Энкодер, использующий признак опускания магнита для обнаружения кражи - RU2526590C2
Код документа: RU2526590C2
Чертежи



Описание
РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Эта заявка испрашивает приоритет предварительной заявки на патент с порядковым номером 61/289,756, озаглавленной "Encoder Using Magnet Drop Out Feature for Theft Detection" (Энкодер, использующий признак опускания магнита для обнаружения кражи), поданной 23 декабря 2009 года, предварительной заявки на патент с порядковым номером 61/291,506, озаглавленной "Encoder Using Magnet Drop Out Feature for Theft Detection" (Энкодер, использующий признак опускания магнита для обнаружения кражи), поданной 31 декабря 2009 года, и заявки на патент США с порядковым номером 12/952,496, озаглавленной "Encoder Using Magnet Drop Out Feature for Theft Detection" (Энкодер, использующий признак опускания магнита для обнаружения кражи), поданной 23 ноября 2010 года, объект патентования которых включен посредством ссылки полностью.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0002] В целом настоящее изобретение относится системам распределения текучей среды, а более точно к энкодерам для измерения выходного потока систем распределения текучей среды.
УРОВЕНЬ ТЕХНИКИ, К КОТОРОМУ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0003] Системы распределения текучей среды для измерения количества распределенной текучей среды зачастую эксплуатируются с энкодерами. Эти энкодеры обычно сопрягаются с измерительными устройствами для текучей среды, например с валом поршневого расходомера, и используются для вычисления количества распределенной текучей среды за счет измерения количества циклов или вращений поршневого расходомера. Традиционные энкодеры могут быть механически деактивированы, что препятствует системе распределения текучей среды точно измерять количество распределенной текучей среды. Например, вор может механически отсоединить энкодер от поршневого расходомера в системе распределения топлива, при этом оставить энкодер электрически соединенным с системой. Подобное изменение позволит осуществить непрерывную выдачу топлива. Однако при разъединении компоновки энкодера-поршня система не будет точно обнаруживать объем распределенного топлива, следовательно, осуществлять соответствующий расчет задолженности.
[0004] Магнитные энкодеры типично функционируют за счет механического закрепления магнита на вале вращения и за счет взаимосвязанного размещения относительно вала с магнитом датчика для измерения изменения магнитного поля (например, изменения направления магнитного поля), вызванного осуществлением вращения. Некоторые способы вмешательства, предназначенные для вывода из строя такой компоновки, включают в себя (помимо удаления энкодера, рассматриваемого выше) введение сильного магнитного поля в окрестности такой компоновки. В частности, за счет введения магнитного поля с высокой магнитной индукцией, например за счет активизации электромагнита около системы распределения топлива, возможно помешать магнитному датчику энкодера точно измерить изменение направления магнитного поля, вызванного вращающимся магнитом, и, таким образом, возможно избежать оплаты справедливой стоимости распределенного топлива.
[0005] Конструкции систем распределения топлива, которые не допускают вандализма, вмешательства или кражи, могут быть ограничены рабочей средой системы. В частности, энкодеры обычно размещаются в корпусе системы распределения топлива. Эти системы конструируются так, чтобы осуществлять их наиболее интенсивную вентиляцию для обеспечения эффективного испарения рассеянного или пролитого топлива. Однако подобная вентиляция допускает постоянное присутствие испарений топлива в окрестности энкодеров, ограничивая применение целесообразных конструктивных решений. Например, в конструкциях может быть недопустимо применение переключателей из-за риска электрической дуги, которая может вызвать возгорание испарений топлива. Аналогично, в конструкциях может быть недопустимо использование механических взаимодействий из-за риска искр, вызванных трением, что воспламеняет испарения топлива.
[0006] Существует потребность в альтернативных устойчивых к вмешательству энкодерах, приспособленных для работы в средах с высокой пожароопасностью.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] В варианте осуществления настоящего изобретения предоставлен энкодер для системы распределения текучей среды. Энкодер содержит магнитный датчик, выполненный с возможностью формирования первого выходного сигнала, указывающего измеренное магнитное поле. Контроллер реагирует на первый выходной сигнал и выполнен, чтобы сравнивать первый выходной сигнал с заданным пороговым значением. Контроллер дополнительно выполнен, чтобы формировать второй выходной сигнал, если первый выходной сигнал больше или меньше порогового значения. Пороговое значение может указывать на расстояние между магнитом, с возможностью вращения соединенным с выходным валом дозатора текучей среды, и магнитным датчиком. Магнит может быть размещен таким образом, чтобы быть подвижным между первым местоположением, в котором энкодер установлен на дозатор текучей среды, и вторым местоположением, в котором энкодер снимается с дозатора текучей среды.
[0008] Другой вариант осуществления настоящего изобретения включает в себя способ управления энкодером для системы распределения текучей среды. Способ включает в себя этапы измерения параметра магнитного поля, сформированного системой распределения текучей среды. Этот параметр магнитного поля сравнивается с заданным пороговым значением. Выходной сигнал, действующий для деактивации распределительной системы, формируется при условии, что измеренный параметр магнитного поля больше или меньше заданного порогового значения.
