Измерительный модуль скорости потока и способ егоизмерения - RU2321880C2
Код документа: RU2321880C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к приспособлениям для устройств с клапанами управления и более конкретно - к измерительному модулю потока и способу измерения скорости потока текучей среды через канал, которая регулируется управляющей клапанной сборкой.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В производстве с управляемыми процессами, такими, например, как химические процессы, процессы, используемые на нефтеперерабатывающих заводах, при производстве пищи и напитков, управляющие клапанные сборки используются для управления характеристиками потока текучих сред, таких, например, как газ, пар, вода, химические соединения. Системы управления процессом обычно контролируют параметры управления процессом и координируют работу устройств, управляющих процессом, таких как управляющие клапанные сборки, для обеспечения эффективной работы систем управления процессом. Часто требуется контролировать скорость потока текучих сред через трубопроводы, которая регулируется управляющей клапанной сборкой. Кроме того, изменения условий работы или операций в ходе процесса могут требовать контроля скоростей потока текучих сред в тех трубопроводах, где раньше контроль не требовался.
Типичная управляющая клапанная сборка (узел) обычно включает устройство с клапаном, исполнительный механизм и позиционер, такой, например, как интеллектуальный позиционер, пневматический позиционер или аналогичный электронный позиционер. Устройство с клапаном обычно имеет входное отверстие и выходное отверстие, между которыми проходит канал. В канале обычно располагается дроссельный элемент для управления скоростью потока текучей среды. Шток клапана или вал гнездообразующих клапанов обычно соединяет дроссельный элемент с исполнительным механизмом. Исполнительный механизм обычно перемещает дроссельный элемент по направлению внутрь канала и наружу, тем самым регулируя скорость потока текучей среды, протекающей через канал. В тех случаях, когда используется интеллектуальный позиционер, позиционер обычно принимает точку установки системы управления процессом как начальную и соответственно управляет действием исполнительного механизма для регулировки положения дроссельного элемента внутри канала. Интеллектуальные позиционеры часто включают линию обратной связи, подсоединенную к штоку клапана или валу гнездообразующих клапанов для генерации сигнала обратной связи по положению с целью указания положения дроссельного элемента внутри канала. Сигнал обратной связи по положению обычно направляется назад к системе управления процессом через интеллектуальный позиционер.
Является доступным ряд различных устройств для измерения потока предшествующего уровня техники, которые измеряют скорость потока текучей среды через трубопровод при регулировке с помощью управляющей клапанной сборки. Примеры таких устройств для измерения потока предшествующего уровня техники включают вихревые измерители, измерители магнитного потока, измерители кориолисовой силы, измерители перепадов давления и измерительные диафрагмы. Однако часто требуется, чтобы операции управления процессом завершались в ходе установки таких устройств для измерения потока предшествующего уровня техники в операционные системы управления процессом. Несовершенные системы управления процессом часто приводят к денежным потерям, связанным с уменьшенным выходом продукта. Кроме того, процедуры, связанные с установкой таких измерителей потока предшествующего уровня техники, являются очень сложными, требующими временных затрат и дорогостоящими, так как обычно они требуют разрезания трубопроводов и установки приваренных фланцев для соединения с измерителями потока внутри трубопроводов.
Другое устройство для измерения потока предшествующего уровня техники обычно состоит из интеллектуального позиционера, обладающего способностью измерять поток. Обычно такой интеллектуальный позиционер предшествующего уровня техники включает базу данных, или таблицу, или уравнение, которое устанавливает соотношение между положением дроссельного элемента и размерным коэффициентом клапана, связанным с устройством с клапаном, которое используется. Интеллектуальный позиционер предшествующего уровня техники использует сигнал обратной связи по положению, представляющий положение дроссельного элемента, для определения связанных с ним размерных коэффициентов клапана. Скорость потока получается на основе определяемых размерных коэффициентов клапана, давления перед дроссельным элементом и за дроссельным элементом и других характеристик текучей среды. Однако установка интеллектуального позиционера, обладающего способностью измерять поток, в существующей системе управления процессом может быть относительно дорогостоящей процедурой, требующей временных затрат. Такой процесс установки обычно должен требовать завершения операций управления процессом, что часто приводит к потерям дорогостоящего производительного времени. Также вероятно, что стоимость интеллектуального позиционера, обладающего способностью измерения потока, была бы высокой, если не более высокой, чем стоимость действующего позиционера. Кроме того, существующий позиционер или вся управляющая клапанная сборка часто удаляется с нарушением целостности, до установки интеллектуального позиционера предшествующего уровня техники, имеющего способность измерять поток, что приводит к ущербу для функционального устройства управления процессом.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание устройства для измерения скорости потока с эффективной стоимостью, которое может быть относительно легко установлено в существующую систему управления процессом для совместной работы с существующими устройствами для управления процессом, при минимизации или исключении разрушений при выполнении операций управления процессом в ходе процесса установки и минимизации нежелательного удаления функциональных устройств управления процессом.
