Отсоединяемый силовой привод для задних откидных бортов - RU2608941C2
Код документа: RU2608941C2
Чертежи







Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к задним откидным бортам транспортного средства типа пикап и устройствам управления для задних откидных бортов транспортного средства типа пикап.
УРОВЕНЬ ТЕХНИКИ
Существует общее направление развития для автотранспортных средств больших размеров. В частности, для потребителей популярны большие пикапы. Увеличенный размер пикапа приводит к большему числу компонентов, в том числе большим задним откидным бортам. Большие задние откидные борта являются более тяжелыми и более высоко расположенными над грунтом, чем более маленькие автотранспортные средства, что может создавать трудности для некоторых пользователей в управлении задним откидным бортом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В этом описании описано устройство управления для задних откидных бортов транспортного средства. Устройство управления содержит первую зубчатую передачу, которая присоединена к приводному гнезду, предпочтительно втулке, и вторую зубчатую передачу, которая присоединена к двигателю для приведения в действие второй зубчатой передачи. Приводная втулка присоединена с возможностью съема к кузову грузового транспортного средства. Устройство управления также включает в себя устройство для сцепления, размещенное между первой и второй зубчатыми передачами. Устройство для сцепления присоединено ко второй зубчатой передаче, и оно может перемещаться между зацепленным положением и расцепленным положением. Когда устройство для сцепления находится в зацепленном положении, оно зацепляет первую зубчатую передачу и соединяет первую зубчатую передачу и вторую зубчатую передачу таким образом, чтобы крутящий момент, действующий на вторую зубчатую передачу, мог передаваться на первую зубчатую передачу и приводную втулку. Когда устройство для сцепления находится в расцепленном положении, первая и вторая зубчатые передачи не соединены.
В этом описании также описан вариант устройства управления. Вариантное устройство управления содержит зубчатую передачу, которая присоединена к приводной втулке, устройству для сцепления и тормозному устройству. Приводная втулка может быть присоединена с возможностью съема к кузову грузового транспортного средства. Устройство для сцепления присоединено к зубчатой передаче и может перемещаться между зацепленным положением и расцепленным положением. При этом в зацепленном положении устройство для сцепления соединяет первую зубчатую передачу с тормозным устройством. В то время как сцепление находится в расцепленном положении, зубчатая передача и тормозное устройство не соединены.
Предпочтительно, устройство управления и вариантное устройство управления размещены в заднем откидном борту пикапа.
Если требуется, устройство управления и вариантное устройство управления могут также содержать поворотный амортизатор. Поворотный амортизатор регулирует скорость, с которой задний откидной борт может быть открыт вручную, когда устройство для сцепления находится в расцепленном положении. Регулирование скорости ручного открывания заднего откидного борта может уменьшать силу удара, которая создается, когда задний откидной борт поворачивается в полностью открытое положение. Обычно, один или несколько кабелей соединяют кузов пикапа и задний откидной борт с возможностью удержания заднего откидного борта в полностью открытом положении. Ограничение скорости ручного открывания заднего откидного борта может позволять одному или нескольким кабелям иметь меньший размер, меньшую массу, и быть купленными, или изготовленными, с более низкой стоимостью. Поворотный амортизатор также может обеспечивать плавное движение, когда задний откидной борт открывается вручную.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой схематичный вид кузова пикапа и заднего откидного борта для использования с пикапом.
