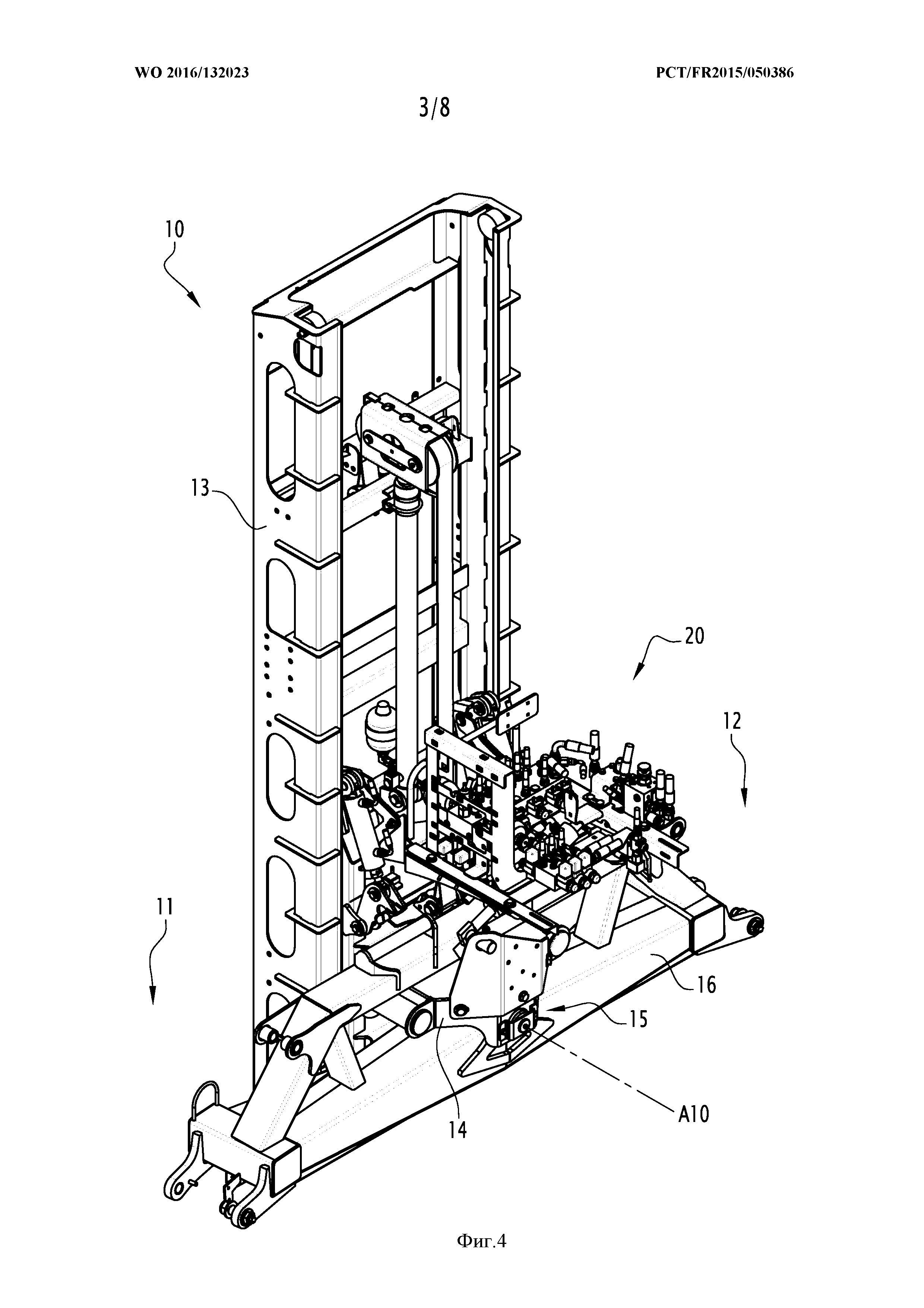
на фиг. 4 показана часть штанги опрыскивателя, изображенной на фиг. 1 и 2 увеличенный вид в перспективе;
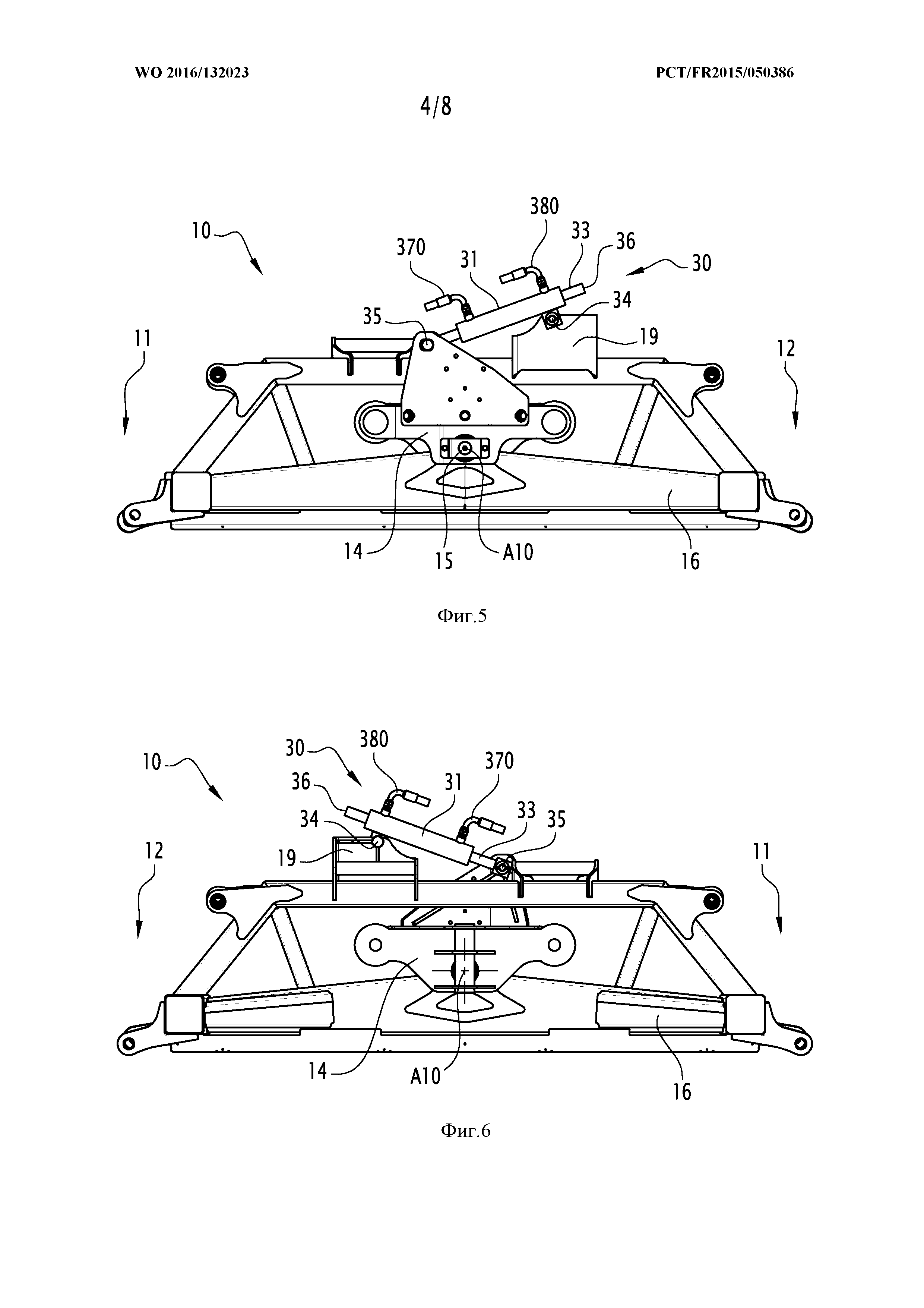
на фиг. 5 показаны штанга и система управления, частичный увеличенный вид сзади, аналогичный фиг. 3;
