Способ определения потока массы сыпучего материала и устройство управления и регулирования для осуществления способа - RU2762525C2
Код документа: RU2762525C2
Чертежи



Описание
Область техники
Предлагаемое изобретение относится к способу определения потока массы сыпучего материала в соответствии с ограничительной частью пункта 1 формулы изобретения и к устройству управления и регулирования для самоходной уборочной машины в соответствии с пунктом 10 формулы.
Уровень техники
Для определения потока массы сыпучего материала, в частности, зерновых культур, транспортируемого из расположенной ниже области захвата сыпучего материала в расположенную выше область выгрузки сыпучего материала при помощи бесконечно обращающегося транспортирующего устройства, содержащего плоскостные транспортировочные элементы, причем сыпучий материал, выгружаемый из транспортирующего устройства, под действием направляющей поверхности, расположенной в области выгрузки сыпучего материала, отклоняется в направлении измерительного устройства, известен способ определения потока массы посредством измерения силы, действующей на чувствительную поверхность измерительного устройства.
Способ подобного рода раскрыт в патентной заявке ЕР 1169905 А1. Заявка ЕР 1169905 А1 описывает транспортирующее устройство с бесконечно обращающейся транспортировочной цепью, на которой установлены транспортировочные лопатки. Транспортировочные лопатки ускоряют находящийся на них сыпучий материал в точке отклонения в направлении корпуса, окружающего транспортирующее устройство в области выгрузки сыпучего материала. Сыпучий материал движется вдоль внутренней поверхности корпуса и отклоняется в направлении чувствительной поверхности измерительного устройства. Измерительное устройство рассчитано на измерение центробежных сил, развиваемых потоком массы на чувствительной поверхности. На основании измеренной центробежной силы можно определить поток массы. Способ, известный из патентной заявки ЕР 1169905 А1, при определении потока массы учитывает размер частиц сыпучего материала. При выгрузке сыпучего материала с транспортировочных лопаток путем сбрасывания в направлении чувствительной поверхности развиваются различные скорости, зависящие от размера частиц.
Сущность изобретения
Задачей настоящего изобретения является разработка способа определения потока массы и устройства управления и регулирования для осуществления способа, которые будут отличаться повышенной точностью определения расхода.
Согласно изобретению, эта задача решена способом с признаками, раскрытыми в пункте 1 формулы, а также устройством управления и регулирования с признаками, раскрытыми в пункте 10 формулы.
Выгодные варианты осуществления раскрыты в зависимых пунктах формулы изобретения, относящихся к указанным выше независимым пунктам.
Согласно пункту 1 формулы изобретения предложен способ определения потока массы сыпучего материала, в частности, зерновых культур. С помощью бесконечно обращающегося транспортирующего устройства, содержащего плоскостные транспортировочные элементы, сыпучий материал транспортируют из расположенной ниже области захвата сыпучего материала в расположенную выше область выгрузки сыпучего материала, причем сыпучий материал, выгружаемый из транспортирующего устройства, отклоняется в направлении измерительного устройства посредством направляющей поверхности, расположенной в области выгрузки сыпучего материала. Поток массы определяют измерением результирующей центробежной силы, действующей на чувствительную поверхность измерительного устройства. Для повышения точности определения расхода выполняют компенсацию, по меньшей мере, двух параметров, влияющих на измерение силы, в частности, не зависящих от свойств сыпучего материала. Первый параметр, компенсируемый при определении потока массы или расхода, обеспечиваемого транспортирующим устройством, представляет собой силы трения, развиваемые сыпучим материалом при движении вдоль чувствительной поверхности. Помимо этого первого параметра, влияющего на измерение силы, предусмотрен, по меньшей мере, один второй параметр, способный влиять на результат измерения силы. Под ним понимают параметр, отражающий внешние воздействия, постоянно или лишь временно влияющие на измерение или на силы, приложенные к чувствительной поверхности движущимся мимо нее сыпучим материалом.
Предпочтительно, силы трения, передаваемые сыпучим материалом на чувствительную поверхность, можно компенсировать подходящей конструкцией измерительного устройства, в которой вектор результирующей силы трения ориентирован перпендикулярно направлению измерения. При этом поток материала, выбрасываемый по параболической траектории, соприкасается с чувствительной поверхностью, и результирующая сила трения учитывается измерительным устройством в осевом направлении, то есть не измеряется. Для этого измерительное устройство может содержать элемент измерения силы, выполненный в виде платформенных весов.
Кроме того, можно определять и компенсировать наклон измерительного устройства. Во время уборки урожая уборочная машина может наклоняться в поперечном и/или продольном направлении, что обусловлено свойствами почвы. Этот наклон влияет на результирующую центробежную силу, измеренную измерительным устройством. Измерение результирующей центрирующей силы, действующей на чувствительную поверхность, может быть произведено в полном объеме только в том случае, если оно действует точно в направлении измерения измерительного устройства, то есть элемента измерения силы. При изменении наклона измерительного устройства или уборочной машины сила тяжести будет действовать на чувствительную поверхность и поток массы под иным углом. Изменение результирующей центробежной силы и силы, измеренной элементом измерения силы, обусловленное найденным наклоном уборочной машины, рассчитывают соответствующим образом и, тем самым, компенсируют при определении расхода или объема убранной культуры.
