Многофазный расходомер кориолиса - RU2406977C2
Код документа: RU2406977C2
Чертежи

































































Описание
Текст описания приведен в факсимильном виде.















































Реферат
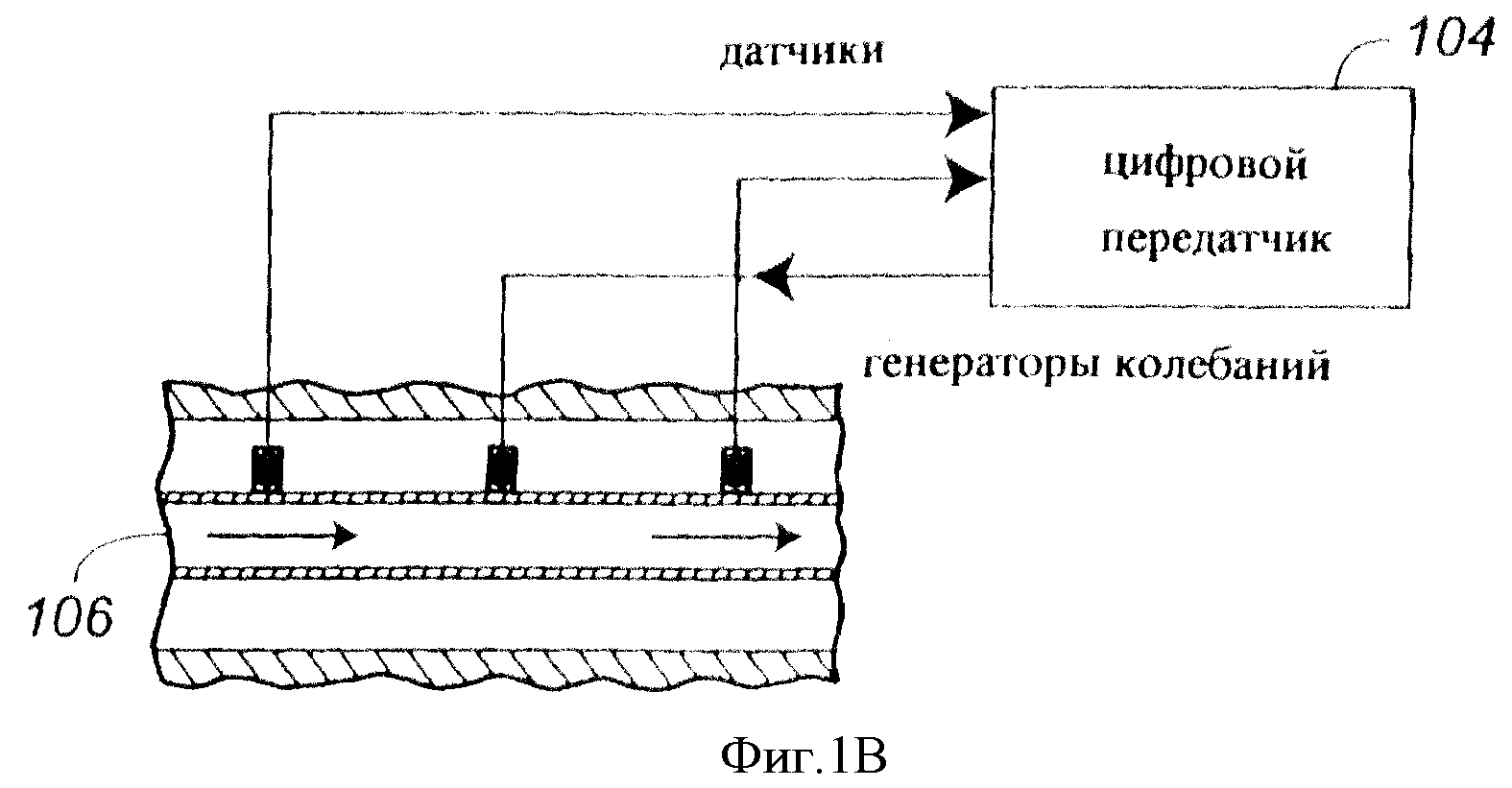
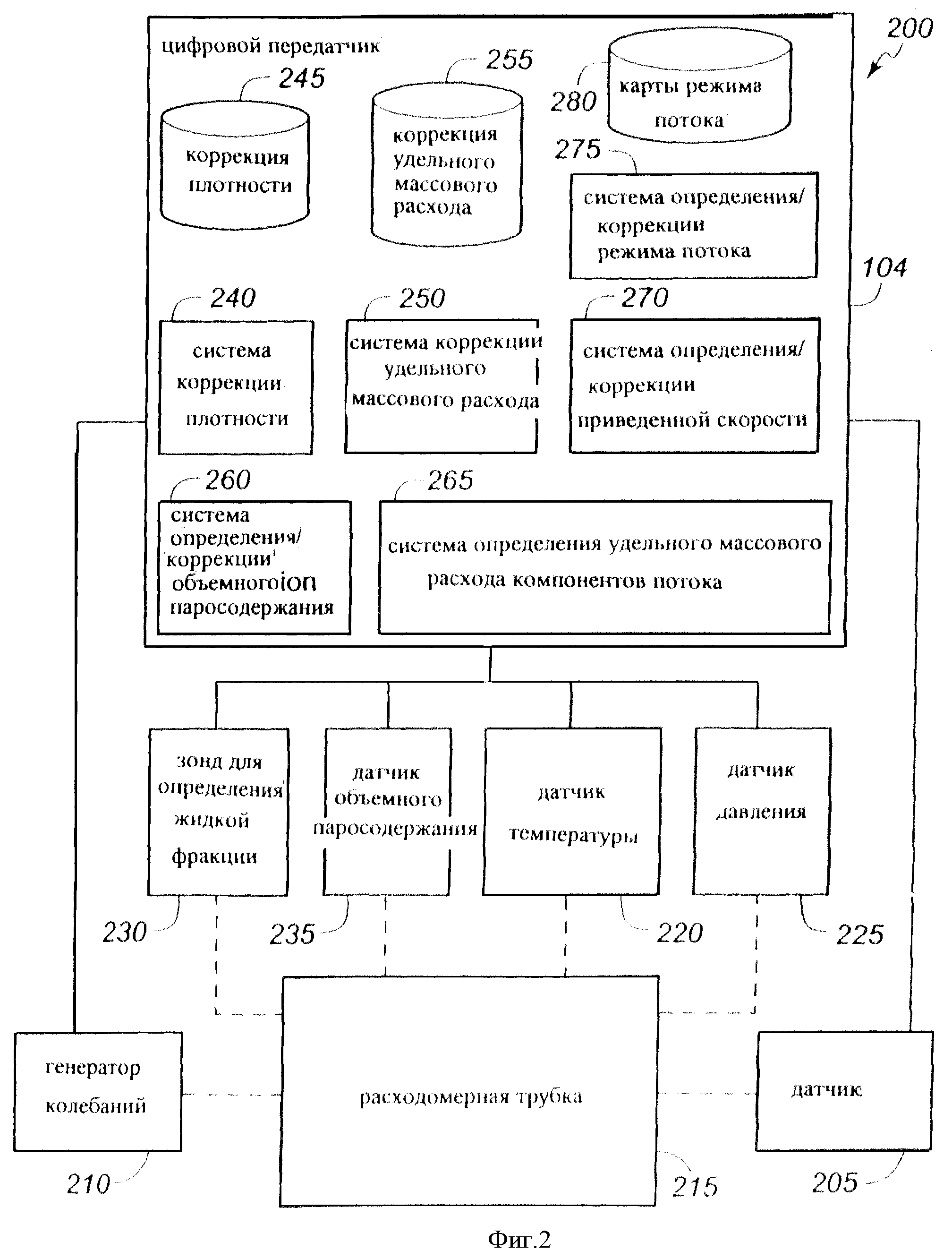
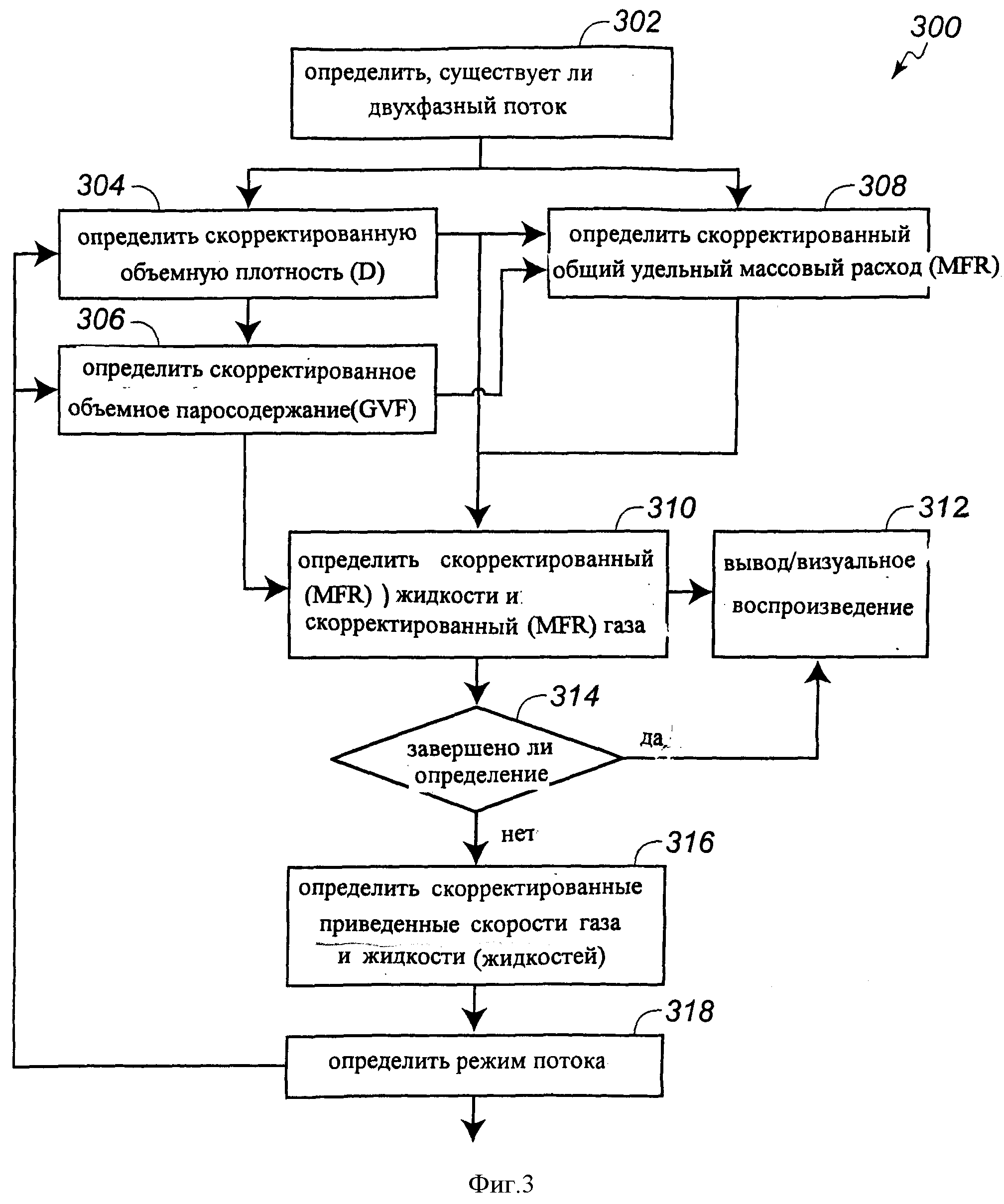
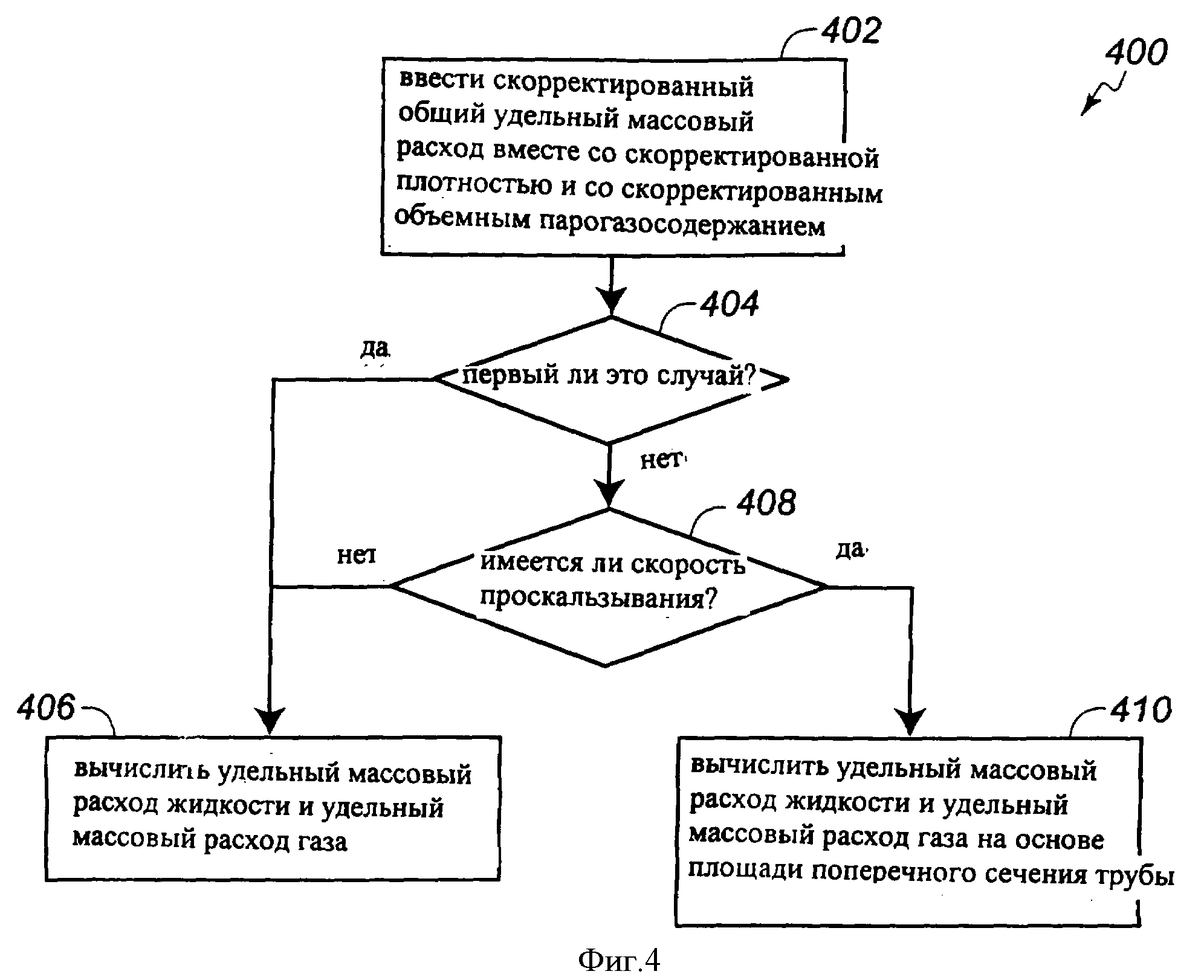
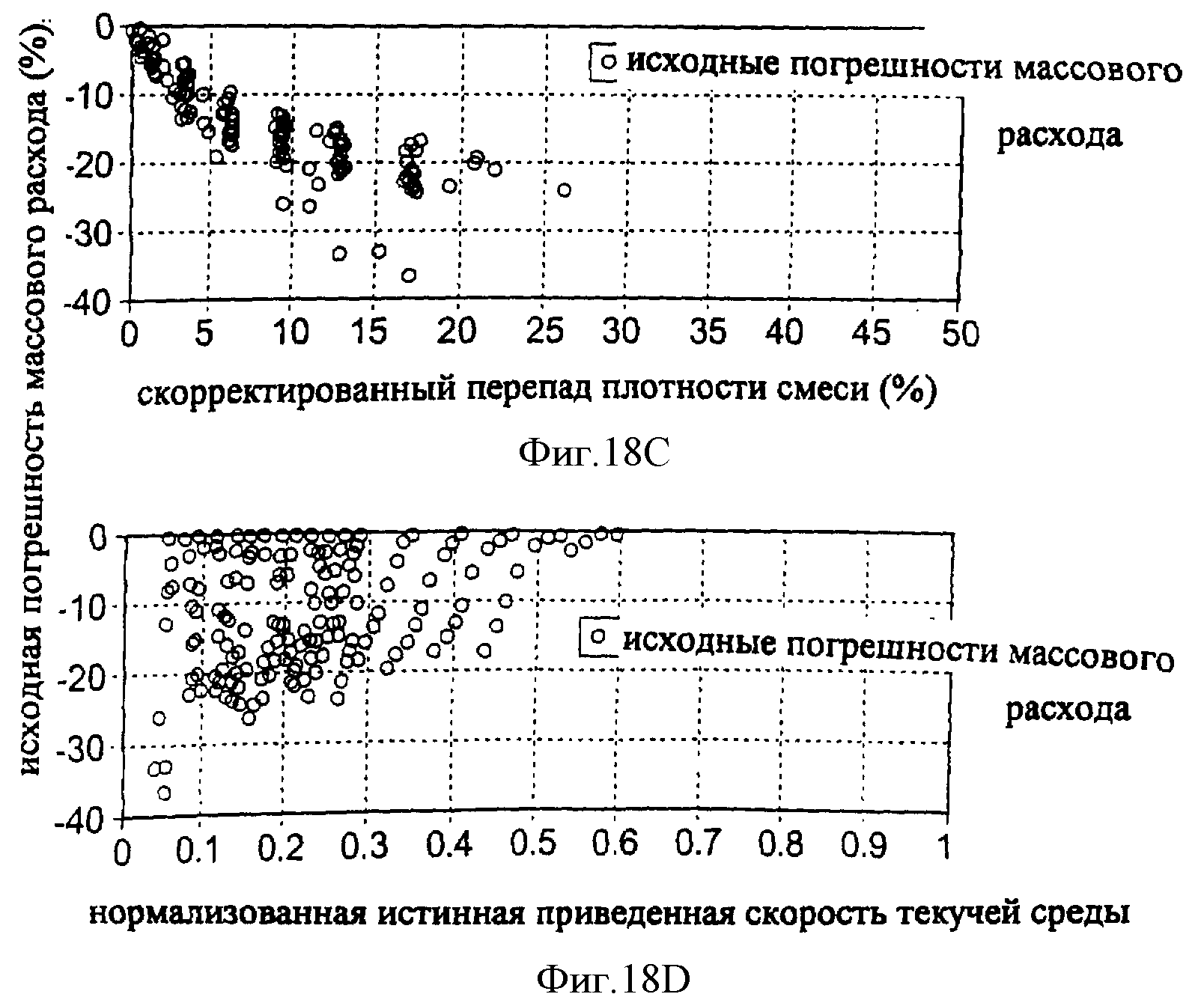
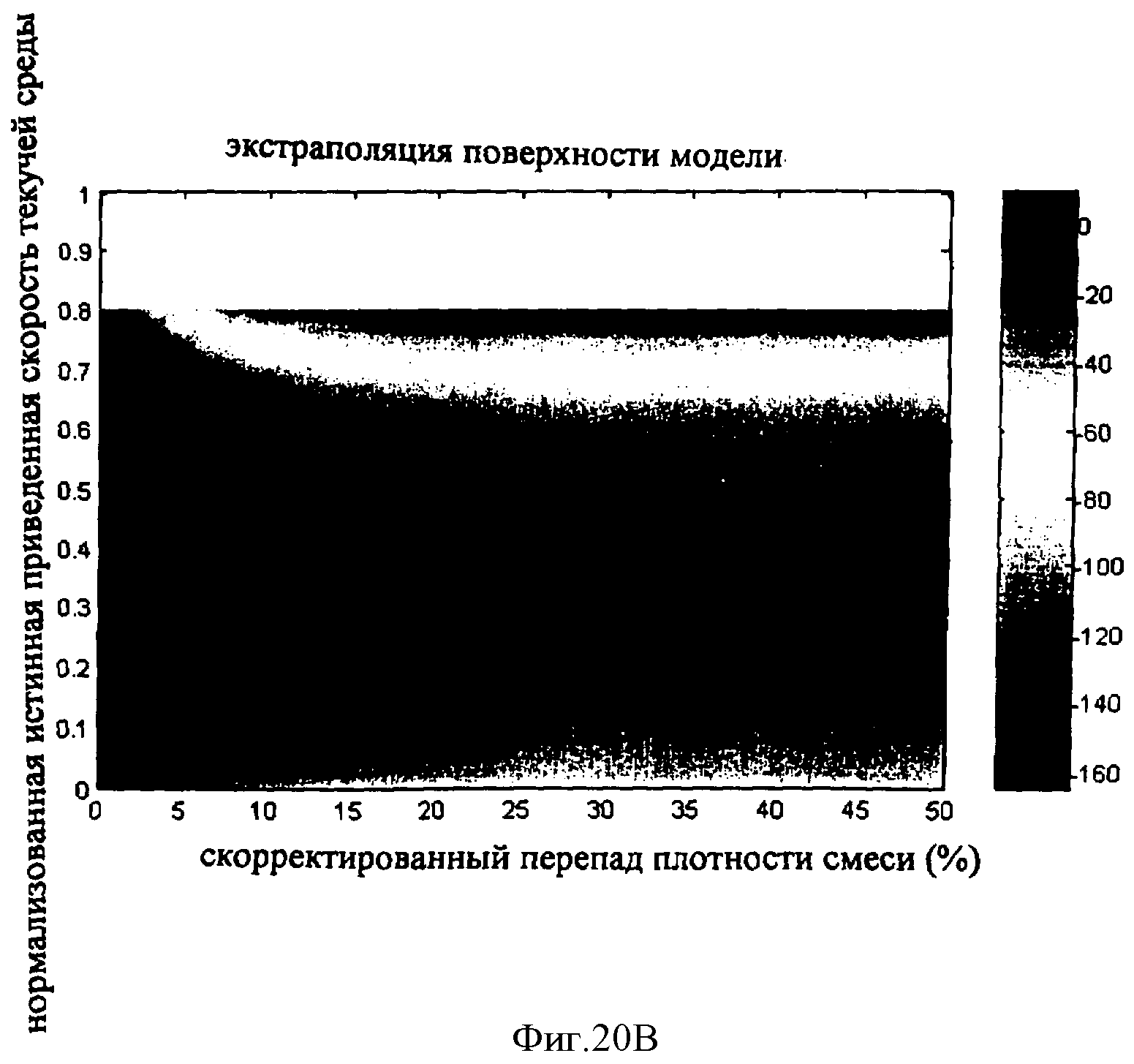
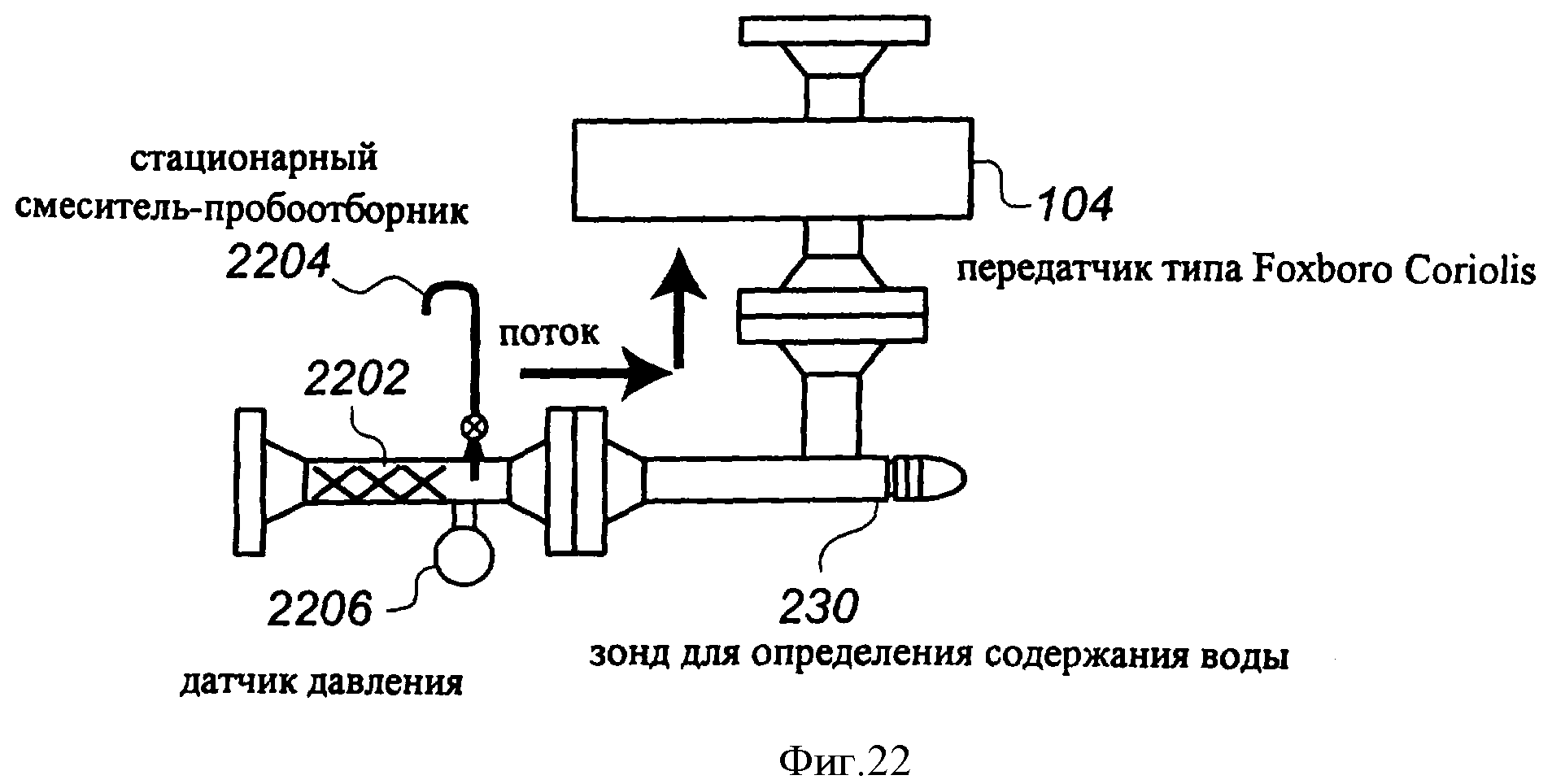
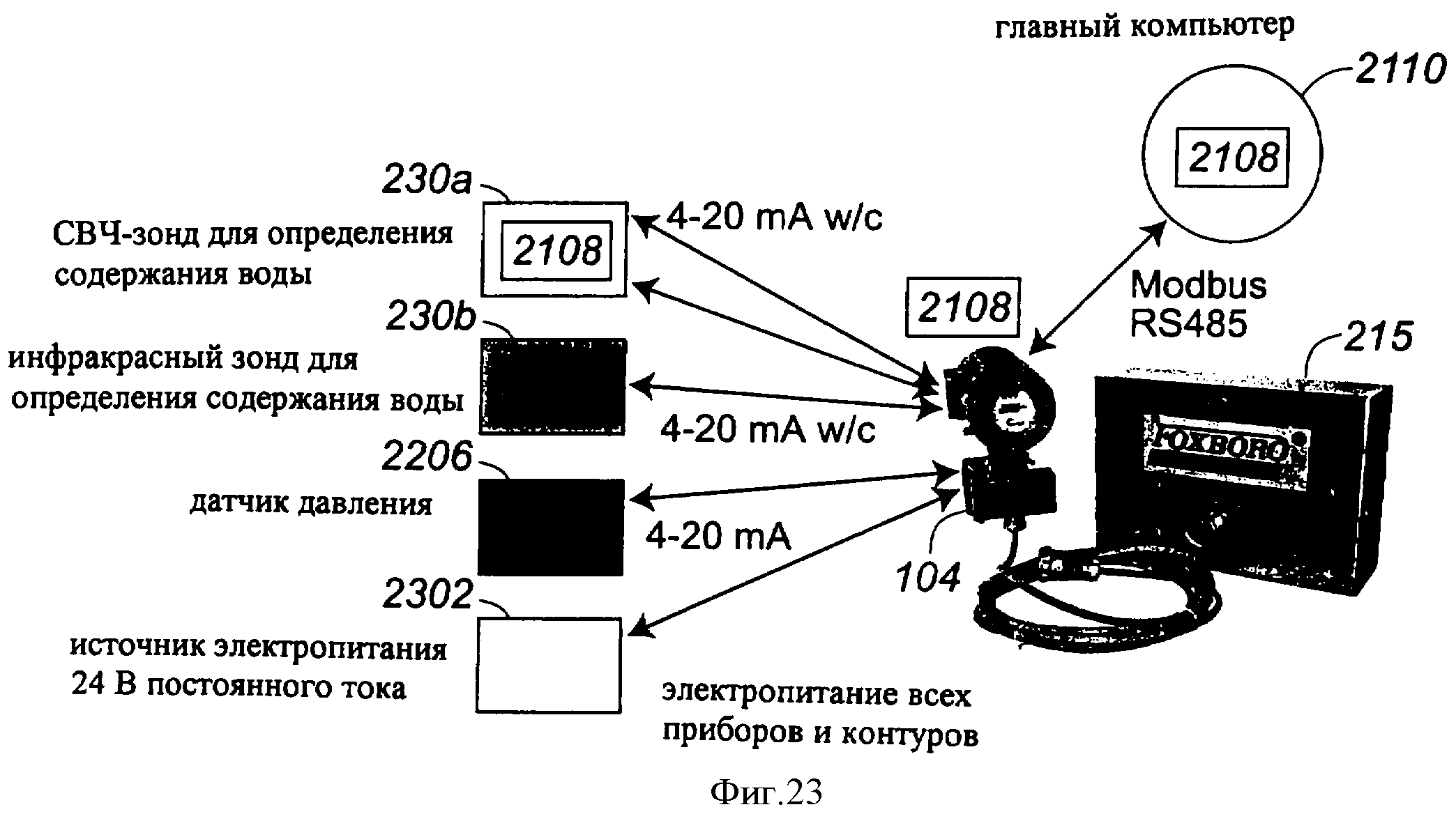
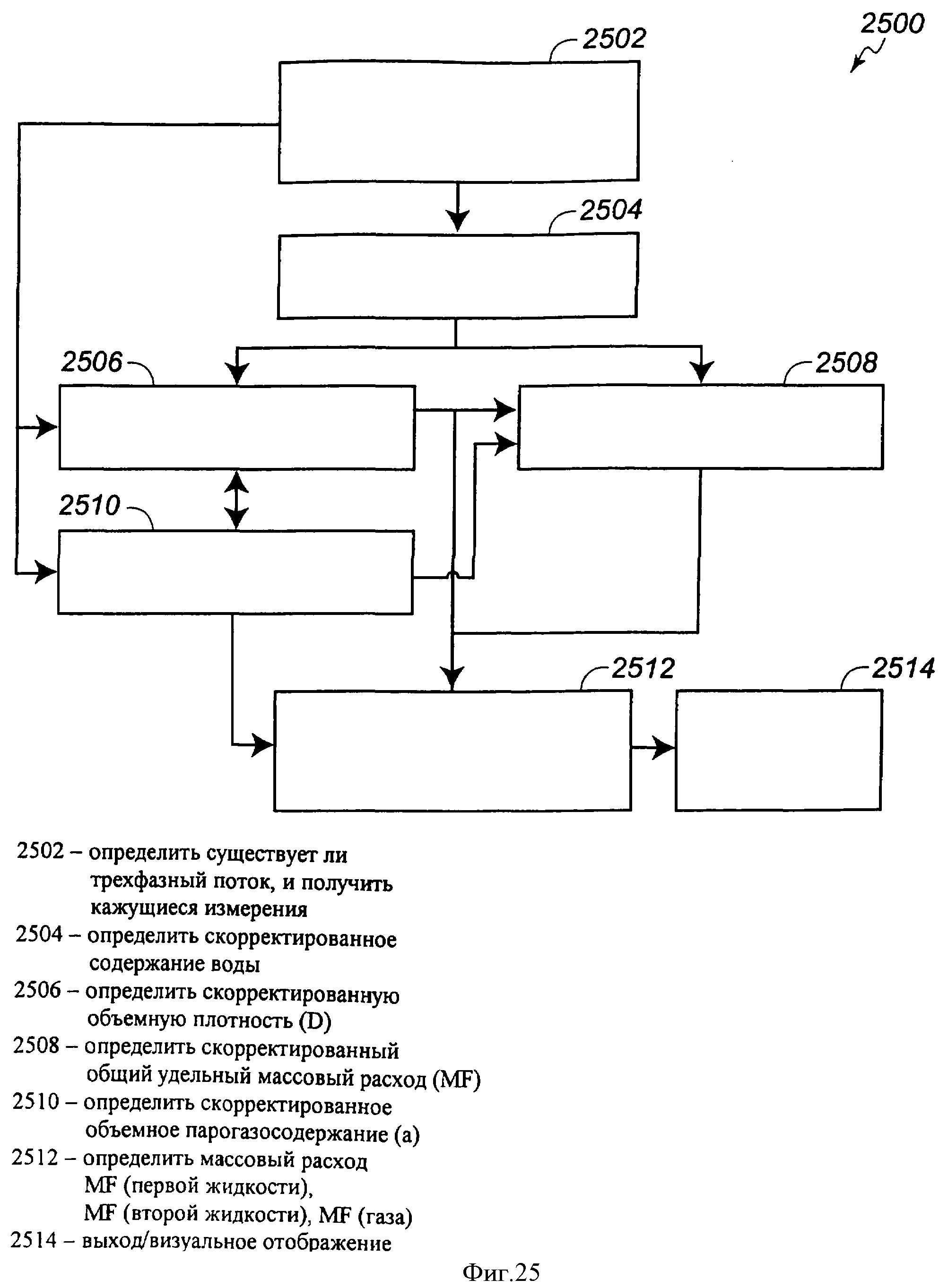
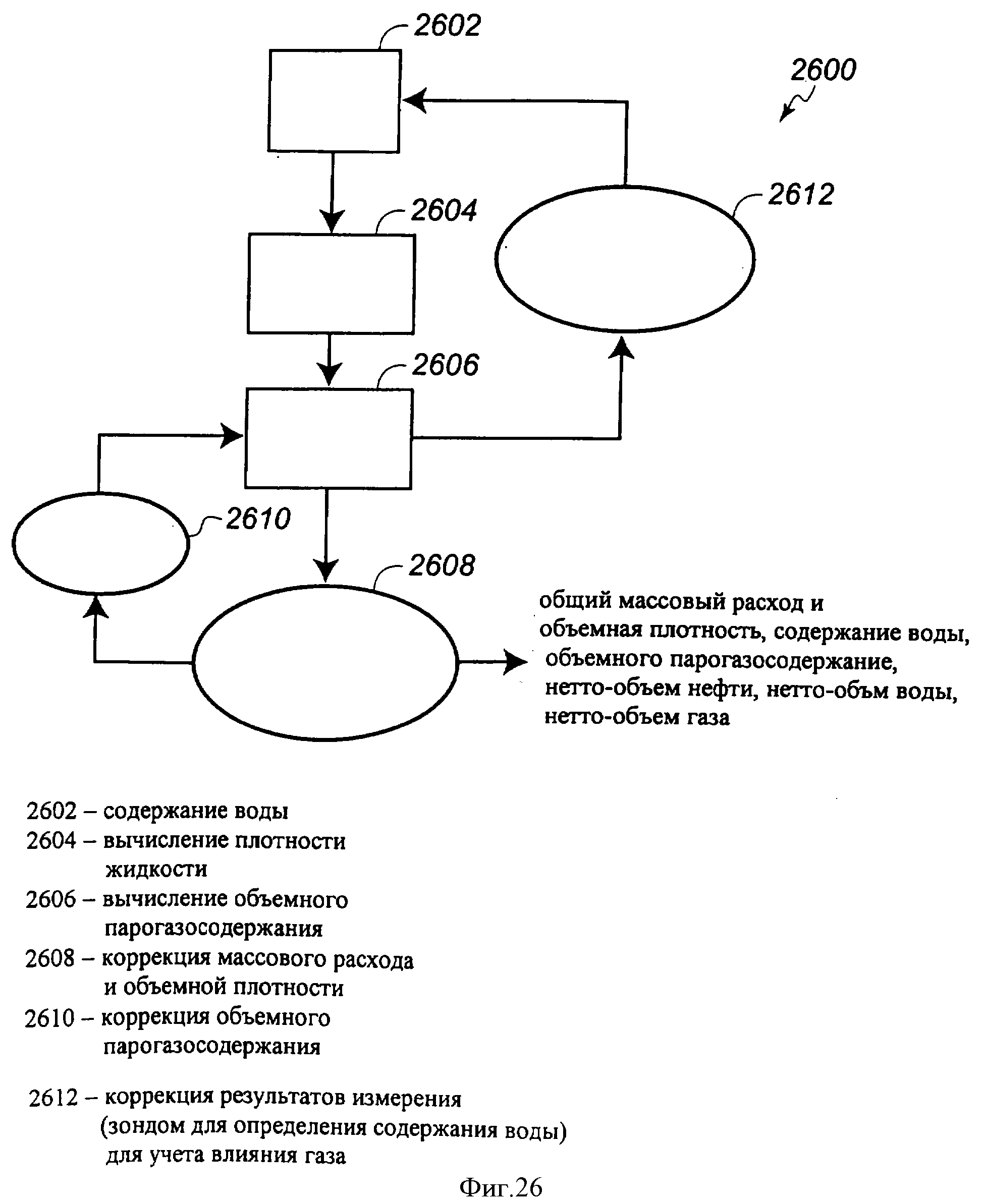
