Ультразвуковой способ измерения скорости течения (варианты) - RU2193208C2
Код документа: RU2193208C2
Чертежи
Описание
Область техники к которой относится изобретение
Изобретение относится к разработке способа измерения скорости течения
с
использованием ультразвукового луча для вычисления расхода открытого русла большой реки или промывной галереи и расхода жидкости и газа в трубе большого внутреннего диаметра.
Предпосылки создания изобретения
Основная часть современной хорошо известной ультразвуковой системы измерения расхода для большого открытого русла промывной галереи и трубы большого
внутреннего диаметра предназначена для измерения скорости течения жидкости и газа, так что эту систему обычно называют "расходомером".
Большинство систем измерения расхода предложены для измерения скорости течения с применением способа измерения скорости течения на основании разности времен распространения ультразвука.
Как показано на фиг.1, система измерения скорости течения на основании разности времен распространения ультразвука имеет следующий состав: преобразователи 1 и 2 для передачи/приема ультразвуковой волны установлены под углом α и обращены друг к другу. Переключающая схема 3 выполнена с возможностью подключения преобразователей 1 и 2 ко входам схем передачи и приема, например - ультразвукового генератора 4 импульсов и усилителя 5 принимаемого ультразвукового сигнала. Схема 6 формирования импульсов принимает усиленный сигнал и придает ему форму импульсного сигнала меньшей длительности. Устройство 7 измерения временных интервалов измеряет время распространения t1 и t2 на расстоянии L интервала от момента передачи до момента приема. Арифметико-логический блок 8 вычисляет скорость течения на основании выражения (1).
То есть, измеряется время распространения t1, в течение которого ультразвуковой луч проходит от преобразователя 1 до преобразователя 2
(как показано
на фиг.1). И наоборот, измеряется время распространения t2, в течение которого ультразвуковой луч проходит от преобразователя 2 до преобразователя 1. Эти измеряемые времена
определяют
следующим образом:
t1=L/(C+Vcosα);
t2=L/(C-Vcosα).
Получается, что разность времен распространения (Δt=t2-t1) можно представить следующим образом:
Δt=2LVcosα/C2. (1)
При этом С - скорость звука в жидкости или газе, L - интервал между
преобразователями 1 и 2,
а V - средняя скорость течения на интервале L.
Скорость течения V выводят из выражения (1) в следующем виде:
V=ΔtC2/2Lcosα.
(2)
Это можно
назвать "Способом измерения скорости течения на основании разности времен распространения", потому что скорость течения V пропорциональна разности Δt времен
распространения. Кажется, что способ
измерения скорости течения на основании разности времен распространения связан со скоростью звука, так как в выражении (2) присутствует член С2
квадрата скорости звука. Форма этого
выражения такая, будто нужно измерять член С2 квадрата скорости звука. Квадрат скорости звука представляют следующим образом:
С2
=L2/t1t2
.
Член С2 квадрата скорости звука подставляют в выражение (2), чтобы получить следующее конечное выражение для измерения скорости
течения:
V=(L2
/Lcosα)[(t2-t1)/t1•t2]=(L2/2d)[(t2-t1)/t1•t2
]. (3)
Затем скорость
течения получают путем измерения только времен t1 и t2 распространения ультразвука и вычисления выражения (3), так как L2/2d=const.
Типичные известные технические решения описаны в патенте США 5531124, выданном 2 июля 1996 г. , патенте Японии 2676321, выданном 25 июля 1998, "Руководстве по ультразвуковому измерению расхода и устройству для его осуществления" и в "Описании ультразвукового расходомера модели "ЮЭф-2100Си" (UF-2100C), изготавливаемого фирмой "Ультрафлюкс Ко." (Ultraflux Со.).
Способ измерения скорости течения на основании разности времен распространения обладает громадным преимуществом, заключающимся в простоте осуществления измерения скорости течения, что иллюстрирует выражение (3), даже несмотря на то, что скорость звука сильно изменяется в жидкости. То есть, хотя и кажется, что выражение (3) связано с квадратом скорости звука, но, согласно методу вывода выражения для измерения скорости течения, этот член в принципе не связан со скоростью течения.
Например, разность между обратными значениями времен распространения t1 и t2
получают в следующем виде:
(1/t1)-(1/t2)=2Vcosα/L.
Члены скорости звука компенсируют друг друга. Поэтому скорость течения V имеет следующий
вид:

где d = L/cosα.
В результате, полученное выражение идентично выражению (3).
Оно обладает большим преимуществом, заключающимся в том, что способ измерения скорости течения на основании разности времен распространения не связан с изменением в широких пределах скорости звука С в текучей среде. Но применение способа измерения скорости течения на основании разности времен распространения ограничено. Например, когда расстояние L распространения очень мало и/или скорость течения V очень низкая, очень трудно точно измерить скорость течения. Если L=0,1 м/с, α=45o и С≈1500 м/с, то Δt≈3,14-10-9 с.
Если собираются измерять очень малую разность времен в диапазоне погрешности 1%, абсолютная погрешность измерения разности времен не должна превышать 3-10-11 с. Измерение разности времен, основанное на подобном методологическом приеме, требует наличия относительно сложного устройства для измерения временного интервала. Кроме того, устройство для фиксации момента передачи/приема ультразвуковых импульсов должно быть очень надежным и точным. Как упоминается ниже, способ измерения скорости течения на основании разности времен распространения создает много проблем при измерении скорости течения газа в трубе или горизонтальной скорости течения в галерее или реке.
Помимо способа измерения скорости течения на основании разности времен распространения, также хорошо известен способ измерения скорости течения на основании разности фаз ультразвука. Например, есть публикация датской выложенной заявки на патент DE 19722140 от 12 ноября 1997 г. и публикация японской выложенной заявки на патент от 24 апреля 1998 г. под названием "Многоканальная система измерения расхода".
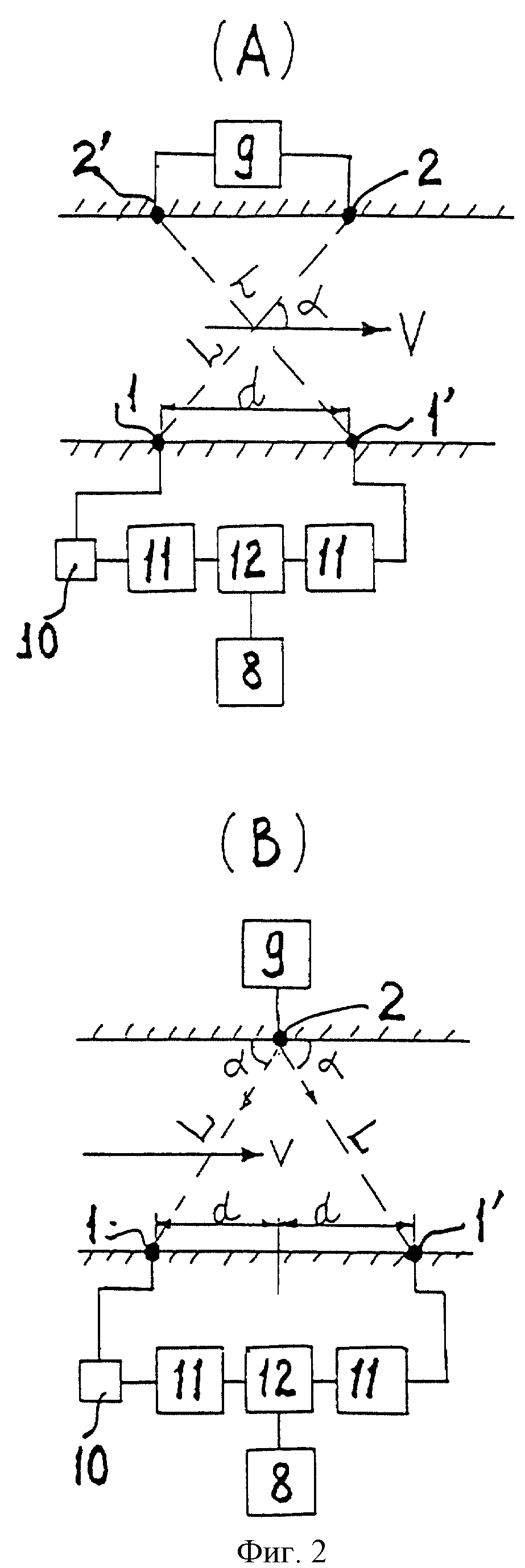
На фиг.2А и 2В показана типичная конфигурация
системы измерения скорости течения на основании
разности фаз. Ультразвуковые преобразователи 1, 1' и 2, 2' расположены так, что обращены друг к другу. Генератор 9 синусоидальной волны генерирует
синусоидальную волну, имеющую частоту f.
Фазовращатель 10 регулирует фазу принимаемых ультразвуковых сигналов. Усилитель 11 усиливает принимаемые сигналы из фазовращателя 10 и преобразователя 1'.
Дискриминатор 12 разности фаз измеряет
разность фаз между принимаемыми сигналами фаз. Во время работы генератора 9 синусоидальной волны преобразователи 2 и 2' передают ультразвуковые волны с одной и
той же фазой. В этот момент сигналы фаз,
принимаемые принимающими преобразователями 1 и 1', имеют следующий вид:
ϕ1 = 2πf•t1+ϕ0;
ϕ2 = 2π
f•t2+ϕ0,
где
t1=L/(C-Vcosα);
t2=L/(C+Vcosα),
ϕ0 - исходная фаза, с которой
сначала распространяется ультразвуковая волна. Следовательно, разность фаз Δϕ между принимаемыми сигналами имеет следующий вид:
Δϕ = ϕ1-ϕ2 = 2πfΔt = 2πf(2LVcosα/C2). (4)
Здесь скорость течения имеет следующий вид:
V =
(ΔϕC2)/(4π
fLcosα). (5)
Способ, предусматривающий определение разности фаз, имеет признаки, заключающиеся в том, что ультразвуковые волны могут
распространяться непрерывно, а разность фаз
Δϕ пропорциональна частоте f, в отличие способа, предусматривающего определение разности времен распространения. Следовательно, даже если L и
V очень малы, при выборе большей
ультразвуковой частоты разность фаз становится больше, так что измерение разности фаз осуществляется удобно и точно.
Кроме того, если значение L относительно большое, коэффициент затухания очень мал при прохождении ультразвукового импульса, так как происходит передача/прием ультразвуковых незатухающих гармонических волн. Помимо этого, даже если амплитуда принимаемого сигнала сильно пульсирует, можно обеспечить достаточное усиление принимаемого сигнала, потому что момент приема не замеряется. При таком способе можно использовать и схему автоматической регулировки усиления. Это означает, что при измерении разности фаз вообще не возникают проблемы. Но способ, предусматривающий определение разности фаз, предпочтительно используют при условии, что скорость звука С почти не изменяется, или в случае, когда какое-либо другое средство измеряет скорость звука С. Например, для измерения расхода газа, скорость звука в газе можно легко вычислить при условии, что в трубе установлены манометр и термометр.
Как упоминалось выше, большое преимущество способа, предусматривающего определение разности времен распространения ультразвука, состоит в том, что его можно использовать даже в ситуации, когда скорость звука в текучей среде значительно изменяется. Но если интервал L между преобразователями становится больше, из-за передачи/приема ультразвукового импульса возникают следующие проблемы.
Во-первых, ультразвуковой импульс имеет больший коэффициент затухания, чем синусоидальная волна, ввиду наличия в нем достаточных гармонических составляющих или обертонов. Если расстояние L распространения ультразвука становится больше, трудно принимать передаваемую ультразвуковую волну, и принимаемый импульс принимает форму звонка из-за серьезной проблемы затухания. По всем этим причинам нельзя способствовать увеличению интенсивности ультразвуковой волны, которую можно дополнительно регулировать. Если интенсивность становится больше, в реке возникает явление кавитации, так что ультразвуковая волна не распространяется. В частности, при уменьшении частоты импульса для уменьшения коэффициента затухания уменьшается и интенсивность ультразвука, что вызывает возникновение явления кавитации.
Во-вторых, ультразвуковой импульс при прохождении не затухает только на расстоянии L, а амплитуда ультразвуковой волны сильно пульсирует, вследствие чего ультразвуковая волна рассеивается и отражается из-за различных величин вихревых токов, изменения концентрации плавающих частиц, изменения температуры воды и т.д. в открытом русле промывной галереи. Иногда случается, что не происходит прием ультразвуковой волны.
При измерении скорости течения в газе коэффициент затухания ультразвукового импульса больше, чем коэффициент затухания ультразвукового импульса в жидкости. Сильное затухание и пульсация ультразвукового импульса создают много погрешностей при фиксации момента, когда приходит ультразвуковой импульс. Таким образом, погрешность измерения скорости течения увеличивается.
По этим причинам расстояние L распространения ультразвука ограничено расстоянием, на которое передают/принимают ультразвуковой импульс, а скорость течения измеряют с помощью способа, предусматривающего определение разности времен. Таким образом, возникают серьезные препятствия при измерении скорости течения в открытом русле большой промывной галереи или реки и большой трубе.
Если способ, предусматривающий определение разности фаз,
используют для измерения скорости течения,
то соответствующий коэффициент затухания уменьшается в два или три раза по сравнению с коэффициентом затухания при использовании ультразвукового импульса,
потому что происходит передача/прием
ультразвуковых незатухающих гармонических волн (синусоидальных волн). Кроме того, способ, предусматривающий определение разности фаз, не связан с пульсацией
амплитуды, так как он не связан с фиксацией
момента, когда приходит ультразвуковой импульс, а предусматривает измерение разности фаз между двумя синусоидальными волнами. Все же, использование способа,
предусматривающего определение разности фаз,
ограничено. Если разность фаз Δϕ между двумя синусоидальными волнами равна nπ+β, обычное устройство для измерения разности
фаз не может определить n (1, 2, 3...). Если
расстояние L распространения ультразвука или скорость V течения увеличивается, Δϕ становится больше, чем π. Например, если собираются
измерять расход газа в трубе, имеющей
внутренний диаметр Ф, равный 300 мм, определяемая в некотором поперечном сечении средняя скорость течения V газа, как правило, составляет 10~30 м/с. Далее, в
предположении, что скорость звука С
составляет 400 м/с, ультразвуковая частота выбрана на уровне 400 кГц, чтобы обеспечить выход за полосу частот шумов, а угол α составляет 45o,
изменяющийся диапазон разности фаз
Δϕ таков:
Δϕ=9,42~28,26 рад≈(2π+0,998π)~(8π+0,995π).