Кроме того, можно компенсировать внешние механические силы, действующие на транспортирующее устройство, по существу, в вертикальном направлении. Под такими силами понимают силы ускорения, передаваемые уборочной машиной при движении по полю, а также приводами уборочной машины на измерительное устройство в виде вибраций. Действие таких сил ускорения на измерительное устройство приводит к отклонению сил, измеренных элементом измерения силы, в момент возникновения ускорения. Так, прохождение углубления в грунте может привести к резкому ускорению, по существу, в вертикальном направлении, которое повлияет на измерение центробежной силы, развиваемой потоком убранной культуры, проходящим по чувствительной поверхности. Кроме того, на измерительное устройство влияют другие аспекты динамики движения, в частности, положительное или отрицательное ускорение уборочной машины. То же самое справедливо для вызванных приводами уборочной машины колебаний и вибраций, передающихся через кузов или элементы привода. Такие дополнительные силы, вызванные ускорением, также можно компенсировать.
Кроме того, можно компенсировать снижение частоты вращения транспортирующего устройства. Причиной снижения частоты вращения транспортирующего устройства является временное снижение частоты вращения привода уборочной машины. Для определения такого снижения осуществляют контроль частоты вращения. При этом датчики могут контролировать не только частоту вращения привода уборочной машины, но и частоту вращения транспортирующего устройства. Временное снижение частоты вращения привода приводит к снижению частоты вращения или уменьшению скорости транспортировки бесконечно обращающегося транспортирующего устройства. Обусловленное этим снижение скорости потока сыпучего материала, проходящего вдоль чувствительной поверхности, то есть уменьшение результирующей центробежной силы потока сыпучего материала, воздействующей на чувствительную поверхность, рассчитывают соответствующим образом. Таким образом, результирующую центробежную силу потока сыпучего материала, воздействующую на чувствительную поверхность, определяют с учетом уменьшения скорости при измерении силы измерительным устройством, предназначенным для определения расхода.
Предпочтителен вариант, в котором в целях калибровки измерительного устройства сыпучий материал взвешивают несколько раз и по полученным результатам определяют поправочный коэффициент. Калибровку измерительного устройства можно выполнить однократно на весь срок службы уборочной машины. Тем не менее, предпочтительно, калибровку выполняют один раз в начале соответствующего уборочного сезона.
В предпочтительном варианте осуществления можно определять влажность сыпучего материала. Влажность сыпучего материала является дополнительным параметром, влияющим на определение потока массы на основании измерения силы измерительным устройством. По мере увеличения влажности может возрастать общая масса отдельных частиц сыпучего материала. Увеличение влажности убираемой культуры может влиять на скорость движения потока убранной культуры вдоль чувствительной поверхности. Кроме того, влажность может влиять на трение сцепления между сыпучим материалом и чувствительной поверхностью, с одной стороны, и между отдельными частицами сыпучего материала, с другой стороны. В результате центробежная сила, развиваемая сыпучим материалом при движении по чувствительной поверхности при постоянном расходе, может изменяться. Для компенсации этого влияния можно изменять характеристику распознавания измерительного устройства в зависимости от влажности сыпучего материала.
Кроме того, следует дополнительно учитывать вид сыпучего материала. Вид и свойства сыпучего материала оказывают существенное влияние на измерение. Размер и масса отдельных частиц сыпучего материала определяют траекторию сброса с транспортировочных элементов транспортирующего устройства в точке их отклонения в области выгрузки сыпучего материала.
В частности, измерительную характеристику измерительного устройства можно адаптировать в зависимости от вида материала и его физических свойств.
При этом поток массы определяют независимо от плотности.
Согласно пункту 10 предложено устройство управления и регулирования для осуществления способа определения потока массы сыпучего материала, в частности, по одному из предыдущих пунктов 1-9, причем поток массы в самоходной уборочной машине, в частности, зерноуборочном комбайне, направляют с помощью бесконечно обращающегося транспортирующего устройства, содержащего плоскостные транспортировочные элементы, из расположенной ниже области захвата сыпучего материала в расположенную выше область выгрузки сыпучего материала, в которой сыпучий материал, выгружаемый из транспортирующего устройства, может отклоняться в направлении измерительного устройства посредством направляющей поверхности, расположенной в области выгрузки сыпучего материала, причем поток массы определяют измерением силы, действующей на чувствительную поверхность измерительного устройства, причем устройство управления и регулирования выполнено с возможностью компенсации, по меньшей мере, двух параметров, влияющих на измерение силы измерительным устройством и, в частности, не зависящих от свойств сыпучего материала.
Для этого устройство управления и регулирования можно соединить с возможностью передачи сигналов, по меньшей мере, с одним датчиком, служащим для регистрации, по меньшей мере, одного параметра, влияющего на измерение силы.