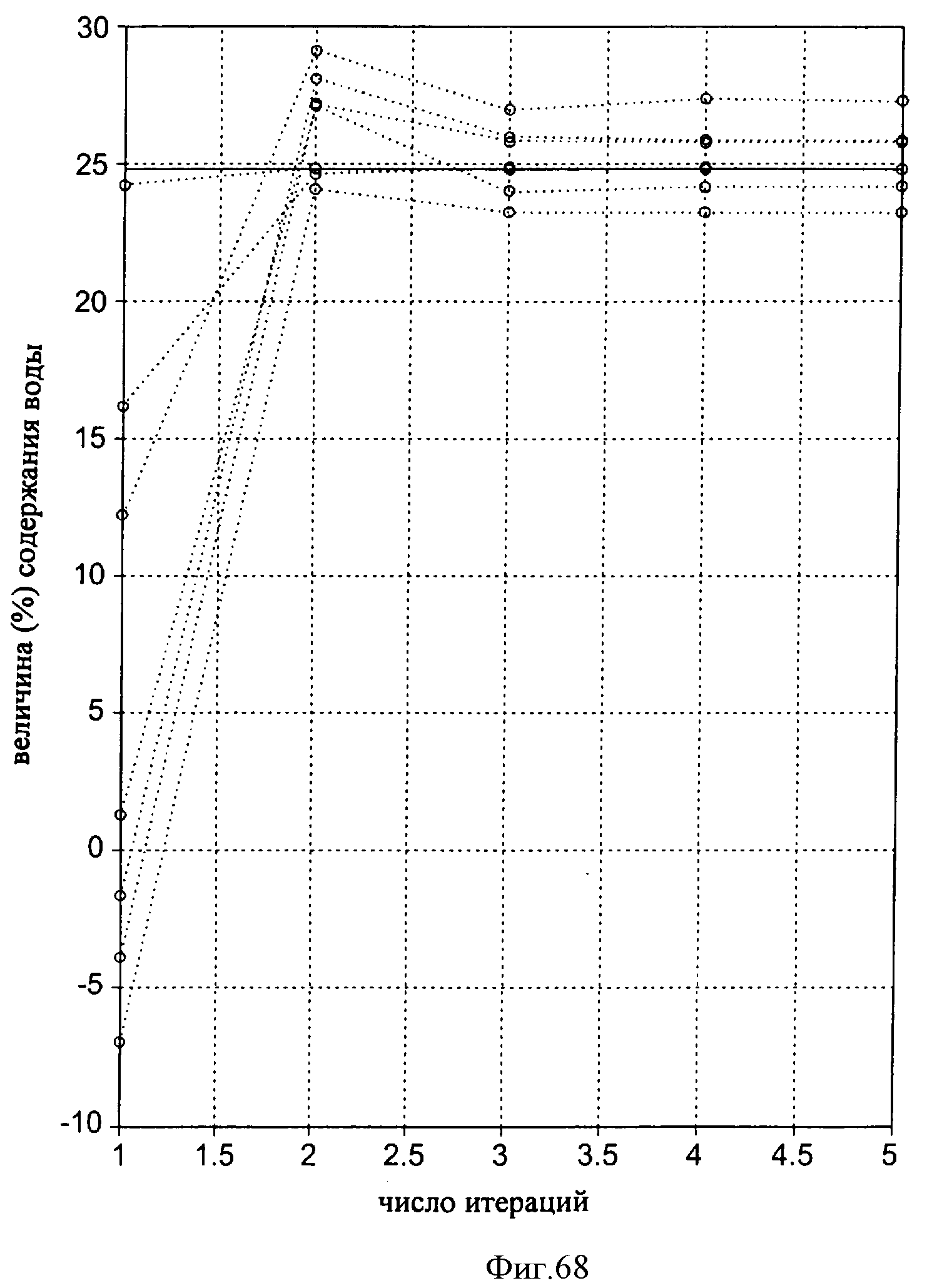
Изобретение может быть использовано для измерения массовых расходов компонентов смеси из нефти и воды, содержащей газ. Приводимая в колебание расходомерная трубка (215), через которую проходит многокомпонентный поток текучей среды, соединена трубопроводом с датчиком в виде зонда (230), служащим для определения кажущегося состояния потока, в частности жидкой фракции (содержания воды). Контроллер цифрового передатчика принимает сигналы датчика (230), датчика (235) объемного газосодержания, а также соединенного с расходомерной трубкой датчика (205), по сигналам которого определяется кажущийся параметр потока, в