То есть, Δ
ϕ>π.
Если
L=10 м, V=3 м/с, f=200 кГц и С=1500 м/с в относительно малом открытом русле, разность фаз Δϕ такова:
Δϕ≈16,746
рад=5π+0,33π>π
.
Таким образом, способ, предусматривающий определение разности фаз, нельзя использовать при измерении скорости течения в относительно малом
открытом русле. Иными словами, способ,
предусматривающий определение разности времен распространения, обладает преимуществом при использовании в ситуации, когда скорость звука изменяется в широких
пределах. Но он имеет тот недостаток, что
если интервал L, на котором измеряют скорость течения, увеличивается, ультразвуковой импульс становится неустойчивым, так как этот ультразвуковой импульс,
как правило, затухает из-за его собственных
свойств при передаче/приеме.
Способ, предусматривающий определение разности фаз, обладает преимуществами, заключающимися в том, что коэффициент затухания относительно мал и легко обрабатывать принимаемый сигнал, так как происходит передача/прием синусоидальной волны. Но если разность фаз превышает π радиан, вследствие чего интервал L и скорость течения V становятся больше или скорость звука становится меньше, невозможно проводить измерение скорости течения на основании способа, предусматривающего определение разности фаз. Кроме того, способ, предусматривающий определение разности фаз, имеет тот недостаток, что нужно отдельно измерять скорость звука.
Задача изобретения состоит в том, чтобы разработать ультразвуковой способ измерения скорости течения, предназначенный для измерения скорости течения на основании способа, предусматривающего определение разности времен распространения для измерения скорости течения, и способа, предусматривающего определение разности фаз, плавно, если интервал L, на котором измеряют скорость течения, относительно велик, например - если горизонтальную среднюю скорость течения измеряют в открытом русле промывной галереи или в реке.
Другая задача изобретения состоит в том, чтобы разработать ультразвуковой способ измерения скорости течения, предназначенный для измерения скорости течения на основании ультразвукового способа, предусматривающего определение разности времен распространения для измерения скорости течения, и способа, предусматривающего определение разности фаз, плавно, если интервал L измерения горизонтальной средней скорости течения относительно велик, например - если скорость течения газа измеряют в трубе относительно большого внутреннего диаметра.
Еще одна задача изобретения состоит в том, чтобы разработать ультразвуковой способ измерения скорости течения, предназначенный для измерения скорости течения на основании ультразвукового способа, предусматривающего определение разности времен распространения для измерения скорости течения, и способа, предусматривающего определение разности фаз, плавно, если измеряют скорость течения газа или жидкости в трубе относительно большого внутреннего диаметра.
И еще одна задача изобретения состоит в том, чтобы разработать ультразвуковой способ измерения скорости течения, предназначенный для измерения скорости течения на основании ультразвукового способа, предусматривающего определение разности времен распространения для измерения скорости течения, и способа, предусматривающего определение разности фаз, плавно, если скорость течения относительно велика, а скорость звука относительно мала.
Краткое изложение сущности изобретения
Согласно изобретению, ультразвуковой способ измерения скорости течения, основанный на способе, предусматривающем определение разности времен
распространения, предназначенном для измерения скорости
течения без передачи/приема ультразвукового импульса, включает этапы, на которых осуществляют амплитудную модуляцию несущей незатухающей
гармонической ультразвуковой синусоидальной волны в меньшую
частоту и передают амплитудно-модулированные сигналы всякий раз при измерении времени распространения ультразвука, осуществляют демодуляцию
принимаемых сигналов, осуществляют обнаружение или
дискриминацию амплитудно-модулированного сигнала и измеряют временной интервал между моментами амплитудной модуляции распространяемой волны и
демодуляции принимаемого амплитудно-модулированного
сигнала.
Ультразвуковой способ измерения скорости течения, основанный на способе, предусматривающем определение разности фаз, не зависящем от скорости звука, включает этапы, на которых осуществляют амплитудную модуляцию ультразвуковой волны в меньшую частоту, если разность фаз между ультразвуковыми волнами, передаваемыми в направлении, противоположном скорости течения, превышает π радиан, выходя за диапазон измерения обычного дискриминатора разности фаз, и становится равной mπ+β, и осуществляют передачу/прием амплитудно-модулированного сигнала, измеряют разности фаз между амплитудно-модулированными сигналами и между переносимыми ультразвуковыми волнами и получают m, и обеспечивают очень точное измерение разности фаз между переносимыми ультразвуковыми волнами.
Краткое описание чертежей
Теперь изобретение будет подробно описано со ссылками на прилагаемые
чертежи, где
фиг. 1 изображает условную блок-схему,
иллюстрирующую систему для измерения скорости течения на основании разности времен распространения ультразвука в соответствии с известным
уровнем техники,
фиг. 2А и 2В изображают условную
блок-схему, иллюстрирующую систему для измерения скорости течения на основании разности фаз ультразвука в соответствии с известным уровнем
техники,
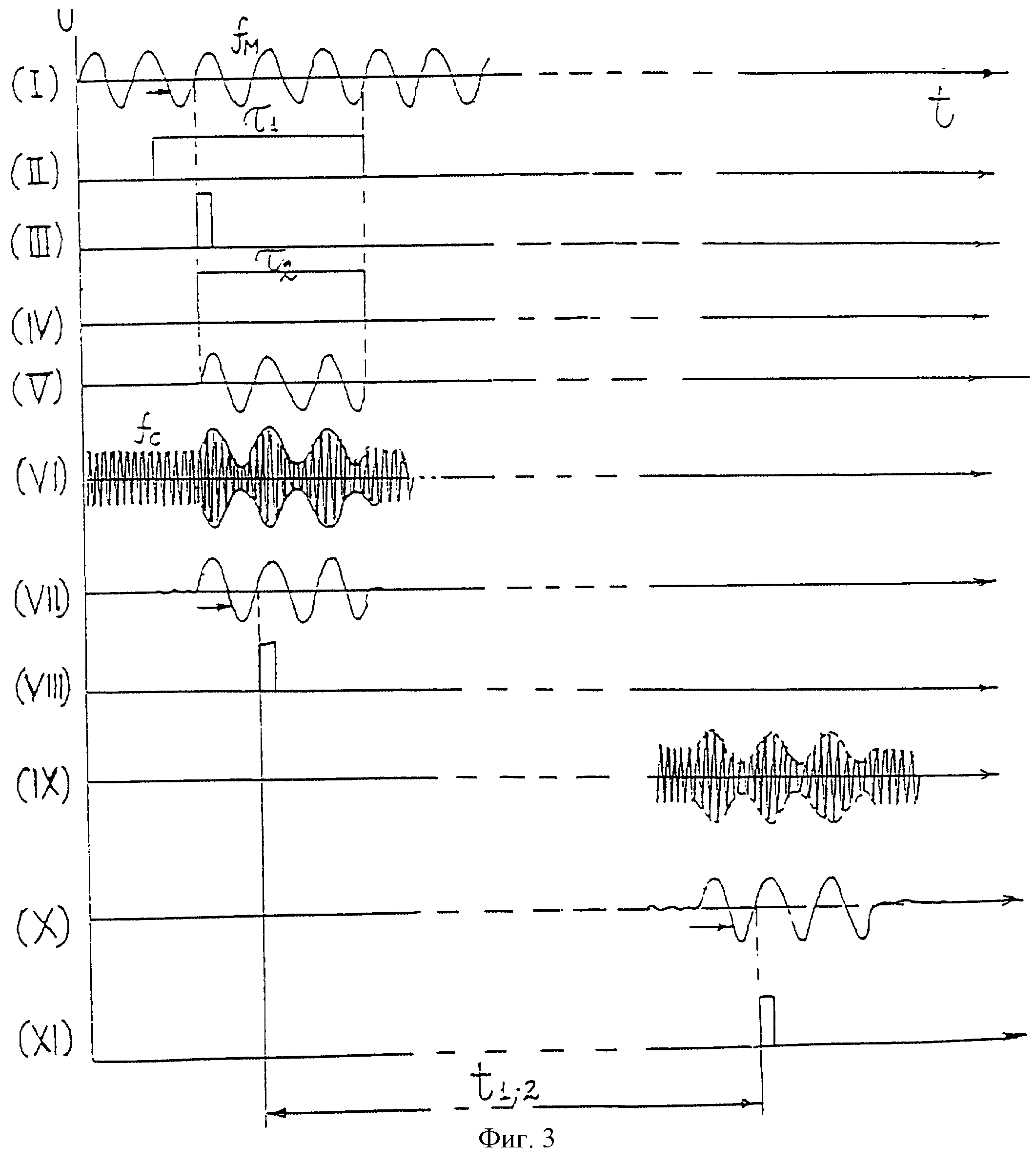
фиг. 3 изображает временную диаграмму,
иллюстрирующую обработку согласно способу измерения скорости течения на основании разности времен распространения ультразвука в соответствии с
изобретением,
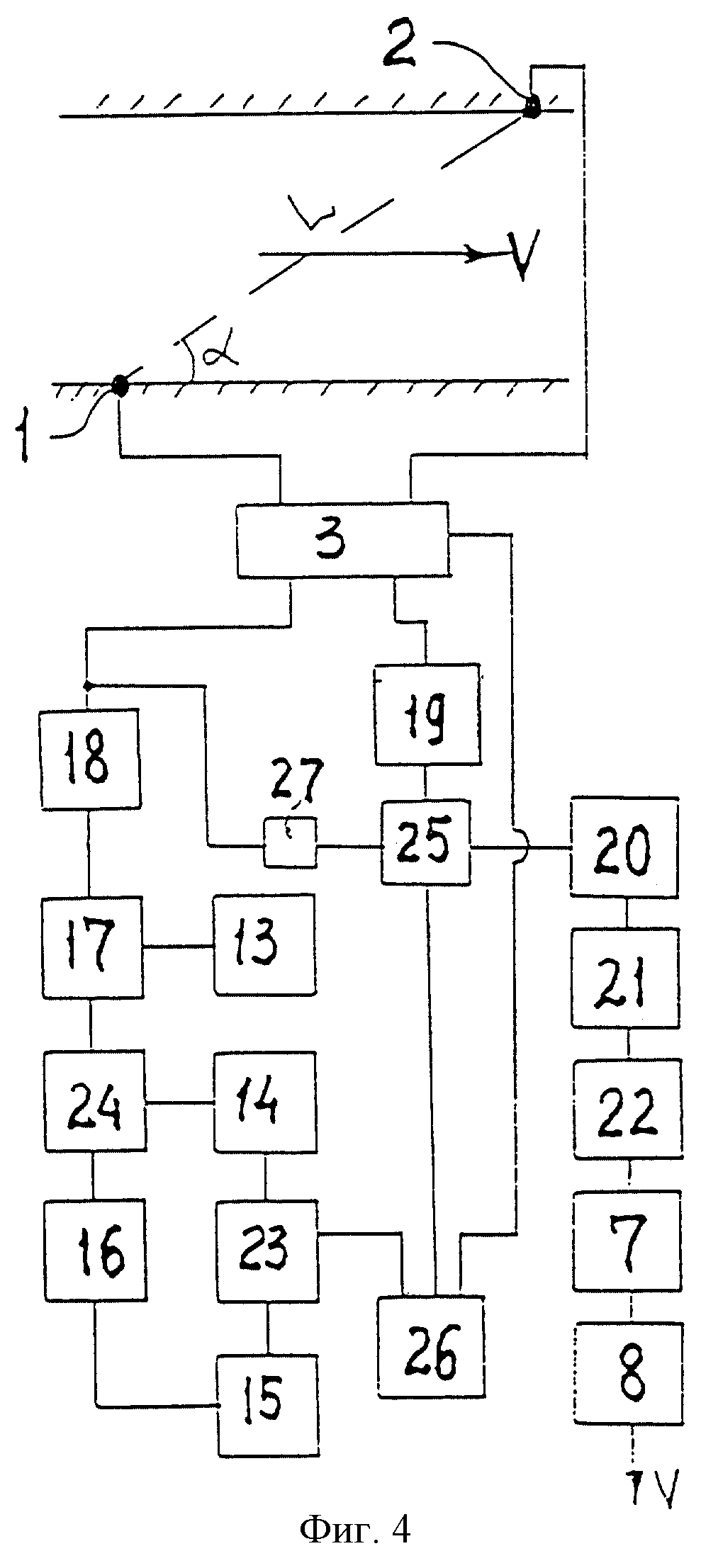
фиг. 4 изображает условную
блок-схему, иллюстрирующую систему для измерения скорости течения на основании разности времен распространения ультразвука в соответствии с
изобретением,
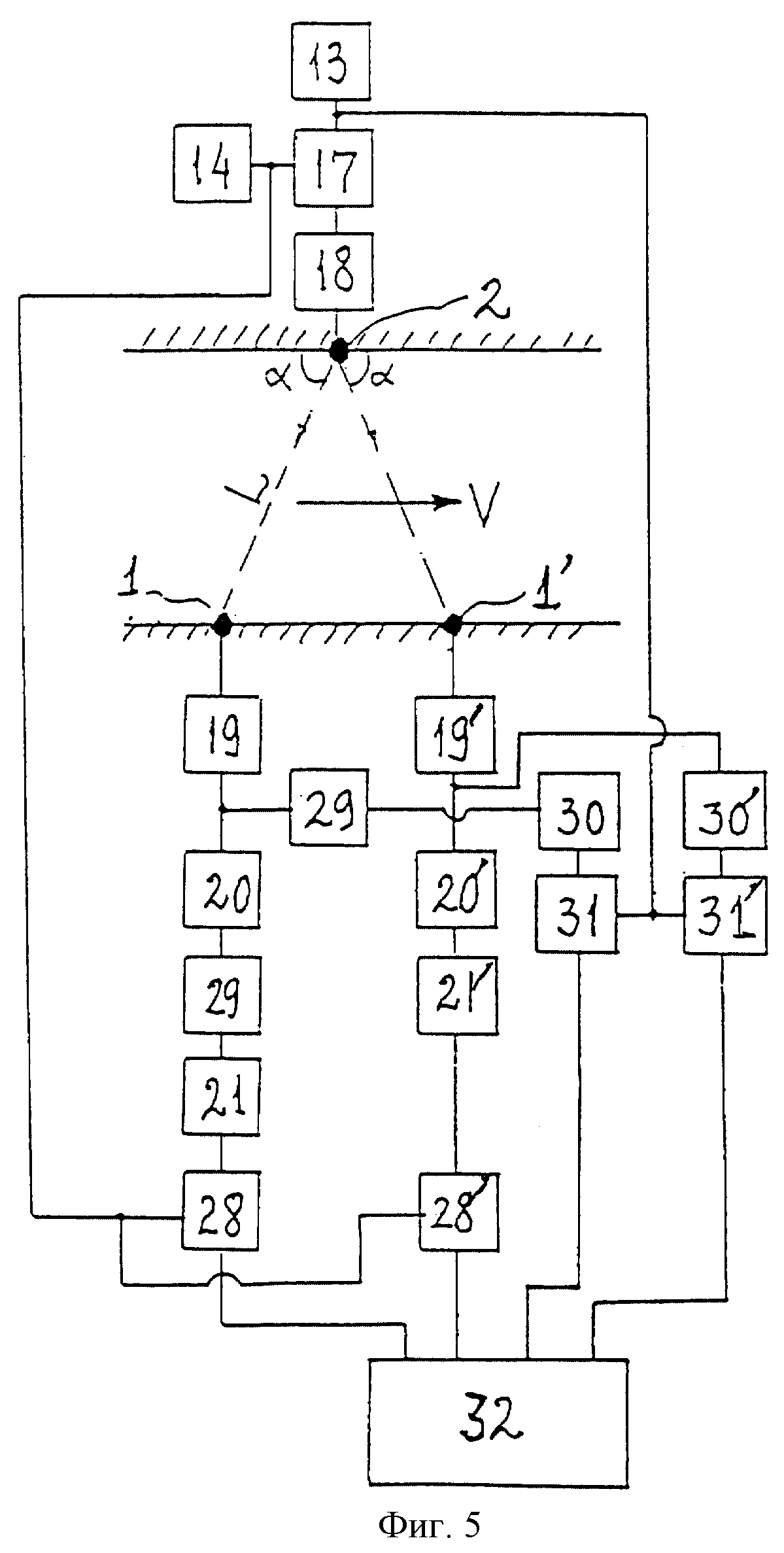
фиг. 5 изображает условную блок-схему,
иллюстрирующую систему для измерения скорости течения на основании разности фаз ультразвука в соответствии с изобретением,
фиг.
6 изображает условную блок-схему, иллюстрирующую систему для
измерения скорости течения на основании разности фаз ультразвука в соответствии с другим конкретным вариантом осуществления
изобретения.
Подробное описание изобретения
Сначала,
со ссылками на прилагаемые чертежи, будет приведено подробное пояснение способа измерения скорости течения на основании
разности времен распространения ультразвука в соответствии с изобретением.
Фиг. 3 изображает временную диаграмму последовательности действий, иллюстрирующую способ измерения скорости течения. Известно, что частоту fс ультразвуковой несущей обычно выбирают с учетом полосы частот шума, создаваемого в потоке текучей среды, надежности применительно к диаграмме направленности ультразвукового преобразователя, коэффициента затухания ультразвука в текучей среде, и т.д.
При измерении скорости течения осуществляют амплитудную модуляцию выбранной ультразвуковой несущей fс (фиг.3, VI) в частоту fм (фиг.3, I), которая меньше, чем частота fс, в течение периода τ2 (фиг.3, V), а затем распространение в направлении, совпадающем со скоростью течения или противоположном ей. И, считая предварительно определенный момент амплитудной модуляции исходной точкой, измеряют время от исходной точки до назначенного момента частоты или сигнала fм амплитудной модуляции при распространении/приеме амплитудно-модулированной ультразвуковой волны на постоянном интервале L, и демодулируют принимаемый сигнал. Время определяют в виде времен t1 и t2 распространения ультразвука, распространяемого в направлении, совпадающем со скоростью течения или противоположном ей. Иными словами, амплитудно-модулированная ультразвуковая волна действует как сигнал метки для измерения времени распространения ультразвуковой волны. А поскольку ультразвуковая волна является видом синусоидальной волны, которая непрерывно распространяется и подвергается амплитудной модуляции в течение постоянного временного интервала для измерения скорости течения, полоса ультразвуковых частот составляет fс±fм и является значительно более узкой, чем полоса частот более короткого ультразвукового импульса, так что коэффициент затухания этой волны становится меньше. И даже в случае, если коэффициент затухания претерпевает слишком малые изменения, обработка принимаемого сигнала проста и не влияет на измерение времени распространения.