[0009] В другом варианте осуществления энкодер, устанавливаемый на вал, продолжающийся из поршневого расходомера, выполненный с возможностью вычисления объема распределенной текучей среды, включает в себя магнит, закрепленный на вале посредством плавающего магнитного держателя, и магнитный датчик, выполненный с возможностью измерения магнитной индукции и направления магнитного поля, созданного магнитом, и вывода сигнала, указывающего магнитную индукцию и направление магнитного поля к печатной плате. Печатная плата выполнена с возможностью сравнения выведенного сигнала от магнитного датчика с пороговым значением и вывода сигнала, указывающего объем распределенной текучей среды, если сравнение, образующее разницу между выходным сигналом и пороговым значением, находится в заданном приемлемом диапазоне, указывая, что в энкодер не было осуществлено вмешательство, и выполнена с возможностью вывода сигнала ошибки, если сравнение образует разницу между выходным сигналом и пороговым значением, которая не находится в заданном приемлемом диапазоне, указывая, что в энкодер было осуществлено вмешательство.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
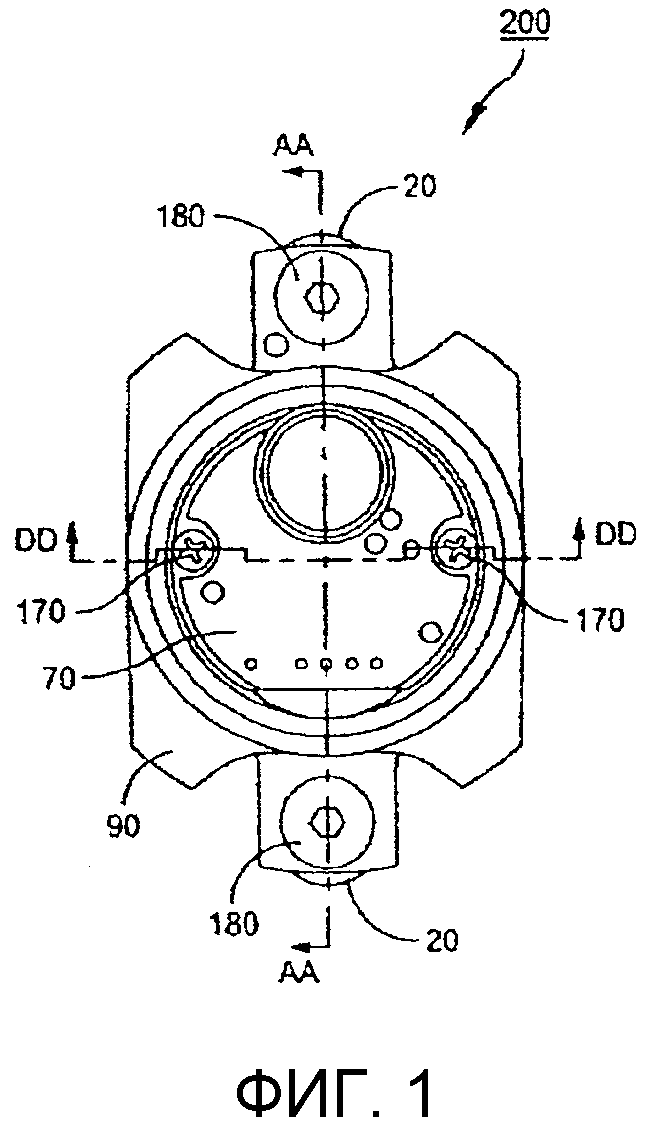
[0010] Фиг.1 - вид в перспективе сверху энкодера согласно примерному варианту осуществления настоящего изобретения.
[0011] Фиг.2 - вид в перспективе снизу энкодера Фиг.1.
[0012] Фиг.3 - сечение энкодера Фиг.1, взятого вдоль линии АА.
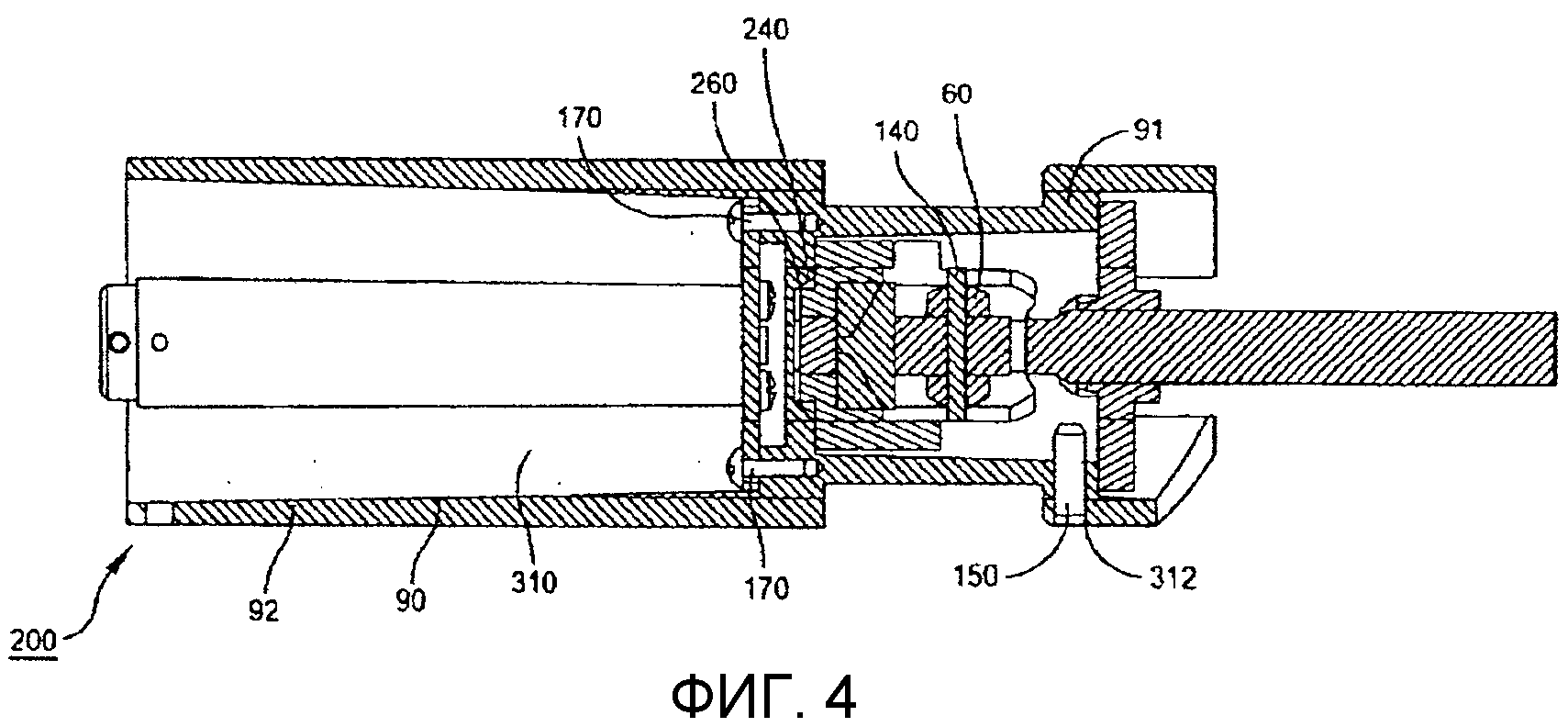
[0013] Фиг.4 - сечение энкодера Фиг.1, взятого вдоль линии DD.
[0014] Фиг.5 - более подробное сечение СС Фиг.3.
[0015] Фиг.6а - вид в перспективе сверху держателя магнита Фиг.3.