Так, по меньшей мере, один датчик может быть выполнен в виде датчика ускорения.
Кроме того, по меньшей мере, один датчик может быть выполнен в виде датчика наклона.
Кроме того, по меньшей мере, один датчик может быть выполнен в виде датчика частоты вращения.
В частности, устройство управления и регулирования может содержать запоминающее устройство, в котором записаны различные характеристики распознавания измерительного устройства, которые можно выбирать в зависимости от параметра убираемой культуры, в частности, вида и/или влажности убираемой культуры. Для этого можно обращаться к редактируемой таблице видов культур, которая может быть записана в устройство контроля и регулирования. Эти характеристики распознавания также могут быть записаны в устройство управления и регулирования в виде поля характеристик.
Краткое описание чертежей
Ниже приводится детальное описание предложенного изобретения на основании вариантов осуществления, представленных на фигурах, на которых изображено:
Фигура 1: схематичный вид сбоку зерноуборочного комбайна.
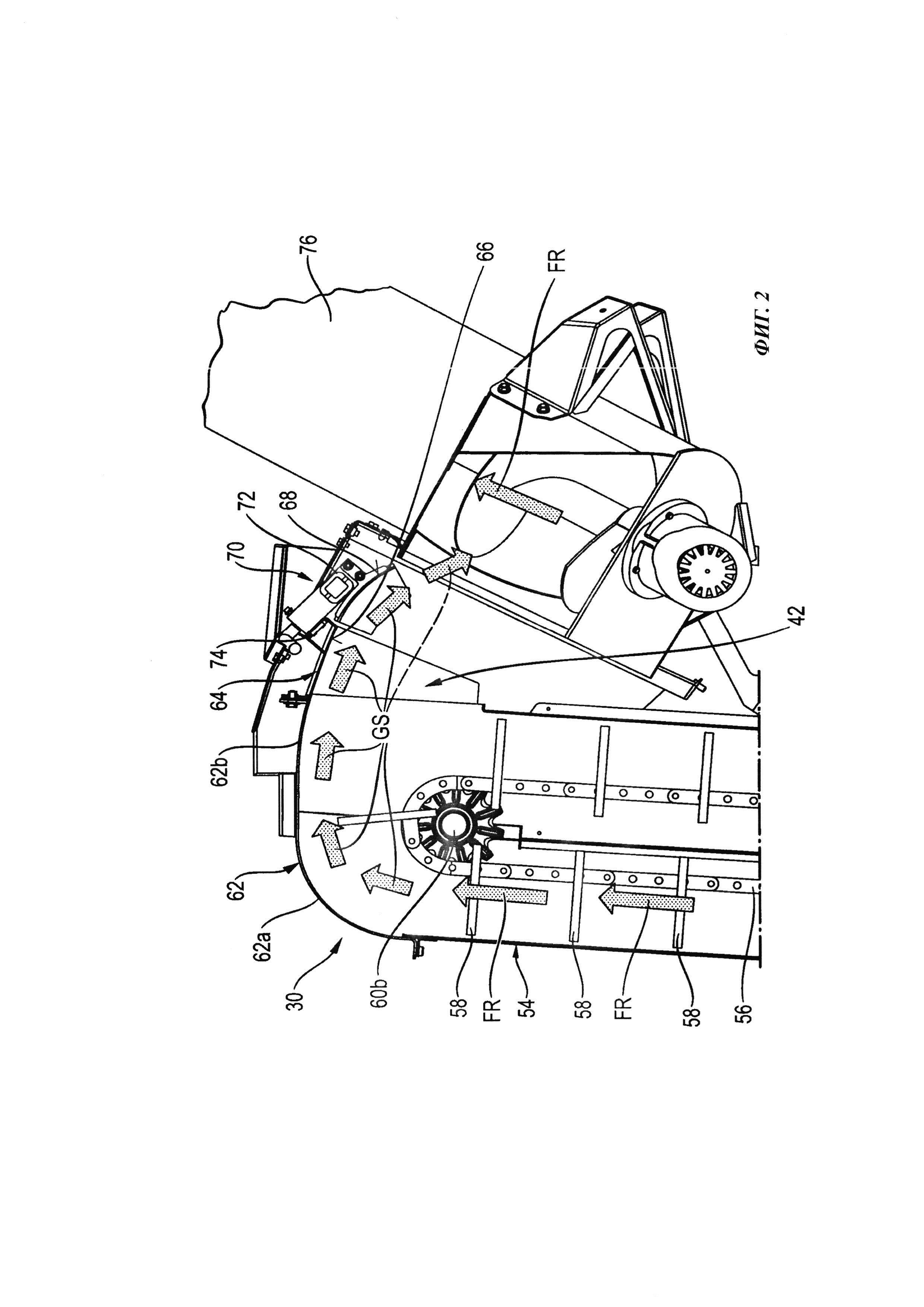
Фигура 2: фрагмент транспортирующего устройства зерноуборочного комбайна, выполненного в виде цепного транспортера.