Но если осуществляют амплитудную модуляцию волны fс ультразвуковой несущей в сигнал fм амплитудной модуляции, нужно осуществлять амплитудную модуляцию с той же фазой, что и фаза сигнала fм амплитудной модуляции, например - с нулевой фазой, как показано на фиг.3, V. При подаче амплитудно-модулированного напряжения на ультразвуковой преобразователь, ультразвуковая волна некоторого типа, эквивалентная подаваемому напряжению, не распространяется, а происходит искажение формы первого полупериода модулированной ультразвуковой волны. Более того, сигнал, получаемый путем приема/демодуляции амплитудно-модулированной ультразвуковой волны, не соответствует форме сигнала fм амплитудной модуляции. С учетом этих особенностей, амплитудно-модулированный сигнал, подаваемый на ультразвуковой преобразователь, вводят в демодулятор для демодуляции и детектируют сигнал fм амплитудной модуляции из сигнала демодуляции и фиксируют момент, когда первый период сигнала модуляции проходит через нулевой потенциал, используя схему дискриминации пересечения нулевого уровня. Здесь нужно отметить, что зафиксированный момент считают начальной точкой для измерения времени распространения ультразвука, как показано на фиг.3, VII и VIII.
Аналогично этому, принимаемый амплитудно-модулированный сигнал тоже демодулируют с помощью демодулятора, как подчеркивалось выше, детектируют сигнал fм амплитудной модуляции из сигнала демодуляции, а затем фиксируют момент, когда первый период сигнала модуляции проходит через точку пересечения нулевого уровня, выполняя функцию сигнала конца временного интервала, как показано на фиг.3, Х и XI.
Как описано выше, точность измерения времени распространения ультразвука можно значительно повысить, в результате чего только один демодулятор демодулирует передаваемые/принимаемые сигналы, а моменты, когда первый период сигнала демодуляции проходит через точку пересечения нулевого уровня, используют в качестве сигналов начала и конца измерения временного интервала.
Как показано на фиг.3, VIII и XI, неуместно использовать моменты, когда полтора периода сигнала fм амплитудной модуляции, а не первый полупериод, проходят через точку пересечения нулевого уровня в качестве сигналов начала и конца временного интервала. Конечно, в демодуляторе, усилителе, схеме пересечения нулевого уровня и т.д. возникает время задержки, но не обязательно компенсировать это время задержки, так как в системе возникает одинаковое время задержки всякий раз при измерении скорости течения.
И поэтому сигнал fм амплитудной модуляции нужно фиксировать при следующих условиях.
Первое условие состоит в том, что сигнал fм амплитудной модуляции значительно больше, чем частота fp пульсации затухания, например, fм>>fp. Ультразвуковая волна имеет коэффициент затухания, изменяющийся из-за многих факторов во время распространения в текучей среде. Факт изменения коэффициента затухания используется для того, чтобы сделать ультразвуковую волну амплитудно-модулированной. Таким образом, частота fм амплитудной модуляции должна быть больше, чем частота fp пульсации затухания, с которой пульсирует коэффициент затухания и которая не является частотой шума, генерируемого в текучей среде. Частота fp пульсации затухания невелика и обычно не превышает 100 Гц.
Второе условие состоит в том, что период несущей должен содержаться более 20 раз в периоде амплитудной модуляции, например, fм≤fc/20. Это условие касается амплитудной модуляции несущей fc, при которой фаза несущей fc в начальной точке амплитудной модуляции не всегда одинакова даже при осуществлении амплитудной модуляции несущей fc в точке пересечения нулевого уровня, как показано на фиг.3, V. Поэтому амплитудно-модулированная ультразвуковая волна способствует возникновению переходных явлений и искажает сигнал в интервале первой четверти периода сигнала fм амплитудной модуляции. Для предотвращения продолжения искаженной части волны свыше четверти периода, несущая fc должна включать в себя, по меньшей мере, пять периодов в первой четверти периода сигнала fм амплитудной модуляции. Таким образом, сигнал несущей fc должен появляться более 20(=4•5) раз в одном периоде сигнала fм амплитудной модуляции. Кроме того, предпочтительно, чтобы частота несущей fc была больше, чем частота сигнала fм амплитудной модуляции, чтобы отфильтровывать сигнал fм амплитудной модуляции от частоты пульсации несущей fc.
Третье условие состоит в том, что непрерывное время амплитудно-модулированных сигналов, желательно, превышает, по меньшей мере, пять периодов сигнала fм амплитудной модуляции (5/fм), если амплитудно-модулированный сигнал демодулируют для детектирования сигнала fм амплитудной модуляции. Если демодулируют амплитудно-модулированный сигнал, имеющий период амплитудной модуляции, повторяющийся два или три раза, то выходной сигнал демодулятора искажается.
Четвертое условие состоит в том, что если осуществляют циклическое
распространение/прием ультразвуковой волны в направлении, совпадающем со скоростью течения или
противоположном ей, желательно, чтобы непрерывное время амплитудно-модулированной ультразвуковой волны не
превышало половины времени распространения ультразвука. Можно привести следующий пример:
5/fм≤L/[2(C+v)],
fм≥[10(C+v)]/L.
Как
описано выше, сигнал fм амплитудной модуляции, удовлетворяющий четырем условиям,
выбирают с помощью следующего выражения:
fp<<10[(Cmax+vmax)/L]≤fм≤0,05fc, (6)
где Сmax
- ожидаемая максимальная скорость звука в текучей среде, a Vmax(=Vmaxcosα)
- максимальное измеряемое значение скорости течения.
При выборе сигнала fм амплитудной модуляции, удовлетворяющего выражению (6), предпочтительно выбирать относительно как
можно меньшую частоту, так как при быстром изменении напряжения, подаваемого на ультразвуковой
преобразователь, возникают переходные явления. Желательно, чтобы коэффициент модуляции m не превышал 50%.
Согласно экспериментам, весьма целесообразен коэффициент модуляции m 25~30%. Коэффициент
затухания ультразвука пульсирует с меньшей частотой fp, коэффициент изменения которой обычно
составляет около 50%. Таким образом, есть риск отсечки амплитудно-модулированной волны.
Например, предположим, что L= 10 м, α= 45o, Cmax=1500 м/с, fc=500 кГц,
fp<<1507
Фиг. 4 изображает условную блок-схему, иллюстрирующую конфигурацию системы в соответствии с одним конкретным вариантом осуществления изобретения для реализации способа измерения скорости течения, описанного выше.
Ультразвуковые преобразователи 1 и 2 соединены со схемой 3 переключения преобразователей, переключаемой в состояние передачи или приема. Выходной усилитель 18 возбуждает ультразвуковой преобразователь 1 или 2. Принимающий усилитель 19 усиливает сигналы от ультразвукового преобразователя 1 или 2, причем этот усилитель является узкополосным усилителем, который выполняет функцию автоматической регулировки усиления (АРУ) и усиливает только полосу частот сигнала амплитудной модуляции.
