Электронный измеритель для двух или более измерительных узлов - RU2721312C2
Код документа: RU2721312C2
Чертежи


Описание
Область техники
Описанные ниже варианты реализации относятся к электронному измерителю и, в частности, к электронному измерителю для двух или более измерительных узлов.
Уровень техники
Вибрационные датчики, такие как, например, вибрационные денситометры и расходомеры Кориолиса, хорошо известны и используются для измерения массового расхода и для получения другой информации, относящейся к материалам, текущим через трубопровод в расходомере. Примерные расходомеры Кориолиса раскрыты в Патенте США 4,109,524, Патенте США 4,491,025, и Re. 31,450. Эти расходомеры имеют измерительные узлы с одним или более трубопроводами прямой или изогнутой конфигурации. Каждая конфигурация трубопроводов в массовом расходомере Кориолиса, например, имеет набор собственных колебательных мод, которые могут быть простыми изгибными модами, крутильными модами, или модами смешанного типа. В каждом трубопроводе могут возбуждаться колебания на предпочтительной моде. Когда поток через расходомер отсутствует, приложенная к трубопроводу(-ам) возбуждающая сила заставляет все точки вдоль трубопровода(-ов) колебаться с идентичной фазой, или с малым "смещением нуля", которое является временной задержкой, измеряемой при нулевом расходе.
Как только материал начинает течь через трубопровод(-ы), силы Кориолиса приводят к тому, что каждая точка вдоль трубопровода(-ов) имеет различную фазу. Например, фаза на впускном конце расходомера отстает от фазы в центральном положении возбуждения, тогда как фаза на выпуске опережает фазу в центральном положении возбуждения. Тензометрические датчики на трубопроводе(-ах) производят синусоидальные сигналы, отображающие движение трубопровода(-ов). Сигналы, выходящие от тензометрических датчиков, обрабатываются для определения временной задержки между тензометрическими датчиками. Временная задержка между двумя или более тензометрическими датчиками пропорциональна массовому расходу материала, текущего через трубопровод(-ы).
Электронный измеритель, соединенный с возбудителем, создает сигнал возбуждения для управления возбудителем и также для определения массового расхода и/или других свойств обрабатываемого материала из сигналов, принятых от тензометрических датчиков. Возбудитель может содержать одну из многих известных конструкций; однако, магнит и противостоящая индукционная катушка возбуждения наиболее успешно используются в производстве расходомеров. Переменный ток пропускается через индукционную катушку возбуждения, вызывая колебания трубопровода(-ов) с желаемой амплитудой и частотой колебаний трубопровода. В данной области техники также известно обеспечение тензометрических датчиков в виде конструкции магнита и индукционной катушки, весьма подобной конструкции возбудителя.
Многие системы используют два или более измерительных узлов вследствие различных ограничений конструкции. Например, измерительные узлы, используемые при распределении жидкого природного газа (LNG) по транспортным средствам перевозки сжиженных природных газов, могут использовать первый измерительный узел для измерения топлива, перекачиваемого из резервуара хранения LNG на транспортное средство для перевозки LNG. Второй измерительный узел может использоваться для измерения топлива, которое возвращается в резервуар для LNG. Топливо, возвращаемое в резервуар для LNG, может иметь отличающийся расход, температуру, состояние, и т.д. Однако, каждый измерительный узел имеет один электронный измеритель. Сокращение числа электронных измерителей может сократить затраты и снизить сложность систем, которые требуют два или более измерительных узла. Соответственно, имеется потребность в электронном измерителе для двух или более измерительных узлов.
Сущность изобретения
Обеспечен электронный измеритель для двух или более измерительных узлов. В соответствии с вариантом реализации, электронный измеритель содержит процессор и один или более сигнальных процессоров, соединенных с возможностью связи с процессором. Один или более сигнальных процессоров сконфигурированы для соединения с возможностью связи с первым измерительным узлом и вторым измерительным узлом.
Обеспечен способ управления двумя или более измерительными узлами. В соответствии с вариантом реализации, способ содержит обеспечение первого сигнала датчика, причем первый сигнал датчика обеспечивается первым измерительным узлом, обеспечение второго сигнала датчика, причем второй сигнал датчика обеспечивается вторым измерительным узлом, и прием первого сигнала датчика и второго сигнала датчика электронным измерителем.
Обеспечена система с электронным измерителем для двух или более измерительных узлов. В соответствии с вариантом реализации, система содержит первый измерительный узел, второй измерительный узел и электронный измеритель, соединенный с возможностью связи с первым измерительным узлом и вторым измерительным узлом.
Объекты
В соответствии с объектом, электронный измеритель (100) для двух или более измерительных узлов (10a, 10b) содержит процессор (110) и один или более сигнальных процессоров (120), соединенных с возможностью связи с процессором (110), причем один или более сигнальных процессоров (120) сконфигурированы для соединения с возможностью связи с первым измерительным узлом (10a) и вторым измерительным узлом (10b).
Предпочтительно, один или более сигнальных процессоров (120) дополнительно сконфигурированы для приема первого сигнала (12a) датчика от первого измерительного узла (10a) и второго сигнала (12b) датчика от второго измерительного узла (10b).
