Способ и устройство для автоматических систем, разработанных для приведения в действие подвижных заграждений - RU2344259C1
Код документа: RU2344259C1
Чертежи






Описание
Настоящее изобретение относится к способу и управляющему устройству для автоматических систем, разработанных для приведения в действие подвижных заграждений, в частности дверей, ставней и ворот.
Для выполнения существующих правил безопасности для электрических и электронных систем, разработанных для приведения в действие и управления подвижными заграждениями, такими как ворота, двери и автоматические ставни, широко используются некоторые типы защитных устройств. Упомянутые защитные устройства, как правило, состоят из инфракрасных фотоэлементов и чувствительных кромок (активных воспринимающих давление компонентов), которые являются типовыми, так как они приводят к низкой производственной себестоимости и низкой стоимости при реализации, и также обеспечивают необходимый уровень безопасности, требуемый в соответствии с нормами. В частности, эти устройства должны гарантировать прекращение работы настолько быстро, насколько возможно, и немедленный обратный ход по траектории движения подвижного заграждения в случае, когда объект, человек или животное преграждает его нормальную траекторию или происходит столкновение.
Для этой цели автоматические системы для подвижных заграждений оборудованы по меньшей мере двумя парами фотоэлементов (одна на высоте 50 см от земли, а другая на высоте 100 см) на каждой стороне прохода, и по меньшей мере одной чувствительной кромкой. Так как чувствительная кромка должна крепиться к концу подвижного заграждения, которое достигает фиксированной точки конца движения, требуется обеспечить сложные и дорогостоящие средства для соединения вместе чувствительной кромки и электрической и электронной системы.
Соединительные средства согласно современному состоянию технологии, бывают раздвижного или скользящего типов, которые закреплены непосредственно на внутренней стороне подвижного заграждения и проходят по всей длине упомянутого заграждения перед тем, как соединиться с электрической и электронной системой.
Типичное управляющее устройство 100 для ворот, формирующее часть современного уровня техники, показано на фиг.1. Оно по существу состоит из электродвигателя 102 для приведения в действие заграждения 103, блока управления (не показан, обычно встроен внутри двигателя), который управляет и программирует движения ворот 103, средства 105 для управления открытием или закрытием ворот 103 (удаленные дистанционные устройства, управляемые клавишами переключатели, клавиатуры и т.п.), датчиков и (или) предупреждающих устройств, обеспечивающих безопасность системы (фотоэлементы 107, чувствительные кромки 108, 208 и вспыхивающая лампа 109), а также необходимых электрических и электронных средств (разъемы, кабели, и т.д.).
Фотоэлементы 107 состоят из по меньшей мере одной пары для каждого прохода/стороны заграждения 103 (одна пара на внутренней стороне и одна пара на наружной стороне) и расположены настолько близко, насколько возможно к перемещающемуся заграждению 103, чтобы предотвратить образование зон доступа, которые не контролируются, и, следовательно, не безопасны. Две чувствительных кромки 108 располагаются на конце заграждения 103 и на поверхности фиксированного тела 119 (такого как опорный столб, см. фиг.1), чтобы предотвратить случайное разрушение или столкновения.
Известное решение предусматривается как соединение с электрической/электронной системой для чувствительной кромки, прикрепленной к одному концу скользящего заграждения, свернутый спиралью (типа пружины) растягивающийся кабель, концы которого соответственно соединены с чувствительной кромкой и с электрической/электронной системой. Свернутый спиралью кабель размещается внутри направляющей трубы, прикрепленной непосредственно на внутреннюю сторону подвижного заграждения.
Другое известное решение предусматривается как контейнерная труба, вмещающая внутри себя кабель и скользящую удерживающую кабель цепь (подобно гусеничному элементу), имеющую ту же самую функцию, что и свернутый спиралью кабель, описанный выше. Концы кабеля соединяются соответственно с чувствительной кромкой и с электрической/электронной системой.
Все эти соединительные средства должны быть разработаны модульными, чтобы подходить к каждому типу подвижного заграждения. Изготовление, управление и сборка упомянутых соединительных средств сложна и дорога. Более того, их трудно производить с эстетически приятной формой.