Амплитудный модулятор 17 осуществляет амплитудную модуляцию сигнала fc ультразвуковой несущей. Генератор 13 несущей генерирует сигнал fc ультразвуковой несущей. Генератор 14 модуляции генерирует сигнал fм модуляции, меньший, чем сигнал fс ультразвуковой несущей. Здесь нужно отметить, что и генератор 13 несущей, и генератор 14 модуляции являются генераторами синусоидальной волны. Демодулятор 20 демодулирует амплитудно-модулированный сигнал для детектирования частоты fм модуляции. Узкополосный усилитель 21 является узкополосным усилителем, который усиливает сигнал fм модуляции. Схема 22 пересечения нулевого уровня выдает прямоугольный импульс, когда первый период выходного сигнала fм из узкополосного усилителя 21 проходит через нулевой уровень. Устройство 7 для измерения временного интервала измеряет временной интервал между двумя импульсами. Арифметико-логический блок 8 вычисляет скорость течения на основании выражения для измерения скорости течения по разности времен распространения ультразвука. Переключающая схема 23 обеспечивает прохождение через нее выходного сигнала частоты fм модуляции на заданном временном интервале. Схема 15 пересечения нулевого уровня генерирует прямоугольный импульс, когда первый - один период сигнал fм модуляции проходит через нулевой уровень. Моностабильный мультивибратор 16 приводится в действие схемой 15 пересечения нулевого уровня для генерирования импульса заданной длительности.
Переключающая схема 24 переключается импульсом моностабильного мультивибратора 16 для обеспечения подачи выходного сигнала генератора 14 модуляции на амплитудный модулятор 17. Переключающая схема 25 обеспечивает подачу ультразвукового модулированного выходного сигнала на демодулятор 20, а затем переключается, чтобы обеспечить ввод выходного сигнала из принимающего усилителя 19 в амплитудный модулятор 20. Аттенюатор 27 напряжения регулирует выходное напряжение выходного усилителя 18. Контроллер 26 переключающих схем управляет переключающими схемами 3, 23 и 25.
Ниже, со ссылками на фиг.3, приводится подробное пояснение работы ультразвуковой системы для измерения скорости, изображенной на фиг.4.
Генератор 13 несущей и генератор 14 модуляции сначала возбуждаются для генерирования синусоидальных волн частоты fс ультразвуковой несущей и частоты fм модуляции, соответственно, как показано на фиг.3, VI и I. Когда достигнут момент измерения скорости течения, контроллер 26 переключающих схем подает прямоугольный импульс длительности τ1/ (см. фиг.3, II) на переключающую схему 23. Переключающая схема 23 обеспечивает ввод сигнала частоты fм модуляции из генератора 14 модуляции в схему 15 пересечения нулевого уровня. После этого, когда уровень рабочего потенциала схемы 15 пересечения нулевого уровня устанавливается на низком уровне "-", схема 15 пересечения нулевого уровня генерирует прямоугольный импульс (см. фиг.3, III), когда первый полупериод выходного сигнала из генератора 14 модуляции проходит через нулевой уровень (U=0). Этот прямоугольный импульс вводится в моностабильный мультивибратор 16, и моностабильный мультивибратор 16 генерирует прямоугольный импульс длительности τ2 (см. фиг.3, IV). Переключающая схема 24 переключается прямоугольным импульсом длительности τ2 для обеспечения ввода сигнала частоты fм модуляции из генератора 14 модуляции в амплитудный модулятор 17. Таким образом, сигнал частоты fc ультразвуковой несущей подвергается амплитудной модуляции в течение времени τ2, как показано на фиг.3, VI. Аналогично, частота fc ультразвуковой несущей всегда предполагается подвергнутой амплитудной модуляции в одну и ту же фазу частоты fм модуляции.
Амплитудно-модулированный сигнал из амплитудного модулятора 17 усиливается выходным усилителем 18, а затем подается на ультразвуковой датчик 1. Ультразвуковой датчик 1 распространяет амплитудно-модулированную ультразвуковую волну через текучую среду к преобразователю 2.
В то же время выходной сигнал выходного усилителя 18 вводится через аттенюатор 27 напряжения и переключающую схему 24 в демодулятор 20 для детектирования сигнала fм модуляции (фиг. 3, VII). Узкополосный усилитель 21 усиливает сигнал модуляции, демодулированный демодулятором 20, и подает усиленный сигнал на схему 22 пересечения нулевого уровня. Схема 22 пересечения нулевого уровня генерирует более короткий прямоугольный импульс (фиг.3, VIII) в момент, когда первый полупериод "-" сигнала fм модуляции проходит через нулевой уровень. Этот более короткий прямоугольный импульс вводится в устройство 7 для измерения временного интервала, выполняя функцию сигнала начала измерения времени.
После этого переключающая схема 25 отсекает вход в аттенюатор 27 и вынуждает подачу выходного сигнала из принимающего усилителя 19 на демодулятор 20. Иными словами, амплитудно-модулированная ультразвуковая волна, которую излучает и распространяет преобразователь 1 на интервале L, принимается преобразователем 2 и усиливается принимающим усилителем 19. Выходной сигнал (фиг. 3, IX) из принимающего усилителя 19 подается через демодулятор 20 и усилитель 21 на схему 22 пересечения нулевого уровня. Схема 22 пересечения нулевого уровня генерирует более короткий прямоугольный импульс (фиг.3, XI) и подает его на устройство 7 для измерения временного интервала, где он выполняет функцию сигнала конца измерения времени.
Затем устройство 7 для измерения временного интервала измеряет временной интервал t1 между первым и вторым прямоугольными импульсами из схемы 22 пересечения нулевого уровня. По окончании измерения временного интервала t1, схема 3 переключения преобразователей переключается для соединения преобразователя 2 с выходным усилителем 18. Затем переключающая схема 25 соединяется с аттенюатором 27, а переключающая схема 23 снова переключается. Последующие операции повторяются аналогично тем, которые осуществляются при измерении временного интервала t1. Следовательно, время t2 измеряется в течение периода распространения амплитудно-модулированной ультразвуковой волны от преобразователя 2 и ее приема преобразователем 1.
Временные интервалы t1 и t2 вводятся в арифметико-логический блок 8 скорости течения для вычисления скорости течения на основании выражения (3) для измерения скорости течения. Арифметико-логический блок 8 скорости течения выдает сигнал, соответствующий скорости течения V. Выходной сигнал скорости течения V выдается в арифметико-логический блок измерения расхода (не показан), если система является системой для измерения расхода.
Здесь есть следующие важные аспекты: система имеет особенности, согласно которым, чтобы измерить временные интервалы t1 и t2, амплитудно-модулированный выходной сигнал, вводимый в преобразователь 1 (или 2), и сигнал, принимаемый преобразователем 2 (или 1), пропускают через один демодулятор и схему пересечения нулевого уровня, а импульсам начала и конца, вводимым в устройство 7 для измерения временного интервала, придают форму прямоугольного импульса.
Выражение (5), хорошо известное в качестве выражения для измерения скорости течения на основании разности фаз, зависит от квадрата скорости звука. С2. В выражении (5) Δ ϕ также является разностью фаз между ультразвуковыми волнами, распространяемыми в направлениях, совпадающих со скоростью течения и противоположных ей. Помимо способа измерения скорости течения, соответствующего выражению (5), можно вывести выражение для измерения скорости течения на основании разности фаз, которое не зависит от скорости звука С.
Разность фаз Δψ1 между
ультразвуковой распространяемой волной и принимаемой волной после распространения в направлении скорости течения и разность фаз Δψ2 между ультразвуковым
распространяемым
сигналом и принимаемым сигналом после распространения в направлении, противоположном скорости течения, имеют следующий вид:
Δψ1 = 2πf[L/(C+v)],
(7-a)
Δψ2 = 2πf[L/(C-v)], (7-b)
где v=Vcosα, а L - интервал между ультразвуковыми преобразователями.
Разность между
обратными числами
разностей фаз Δψ1 и Δψ2 имеет следующий вид:
(1/Δψ1)-(1/Δψ2) =
(2Vcosα)/(2π
fL). (8)
При этом V имеет следующий вид:
V = [πfL/cosα][(1/Δψ1)-(1/Δψ2)]. (9)
Этот способ измерения
скорости течения используется с большой выгодой, поскольку необязательно измерять скорость звука отдельно, даже при условии, что скорость звука претерпевает значительные
изменения. Но измерять
скорость течения на основании выражения (9) можно только в случае, если погрешность разностей фаз Δψ1 и Δψ2 очень мала
- настолько, что ее можно
игнорировать.
Например, Δψ1 = 2,0 рад и Δψ2 = 2,2 рад. В предположении, что разности фаз измеряют в
диапазоне погрешности 0,5%,
измеренные разности фаз имеют следующие значения:


В результате,

Но фактическое значение таково:
(1/2,0)-(1/2,2)=0,0454545.
Поэтому погрешность имеет следующее значение:
(0,0406828-0,04545)/0,04545=-0,105=10,5%.
То есть, разности фаз измерены в диапазоне погрешности 0,5%, но погрешность между разностями величин, обратных разностям фаз, выросла более чем в 20 раз. Таким образом, погрешность измерения скорости течения могла стать больше 10%. Чтобы реализовать способ измерения скорости течения на основании разности фаз, не зависящий от скорости звука С, нужно очень точно измерять разность фаз.
Это создает следующую проблему, вытекающую из выражения (7). При увеличении интервала L скорость звука С уменьшается, а ультразвуковая частота увеличивается, так что разность фаз Δψ1,2 становится намного больше, чем π. Конечно, если L, С и v заданы, то можно выбрать ультразвуковую частоту f так, чтобы разность фаз Δψ не превышала диапазон π измерения обычного дискриминатора разности фаз, но эта частота должна быть гораздо больше, чем полоса частот шума, генерируемого в текучей среде.
Например,
предположим, что внутренний диаметр D
трубы для природного газа равен 0,3 м, С=420 м/с, V=30 м/с, α=45o и L =0,425 м, тогда ультразвуковая частота f, которая не превышает разность
фаз π, имеет следующее
значение:
f≤(C+Vcosα)/2πL=(420+30•cos45o)/(2π•0,424)=165,6 Гц.
Подобная полоса частот входит в полосу частот шума. Кроме того, это делает невозможным изготовление компактного преобразователя, который распространяет звуковую волну частоты 165 Гц.
Чтобы выйти за полосу шума,
если частота fc
выбрана равной 40 кГц, разность фаз в указанных примерах должна иметь следующие значения:

Отметим здесь, что 768π нельзя измерить с помощью обычного дискриминатора разности фаз.
Чтобы решить эти проблемы, в изобретении ультразвуковая частота fc, выходящая далеко за полосу шума, рассматривается в качестве несущей, и обеспечивается ее амплитудная модуляция в частоту fм, меньшую, чем ультразвуковая частота fc, а также распространение ее в направлениях, совпадающих со скоростью течения и противоположных ей, а также измерение разностей фаз между распространяемым сигналом и принимаемым сигналом следующим образом.
Во-первых, выбирают частоту fм амплитудной модуляции так, что разности фаз Δψм1 и Δψм2 между распространяемой волной
амплитудно-модулированного сигнала и принимаемыми и демодулируемыми сигналами после распространения в направлениях, совпадающих со скоростью течения и
противоположных ей, удовлетворяют следующим
условиям:
Δψм1 = 2πfм[L/(Cmax+vmax)] = nπ+bπ, (10-a)
Δψм2 = 2πfм[L/(Cmin-vmax)] = nπ+aπ, (10-b)
где n= const (1, 2, 3,...), а<1,0, b<1,0, Сmax и Cmin - максимальная и
минимальная скорости звука в текучей среде, и vmax=Vmaxcosα - максимальный диапазон измерения скорости течения.
В этом случае, поскольку nπ известно заранее, предполагается измерение разности фаз Δψм1 и Δψм2 только в случае, если измеряют aπ и bπ, а затем прибавляют к ним nπ. Здесь аπ - максимальный предел измерения, а bπ - наименьший предел измерения. Поскольку имеет место неустойчивость, если а=1 и b=0, желательно выбирать а равным 0,96 и выбирать b равным 0,2.
n, которое удовлетворяет выражению (10), определяют следующим образом.
Задают следующее выражение для
отношений, исходя из выражения (10):
(n+b)/(n+a)=(Cmin-vmax)/(Cmax+vmax).
При этом получают такое n:
n=[a(Cmin
-vmax)-b(Cmax
+vmax)]/((Cmax-Cmin+2vmax). (11)
На основании полученного таким образом n, частоту fм модуляции
определяют следующим образом:
fм=[(n+a)/2L](Cmin-vmax) (12-a)
или
fм=[(n+b)/2L](Cmax+vmax). (12-B)
Следовательно, несущую fc
подвергают амплитудной модуляции в выбранную частоту fм модуляции, и распространяют/принимают амплитудно-модулированный сигнал. Если разности фаз
Δψм1 и Δ
ψм2 между частотами fм модуляции измеряют в диапазоне постоянной погрешности δм, результаты вычисления разностей
фаз Δψм1 и
Δψм2 представляют в следующем виде:


где aπ = Δψмм1 и bπ = Δψмм2 представляют собой разность фаз, которую может измерить дискриминатор разности фаз. Умножая разность фаз на fc/πfм, получают значение, которое разделяет разности фаз Δψc1 и Δ ψc2 между несущими в π.


где β<1,0, γ<1,0, a m1 и m2 - целые числа (1, 2, 3, 4, ...).
Если разности
фаз Δψс1 и Δψс2 измеряют, как описано выше, то видно, что получаются значения m1π+β
π и m2π+γ
π.
Значения, которые измеряет дискриминатор, представляют собой следующие разности фаз между несущими:


Если прибавляют m1π и m2π к измеренным значениям, разности между фазой при распространении волны несущей и фазой принимаемого сигнала после распространения в направлениях, совпадающих со скоростью течения и противоположных ей, имеют следующий вид:


Разности фаз


Если разность фаз несущих измеряют согласно вышеописанному способу, погрешность измерения уменьшается в десятки или сотни раз по сравнению с погрешностью δc дискриминатора разности фаз.


где m1 и m2>>1, β и γ<1,0. Таким образом, δΔψc1 и δΔ ψc2 значительно меньше, чем δc.
Как описано выше, согласно изобретению, поскольку разность фаз точно измеряют во время распространения и приема ультразвуковой волны, можно измерять скорость течения на основании выражения для измерения скорости течения по разности фаз, которое не зависит от скорости звука. Кроме того, даже если L и V увеличиваются, а С уменьшается и разность фаз между ультразвуковыми волнами значительно превышает π радиан, можно точно измерить скорость.
Например, при измерении скорости течения природного газа,
протекающего
в трубе, имеющей внутренний диаметр 300 мм, предполагается, что Cmin=420 м/с, Сmax=450 м/с, L=0,425 м, Vmaxcosα=30 м/с, а частота fc
ультразвуковой
несущей выбрана равной 40 кГц с учетом шума в трубе. Предположим, что диапазон измерения дискриминатора разности фаз выбран в пределах 0~π, bπ=0,2π, например, b= 0,
2, когда
разность фаз становится минимальной, и аπ=0,95π, например, а=0,95, когда разность фаз становится максимальной в диапазоне. Тогда частота fм модуляции будет иметь
следующее
значение:
n=[0,95(420-30)-0,2(450+30)]/(450-420+2•30)=3,05.
В предположении, что n выбрано равным 3 и хранится в запоминающем устройстве системы, имеем:
f≤[(3,05+0,95)/2•0,424](420-30)=1839,62 Гц.
Предположим, что fм выбрана равной 1830 Гц, при распространении ультразвуковой волны,
амплитудно-модулированной на
уровне сигнала fм амплитудной модуляции 1830 Гц в направлениях, совпадающих со скоростью течения и противоположных ей, а принимаемый сигнал демодулируется для
детектирования сигнала fм амплитудной модуляции. Тогда, если измеряют разность фаз между фазой сигнала fм амплитудной модуляции распространяющей стороны и фазой принимаемого
сигнала, то результаты будут
следующими:

Δψм2 = 2πfм[L/(C-v)] = 3π+0, 60893π (n = 3).
При этом известно, что разность фаз, которую может измерять дискриминатор, составляет 0,30178π или 0,60893π. В предположении, что измерение разностей фаз осуществляется с погрешностью измерения в диапазоне ±1%, вычисляемая разность фаз имеет следующее значение:


Следующая процедура такова:

Здесь нужно отметить, что m1 (=72) сохраняется в запоминающем устройстве системы.