на фиг. 6 показан вид спереди, аналогичный фиг. 5;
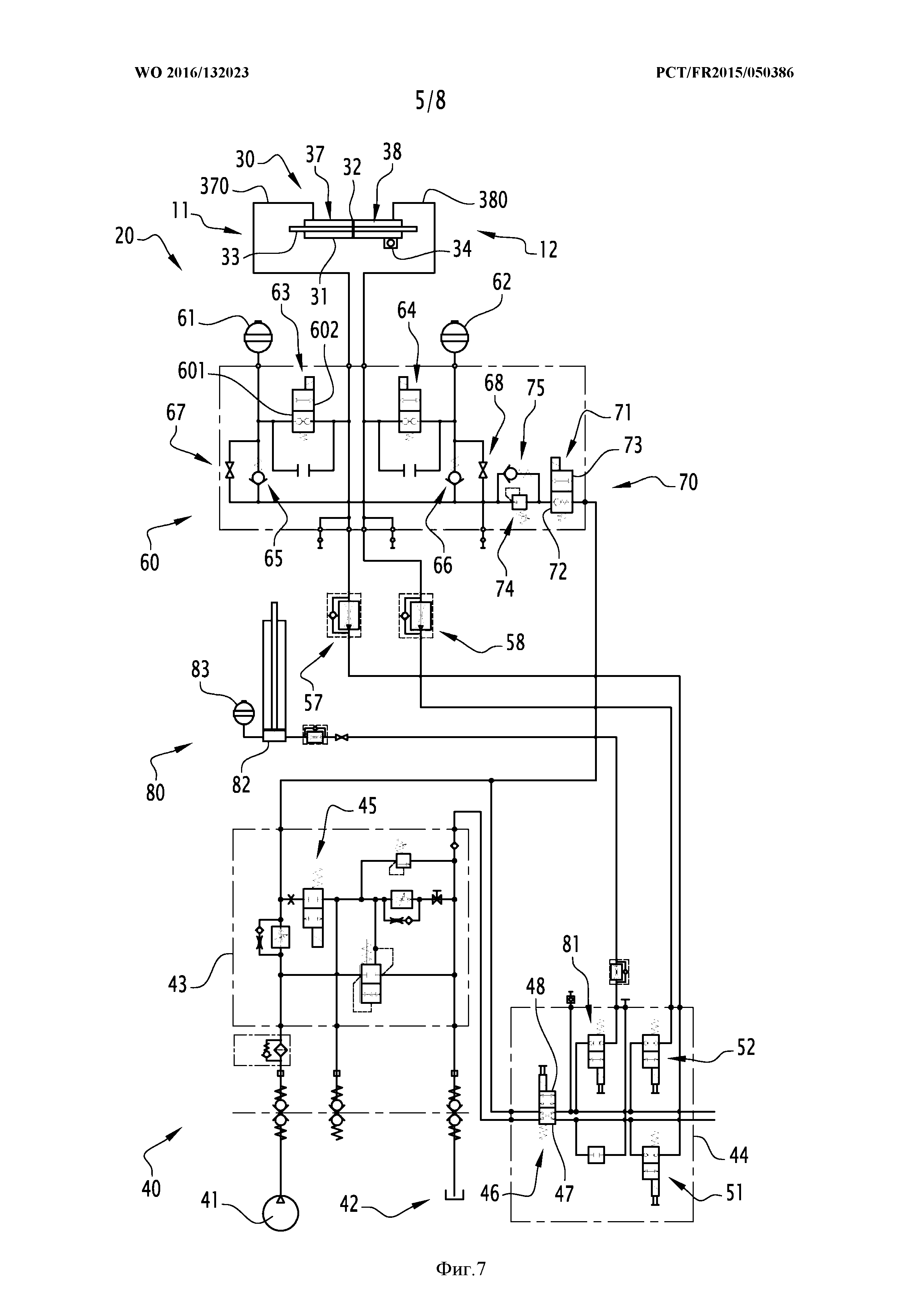
на фиг. 7 представлена гидравлическая схема системы управления, показанной на фиг. 1 и 6;
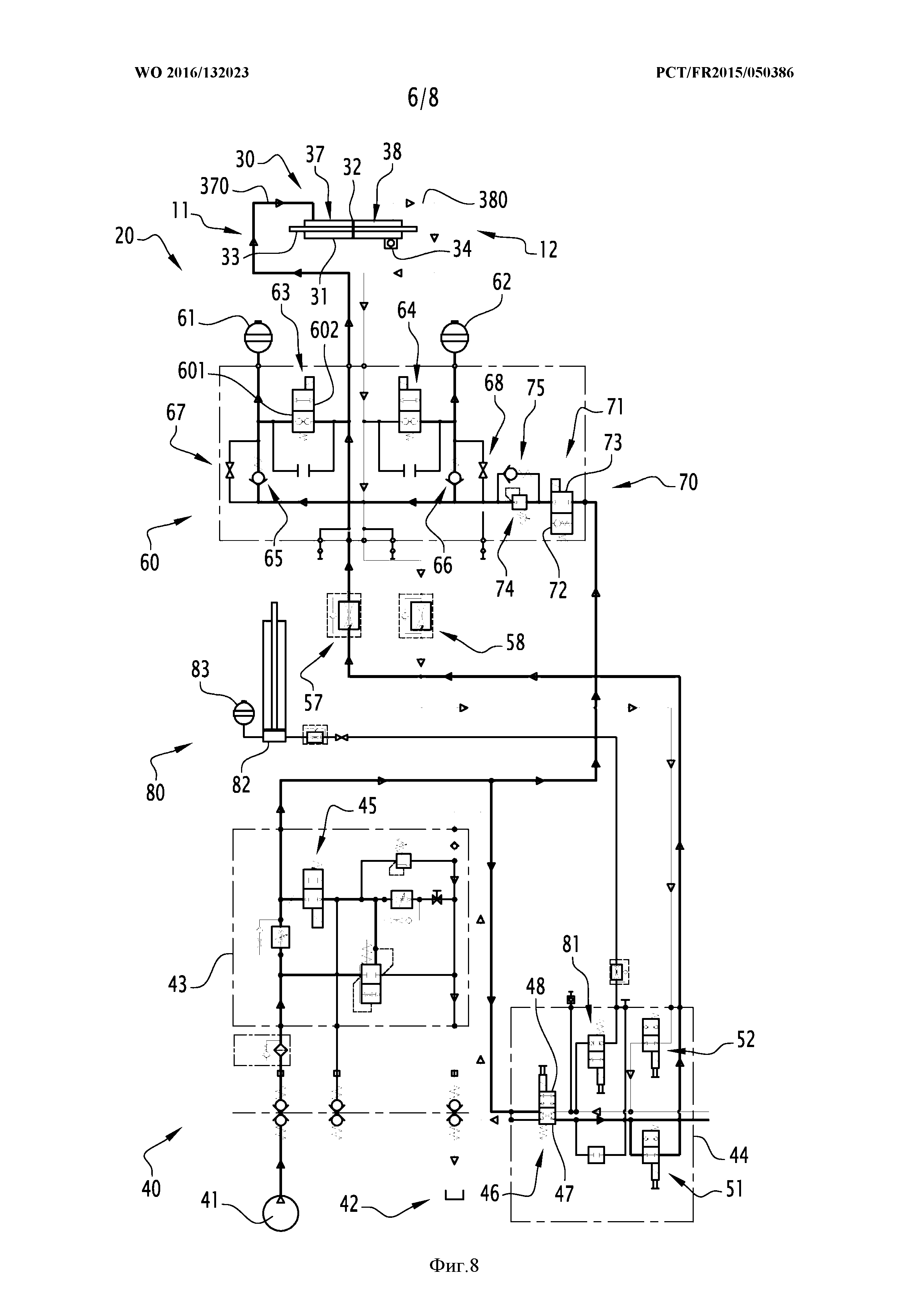
на фиг. 8 представлена схема, аналогичная фиг. 7, во время наклона штанги опрыскивателя на первой стороне;