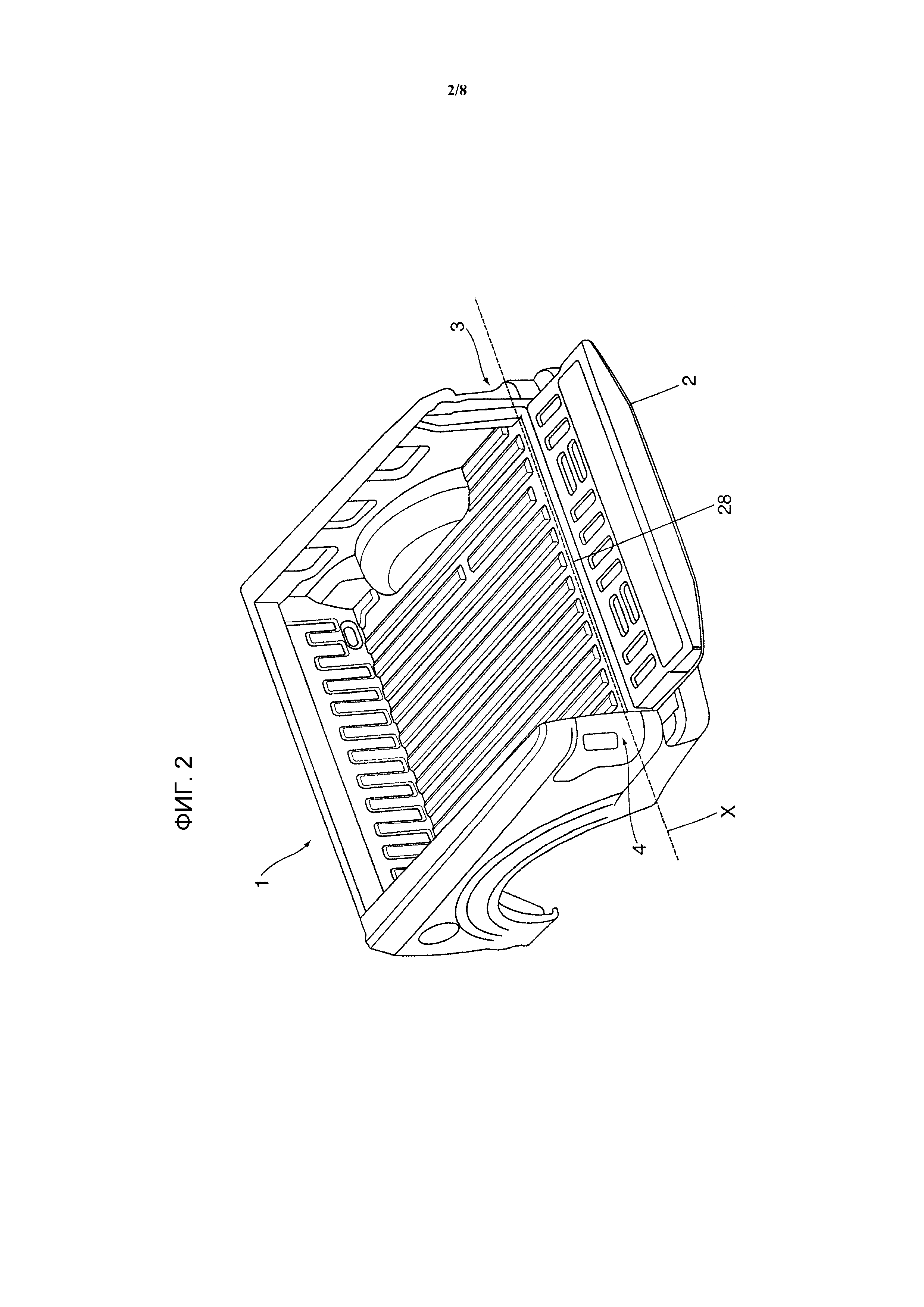
Фиг. 2 представляет собой схематичный вид кузова пикапа согласно фиг. 1, с задним откидным бортом, показанным в открытом положении.
Фиг. 3А и 3В представляют собой схематичные виды двух внутренних поверхностей задней стойки в кузове пикапа согласно фиг. 1
Фиг. 4А и 4В представляют собой схематичные виды двух внешних боковых стенок заднего откидного борта согласно фиг. 1.
Фиг. 5 представляет собой схематичный чертеж боковой проекции примерного устройства управления для использования с кузовом и задним откидным бортом пикапа согласно фиг. 1.
Фиг. 6 представляет собой альтернативный пример устройства управления для использования с кузовом и задним откидным бортом пикапа согласно фиг. 1.
Фиг. 7 представляет собой схематичный чертеж боковой проекции примерного поворотного амортизатора для использования с устройством управления согласно фиг. 5.