Поставленная задача в соответствии с аспектом настоящего изобретения решена путем использования измерительного модуля потока, который подбирается таким образом, чтобы он работал совместно с управляющей клапанной сборкой для измерения скорости потока текучей среды через канал, которая регулируется управляющей клапанной сборкой. Управляющая клапанная сборка обычно содержит дроссельный элемент, перемещаемый внутри канала, и интеллектуальный позиционер, приспособленный для определения приблизительного положения дроссельного элемента внутри канала и генерации ответного характерного сигнала обратной связи по положению. Измерительный модуль потока включает первый порт связи, приспособленный для приема сигнала давления выше по течению, представляющего собой определяемое давление перед дроссельным элементом, второй порт связи, приспособленный для приема сигнала давления ниже по течению, представляющего собой определяемое давление за дроссельным элементом, и третий порт связи, приспособленный для приема сигнала обратной связи по положению, представляющего приблизительное положение дроссельного элемента внутри канала. Управляющее устройство коммуникативно подсоединяется к первому, второму и третьему портам связи и приспосабливается для работы в соответствии с компьютерной программой, реализованной в компьютерной считываемой среде. Компьютерная программа включает первую подпрограмму, которая предписывает управляющему устройству определять размерный коэффициент клапана на основе принятого сигнала обратной связи по положению, и вторую подпрограмму, которая предписывает управляющему устройству выдавать сигнал скорости потока, представляющий собой скорость потока текучей среды, протекающей через канал, на основе определяемого размерного коэффициента клапана, принятого сигнала давления выше по течению и принятого сигнала давления ниже по течению.
В соответствии с еще одним аспектом изобретения предложен способ измерения скорости потока текучей среды через канал, которая регулируется управляющей клапанной сборкой. Управляющая клапанная сборка в основном включает устройство с клапаном, содержащее дроссельный элемент, передвигаемый внутри канала, и интеллектуальный позиционер, приспособленный для того, чтобы воспринимать приблизительное положение дроссельного элемента внутри канала и в ответ генерировать соответствующий сигнал обратной связи по положению. Способ включает стадии создания измерительного модуля потока, включающего управляющее устройство, коммуникативно соединенное с памятью и первым, вторым и третьим портами связи. Измерительный модуль потока коммуникативно подсоединяется к интеллектуальному позиционеру через первый порт связи и принимает сигнал обратной связи по положению, представляющий собой приблизительное положение дроссельного элемента внутри канала, через первый порт связи. Измерительный модуль потока принимает сигнал давления выше по течению, представляющий