Фигура 3: упрощенное изображение фрагмента транспортирующего устройства, показанного на фигуре 2.
Фигура 4: фрагмент альтернативной конструкции измерительного устройства в верхней части транспортирующего устройства.
Осуществление изобретения
На фигуре 1 представлена сельскохозяйственная уборочная машина в смысле настоящего изобретения, представляющая собой самоходный зерноуборочный комбайн 10. Зерноуборочный комбайн 10 оснащен разнообразными рабочими агрегатами 14, предназначенными для захвата и обработки убираемой культуры 12. В данном зерноуборочном комбайне 10 к рабочим агрегатам 14 относится жатка 16, предназначенная для захвата убираемой культуры 12, и соединенный с ней наклонный транспортер 18, предназначенный для транспортировки убранной культуры 12 в зерноуборочный комбайн. С наклонного транспортера 18 убранная культура 12 в виде потока убранной культуры поступает на обмолачивающее устройство 20 зерноуборочного комбайна 10, выполненное в виде дополнительного рабочего агрегата 14. С помощью отклоняющего барабана 22 поток убранной культуры поступает в сепарирующее устройство 24, выполненное в виде разделительного ротора и предназначенное для осаждения свободно перемещающихся зерен из потока культуры в нижнюю часть комбайна. Далее поток убранной культуры поступает через возвратное днище 26 на очищающее устройство 28, содержащее просеивающие решетки и воздуходувное устройство для очистки убранной культуры. Свободно перемещающиеся зерна из потока убранной культуры транспортируются в зерновой бункер 32 транспортирующим устройством 30, выполненным в виде цепного транспортера. Для этого транспортирующее устройство 30 захватывает очищенную культуру в нижней области 40 захвата сыпучего материала, расположенной в нижней части транспортирующего устройства 30, и транспортирует ее в верхнюю область 42 выгрузки сыпучего материала, расположенную в верхней части транспортирующего устройства 30. Кроме того, зерноуборочный комбайн 10 содержит приводной двигатель 34, обеспечивающий приводную мощность, необходимую для работы рабочих агрегатов 14 и движения зерноуборочного комбайна 10, например, с помощью гидростатического ходового привода (не показанного на фигуре). Для этого рабочие агрегаты 14 и ходовой привод зерноуборочного комбайна 10 соединяют с приводным механизмом 34 в целях передачи энергии.
Кроме того, зерноуборочный комбайн 10 содержит управляющее и регулирующее устройство 52, соединенное с устройством 80 ввода и вывода внутри кабины зерноуборочного комбайна 10 с возможностью передачи сигналов. Кроме того, управляющее и регулирующее устройство 52 соединено с несколькими датчиками, установленными на зерноуборочном комбайне 10 и предназначенными для определения эксплуатационных параметров и параметров убираемой культуры. Под датчиками 20, установленными на зерноуборочном комбайне 10 или внутри него, понимают, в частности, датчик 44 влажности для определения влажности убранной культуры (в частности, очищенной), по меньшей мере, один датчик 46 частоты вращения, предназначенный для контроля частоты вращения приводного двигателя 34, датчик 50 наклона и, по меньшей мере, один датчик 48 ускорения, определяющий ускорения, действующие на зерноуборочный комбайн 10 и обусловленные перемещением по полю или приводным двигателем 34 и прочими компонентами зерноуборочного комбайна 10, передающими приводное усилие. Возможна установка дополнительных датчиков, регистрирующих эксплуатационные параметры и параметры убираемой культуры, которые могут влиять, в частности, на измерение расхода очищенной культуры в транспортировочном устройстве 30.
На фигуре 2 представлен фрагмент транспортировочного устройства 30, выполненного в виде цепного транспортера для комбайна 10. Транспортирующее устройство 30 содержит корпус 54, окружающий основную часть бесконечно обращающейся транспортировочной цепи 56, которая приводится в движение и отклоняется соответствующим нижним и верхним цепным или ведущим колесом 60а, 60b, расположенным в области 40 захвата сыпучего материала или в области 42 выгрузки сыпучего материала. В области 40 захвата сыпучего материала и в области 42 выгрузки сыпучего материала корпус 54 имеет отверстия, через которые подают и отводят убранную культуру. На бесконечно обращающейся транспортировочной цепи 56 на равном удалении друг от друга расположены плоскостные транспортирующие элементы 58. Транспортирующие элементы 58 в форме лопастей ориентированы, по существу, перпендикулярно транспортировочной цепи 56. Направление подачи и возврата транспортирующего устройства 30 обозначено стрелками FR. Так, к транспортирующему устройству 30 может быть присоединен, по меньшей мере, один датчик 46, контролирующий скорость подачи транспортирующего устройства 30. Этот датчик может быть выполнен в виде датчика 46 частоты вращения, контролирующего частоту вращения одного из цепных зубчатых колес 60а, 60b. В альтернативном варианте может быть предусмотрен оптический датчик, определяющий временные промежутки между проходящими транспортирующими элементами 58.