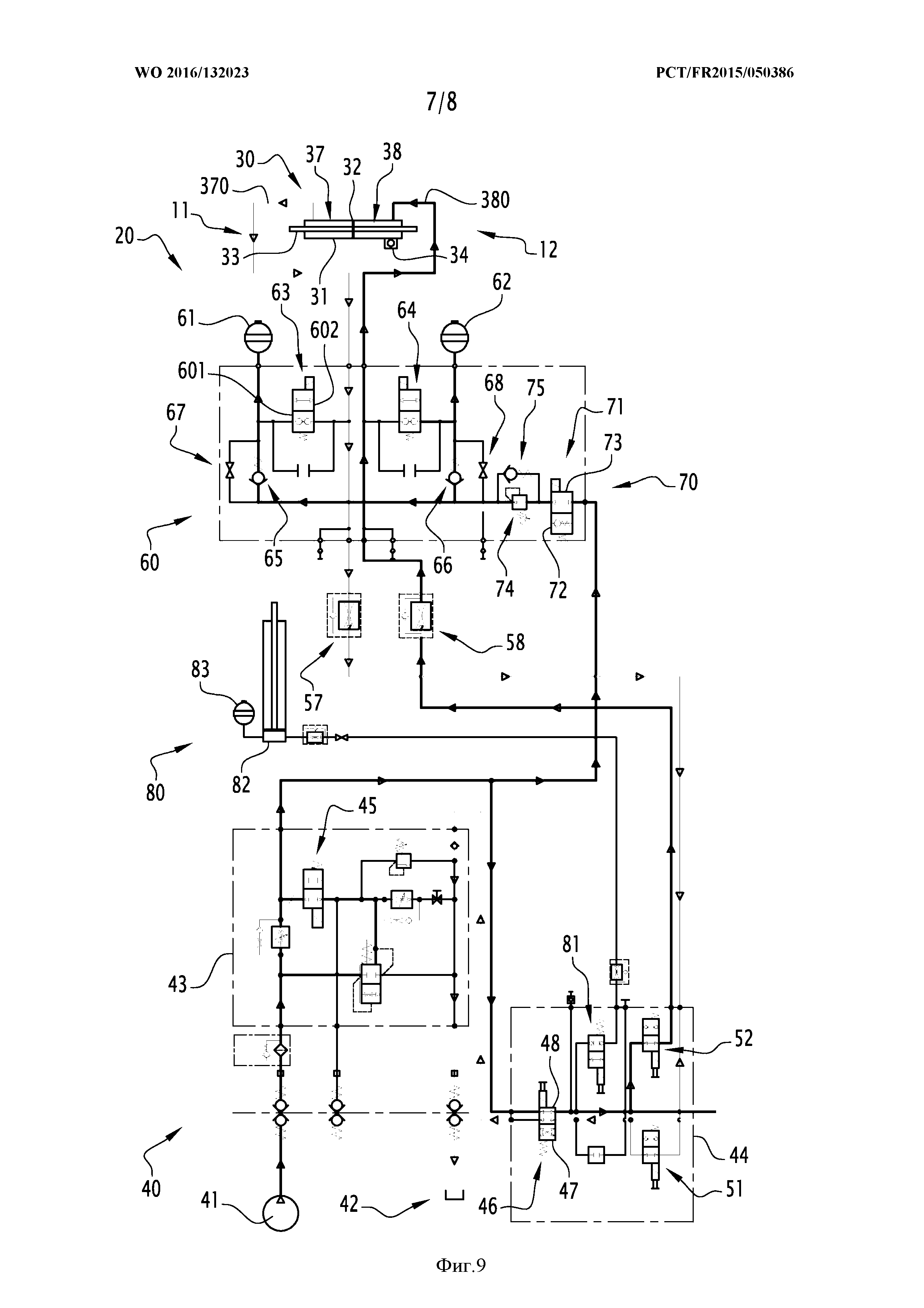
на фиг. 9 представлена схема, аналогичная фиг. 7, во время наклона штанги опрыскивателя на второй стороне;
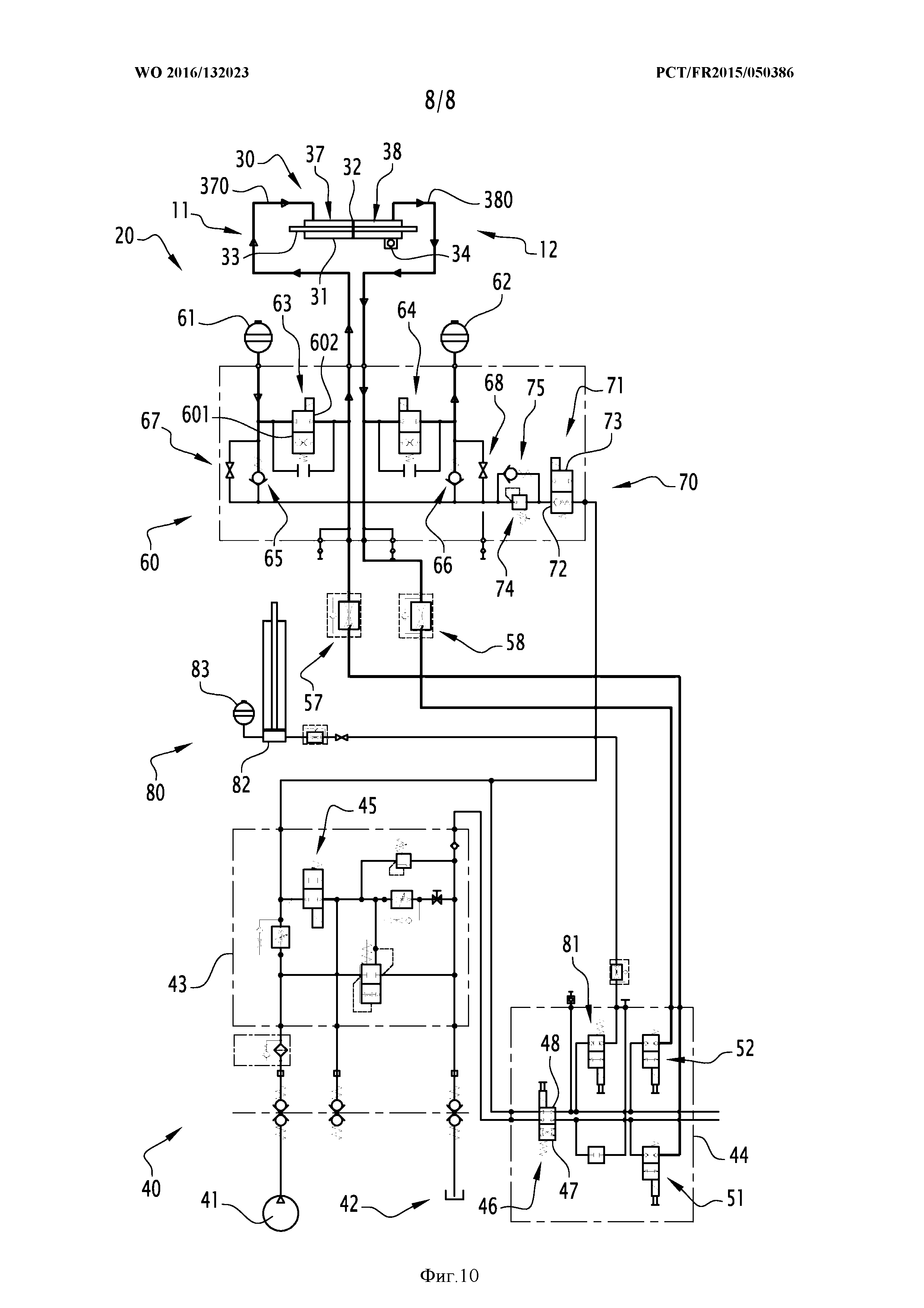
на фиг. 10 представлена схема, аналогичная фиг. 7, во время демпфирования вибраций, действующих на штангу.
На фиг. 1 и 2 показан носитель в соответствии с изобретением типа сельскохозяйственной машины 1. В варианте носитель может быть носителем любого типа, адаптированный для рассматриваемого применения. Машина 1 содержит шасси 2 и колеса 3, вращающиеся относительно шасси 2. Колеса 3 показаны в положении опоры на землю S, которая является ровной на фиг. 1 и содержит колею S’ на фиг. 2.
Машина 1 оборудована штангой 10 опрыскивателя в соответствии с изобретением. Для упрощения штанга 10 опрыскивателя и ее составные элементы показаны на фиг. 1-6 частично.