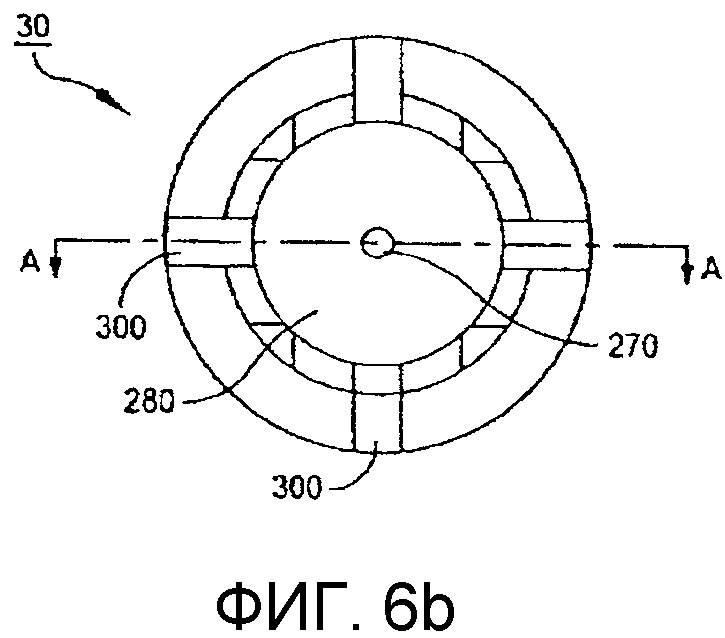
[0016] Фиг.6b - вид в перспективе снизу держателя магнита Фиг.3.
[0017] Фиг.6с - сечение держателя магнита Фиг.3, взятого вдоль линии А.
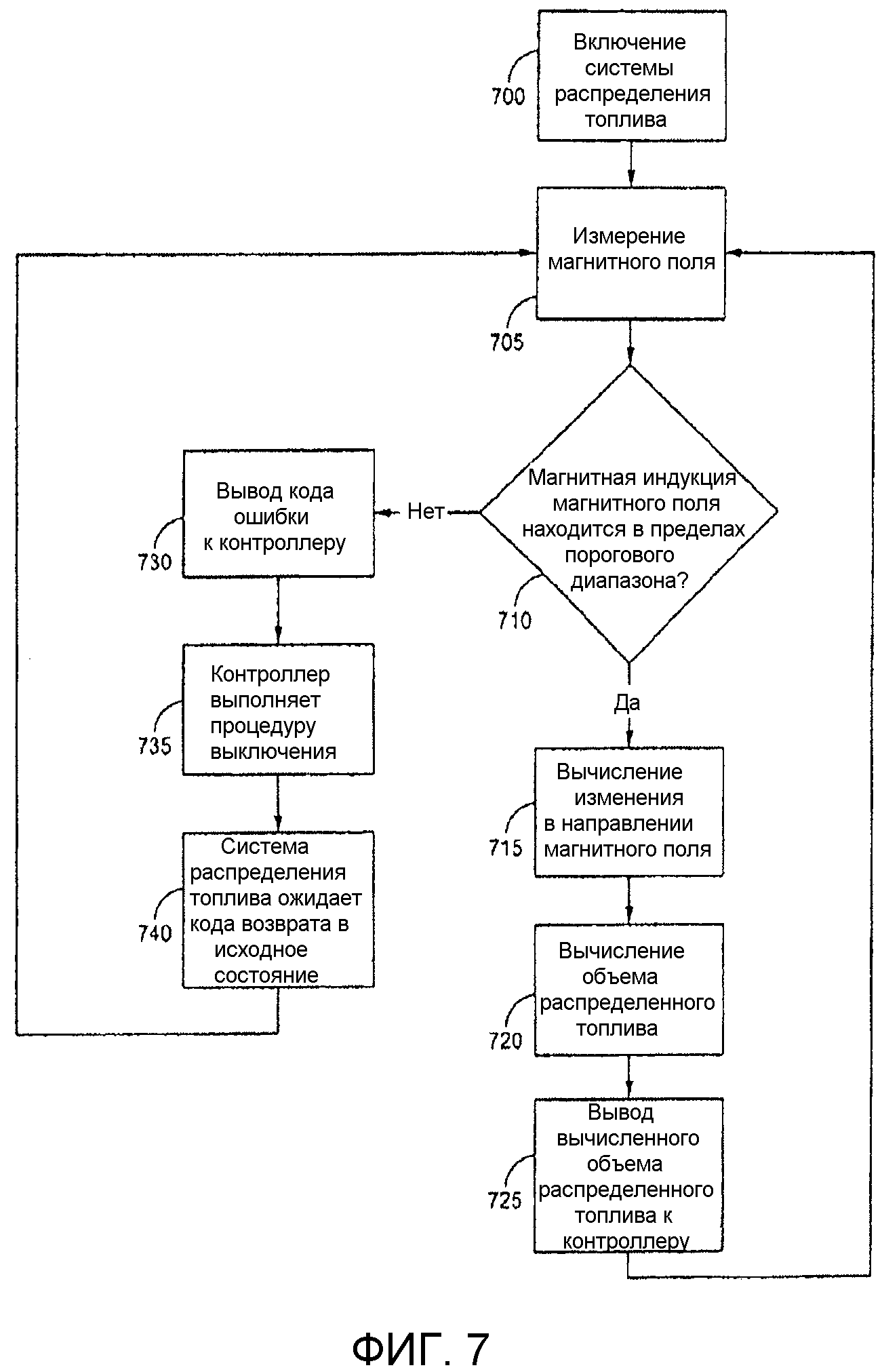
[0018] Фиг.7 - блок схема последовательности операций способа для работы примерного энкодера согласно варианту осуществления настоящего изобретения.
[0019] Фиг.8 - принципиальная схема примерной цепи, встроенной в печатную плату согласно варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0020] Должно быть понятно, что фигуры и описания настоящего изобретения были упрощены для иллюстрации элементов, которые являются существенными для разъяснения настоящего изобретения, при этом в целях ясности исключается множество других элементов, которыми обеспечены системы распределения текучих сред. Однако, поскольку такие элементы хорошо известны в области техники и поскольку они не способствуют лучшему пониманию настоящего изобретения, обсуждение таких элементов не представлено в материалах настоящей заявки. Раскрытие настоящей заявки направлено на все такие изменения и модификации, известные специалистам в данной области техники.
[0021] В последующем подробном описании осуществляется ссылка на прилагаемые чертежи, на которых показаны, но не в качестве ограничения, отдельные варианты осуществления, согласно которым изобретение может быть применено на практике. Должно быть понятно, что различные варианты осуществления изобретения, хотя и являются разными, не обязательно являются взаимно исключающими. Более того, конкретный признак, конструкция или характеристика, описанная в материалах настоящей заявки применительно к одному варианту осуществления, может быть реализована в других вариантах осуществления, не выходя из объема изобретения. Кроме того, должно быть понятно, что расположение или размещение индивидуальных элементов в каждом раскрытом варианте осуществления может быть изменено, не выходя из объема изобретения. Следовательно, последующее подробное описание не должно восприниматься как ограничивающее, а объем настоящего изобретения определен только лишь соответствующим образом интерпретируемой прилагаемой формулой изобретения наряду с полным диапазоном эквивалентов, которые предоставляет формула изобретения. На чертежах подобные позиции ссылаются к одной и той же или подобной функциональности для нескольких видов.