Третье известное решение состоит из управляющего устройства для скользящих заграждений, состоящего из передатчика и приемника, которые используются как средства для передачи состояния чувствительной кромки. Передатчик закреплен на скользящем заграждении ворот и, так же как чувствительная кромка, работает на батареях. Приемник прикреплен к скользящей части ворот (столбу, стенке, и т.п.) и запитывается от сети. Передатчик, который непосредственно соединен с чувствительной кромкой, передает постоянный и непрерывный сигнал (последовательность импульсов) на приемник в течение всех движений и всех пауз при открытии или закрытии заграждения (непрерывная передача). Непрерывный сигнал интерпретируется управляющим блоком как индикация того, что не имеется никаких проблем и (или) помех. В случае давления на чувствительную кромку передатчик прерывает передачу непрерывного сигнала на приемник и управляющий блок интерпретирует это прерывание в сигнале как аварийное состояние, вызывающее немедленную остановку и обратный ход в движении подвижного заграждения.
Очевидно, что эффективность этого устройства зависит от продолжительности работы батарей, запитывающих первый фотоэлемент. Фактически:
- управляющее устройство, и в частности передатчик, характеризуется высоким потреблением, так как он должен передавать непрерывный сигнал, чтобы избежать времен простоя, которые могут привести к остановке системы;
- технология, используемая в производстве стандартных батарей, не гарантирует минимальный рабочий период системы в несколько месяцев, если только не будут использоваться батареи большого размера, с последующей проблемой, где их разместить;
- устройство не предупреждает пользователя, когда уровень заряда батареи низкий, так что их следует менять в должное время;
- передатчик способен кодировать единственный тип сообщения (одну часть информации) с риском того, что приемнику может создаваться помеха сигналом, подобным испускаемому передатчиком (например другим передатчиком, расположенным неправильно). Это состояние может привести к предположению в устройстве условия «небезопасно», так как возможное сообщение об опасности может быть неправильно интерпретировано или вовсе быть не обнаруженным.
Цель настоящего изобретения состоит в предоставлении защитного устройство для автоматических систем, разработанных для движения подвижных заграждений, которое устраняет недостатки современного уровня техники.
Эта цель достигается способом согласно изобретению в соответствии с приведенной ниже формулой изобретения и связанными с ним устройствами для его реализации. Упомянутый способ для управления скользящим заграждением во время движений закрытия и открытия, чтобы предотвратить опасное столкновение с препятствием или его разрушение вследствие того, когда закрывающаяся кромка заграждения имеет расположенные вдоль нее один или несколько датчиков, соединенных с первым приемопередатчиком, способным обмениваться сигналом со вторым фиксированным приемопередатчиком, находящимся в связи с рабочим блоком, который управляет движением заграждения, содержит этап определения для упомянутого сигнала протокола связи, состоящего из более чем двух сигнальных конфигураций.
Управляющее устройство для подвижных заграждений согласно способу по изобретению допускает передачу различных сигналов, включающих в себя протокол передачи, состоящий из более двух сигнальных конфигураций, имеющих различные кодированные значения. Состояние датчика (например, чувствительной кромки), который прикреплен к подвижному заграждению, передается в управляющий и приводящий в движение блок без необходимости применять сложные и дорогостоящие кабельные соединения.
Преимущества изобретения будут очевидны из нижеследующего описания предпочтительного варианта осуществления изобретения, представленного исключительно неограничивающим примером ворот со скользящим заграждением, со ссылкой на сопровождающие чертежи, на которых:
Фиг.1 показывает устройство согласно современному уровню техники для управления подвижным заграждением;
Фиг.2 показывает устройство для управления подвижным заграждением согласно настоящему изобретению;
Фиг.3 показывает структурную схему приемного фотоэлемента;
Фиг.4 показывает структурную схему передающего фотоэлемента;
Фигуры 5, 6, 7, 8, 9 и 10 показывают сигнальные конфигурации.