Предпочтительно, один или более сигнальных процессоров (120) дополнительно сконфигурированы для оцифровки первого сигнала (12a) датчика и второго сигнала (12b) датчика.
Предпочтительно, один или более сигнальных процессоров (120) дополнительно сконфигурированы для обеспечения первого сигнала (14a) возбуждения первому измерительному узлу (10a) и второго сигнала (14b) возбуждения второму измерительному узлу (10b).
Предпочтительно, электронный измеритель (100) дополнительно содержит порт (140) связи, соединенный с возможностью связи с процессором (110), причем порт (140) связи сконфигурирован для соединения с возможностью связи с центральным узлом.
Предпочтительно, один или более сигнальных процессоров (120) сконфигурированы для приема первого сигнала (12a) датчика через первый канал (112a) связи и второго сигнала (12b) датчика через второй канал (112b) связи.
Предпочтительно, первый сигнал (12a) датчика состоит из сигналов от левого тензометрического датчика (17al, 17bl) и правого тензометрического датчика (17ar, 17br) в первом измерительном узле (10a), и второй сигнал (12b) датчика состоит из сигналов от левого тензометрического датчика (17al, 17bl) и правого тензометрического датчика (17ar, 17br) во втором измерительном узле (10b).
Предпочтительно, электронный измеритель (100) дополнительно содержит по меньшей мере одно устройство (130) памяти, соединенное с возможностью связи с процессором (110).
В соответствии с объектом, способ управления двух или более измерительных узлов содержит обеспечение первого сигнала датчика, причем первый сигнал датчика обеспечивается первым измерительным узлом, обеспечение второго сигнала датчика, причем второй сигнал датчика обеспечивается вторым измерительным узлом, и прием первого сигнала датчика и второго сигнала датчика электронным измерителем.
Предпочтительно, способ дополнительно содержит, обеспечение первого сигнала возбуждения первому измерительному узлу, и обеспечение второго сигнала возбуждения второму измерительному узлу, причем первый сигнал возбуждения и второй сигнал возбуждения обеспечиваются электронным измерителем.
Предпочтительно, способ дополнительно содержит оцифровку первого сигнала датчика и второго сигнала датчика по меньшей мере одним сигнальным процессором.
Предпочтительно, первый и второй сигналы датчика предоставляются в электронный измеритель через первый канал связи, и второй сигнал датчика предоставляется через второй канал связи.
Предпочтительно, первый сигнал датчика состоит из сигналов от левого тензометрического датчика и правого тензометрического датчика в первом измерительном узле, и второй сигнал датчика состоит из сигналов от левого тензометрического датчика и правого тензометрического датчика во втором измерительном узле.
В соответствии с объектом, система (5) с электронным измерителем (100) для двух или более измерительных узлов содержит первый измерительный узел (10a), второй измерительный узел (10b); и электронный измеритель (100), соединенный с возможностью связи с первым измерительным узлом (10a) и вторым измерительным узлом (10b).
Предпочтительно, первый измерительный узел (10a) сконфигурирован для измерения одного из свойства и характеристики текучей среды в линии (SL) подачи, и второй измерительный узел (10b) сконфигурирован для измерения одного из свойства и характеристики текучей среды в линии (RL) возврата.
Краткое описание чертежей
Одна и та же ссылочная позиция представляет один и тот же элемент на всех чертежах. Следует понимать, что чертежи не обязательно приведены в масштабе.
Фиг.1 изображает систему 5 с двумя вибрационными датчиками, которая включает в себя электронный измеритель 100 для двух или более измерительных узлов.
Фиг.2 изображает систему 5 с двумя вибрационными датчиками, которая включает в себя электронный измеритель 100 для двух или более измерительных узлов.
Фиг.3 изображает блок-схему электронного измерителя 100.
Фиг.4 изображает способ 400 для управления электронным измерителем для двух или более вибрационных датчиков.
Подробное Описание
Чертежи на Фиг.1-4 и нижеследующее описание демонстрируют конкретные примеры для пояснения специалистам в данной области техники того, как реализовать и использовать наилучший вариант реализации электронного измерителя для двух или более измерительных узлов. С целью пояснения принципов изобретения, некоторые традиционные объекты были упрощены или исключены. Специалистам в данной области техники будут очевидны возможные вариации этих примеров, которые находятся в пределах объема притязаний настоящего описания. Специалистам в данной области техники будет очевидно, что описанные ниже признаки могут быть различным образом скомбинированы, образуя множественные вариации электронного измерителя для двух или более измерительных узлов. Таким образом, описываемые ниже варианты реализации ограничиваются не описанными ниже конкретными примерами, а только пунктами формулы изобретения и их эквивалентами.
Электронный измеритель для двух или более вибрационных датчиков сконфигурирован для связи с двумя или более измерительными узлами. Электронный измеритель может включать в себя процессор, который соединен с возможностью связи с одним или более сигнальными процессорами. Один или более сигнальных процессоров сконфигурированы для соединения с возможностью связи с первым измерительным узлом и вторым измерительным узлом. Электронный измеритель может быть соединен с возможностью связи с первым измерительным узлом через первый канал связи и вторым измерительным узлом через второй канал связи. Первый и второй каналы связи могут быть сконфигурированы для передачи сигналов датчика, возбуждения, температуры, и/или для передачи других сигналов. Соответственно, для управления двумя или более измерительными узлами может быть использован только один электронный измеритель, что может сократить затраты, связанные с использованием двух электронных измерителей.