частности, кажущаяся объемная плотность. Модуль коррекций (2108) служит для определения скорректированного параметра и скорректированного состояния потока. Изобретение повышает точность измерения в широком диапазоне количественного содержания воды и свободного газа в потоке среды. 2 н. и 28 з.п. ф-лы, 107 ил.
Формула
контроллер для приема сигнала датчика от первого датчика, соединенного с колеблемой расходомерной трубкой, содержащей многокомпонентный поток текучей среды, который включает в себя первую жидкость, вторую жидкость и газ, причем контроллер дополнительно служит для анализа сигнала датчика для определения кажущегося параметра потока текучей среды,
второй датчик, служащий для определения кажущегося состояния потока текучей среды, в котором первая жидкость, вторая жидкость и газ смешаны между собой в процессе определения состояния потока этим вторым датчиком, трубопровод, соединяющий второй датчик и колеблемую расходомерную трубку так, что поток текучей среды проходит через указанные второй датчик, трубопровод и расходомерную трубку, а также
модуль коррекций, который служит для ввода кажущегося параметра потока и кажущегося состояния потока и определения из них скорректированного параметра потока
второй датчик служит для обеспечения выхода первого значения кажущегося состояния потока к контроллеру для использования в определении первого скорректированного значения параметра потока;
контроллер служит для обеспечения выхода первого скорректированного значения параметра потока ко второму датчику для определения первого скорректированного значения состояния потока; а
второй датчик служит для обеспечения выхода второго скорректированного значения состояния потока к контроллеру для использования в определении скорректированного значения параметра потока.
первую модель коррекции, которая является особой для типа второго датчика и состояния потока и которая служит для вывода скорректированного состояния потока; и