[0022] Вариант осуществления настоящего изобретения включает в себя энкодер для систем распределения текучей среды, выполненных с возможностью определения момента, когда энкодер удаляется из распределяющего механизма. Энкодер может содержать держатель магнита, размещенный на валу, например, поршневого расходомера. Магнит устанавливается и размещается таким образом, чтобы изменять направление магнитного поля при вращении вала. Также энкодер может включать в себя печатную плату (ПП), на которой взаимосвязано с магнитом размещается магнитный датчик. Магнитный датчик выполнен с возможностью обнаружения одного или более параметров, связанных с магнитным полем, например изменений магнитной индукции и направления магнитного поля, выводимого магнитом при вращении вала. Датчик по существу может непрерывно выводить сигналы ПП, представляющие одно или более из магнитной индукции и направления магнитного поля. Энкодер может быть выполнен с возможностью вывода последовательности импульсов, указывающих на вращение вала и соответствующих объему распределенной текучей среды.
[0023] В одном варианте осуществления держатель магнита в энкодере устанавливается плавающим образом, посредством чего позволяя расстоянию между магнитом и датчиком изменяться благодаря силе тяжести. При установке энкодера, вал, продолжающийся вертикально от поршневого расходомера, определяет местоположение магнита на заданном расстоянии от датчика. На всем протяжении работы энкодера магнитный датчик обнаруживает изменения магнитного поля при вращении вала. В течение обычной работы расстояние между вращающимся магнитом и магнитным датчиком остается по существу одним и тем же (например, изменяется меньше чем на 0,05-0,1 см). Благодаря относительному постоянству расстояния изменения магнитной индукции по существу являются результатом вращения вала. Однако если датчик обнаруживает изменения магнитной индукции магнитного поля, указывающие перемещение магнита относительно датчика в осевом направлении, большее, чем заданное пороговое расстояние (например, 0,05-0,1 см), то ПП выполнена с возможностью передачи сигнала ошибки к контроллеру дозатора топлива.
[0024] По причине плавающего расположения магнита удаление энкодера с дозатора топлива позволяет магниту перемещаться, по меньшей мере, на пороговое расстояние от магнитного датчика под действием силы тяжести, посредством чего вызывает передачу сигнала ошибки. Такое передвижение магнита под действием силы тяжести в ответ на удаление энкодера может быть описано как признак опускания магнита. При приеме сигнала ошибки от ПП контроллер дозатора топлива может быть выполнен, чтобы выключать насос дозатора топлива. При этом насос будет оставаться выключенным, пока не будет введен код возврата в исходное состояние для возврата системы в исходное состояние. Это может быть выполнено, например, сотрудником заправочной станции.
[0025] Фиг.1 - вид в перспективе сверху энкодера 200 согласно примерному варианту осуществления настоящего изобретения. Энкодер 200 может содержать корпус 90, имеющий в целом форму продолговатого цилиндра с выступами, выполненными с возможностью соединения или установки на коммерчески доступный поршневой расходомер. Корпус 90 может быть выполнен из жесткого материала, например металла, такого как алюминий или сплав алюминия, и может быть изготовлен традиционным образом, например отливкой, штамповкой и/или машинной обработкой в качестве неограничивающего примера.
[0026] Как более подробно показано на Фиг.3 и 4, первый конец 91 корпуса 90 может быть прикреплен к упору 20 уплотнения монтажной поверхности поршневого расходомера (поршневой расходомер не показан на фигурах в отличие от вала 10, продолжающегося из него) посредством традиционных монтажных средств, например крепежных винтов 180. Упор 20 уплотнения может содержать пластину или прокладку для уплотнения зоны между стыкующимися поверхностями и для обеспечения уплотнения поршневого расходомера.
[0027] Энкодер 200 включает в себя печатную плату (ПП) 70, установленную в полости 310 (Фиг.3), определенной на втором конце 92 корпуса 90, удаленного от первого конца 91. ПП 70 может быть установлена посредством традиционного монтажного средства, например крепежных винтов 170 ПП. Корпус 90 также может включать в себя отверстия с резьбой, выполненные с возможностью приема крепежных винтов 170 ПП.
[0028] Фиг.2 является видом в перспективе снизу энкодера 200. Как изложено выше, корпус 90 может быть прикреплен к упору 20 уплотнения посредством крепежных винтов 180 (показаны концы с резьбой крепежных винтов 180). Вал 10 продолжается из поршневого расходомера через упор 20 уплотнения во внутреннюю часть корпуса 90 для зацепления с держателем 30 магнита (Фиг.3). Вал 10 выполнен с возможностью вращения со скоростью, соответствующей количеству топлива, проходящего через поршневой расходомер, но не в качестве ограничивающего примера, со скоростью вращения вплоть до 500 оборотов в минуту (об/мин) или 10000 об/мин для осевого расходомера. Один или более винтов 190 упора уплотнения могут крепить упор уплотнения к монтажной поверхности поршневого расходомера.
[0029] Фиг.3 является сечением энкодера 200, взятого вдоль линии АА Фиг.1. Как описано выше со ссылкой на Фиг.1 и 2, упор 20 уплотнения может быть установлен на внешнюю поверхность поршневого расходомера посредством винтов 190 упора уплотнения. Первый конец 91 корпуса 90 может быть установлен на упор 20 уплотнения посредством крепежных винтов 180. Стыкующаяся поверхность корпуса 90, контактирующая с упором 20 уплотнения, может быть выполнена с возможностью обеспечения одного или более углублений 210, действующих для предотвращения контакта между корпусом 90 и винтами 190 упора уплотнения, посредством чего позволяя поверхности корпуса 90 быть установленной впритык к поверхности упора уплотнения 20. Установка впритык друг к другу может обеспечить уплотнение границы между энкодером 200 и поршневым расходомером для минимизации потенциальной утечки топлива.
[0030] Первый конец 91 корпуса 90 определяет полость 220 магнита. Полость 220 магнита может содержать полый внутренний участок корпуса 90, охватывающий пространство от первого конца 91 до стенки 230 разделения полости. Первый конец полости 220 магнита около упора уплотнения 20 может быть по существу открытым, посредством чего позволяя держателю 30 магнита скользящим образом вставляться в нее. Поверхность стенки 230 разделения полости определяет второй конец полости 220 магнита, противоположный упору 20 уплотнения. Поверхность стенки 230 разделения полости, обращенная к упору 20 уплотнения, может включать в себя цилиндрически углубленный участок 240, находящийся в центре поверхности. Углубленный участок 240 может содействовать выравниванию держателя 30 магнита относительно центральной оси полости 220 магнита, посредством чего выравнивая магнит 50, размещенный в держателе 30 магнита, с магнитным датчиком 80. Внутренняя поверхность корпуса 90, определяющая полость 220 магнита, а также поверхность корпуса 90, определяющая край углубленного участка 240, могут иметь небольшой уклон (например, для каждой стороны уклон -1,5°), облегчающий вставку участка держателя 30 магнита в углубленный участок 240.