Система с вибрационным датчиком
На Фиг.1 показана система 5 с двумя вибрационными датчиками, которая включает в себя электронный измеритель 100 для двух или более измерительных узлов. Как показано на Фиг.1, система 5 с двумя вибрационными датчиками включает в себя первый вибрационный датчик 5a и второй вибрационный датчик 5b. Первый и второй вибрационные датчики 5a, 5b, соответственно, состоят из электронного измерителя 100 и первого и второго измерительного узла 10a, 10b.
Электронный измеритель 100 соединен с возможностью связи с первым и вторым измерительным узлом 10a, 10b через первый и второй набор соединительных кабелей 11a, 11b. Первый и второй набор соединительных кабелей 11a, 11b связаны (например, прикреплены, зафиксированы, и т.д.) с первым и вторым портом 27a, 27b связи на электронном измерителе 100. Первый и второй набор соединительных кабелей 11a, 11b также связаны с первым и вторым измерительным узлом 10a, 10b через первый и второй порт 7a, 7b связи на первой и втором измерительном узле 10a, 10b. Электронный измеритель 100 сконфигурирован для предоставления информации по каналу 26 на центральный узел. Первый и второй измерительные узлы 10a, 10b показаны с корпусом, который окружает расходомерные трубопроводы. Электронный измеритель 100 и первый и второй измерительные узлы 10a, 10b описываются более подробно ниже в отношении Фиг.2 и 3.
Снова обращаясь к Фиг.1, первый и второй вибрационные датчики 5a, 5b могут быть использованы, например, для вычисления различия расхода и/или общего расхода между линией SL подачи и линией RL возврата. Более конкретно, система 5 с двумя вибрационными датчиками может быть использована в криогенном применении, когда текучая среда подается из резервуара в жидком состоянии и затем возвращается в резервуар в газообразном состоянии. В одном примерном криогенном применении, первый измерительный узел 10a может быть частью линии SL подачи, которая подает LNG на LD диспенсер сжиженных природных газов, и второй измерительный узел 10b может быть частью линии RL возврата от LD диспенсера сжиженных природных газов. Полный поток через второй измерительный узел 10b может быть вычтен из полного потока через первый измерительный узел 10a для определения общего количества LNG, поставляемого транспортному средству для перевозки сжиженных природных газов. Это примерное применение с линией SL подачи и линией RL возврата показано пунктирными линиями для иллюстрации того, что система 5 с двумя вибрационными датчиками может быть использована в других применениях. Могут быть использованы другие криогенные текучие среды, такие как водород, или тому подобное. Можно также отметить, что вычисления в описанных и других вариантах реализации могут быть выполнены электронным измерителем 100, что описывается более подробно ниже.
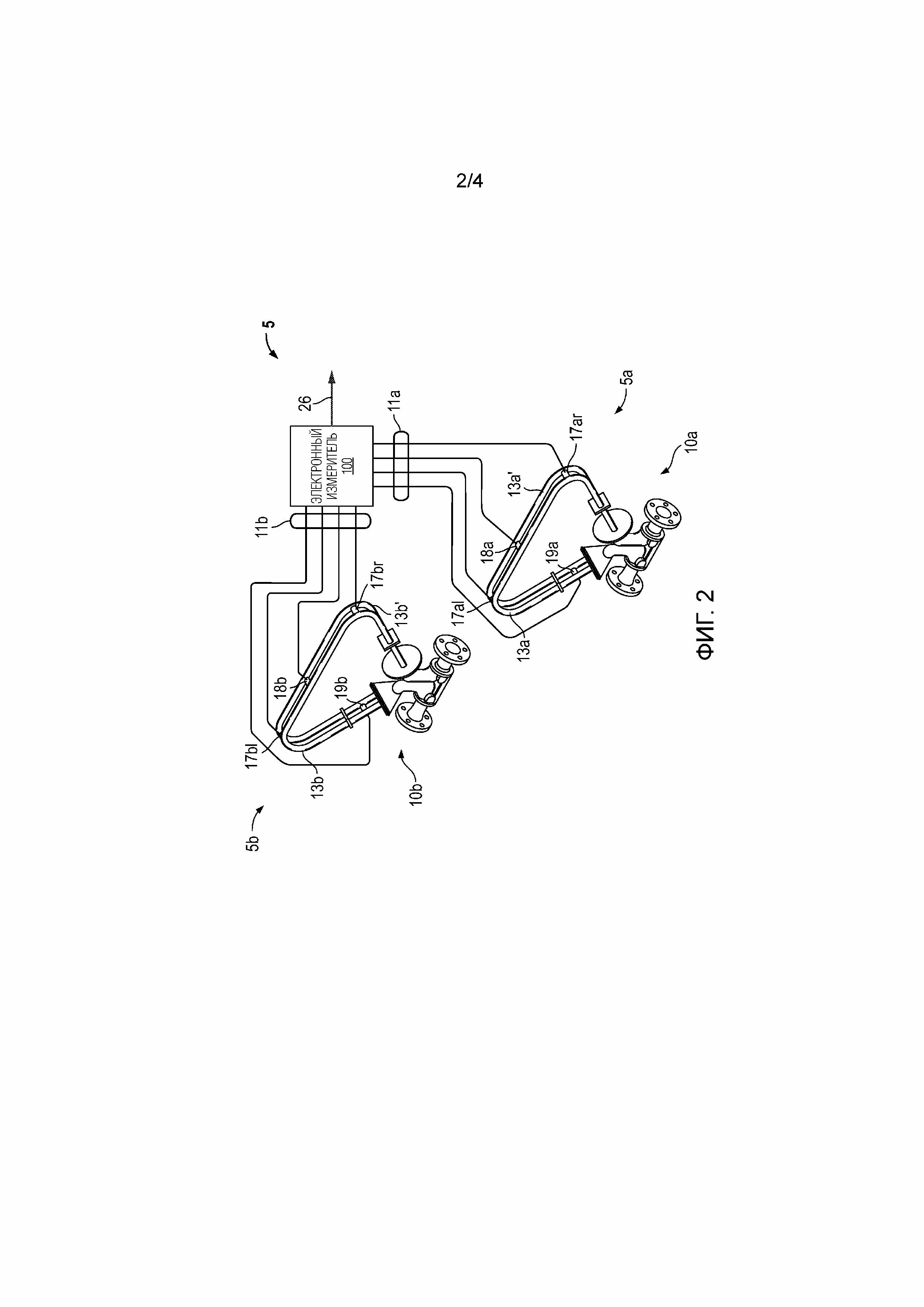