вторую модель коррекции, которая является особой для типа кажущегося параметра потока и которая служит для вывода скорректированного параметра потока;
в которой первая модель коррекции служит для коррекции кажущегося состояния потока на основе кажущегося состояния потока и скорректированного параметра потока, а вторая модель коррекции служит для коррекции кажущегося параметра потока на основе кажущегося параметра потока и скорректированного состояния потока.
пропускание многокомпонентного потока текучей среды через колеблемую расходомерную трубку, соединенную с первым датчиком, и трубопровод, соединяющий указанную расходомерную трубку со вторым датчиком, причем указанный поток включает в себя первую жидкость, вторую жидкость и газ,
определение кажущегося параметра потока текучей среды на основе сигнала первого датчика,
определение кажущегося состояния потока текучей среды с использованием второго датчика, причем в процессе определения этого состояния вторым датчиком первая жидкость, вторая жидкость и газ смешаны между собой в потоке текучей среды, а также определение скорректированного параметра потока на основе кажущихся параметра и состояния потока.
первое скорректированное значение параметра потока используют для определения первого скорректированного значения состояния потока;
второе скорректированное значение состояния потока используют для определения скорректированного значения параметра потока.
первую модель коррекции, которая является особой для типа второго датчика и состояния потока и которая служит для вывода скорректированного состояния потока;
вторую модель коррекции, которая является особой для типа кажущегося параметра потока и которая служит для вывода скорректированного параметра потока;
в которой первая модель коррекции служит для коррекции кажущегося состояния потока на основе кажущегося состояния потока и скорректированного параметра потока, а вторая модель коррекции служит для коррекции кажущегося параметра потока на основе кажущегося параметра потока и скорректированного состояния потока.
Комментарии