[0031] Главным образом со ссылкой на Фиг.3, 6a, 6b и 6c держатель 30 магнита выполнен с возможностью установки магнита 50 на один конец вала 10, продолжающийся из поршневого расходомера. Первый конец держателя 30 магнита, выполненный с возможностью удержания магнита 50, может быть по существу плоским с цилиндрической равномерно выступающей центральной областью 250. Выступающая центральная область 250 может иметь диаметр немного меньший, чем диаметр углубленного участка 240 стенки 230 разделения для содействия выравниванию магнита 50 и магнитного датчика 80. Выступающая центральная область 250 может иметь скошенный край (например, скошенный под 45° край) для дополнительного содействия вкладывания ее в углубленный участок 240. Держатель 30 магнита может быть изготовлен традиционным образом из жесткого материала, например, Derlin® AF Extended Wear, продаваемого McMaster Carr.
[0032] Держатель 30 магнита может содержать выемку 260 под магнит, выполненную с возможностью обеспечения вкладывания и удержания магнита 50. Форма и размеры выемки 260 под магнит могут полностью коррелировать с формой и размерами магнита 50. В качестве примера на Фиг.6а показан держатель 30 магнита с выемкой 260 под магнит, выполненной с возможностью приема магнита 50, имеющего квадратное сечение. Выемка 260 под магнит может быть выполнена с возможностью быть слегка более глубокой, чем магнит 50, посредством чего позволяя магниту 50 быть немного утопленным (например, утопленным на около 0,05 см). Держатель 30 магнита может дополнительно включать в себя отверстие 270 для адгезива, содержащего центральный канал через держатель 30 магнита, выполненный с возможностью прохождения адгезива (например, клея или эпоксидной смолы) через участок держателя 30 магнита между выемкой 260 под магнит и зоной 280 границы вала.
[0033] Зона 280 границы вала (показана на Фиг.6b и 6с) образована интегрально в держателе 30 магнита с противоположной стороны от выемки 260 под магнит. Зона 280 границы вала в целом может определять цилиндрическую полость, завершающуюся полуконической поверхностью 290, выполненной с возможностью приема вала 10. Зона 280 границы вала облегчает установку держателя 30 магнита и магнита 50 на вал 10 таким образом, что магнит 50 вращается с такой же скоростью, как и вал 10. Примеры энкодеров 200 могут дополнительно включать в себя универсальный шарнир (U-шарнир) 60 (показанный на Фиг.3), соединенный как с держателем 30 магнита, так и с валом 10 посредством пальца 140 U-шарнира. Палец U-шарнира 140 может быть типичным пальцем, например пальцем с головкой, при этом может проходить через пазы 300 в держателе 30 магнита и может проходить через канал в вале 10, посредством чего обеспечивая совместное вращение держателя 30 магнита и вала 10. U-шарнир 60 и палец U-шарнира 140 могут действовать для компенсации небольших угловых колебаний или угловых отклонений от оси вала 10 в отношении энкодера 200.
[0034] В области 280 границы вала может быть размещен амортизатор 40 из пеноматериала (Фиг.3). Амортизатор 40 из пеноматериала может содержать амортизирующий пеноматериал и может быть выполнен с возможностью сохранения контакта между выступающей центральной областью 250 держателя 30 магнита и углубленным участком 240 стенки 230 разделения полости. В качестве примера амортизатор 40 из пеноматериала может контактировать или расширяться для восполнения перемещения вала 10 вплоть до 1,5 см, при этом сохраняя контакт между выступающей центральной областью 250 держателя 30 магнита и углубленным участком 240 стенки 230 разделения полости.
[0035] Магнит 50 и амортизатор 40 из пеноматериала могут быть приклеены к держателю 30 магнита, например, за счет приклеивания магнита 50 в своем местоположении, используя адгезив или эпоксидную смолу, за счет вкладывания амортизатора 40 из пеноматериала в зону 280 границы вала после приклеивания магнита 50 и за счет предоставления возможности клею из выемки 260 под магнит перемещаться через отверстие 270 для адгезива, посредством чего приклеивая поверхность амортизатора 40 из пеноматериала к полуконической поверхности 290 держателя 30 магнита. Амортизатор 40 из пеноматериала дополнительно служит для предотвращения входа остатков адгезива в зону 280 границы вала.
[0036] Держатель 30 магнита с приклеенным к нему магнитом 50 и амортизатором 40 из пеноматериала может быть установлен в полость 220 магнита корпуса 90 перед установкой энкодера 200 на упор 20 уплотнения и соответствующий поршневой расходомер. Держатель 30 магнита может быть вставлен в полость 220 магнита таким образом, что сначала в полость 220 магнита войдет конец держателя 30 магнита, содержащий магнит 50. Держатель 30 магнита может быть скользящим образом размещен в полости 220 магнита. Как можно увидеть на Фиг.4, после завершения вкладывания держателя 30 магнита в полость 220 магнита, может быть вставлено стопорное устройство, например цилиндрический штифт 150 (для тугой посадки) через отверстие 312 цилиндрического штифта таким образом, что когда конец цилиндрического штифта 150 выступает в полости 220 магнита, образуется достаточный интервал так, чтобы предотвратить удаление держателя 30 магнита из полости 220 магнита, но так, чтобы не воспрепятствовать вставке вала 10 в зону 280 границы вала держателя 30 магнита. В качестве примера цилиндрический штифт 150 может быть туго посажен в отверстие 312 цилиндрического штифта таким образом, что цилиндрический штифт 150 будет продолжаться в полость 220 магнита на заданное расстояние, например 0,4 см. Цилиндрический штифт 150 может быть размещен таким образом, чтобы допускать осевое смещение держателя 30 магнита в полости 220 магнита. В альтернативных вариантах осуществления предусматриваются другие стопорные устройства, например стопорное устройство с резьбой, такое как стопорный винт, адгезив или резьбовая компоновка между корпусом 90 и держателем 30 магнита.
[0037] Продолжая, со ссылкой к Фиг.4 показана ПП, установленная в полости 310 корпуса 90. ПП 70 может быть неподвижно установлена на участки корпуса 90, находящиеся на расстоянии от поверхности стенки 230 разделения полости в полости 310 ПП. Подобная установка ПП 70 обеспечивает зазор (например, зазор около 0,75-1,5 см) между поверхностью ПП 70, обращенной к стенке 230 разделения полости, и стенкой 230 разделения полости (Фиг.5).