На Фиг.2 показана система 5 с двумя вибрационными датчиками, которая включает в себя электронный измеритель 100 для двух или более измерительных узлов. Как показано на Фиг.2, система 5 с двумя вибрационными датчиками включает в себя первый вибрационный датчик 5a и второй вибрационный датчик 5b, описанный выше в связи с Фиг.1. Корпуса на электронном измерителе 100 и первом и втором измерительных узлах 10a, 10b не показаны для ясности. Первый и второй измерительные узлы 10a, 10b реагируют на массовый расход и плотность обрабатываемого материала. Электронный измеритель 100 соединен с первым и вторым измерительными узлами 10a, 10b через первый и второй набор соединительных кабелей 11a, 11b для предоставления информации о плотности, массовом расходе и температуре по каналу 26, а также для предоставления другой информации. Описывается конструкция расходомера Кориолиса, хотя специалистам в данной области техники будет очевидно, что настоящее изобретение может быть осуществлено как вибрационный трубопроводный денситометр, камертонный денситометр, или тому подобное.
Первый и второй измерительные узлы 10a, 10b включают в себя пару параллельных трубопроводов 13a, 13a' и 13b, 13b', первый и второй механизмы 18a, 18b возбуждения, температурные датчики 19a, 19b, и пару левых и правых тензометрических датчиков 17al, 17ar и 17bl, 17br. Каждая пара трубопроводов 13a, 13a' и 13b, 13b' изгибается в двух симметричных местах вдоль длины трубопроводов 13a, 13a' и 13b, 13b' и по существу параллельны по всей их длине. Трубопроводы 13a, 13a' и 13b, 13b' приводятся в движение механизмами 18a, 18b возбуждения в противоположных направлениях относительно их соответствующих изгибных осей, что соответствует первой несинфазной изгибной колебательной моде расходомера. Механизмы 18a, 18b возбуждения могут содержать любую из многочисленных конструкций, например, магнит, установленный на трубопроводах 13a', 13b' и противостоящую индукционную катушку, установленную на трубопроводах 13a, 13b и через которую проходит переменный ток для возбуждения колебаний обоих трубопроводов 13a, 13a' и 13b, 13b'. Подходящий сигнал возбуждения подается электронным измерителем 100 на механизмы 18a, 18b возбуждения.
Первый и второй вибрационные датчики 5a, 5b могут быть первоначально откалиброваны, и может быть создан калибровочный коэффициент расхода, FCF, вместе с нулевым смещением ΔT0. При использовании, калибровочный коэффициент расхода FCF может быть умножен на временную задержку ΔT, измеренную тензометрическими датчиками, минус нулевое смещение ΔT0, для создания массового расхода


Где:
FCF=калибровочный коэффициент расхода
ΔTmeasured=измеренная временная задержка
ΔT0=начальное нулевое смещение
Температурные датчики 19a, 19b установлены на трубопроводах 13a', 13b' для непрерывного измерения температуры трубопроводов 13a', 13b'. Температура трубопроводов 13a', 13b' и, следовательно, напряжение, появляющееся на температурных датчиках 19a, 19b для данного тока, определяется температурой материала, проходящего через трубопроводы 13a', 13b'. Зависящие от температуры напряжения, появляющиеся на температурных датчиках 19a, 19b, могут быть использованы электронным измерителем 100 для компенсации изменения в упругих модулях трубопроводов 13a', 13b' вследствие любых изменений температуры трубопровода. В показанном варианте реализации температурные датчики 19a, 19b представляют собой резистивные температурные детекторы (RTD). Хотя описанные здесь варианты реализации используют датчики RTD, в альтернативных вариантах реализации могут быть использованы другие температурные датчики, такие как термисторы, термопары, и т.д.