Штанга 10 расположена в горизонтальном направлении между левой стороной 11 и правой стороной 12. Ориентацию сторон 11 и 12 определяют относительно направления движения машины 1. Штанга 10 содержит неподвижный кронштейн 13, подвижную каретку 14, шарнир 15, наклоняемую часть 16 и два плеча 17 и 18 опрыскивателя. Кронштейн 13 закреплен на шасси 2 машины 1. Каретка 14 установлена при помощи кулисного соединения на кронштейне 13. Каретка 14 является подвижной в вертикальном направлении относительно кронштейна 13 для опускания или подъема плеч 17 и 18. Наклоняемая часть 16 является подвижной с возможностью поворота относительно каретки 14 на уровне шарнира 15, который образует поворотную ось А10, параллельную продольному направлению машины 1. Плечи 17 и 18 расположены с двух сторон от наклоняемой части 16 соответственно на сторонах 11 и 12 штанги 10. Плечи 17 и 18 оснащены устройством опрыскивания, которое не является объектом настоящего изобретения. Размах штанги 10, измеренный между концами плеч 17 и 18 на сторонах 11 и 12, составляет, например, примерно от 12 до 54 метров.
В примере, представленном на фигурах, штанга 10 расположена горизонтально, при этом ее плечи 17 и 18 расположены параллельно земле. Плечи 17 и 18 могут также быть расположены вертикально или могут быть наклонены в соответствии с любой возможной ориентацией.
Штанга 10 имеет регулируемый наклон α10 относительно машины 1. Наклон α10 показан в виде угла, образованного вокруг поворотной оси А10 между горизонтальной опорной плоскостью Р14, связанной с кареткой 14, и наклоняемой плоскостью Р16, связанной с наклоняемой частью 16 и с плечами 17 и 18, как показано на фиг. 2. В примере на фиг. 2 плечо 17 поднято с левой стороны 11, тогда как плечо 18 опушено с правой стороны 12, чтобы плечи 17 и 18 располагались параллельно земле S.
Штанга 10 оснащена гидравлической системой 20 управления, выполненной, в частности, с возможностью регулирования наклона α10. Предпочтительно в рамках изобретения изменение наклона α10 происходит в результате ручного приведения в действие оператором функции коррекции перекоса при помощи не показанного блока управления.
Система 20 содержит установочный домкрат 30, устройство 40 управления, устройство 60 демпфирования и устройство 70 подкачки. Домкрат 30 позволяет изменять наклон α10 штанги 10, иначе говоря, корректировать угол между плоскостями Р14 и Р16 посредством механического действия штока 33 на наклоняемую часть 16. Устройство 40 позволяет управлять домкратом 30, чтобы наклонять штангу 10. Устройство 60 демпфирования позволяет ослаблять вибрации и колебания рампы 10, когда машина 1 движется по неровной земле S, и стабилизировать, таким образом, наклон α10. Устройство 70 подкачки, активируемое одновременно с устройством 40 управления, позволяет компенсировать изменение давления в устройстве 60 демпфирования во время регулирования наклона α10 штанги 10.
Система 20 обеспечивает также другие функции, непосредственно не связанные с объектом настоящего изобретения, которые будут упомянуты ниже. Для этого система 20 содержит другие устройства, из которых для упрощения показано только устройство 80. Этим устройством 80 и другими устройствами может управлять устройство 40 управления. Устройство 80 содержит распределитель 81, работающий по принципу «все или ничего», домкрат 82 и накопитель 83. Устройство 80 позволяет перемещать каретку 14 относительно кронштейна 13 за счет действия домкрата 82. Другие не показанные устройства позволяют, в частности, раскладывать, складывать или блокировать в положении составные части плеч 17 и 18.
В неограничивающем примере, показанном на фиг. 1-10, домкрат 30 является двухступенчатым домкратом со сквозным штоком 33, называемым также двойным штоком. Домкрат 30 содержит корпус 31, поршень 32, установленный подвижно с возможностью поступательного движения в корпусе 31, а также шток 33, неподвижно соединенный с поршнем 32. Шток 33 выступает с двух сторон из поршня 32, проходит через корпус 31 и выходит на концах корпуса 31. Корпус 31 содержит выступ 34, шарнирно соединенный с площадкой 19, неподвижно соединенной с наклоняемой частью 16. Шток 33 имеет один конец 35, шарнирно соединенный с кареткой 14, и свободный конец 36. В корпусе 31 с двух сторон от поршня 32 ограничены две камеры 37 и 38. В камеры 37 и 38 может поступать текучая среда под давлением через патрубки, соответственно 370 и 380, установленные на корпусе 31. Давление в домкрате 30 зависит от размаха штанги 10.
В случае превышения давления в левой камере 37 по отношению к правой камере 38 поршень 32 и шток 33 выталкиваются с правой стороны 12. Конец 35 штока 33 перемещает подвижную часть 16 и меняет наклон α10 таким образом, чтобы поднять левое плечо 17, тогда как правое плечо 18 опускается.
В случае превышения давления в правой камере 38 по отношению к левой камере 37 поршень 32 и шток 33 выталкиваются с левой стороны 11. Конец 35 штока 33 перемещает подвижную часть 16 и меняет наклон α10 таким образом, чтобы опустить левое плечо 17, тогда как правое плечо 18 поднимается.