[0038] Со ссылкой на Фиг.5 показан детализированный вид сечения СС Фиг.3. Показанная ПП 70 имеет магнитный датчик 80, установленный в центре и соответствующий магниту 50. Магнитный датчик 80 может быть размещен, например, на расстоянии от около 0,12-0,38 см от магнита 50. Магнитный датчик 80, выполненный с возможностью обнаружения изменения магнитной индукции и направления магнитного поля, выведенного магнитом 50 при вращении вала, по существу постоянно выводит сигналы 70 ПП, представляющие магнитную индукцию и направление магнитного поля. В качестве неограничивающего примера магнитный датчик 80 может быть коммерчески доступным от различных производителей, например, может быть моделью KMT32B, изготавливаемой Measurement Specialties, Inc, являющейся патентообладателем. В качестве неограничивающего примера магнит 50 может быть реализован как коммерчески доступный магнит NdFeB.
[0039] Вариант осуществления, показанный на Фиг.5, включает в себя полиимидную пленку 120, приклеенную к поверхности стенки 230 разделения полости, направленной к ПП 70, например, адгезивом, например адгезивной пленкой. Полиимидная пленка 120 может потребоваться в качестве второго слоя изоляции для удовлетворения нормативных требований таких, как нормативы Европейского Союза, в целом известные как ATEX для оборудования, использующегося в потенциально взрывоопасных окружающих средах. В альтернативных вариантах осуществления энкодера 200 полиимидная пленка 120 может быть опущена.
[0040] Энкодер 200 полностью собран, когда ПП 70 установлена в полость 310 ПП и зафиксирована крепежными винтами 170, при этом держатель 30 магнита установлен в полость 220 магнита и зафиксирован цилиндрическим штифтом 150. Полностью собранный энкодер 200 может быть установлен на поршневой расходомер в соответствии со следующими этапами. Энкодер 200 вертикально опускается на вал 10, продолжающийся из поршневого расходомера. Вал 10 сначала входит в полость 220 магнита, затем входит в зону 280 границы вала держателя 30 магнита. Энкодер 200 продолжает опускаться вертикально, побуждая вал 10 осуществить контакт с амортизатором 40 из пеноматериала, и продолжает поднимать держатель 30 магнита вертикально по направлению к стенке 230 разделения полости и, следовательно, в окрестность датчика 80. После того как выступающая центральная область 250 держателя 30 магнита осуществит контакт с углубленным участком 240 стенки 230 разделения полости, вал 10 частично сожмет амортизатор 40 из пеноматериала. Сжатие амортизатора 40 из пеноматериала может обеспечить постоянный контакт между держателем 30 магнита и стенкой 230 разделения полости на всем протяжении операции по компенсации слабых перемещений вала 10 (например, перемещения вплоть до 0,15 см). Затем корпус 90 может быть закреплен по отношению к упору 180 уплотнения за счет установки крепежных винтов 180 в отверстия корпуса 90 и в отверстия с резьбой в упоре уплотнения. Понятно, что энкодер 200 конструируется согласно спецификациям и размерам поршневого расходомера, на который он устанавливается. Соответственно, расстояние от первого конца корпуса 90, который контактирует с упором 20 уплотнения, до стенки 230 разделения полости проектируется согласно длине вала 10. Такая конструкция обеспечивает то, что при установке корпуса 90 на поршневой расходомер выступающая центральная область 250 держателя 30 магнита контактирует с углубленным участком 240 стенки 230 разделения полости.
[0041] В течение обычной работы системы распределения топлива поршневой расходомер вращает вал 10 согласно количеству распределенного топлива. При вращении вала 10 магнит 50 вращается с идентичной (или пропорциональной) скоростью. Магнитный датчик 80 по существу непрерывно обнаруживает изменения в магнитной индукции и в направлении магнитного поля, которое создано магнитом 50, когда вал 10 вращается, и выводит сигналы ПП 70, представляющие магнитную индукцию и направление магнитного поля. ПП 70 соединена с контроллером топливного насоса посредством интерфейса связи, например шифрованной линии RS-485. Когда топливный насос распределяет топливо, ПП 70 выводит к контроллеру данные, указывающие количество распределенного топлива.
[0042] При типичной работе магнит 50 остается по существу на неизменном расстоянии от магнитного датчика 80 (например, около 0,2 см). Из-за вибрации подвижных частей в поршневом датчике расстояние между магнитом 50 и магнитным датчиком 80 может несущественно изменяться при обычных условиях работы. Таким образом, энкодер 200 может обладать допусками на изменение магнитного поля в пороговом диапазоне (например, колебания изменений для относительного расстояния между магнитным датчиком 80 и магнитом составляют около 0,05-0,1 см). Однако если магнитный датчик 80 измеряет отклонение в магнитном поле, выходящее за рамки порогового диапазона, соответствующее относительному расстоянию между магнитным датчиком 80 и магнитом 50 (например, отличающееся больше чем на 0,1 см), один или более процессоров ПП 70 выводят код ошибки к контроллеру топливного насоса посредством интерфейса связи. В ответ на код ошибки контроллер может отключить топливный насос, и топливный насос может оставаться отключенным, пока не будет введен код возврата в исходное состояние и насос полностью не будет возращен в исходное состояние.
[0043] В одном варианте осуществления, поскольку энкодер 200 может быть установлен по существу вертикально на поршневой расходомер, попытка удалить энкодер 200 с поршневого расходомера приведет к тому, что сила тяжести позволит плавающему держателю 30 магнита опуститься в направлении от магнитного датчика 80. Таким образом, попытка вора или вандала деактивировать энкодер 200 за счет удаления его с поршневого расходомера приведет к обнаружению магнитным датчиком 80 попытки удаления энкодера 200, и в свою очередь топливный насос будет отключен или деактивирован.
[0044] Помимо обнаружения удаления энкодера, варианты осуществления настоящего изобретения также могут быть действенными в обнаружении и/или быть защищенными от магнитных полей, внесенных устройствами, предназначенными для дезорганизации нормальной работы энкодера. Более точно, из-за близкого расстояния между магнитным датчиком 80 и магнитом 50 (например, около 0,2 см) энкодер 200 может не подвергаться влиянию, например, магнитного поля с высокой магнитной индукцией, сформированного мощным магнитом (в качестве примера электромагнитом), предназначенным для препятствования точной работе магнитного датчика 80 в энкодере 200. Однако в случае, если введено магнитное поле, имеющее достаточную напряженность для изменения магнитной индукции измеряемого магнитного поля за пределы заданного диапазона (например, индукции, соответствующей заданному пороговому интервалу), то ПП 70 выполнена с возможностью передачи сигнала ошибки к контроллеру дозатора топлива.