Электронный измеритель 100 принимает сигналы левого и правого датчиков от левого и правого тензометрических датчиков 17al, 17ar и 17bl, 17br и сигналы температуры от температурных датчиков 19a, 19b через первый и второй набор соединительных кабелей 11a, 11b. Электронный измеритель 100 предоставляет сигнал возбуждения на механизмы 18a, 18b возбуждения и заставляет колебаться первую и вторую пару трубопроводов 13a, 13a' и 13b, 13b'. Электронный измеритель 100 обрабатывает сигналы левого и правого датчиков и сигналы температуры для вычисления массового расхода и плотности материала, проходящего через первый и/или второй измерительный узел 10a, 10b. Эта информация, наряду с другой информацией, подается электронным измерителем 100 по каналу 26 в виде сигнала.
Можно отметить, что хотя система 5 с двумя вибрационными датчиками, показанная на Фиг.1 и 2, включает в себя только два измерительных узла 10a, 10b, система 5 с двумя вибрационными датчиками может быть использована в системах, которые включают в себя более двух измерительных узлов. Например, электронный измеритель может быть сконфигурирован для связи с тремя или более измерительными узлами. В такой конфигурации, система 5 с двумя вибрационными датчиками может быть частью из электронного измерителя и двух из трех или более измерительных узлов.
Электронный измеритель
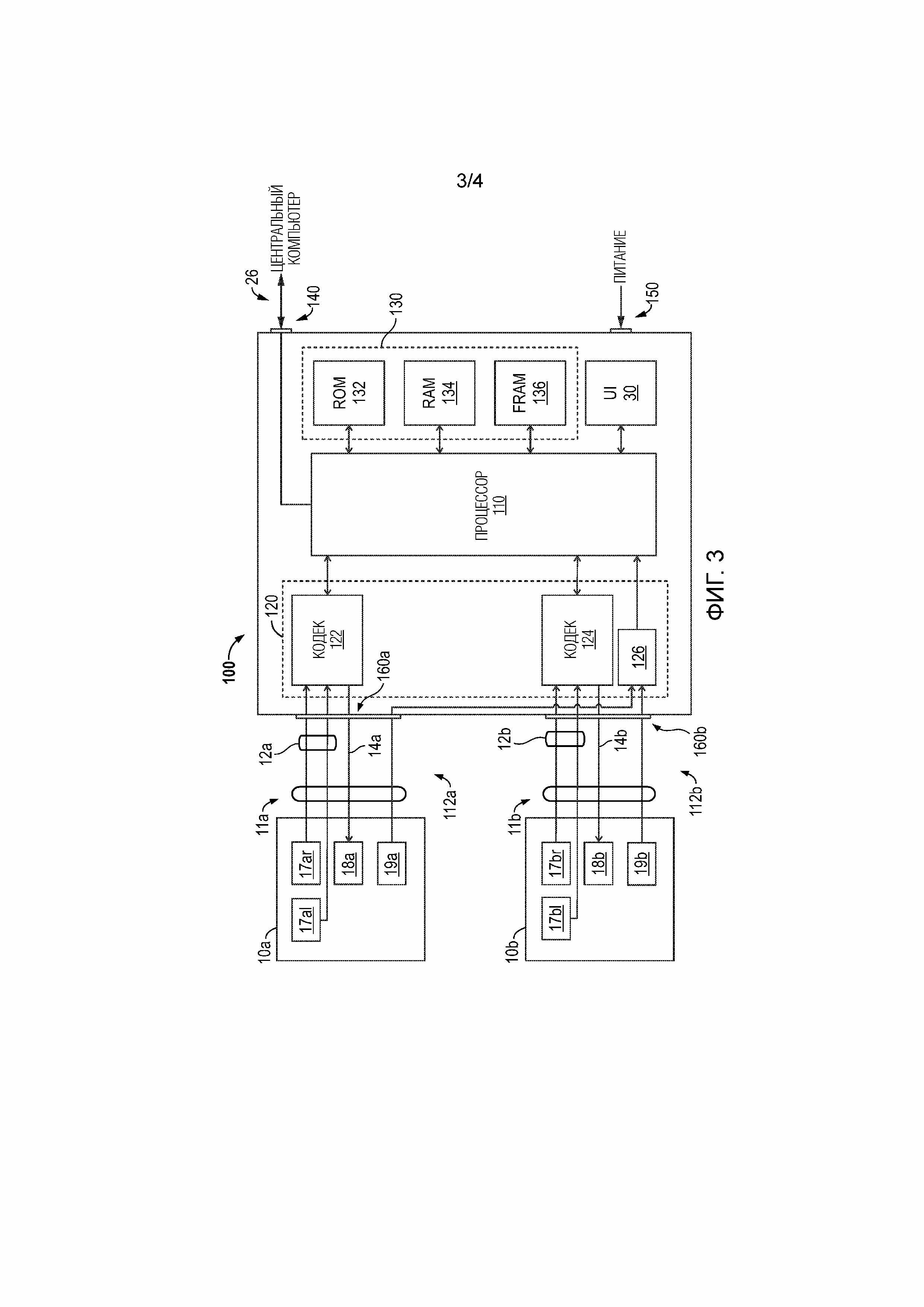
На Фиг.3 показана блок-схема электронного измерителя 100. Как показано на Фиг.3, электронный измеритель 100 соединен с возможностью связи с первым и вторым измерительными узлами 10a, 10b. Как описано выше в связи с Фиг.1, первый и второй измерительные узлы 10a, 10b включают в себя левый и правый тензометрические датчики 17al, 17ar и 17bl, 17br, механизмы 18a, 18b возбуждения, и температурные датчики 19a, 19b, которые соединены с возможностью связи с электронным измерителем 100 через первый и второй набор соединительных кабелей 11a, 11b через первый и второй канал 112a, 112b связи, и первый и второй порт 160a, 160b ввода-вывода.