собой определяемое давление перед дроссельным элементом, через второй порт связи и сигнал давления ниже по течению, представляющий собой определяемое давление после дроссельного элемента, через третий порт связи. Размерный коэффициент клапана определяется на основе приблизительного положения дроссельного элемента, как отмечается с помощью принимаемого сигнала обратной связи по положению. Скорость потока текучей среды, протекающей через канал, определяется на основе определяемого давления перед дроссельным элементом, определяемого давления после дроссельного элемента и определяемого размерного коэффициента клапана.
В соответствии с еще одним аспектом настоящего изобретения предложен способ измерения скорости потока текучей среды, протекающей через канал внутри управляющей клапанной сборки. Способ включает стадии создания управляющей клапанной сборки, содержащей дроссельный элемент, передвигаемый внутри канала, и интеллектуальный позиционер, приспособленный для того, чтобы воспринимать положение дроссельного элемента внутри канала, и создания измерительного модуля потока. Измерительный модуль потока коммуникативно подсоединяется к интеллектуальному позиционеру без нарушения потока текучей среды через канал. Сигнал скорости потока, представляющий собой скорость потока текучей среды, протекающей через канал, генерируется на основе определяемых давлений перед дроссельным элементом и после дроссельного элемента и на основе воспринимаемого положения дроссельного элемента внутри канала для текучей среды.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылкой на сопровождающие чертежи, на которых:
фиг.1 изображает собой схему приведенного в качестве примера устройства внутри части системы управления процессом, которое может быть адаптировано согласно изобретению;
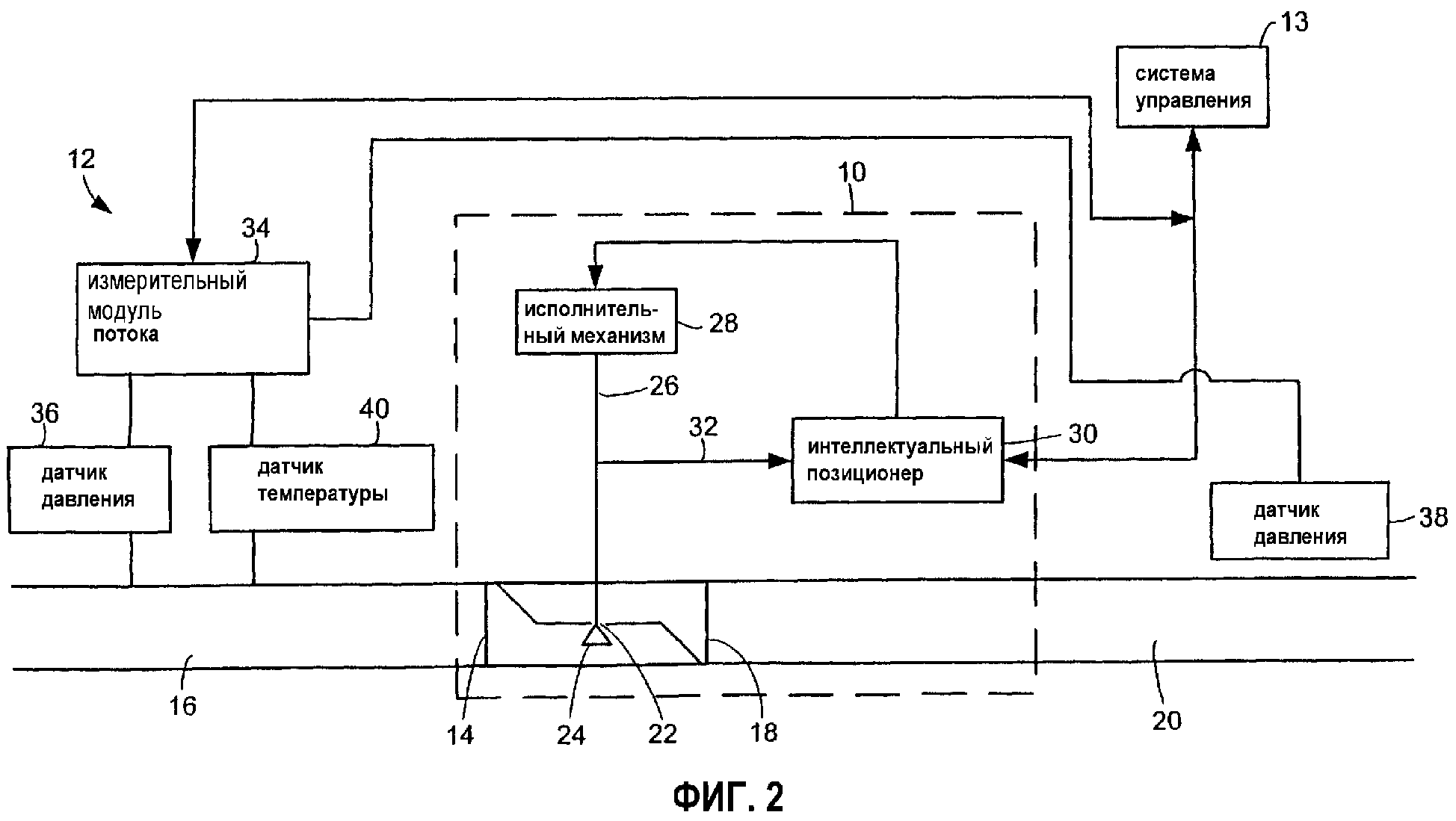
фиг.2 - схему измерительного модуля потока, действующего в сочетании с управляющей клапанной сборкой внутри части системы управления процессом, согласно изобретению;
фиг.3 - схему, показывающую измерительный модуль потока согласно изобретению;
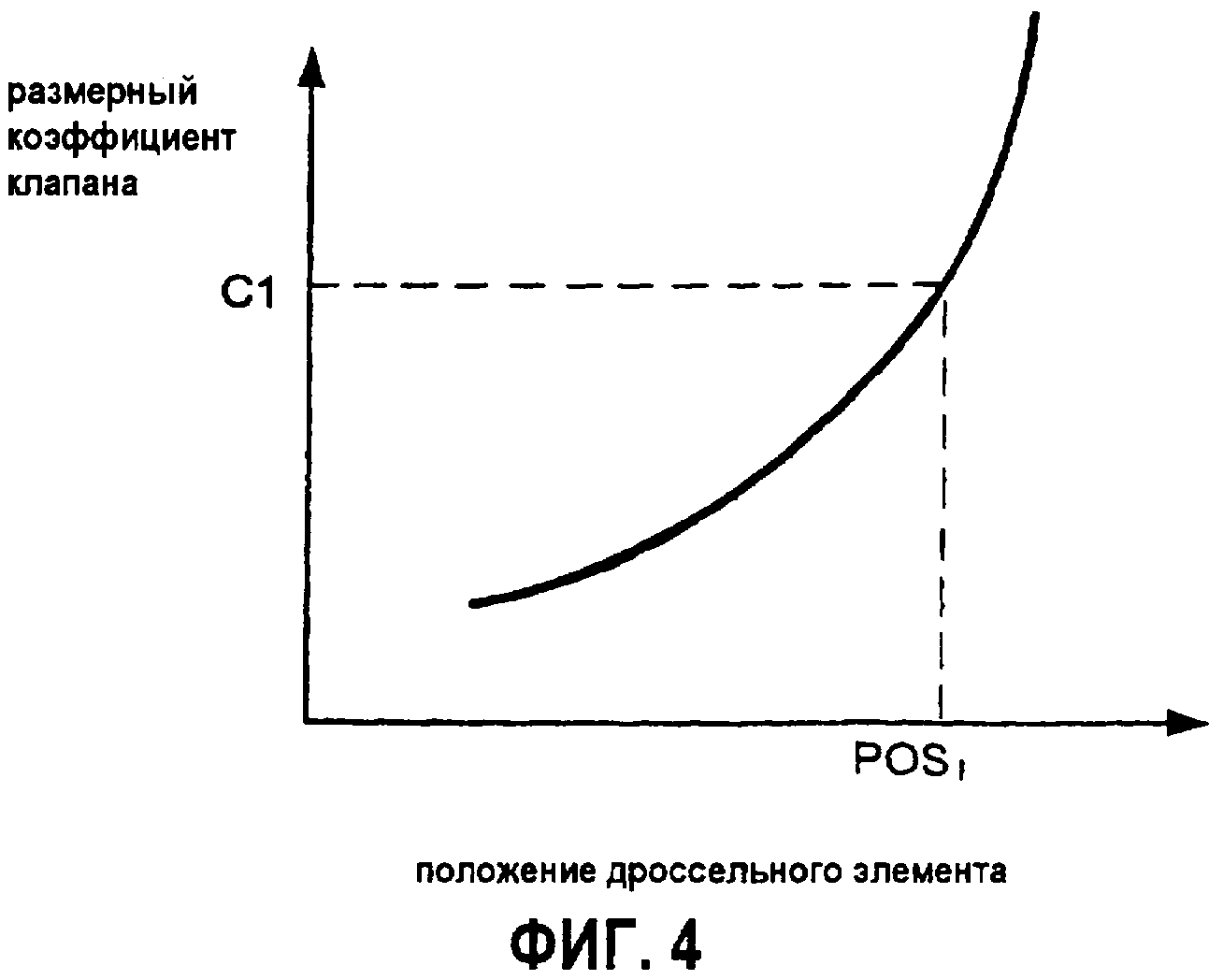
фиг.4 - график, иллюстрирующий пример соотношения между различными положениями дроссельного элемента и размерными коэффициентами клапана для конкретной управляющей клапанной сборки, согласно изобретению;
фиг.5 - блок-схему, иллюстрирующую способ измерения скорости потока текучей среды, протекающей через канал, согласно изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
На фиг.1 показан пример управляющей клапанной сборки 10 внутри части системы 12 управления процессом, которая может быть адаптирована для работы в соответствии с вариантом реализации настоящего изобретения. Управляющая клапанная сборка 10 в основном управляет потоком текучей среды, такой, например, как жидкость или газ, через трубопровод, в соответствии с командами, принимаемыми от системы управления 13.