Здесь нужно отметить, что m2 (=78) сохраняется в запоминающем устройстве системы.
Фактическая разность фаз между несущими имеет следующее значение:
При этом видно, что m1 (=72) совпало с сохраненным значением, а разность фаз Δψcм1 между несущими, которую можно измерить непосредственно, равна 0,17021276.

При этом видно, что m2 (=78) совпало с сохраненным значением, а разность фаз Δψcm2 между несущими равна 0,88372094.
Если разности фаз Δψc1 и Δψc2 измеряют в диапазоне погрешности ±
1%, то
Δψсм1 = 0,54 рад,
Δψсм2 = 2,748 рад.
Результаты вычисления разностей фаз Δψc1 и Δ
ψc2 таковы:


Эти разности фаз подставляют в выражение для измерения скорости течения, вычисляя следующее значение скорости течения:
Исходная скорость Vcosα течения была равна 20 м/с, но фактически измеренная скорость течения стала равной 19,95 м/с. Таким образом, погрешность измерения составила примерно -0,15%. То есть, разности фаз были измерены два раза в диапазоне 1%. Все же, в результате этого погрешность измерения скорости течения была снижена на 0,15%.
Именно по причине снижения этой погрешности значительно уменьшаются погрешности измерения разностей фаз δψc1 и Δψc2.
Разность фаз Δψсм1 измеряли с погрешностью δc (=1%). Все же, погрешность Δψc1 измерения уменьшилась в m1/β(=7210,1702≈423) раз (см. выражение 17). В вышеуказанном примере предполагается, что разности фаз Δψмм1 и Δψмм2 измеряют с погрешностью 1%, но на самом деле разность фаз обычно измеряют с погрешностью 0,5%.
Как описано выше, согласно изобретению, скорость течения газа, когда скорость течения большая, а скорость звука маленькая, можно точно измерить на основании способа, предусматривающего определение разности фаз, безотносительно изменения скорости звука в трубе большого внутреннего диаметра.
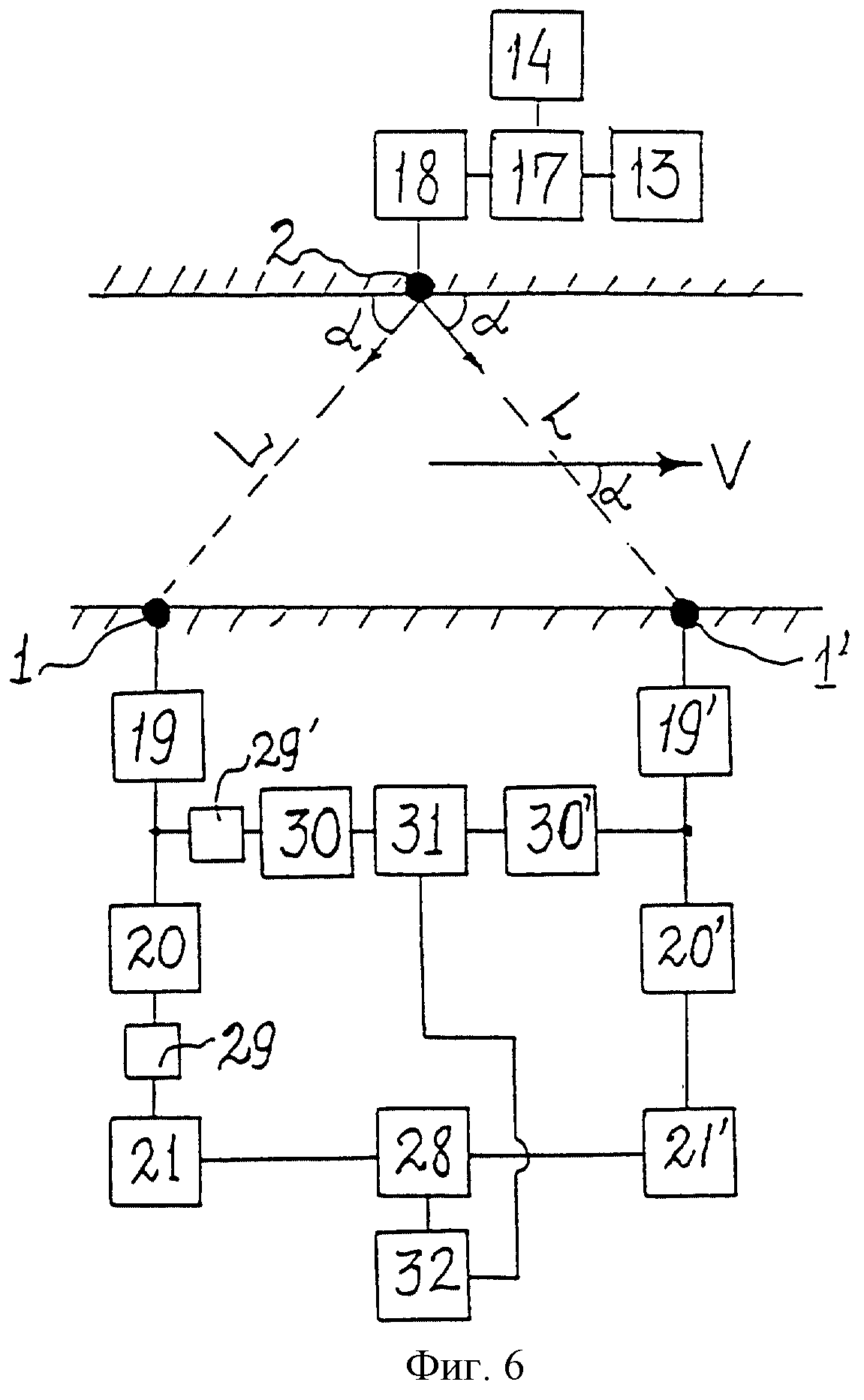
На фиг. 5, в качестве одного конкретного варианта осуществления изобретения, изображена условная блок-схема, иллюстрирующая конфигурацию системы для осуществления способа измерения скорости течения, основанного на способе, предусматривающем определение разности фаз.
Ультразвуковые
преобразователи 1 и 1' являются каждый ультразвуковым принимающим преобразователем для приема ультразвуковой волны, а ультразвуковой преобразователь 2 является
ультразвуковым
распространяющим
преобразователем для распространения ультразвуковых волн с расширенным углом направленности. Генератор 13 несущей и генератор 14 модулирующей волны генерируют частоту fc
ультразвуковой
несущей и частоту fм амплитудной модуляции, соответственно. Амплитудный модулятор 17 осуществляет амплитудную модуляцию частоты fc ультразвуковой несущей.
Выходной усилитель 18
возбуждает ультразвуковой преобразователь 2. Принимающие усилители 19 и 19' усиливают сигналы из ультразвуковых преобразователей 1, 1', соответственно. Демодуляторы 20, 20'
демодулируют
амплитудно-модулированный сигнал для детектирования частоты fм модуляции. Узкополосные усилители 21, 21' усиливают сигналы, выдаваемые из демодуляторов 20,20'. Дискриминаторы
28, 28'
разности фаз детектируют разности фаз Δψмм1 и Δψмм2 между волнами fм амплитудной модуляции. Дискриминаторы 31 разности фаз
детектируют
разности фаз Δψсм1 и Δψсм2 между несущими fc. Усилители-ограничители 30, 30' усиливают и ограничивают
амплитудно-модулированные сигналы до
предварительно определенного уровня. Фазовращатели 29, 29' необходимы при обеспечении принудительного регулирования выходного сигнала дискриминаторов 28, 28'
разности фаз до нуля, если скорость
течения V равна нулю. Арифметико-логический блок 32 вычисляет разности фаз Δψc1 и Δψc2 между несущими fc, а потом - скорость течения, в
соответствии с изобретением.
Ультразвуковая система для измерения скорости течения работает следующим образом.
Амплитудный модулятор 17 осуществляет амплитудную модуляцию частоты fc несущей, генерируемой генератором 13 несущей, в частоту fм модуляции, генерируемую генератором 14 модуляции. Усилитель 18 усиливает амплитудно-модулированный сигнал и подает его в распространяющий ультразвуковой преобразователь 2. Если преобразователь 2 распространяет амплитудно-модулированный сигнал в направлениях, совпадающих со скоростью течения и противоположных ей, принимающий преобразователь 1 принимает сигнал, распространяемый в направлениях, совпадающих со скоростью V течения и противоположных ей, и преобразует его в электрические сигналы. Выходной сигнал из принимающего преобразователя 1 усиливается принимающим усилителем 19 для усиления полосу частот fc±fм и вводится в демодулятор 20. На выходе демодулятора 20 генерируется сигнал fм амплитудной модуляции. Этот сигнал вводится через фазовращатель 29 в узкополосный усилитель 21. Узкополосный усилитель 21 снова фильтрует амплитудно-модулированный сигнал и подает его на дискриминатор 28 разности фаз меньшей частоты fм. Дискриминатор 28 детектирует сигнал, соответствующий разности фаз Δψмм2, которая меньше, чем π, и вводит свой выходной сигнал в арифметико-логический блок 32, который вычисляет разность фаз и скорость течения.
Ультразвуковая волна, распространяемая в направлении скорости течения, принимается принимающим преобразователем 1', и разность фаз Δψмм1 детектируется посредством принимающего усилителя 19', демодулятора 20', узкополосного усилителя 21', дискриминатора 28', как упоминалось выше. В то же время, выходной сигнал из принимающего усилителя 19' усиливается до насыщенного состояния усилителем-ограничителем 30' и вводится в дискриминатор 31'. Дискриминатор 31' генерирует сигналы, соответствующие разностям фаз Δψсм1 и Δψсм2, и вводит их в арифметико-логический блок 32.
Предполагается, что в арифметико-логический блок 32 заранее принудительно введены целые числа n, fм, fc, L, а также сова, и этот блок получает m1 и m2 в соответствии с выражением (13), вычисляет разности фаз Δψс1 и Δψc2 несущих в соответствии с выражением (15) и вычисляет скорость течения V в соответствии с выражением (16). Полученную таким образом скорость течения можно использовать при вычислении расхода в случае адаптации к расходомеру.
Существует случай измерения скорости звука С другим способом. Например, если расходомер для измерения объемного расхода установлен для измерения массового
расхода газа,
давление и температуру газа измеряют отдельно. В этом случае можно вычислить скорость звука, используя результаты измерения давления и температуры газа. Если каким-то образом измеряют
расход жидкости,
существует случай, когда скорость звука С в жидкости может быть известна заранее и не изменяется. В этом случае осуществляют прием ультразвуковых волн, распространяемых в
направлениях, совпадающих со
скоростью течения и противоположных ей, и измеряют разность фаз Δϕc между принимаемыми сигналами, так что скорость течения V можно измерять на
основании выражения (5). На этот
раз, если Δϕc>>π, разность фаз Δϕc измеряют следующим образом: чтобы осуществить амплитудную
модуляцию ультразвуковой несущей
fc в частоту fм модуляции, выбирают частоту fм модуляции следующим образом:
fм≤C2min/(4LVmax
cosα), (18)
где Cmin - наименьшая ожидаемая скорость звука в текучей среде.
Разность фаз Δϕм между принимаемыми сигналами выбранных таким образом амплитудно-модулированных частот не превышает π при максимальном измеряемом значении скорости течения. Принимаемый амплитудно-модулированный сигнал демодулируют, так что сначала измеряют разность фаз Δϕм между модулированными частотами, а потом получают m с помощью следующего выражения (19).
Δϕм•(fc/πfм) = m+a = Δϕc/π, (19)
где а<1,0.
aπ в выражении (19) - это часть, которую можно измерить в разности фаз между несущими. В то же время, измерение разности фаз aπ между сигналами несущей и вычисление Δϕc осуществляют с помощью следующего выражения.
Δϕc = mπ+aπ. (20)
Затем
Δϕc подставляют в выражение (5) для вычисления
скорости течения V. Здесь измеряемая
разность фаз представляет собой аπ. Когда абсолютная погрешность Δaπ при измерении aπ равна δaπ•
aπ (δaπ
- относительная погрешность), погрешность измерения Δϕc имеет следующий вид:
δΔϕc = (δaπ•aπ
)/[(m+a)π] = δaπ•/(m+a).
Следовательно, δΔϕc<<δaπ и точность вычисления скорости
течения повышается. Другой вариант системы для осуществления способа измерения скорости течения аналогичным методом изображен в виде условной блок-схемы на
фиг.6.
Обращаясь к фиг.6, отмечаем, что здесь указаны такие же позиции, что и для идентичных частей на фиг. 5. Только предполагается, что в арифметико-логические блоки для вычисления скорости заранее принудительно введены целые числа fм, fc, L, а также cosα, и эти блоки вычисляют скорость течения на основании выражений (18), (19) и (5).
Следовательно, изобретение обеспечивает амплитудную модуляцию ультразвуковой волны и измерение скорости течения с большей достоверностью на основании ультразвукового способа, предусматривающего определение разности времен в большой реке, русле большой промывной галереи, трубе большого внутреннего диаметра. Кроме того, изобретение обеспечивает способ "измерения" скорости течения на основании разности фаз, независимый от скорости звука, с использованием обычного дискриминатора разности фаз, имеющего диапазон π измерения разности фаз, даже в случае, если разность фаз превышает π радиан.
Реферат
Изобретение предназначено для измерения скорости течения в реке, открытом русле промывной галереи и трубе большого внутреннего диаметра. Осуществляют амплитудную модуляцию незатухающей гармонической ультразвуковой синусоидальной волны fс сигналом с частотой fм, осуществляют распространение/прием амплитудно-модулированного сигнала и используют волну амплитудной модуляции при измерении времени распространения ультразвука. Способ по второму варианту предусматривает определение разности фаз. При этом осуществляют амплитудную модуляцию ультразвуковой волны предварительно определенным сигналом с частотой fм. Если разность фаз между ультразвуковыми волнами, распространяемыми в направлениях, совпадающих со скоростью течения или противоположных ей, превышает π радиан, осуществляют передачу/прием амплитудно-модулированного сигнала, измеряют разность фаз между амплитудно-модулированными сигналами, а затем измеряют разность фаз между ультразвуковыми волнами. Обеспечивается измерение скорости с большей достоверностью повышения точности измерения и расширение области использования. 3 с. и 1 з.п. ф-лы, 6 ил.