Устройство 40 управления генерирует гидравлическую энергию, обеспечивающую работу системы 20, в частности, домкрата 30. Устройство 40 содержит насос 41, резервуар 42, входной блок 43 и функциональный блок 44. Резервуар 42 образует источник текучей среды внутри системы 20. Входной блок 43 включает в себя распределитель 45, работающий по принципу «все или ничего», выполненный с возможностью обеспечения или перекрывания циркуляции текучей среды между насосом 41, резервуаром 42 и функциональным блоком 44. Функциональный блок 44 включает в себя различные распределители, соответствующие функциям системы 20, в том числе реверсирующий распределитель 46, два распределителя 51 и 52 «все или ничего», распределитель 81, соединенный с домкратом 82, а также другие распределители, связанные с не показанными устройствами, которыми оснащена система 20.
Устройство 40 содержит также два однонаправленных ограничителя расхода 57 и 58, установленные между функциональным блоком 44 и домкратом 30. В частности, ограничитель 57 установлен между распределителем 51 и патрубком 370, тогда как ограничитель 58 установлен между распределителем 52 и патрубком 380.
Устройство 60 демпфирования содержит два накопителя 61 и 62, два распределителя «все или ничего» 63 и 64, два обратных клапана 65 и 66, а также два двухходовых вентиля 67 и 68. Элементы 61, 63, 65 и 67 расположены с левой стороны 11 между ограничителем 57, патрубком 370 и системой 70. Элементы 62, 64, 66 и 68 расположены с правой стороны 12 между ограничителем 58, патрубком 380 и системой 70. Каждый накопитель 61 и 62 сообщается с одной из камер, соответственно 37 или 38, домкрата 30. Каждый накопитель 61 и 62 выполнен в виде азотной сферы, образуя гидравлический амортизатор.
В примере, представленном на фигурах, каждый распределитель 63 и 64, работающий по принципу «все или ничего», имеет положение 601 закрытого распределителя и положение 602 открытого распределителя. Демпфирование может быть активировано или нет в зависимости от положения 601 или 602 распределителей 63 и 64. Демпфирование является неактивным в положении 601 и активным с не изменяемой оператором жесткостью в положении 602.
Согласно не показанному варианту, распределители 63 и 64 могут быть пропорциональными распределителями. Расход циркуляции текучей среды между каждым из накопителей 61 и 62 и соответствующей камерой 37 или 38 домкрата 30 можно изменять за счет действия двух пропорциональных распределителей, что позволяет изменять жесткость демпфирования. Так, оператор штанги 10 может произвольно регулировать жесткость демпфирования, например, в зависимости от характера участка земли, при помощи ручного привода. Согласно не показанным вариантам, этот привод можно приводить в действие по-разному, и он может находиться в разных местах машины. На практике оператор одновременно изменяет положение каждого из распределителей 63 и 64, пока не добьется желаемой жесткости демпфирования.
Устройство 70 подкачки содержит распределитель 71, имеющий невозвратное положение 72 и положение 73 циркуляции. Устройство 70 содержит также регулируемый ограничитель 74 давления прямого действия и обратный клапан 75, расположенные параллельно относительно друг друга и последовательно относительно распределителя 71. Устройство 70 расположено на выходе устройства 60 относительно привода 30. Если давление одного из накопителей 61 или 62 отличается от давления другого накопителя, устройство 70 позволяет подкачать этот накопитель 61 или 62, чтобы во время этапа демпфирования давление в обоих накопителях 61 и 62 было одинаковым.
Далее со ссылками на фиг. 7-10 следует описание работы системы 20 управления.
На фиг. 7 система 20 показана в состоянии покоя. Распределители 45, 51 и 52 находятся в отключенном положении. Распределитель 71 находится в невозвратном положении 72. Внутри системы 20 текучая среда не циркулирует.
На фиг. 8 и 9 система 20 показана во время этапа коррекции перекоса, то есть во время этапа изменения наклона α10 штанги 10. Распределители 45, 51 и 52 находятся в положении циркуляции. Распределитель 71 тоже находится в положении циркуляции, что позволяет устройству 70 подкачки обеспечивать свою функцию. На практике этап коррекции перекоса оператор запускает вручную из кабины. Согласно первому варианту, оператор может постепенно изменять наклон α10, пока не получит желаемое значение наклона α10. Согласно второму варианту, регулирование значения наклона α10 происходит автоматически при помощи предусмотренного для этого дополнительного устройства, которое не является объектом настоящего изобретения.
Во время этого этапа коррекции перекоса, если в одном из накопителей 61 или 62 давление отличается от давления в другом накопителе, этот накопитель 61 или 62 подкачивают при помощи устройства 70 подкачки, чтобы добиться баланса давления в обоих накопителях 61 и 62 в конце приведения в действие функции коррекции перекоса. Без этой подкачки появляется дисбаланс давления между двумя накопителями 61 и 62, связанными соответственно с камерами 37 и 38 домкрата 30. В этом случае демпфирование не будет удовлетворительным и в некоторых случаях может привести к неконтролируемому движению домкрата 30 и, следовательно, плеч 17 и 18.