Управляющая клапанная сборка 10 содержит устройство с клапаном и входным отверстием 14 для подсоединения к трубопроводу 16 выше по течению и выходным отверстием 18 для подсоединения к трубопроводу 20 ниже по течению, и с каналом, расположенным между входным отверстием 14 и выходным отверстием 18. Канал 22 образует соединение для текучей среды между входным отверстием 14 и выходным отверстием 18. Дроссельный элемент 24, такой, например, как тарельчатый клапан или конический вентиль, обычно прикрепляется к нижней части штока клапана или вала гнездообразующих клапанов 26 и часто располагается ниже канала 22. Дроссельный элемент 24 обычно изготавливается такого размера, чтобы полностью перекрывать канал 22, так, что если дроссельный элемент 24 перемещается по направлению вверх из его самого нижнего положения, поток текучей среды через канал постепенно уменьшается и в итоге исчезает, когда дроссельный элемент 24 оказывается близко к каналу 22. С другой стороны, поскольку дроссельный элемент 24 постепенно смещается вниз из самого верхнего положения, незаблокированная или открытая область канала 22 постепенно увеличивается, тем самым увеличивая поток текучей среды через канал. Как результат, открытая область канала 22 напрямую соотносится с положением дроссельного элемента 24 внутри канала, которое, в свою очередь, соотносится со скоростью потока текучей среды, протекающей через трубопровод. Исполнительный механизм 28 действующим образом подсоединяется к другому концу штока клапана или вала гнездообразующих клапанов 26 и обычно обеспечивает силу, необходимую для смещения дроссельного элемента 24 вверх или вниз. Надо отметить что, хотя была описана конкретная конфигурация устройства с клапаном и с конкретным дроссельным элементом, также в рамках объема изобретения может рассматриваться использование альтернативных конфигураций клапанов управления и альтернативных типов дроссельных элементов.
Управляющая клапанная сборка 10 также включает интеллектуальный позиционер 30, который коммуникативно подсоединяется как к системе управления 13, так и к исполнительному механизму 28. Система управления 13 обычно контролирует операции процесса и выдает заданные координаты положения по отношению к управляющей клапанной сборке 10 для надлежащего расположения дроссельного элемента 24 при попытке обеспечить правильное осуществление операций процесса. Сигнал с координатами положения обычно принимается и обрабатывается интеллектуальным позиционером 30. В ответ на сигнал с координатами положения интеллектуальный позиционер 30 передает сигналы определенного размещения исполнительному механизму 28, который работает с целью достижения соответствующего положения дроссельного элемента 24. Линия обратной связи 32 обычно соединяет шток клапана или вал гнездоообразующих клапанов 26 с интеллектуальным позиционером 30 так, что интеллектуальный позиционер 30 может отслеживать реальное расположение дроссельного элемента 24 внутри канала. На основе определяемого положения дроссельного элемента 24 интеллектуальный позиционер 30 в ответ генерирует сигнал обратной связи по положению. Сигнал обратной связи по положению может быть отправлен к системе управления 13 по требованию.
На фиг.2 показана схема измерительного модуля 34 потока, действующего в сочетании с управляющей клапанной сборкой 10 внутри части системы управления процессом 12 в соответствии с вариантом реализации настоящего изобретения. В одном варианте реализации датчики давления 36, 38 создаются выше по течению и ниже по течению относительно входного отверстия 14 или дроссельного элемента 24. Датчик давления 36 определяет давление перед дроссельным элементом 24 и в ответ генерирует сигнал P1 давления выше по течению. Аналогично, датчик давления 38 определяет давление ниже по течению для выходного отверстия 18 или дроссельного элемента 24 и в ответ генерирует сигнал P2 давления ниже по течению. Кроме того, выше по течению создается датчик температуры 40 для входного отверстия 14 или дроссельного элемента 24 для определения температуры вытекающей текучей среды и генерирования в ответ температурного сигнала Т. Нужно отметить, что хотя измерения температуры текучей среды часто делаются выше по течению, перед дроссельным элементом 24, также могут использоваться изменения температуры жидкой среды, взятые ниже по течению, после дроссельного элемента 24.