В области 42 выгрузки сыпучего материала верхнее цепное колесо 60b частично окружено цельным или составным участком 62 крыши. Участок 62 крыши содержит первую часть 62а с сечением в форме, по существу, сектора круга, частично охватывающую верхнее цепное колесо 60b в радиальном направлении. На стороне, обращенной к области 42 выгрузки сыпучего материала, участок 62 крыши содержит вторую часть 62b с сечением в форме, по существу, прямоугольника. При этом радиус кривизны второй части 62b меньше радиуса кривизны первой части 62а участка 62 крыши.
К участку 62 крыши примыкает направляющая часть 64. Направляющая часть 64 выполнена в виде отдельного компонента. Переход 78 между участком 62 крыши и направляющей частью 64, обращенный к верхнему цепному колесу 60b, имеет тангенциальную траекторию в окружном направлении. При этом направляющая часть 64 на участке 62 крыши, по существу, не имеет уступов, образуя тангенциальный переход. Транспортирующие элементы 58, находящиеся, по существу, в горизонтальной плоскости перед достижением верхнего цепного колеса 60b, транспортируют убранную культуру сначала из нижней области 40 захвата сыпучего материала в верхнюю область 42 выгрузки сыпучего материала. Путем отклонения транспортирующих элементов 58 вокруг верхнего цепного колеса 60b убранную культуру, находящуюся на плоском транспортировочном элементе 58, выгружают в радиальном направлении участка 64 крыши. При этом внутренняя поверхность участка 62 крыши, обращенная к цепному колесу 60b, ограничивает траекторию полета убранной культуры, выгружаемой транспортировочными элементами 58 по параболической траектории, в радиальном направлении. Стрелки GS показывают движение потока сыпучего материала или убранной культуры вдоль участка 62 крыши, направляющего участка 64 и чувствительной поверхности 68.
На направляющем участке 64 расположено измерительное устройство 70. Для этого на внешней стороне направляющего участка 64 предусмотрено крепление 74. На креплении 74 установлен элемент 72 измерения силы. На элементе 72 измерения силы находится чувствительная поверхность 68, искривленная в соответствии с траекторией GS потока. Элемент 72 измерения силы и чувствительная поверхность 68 входят в состав измерительного устройства 70. Направляющая часть 64 содержит направляющую поверхность 66, обращенную к верхнему цепному колесу 60b. Следующий переход 78 между направляющей поверхностью 66 направляющей части 64 и чувствительной поверхностью 68 измерительного устройства 70 также имеет тангенциальную траекторию. Чувствительная поверхность 68 измерительного устройства 70 расположена в верхней части транспортирующего устройства 30 таким образом, чтобы переход 78 от направляющей поверхности 66 к чувствительной поверхности 68 имел тангенциальный профиль. При этом измерительное устройство 70 располагают в области выгрузки транспортирующего устройства 30, то есть после того, как убранная культура полностью покинет транспортировочные элементы 58 в форме лопастей. Чувствительная поверхность 68 устойчива к износу и абразивному воздействию и характеризуется шероховатостью.
Убранная культура, выгружаемая из транспортирующего устройства 30 в области 42 выгрузки сыпучего материала, поступает на подающий шнек 76, транспортирующий ее в зерновой бункер 32.
На фигуре 3 в упрощенном виде показана верхняя часть транспортирующего устройства 30 согласно фигуре 2. На этой фигуре отсутствуют компоненты транспортирующего устройства 30, расположенные ниже верхнего цепного колеса 60b, а также подающий шнек 76, расположенный в области 42 выгрузки сыпучего материала. На фигуре показан транспортирующий элемент 58, свободный конец 58а которого находится в зените верхнего цепного колеса 60b. В этом положении транспортировочного элемента 58, называемом зенитом, расстояние между свободным концом 58а и участком 62 крыши, частично окружающим транспортировочное устройство 30 в области 42 выгрузки сыпучего материала, минимально. С достижением этого положения соответствующего транспортировочного элемента 58 необходимо обеспечить практически полную выгрузку убранной культуры, находящейся на транспортировочном элементе 58. Для этого расстояние между свободным концом 58а соответствующего транспортировочного элемента 58 и участком 62 крыши, окружающим транспортировочное устройство 30 в области 42 выгрузки сыпучего материала, в положении транспортировочного элемента 58, в котором расстояние до участка 62 крыши минимально, выбирают таким образом, чтобы можно было практически полностью выгрузить сыпучий материал, находящийся на транспортировочном элементе 58, и реализовать равномерную подачу потока на чувствительную поверхность 68. При этом участок 62 крыши и свободный конец 58а соответствующего транспортировочного элемента 58, находящийся в точке зенита, удалены друг от друга на минимальное расстояние А. Минимальное расстояние А равно расстоянию В между свободным концом 58а транспортировочного элемента 58 и его точкой 58b отклонения на бесконечно обращающейся транспортировочной цепи 56 транспортирующего устройства 30 или превышает его. При этом расстояние В соответствует половине расстояния от свободного конца 58а транспортировочного элемента 58 до делительного диаметра D верхнего цепного колеса 60b. Для поддержания постоянного минимального расстояния А предусмотрено натяжное устройство, предназначенное для натяжения транспортировочной цепи и расположенное в нижней части транспортирующего устройства 30.