На фиг.2 (ссылочные позиции такие же, как на фиг.1, указывают на подобные части) показано управляющее устройство 21 согласно данному изобретению, содержащее пару фотоэлементов 27а, b. Первый фотоэлемент 27а представляет собой приемный фотоэлемент и расположен поблизости от конечного пункта 29 перемещения заграждения 103; второй фотоэлемент 27b представляет собой передающий фотоэлемент и расположен на конце заграждения 103 вблизи чувствительной кромки 108 и соединен с ней с помощью традиционных электрических и электронных средств (не показаны). Другая чувствительная кромка 208 расположена в конечном пункте 29 перемещения и управляется известным способом с помощью блока (не показан), управляющего заграждением 103.
Фотоэлемент 27b (см. фиг.4) по существу состоит из беспроводных средств 41 для передачи (предпочтительно инфракрасных) импульсов и связанных задающих каскадов 41, управляемых микроконтроллерным блоком 42, который также обрабатывает информацию, посланную:
- вибрационным датчиком 43 движения известного типа, который определяет «состояние» заграждения 103 (закрыто или в движении);
- двумя компараторами 49а, b, которые выполнены как строб-дискриминаторы между двумя эталонными напряжениями V1 и V2, используемыми как пороговые значения, и которые сравнивают выходной сигнал (напряжение) чувствительной кромки 108 с упомянутыми опорными напряжениями. Чувствительная кромка 108 используется для обнаружения отсутствие препятствий или опасности, вызванных препятствиями, вошедшими в соприкосновение с чувствительной кромкой 108;
- компаратором 49с, который сравнивает напряжение питающей батареи 46 известного типа с эталонным напряжением Vref; таким образом, микроконтроллер 42 способен непрерывно контролировать уровень заряда батареи 46.