Измерительный модуль 34 потока коммуникативно подсоединяется к датчикам давления 36, 38, датчику температуры 40, и линии данных, коммуникативно соединяющей систему управления 13 с интеллектуальным позиционером 30. Это позволяет измерительному модулю 34 потока запрашивать сигнал обратной связи по положению, представляющий определяемое положение дроссельного элемента 24 внутри канала, от интеллектуального позиционера 30 через линию связи к линии данных. В другом варианте реализации изобретения измерительный модуль 34 потока непосредственно коммуникативно соединяется с интеллектуальным позиционером 30.
Интеллектуальный позиционер 30 часто снабжается энергией от контура на той же самой линии, используемой для коммуникативного подсоединения интеллектуального позиционера 30 к системе управления 13. В тех случаях, когда измерительный модуль 34 потока непосредственно подсоединяется к линии, связывающей интеллектуальный позиционер 30 с системой управления 13, измерительный модуль 34 потока также может снабжаться энергией от контура за счет системы управления 13. Альтернативный вариант реализации измерительного модуля 34 потока может снабжаться энергией от независимого источника энергии, такого, например, как источник постоянного тока, или солнечный элемент, или блок аккумуляторов.
Кроме того, измерительный модуль 34 потока также может непосредственно коммуникативно подсоединяться к системе управления 13 таким образом, что раз измерительный модуль 34 потока определил скорость потока текучей среды, протекающей через трубопровод, скорость потока может быть связана с системой управления 13, если требуется. В альтернативном варианте реализации линии связи от измерительного модуля 34 потока, направленные к системе управления 13, могут прокладываться к системе управления 13 через интеллектуальный позиционер 30, тем самым исключая необходимость создания прямой линии связи между измерительным модулем 34 потока и системой управлений 13. Система управления 13 может направлять данные скорости потока к другим устройствам в системе управления процессом, например, таким, как насос или другое управляющее устройство. Такое устройство может использовать данные о скорости потока для настройки его собственных рабочих параметров при попытках обеспечить надлежащие операции управления процессом. В другом варианте реализации изобретения скорость потока может локально сохраняться в памяти внутри измерительного модуля 34 потока. Такие сохраненные данные скорости потока могут быть извлечены непосредственно из измерительного модуля 34 потока через устройство поиска локальных данных, такое, например, как персональное информационное устройство (PDA), небольшой портативный компьютер или другое портативное устройство поиска данных. В еще одном варианте реализации измерительный модуль 34 потока может включать дисплей, который отображает определенную скорость потока текучей среды, протекающей через трубопровод. В другом варианте реализации измерительный модуль потока может быть коммуникативно подсоединен к другому устройству, такому, например, как насос или другое управляющее устройство, внутри системы 12 управления процессом или системы с контролирующим устройством. Это дало бы возможность измерительному модулю 34 потока пересылать данные скорости потока к таким устройствам.
В еще одном варианте реализации измерительный модуль 34 потока может включать датчики давления 36, 38 и датчик температуры 40 в качестве компонент. В случае, если операционная система управления, включая устройство с клапаном, еще не сконструирована так, чтобы она контролировалась по отношению к давлениям выше по течению и ниже по течению и температуре текучей среды во время установки измерительного модуля 34 потока, датчики давления 36, 38 и датчик температуры 40 могут быть установлены без необходимости прерывать операции процесса.
На фиг.3, показана схема измерительного модуля 34 потока в соответствии с вариантом реализации настоящего изобретения. Измерительный модуль 34 потока обычно включает управляющее устройство 42, например, такое, как процессор, коммуникативно подсоединенное к памяти 44 и ко множеству портов связи 46-54. Память 44 включает ряд программных модулей, содержащих операционный программный модуль 56, модуль данных 58 для сохранения множества различных положений дроссельного элемента, множества размерных коэффициентов клапана и связей между каждым сохраненным положением дроссельного элемента и одним или более коэффициентами клапана. В другом варианте реализации программный модуль, включающий программные операции, основанные на уравнении, представляющем соотношение между различными положениями дроссельного элемента и размерными коэффициентами клапана, может использоваться для определения размерного коэффициента клапана, связанного с определяемым положением дроссельного элемента. Удельный вес текучей среды, протекающей через управляющую клапанную сборку 10, также может сохраняться в модуле данных 58. Кроме того, в тех случаях, когда температура текучей среды, протекающей через канал, является относительно постоянной, также может сохраняться значение относительно постоянной температуры, тем самым исключается необходимость наличия датчика температуры.
Порты связи 46, 48, 50, 52, 54 коммуникативно подсоединяются к датчикам давления 36, 38, датчику температуры 40, интеллектуальному позиционеру 30 и системе управления 13, соответственно. Хотя отдельные порты связи описываются как порты, связанные с конкретными устройствами, альтернативные конструкции связи, включающие разделение портов связи с помощью многочисленных устройств при осуществлении связи с измерительным модулем 34 потока, также рассматриваются как находящиеся в рамках изобретения. Кроме того, альтернативные конструкции памяти для хранения операционного программного обеспечения и различных типов данных также рассматриваются как находящиеся в рамках изобретения.