[0045] Приведенное выше в целом описывает механизм скольжения между держателем 30 магнита и полостью 220 магнита, что обеспечивает признак опускания магнита 50 относительно магнитного датчика 80 под действием силы тяжести. Однако также предусматривается возможность смещения держателя 30 магнита в направлении, противоположном магнитному датчику, механическим средством, например пружиной или упругим элементом, таким образом, позволяя установку энкодера в ориентации, отличной от вертикальной относительно расходомера текучей среды, при этом сохраняя описанную выше компоновку, направленную против вмешательства.
[0046] В варианте осуществления контроллер может предоставлять визуальный и/или звуковой сигнал предупреждения для специалиста, отвечающего за отслеживание работы насоса. В этом случае специалист может предоставить сигнал посредством контроллера, что приведет к остановке насоса. В другом варианте осуществления контроллер может быть выполнен, чтобы деактивировать топливный насос, например, предоставляя выходной сигнал, который приводит к размыканию переключателя для отключения подачи питания к насосу. В другом варианте осуществления контроллер может быть выполнен, чтобы деактивировать топливный насос, пока не принят подходящий код, указывающий проверку менеджером или другим специалистом в удаленном расположении, например, за счет просмотра соответствующим специалистом видео месторасположения насоса.
[0047] Фиг.7 является блок-схемой последовательности операций, описывающей работу примерного энкодера 200. На этапе 700 система распределения топлива включается. Включение системы распределения топлива может прекратить подачу питания к компонентам системы, в качестве неограничивающего примера - энкодеру 200, топливному насосу и контроллеру. На этапе 705 магнитный датчик 80 измеряет магнитную индукцию и направление магнитного поля, созданного магнитом 50, и выводит сигнал, указывающий эти характеристики к ПП 70. На этапе 710 процессор на ПП 70 сравнивает магнитную индукцию, обнаруженную магнитным датчиком 80, с пороговым диапазоном магнитных индукций, соответствующих расстояниям магнита 50 от магнитного датчика 80. В качестве примера пороговый диапазон может соответствовать расстояниям магнита 50 от магнитного датчика 80, изменяющимся в пределах от 0,5 до 1 см, и может быть откорректирован программным обеспечением.
[0048] Если на этапе 710 процессор ПП 70 определяет, что измеренная магнитная индукция является большей или меньшей порогового значения, то магнит должен находиться на расстоянии большем порогового от магнитного датчика, или на датчик оказывается влияние внешнего магнитного поля, и последовательность операций переходит на этап 730. На этапе 730 ПП 70 выводит код ошибки к контроллеру системы распределения топлива, например, за счет передачи сигнала по шифрованной линии передачи RS-485. На этапе 735 контроллер принимает код ошибки и выполняет процедуру выключения. На этапе 740 система распределения топлива остается выключенной, пока полномочный пользователь (например, менеджер) не введет пароль/код возврата в исходное состояние. Пароль возврата в исходное состояние может быть введен, например, из удаленного местоположения, например из здания. При приеме пароля возврата в исходное состояние последовательность операций возвращается к этапу 705, при этом возобновляется измерение магнитного поля.
[0049] Если на этапе 710 процессор на ПП 70 определяет, что измеренная магнитная индукция находится в пределах порогового диапазона, то последовательность операций переходит к этапу 715. На этапе 715 процессор на ПП 70 вычисляет изменение в направлении магнитного поля, созданного магнитом 50, соответствующим вращению магниту 50 на вале 10. На этапе 720 процессор на ПП 70 вычисляет количество распределенного топлива на основе заданного коэффициента калибровки (т.е. коэффициента пересчета, коррелирующего вращение вала 10 в объем распределенного топлива). На этапе 725 ПП 70 выводит сигнал, указывающий объем распределенного топлива, к контроллеру платы через линию передачи. После этапа 725 энкодер 200 возвращается на этап 705, и магнитный датчик снова 80 измеряет магнитное поле, созданное магнитом 50. Этапы с 705 по 725 могут периодически/апериодически повторяться согласно синхронизатору, связанному с ПП 70.
[0050] На Фиг.8 показана принципиальная схема примерной цепи 800, встроенной в печатную плату, согласно варианту осуществления настоящего изобретения. Цепь 800 включает в себя микропроцессор 801, выполненный, чтобы отслеживать выходную информацию датчика, измеряющего напряженность магнитного поля, создаваемого магнитом (например, магнитом 50 примерного энкодера 200, показанного на Фиг.3). Магнитный датчик по существу непрерывно выводит измеренную напряженность магнитного поля к микропроцессору 801. Когда напряженность магнитного поля значительно увеличивается или уменьшается, значение на выводе 803 микропроцессора 801 изменяется, посредством чего указывая, что относительное расстояние между магнитным датчиком и магнитом было значительно увеличено (например, энкодер был удален с поршневого расходомера) или что датчик подвергся действию внешнего магнитного поля. Центральный микропроцессор 802 выполнен, чтобы в целом осуществлять слежение за компонентами, встроенными в печатную плату, и выводить сигналы к нижерасположенным компонентам, соответствующим отслеживаемым компонентам. В качестве примера центральный микропроцессор 802 выполнен, чтобы отслеживать вывод 803 микропроцессора 801. Когда значение вывода 803 изменяется, центральный микропроцессор 802 может отправить сигнал тревоги к нижерасположенным компонентам через среду передачи (например, шифрованную линию RS-485), оперативным образом соединяющую нижерасположенные компоненты с первым выводным портом 804 и вторым выводным портом 805.
[0051] Альтернативные варианты осуществления настоящего изобретения могут реализовать машинный код, хранимый на машиночитаемом носителе, например на оптическом накопителе или другой памяти, только в качестве примера. Машинный код сконфигурирован так, чтобы выполнять этапы по анализу сигналов, указывающих магнитную индукцию и направление магнитного поля, которые измеряются магнитным датчиком, определению, находится ли магнитная индукция и направление магнитного поля в пределах порогового диапазона, выводу сигнала ошибки, если магнитная индукция находится за пределами порогового диапазона, и вычислению и выводу объема распределенного топлива, соответствующего изменению в направлении магнитного поля, если магнитная индукция находится в пределах порогового диапазона.
[0052] Хотя изложенное выше в целом предусматривает пороговые значения магнитной индукции, соответствующие расстояниям между магнитным датчиком и магнитом, пороговые значения могут изменяться. В качестве примера инструкции программного обеспечения, выполняемые компонентами ПП 70, могут быть модифицированы для предоставления альтернативных пороговых диапазонов/значений магнитной индукции, посредством чего допуская изменение расстояний между магнитным датчиком и магнитом.
[0053] Хотя изложенное выше описывает варианты осуществления настоящего изобретения, реализующие энкодер для использования в системе распределения топлива, раскрытые варианты осуществления и альтернативные варианты осуществления могут быть применены в системах распределения текучих сред, отличных от топлива.