Фотоэлемент 27а (см. фиг.3) по существу состоит из приемного блока 31, который принимает и предварительно усиливает импульсы, принятые от передающего фотоэлемента 27b, из усилителя 32, который далее усиливает эти импульсы, из устройства 33 формирования прямоугольных импульсов, из микроконтроллера 34, который интерпретирует принятый сигнал и обменивается управляющими сигналами с управляющим блоком через общий соединительный выход 35 (известного типа), с дисплейным компонентом 36, способным отображать состояние или экстренные сообщения, и с конфигурирующими компонентами 37 известного типа, способными определять идеальную комбинацию согласно конкретным требованиям пользователя или различных приложений. Выходные сигналы усилителя 32 делаются прямоугольными импульсами устройством 33 формирования прямоугольных импульсов и посылаются к цифровому входу микроконтроллера 34. Посредством этого входа микроконтроллер 34 способен обнаружить интервалы времени, которые проходят между одним импульсом и следующим.
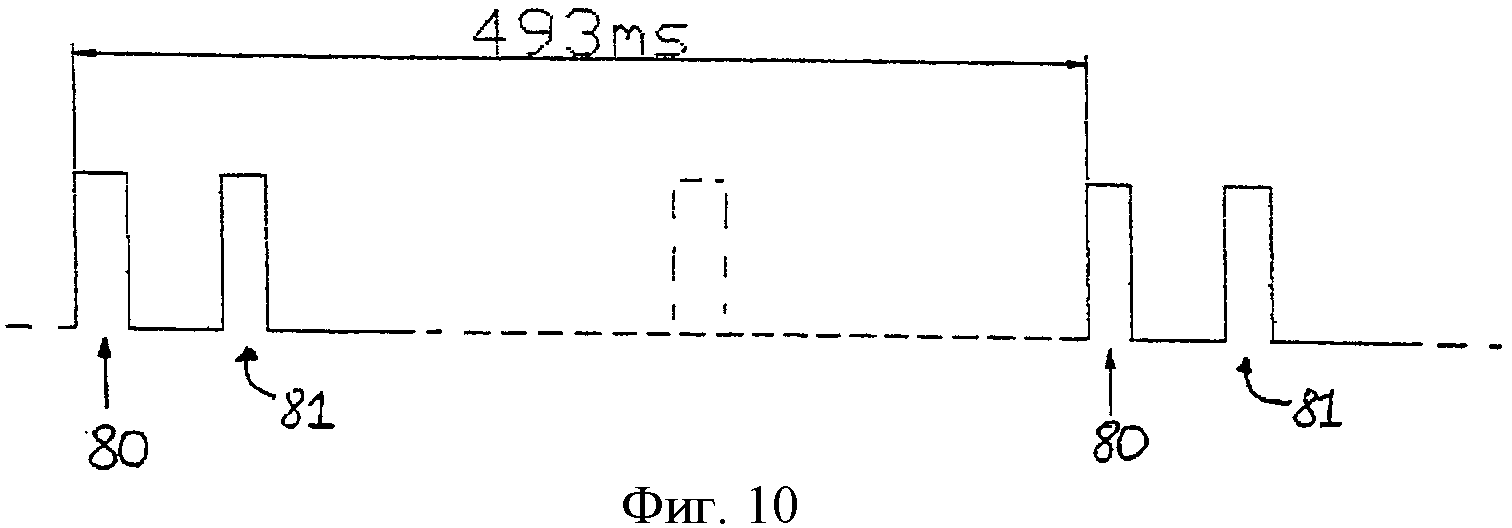
Работа управляющего устройства 21 характеризуется протоколом передачи между двумя фотоэлементами 27а, b, который имеет сигнальные конфигурации (кадры), повторяющиеся с переменным периодом в зависимости от того, находится ли устройство в «быстром» режиме (например, с периодом = 14,5 мс) или в «медленном» режиме (например, с периодом = 463 мс). Эти предпочтительные сигнальные конфигурации видны на фиг.5-10.
Переключение между «быстрым» режимом и «медленным» режимом регулируется состоянием датчика 43 движения, который позволяет получить два особенно новаторских признака:
- посредством микроконтроллера 42 передающего фотоэлемента 27b кадры с медленным повторением («медленный» режим), когда заграждение 103 неподвижно, и с быстрым повторением («быстрый» режим), когда заграждение 103 перемещается, посылаются к приемному фотоэлементу 27а; поэтому между передающим фотоэлементом 27b и приемным фотоэлементом 27а поддерживается постоянная связь независимо от состояния движения заграждения 103; с точки зрения безопасности управляющее устройство 21 заграждения 103 чрезвычайно надежно;
- обнаружение состояния движения заграждения 103 посредством датчика 43 движения приводит к увеличению продолжительности работы батареи 46, которая в случае коммерческих батарей может доходить до 10 лет; фактически при переключении на «медленный» режим, когда заграждение 103 неподвижно, а именно на более медленную частоту передачи передающего фотоэлемента 27b, потребление энергии батареей значительно уменьшается, в то же время увеличивая срок службы батареи 46.
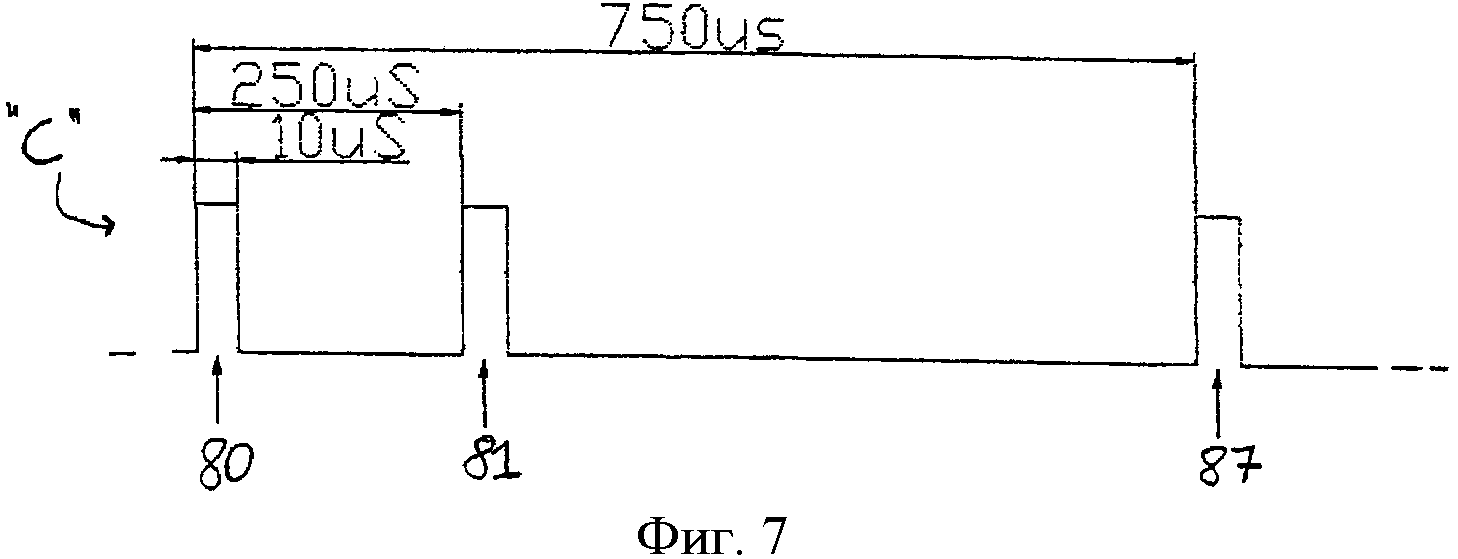
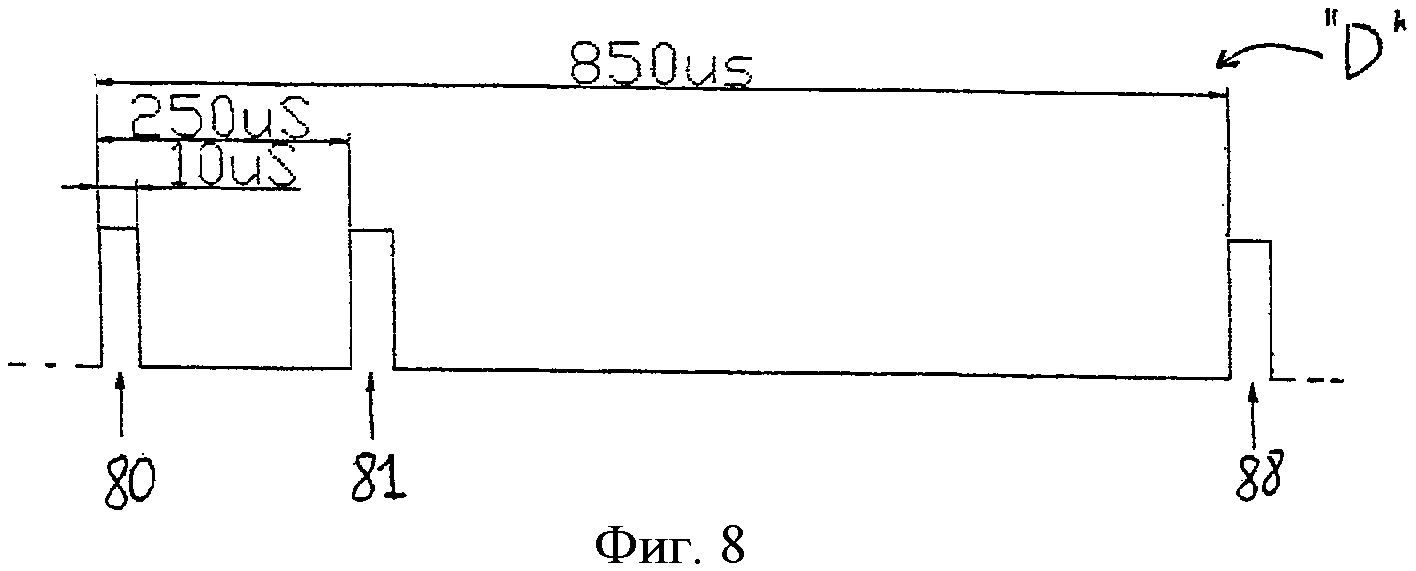
Сигнальные конфигурации составлены следующим образом:
- два начальных бита 80, 81, например, с длительностью 10 мкс и интервалом 250 мкс, которые позволяют приемному фотоэлементу 27а, в частности микроконтроллеру 34, синхронизироваться с началом передаваемого кадра;
- бит 85, например, с длительностью 10 мкс и интервалом 550 мкс от бита 80, который сигнализирует, когда чувствительная кромка находится в неактивированном состоянии, т.е. когда не имеется никакого препятствия (см. фиг.5);
- бит 86, например, с длительностью 10 мкс и интервалом 650 мкс от бита 80, который сигнализирует, когда чувствительная кромка находится в активном состоянии, т.е. когда имеется контакт с препятствием (см. фиг.6);
- бит 87, например, с длительностью 10 мкс и интервалом 750 мкс от бита 80 для сигнализации приемному фотоэлементу 27а о переключении на «медленный» режим (см. фиг.7);
- бит 88, например, с длительностью 10 мкс и интервалом 850 мкс от бита 80, который сигнализирует, когда мощность батареи 46 низка (см. фиг.8).