Электронный измеритель 100 предоставляет первый и второй сигналы 14a, 14b возбуждения через соединительные кабели 11a, 11b. Более конкретно, электронный измеритель 100 обеспечивает первый сигнал 14a возбуждения механизму 18a возбуждения в первом измерительном узле 10a. Электронный измеритель 100 также сконфигурирован для обеспечения второго сигнала 14b возбуждения механизму 18b возбуждения во втором измерительном узле 10b. Кроме того, первый и второй сигналы 12a, 12b датчика, соответственно, предоставляются первому и второму измерительными узлами 10a, 10b. Более определенно, в показанном варианте реализации, первый сигнал 12a датчика предоставляется левым и правым тензометрическими датчиками 17al, 17ar в первом измерительном узле 10a. Второй сигнал 12b датчика предоставляется левым и правым тензометрическими датчиками 17bl, 17br во втором измерительном узле 10b. Как можно отметить, первый и второй сигналы 12a, 12b датчика, соответственно предоставляются на электронный измеритель 100 через первый и второй каналы 112a, 112b связи.
Электронный измеритель 100 включает в себя процессор 110, соединенный с возможностью связи с одним или более сигнальными процессорами 120 и одним или более устройствами 130 памяти. Процессор 110 также соединен с возможностью связи с пользовательским интерфейсом 30. Процессор 110 соединен с возможностью связи с центральным узлом через порт 140 связи по каналу 26 и принимает электропитание через порт 150 электропитания. Процессор 110 может быть микропроцессором, хотя может быть использован любой подходящий процессор. Например, процессор 110 может состоять из суб-процессоров, таких как многоядерный процессор, последовательных портов связи, периферийных интерфейсов (например, последовательный периферийный интерфейс), встроенного в микросхему устройства памяти, портов ввода-вывода, и/или тому подобного. В этих и других вариантах реализации, процессор 110 сконфигурирован для выполнения операций на принятых и обработанных сигналах, таких как оцифрованные сигналы.
Процессор 110 может принимать оцифрованные сигналы датчика от одного или более сигнальных процессоров 120. Процессор 110 также сконфигурирован для предоставления информации, такой как разность фаз, свойство текучей среды в первом или втором измерительном узле 10a, 10b, или подобное. Процессор 110 может предоставить информацию на центральный узел через порт 140 связи. Процессор 110 также может быть сконфигурирован для связи с одним или более устройствами 130 памяти для приема и/или хранения информации в одном или более устройствах 130 памяти. Например, процессор 110 может принимать калибровочные коэффициенты и/или нулевые значения измерительного узла (например, разность фаз, когда имеется нулевой расход) от одного или более устройств 130 памяти. Каждый из калибровочных коэффициентов и/или нулевых значений измерительного узла может соответственно быть связан с первым и вторым вибрационным датчиком 5a, 5b и/или первым и вторым измерительным узлом 10a, 10b. Процессор 110 может использовать калибровочные коэффициенты для обработки оцифрованных сигналов датчика, принятых от одного или более сигнальных процессоров 120.
Один или более сигнальных процессоров 120 показаны как состоящие из первого и второго кодера/декодера (CODEC) 122, 124 и аналого-цифрового преобразователя (ADC) 126. Один или более сигнальных процессоров 120 могут формировать аналоговые сигналы, оцифровывать сформированные аналоговые сигналы, и/или обеспечивать оцифрованные сигналы. Первый и второй CODEC 122, 124 сконфигурированы для приема сигналов левого и правого датчиков от левого и правого тензометрических датчиков 17al, 17ar и 17bl, 17br. Первый и второй CODEC 122, 124 также сконфигурированы для предоставления первого и второго сигналов 14a, 14b возбуждения на первый и второй механизм 18a, 18b возбуждения. В альтернативных вариантах реализации может быть использовано больше или меньше сигнальных процессоров. Например, единственный CODEC может быть использован для первого и второго сигналов 12a, 12b датчика и первого и второго сигналов 14a, 14b возбуждения. Дополнительно или альтернативно, два аналого-цифровых преобразователя могут быть использованы вместо единственного аналого-цифрового преобразователя 126.
В показанном варианте реализации одно или более устройств 130 памяти состоят из постоянного запоминающего устройства (ROM) 132, устройства оперативной памяти (RAM) 134, и сегнетоэлектрического устройства памяти прямого доступа (FRAM) 136. Однако, в альтернативных вариантах реализации, одно или более устройств 130 памяти могут содержать больше или меньше устройств памяти. Дополнительно или альтернативно, одно или более устройств 130 памяти могут состоять из устройств памяти различного типа (например, энергозависимых, энергонезависимых, и т.д.). Например, различного типа устройства энергонезависимой памяти, такие как, например, стираемое программируемое постоянное запоминающее устройство (EPROM), или подобное, могут быть использованы вместо FRAM 136.