Кроме того, на фигуре 3 показана конструкция измерительного устройства 70. Измерительное устройство 70 опирается на крепление 74 на направляющей части 64 посредством корпуса, в который входит элемент 72 измерения силы. Чувствительная поверхность 68 соединена с транспортирующим устройством 30 лишь посредством элемента 72 измерения силы. Это позволяет исключить влияние помех, обусловленных гистерезисом возможной опоры. Переходы 78 между второй частью 62b участка 62 крыши и направляющей частью 64, а также между направляющей частью 64 и чувствительной поверхностью 68 измерительного устройства 70 имеют, как уже было сказано выше, тангенциальный профиль. Соответствующий тангенциальный профиль переходов 78 гарантирует поступление потока убранной культуры на чувствительную поверхность 68 по тангенциальной траектории.
Элемент 72 измерения силы выполнен в виде платформенных весов. Элемент 72 измерения силы такого типа измеряет силы, действующие на чувствительную поверхность 68, независимо от плеча силы, определяемого расстоянием между точкой монтажа на креплении 74 и расположением чувствительной поверхности на элементе 72 измерения силы. Поток убранной культуры, движущийся вдоль чувствительной поверхности 68, отклоняясь, создает обусловленную уклоном и силой тяжести результирующую центробежную силу, обозначенную вектором F_G силы. Элемент 72 измерения силы установлен таким образом, чтобы направления измерения измерительного устройства 70 и результирующей центробежной силы F_G, действующей на чувствительную поверхность 68, совпадали. Элемент 72 измерения силы воспринимает измеренную силу, обозначенную результирующим вектором F_K силы. Ориентация вектора F_K силы совпадает с направлением измерения элемента 72 измерения силы. Трение проходящего потока убранной культуры о чувствительную поверхность 68 вызывает силы трения, обозначенные вектором F_R силы. Профиль вектора F_R результирующих сил трения параллелен продольной оси LA элемента 72 измерения силы или перпендикулярен направлению измерения элемента 72 измерения силы, вследствие чего возникающие силы трения не участвуют в измерении силы для определения расхода. Такая конструкция чувствительной поверхности 68 компенсирует силы трения.
Ниже будет описан способ определения потока массы очищенной убранной культуры, направляемого транспортирующим устройством 30 в зерновой бункер 32. Как было сказано выше, очищенная убранная культура, выгружаемая транспортирующим устройством 30, отклоняется направляющей поверхностью 66 направляющей части 64 в области 42 выгрузки сыпучего материала в направлении чувствительной поверхности 68 измерительного устройства 70. Массу потока убранной культуры определяют измерением результирующей центробежной силы (вектора F_G силы), действующей на чувствительную поверхность 68 измерительного устройства 70, причем компенсируются, по меньшей мере, два параметра, влияющих на это измерение силы. С одной стороны, особая конструкция элемента 72 измерения силы компенсирует результирующую силу трения (вектор F_R силы), вызываемую движением потока убранной культуры по чувствительной поверхности 68.
Кроме того, предусмотрена компенсация, по меньшей мере, второго параметра, влияющего на измерение силы. Под параметрами, влияющими на измерение силы, понимают, в частности, внешние механические силы, действующие на транспортирующее устройство 30, по существу, в вертикальном направлении, снижение частоты вращения или скорости транспортировки в транспортирующем устройстве 30, а также наклон измерительного устройства 70. Также учитывается вид убираемой культуры и ее свойства, в частности, влажность культуры. В зависимости от вида убираемой культуры масса и размер отдельных частиц очищенной убранной культуры влияют на характеристики потока и результирующую центробежную силу F_G, действующую на чувствительную поверхность 68. Влажность убранной культуры может влиять на скорость, с которой убранная культура движется после сброса с соответствующего транспортировочного элемента 58 вдоль направляющей части 64 и чувствительной поверхности 68. Кроме того, влажность убранной культуры может влиять на статическое трение убранной культуры.
Чтобы учесть эти влияния при определении потока массы на основании измерения силы измерительным устройством 70, управляющее и регулирующее устройство 52 соединено с датчиками 44, 46, 48 с возможностью передачи сигналов. Соответствующий датчик 44, 46, 48 подает сигнал, отражающий соответствующую контролируемую измеряемую величину; управляющее и регулирующее устройство 52 принимает и анализирует сигнал и учитывает его влияние на результирующую силу F_K, измеренную элементом 72 измерения силы.