Порт 60 интерфейса коммуникативно подсоединяется к управляющему устройству 42. Порт 60 интерфейса может быть использован для осуществления загрузки программного обеспечения, связанного с размерными коэффициентами клапана, положениями дроссельного элемента, уравнениями для коэффициентов потока, данными удельного веса и/или величин относительно постоянной температуры текучей среды в модуль данных 58. В альтернативном варианте реализации изобретения загрузка программного обеспечения может осуществляться с помощью системы управления 13 через порт связи 54. В другом варианте реализации необходимые данные могут быть введены в измерительный модуль 34 потока пользователем вручную, через локальный или удаленный интерфейс пользователя. В еще одном варианте реализации различные установки размерных коэффициентов клапана или уравнений для коэффициентов потока, связанные с различными положениями дроссельного элемента для ряда различных управляющих клапанных сборок могут предварительно сохраняться в памяти 44. Затем пользователь может выбирать подходящую установку сохраненных ранее в памяти размерных коэффициентов клапана или уравнения для коэффициента потока для использования с тем видом управляющей клапанной сборки, которая применяется. Аналогично, значения удельного веса для ряда различных видов текучих сред также могут быть предварительно сохранены в памяти 44. Пользователь обеспечивается возможностью выбора вводимого вида текучей среды, протекающей через управляющую клапанную сборку, и подходящий удельный вес автоматически выбирается для использования с помощью измерительного модуля 34 потока.
Измерительный модуль 34 потока обычно принимает сигнал давления выше по течению P1, ниже по течению P2, сигнал температуры T и сигнал обратной связи по положению от интеллектуального позиционера 30 как входные и в ответ генерирует сигнал скорости потока, представляющий скорость потока текучей среды, протекающей через управляющую клапанную сборку 10 как выходной. Сигнал скорости потока обычно передается к системе управления 13. Как хорошо известно квалифицированным специалистам, размерные коэффициенты клапана обычно определяются экспериментально для каждого вида и размера клапана управления. Отношение положения дроссельного элемента внутри канала к размерному коэффициенту клапана в общем может быть представлено кривой. Пример такой кривой показан на фиг.4. Например, когда дроссельный элемент находится в положении POS1, связанный с ним размерный коэффициент клапана равен C1. Измерительный модуль 34 потока сохраняет размерные коэффициенты клапана, связанные с множеством различных положений дроссельного элемента для вида и размера конкретного клапана управления, используемого в памяти 44. Такие данные могут храниться в форме таблицы. В зависимости от требований конкретного применения, количество связей между положениями дроссельного элемента и размерными коэффициентами клапана, сохраняемое или вводимое в измерительный модуль 34 потока, может изменяться. Удельный вес текучей среды, протекающей через управляющую клапанную сборку 10, и температура текучей среды в случаях, когда температура текучей среды является относительно постоянной, также могут вводиться и сохраняться в памяти 44. В альтернативном варианте реализации может быть получено уравнение, представляющее соотношение между положениями дроссельного элемента и размерными коэффициентами клапана. Модуль программного обеспечения может быть запрограммирован для осуществления операций, связанных с таким полученным уравнением. Другими словами, модуль программного обеспечения должен принимать положение дроссельного элемента как входное и определять связанный с ним размерный коэффициент клапана, используя полученное уравнение.
Как упоминалось ранее, сигнал обратной связи по положению представляет собой определяемое положение дроссельного элемента внутри канала. Измерительный модуль 34 потока по существу использует принимаемые данные о положении дроссельного элемента для определения связанных с ним размерных коэффициентов клапана. В случаях, когда текучей средой, протекающей через управляющую клапанную сборку 10, является жидкость, обычно определяется размерный коэффициент клапана для жидкости Cν, связанный с определяемым положением дроссельного элемента.
Когда текучей средой, протекающей через управляющую клапанную сборку 10 является газ, часто требуется два вида размерных коэффициентов клапана для определения скорости потока газа через канал, размерный коэффициент клапана для газа Cg и восстановительный коэффициент C1 для клапана. В случаях, когда восстановительный коэффициент C1для клапана, связанный с устройством с клапаном, является относительно постоянным на протяжении широкого диапазона положений дроссельного элемента, величина C1относительно постоянного восстановительного коэффициента для клапана обычно сохраняется в памяти, и измерительный модуль 34 потока определяет размерный коэффициент клапана для газа Cg, связанный с определяемым положением дроссельного элемента.
В случаях, когда восстановительный коэффициент C1для клапана изменяется при изменении положения дроссельного элемента, величины восстановительных коэффициентов C1для клапана, связанные с различными положениями дроссельного элемента, могут сохраняться в памяти. В другом варианте реализации модуль программного обеспечения, запрограммированный для осуществления операций, связанных с уравнением, представляющим соотношение различных положений дроссельного элемента и восстановительных коэффициентов C1для клапана,может использоваться для получения восстановительного коэффициента C1 для клапана, связанного с определяемым положением дроссельного элемента. В любом случае, при приеме определенного положения дроссельного элемента, измерительный модуль 34 потока определяет связанный размерный коэффициент Cg клапана для газа и связанный с ним восстановительный коэффициент C1 для клапана.
Нужно отметить, что для конкретной текучей среды восстановительный коэффициент C1 для клапана обычно определяется при делении размерного коэффициента Cg клапана для газа на размерный коэффициент клапана Cν для жидкости. Следовательно, в альтернативном варианте реализации как размерные коэффициенты Cν клапана для жидкости, так и размерные коэффициенты Cgклапана для газа могут быть введены для газа, протекающего через определенную управляющую клапанную сборку 10. Измерительный модуль 34 потока может определять восстановительный коэффициент C1 для клапана для конкретного положения дроссельного элемента путем деления связанного с ним размерного коэффициента Cg клапана для газа на связанный с ним размерный коэффициент Cν клапана для жидкости. В другом варианте реализации модуль программного обеспечения может быть запрограммирован в соответствии с уравнениями, представляющими соотношение между положением дроссельного элемента и размерным коэффициентом Cνклапана для жидкости и между положением дроссельного элемента и размерным коэффициентом Cg клапана для газа. Измерительный модуль потока затем мог использовать модуль программного обеспечения для определения размерного коэффициента Cν для жидкости и размерного коэффициента Cg для газа, связанных с определяемым положением дроссельного элемента.