Можно также отметить, что хотя система 5 с двумя вибрационными датчиками, показанная на Фиг.3, включает в себя только два измерительных узла 10a, 10b, система 5 с двумя вибрационными датчиками может быть использована в системах, которые включают в себя больше, чем два измерительных узла. Например, электронный измеритель может быть сконфигурирован для связи с тремя или более измерительными узлами. В такой конфигурации, система 5 с двумя вибрационными датчиками может быть частью из электронного измерителя и двух из трех или более измерительных узлов.
Соответственно, электронный измеритель 100 может быть сконфигурирован для преобразования первого и второго сигналов 12a, 12b датчика из аналоговых сигналов в цифровые сигналы. Электронный измеритель 100 также может быть сконфигурирован для обработки оцифрованных сигналов датчика для определения свойств текучей среды в первом и втором измерительных узлах 10a, 10b. Например, в варианте реализации электронный измеритель 100 может соответственно определять первую и вторую разность фаз между левым и правым тензометрическими датчиками 17al, 17ar и 17bl, 17br в первом и втором измерительных узлах 10a, 10b. Примерный способ описан, в частности, ниже в связи с Фиг.4.
Способ
На Фиг.4 показан способ 400 для управления электронным измерителем для двух или более вибрационных датчиков. На этапе 410 способ 400 обеспечивает первый сигнал датчика, причем первый датчик обеспечен первым измерительным узлом. На этапе 420 обеспечивает второй сигнал датчика, причем второй сигнал датчика обеспечивается вторым измерительным узлом. Первый и второй измерительные узлы могут быть первым и вторым измерительными узлами 10a, 10b, описанными выше в связи с Фиг.1-3. На этапе 430 первый и второй сигналы датчиков принимаются электронным измерителем, который может быть электронным измерителем 100, описанным выше в связи с Фиг.2 и 3.
В варианте реализации, первый и второй сигналы 12a, 12b датчиков могут быть предоставлены на один или более сигнальных процессоров 120 в электронном измерителе 100. Например, первый и второй измерительные узлы 10a, 10b могут предоставить первый и второй сигналы 12a, 12b датчиков на первый и второй CODEC 122, 124. Первый и второй сигналы 12a, 12b датчиков могут быть в аналоговой форме (например, непрерывно изменяющимся напряжением и/или током), хотя может быть обеспечен любой подходящий сигнал.
Могут быть выполнены дополнительные этапы. Например, электронный измеритель 100 может обеспечить первый и второй сигналы 14a, 14b возбуждения первому и второму измерительным узлам 10a, 10b. Более конкретно, процессор 110 может предоставить сигнал на один или более сигнальных процессоров 120. Сигнал, предоставленный процессором 110, может управлять одним или более параметрами (например, амплитудой, частотой, фазовым углом, и т.д.) сигналов возбуждения, предоставляемых для первого и второго измерительных узлов 10a, 10b. Один или более сигнальных процессоров 120 могут принимать сигнал, обеспечиваемый процессором 110, и предоставлять первый и второй сигналы 14a, 14b возбуждения на основании сигнала, обеспеченного процессором 110.
Например, процессор 110 может предоставить желаемые первые и вторые амплитуду и фазовый угол на первый и второй CODEC 122, 124. Первый и второй CODEC 122, 124 может принять и оцифровать первый и второй сигналы 12a, 12b датчиков. Оцифрованные первый и второй сигналы 12a, 12b датчиков могут быть соответственно отрегулированы до совпадения с первыми и вторыми желаемыми амплитудой и фазовым углом, предоставленными процессором 110. Первые амплитуда и/или фазовый угол могут быть отличными от вторых амплитуды и/или фазового угла. Например, первый сигнал 14a возбуждения может иметь амплитуду, которая меньше амплитуды второго сигнала 14b возбуждения.
Первый и второй сигналы 12a, 12b датчиков также могут быть обработаны для определения свойств текучей среды в первом и втором вибрационных датчиках 5a, 5b. Например, электронный измеритель 100 может принять первый сигнал 12a датчика и определить свойство и/или характеристику текучей среды в первом измерительном узле 10a. В варианте реализации, первый сигнал 12a датчика может содержать сигналы, предоставленные левым и правым тензометрическими датчиками 17al, 17ar и 17bl, 17br в первом измерительном узле 10a. Соответственно, электронный измеритель 100 может сравнить сигналы, принятые от левого и правого тензометрических датчиков 17al, 17ar и 17bl, 17br для определения разности фаз между трубопроводами 13a, 13a' в первом измерительном узле 10a. Разность фаз может быть использована для определения свойства (например, плотности, температуры, состояния, и т.д.) и/или характеристики (например, расхода, фазовых соотношений, размеров пузырьков, и т.д.) текучей среды в первом измерительном узле 10a. Свойство и/или характеристика текучей среды во втором измерительном узле 10b могут быть определены подобным же образом.