Так, датчик 46 частоты вращения позволяет определять временное снижение, то есть падение частоты вращения приводного двигателя 34. Временное снижение частоты вращения приводного двигателя 34 приводит к снижению частоты вращения или уменьшению скорости транспортировки транспортирующего устройства 30. Управляющее и регулирующее устройство 52 соответственно рассчитывает связанное с этим уменьшение скорости потока убранной культуры вдоль чувствительной поверхности 68, означающее уменьшение расхода. Таким образом, результирующая центробежная сила F_G, с которой поток убранной культуры действует на чувствительную поверхность 68, определяется с учетом уменьшения скорости при измерении силы измерительным устройством 70 в целях определения расхода.
Другим параметром, влияющим на определение потока массы на основании измерения сил измерительным устройством 70, является влажность убранной культуры. Содержание влаги в убранной культуре зависит от времени уборки урожая и внешних условий окружающей среды, в частности, погодных условий. Чем больше влажность, тем выше может быть общий вес зерна. Более важно влияние на скорость, с которой движется убранная культура после сброса с соответствующего транспортировочного элемента 58, и влияние на характеристики трения. Соответственно, оказываемые проходящим потоком культуры на чувствительную поверхность 68 результирующие силы, результирующая центробежная сила F_G и результирующая сила трения, могут изменяться при сохранении расхода. Для компенсации этого влияния характеристику распознавания измерительного устройства 70 изменяют в зависимости от влажности убираемой культуры. Для определения влажности очищенной убранной культуры, как было отмечено выше, в зерноуборочный комбайн 10 можно устанавливать датчик 44 влажности. Предпочтительно, этот датчик 44 влажности устанавливают в области 40 захвата сыпучего материала. В альтернативном варианте можно вручную определить содержание влаги в убираемой культуре в начале уборки урожая. Результат такого ручного определения влажности можно передать на управляющее и регулирующее устройство 52 при помощи устройства 80 ввода и вывода, чтобы соответствующим образом изменить характеристики распознавания измерительного устройства 70.
При уборке урожая зерноуборочным комбайном 10 характер обрабатываемой почвы может приводить к продольному и/или поперечному наклону зерноуборочного комбайна 10, а динамика движения может приводить к изменениям ускорения. Элемент 72 измерения силы измеряет результирующую центробежную силу F_G, действующую на чувствительную поверхность 68, в полном объеме лишь в том случае, если она действует точно в направлении измерения элемента 72 измерения силы. Если наклон элемента 72 измерения силы изменяется относительно наклона зерноуборочного комбайна 10, то сила тяжести будет действовать на чувствительную поверхность 68 и поток убранной культуры под другим углом. Изменение результирующей центробежной силы F_G и результирующей силы F_K, измеренной элементом 72 измерения силы, под действием наклона зерноуборочного комбайна 10 рассчитывается соответствующим образом и, таким образом, компенсируется при определении расхода или пропускной способности на основании измерения силы. Такая компенсация может производиться внутри измерительного устройства 70. В альтернативном варианте датчик 50 наклона расположен на зерноуборочном комбайне 10 или внутри него. Сигналы, принимаемые датчиком 50 наклона и отражающие продольный и/или поперечный наклон, передаются в управляющее и регулирующее устройство 52 и анализируются им. Управляющее и регулирующее устройство 52 на основании этих значений наклона компенсирует влияние наклона на определение расхода.
Кроме того, на определение расхода влияют внешние механические силы, действующие на транспортирующее устройство 30, по существу в вертикальном направлении. Под ними понимают силы ускорения, возникающие в результате движения по полю или воздействия приводов зерноуборочного комбайна 10. В последнем случае речь идет о вибрациях, передаваемых приводом и приводными элементами зерноуборочного комбайна на кузов и, следовательно, транспортировочное устройство 30. Эти силы также воздействуют на измерительное устройство 70, вызывая отклонения результирующих сил F_K, измеренных элементом 72 измерения силы во время начала ускорения. Так, прохождение углубления в почве может привести к внезапному ускорению, по существу, в вертикальном направлении, что повлияет на измерение результирующей центробежной силы F_G, вызываемой движением потока культуры по чувствительной поверхности 68. Эта дополнительная сила, вызванная ускорением, также компенсируется. При этом такая компенсация также может производиться внутри измерительного устройства 70. В альтернативном варианте датчик 48 ускорения располагают на зерноуборочном комбайне 10 или внутри него. Сигналы этого датчика также принимаются и анализируются управляющим и регулирующим устройством 52, что позволяет компенсировать влияние ускорения на измерение силы.
С целью компенсации этих факторов воздействия в память управляющего и регулирующего устройства 52 с возможностью последующего вызова записаны соответствующие алгоритмы или характеристики распознавания, которые могут быть ориентированы на вид убираемой культуры или уборочной машины.