На фиг.5 представлен способ измерения скорости потока текучей среды через трубопровод, которая регулируется с помощью управляющей клапанной сборки 10, использующей измерительный модуль 34 потока. Измерительный модуль 34 потока выбирается на стадии 62 и коммуникативно подсоединяется к интеллектуальному позиционеру 30 через порт связи 52 на стадии 64. Линия связи между интеллектуальным позиционером 30 и измерительным модулем 34 потока может быть установлена в ходе обычных операций процесса. Кроме того, связи между измерительным модулем 34 потока и системой управления 13 могут осуществляться через интеллектуальный позиционер 30. В альтернативном варианте реализации прямая линия связи создается между измерительным модулем 34 потока и системой управления 13.
Множество положений дроссельного элемента вводится и сохраняется в памяти 44 измерительного модуля 34 потока на стадии 66. Количество положений дроссельного элемента, вводимых для сохранения, зависит от требуемого уровня точности измерения потока и может изменяться от применения к применению. На стадии 68 множество размерных коэффициентов клапана вводится и сохраняется в памяти 44 таким образом, что каждое положение дроссельного элемента связано, по крайней мере, с одним размерным коэффициентом клапана. Например, в случаях, когда измеряемой текучей средой является жидкость, размерный коэффициент клапана для жидкости вводится для каждого положения дроссельного элемента. В случае, когда измеряемой текучей средой является газ, и восстановительный коэффициент С1 для клапана является относительно постоянным, вводятся величина относительно постоянного восстановительного коэффициента C1 для клапана и величины размерных коэффициентов Cgклапана для газа, связанных с каждым положением дроссельного элемента. В случаях, когда восстановительный коэффициент C1 для клапана изменяется при изменении положения дроссельного элемента, величина восстановительного коэффициента C1 для клапана и величина размерного коэффициента Cg для газа вводится для каждого положения дроссельного элемента. В еще одном варианте реализации изобретения вводятся величины размерных коэффициентов клапана Cg для газа и размерных коэффициентов Cν клапана для жидкости, связанные с положениями дроссельного элемента для конкретного типа устройства с клапаном, и величина восстановительного коэффициента C1 для клапана, связанная с определенным положением дроссельного элемента, рассчитывается.
В одном варианте реализации размерные коэффициенты клапана, связанные с каждым положением дроссельного элемента, вводятся в память 44 измерительного модуля потока через загрузку программного обеспечения. Загрузка программного обеспечения может осуществляться через порт интерфейса 60 или с помощью системы управления 13 через порт связи 54. Положения дроссельного элемента также могут вводиться в память 44 измерительного модуля потока путем загрузки программного обеспечения. В другом варианте реализации положения дроссельного элемента и связанные с ними размерные коэффициенты клапана могут вводиться индивидуально пользователем через локальный или удаленный интерфейс, коммуникативно подсоединенный к измерительному модулю 34 потока через порт интерфейса 60.
В еще одном варианте реализации различные установки размерных коэффициентов клапана, связанные со множеством положений дроссельного элемента, могут предварительно сохраняться внутри измерительного модуля 34 потока для различных видов и размеров управляющих клапанных сборок. В этом варианте реализации пользователь обеспечивается возможностью выбора введения вида и размера требуемой управляющей клапанной сборки, и измерительный модуль 34 потока автоматически выбирает правильную установку размерных коэффициентов клапана.
В альтернативном варианте реализации изобретения могут быть получены уравнения, представляющие соотношения между (i) различными положениями дроссельного элемента и размерными коэффициентами клапана для жидкости Cν, (ii) различными положениями дроссельного элемента и размерными коэффициентами Cg клапана для газа, и/или (iii) различными положениями дроссельного элемента и восстановительными коэффициентами C1 для конкретного вида устройства с клапаном. В зависимости от характеристик текучей среды и характеристик потока конкретного применения измерения потока требуемые уравнения программируются в программных модулях в измерительном модуле 34 потока. Таким образом, измерительный модуль 34 потока обеспечивается способностью определять требуемые размерные коэффициенты клапана на основе определяемых положений дроссельного элемента.
Удельный вес текучей среды, которая измеряется, также вводится в измерительный модуль 34 потока на стадии 70. В альтернативном варианте реализации значения удельного веса некоторого количества различных текучих сред могут быть предварительно сохранены в измерительном модуле 34 потока таким образом, что пользователь просто должен выбрать подходящую текучую среду, а измерительный модуль 34 потока автоматически выбирает подходящий удельный вес.
Измерительный модуль 34 потока запрашивает и принимает сигнал обратной связи по положению, отображающий приблизительное положение дроссельного элемента 24 внутри канала, от интеллектуального позиционера 30, через порт связи 52 на стадии 72. На стадии 74 сигнал давления выше по течению P1, отображающий определяемое давление перед дроссельным элементом 24, принимается измерительным модулем 34 потока через порт связи 46. На стадии 76 сигнал давления ниже по течению P2, отображающий определяемое давление после дроссельного элемента 24, принимается через порт связи 48. Сигнал температуры T, отображающий температуру текучей среды, протекающей через управляющую клапанную сборку 10, принимается с помощью измерительного модуля 34 потока через порт связи 50, на стадии 78. В случаях, когда температура текучей среды, протекающей через канал, является по существу постоянной, значение по существу постоянной температуры текучей среды может сохраняться в памяти и извлекаться по мере необходимости для конкретных применений при измерении потока.