Фиг. 8 представляет собой схематичный чертеж, который изображает конструктивную особенность удаления заднего откидного борта.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг. 1 изображает задний конец пикапа, включающий в себя кузов 1 пикапа с задним откидным бортом 2 в закрытом положении. Кузов 1 пикапа имеет две задние стойки 3, 4, размещенные на конце, и на обеих сторонах, кузова 1 пикапа. Фиг. 2 изображает кузов 1 пикапа, с задним откидным бортом 2 в открытом положении. Задний откидной борт 2 присоединен с возможностью поворота к кузову 1 пикапа с помощью петли, размещенной на нижнем участке задних стоек 3, 4. Петля содержит два охватываемых участка 5, 6 (см. фиг. 3А и 3В) и два охватывающих участка 7, 8 (см. фиг. 4А и 4В). В частности, охватываемый участок 6 может называться охватываемая ведущая часть 6 и охватывающий участок 8 может называться охватывающая ведущая часть 8. Два охватываемых участка 5, 6 могут быть фиксированы к нижнему участку внутренних боковых краев задних стоек 3, 4. Два охватывающих участка 7, 8 могут быть фиксированы к нижнему участку внешних боковых стенок заднего откидного борта 2. Если требуется, эти положения могут быть изменены.
Фиг. 3А изображает охватываемый участок 5 прикрепленный к задней стойке 3. На этом виде не показан задний откидной борт 2. Охватываемый участок 5 включает в себя плоский элемент, который обеспечивает контактную поверхность с задней стойкой 3. Охватываемый участок 5 также включает в себя круговой рычаг 29, который продолжается далее от плоского элемента. Фиг. 4А изображает охватывающий участок 7, прикрепленный к внешней боковой стенке заднего откидного борта 2. Охватывающий участок 7 включает в себя плоский элемент, который обеспечивает контактную поверхность с боковой стенкой заднего откидного борта 2. Охватывающий участок 7 имеет гнездо, в этом случае кольцевую втулку 23, с центральным отверстием, которое продолжается от плоского элемента. Термин «втулка» используется в данном документе для указания гнезда или выемки. Центральное отверстие имеет форму и размер для возможности стыковки с круговым рычагом 29 охватываемого участка 5. Круговой рычаг 29 охватываемого участка 5 вставлен в кольцевую втулку 23 охватывающего участка 7 для образования шарнирной петли. Внутренняя поверхность кольцевой втулки 23 может шарнирно соединяться вдоль внешней поверхности кругового рычага 29, позволяя заднему откидному борту 2 поворачиваться вокруг охватываемого участка 5.
Фиг. 3В изображает охватываемый приводной участок 6 прикрепленный к задней стойке 3. На этом виде не показан задний откидной борт. Охватываемый участок 6 включает в себя плоский элемент, который обеспечивает контактную поверхность с задней стойкой 4. Охватываемый приводной участок 6 также включает в себя приводной рычаг 10, который продолжается далее от плоского элемента. Приводной рычаг 10 фиксирован в отношении плоского элемента. Приводной рычаг 10 содержит две противоположные плоские поверхности 17, 18 и две противоположные дугообразные поверхности 21, 22. Фиг. 4В изображает охватывающий приводной участок 8, прикрепленный к противоположной внешней боковой стенке заднего откидного борта 2, по отношению к охватывающему участку 7. Охватывающий приводной участок 8 включает в себя плоский элемент, который обеспечивает контактную поверхность с боковой стенкой заднего откидного борта 2. Охватывающий приводной участок 8 включает в себя гнездо привода, предпочтительно втулку 9, которая продолжается далее от плоского элемента охватывающего приводного участка 8. Втулка 9 привода содержит центральное отверстие, определенное двумя противоположными плоскими поверхностями 19, 20 и одной дугообразной поверхностью 24. Втулка 9 привода также может включать в себя открытую сторону 25. Предпочтительно, что открытая сторона 25 является противоположной в отношении дугообразной поверхности 24. Открытая сторона 25 имеет размер, позволяющий приводному рычагу 10 входить и выходить из центрального отверстия втулки 9 привода через боковую стенку ведущей втулки 9.