В примерном варианте реализации, характеристика текучей среды может быть расходом текучей среды через первый измерительный узел 10a. Расход может быть определен из разности фаз или временной задержки, предоставленных как описано выше, умножая разность фаз или временную задержку на калибровочный коэффициент (например, калибровочный коэффициент расхода (FCF)). Нулевое значение измерителя может быть вычтено из разности фаз или временной задержки до умножения на калибровочный коэффициент. Калибровочный коэффициент соответственно связан с каждым первым и вторым вибрационными датчиками 5a, 5b и/или первым и вторым измерительными узлами 10a, 10b. Соответственно, расход может быть вычислен для текучей среды в каждом из первого и второго измерительных узлов 10a, 10b.
Полный массовый расход в течение периода времени также может быть вычислен. Например, полный массовый расход в течение периода времени для каждого из первого и второго измерительных узлов 10a, 10b может быть вычислен интегрированием массового расхода по промежутку времени. Полный массовый расход для первого измерительного узла 10a может быть отличным от полного массового расхода для второго измерительного узла 10b. Например, первый измерительный узел 10a может быть частью линии подачи, которая предоставляет жидкий природный газ на LNG диспенсер. Второй измерительный узел 10b может быть частью линии возврата, которая удаляет газообразный природный газ из LNG диспенсера. Соответственно, поскольку LNG распределен, полный массовый расход через первый измерительный узел 10a отличается от полного массового расхода через второй измерительный узел 10b.
При работе, электронный измеритель 100 принимает первый и второй сигналы 12a, 12b датчиков. Первый и второй сигналы 12a, 12b датчиков могут включать в себя сигналы, предоставленные левым и правым тензометрическими датчиками 17al, 17ar и 17bl, 17br в первом и втором измерительных узлах 10a, 10b. Разность фаз для каждого сигнала 12a, 12b первого и второго датчиков может быть вычислена, используя сигналы от левого и правого тензометрических датчиков 17al, 17ar и 17bl, 17br. Используя разность фаз, электронный измеритель 100 может, например, вычислить массовый расход через каждый из первого и второго измерительных узлов 10a, 10b.
Электронный измеритель 100 может вычислить полный массовый расход через каждый из первого и второго измерительных узлов 10a, 10b, как описано выше. Электронный измеритель также может сравнить полный массовый расход через первый и второй измерительные узлы 10a, 10b для определения, например, полной массы распределенной текучей среды. Например, в вышеприведенном примере, где первый измерительный узел 10a представляет собой часть линии подачи на LNG диспенсер и второй измерительный узел 10b представляет собой часть линии возврата, общее количество распределенного LNG может быть вычислено вычитанием полного массового расхода через второй измерительный узел 10b из полного массового потока через первый измерительный узел 10a. Поэтому, может быть определена полная масса, которая распределена LNG диспенсером.
Варианты реализации, описанные выше, обеспечивают электронный измеритель для двух или более измерительных узлов. Например, электронный измеритель 100 может быть соединен с возможностью связи с первым и вторым измерительными узлами 10a, 10b. Электронный измеритель 100 может управлять и определять свойства и/или характеристики текучей среды, текущей через первый и второй измерительные узлы 10a, 10b. Поскольку используется единственный электронный измеритель и для управления, и для определения свойств и/или характеристик текучей среды через два или более измерительных узлов, то можно избежать затрат, связанных с использованием электронных измерителей для каждого из двух или более измерительных узлов.
Подробные описания вышеупомянутых вариантов реализации не являются исчерпывающими описаниями всех вариантов реализации, рассматриваемых изобретателями как находящиеся в пределах объема притязаний настоящего описания. В действительности, специалисты в данной области техники увидят, что некоторые элементы вышеописанных вариантов реализации могут по-разному быть объединены или устранены для создания дополнительных вариантов реализации, и такие дополнительные варианты реализации находятся в пределах объема притязаний и положений настоящего описания. Также специалистам в данной области техники будет очевидно, что вышеописанные варианты реализации могут быть объединены полностью или частично для создания дополнительных вариантов реализации в пределах объема притязаний и положений настоящего описания.
Таким образом, хотя конкретные варианты реализации описаны здесь в иллюстративных целях, в рамках настоящего описания возможны различные эквивалентные модификации, как это будет видно специалистам в данной области техники. Предоставленные здесь положения могут быть применены к другому электронному измерителю для двух или более измерительных узлов, а не только к описанным выше и показанным на сопровождающих чертежах вариантам реализации. Соответственно, объем притязаний описанных выше вариантов реализации должен быть определен из нижеследующей формулы.
Реферат
Изобретение относятся к электронному измерителю и, в частности, к электронному измерителю для двух или более измерительных узлов. Предлагается электронный измеритель (100) для двух или более измерительных узлов (10a, 10b) системы с вибрационными датчиками, причем электронный измеритель (100) содержит: процессор (110); один или более сигнальных процессоров (120), соединенных с возможностью связи с процессором (110), причем один или более сигнальных процессоров (120) сконфигурированы для соединения с возможностью связи с первым измерительным узлом (10a) и вторым измерительным узлом (10b); и устройство (130) памяти, хранящее первый калибровочный коэффициент, связанный с первым измерительным узлом (10a), и второй калибровочный коэффициент, связанный со вторым измерительным узлом (10b). Технический результат – сокращение числа электронных измерителей, снижение сложности систем с одним или более измерительными узлами. 3 н. и 12 з.п. ф-лы, 4 ил.
Комментарии