Формула
V= (L/cosα )[(1/t1)-(1/t2 )] ,
при этом частоту fм сигнала амплитудной модуляции выбирают из следующего выражения:
fр<<10[(Сmax+Vmaxcosα)/L] ≤fм≤0,05fс,
где fр - максимальная частота пульсации затухания в момент распространения ультразвуковой волны в текучей среде;
Сmax - максимальная скорость звука в текучей среде;
L - интервал распространения ультразвука;
Vmax - максимальная ожидаемая скорость течения на интервале L;
α - угол между направлением распространения ультразвуковой волны и направлением скорости течения.
Δ ΨC1/π = ΔΨM1(fc/πfм) = m1+β,(β<1,0),
ΔΨC2/π = ΔΨM2(fc/πfм) = m2+γ,(γ<1,0),
запоминают m1 и m2 в запоминающем устройстве, вычисляют
ΔΨC1 = m1π+βπ,
ΔΨC2 = m2π +γπ,
а затем вычисляют скорость течения V по следующему выражению:
V = [πfcL/cosα][1/ΔΨC1)-(1/ΔΨC2)],
при этом частоту fм амплитудной модуляции выбирают в соответствии с выражением
fм= [(n+а)/2L] (Сmin-Vmax),
где n= [а(Сmin-Vmax)-b(Сmax+Vmax)] /(Сmax-Сmin+2Vmax),
запоминают n в запоминающем устройстве, измеряют разности фаз аπ и bπ, которые могут измерять фазовые дискриминаторы и вычисляют
ΔΨM1 = nπ+aπ,
ΔΨM2 = nπ +bπ,
при этом а<1,0 - коэффициент для выбора максимального диапазона измерения (аπ)max одного из фазовых дискриминаторов, и b<1,0 - коэффициент для выбора максимального диапазона измерения (bπ)max другого фазового дискриминатора, Сmax и Сmin - максимальная и минимальная ожидаемые скорости звука в текучей среде, Vmax - максимальная ожидаемая скорость течения.
V = (ΔϕcC2)/(4πfLcosα),
где С - скорость звука;
f - частота ультразвуковой волны;
L - расстояние, на которое распространяется ультразвуковая волна;
α - угол между направлением распространения ультразвуковой волны и направлением скорости течения,
отличающийся тем, что осуществляют амплитудную модуляцию, по меньшей мере, одной ультразвуковой волны несущей частоты fс сигналом с частотой fм амплитудной модуляции, осуществляют распространение амплитудно-модулированных сигналов в противоположных направлениях, под углом α к направлению потока, осуществляют демодуляцию принимаемых сигналов, измеряют разность фаз Δ ϕм<π между демодулированными сигналами, измеряют разность фаз аπ между принимаемыми ультразвуковыми сигналами несущей частоты fс с помощью фазового дискриминатора, определяют кратное m числа а из выражения
Δϕм•(fc/πfм) = m+a = Δϕc/π(a<1,0),
и вычисляют Δϕc = mπ+aπ, а затем вычисляют скорость течения V по разности фаз Δ ϕc, при этом частоту fм амплитудной модуляции выбирают из выражения
fм≤C/(4LVmaxcosα),
где Сmin - наименьшая ожидаемая скорость звука в текучей среде;
Vmax - максимальная ожидаемая скорость течения на интервале L.
Комментарии