Два охватываемых участка 5, 6 размещены противоположно друг к другу и они по существу выровнены относительно друг друга для образования оси вращения (показана как линия Х на фиг. 2).
Устройство 11 управления может быть размещено в заднем откидном борту 2, как показано на фиг. 4В. Задний откидной борт 2 может включать в себя полую камеру, в которую вставлено устройство 11 управления, и устройство 11 управления может быть непосредственно прикреплено к стенкам камеры заднего откидного борта 2. Устройство 11 управления содержит первую зубчатую передачу 13, вторую зубчатую передачу 15 и двигатель 12 (как показано на фиг. 5). Ведущая втулка 9 присоединена к первой зубчатой передаче 13. Первая зубчатая передача 13 может содержать одну или несколько прямозубых цилиндрических зубчатых передач, косозубых цилиндрических зубчатых передач, конических зубчатых передач, спирально-зубчатых конических передач, червячных передач, плоских конических зубчатых передач, планетарных зубчатых передач и их комбинации. Предпочтительно, что первая зубчатая передача 13 содержит конструкцию из прямозубых цилиндрических зубчатых передач. Вращение первой зубчатой передачи 13 переводится во вращательное перемещение ведущей втулки 9.
Первая зубчатая передача 13 соединена со второй зубчатой передачей 15. Вторая зубчатая передача 15 может содержать одну или несколько прямозубых цилиндрических зубчатых передач, косозубых цилиндрических зубчатых передач, конических зубчатых передач, спирально-зубчатых конических передач, червячных передач, плоских конических зубчатых передач, планетарных зубчатых передач и их комбинации. Предпочтительно, вторая зубчатая передача 15 содержит конструкцию из планетарных зубчатых передач. Двигатель 12 может представлять собой двигатель с электрическим приводом такой, как щеточный двигатель постоянного тока, бесщеточный двигатель постоянного тока, двигатель переменного тока, универсальный электродвигатель или любой другой подходящий электрический двигатель. Двигатель 12 может получать электропитание от аккумулятора механического транспортного средства или других источников электропитания, посредством электронного соединения 28 (показано на фиг. 2). Если требуется, электронное соединение 28 может быть реверсивно соединено с задним откидным бортом 2.
Двигатель 12 обеспечивает вращательное усилие, которое обеспечивает вращение второй зубчатой передачи 15. Вторая зубчатая передача 15 передает крутящий момент на первую зубчатую передачу 13 и, в конечном итоге, на втулку 9 привода, приводя втулку 9 привода во вращение. При вращении втулки 9 привода две противоположные плоские поверхности 19, 20 втулки 9 привода зацепляют две противоположные плоские поверхности 17, 18 приводного рычага 10. Плоские поверхности опираются друг на друга и вращают втулку 9 привода, которая поворачивает задний откидной борт 2 вокруг оси вращения.
Устройство 11 управления также может содержать контроллер 26, который управляет двигателем 12. Контроллер 26 может содержать один или несколько программируемых устройств таких, как процессор, компьютер, программируемую пользователем вентильную матрицу или программируемый логический контроллер (PLC). В качестве альтернативы или дополнения, контроллер 26 может содержать один или несколько непрограммируемых элементов управления, таких как хронирующая, или пневматическая, или электрическая схема, способная осуществлять последовательность операций. Контроллер 26 может воспринимать электронные сигналы от пользовательского интерфейса (не показан). Пользовательский интерфейс может включать в себя переключатель, кнопку, сенсорный экран, рычаг и тому подобное. Пользователь может активировать пользовательский интерфейс с возможностью посылки команды полного открывания на контроллер 26. На основании получения команды полного открывания с пользовательского интерфейса, контроллер 26 посылает команду полного открывания на двигатель 12. На основании получения команды полного открывания контроллера, двигатель 12 вращается и заставляет вторую зубчатую передачу 15 передавать крутящий момент через первую зубчатую передачу 13 на втулку 9 привода и открывает задний откидной борт 2. Если требуется, пользовательский интерфейс может быть масштабируемым, или пропорциональным, что позволяет пользователю посылать команду пропорционального открывания на контроллер 26. На основании получения команды пропорционального открывания, контроллер 26 посылает команду контроллера пропорционального открывания на двигатель 12, который заставляет задний откидной борт 2 перемещаться в какой-либо степени между закрытым положением и открытым положением. Пользовательский интерфейс также может быть активирован с возможностью генерации закрытых команд закрывания или команд пропорционального закрывания, которые приводят к вращению двигателя 12 в противоположном направлении и, либо к полному, либо частичному закрыванию заднего откидного борта 2.