На фиг. 8 распределитель 46 находится в положении циркуляции 47. Насос 41 качает текучую среду в направлении устройства 70 подкачки, затем устройства 60 демпфирования, а также в направлении камеры 37 домкрата 30, при этом текучая среда проходит через распределитель 46, распределитель 51, ограничитель 57 и патрубок 370. Камера 37 имеет избыток давления по сравнению с камерой 38, поэтому шток 33 перемещается в правую сторону 12. Текучая среда, содержащаяся в камере 38, выходит через патрубок 380, затем проходит через ограничитель 58, распределитель 52, распределитель 46 и поступает в резервуар 42. Наклон α10 штанги 10 меняется, при этом левое плечо 17 поднимается, а правое плечо 18 опускается.
На фиг. 9 распределитель 46 находится в положении циркуляции 48. Насос 41 качает текучую среду в направлении устройства 70 подкачки, затем устройства 60 демпфирования и, а также в направлении камеры 38 домкрата 30, при этом текучая среда проходит через распределитель 46, распределитель 52, ограничитель 58 и патрубок 380. Камера 38 имеет избыток давления по сравнению с камерой 37, поэтому шток 33 перемещается в левую сторону 11. Текучая среда, содержащаяся в камере 37, выходит через патрубок 370, затем проходит через ограничитель 57, распределитель 51, распределитель 46 и поступает в резервуар 42. Наклон α10 штанги 10 меняется, при этом левое плечо 17 опускается, а правое плечо 18 поднимается.
На фиг. 10 система 20 показана на этапе демпфирования, когда штанга 10 работает и имеет данный наклон α10. При этом распределители 51 и 52 находятся в отключенном положении. Распределитель 71 находится в невозвратном положении 72, которое тоже соответствует отключенному положению. Распределители 63 и 64 находятся в положении циркуляции 602.
Оператор запускает этап коррекции перекоса вручную, тогда как запуск этапа демпфирования происходит автоматически без вмешательства оператора в зависимости от вибраций и колебаний, которым подвергается штанга 10. На практике демпфирование позволяет поддерживать наклон α10 в интервале, амплитуда которого зависит от размаха штанги 10. Например, но не ограничительно этот интервал может составлять ±5° относительно значения, определенного во время этапа коррекции перекоса.
В упрощенном примере, показанном на фиг. 10, на штангу 10 действуют механические напряжения, стремящиеся переместить шток 33 в правую сторону 12. Камера 37 оказывается в состоянии разрежения по сравнению с камерой 38. Соответственно текучая среда проходит из накопителя 61 в камеру 37, тогда как текучая среда из камеры 38 проходит в накопитель 62, осуществляя демпфирование движения плеча 17 и 18.
Во время последующего этапа коррекции перекоса подкачка позволяет добиться баланса давления внутри устройства 60 демпфирования. Без этой подкачки между двумя накопителями 61 и 62 будет сохраняться дисбаланс после этапа демпфирования, поэтому последующее демпфирование не будет удовлетворительным и в некоторых случаях может привести к неконтролируемому движению домкрата 30 и, следовательно, плеч 17 и 18.
Кроме того, не выходя за рамки изобретения, машину 1, штангу 10 опрыскивателя и систему 20 управления можно выполнить по-другому, не так, как показано на фиг. 1-10.
В непоказанном варианте привод 30 может быть отличным от двухступенчатого домкрата со сквозным штоком. Например, привод 30 может состоять из двух одноступенчатых домкратов с одинаковым сечением, расположенных противоположно друг другу.
Согласно еще одному не показанному варианту, устройство 40 управления может быть выполнено иначе, чем на фигурах.
Кроме того, технические признаки различных вышеупомянутых вариантов и версий осуществления можно полностью или частично комбинировать. Так, систему 20 управления можно адаптировать с точки зрения стоимости, функциональных возможностей и эффективности.
Реферат
Группа изобретений относится к системе управления, предназначенной для оснащения штанги опрыскивателя, установленной на носителе и имеющей регулируемый наклон относительно носителя и земли. Система содержит привод для изменения наклона штанги опрыскивателя. Система включает устройство управления приводом и устройство демпфирования, соединенное с приводом, для ослабления вибраций и колебаний штанги опрыскивателя для стабилизации наклона. Система содержит устройство подкачки, работающее одновременно с устройством управления, для компенсации изменения давления в устройстве демпфирования во время изменения наклона штанги опрыскивателя. Штанга опрыскивателя выполнена с возможностью установки на носителе и имеет регулируемый наклон. Штанга опрыскивателя оснащена системой управления. Носитель оснащен штангой опрыскивателя. Осуществляют коррекцию перекоса, при которой изменяют наклон штанги опрыскивателя. Устройство управления управляет приводом, в то время как устройство подкачки компенсирует изменение давления в устройстве демпфирования. Обеспечивается корректировка наклона штанги относительно земли и с учетом неровностей земли. 4 н. и 10 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Стабилизирующая и раскрепляющая система, а также удерживающая и позиционирующая система для удержания и позиционирования стрелы сельскохозяйственной машины
Комментарии