На стадии 80, на основе данных о положении дроссельного элемента, принимаемых с помощью сигнала обратной связи по положению, управляющее устройство 42 определяет подходящие размерные коэффициенты клапана. Например, когда измеряемой текучей средой является жидкость, извлекается размерный коэффициент клапана для жидкости Cν, связанный с положением дроссельного элемента. В случаях, когда измеряемым текучим веществом является газ, в зависимости от характеристик применения измерения потока, определяются один или более размерных коэффициентов Cνклапана для жидкости, размерный коэффициент клапана Cg для газа и/или восстановительный коэффициент C1 для клапана, связанные с определяемым положением дроссельного элемента.
На стадии 82 измерительный модуль потока определяет скорость потока текучей среды, протекающей через трубопровод, на основе определяемого давления выше по течению P1, определяемого давления ниже по течению P2, температуры текучей среды Т и определяемых размерных коэффициентов клапана. Нужно отметить, что температура текучей среды Т является необходимой для определения скорости потока, только если измеряемая текучая среда является газом. Более конкретно, если измеряемая текучая среда является жидкостью, измерительный модуль 34 потока вычисляет скорость потока Q в соответствии с размерным уравнением для жидкости, как отмечено ниже.

где Q - скорость потока жидкости,
Cν- размерный коэффициент клапана для жидкости, связанный с определяемым положением дроссельного элемента,
P1- определяемое давление выше по течению,
P2 - определяемое давление ниже по течению, и
G - удельный вес жидкости.
Если измеряемая текучая среда является газом, измерительный модуль 34 потока вычисляет скорость потока Q в соответствии с размерным уравнением для газа, как отмечено ниже.

где Q - скорость потока газа,
Cg - размерный коэффициент клапана для газа, связанный с определяемым положением дроссельного элемента,
С1 - восстановительный коэффициент для клапана, связанный с определяемым положением дроссельного элемента,
G - удельный вес газа, Т - температура текучей среды, P1 - определяемое давление выше по течению, P2 - определяемое давление ниже по течению.
Раз измерительный модуль 34 потока определил скорость потока текучей среды, протекающей через канал внутри управляющей клапанной сборки 10, измерительный модуль 34 потока генерирует сигнал скорости потока, отображающий определенную скорость потока. Сигнал скорости потока может передаваться к системе управления 13, если требуется.
В альтернативном варианте реализации измерительный модуль потока может быть адаптирован для работы в сочетании с управляющей клапанной сборкой, включающей аналоговый позиционер. Система управления часто контролирует операции процесса и выдает координаты положения по отношению к управляющей клапанной сборке для подходящего расположения дроссельного элемента внутри канала для управления скоростью потока текучей среды через трубопровод. Измерительный модуль потока коммуникативно подсоединяется к системе управления, чтобы также принимать данные о координатах положения, выданные системой управления. Измерительный модуль потока использует принятые данные о координатах положения для определения приблизительного положения дроссельного элемента внутри канала. Приблизительное положение дроссельного элемента затем используется для определения связанных с ним размерных коэффициентов для клапана и получения скорости потока способом, описанным ранее.
Нужно отметить, что хотя были описаны способы определения скоростей потока в соответствии с размерным уравнением для жидкости и размерным уравнением для газа, использование альтернативных форм размерных уравнений, таких как уравнения для пара, тех, которые получены различными компаниями, тех, которые основаны на различных промышленных стандартах, которые будут очевидны для квалифицированного специалиста, также рассматривается как находящееся в рамках изобретения. Кроме того, измерительные модули потока, адаптированные для работы с размерными коэффициентами клапана, требующие коррекции на основе факторов, таких, например, как вязкость, оплавление и кавитация и т.п., также считаются находящимися в рамках объема изобретения.
Другие модификации и альтернативные варианты реализации изобретения будут очевидными для квалифицированного специалиста с точки зрения приведенного выше описания. Описание должно быть сконструировано только как иллюстративное, с целью обучения квалифицированных специалистов наилучшему способу реализации изобретения. Детали структуры и способ могут изменяться по существу без отступления от сути изобретения, и сохраняется право исключительного использования всех модификаций, которые находятся внутри объема прилагаемой формулы изобретения.
Реферат
Измерительный модуль потока предназначен для работы совместно с системой управления и с управляющей клапанной сборкой для регулирования потока текучей среды через канал. Измерительный модуль потока соединен с интеллектуальным позиционером внутри управляющей клапанной сборки для приема данных, относящихся к положению дроссельного элемента внутри канала. Положение дроссельного элемента используется для идентификации, по меньшей мере, одного связанного с ним размерного коэффициента клапана. Измерительный модуль потока измеряет скорость потока текучей среды через канал на основе определяемого давления выше по течению, определяемого давления ниже по течению и размерного коэффициента клапана, связанного с положением дроссельного элемента внутри канала. Изобретение может легко встраиваться в существующую систему управления процессом без прерывания потока, при минимизации нежелательного удаления функциональных устройств управления процессом. 2 н. и 41 з.п. ф-лы, 5 ил.
Формула



Комментарии