Пользовательский интерфейс может быть размещен в разных местах, в том числе, во внутреннем пространстве пикапа, внутри кузова 1 пикапа, на заднем откидном борту 2 и в любом другом удобном месте. Электронное соединение 28 также может обеспечивать путь прохождения сигнала с наружной стороны заднего откидного борта 2 к контроллеру 26 для переноса электронных сигналов от пользовательского интерфейса на устройство 11 управления. Например, электронное соединение 28 может проводить команды от пользовательского интерфейса к контроллеру 26, в том числе команды на устройство 11 управления и команды для высвобождения фиксатора заднего откидного борта (не показан) для открывания заднего откидного борта 2. Если требуется, и в комбинации с другими местоположениями, пользовательский интерфейс также может быть устройством с дистанционным управлением таким, как брелок с использованием электронных ключей и тому подобное. Предпочтительно, что для достижения безопасности, команды закрывания и команды пропорционального закрывания могут генерироваться только с пользовательского интерфейса в непосредственной близости к заднему откидному борту 2, например, на заднем откидном борту 2.
Если требуется, антизажимные средства также могут включать в себя, например, ультразвуковые датчики, датчики инфракрасного излучения, емкостные датчики, антизажимные полоски и тому подобное. Если антизажимное средство зацеплено, например, если какой-либо объект попал между краем заднего откидного борта 2 и кузовом 1 пикапа, антизажимное средство пошлет команду остановки зажима на контроллер 28. На основании получения команды остановки зажима, контроллер 28 пошлет команду остановки зажима на двигатель 12 для остановки двигателя 12. Если требуется, двигатель 12 также будет менять направление вращения на основании получения команды контроллера для остановки.
Если требуется, может быть предусмотрен промежуточный переключатель в электронном соединении 28 или между электронным соединением 28 и устройством 11 управления. Промежуточный переключатель электропитания активируется по сигналам открывания и закрывания с контроллера 26. Активация промежуточного переключателя электропитания управляет подачей электропитания, либо напряжение либо силу тока, или одно из них, на устройство 11 управления. Контроллер 26 может посылать сигналы открывания и закрывания на промежуточный переключатель на разных частотах и с разными продолжительностями. Например, контроллер 26 может использовать технику широтноимпульсной модуляции для выполнения рабочего цикла и снижения потерь мощности, при этом обеспечивая регулируемую подачу электропитания на устройство 11 управления.
В другой опции, двигатель 12 также может включать в себя счетчик оборотов, такой как энкодер или резольвер. Когда контроллер 26 получает команду полного открывания или закрывания, контроллер генерирует команду контроллера полного открывания или закрывания, что обеспечивает управление двигателя 12 с возможностью вращения на заранее заданное число раз для перемещения заднего откидного борта 2 в пределах желаемого диапазона перемещения. На основании получения команды контроллера полного открывания или закрывания, двигатель 12 будет поворачиваться до тех пор, пока заранее заданное число оборотов не будет детектировано счетчиком оборотов. Когда контроллер 26 получает команду пропорционального открывания или пропорционального закрывания, контроллер 26 может сравнить пропорциональную команду с заранее заданным графиком числа оборотов двигателя, которое перемещает задний откидной борт 2 в положение, запрошенное пользователем. Контроллер 26 выбирает число оборотов двигателя и посылает команду контроллера пропорционального открывания или закрывания на двигатель 12, основанную на выбранном числе оборотов двигателя. На основании получения команды контроллера пропорционального открывания или закрывания, двигатель 12 поворачивается до тех пор, пока выбранное число оборотов двигателя не будет детектировано счетчиком оборотов.