[0054] Хотя изложенное выше описывает преимущество вариантов осуществления настоящего изобретения, заключающееся в предотвращении вмешательства, которое облегчает кражу топлива или других текучих сред, настоящее изобретение может быть применено для обнаружения вмешательства в целях, отличных от кражи.
[0055] Хотя изложенное выше в целом описывает варианты осуществления настоящего изобретения, реализующие энкодер для использования в системе распределения топлива, альтернативные варианты осуществления настоящего изобретения могут предоставить устойчивый к вмешательству энкодер, предусмотренный для работы в средах с высокой пожароопасностью. В качестве неограничивающего примера альтернативный вариант осуществления настоящего изобретения может быть реализован для измерения оборотов валов буровых вышек или другого оборудования в присутствии потенциально воспламеняемой атмосферы.
[0056] Хотя изложенное выше в целом описывает установку различных частей посредством крепежных винтов, могут быть реализованы альтернативные технические средства согласно требованиям реализации изобретения. В качестве примера вместо крепежных винтов могут быть реализованы заклепки или цилиндрические штифты. В качестве альтернативы различные компоненты могут стыковаться за счет адгезивной стыковки примыкающих поверхностей.
[0057] Хотя изложенное выше описывает примерные варианты осуществления и реализации, специалистам в данной области техники будет очевидно, что для настоящего изобретения могут быть осуществлены различные модификации и изменения, не выходя из сущности и объема изобретения.
Реферат
Изобретение относится к измерительной технике, представляет собой энкодер с возможностью обнаружения кражи и может быть использовано в системах распределения и отпуска текучих сред, например жидкого топлива. Энкодер устанавливается на вал, продолжающийся из поршневого расходомера, и выполнен с возможностью вычисления объема распределенной текучей среды. Энкодер включает в себя магнит, магнитный датчик и печатную плату. Магнит закреплен на вале посредством плавающего магнитного держателя. Магнитный датчик позволяет измерять магнитную индукцию и направление магнитного поля, созданного магнитом, и выводить сигнал, указывающий магнитную индукцию и направление магнитного поля, к печатной плате. Печатная плата позволяет выводить сигнал, указывающий объем распределенной текучей среды, если в энкодер не было осуществлено вмешательства, или сигнал ошибки, если в энкодер было осуществлено вмешательство. 5 н. и 17 з.п. ф-лы, 10 ил.
Формула
магнитный датчик, выполненный рядом с магнитом, функционально связанным с измерительным устройством для текучей среды, причем упомянутый датчик выполнен с возможностью формирования первого выходного сигнала, указывающего измеренное магнитное поле, связанное, по меньшей мере, частично с магнитом измерительного устройства для текучей среды, при этом упомянутый датчик и магнит находятся на заданном расстоянии друг от друга, и
контроллер, реагирующий на первый выходной сигнал и выполненный с возможностью сравнивать первый выходной сигнал с заданным пороговым значением, связанным с упомянутым заданным расстоянием, причем контроллер дополнительно выполнен с возможностью формировать второй выходной сигнал, когда первый выходной сигнал больше или меньше порогового значения,
при этом магнит является подвижным внутри энкодера вдоль осевого направления выходного вала между первым местоположением и вторым местоположением относительно магнитного датчика, причем магнит смещен в первое местоположение, когда энкодер находится в установленном местоположении относительно измерительного устройства для текучей среды, и
магнит смещен во второе местоположение относительно магнитного датчика, когда энкодер, по меньшей мере, частично удален из измерительного устройства для текучей среды.
измеряют магнитным датчиком магнитное поле, сформированное, по меньшей мере, частично магнитом, функционально связанным с вращающимся валом измерительного устройства для текучей среды, причем упомянутый вал выполнен с возможностью вращения согласно объему распределенной текучей среды, при этом магнитный датчик выполнен рядом с магнитом;
сравнивают измеренное магнитное поле с заданным пороговым значением, указывающим магнитное поле магнита на заданном расстоянии от магнитного датчика; и
на основании упомянутого сравнения формируют выходной сигнал, когда измеренное магнитное поле больше или меньше заданного порогового значения на недопустимую величину отклонения, указывающий вмешательство в упомянутый энкодер.
магнитный датчик, выполненный рядом с магнитом, функционально связанным с вращающимся валом измерительного устройства для текучей среды, причем упомянутый вал выполнен с возможностью вращения согласно объему распределенной текучей среды, причем упомянутый датчик выполнен с возможностью измерения магнитного поля магнита и формирования выходного сигнала, указывающего измеренное магнитное поле; и
контроллер, выполненный с возможностью сравнения выходного сигнала с пороговым значением, представляющим магнитное поле магнита на заданном расстоянии от упомянутого датчика, и на основе упомянутого сравнения определения, расположен ли или нет энкодер в целевой области, представляющей местоположение для правильной работы и распределения топлива относительно измерительного устройства для текучей среды.
магнитный датчик, выполненный рядом с магнитом, функционально связанным с вращающимся валом измерительного устройства для текучей среды, причем упомянутый вал выполнен с возможностью вращения согласно объему распределенной текучей среды,
причем упомянутый датчик выполнен с возможностью формирования выходного сигнала, указывающего измеренное магнитное поле, связанное, по меньшей мере, частично с магнитом измерительного устройства для текучей среды, упомянутый датчик и магнит находятся на заданном расстоянии друг от друга, когда энкодер находится в установленном местоположении, и
контроллер, реагирующий на выходной сигнал и выполненный с возможностью сравнения выходного сигнала с пороговым значением, соответствующим магнитному полю магнита на заданном расстоянии от упомянутого датчика, и на основе упомянутого сравнения контроллер дополнительно выполнен с возможностью формирования второго выходного сигнала, когда упомянутый выходной сигнал больше или меньше порогового значения на недопустимую величину отклонения, указывающего вмешательство в упомянутый энкодер.
магнитный датчик, выполненный рядом с магнитом, функционально связанным с вращающимся выходным валом измерительного устройства для текучей среды, причем упомянутый вал выполнен с возможностью вращения согласно объему распределенной текучей среды,
причем упомянутый датчик выполнен с возможностью формирования выходного сигнала, указывающего измеренное магнитное поле, связанное, по меньшей мере, частично с магнитом измерительного устройства для текучей среды, упомянутый датчик и магнит находятся на заданном расстоянии друг от друга, когда энкодер находится в установленном местоположении, и
контроллер, выполненный с возможностью сравнения выходного сигнала с пороговым значением, соответствующим магнитному полю магнита на заданном расстоянии от упомянутого датчика, и деактивации системы распределения текучей среды, когда упомянутый выходной сигнал больше или меньше порогового значения на недопустимую величину отклонения, указывая вмешательство в упомянутый энкодер.
Комментарии