Биты 85, 86, 87, 88 передаются, только когда встречается связанное с ними событие. Поэтому имеется всего четыре различных сигнала, которые могут передаваться, однако, с различным периодом в зависимости от «медленного» или «быстрого» режима передачи. Ради простоты описания сигналы, показанные на фиг.5-8, определены как сигналы типа А, В, С и D соответственно.
Конкретный признак связи, состоящий из сигнала, который повторяется с не постоянными, но известными интервалами, позволяет приемному фотоэлементу 27а распознавать сигнал передающего фотоэлемента 27b, даже когда присутствуют мешающие сигналы. Приемный фотоэлемент 27а имеет основной признак повторения по сути дела точных временных интервалов, с которыми передающий фотоэлемент 27b посылает кадры. Другими словами, приемный фотоэлемент 27а запирается для передающего фотоэлемента 27b. Когда приемный фотоэлемент 27а не заперт, он остается в режиме ожидания до тех пор, пока он не распознает временные комбинации сигналов передающего фотоэлемента 27b, а затем начинает повторять точную последовательность передачи. Таким образом, приемный фотоэлемент 27а рассматривает как достоверные те кадры, которые воспроизводят последовательность (с подходящим допустимым изменением), и рассматривает как недостоверные те кадры, которые находятся вне последовательности. Если недостоверные кадры являются достаточно случайными событиями, тогда они будут просто игнорироваться; в противном же случае приемный фотоэлемент 27а преимущественно установит устройство 21 на максимальное условие безопасности (заблокированная система).
В случае необходимости возможно использовать дальнейшие способы исключения повреждений, например, посредством изменения периода, который характеризует «медленный» режим и (или) «быстрый» режим, изменяя его немного между одним кадром и следующим. Например, для «медленного» режима последовательность периодов передачи может циклически быть 493 мс, 494 мс, 495 мс, 493 мс, 494 мс, 495 мс и так далее.
Управляющее устройство 21 функционирует следующим образом во время различных фаз работы:
- Состояние заграждения 103 закрыто или открыто, но стационарно. Микроконтроллер 42 обрабатывает сигнал от датчика 43 движения и чувствительной кромки 108. Будучи в полностью безопасном состоянии, он посылает приемному фотоэлементу 27а сигнал типа А в «медленном» режиме;
- Открытие или закрытие заграждения 103. Вслед за командой закрытия или открытия, посланной в управляющий блок, электродвигатель 102 начинает перемещать заграждение 103, движение которого немедленно возбуждает датчик 43 движения, который в свою очередь посылает сигнал «движения» блоку 42. Последний переходит в «быстрый» режим и снова посылает приемному фотоэлементу 27а через средство передачи 41 сигнал типа А. Сигнал типа А в «быстром» режиме указывает состояние перемещения заграждения 103. В то же самое время управляющий блок активирует вспыхивающую лампу 109, которая сигнализирует движение, используя известную процедуру. В конце движения заграждения 103 блок 42 обнаруживает отсутствие сигнала от датчика 43 движения и отсутствие сигнала из чувствительной кромки 108, а следовательно, заграждение 103 закрыто или открыто, но в любом случае стационарно. После заранее заданного короткого периода, когда не имеется никакого движения заграждения 103, при непрерывной передаче сигнала типа А в «быстром» режиме блок 42 решает переключаться в «медленный» режим передачи и сообщает об этом приемному фотоэлементу 27а, посылая сигнал типа С.
Упомянутое «медленное» состояние передачи, в котором посылается сигнал типа А, длится до тех пор, пока новый сигнал движения не будет принят от датчика 43 движения.