В другом варианте, контроллер 26 может также включать в себя датчик электрического тока (не показан) с тем, чтобы если потребление тока двигателя 12 превышает ожидаемое потребление тока, датчик тока будет посылать сигнал блокирования на контроллер 26, который в свою очередь будет посылать сигнал контроллера для блокирования на двигатель 12 для остановки и изменения направления вращения. Например, превышение тока может возникать, когда перемещение заднего откидного борта 2 затрудняется из-за помехи.
В одном варианте, устройство 11 управления также содержит устройство 14 для сцепления. Устройство 14 для сцепления размещено между первой и второй зубчатыми передачами 13, 15. Устройство 14 для сцепления присоединено ко второй зубчатой передаче 15, которая действует как ведущая шестерня. Устройство 14 для сцепления может зацеплять первую зубчатую передачу 13 при перемещении между зацепленным положением и расцепленным положением. Когда устройство 14 для сцепления находится в зацепленном положении, первая зубчатая передача 13 соединена, и может приводиться в действие, с помощью второй зубчатой передачи 15. Когда устройство 14 для сцепления находится в зацепленном положении, первая зубчатая передача 13 может называться ведущей шестерней. Когда устройство 14 для сцепления находится в расцепленном положении, первая зубчатая передача 13 не приводится во вращение второй зубчатой передачей 15. Устройство 14 для сцепления может перемещаться между зацепленным и расцепленным положениями, на сновании электрического сигнала от контроллера 26. В качестве альтернативы, устройство 14 для сцепления может перемещаться между зацепленным и расцепленным положениями с помощью механического, пневматического или гидравлического средства. При нахождении в зацепленном положении, устройство 14 для сцепления зацепляет первую зубчатую передачу 13 посредством трения или соответствия форме и соединяет первую и вторую зубчатые передачи 13, 15.
Пример согласно фиг. 6 изображает альтернативное устройство 100 управления. Устройство 100 управления имеет подобные признаки с устройством 11 управления, описанным выше, за исключением того, что двигатель 12 и вторая зубчатая передача 15 заменены тормозным устройством 130. Кроме того, устройство 114 для сцепления размещено между тормозным устройством 130 и первой зубчатой передачей 113. Устройство 114 для сцепления присоединено к первой зубчатой передаче 113. Устройство 114 для сцепления может зацеплять тормозное устройство 130 при перемещении между зацепленным положением и расцепленным положением. Когда устройство 114 для сцепления находится в зацепленном положении, вращение первой зубчатой передачи 113 замедляется и останавливается при помощи тормозного устройства 130. При нахождении в зацепленном положении, устройство 114 для сцепления зацепляет тормозное устройство 130 посредством трения или соответствия форме. Когда устройство 114 для сцепления находится в расцепленном положении, первая зубчатая передача 113 может свободно вращаться, например, при ручном управлении заднего откидного борта 2.
Устройство 100 управления также может содержать датчик 127 угловых перемещений. Датчик 127 угловых перемещений может быть размещен в устройстве 114 для сцепления или в первой зубчатой передаче 113. Датчик 127 угловых перемещений детектирует изменения в угловом перемещении, при этом первая зубчатая передача 13 находится во вращении. Например, датчик 127 угловых перемещений может представлять собой датчик вращения, скорости, ускорения и/или положения. Например, при открывании или закрывании заднего откидного борта 2, датчик 127 угловых перемещений детектирует угловую скорость первой зубчатой передачи 113 по мере того, как она перемещается и генерирует сигнал угловой скорости, который посылается на контроллер 126. Контроллер 126 может быть подобен контроллеру 26, описанному выше, или не подобен. Контроллер 126 получает сигнал угловой скорости и сравнивает этот сигнал с заранее заданной величиной угловой скорости. Если имеет место разница между сигналом угловой скорости и заранее заданной величиной угловой скорости, генерируется сигнал ошибки по скорости. Если сигнал угловой скорости является больше, чем заранее заданная величина скорости, контроллер 126 посылает команду контроллера для зацепления на устройство 114 для сцепления. Когда устройство 114 для сцепления получает команду контроллера для зацепления, оно перемещается в зацепленное положение и соединяет тормозное устройство 130 с первой зубчатой передачей 113 для замедления или остановки вращения первой зубчатой передачи 113.