На фигуре 4 представлена альтернативная конструкция измерительного устройства 70. В этом варианте осуществления чувствительная поверхность 68 находится в первой части 62а участка 62 крыши. При этом направляющая поверхность 66 входит в состав первой части 62а участка 62 крыши. Расположение измерительного устройства 70, то есть элемента 72 измерения силы и чувствительной поверхности 68, в первой части 62а означает нахождение за пределами зернового бункера 34. В этом варианте осуществления направляющая поверхность 66 расположена в верхней области входа транспортирующего устройства 30, то есть перед точкой отклонения транспортирующих элементов 58. Такое расположение или позиционирование чувствительной поверхности 68 выгодно тем, что убираемая культура отклоняется сильнее вследствие повышенной кривизны чувствительной поверхности 68. Таким образом, на чувствительную поверхность 68 воздействуют повышенные силы, что позволяет легко измерять даже малый расход убранной культуры. Кроме того, вследствие небольшого расстояния между свободным концом 58а транспортировочного элемента 58 и чувствительной поверхностью 68 в этой области происходит активное движение убранной культуры. Это приводит к уменьшению влияния трения при измерении потока массы. Кроме того, активное движение убранной культуры обеспечивает непрерывность потока культуры, на который в меньшей степени влияет сила тяжести.
Расположение измерительного устройства 70 вне зернового бункера 34 требует принятия мер, препятствующих потере урожая вследствие выброса в области между участком 62 крыши и измерительным устройством 68.
Одна из возможных мер заключается в уплотнении чувствительной поверхности 68 по периметру относительно первой части 62а, позволяющем избежать потерь убранной культуры. Также можно поддерживать минимальный зазор между чувствительной поверхностью 68 и первой частью 62а, не пропускающий убранную культуру. В альтернативном варианте можно обеспечить улавливание убранной культуры, падающей в зазор между чувствительной поверхностью 68 и первой частью 62а, специальным устройством и ее возврат на транспортировочное устройство.
Чтобы, несмотря на наличие уплотнения, обеспечить измерение расхода с соединением чувствительной поверхности 68 с первой частью 62а участка 62 крыши, для уплотнения используют эластичный материал. Эластичный материал уплотнения позволяет чувствительной поверхности 68 незначительно отклоняться в направлении измерения элемента 72 измерения силы под действием результирующей центробежной силы F_G. Измерение центробежной силы F_G, передаваемой потоком убранной культуры на чувствительную поверхность 68, определяют путем отклонения чувствительной поверхности 68 в направлении измерения относительно первой части 62а. При этом необходимо учитывать, что материал, используемый для уплотнения по периметру, вызывает результирующую восстанавливающую силу F_A, противоположную результирующей центробежной силе F_G. Эта результирующая восстанавливающая сила F_A компенсируется соответствующим образом с учетом специфических характеристик материала уплотнения и геометрических условий расположения элемента 72 измерения силы. Еще один аспект этого варианта осуществления предполагает изготовление участка 62 крыши из пластмассы.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 зерноуборочный комбайн
12 убранная культура
14 рабочие агрегаты
16 жатка
18 наклонный транспортер
20 обмолачивающее устройство
22 отклоняющий барабан
24 сепарирующее устройство
26 возвратное днище
28 очищающее устройство
30 транспортирующее устройство
32 зерновой бункер
34 приводной двигатель
40 область захвата сыпучего материала
42 область выгрузки сыпучего материала
44 датчик влажности
46 датчик частоты вращения
48 датчик ускорения
50 датчик наклона
52 управляющее и регулирующее устройство
54 корпус
56 транспортирующая цепь
58 транспортировочные элементы
58а свободный конец элемента 58
60а нижнее цепное колесо
60b верхнее цепное колесо
62 участок крыши
62а первая часть участка 62
62b вторая часть участка 62
64 направляющий участок
66 направляющая поверхность
68 чувствительная поверхность
70 измерительное устройство
72 элемент измерения силы
74 крепление
76 подающий шнек
78 тангенциальный переход
80 устройство ввода и вывода
А минимальное расстояние
В расстояние
D делительный диаметр элемента 60b
FR направление транспортировки
GS траектория потока
F_G вектор центробежной силы
F_R вектор силы трения
F_K вектор ускорения
F_A вектор восстанавливающей силы
Реферат
Предложенное изобретение относится к способу определения потока массы сыпучего материала, в частности зерновых культур, направляемого с помощью бесконечно обращающегося транспортирующего устройства (30), содержащего плоскостные транспортировочные элементы (58), из расположенной ниже области (40) захвата сыпучего материала в расположенную выше область (42) выгрузки сыпучего материала, в которой сыпучий материал, выгружаемый из транспортирующего устройства (30), отклоняется в направлении измерительного устройства (70) посредством направляющей поверхности (66), расположенной в области (42) выгрузки сыпучего материала, причем поток массы определяют измерением результирующей силы (F_G), действующей на чувствительную поверхность (68) измерительного устройства (70). Причем способ предусматривает компенсацию силы трения, передаваемой сыпучим материалом на чувствительную поверхность (68) и влияющей на измерение результирующей силы (F_G), расположением измерительного устройства (70), в котором результирующая сила трения (F_R) действует в направлении, перпендикулярном направлению измерения измерительного устройства (70), а также определение наклона измерительного устройства (70) и корректировку измеренного значения результирующей силы (F_G) с учетом определенного наклона. Технический результат – повышение точности измерения. 2 н. и 9 з.п. ф-лы, 4 ил.

Комментарии