- Обнаружение опасности. Во время движения заграждения 103, а следовательно, пока фотоэлемент 27b передает сигнал типа А в «быстром» режиме, может случиться, что чувствительная кромка 108 обнаруживает препятствие. Блок 42 обнаруживает изменение в «состоянии» чувствительной кромки 108 посредством компараторов 49а, b, и посылает сигнал опасности приемному фотоэлементу 27а с помощью сигнальной конфигурации типа В в «быстром» режиме. Микроконтроллер 34 принимает этот сигнал и командует управляющему блоку немедленно остановиться и изменить направление движения заграждения 103.
Очевидно, пара фотоэлементов 27а и 27b в дополнение к передаче описанных выше сигналов функционируют со способами согласно уровню техники, а именно, если объект, человек или животное проходит через их луч, подвижное заграждение 103 останавливается и двигается в обратном направлении. Фактически приемный фотоэлемент 27а распознает отсутствие сигнала от передающего фотоэлемента 27b как указание присутствия препятствия.
- Контроль батареи 46. Несмотря на потребление малой мощности батарей, достигаемое в результате «медленного» режима передачи, предусматривается обеспечение сигнальной конфигурации, в особенности сигнала типа D, который передается передающим фотоэлементом 27b фотоэлементу 27а и сигнализирует о том, что заряд батареи 46 очень низкий. В этом случае микроконтроллер 34 активирует дисплейное средство 36, чтобы отобразить состояние батареи 46 (вспыхивающая лампочка, сигнальный светодиод и т.д.) и предупредить пользователя.
Также ясно, что во время работы управляющего устройства 21 возможно использовать один или несколько фотоэлементов 107, образующих часть известной технологии, независимо от работы изобретения.
Изобретение обеспечивает эквивалент рабочей автономии для средней продолжительности работы, рассчитанной для всех компонентов, которые формируют управляющее устройство 21, без необходимости в непрерывной замене батарей 46. Таким образом избегают ненужных затрат для сборки неудобных и дорогостоящих принадлежностей, требующих вмешательства специализированного персонала.
Изобретение может быть подвергнуто множеству изменений. Например, передача между фотоэлементами 27а, b может проходить по радио или какой-либо иной беспроводной системе. Вместо чувствительной кромки 43 и (или) вместе с ней возможно использовать другие типы датчиков (близостные датчики, ультразвуковые датчики и т.д.). Микроконтроллеры 34, 42 могут быть заменены любым блоком обработки данных или подходящей схемой, в то время как фотоэлементы 27а, b могут оба быть снабжены приемопередатчиками, чтобы получить двустороннюю передачу данных. Это может быть полезно, например, в случае, когда заграждение 103 имеет, как уже упомянуто, другие датчики или устройства в дополнение к чувствительной кромке 43, и информация должна приниматься от фотоэлемента 27а после того, как к нему через фотоэлемент 27b посланы данные, например считывающие состояние замка заграждения 103, комбинации доступа и т.д. Кроме того, прикрепленный приемопередатчик может также располагаться далеко от заграждения 103, например в случае удаленного и централизованного управления многими подвижными заграждениями, и может использоваться, чтобы передавать управляющему блоку состояние датчиков, которые не расположены на заграждении 103.
Вместо батареи 46 возможно использовать, например, источник питания от солнечных элементов.
Датчик 43 движения может также не располагаться на закрывающем элементе заграждения 103, как в случае доплеровского датчика. Эти и другие варианты в любом случае включены в объем охраны нижеследующей формулы изобретения.
Реферат
Изобретение относится к области автоматики и могут быть использовано в автоматических системах для приведения в действие подвижных заграждений, например дверей, ставней и ворот. Техническим результатом является обеспечение защиты автоматических устройств. В способе и устройстве для управления движениями закрытия и открытия подвижного заграждения подвижное заграждение содержит закрывающий край с расположенным на нем одним или несколькими датчиками, соединенными с первым приемопередатчиком, способным обмениваться сигналом со вторым фиксированным приемопередатчиком, связанным с управляющим блоком, который управляет движением заграждения, при этом определяется протокола связи для упомянутого сигнала, состоящего из более чем двух сигнальных конфигураций (А, В, С, D). 2 н. и 32 з.п. ф-лы; 10 ил.

Комментарии