Если требуется, контроллер 126 может посылать команду контроллера для пропорционального зацепления, основанную на амплитуде сигнала ошибки по скорости. На основании получения команды контроллера для пропорционального зацепления, устройство 114 для сцепления может перемещаться в промежуточное зацепленное положение и замедлять скорость вращения первой зубчатой передачи 113 на желательную величину.
В качестве другой опции, если задний откидной борт 2 перемещается и сталкивается с помехой, датчик 127 угловых перемещений может детектировать внезапное торможение скорости вращения первой зубчатой передачи 113. Когда датчик 127 угловых перемещений детектирует внезапное торможение, сигнал тормоза генерируется датчиком 127 угловых перемещений и посылается на контроллер 126. Когда контроллер 126 получает сигнал тормоза, он генерирует команду контроллера для зацепления, которая посылается на устройство 114 для сцепления. Когда устройство 114 для сцепления получает команду контроллера для зацепления, устройство 114 для сцепления перемещается в зацепленное положение и тормозное устройство 130 соединяется с первой зубчатой передачей 113.
Возможно, когда тормозное устройство 130 соединяется с первой зубчатой передачей 113, может возникать перемещение первой зубчатой передачи 113, но предпочтительно только в направлении, которое противоположно направлению, в котором первая зубчатая передача 113 перемещалась до того, как был генерирован сигнал тормоза датчиком 127 угловых перемещений. Если сигнал тормоза был послан на контроллер 126 и датчик 127 угловых перемещений детектировал перемещение заднего откидного борта 2 в противоположном направлении, датчик 127 угловых перемещений генерирует сигнал высвобождения и посылает этот сигнал высвобождения на контроллер 126. На основании получения сигнала высвобождения, контроллер 126 генерирует и посылает сигнал контроллера для отсоединения зацепления на устройство 114 для сцепления. Когда устройство 114 для сцепления получает сигнал контроллера для отсоединения зацепления, устройство 114 для сцепления перемещается в отсоединенное положение и первая зубчатая передача больше не соединена с тормозным устройством 130.
Если требуется, устройство 114 для сцепления может перемещаться между зацепленным и отцепленным положениями по электронному сигналу, полученному непосредственно с датчика 127 угловых перемещений.
В качестве другой опции устройства 11 управления и устройство 100 управления, может быть встроен поворотный амортизатор 250 для ограничения или контроля скорости, с которой открывается задний откидной борт 2. Фиг. 7 изображает один пример поворотного амортизатора 250, который размещен внутри гнезда для первой зубчатой передачи 13 и присоединен к первой зубчатой передаче 13 устройства 11 управления. По желанию, поворотный амортизатор 250 может быть присоединен к первой зубчатой передаче 13, будучи размещенный внутри гнезда. Хотя не показано на чертежах, поворотный амортизатор 250 подобным образом может быть размещен и соединен с первой зубчатой передачей 113 устройства 100 управления. Например, когда устройство 14, 114 для сцепления находится в зацепленном положении, задний откидной борт 2 может быть открыт вручную. Поворотный амортизатор 250 присоединен к первой зубчатой передаче 13, 113 для ограничения скорости, с которой перемешается задний откидной борт 2, когда он открывается вручную. Поворотный амортизатор 250 может быть непосредственно соединен с одной или несколькими зубчатыми шестернями первой зубчатой передачи 13, 113. Если требуется, поворотный амортизатор 250 может быть косвенно соединен с первой зубчатой передачей 13, 113, например, посредством реечной или сателлитной передачи или любой другой подходящей передачи. Поворотный амортизатор 250 может ограничивать скорость открывания заднего откидного борта 2 на протяжении всего пути поворота заднего откидного борта 2 между полностью открытым и полностью закрытым положениями, или на протяжении только отрезка пути поворота заднего откидного борта 2. В одной опции поворотного амортизатора 250, поворотный амортизатор 250 может содержать внешний фиксированный элемент и внутренний ротор, который поворачивает внешний фиксированный элемент. Внутренний ротор соединен, или прямо или косвенно, с одной или несколькими шестернями первого узла зубчатой передачи 13, 113. Скорость, с которой внутренний ротор вращается внутри внешнего фиксированного элемента, может быть ограничена посредством текучей среды, которая находится внутри внешнего фиксированного элемента. Например, текучая среда может находиться в пространстве между внешним фиксированным элементом и внутренним ротором. Вязкость текучей среды и калиброванное отверстие амортизатора могут определять скорость, с которой вращается внутренний ротор. По желанию, текучая среда может содержать силикон. В качестве альтернативы, могут быть использованы другие типы поворотного амортизатора 250 такие, как демпферы на основе трения и демпферы на основе сдвига текучей среды. Ограничение скорости, с которой вращается внутренний ротор, будет ограничивать скорость вращения первого узла зубчатой передачи 13, 113, что, в свою очередь, будет ограничивать скорость заднего откидного борта 2, когда он открывается вручную.
Как показано в примере согласно фиг. 8, задний откидной борт 2 может быть удален из кузова 1 пикапа. Поворачивание заднего откидного борта 2 до заранее заданного угла высвобождения (показан как угол α на фиг. 7) относительно продольной оси кузова 1 пикапа (указана линией Y на фиг. 7), позволяет приводному рычагу 10 высвобождаться из втулки 9 привода. Путем прикладывания тянущего усилия вдоль заранее заданного угла α высвобождения (см. линия Z на фиг. 7), например, ручного тянущего усилия, приводной рычаг 10 проходит через открытую сторону 25. Например, втулка 9 привода может поворачиваться внутри невращающегося наружного кольца 24' с отверстием, которое выровнено в соответствии с заранее заданным углом высвобождения (см. фиг. 4В). Когда втулка 9 привода поворачивается до углового положения, отличного от заранее заданного угла высвобождения, наружное кольцо 24' предохраняет охватываемый участок 6 от прохождения через отверстие в наружном кольце 24'. Когда втулка 9 привода поворачивается на заранее заданный угол, охватываемый участок 6 может проходить через отверстие в наружном кольце 24' и охватываемый участок 6 высвобождается. Когда охватываемый участок 6 высвобождается, задний откидной борт 2 может быть смещен вбок параллельно оси вращения (показана как линия Х) для высвобождения кругового рычага 29 из кольцевой втулки 23, и таким образом высвобождения заднего откидного борта 2 из кузова 1 пикапа. Электрическое соединение 28 может быть отсоединено или перед или после высвобождения приводного рычага 10 из втулки 9 привода.
Это письменное описание использует примеры для раскрытия настоящего изобретения, включающего в себя наилучший вариант осуществления, а также для обеспечения возможности любому специалисту в данной области применить на практике настоящее изобретение, в том числе изготовление и использование любых устройств или систем, и исполнение любых внедренных способов. Патентоспособный объем настоящего изобретения определен формулой изобретения, и может включать в себя другие примеры, которые понятны для специалистов в данной области техники.
Реферат
Группа изобретений относится к области транспортного машиностроения. По первому варианту, устройство управления для заднего откидного борта транспортного устройства содержит первую зубчатую передачу, гнездо привода, присоединенное к первой зубчатой передаче, двигатель, вторую зубчатую передачу, присоединенную к двигателю, и устройство для сцепления, присоединенное ко второй зубчатой передаче. Устройство для сцепления выполнено с возможностью перемещения между зацепленным и расцепленным положениями. В зацепленном положении устройство для сцепления соединяет зубчатые передачи друг с другом. Устройство управления установлено в заднем откидном борту. По второму варианту, устройство управления содержит гнездо привода, присоединенное с возможностью съема к кузову грузового транспортного средства, и тормозное устройство. В зацепленном положении устройство для сцепления соединяет зубчатую передачу с тормозным устройством. Задний откидной борт транспортного средства содержит камеру для вмещения упомянутого устройства управления. Достигается улучшение управлением задним откидным бортом. 3 н. и 8 з.п. ф-лы, 10 ил.
Комментарии